Estudio y Diseño de una Plataforma de Entrenamiento de Alto Nivel en Control Electrónico a Partir de Sistemas de Control Distribuido (DCS)
166
0
0
Texto completo
(2) Estudio y Diseño de una Plataforma de Entrenamiento de Alto Nivel en Control Electrónico a partir de Sistemas de Control Distribuido (DCS). DAVID ALBERTO LUZ LUZ LUIS GERARDO FORERO PARDO. Proyecto de grado para optar al título de: Ingeniero en Control. Director Ing. M.Sc. MBA. ANDRÉS ESCOBAR DÍAZ. MONOGRAFÍA DE GRADO. UNIVERSIDAD DISTRITAL “FRANCISCO JOSÉ DE CALDAS” FACULTAD TECNOLÓGICA INGENIERÍA EN CONTROL BOGOTÁ COLOMBIA 2015. ii.
(3) iii. Dedicatoria. A la Esencia Creadora por ser mi guía en todo momento y brindarme la oportunidad de adquirir un conocimiento y aplicarlo en el diario vivir. A mis padres pero principalmente a mi madre (hijo único de madre soltera) por ser mi mayor aliciente y orgullo. A mi núcleo familiar y hermanos de la vida por brindarme su afecto, apoyo y paciencia. A los compañeros y amigos que se forjarón en este bello ciclo académico y por último y no menos importante a mi fiel amigo y compañero Duke. Gracias Totales. DAVID ALBERTO LUZ LUZ.
(4) Dedicatoria A Dios por todas las bendiciones que ha puesto en mi caminar. A mi linda madre, persona incondicional que día a día me ha llenado de amor y quien me ha acompañado en mi proyecto de vida y con sus tan incomparables consejos ha sabido guiar mis pasos. A mi hermosa esposa, amor de mi vida, con quien he compartido los mejores momentos y de quien he recibido el apoyo necesario para alcanzar los objetivos propuestos. A mi Príncipe Sebastián y mi Princesita Sophia, quienes han convertido mi vida entera en un paraíso de felicidad y quienes me enseñan día a día a proyectar nuevas metas. A mi mamita Leo, que desde donde este, guia mi camino con su luz. A mis amigos. LUIS GERARDO FORERO PARDO. iv.
(5) Agradecimientos. Los autores expresan sus agradecimientos a: El profesor Andrés Escobar Díaz por apoyarnos con su conocimiento y ser una guía invaluable en la ejecución de este proyecto. A YOKOGAWA Colombia S.A.S por abrir sus puertas de manera desinteresada, por permitirnos obtener información de primera mano y destinar tiempo y conocimiento a nuestro proyecto, principalmente a los profesionales que estuvieron involucrados como fueron, el Ingeniero Jhon Guillermo Bonilla Alturo (Gerente de Proyectos e ingeniería), al ingeniero Edward Javier Chaparro Soto (Área de Ingeniería y Servicios) y el ingeniero Francisco Cuevas (Área de Propuestas y ventas), sin ellos nos hubiera sido más complicado desarrollar nuestro proyecto. Y a todas aquellas personas que de una u otra manera han participado en el desarrollo de este proyecto.. v.
(6) Resumen. Este artículo se presenta el estudio y diseño de una plataforma de entrenamiento académico a partir del concepto de Sistemas de Control Distribuido (DCS). En su desarrollo se describen los variados componentes, características y parámetros que hacen parte del diseño de la plataforma. Para tal fin, se estudiaron diferentes fabricantes que distribuyen equipos para el desarrollo y la implementación de sistemas de control de procesos basados en tecnología DCS con presencia en la industria Colombiana. Tomando como base del estudio al fabricante YOKOGAWA, dicha decisión soportada en criterios técnicos, documentales y de asesoría personalizada. Para tener una visión más amplia de los sistemas y equipos denominados por el fabricante YOKOGAWA como de alta gama (STARDOM, PROSAFE-RS, PLC FAM3V y CENTUM VP), se estudia su función en los procesos productivos, características y las principales arquitecturas de automatización y control que el mismo fabricante desarrolla. Realizando el mayor énfasis en el Sistema de Control Distribuido, CENTUM VP, por ser el objetivo principal de este proyecto. Como resultado del estudio se consolida un diseño acorde con la normatividad en protecciones eléctricas, de equipos, de los usuarios de la plataforma entre otras normas o estándares, estudiados e implementados en el diseño final.. Palabras clave: Plataforma de entrenamiento, DCS, YOKOGAWA, STARDOM, Sistema Integrado de Seguridad, CENTUM VP. vi.
(7) Abstract. This paper describes the study and design of a platform of academic training comes from the concept of Distributed Control Systems (DCS). In its development the various components, features and parameters that are part of the design of the platform are described. For this purpose, various manufacturers that distribute equipment for the development and implementation of control systems based on DCS technology presence in the Colombian industry processes were studied. Based on the manufacturer YOKOGAWA study, it supported the decision on technical, documentary and personalized advice criteria. To get a broader view of systems and equipment referred to by the manufacturer as senior YOKOGAWA (STARDOM, PROSAFE-RS, PLC FA-M3V and CENTUM VP ), its role in the production process, the main features and automation architectures is studied and control the same manufacturer develops. Realizing the increased emphasis on distributed control system, CENTUM VP, as the main objective of this project. As a result of a design study is consolidated in accordance with the regulations on protection of electrical equipment, users of the platform among other regulations or standards, studied and implemented in the final design.. Keywords: Training Platform, DCS, YOKOGAWA, STARDOM, Integrated Security System, CENTUM VP,. vii.
(8) Índice general. Portada. II. Dedicatoria. IV. Agradecimientos. V. Resumen. VI. Abstract. VII. Lista de Figuras. XIII. Lista de Tablas. XV. Lista de Anexos. XVI. Glosario. XVII. Objetivos. 1. INTRODUCCIÓN. 2. 1 MARCO DE REFERENCIA 1.1 AUTOMATIZACIÓN 1.1.1 EVOLUCIÓN HISTORICA DE LOS SISTEMAS AUTOMATIZADOS Y DE CONTROL 1.2 MODELO CIM (COMPUTER INTEGRATED MANUFACTURING) 1.2.1 SISTEMA ERP (Enterprise Resource Planning) 1.2.2 Sistema MES (Manufactoring Execution Systems) 1.2.3 SCADA (Supervisory Control and Data Adquisition) 1.2.3.1 Tipos de datos de un sistema SCADA. 4 4. viii. 5 9 11 12 13 14.
(9) ix 1.2.4. 1.3 1.4. Sistema de Control 1.2.4.1 Controladores Analógicos Programables (PAC) 1.2.4.2 Sistema de Control Distribuido (DCS) 1.2.4.3 Unidad de Terminal Remota (RTU) 1.2.5 Nivel de Instrumentación Comparativa entre PLC Y DCS Comparativa entre SCADA Y DCS.. 15 16 17 24 24 25 27. 2 ESTUDIO FABRICANTE. 29 2.1 Arquitecturas de fabricantes de tecnología DCS 33 2.1.0.1 Sistema de Control Distribuido DCS OVATION y DELTA V de EMERSON 33 2.1.0.2 Sistema de Control Distribuido EXPERION de HONEYWELL 36 2.1.0.3 Sistema de Control Distribuido SIMATIC PCS7 de SIEMENS. 39 2.2 JUSTIFICACION DE LA ESCOGENCIA DEL FABRICANTE PARA EL ESTUDIO 42 2.2.1 CRITERIOS DE SELECCION PROVEEDORES DE SISTEMAS DE CONTROL DISTRIBUIDO EN COLOMBIA. 43 2.2.1.1 Conectividad 47 2.2.1.2 Software 47 2.2.1.3 Hardware 49 2.2.1.4 Desempeño 50 2.2.1.5 Disponibilidad de información 51 3 EQUIPOS YOKOGAWA 53 3.1 COMPONENTES DE ARQUITECTURAS DESARROLADAS POR YOKOGAWA 53 3.1.1 STARDOM (Network Based Control Systems) 53 3.1.1.1 Componentes que integran STARDOM 55 3.1.2 PROSAFE-RS Safety Instrumented Systems (SIS) 64 3.1.3 PLC FA-M3V 67 3.2 ARQUITECTURA DE INTERCONEXION DE CADA EQUIPO EN PLANTA 69 3.2.1 ARUITECTURA CON STARDOM. 70 3.2.2 ARQUITECTURA CON ProSafe-RS. 70 3.2.3 ARQUITECTURA CENTUM VP, STARDOM y PLC FAM3V. 71.
(10) x 3.2.4. Comparativa de los 4 equipos de alta gama de control de YOKOGAWA.. 4 SISTEMA DE CONTROL DISTRIBUIDO CENTUM VP YOKOGAWA 4.1 ¿Que es YOKOGAWA? 4.2 Sistema de Control Distribuido CENTUM VP de YOKOGAWA 4.3 CARACTERISTICAS DEL SISTEMA CENTUM VP 4.3.1 Estándares industriales 4.3.2 SISTEMA ESCALABLE E INTEGRABLE 4.4 ARQUITECTURA DEL SISTEMA CENTUM VP. 4.4.1 ESTACIONES DE TRABAJO HMI 4.4.2 ESTACION DE CONTROL DE CAMPO (FCS). 4.4.3 Comunicación 4.5 ESPECIFICACIONES TECNICAS CENTUM VP 4.5.1 Unidades de Control de Campo (FCU) Disponibles en CENTUM VP 4.5.1.1 Unidad de control de Campo AFV10S y AFV10D 4.5.1.2 Unidad de control de Campo AFV30S y AFV30D 4.5.1.3 Unidad de control de Campo AFV40S y AFV40D 4.6 Implementacion Sistema CENTUM VP en planta. 72. 74 74 75 77 77 78 78 80 81 82 83 84 84 85 86 87. 5 ELABORACIÓN DISEÑO, NORMATIVIDAD Y CARACTERISTICAS PLATAFORMA 89 5.1 Normatividad y Estandares aplicados en el diseño. 90 5.1.1 Normatividad y Estandares de equipos y componentes de la plataforma. 92 5.2 Caracterización o justificación de entradas/salidas de la plataforma. 97 5.3 Hardware Yokogawa incorporado en la plataforma 98 5.3.1 Unidad de control de campo (FCU). AFV10 D 99 5.3.2 Entradas y salidas análogas. AAI841 102 5.3.3 Entradas y salidas digitales. ADV581 104 5.3.4 Módulo de Comunicación FieldBus. ALF111 fuente de alimentación, acondicionador de señal, segmento de señal 105 5.3.5 Modulo de Comunicación Profibus-DP ALP121 107 5.3.6 Modulo de Comunicacion Ethernet ALE111 109 5.3.7 Terminal Blocks. 110 5.3.8 Terminal Boards 111 5.3.9 Software 112.
(11) xi 5.4. DISEÑO FINAL 5.4.1 REQUISITOS OBLIGATORIOS PARA GARANTIZAR LA SEGURIDAD EN LOS TABLEROS ELECTRICOS. 5.4.2 Partes que conforman la plataforma de entrenamiento 5.4.2.1 Bornas y Cableado. 5.4.2.2 Sistema de acondicionamiento de señales. 5.4.2.3 Etapa de potencia y protección eléctrica. 5.4.2.4 Pantalla Tactil 5.4.2.5 Switch 5.4.3 Elaboracion Diseño Final. 116 116 118 118 121 122 123 124 125. CONCLUSIONES. 128. Bibliografía. 130.
(12) Índice de figuras. 1.1 1.2 1.3 1.4 1.5 1.6 1.7. Proceso Automatizado (Los Autores) Modelo piramidal CIM.(Los Autores) Modulos que integran el sistema ERP.[7] Interfaz de un Sistema SCADA.(Los Autores) Vision sistema DCS/SCADA.[13] Los 7 pasos para mejoramiento de gestion de alarmas.[14] Instrumentación de medición. Los Autores. 4 10 12 15 19 21 25. 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8. Componentes Funcionales de un DCS.[20] Arquitectura basica de un DCS.[19] Caracteristica de disposicion vertical DCS DELTA V.[22] Arquitectura DCS DELTAV.[23] Controlador Honeywell C300 Y C200.(Los Autores). Arquitectura de plataforma EXPERION.[24] Controlador S7 400 sistema SIMATIC PCS7.[26] Arquitectura del sistema SIMATIC PCS 7.[27]. 30 33 35 36 37 39 40 42. 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13. Fuente y procesador STARDOM. Los Autores 54 Componentes de STARDOM. Los Autores 55 FCN (Nodo de Control de Campo) y demas componetes STARDOM.[29] 55 Dimensión y configuración modulo base FCN.(Los Autores) 57 Especificaciones y dimensiones CPU de la FCN.[30] 58 Equipo Unión de control de campo (FCJ).[31] 61 Especificaciones CPU y salidas Analogas del FCJ.[32] 61 Arquitectura supervisada por FAST TOOL.[33] 63 : Implementación VDS en entorno STARDOM.[34] 64 Equipo ProSafe-RS.(Los Autores) 65 PLC modular FA-M3V.[37] 68 Arquitectura de conexión con el equipo STARDOM.[39] 70 Arquitectura de conexión con el equipo ProSafe.[39] 71 xii.
(13) xiii 3.14 Arquitectura de tecnologia YOKOGAWA.[39]. 71. 4.1 4.2 4.3. Evolucion Sistemas de Control Distribuido de Yokogawa.[40] Configuración básica CENTUM VP.[40] Arquitectura de conexión con el equipo CENTUM VP.[41]. 74 80 88. 5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9 5.10 5.11 5.12 5.13 5.14 5.15 5.16 5.17 5.18 5.19 5.20 5.21 5.22 5.23 5.24 5.25 5.26. FCU AFV10 montaje Rack de 19 pulgadas. Los Autores Dimensiones AFV10S.[45] Módulo Análogo Yokogawa. Los Autores Modulo Digital Yokogawa. Los Autores Especificaciones Modulo Entradas Digitales ADV161.[46] Especificaciones Modulo Salidas Digitales ADV561.[46] Configuración de sistema Fundation Fieldbus.[47] Comunicación del proceso de flujo de datos de fieldbus.[47] Sistema de Configuracion ProfiBus- DP.[48] Comunicación del proceso de flujo de datos de ProfiBus.[48] Configuración módulo de comunicación Ethernet en Yokogawa.[49] Terminal Blocks y Módulo Yokogawa.[50] Dimensiones Terminal Board Yokogawa.[51] Especificaciones Funcion Standard Builder.[52] Especificaciones Test Funtions. [54] Pantalla Operacion y Monitorizacion HIS.[56] Riel Din. Los Autores Bornas de Conexion en Riel DIN.[57] Disposición de elementos en gabinete de control.[59] Terminales de Conexión. Los Autores Relés para control y bornes.[60] Protecciones Electricas. Los Autores Especificaciones Pantalla 15” Open HMI.[61] Caja Pelican. Los Autores Plataforma de Entrenamiento Equipos. Los Autores Plataforma de Entrenamiento Visualización. Los Autores. 101 101 102 104 105 105 106 107 108 109 110 111 112 113 114 115 118 119 120 121 122 123 124 125 126 126.
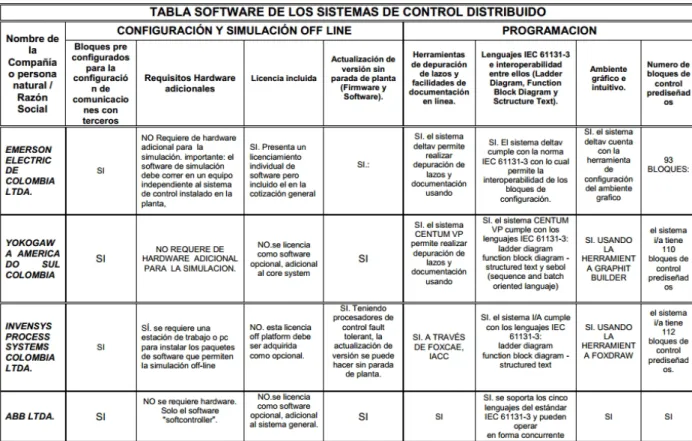
(14) Índice de cuadros. 2.1. Proveedores o fabricantes en Colombia de Sistemas de Control Distribuido. Los Autores 2.2 Información de contacto de los fabricantes. Los Autores 2.3 Casos de implementaciones en Colombia Proveedores DCS. Los Autores 2.4 Casos de implementaciones en Colombia Proveedores DCS. Los Autores 2.5 Conectividad en Sistemas de Control Distribuido. Los Autores 2.6 Software requerido para implementacion de un DCS. Los Autores 2.7 Software 2 requerido para implementacion de un DCS. Los Autores 2.8 Hardware en los Sistemas de Control Distribuido. Los Autores 2.9 Hardware 2 en los Sistemas de Control Distribuido. Los Autores 2.10 Desempeño de los Sistemas de Control Distribuido. Los Autores 3.1 3.2 3.3 3.4. 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8. 44 44 45 46 47 48 48 49 50 51. Tabla de Especificaciones de Alimentación FCN.[30] Lista de las Entradas/Salidas del controlador FCN.[30] Comparativa equipos principales del fabricante YOKOGAWA. Los Autores Comparativa 2 equipos principales del fabricante YOKOGAWA. Los Autores. 57 59. Características de las principales Buses de campo. Los Autores Especificaciones Electricas y Condiciones ambientales CENTUM VP. Los Autores Especificaciones FCU AFV10S. Los Autores Especificaciones FCU AFV10D. Los Autores Especificaciones FCU AFV30S. Los Autores Especificaciones FCU AFV30D. Los Autores Especificaciones FCU AFV40S. Los Autores Especificaciones FCU AFV40D. Los Autores. 82. xiv. 73 73. 83 84 84 85 85 86 87.
(15) xv 5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9. Requerimientos de Normatividad compoentes Sistema. Los Autores Normatividades en Buses de Campo Industrial. Los Autores Codigos de Especificaciones Unidad AFV10. Los Autores Especificaciones Modulo Análogo. Los Autores Modulos HART de Yokogawa. Los Autores Especificaciones Modulo Fundation Fieldbus. Los Autores Especificaciones Modulo ProfiBus-DP Yokogawa. Los Autores Especificaciones Módulo Ethernet Yokogawa. Los Autores Codigo de Colores para conductores Electricos.[58]. 94 95 100 103 103 106 108 110 120.
(16) Lista de Anexos. A Diseño Realizado con acompañamiento de YOKOGAWA. 137. B Diseño Final. 139. C Cotización equipos Yokogawa.. 141. D Evidencia de Contacto Otros Fabricantes.. 147. xvi.
(17) xvii GLOSARIO CFR: Código de Regulaciones Federales. cGMP: Buenas Prácticas de Fabricación. CSV: Valores separados por comas – exportación/Importacion de la base de datos y extensión del archivo. DCS: Sistema de Control Distribuido ENG: Estación de trabajo de ingeniería Yokogawa. ERP: Planificación de Recursos Empresariales. FCS: Estación de Control de campo. FDA: Administración de Alimentos y Medicamentos. FIO: Entradas y Salidas de campo en la FCS. GSGW: Estación de Enlace de Subsistemas Genéricos de CENTUM VP para integrar sistemas compatibles con OPC. HIS: Estación Interfaz Humana utilizada por el usuario del sistema para realizar las operaciones del sistema y/o generación de informes y la impresión en función de los permisos de acceso de usuario. HMI: Interfaz Hombre-Máquina. I/O: Entrada/Salida. También se puede encontrar como E/S. LIMS: Sistema de Gestión de Información de Laboratorio. MES: Sistema de Ejecución de Fabricación. ODBC: Conectividad abierta de bases de datos. OPC: Método de intercambio de datos entre sistema de producción basado en las normas de la OPC Fundations..
(18) xviii PIMS: Sistema de Gestión de la información de planta. PRM: Gestión de Recursos de Planta, Paquete de Gestión de Activos de Yokogawa. RDB: Base de datos relacional. RÍO: Hardware de Yokogawa para conectar entradas y salidas remotas. SEBOL: Secuencia y lenguaje orientado a proceso por lotes, un lenguaje de programación diseñado para el control de procesos por Yokogawa. SFC: Diagrama de funciones secuenciales. SLC: Ciclo de vida de los sistemas. SOP: Los procedimientos de operación estándar. Vnet/IP: Red de comunicación industrial bajo protocolo propietario de Yokogawa..
(19) 1. Objetivos Objetivos Generales: Estudiar y diseñar una plataforma de entrenamiento de alto nivel en control electrónico a partir de Sistema de Control Distribuido (DCS).. Objetivos Específicos: Determinar la opción de mercado que cumpla con los parámetros propuestos para el estudio y diseño de una plataforma de entrenamiento de alto nivel a partir de DCS. Estudiar las principales arquitecturas de automatización del fabricante seleccionado. Generar un diseño a partir del estudio desarrollado de las arquitecturas automatización. Generar una propuesta documentada donde se condense el estudio y diseño para una plataforma de entrenamiento de alto nivel en control electrónico a partir de DCS..
(20) INTRODUCCIÓN. La implementación de plataformas de entrenamiento o laboratorios con equipo e instrumentación utilizada en procesos productivos industriales, no ha tenido la importancia para la vinculación de esta temática en los programas o currículos académicos afines a electrónica, mecatrónica, control y automatización, debido a variados factores entre los cuales se encuentra la falta de articulación tecnológica y de conocimiento entre academia e industria y al avance constante de la automatización industrial, donde la academia no tiene el mismo ritmo de actualización que se aplica a nivel industrial. Esta propuesta es una iniciativa que surge al interior del grupo de investigación Orden y Caos (ORCA) a través del docente Andrés Escobar Díaz, en búsqueda de suplir la necesidad que el proyecto curricular de ingenieria en control presenta en temáticas y equipos de laboratorio para prácticas de Sistemas de Control Distribuido (DCS) en la Universidad Distrital Francisco José de Caldas Facultad Tecnológica. Un Sistema de Control Distribuido (DCS por sus siglas en ingles) consiste en el enlace, por medio de una red de comunicaciones, de diversos nodos distribuidos físicamente, dotados de capacidad de proceso y enlazados a sensores y/o actuadores. Estos sistemas se caracterizan por que el proceso de control tiene lugar en estos nodos de manera coordinada. Las redes de comunicaciones orientadas al enlace de estos nodos son conocidas también como buses de comunicaciones o redes multiplexadas. Un nodo es un procesador autónomo con su propio hardware: procesador (CPU), memoria, oscilador de reloj, interfaz de comunicaciones, e interfaz hacia el subsistema que controla La modularidad y amplia gama de instrumentación disponible en el mercado de la automatización permiten que estos sistemas sean escalables desde una pequeña aplicación, hasta complejos sistemas de alta disponibilidad. Los principales fabricantes de DCSs son: EMERSON con DELTA V y OVATION, YOKOGAWA con el CENTUM VP, INVENSYS con FOXBORO I/A, HONEYWELL con EXPERION y ABB con 800 XA, aclarando que existen otros fabricantes en el mercado 2.
(21) 3 de la automatización que ofrecen Sistemas de Control Distribuido pero por caracteristicas tecnicas no corresponden a un DCS. A nivel mundial se documenta implementaciones DCS en la academia, solo por mencionar un ejemplo puntual, en la Universidad de la Escuela de Ingeniería Química y Biomolecular de Sídney ha implementado una planta que investiga cómo procesar materiales no biodegradables, todo el sistema está fundamentado, supervisado y controlado bajo las arquitecturas de automatización y equipos provistos por la multinacional de tecnología YOKOGAWA. En Latinoamérica el país que representa mayor incursión en la integración de la academia con la industria de la automatización con DCS es Brasil a través de sus universidades públicas permitiendo un crecimiento de profesionales altamente capacitados. En el contexto nacional en el ámbito académico se ha documentado implementaciones que evidencian la tendencia hacia procesos con sistemas de control distribuido, ejemplo de ello es el Servicio Nacional de Aprendizaje (SENA) que en las instalaciones de la regional Cali y Bogotá ha desarrollado laboratorios para el entrenamiento de sus estudiantes en este campo. También se han elaborado revisiones del estado actual de la ingeniería de control donde se analiza el campo de los sistemas control desde una perspectiva tecnológica, mostrando los éxitos y el impacto que ha tenido en las últimas décadas esta área del conocimiento en la sociedad moderna, analizando los diferentes sistemas de control industrial, DCS, Supervisión, Control y Adquisición de Datos (SCADA por sus siglas ) y Sistemas Instrumentados de Seguridad (SIS) mostrando las oportunidades y retos tanto actuales como futuros a los que se debe enfrentar este campo de la ingeniería sin olvidar los aspectos claves en el área de la enseñanza de la ingeniería de control.[1].
(22) Capítulo 1 MARCO DE REFERENCIA. 1.1.. AUTOMATIZACIÓN. La palabra automatización (del griego autos que significa “por sí mismo” y maiomai que significa “lanzar”), consiste en la técnica de hacer que un sistema opere automáticamente de forma rápida y eficaz, minimizando la intervención humana empleando medios artificiales, permitiendo que el proceso transcurra de forma continua y automática.[2] Lo que conlleva, a que la producción adquiera un aspecto de ciclo que puede programarse y reestructurarse en un sistema artificial que se ha denominado autómata, el cual se rige por un programa de forma propia o automática. Basado en el programa, el sistema debe tomar decisiones de acuerdo a las entradas y el estado de las variables, para de esta forma cumplir con las tareas o propósitos que le fueron asignados.. Figure 1.1: Proceso Automatizado (Los Autores). 4.
(23) 5 En la incorporación de sistemas automatizados los encargados de su implementación y sobre todo los interesados en la adquisición de un proceso automatizado de producción, se fijan objetivos siendo los más importantes. Objetivos de la Automatización. Con el crecimiento de las áreas de producción y la necesidad de optimizar los procesos industriales en cualquier área lo que se busca es: Mejorar la velocidad de producción y la disponibilidad de productos, en un menor tiempo posible mediante un mejor control de la producción. Mejorar la calidad de la fiabilidad de la producción mediante procesos repetitivos. Aumentar la seguridad para el personal. Ahorrar el requerimiento de espacio en la planta.[3]. 1.1.1.. EVOLUCIÓN HISTORICA DE LOS SISTEMAS AUTOMATIZADOS Y DE CONTROL. La instalación de Sistemas de Control, permite resolver con éxito los inconvenientes del control manual de los procesos industriales. Dicho desarrollo se ha logrado a través del auge de las tecnologías digitales como sustitutos de las tecnologías analógicas tradicionales. El control de procesos ha evolucionado paralelamente con la telemetría, entendida como la forma de comunicación entre los instrumentos que conforman el lazo de control. Se pueden definir tres fases del desarrollo: control neumático, control electrónico y control basado en microprocesadores. El control automático de procesos se inicia alrededor de los años 40, con dispositivos neumáticos analógicos que reciben y envían señales de presión de aire, inicialmente instalando todos los dispositivos dentro de la planta (controladores locales). Posteriormente todos los controladores de un proceso fueron colocados en un mismo cuarto (el cuarto de control central) como resultado de la creciente complejidad de los lazos de control. Sin embargo, se necesitaban dos líneas de.
(24) 6 señales neumáticas por cada lazo de control, una del controlador al sensor y la otra del controlador al actuador, y en plantas de grandes dimensiones estas líneas tenían cientos e incluso miles de pies de largo. Lo anterior se traduce en un elevado costo y un retraso en la transmisión. Ante la problemática planteada por la instrumentación neumática se desarrollaron dispositivos electrónicos basados en tubos de vacío, los que no tuvieron un alto grado de aceptación. Sin embargo, las necesidades surgidas a raíz de la Segunda Guerra Mundial condujeron al descubrimiento del transistor en 1947, que vino a sustituir a los tubos de vacío en los equipos electrónicos. Para la década de los 60 la instrumentación electrónica había alcanzado un grado de desarrollo tal que podía sustituir a la neumática. Aunque la instrumentación neumática siguió y sigue usándose, los componentes electrónicos fueron gradualmente reemplazándola. Durante los años 70, se produjo un vuelco casi total hacia el control de tipo electrónico. Los dispositivos de instrumentación electrónicos analógicos poseen entradas y salidas generalmente en la escala de 4 a 20 mA, aunque también se utilizan escalas de 10 a 50 mA, 0 a 5 V y 0 a 10 V. El uso mixto de tecnologías analógicas neumáticas y electrónicas trajo consigo el desarrollo de los transductores electroneumáticos (I/P), dispositivos que convierten una señal en la escala de 4 a 20 mA a una señal en la escala de 3 a 15 psi y los transductores (P/I) que efectúan la conversión de señales inversa. Los instrumentos electrónicos eliminaron el problema del retraso de transmisión, pero los costos de las líneas de transmisión siguieron siendo significativos. Asimismo, las señales electrónicas analógicas son muy susceptibles al ruido.[4] El siguiente paso en la evolución del control de procesos ha sido el reemplazo de la instrumentación electrónica analógica por la electrónica digital; esta transición ha obedecido a factores tales como flexibilidad (los sistemas analógicos, a diferencia de los digitales, son difíciles de reconfigurar), versatilidad, costo y la posibilidad de eliminar el ruido casi por completo en las señales digitales. Sin duda, el acelerado desarrollo experimentado por la tecnología de los sistemas digitales ha tenido un papel preponderante en lo sucedido. La primera aplicación de la computadora digital en el control de procesos se dio en 1958 en la refinería Texaco de Port Arthur en Texas. Uno de los primeros métodos empleados para el control de procesos a través de computadoras digitales fue el denominado Control Digital Directo (DDC) que consiste en el reemplazo de los controladores analógicos por una voluminosa computadora..
(25) 7 Estos sistemas no pudieron competir con el controlador analógico como resultado de su alto costo. Adicionalmente, si el controlador fallaba el proceso estaba fuera de control, una solución era colocar una computadora redundante (suplente) que tomaba el control del proceso cuando la computadora principal fallaba, pero esto incrementaba aún más los costos. Otro método usaba controladores analógicos conectados con la computadora principal y dio origen a lo que se conoce como control supervisor o control de puntos de consigna (SPC, Set Point Control), en este caso la computadora se limita a un rol meramente supervisor (el control y calculo de los “set point” y su envío a los controladores). Las computadoras de control de procesos se convirtieron en minicomputadoras a mediados de los 60, lo que hizo que los costos se redujesen aunque no lo suficiente para desplazar a los sistemas analógicos. Fue hasta mediados de los años 70 que el hardware de control digital se consolido definitivamente en el mercado, como resultado de la introducción del microprocesador, lo que permitió a la tecnología digital competir en costos con la tecnología analógica. Ello dio lugar al nacimiento del sistema de control distribuido (DCS) que es un sistema de control basado en microprocesadores programables y que tiene la capacidad de comunicar varios controladores entre sí a través de una red. A diferencia del DDC que es un sistema altamente centralizado, el DCS, como su nombre lo indica, distribuye las tareas de control entre un grupo de microprocesadores en diferentes ubicaciones dentro de la planta y que se encuentran interconectados a través de una red de comunicación industrial, lo que explica su utilización en industrias como refinerías, cervecerías y plantas de potencia, que involucran entre cincuenta y cien o, incluso más, lazos de control. No es fácil establecer una estructura estándar de los DCS, dado que existen alrededor de 50 sistemas diferentes disponibles en el mercado y cada uno tiene una arquitectura propia, aunque todos son sistemas jerárquicos constituidos por varios niveles. Una arquitectura común, consiste en establecer 5 niveles.[4] En el nivel 1 o nivel de lazo se ubican los componentes que están en contacto con el proceso: 1. Módulos de control (CM), que están constituidos por controladores digitales básicos, capaces de realizar controles PID y otros algoritmos de control basados en sumas, multiplicaciones, divisiones, relaciones, raíces cuadradas, contadores, etc.; y controladores digitales multifunciones que pueden desempeñar estrategias de control avanzadas. 2. Módulos de adquisición de datos (DM), que se utilizan principalmente para.
(26) 8 recopilar grandes cantidades de datos del proceso. 3. Controladores lógicos programables (PLC), que se emplean para paradas de emergencia y procesos discretos o por lotes y semi lotes. En el nivel 2 se colocan las estaciones o consolas del operador, que son las interfaces hombre-máquina fundamentales del DCS y que se localizan físicamente cerca del proceso. Las estaciones del operador son capaces de proporcionar una vista amplia del proceso, pero con la habilidad adicional de enfocarse en un área específica que necesite atención. La consola consiste generalmente de una computadora con pantalla, teclado y ratón. Desde la estación pueden efectuarse funciones como introducción de instrucciones hacia los controladores (cambios de modo, “set point”, salida del controlador), solicitud de información de dispositivos y despliegue de estado de alarmas y de reportes de operación. El nivel 3 consiste de una computadora central o anfitrión (host) que se utiliza para supervisar varias áreas de proceso. Entre las funciones que ejecuta pueden mencionarse: paradas y arranques automáticos, optimización, simulación de procesos e informes de tendencias de largo plazo. Aquí se produce la primera concentración masiva de información. En este nivel se sitúa lo que algunos han denominado la “interfaz de ingenieria”, es por ello que a las estaciones de operador de este nivel se les denomina “estaciones de ingeniería”. Las estaciones de este nivel tienen derechos administrativos sobre el DCS y pueden utilizarse para tareas como la instalación del sistema, el diseño de lazos de control y el diseño de estrategias de control mejoradas. En el nivel 4 se pueden desempeñar tareas de programación de mantenimiento, control de la producción, grabación y adquisición de datos históricos de largo plazo, simulación y optimización. El nivel 5 es un centro neurálgico (hub) y se aplica en compañías que coordinan las operaciones de varias plantas distribuidas sobre un área geográfica grande. Se ubica en la planta central de la organización y la comunicación con las otras plantas se realiza a través de línea telefónica o cableado directo. La comunicación entre los distintos niveles de un DCS y entre elementos de un mismo nivel se efectúa a través de una línea principal de información, ducto rápido de comunicaciones o ruta de datos (data highway). Existen diferentes configuraciones de rutas de datos. Los circuitos de transmisión con múltiples terminales (multi-drop) fueron los primeros en utilizarse. Son los más simples y de menor costo, pero no poseen la flexibilidad de otras configuraciones. La más flexible es.
(27) 9 la configuración en racimos o parcialmente en racimos de múltiples terminales. Este tipo de configuración minimiza la probabilidad de atascos de datos, pero es la más costosa y voluminosa. La configuración en anillo es la que tiene la mayor capacidad de resistir errores de software y problemas de hardware, pero es la más compleja de operar. Por el contrario, la configuración en estrella es la de menor capacidad para resistir errores de software y problemas de hardware y tiene un costo elevado, por la cantidad de cableado requerido. Un desarrollo reciente consiste en el empleo de redes de área local (LAN) de alta seguridad. Hay dos tipos principales de LAN que tienen aplicación en los DCS: las LAN de alto desempeño que utilizan cable coaxial como medio de transmisión de datos y son capaces de transmitir a distancias de más de 3 kilómetros y las LAN de bajo costo que usan pares de alambres entrelazados y protegidos y pueden transmitir datos en distancias de alrededor de 300 metros. Entre las LAN que se usan en los DCS se puede citar Ethernet TCP/IP. Toda ruta de datos posee un protocolo. El protocolo consiste en un conjunto de reglas que gobiernan la transferencia de información en la línea y es manejado por comandos de software desde la estación de ingeniería. Los protocolos de las rutas de datos son protocolos propietarios, es decir, dependen del fabricante del DCS.[4]. 1.2.. MODELO CIM (COMPUTER INTEGRATED MANUFACTURING). La Fabricación Integrada por Computador (CIM por sus siglas en ingles) se define como el uso de la tecnología por medio de las computadoras para integrar las actividades de una empresa. En los sistemas de automatización y datos se deriva la necesidad de integrar los procesos de producción (diseño, ingeniería y fabricación) con los de gestión de la empresa, por tanto se obtiene así la denominada fabricación integrada por computador, también conocida como CIM. Este tipo de modelo se aplica en las empresas que tratan de integrar, en mayor o menor medida, y mediante el uso adecuado de computadores, todas las áreas de la empresa, permitiendo realizar:[4] Órdenes de entrada Control de inventarios.
(28) 10 Planificación de necesidades de materiales Diseño del producto y proceso Simulación Planificación de la fabricación Automatización de la producción Control de calidad Ensamblado automático Control de ventas El modelo CIM se encuentra presente en el desarrollo de un producto en todas sus fases desde la producción hasta la comercialización; el modelo está constituido por una estructura piramidal, conformado por niveles que pueden variar según las adaptaciones que se realicen. El modelo CIM que se presenta en la figura 1.2, fue propuesto por NIST (National Institute of Standards and Technology), que posee una estructura transparente de planeación y control, los niveles que conforman este modelo son: Nivel de Sistema ERP (Enterprise Resource Planning), Nivel de Sistema MES (Manufacturing Execution System), Nivel Sistema SCADA (Supervisory Control And Data Acquisition), Nivel de Sistema de Control y proceso o instrumentación.[6]. Figura 1.2: Modelo piramidal CIM.(Los Autores).
(29) 11 1.2.1.. SISTEMA ERP (Enterprise Resource Planning). La planeación de recursos empresariales (ERP por sus siglas en ingles) es el nivel más alto del modelo CIM. Es un sistema que gestiona la información, automatiza e integra las tareas de negocio, operación y producción de una empresa. Busca realizar un manejo eficiente de la información, facilitar el intercambio de datos entre todos los departamentos de la organización y pronosticar la oferta y demanda de los productos y/o servicios, para brindar soluciones prácticas y rápidas a los usuarios, reducir tiempo y costos de procesos, al igual que acceder a información precisa y confiable.[6] Los ERP brindan las herramientas para mejorar el control, la planeación de recursos y facilitar la toma de decisiones en el momento oportuno. Una planificación de Recursos empresariales se destaca por estas tres características: Integral: Fusiona y sincroniza las operaciones de las diferentes dependencias de una empresa como, recursos humanos, manufactura, finanzas, producción y distribución y logra la conexión entre la comunidad empresarial con sus clientes y proveedores con la consigna de una alta dependencia entre ellos. Modular: Se divide en módulos que son desarrollados de forma individual, pero al mismo tiempo son dependientes e intercambian información entre sí, a lo largo y ancho de la empresa para formar el ERP. Los módulos cambian de acuerdo a las características de la empresa, siendo primordial el enfoque en el que esta se situe, bien sea en el área de la producción, distribución o prestación de servicios. Adaptable: Presenta una alta flexibilidad a la organización y estructura de la compañía, se adapta de acuerdo a la configuración de los procesos. En la figura 1.3 se observa la interacción de los módulos de una empresa con los proveedores y los clientes..
(30) 12. Figura 1.3: Modulos que integran el sistema ERP.[7]. 1.2.2.. Sistema MES (Manufactoring Execution Systems). Los sistemas de ejecución de manufactura (MES por sus siglas en ingles), son esencialmente sistemas informáticos en línea que brindan herramientas para lograr ejecutar las distintas actividades de la administración de la producción. Este nivel de la pirámide CIM es necesario para sincronizar la ejecución de las operaciones dentro de la industrial donde ha sido implementado, logrando la recopilación de información y el respectivo reporte de datos, el cual debe ser un procedimiento de constante cambio o actualización de los datos. El sistema MES cuando comienza su funcionamiento, lo primero que realiza es disponer de manera visual la información de las actividades que están sucediendo en planta para de esta forma permitir la gestión de las operaciones. Los Sistema MES presentan 11 elementos básicos de funcionamiento los cuales son: 1. Adquisición y recolección de datos. 2. Análisis de rendimiento. 3. Gestión de procesos. 4. Control de documentación. 5. Gestión de mantenimiento. 6. Gestión de unidades de producción. 7. Gestión de mano de obra..
(31) 13 8. Gestión de calidad. 9. Trazabilidad de productos. 10. Estado y asignación de recursos. 11. Planeacion de las operaciones en detalle. Lo que se consigue con una adecuada implementación del nivel MES, es la obtención de una producción más eficiente, mayor calidad en producto, respuestas más rápidas lo que genera incremento en el rendimiento operacional del proceso.. 1.2.3.. SCADA (Supervisory Control and Data Adquisition). SCADA es un sistema industrial de mediciones y control que consiste en una computadora principal o “Master” (generalmente llamada Estación Maestra, “Master Terminal Unit” o MTU); en conjunto con disposición de una o más unidades control obteniendo datos de campo (generalmente llamadas estaciones remotas, “Remote Terminal Units,” o RTU); y una colección de software estándar a la medida usado para monitorear y controlar remotamente dispositivos de campo. Los sistemas SCADA contemporáneos exhiben predominantemente características de control a lazo abierto y utilizan comunicaciones generalmente interurbanas, aunque algunos elementos de control a lazo cerrado y/o de comunicaciones de corta distancia pueden también estar presentes.[8] Sistemas similares a un sistema SCADA son vistos rutinariamente en fábricas, plantas de tratamiento, etc. Éstos son llamados a menudo como Sistemas de Control Distribuidos (DCS –“Distributed Control Systems”.) Tienen funciones similares a los sistemas SCADA, pero las unidades de recolección o de control de datos de campo se establecen generalmente dentro de un área confinada. Las comunicaciones pueden ser vía una red de área local (LAN), presentando una alta confiabilidad y alta velocidad de transmisión de datos. Un sistema DCS emplea generalmente cantidades significativas de control a lazo cerrado. Esquemáticamente, un sistema SCADA conectado a un proceso automatizado consta de las siguientes partes: 1. Proceso Objeto del control: Es el proceso que se desea supervisar. En consecuencia, es el origen de los datos que se requiere colectar y distribuir..
(32) 14 2. Adquisición de Datos: Son un conjunto de instrumentos de medición dotados de alguna interfaz de comunicación que permita su interconexión. 3. SCADA: Combinación de hardware y software que permita la colección y visualización de los datos proporcionados por los instrumentos. 4. Clientes: Conjunto de aplicaciones que utilizan los datos obtenidos por el sistema SCADA. Por otra parte, un sistema SCADA generalmente cubre áreas geográficas más grandes, y normalmente depende de una variedad de sistemas de comunicación menos confiables que una LAN. El control a lazo cerrado en esta situación será menos deseable. El control puede ser automático, o iniciado por comandos de operador. La adquisición de datos es lograda en primer lugar por las RTU que exploran las entradas de información de campo conectadas con ellos (pueden también ser usados PLC – “Programmable Logic Controllers”).. 1.2.3.1.. Tipos de datos de un sistema SCADA Los datos que se aprecian en un SCADA pueden ser de tres tipos princi-. pales: Datos analógicos (por ejemplo números reales) que quizás sean presentados en gráficos. Datos digitales (on/off) que pueden tener alarmas asociadas a un estado o al otro. Datos de pulsos (por ejemplo conteo de revoluciones de un medidor) que serán normalmente contabilizados o acumulados. La interfaz que interactúa con el operador es una pantalla que dispone de una representación de la planta con la instrumentación e equipamiento, todo de forma gráfica, un ejemplo de ello (Ver figura 1.4). Los datos vivos (dispositivos) se muestran como dibujos o esquemas en primer plano sobre un fondo estático que en lo posible es una representación del proceso que se controla o supervisa..
(33) 15. Figura 1.4: Interfaz de un Sistema SCADA.(Los Autores). 1.2.4.. Sistema de Control. En este nivel se encuentran los Controladores Lógicos Programables (PLC), Unidades Terminales Remotas (RTU´s), Controladores Industriales, Sistemas de Control Distribuido (DCS), Controladores Analogicos Programables (PAC) y demás dispositivos electrónicos de control. En suma, constituyen los elementos de mando y control de la maquinaria del nivel de proceso e instrumentación. Este nivel recibe y proporciona la información de actuación directa al nivel de proceso e instrumentación, y recibe y proporciona la información de estado al nivel sistema SCADA. Entre las funciones específicas de mayor relevancia de este nivel que se tiene es para capturar y digitalizar las señales estándares provenientes del nivel de proceso e instrumentación, convertir en señales estándares de instrumentación, mantener comunicación permanente con el nivel sistema SCADA, desde donde puede ser monitoreado y programada cada una de sus acciones, garantizar la seguridad y el control del Proceso entre otras.[9] Tendencias de los Sistemas de Control. El futuro sistemas de control están proyectados en: Reducción de cableado y de elementos componentes(hardware) por medio de un único estándar de bus de campo o un conjunto de buses de campo, orientados a diferentes grados de complejidad del dispositivo, según el nivel de funcionalidad soportado y a su vez manteniendo una compatibilidad en sentido ascendente, lo que posibilita la escalabilidad del sistema..
(34) 16 Crecimiento investigativo hacia sistemas abiertos, permitiendo la intercambiabilidad de elementos: estaciones de supervisión, dispositivos de control, sensores y actuadores y red de comunicaciones. Selección de la topología y el protocolo de red para integrar procesadores y dispositivos de entrada/salida. Facilidad de incorporación de nuevos módulos o dispositivos a los procesos con sistema de control. El objetivo es similar a las capacidades plug & play popularizadas en el ámbito de los PCs: se trata de permitir la fácil y rápida expansión del sistema mediante la adición de módulos de software o hardware, con capacidad para reconocer y configurar los dispositivos y aplicaciones en el momento de su instalación en el sistema. Sistemas escalables, que junto a la utilización de sistemas abiertos garantiza la máxima protección de la inversión. En cada momento, de acuerdo con las necesidades presentes, se utilizan los elementos con la capacidad y potencia requeridos para las funciones de control y supervisión.. 1.2.4.1.. Controladores Analógicos Programables (PAC). La tecnología PAC (Programmable Analogical Controller) es un nuevo concepto de equipo de control avanzado en el que se ejecutan diferentes funciones en tiempo real, interrelacionando varias variables de proceso a la vez, hasta generar uno o varios resultados a pie de proceso, evitando que las diferentes líneas de señal deban viajar hasta los PLC, donde habitualmente venían realizándose los cálculos PID (Algoritmo de control Proporcional, integral y derivativo). Los dispositivos analógicos programables son unos componentes que surgieron de la necesidad de agilizar el proceso de diseño y verificación de circuitos analógicos. Su estructura es similar a la de los dispositivos lógicos programables y contienen una serie de células analógicas básicas que, programadas en forma adecuada, permiten realizar de forma compacta diseños de complejidad baja/media.[10] El controlador PLC supervisa las actividades de los PAC transmitiendo y recogiendo los datos vía comunicación, pero dejando la mayor parte de las tareas a los PAC..
(35) 17 Los instrumentos PAC serían equivalentes a las propias tarjetas de E/S pasivas de los PLC, pero con la ventaja de ser independientes, inteligentes y poderse ubicar a pie de proceso o base de la pirámide de automatización.[10]. 1.2.4.2.. Sistema de Control Distribuido (DCS). El sistema de control distribuido (Distributed Control System, DCS por sus siglas en ingles), es un sistema moderno que puede controlar diferentes procesos en paralelo, con un controlador central que funciona como el cerebro, unidades terminales remotas (Remote Terminal Unity, RTU), entre otros elementos de control que permiten tomar la información, procesarla y actuar sin importar si los sensores y actuadores no se encuentran cerca del controlador. Esto puede variar dependiendo la arquitectura que se desee implementar.[11] Para un sistema automático industrial existen diferentes elementos que diferencian una arquitectura de otra. Si se utiliza como base la uniformidad del equipamiento, las arquitecturas pueden ser divididas en heterogéneas y homogéneas. Las homogéneas usan elementos de un mismo tipo y un mismo fabricante, garantizando al máximo la compatibilidad a nivel de interconexión entre ellos, pero si este no abarca una función específica no es posible implementarse. Entonces la solución que más se apega al concepto de total integración, es el de maximizar el empleo de la tecnología de un fabricante y sólo recurrir a otros para funciones puntuales.[12] Por otra parte, si se utiliza como elemento diferenciador la morfología de las conexiones se agrupan en: Centralizada. En este existe un único elemento donde radica la lógica de control, y a él se conectan directamente todas las señales de entrada y salida del proceso. Descentralizada. En estas las diferentes señales están conectadas a módulos de entrada salida que no se encuentran físicamente unidos al equipo de control. Esta solución es transparente al programa ya que las señales se direccionan como si fueran centralizadas. Híbrida. Como su nombre lo indica es una mezcla de una aquitectura centralizada y decentralizada..
(36) 18 Distribuida. Al ser la arquitectura en la cual se basa este proyecto se mencionan las características más importantes de esta que son: 1. Distribución de funciones. Existen diversos procesadores, cada uno de ellos especializado en una misión concreta, por ejemplo: control, interfaz, visualización, históricos, etc. Este es el concepto básico de esta arquitectura. 2. Rapidez de ejecución de las funciones. Es una consecuencia del concepto antes expuesto y es necesaria para que el sistema actúe con periodos de segundos o fracciones de segundos. 3. Distribución física de equipos. Brinda la posibilidad de ubicar cerca de los sensores las interfaces de entrada/salida, con el consiguiente ahorro de cableado. Permiten alcanzar unos niveles de automatización más jerarquizados y mejor estructurados. 4. Gran flexibilidad de configuración y programación. Lo que facilita su mantenimiento, su reutilización y su ampliación. Con estas caracteristicas expuestas en los DCS, se logra en la producción en planta la obtención de información del proceso en tiempo real permitiendo al usuario el manejo de las variables y la visualización del estado del sistema, obteniendo así una interfaz humano-máquina, que puede ser implementada a través de pantallas táctiles, equipos de cómputo, alarmas entre otros. Los datos que se obtienen en el sistema de control se pueden transmitir de manera fácil, rápida y cómoda para el usuario a otros niveles de la pirámide de automatización totalmente integrada como el de gestión. Estos son enviados a través de una red industrial (Ethernet, Profinet, FieldBus entre otros medios de comunicación) contando con privacidad y seguridad. La información del sistema es almacenada para visualizar históricos de una variable o del proceso en general. Actualmente los sistemas de control distribuido son implementados en plantas de producción donde se realiza automatización de procesos con un mismo sistema al tiempo, optimizando los recursos y mejorando la calidad de los resultados, este tipo de sistemas permiten tener la información detallada de cada proceso que se esté desarrollando.[13].
(37) 19. Figura 1.5: Vision sistema DCS/SCADA.[13]. Funciones básicas de un DCS Las funciones básicas del sistema DCS son los siguientes: 1. La adquisición de datos y funciones de control. 2. Las funciones de visualización en pantalla: Por medio de un dispositivo o sistema que permite el interfaz entre la persona y la máquina, conocida como HMI (Human Machine Interface). Tradicionalmente estos sistemas consisten en paneles compuestos por indicadores y comandos, tales como luces pilotos, indicadores digitales y análogos, registradores, pulsadores, selectores y otros que se interconectaban con la máquina o proceso. En la actualidad, dado que las máquinas y procesos en general están implementadas con controladores y otros dispositivos electrónicos que dejan disponibles puertas de comunicación, es posible contar con sistemas de HMI más poderosos y eficaces, además de permitir una conexión más sencilla y económica con el proceso o máquinas. En lo referente a pantallas HMI se disponen de los siguientes tipos. Terminal de Operador, consistente en un dispositivo, generalmente construido para ser instalado en ambientes agresivos, donde pueden ser solamente de despliegues numéricos, o alfanuméricos o gráficos. Pueden ser además con pantalla sensible al tacto (touch screen). PC + Software, esto constituye otra alternativa basada en un PC en donde se carga un software apropiado para la aplicación. Como PC se puede.
(38) 20 utilizar cualquiera según lo exija el proyecto, en donde existen los llamados Industriales (para ambientes agresivos), los de panel (Panel PC) que se instalan en gabinetes dando una apariencia de terminal de operador. 3. Las funciones de vigilancia de variadas alarmas: Los DCSs, por sus características, permiten a Ingenieros, Operadores, Técnicos e Instrumentistas crear alarmas y eventos de forma sencilla, lo cual es una ventaja. Aunque puede convertirse en un inconveniente si se abusa de ello y/o no se configuran de forma adecuada, llegando al punto de poder afectar a la operación de la planta por un exceso de flujo de alarmas o una mala gestión de las mismas. Durante la implementación de los primeros DCSs no existían pautas o guías consistentes para la creación de alarmas, y tanto en las plantas donde sustituían a los antiguos Sistemas de Control, como en las nuevas plantas que ya los incorporaban, el resultado era una masiva configuración de alarmas. Tras reconocer que la Gestión de Alarmas se había convertido en un problema, los usuarios de Sistemas de Control Industriales se unieron y formaron en 1990 la Alarm Management Task Force, que era una junta de asesoramiento dirigida por Honeywell, y en la que participaban miembros de las industrias química, petroquímica y de operaciones de refinado. La AMTF (Alarm Management Task Force) redacto documentación sobre temas relacionados con la GdA (Gestión de Alarmas), pero pronto se dieron cuenta de que los problemas con las alarmas eran simplemente un subapartado de un problema más grande, y crearon el Abnormal Situation Management Consortium. El ASM (Abnormal Situation Management Consortium) hizo una propuesta de investigación y recibió fondos del National Institute of Standards and Technology de los Estados Unidos en 1994. El objetivo de este trabajo iba dirigido a la compleja relación hombre-sistema, y a los factores que influyen en el buen desempeño de la operación por parte de los Operadores. A menudo la automatización de procesos se desarrolla sin tener en cuenta las necesidades de las personas que van a interaccionar con ellos, por ejemplo, las alarmas se han de proyectar para mejorar el conocimiento del estado de la planta por parte de los Operadores de Sala de Control, pero un sistema mal diseñado o pobremente definido no conseguirá este objetivo. En el 2003, la International Society of Automation reunió un grupo de trabajo para preparar recomendaciones prácticas o estándares para Sistemas de Alarmas de procesos industriales. Este trabajo se apoyó en las recomendaciones de la EEMUA 191, e intento proporcionar una explicación clara a muchas de las prácticas incluidas en ella, añadiendo además aclaraciones.
(39) 21 en aquellas áreas poco precisas. El resultado fue la ISA 18.2 “Management of Alarm Systems for the Process Industries”, publicada en el 2009. La ISA 18.2 se basa en las recomendaciones de la EMMUA 191 para dirigir el diseño, desarrollo, instalación y gestión de los Sistemas de Alarmas en las industrias de procesos. Además como parte de la gestión de estos sistemas la guía requiere un mantenimiento y control de los mismos durante toda su vida.[14] Basado en la norma ISA 18.2 se redactaron 7 pasos para el mejoramiento eficiente de las alarmas el sistemas automaticos incluidos los Sistemas de Control Distribuido.. Figura 1.6: Los 7 pasos para mejoramiento de gestion de alarmas.[14]. 4. Funciones de gestión de incidentes en planta. 5. Funciones de repaso de incidentes. 6. Funciones de grabación de secuencia de eventos que pasaron en planta o producción. 7. Funciones de control y operacion de forma remota. 8. Funciones de disponibilidad y gestion de base de datos en tiempo real de la planta.[15].
(40) 22 SOFTWARE EN LOS SISTEMAS DE CONTROL DISTRIBUIDO Se pueden establecer ciertas clasificaciones de software para los Sistemas de Control Distribuido: Software de configuración.Para la definición de los lazos de control y del algoritmo a aplicar en cada uno resulta de utilidad la disponibilidad de las siguientes utilidades: Definición de los puntos de entrada y sus respectivas interfaces de entrada: Termopar,Termorresistencia, trenes de impulsos etc. Capacidad de tratamiento de la señal de entrada: Filtrado, linearización, escalado, comprobación de límites, selección individual del tiempo de exploración, funciones de verificación, calibración y simulación, congelación de la señal por fallo de trasmisor, conversión a unidades de ingeniería. Capacidad de tratamiento adecuado de alarmas: Visualización en pantalla e impresora, discriminación del tipo de alarma, capacidad de jerarquización y priorización, facilidad de soportar aplicaciones de ayuda a la toma de decisiones o de diagnóstico inteligente, etc. Selección de algoritmos, atributos y funciones de control: • En procesos continuos: ◦ Algoritmos de control: PID, PID con cascada, PID con control en adelanto (FF), Control de relación, etc. ◦ Atributos asignados: Modos (Manual, Auto, Cascada, Ordenador), Inicialización, seguimiento (ó "tracking"), Saturación integral, Bumpless, Parada urgente, S.P. en rampa. ◦ Funciones de cálculo: Compensación de caudal, Totalizador, Sumador, Selectores, Funciones dinámicas: Tiempo muerto (DT, del inglés Dead Time) ó Lead-Lag (L/L), Módulo/s abierto/s. • En operaciones discretas, disfrutan de una serie de atributos para definir la lógica de las relaciones entre variables. ◦ Descripción de enclavamientos..
(41) 23 ◦ Definición de lógica (lenguaje ladder u otros). ◦ Control de accionamientos. • En procesos por cargas tienen sus propios mecanismos de definición, que se apoyan en utilidades para definir: ◦ Temporizadores y acceso a tiempo real. ◦ Secuenciación de operaciones. El tiempo de exploración debe ser configurable de forma que se pueda adaptar a la criticidad de cada lazo regulatorio o de cada instrucción lógica. Cada tarjeta de control tiene capacidad para el tratamiento de un número muy elevado de lazos y/o instrucciones, combinándose de forma que el tiempo de exploración global del conjunto de acciones de control atendidos por cada tarjeta sea del orden de 0,1 - 1 s (aún para un número muy elevado de E/S). Software de representación o visualización. Paquete de ayuda a la representación gráfica del sinóptico de operación, presentación en pantalla de la información requerida mediante zonas interactivas, configuración de grupos de variables y de tendencias, pantallas de detalle, de alarmas, de mensajes, gestión de informes, y en general todo lo necesario para personalizar las estaciones de operación y adquisición de datos. Con los sistemas anteriores se cubren las necesidades básicas de programación/configuración del DCS. La mayoría de los fabricantes incorpora no obstante en sus ofertas recientes el acceso a software auxiliar. Bajo este concepto se engloban diversos paquetes destinados a facilitar o mejorar las tareas de control, puesta en funcionamiento y mantenimiento. Entre otros pueden mencionarse los siguientes: Software de sintonización.- Para la rápida sintonización de lazos de control en la puesta en marcha. Software de ayuda a la configuración. Se refiere a ciertas utilidades de programación sobre PC de la configuración del DCS con posibilidad de transferencia directa del fichero desde el PC al DCS. Software de programación de aplicaciones avanzadas. Para la inclusión de cálculos dentro de las tareas de control, por ejemplo, control inferido,.
(42) 24 compensación de presión - temperatura, control de variables no medibles (carga térmica, entalpía, reflujo interno, etc). La disponibilidad del sistema de un lenguaje de programación adecuado para estas funciones puede eliminar la necesidad de acudir a un ordenador de proceso en la mayoría de los casos, lo que significa una mayor sencillez y economía. Software de operación. Aunque sin entrar en detalle, merece la pena mencionar la utilidad de paquetes de Control Estadístico de proceso, de utilidad para optimización, de Control Multivariable o de Sistemas Expertos de ayuda a la toma de decisiones o al diagnóstico inteligente, aunque estas últimas aplicaciones tradicionalmente corren sobre un ordenador de procesos conectado al DCS mediante una interfaz adecuada.[16]. 1.2.4.3.. Unidad de Terminal Remota (RTU). Las unidades terminales remotas consisten en una pequeña y robusta computadora que almacena datos y los transmite a la terminal maestra para que esta controle los instrumentos. Es una unidad stand-alone (independiente) de adquisición y control de datos. Su función es controlar el equipamiento de proceso en el sitio remoto, adquirir datos del mismo, y transferirlos al sistema central SCADA. La gama de Unidades Terminales Remotas (RTU) ofrece una solución universal para el control de instalaciones técnicas de todo tipo.[8]. 1.2.5.. Nivel de Instrumentación. Es la base de la pirámide del modelo CIM, en el nivel de instrumentación se encuentran la instrumentación de la planta que permite la adecuada ejecución del proceso de producción, realizando las acciones básicas en tiempo real de medición, que es su función principal como también de control, que realiza la instrumentación denominada inteligente, algo que se debe tener claro es la adecuación de señales provenientes de los sensores hacia el sistema, garantizando su compatibilidad. Los sensores son dispositivos que a partir de la energía del medio donde se mide dan una señal de salida transducible que es función de variable de medida[17], es decir, toma la medida de una magnitud exterior y la transforma a.
(43) 25 señales eléctricas que son posibles cuantificar, de esta manera realizar un control y monitoreo sobre ellas. Existen sensores como se muestra en la figura 1.7 de tipo analógico o digital que permiten medir temperatura, caudal, flujo, PH, densidad, viscosidad, peso, presión, proximidad, nivel entre otras. Los actuadores sirven de interfaz entre el proceso y el sistema de control, ya que reciben la orden de los controladores, realizan una acción planeada en la estrategia programada y se adaptan a los cambios en el control dinámico. Hay actuadores eléctricos, neumáticos, hidráulicos, ejemplo de estos son: Los motores, cilindros, chupas, electroválvulas, resistencias, ventiladores, válvulas, entre otros.. Figura 1.7: Instrumentación de medición. Los Autores. 1.3.. Comparativa entre PLC Y DCS. En el entorno de la automatización y control industrial, existen variadas opiniones encontradas sobre, cuales son los procesos o equipos más convenientes a la hora de realizar una automatización exitosa y acorde a las expectativas que se tienen sobre su implementación. Uno de los temas que ha tenido bastante discusión es la conveniencia de incorporación en la automatización en planta de Controladores Lógicos Programables o de equipos con especificaciones propias de un Sistema de Control Distribuido. Por lo tanto se tienen aspectos sobresalientes de cada uno, lo cual será de ayuda a los profesionales de automatización a la hora de una decisión acertada. Los PLCs surgen como reemplazo de los antiguos paneles de relays alambrados, haciéndolo de la misma forma pero por programa. Originalmente orien-.
(44) 26 tados a lógica discreta o booleana. Los Sistema de Control Distribuído són una evolución de los "controladores" autónomos (lógica regulatoria), es un sistema que es programado en forma centralizada, pero que su lógica se ejecuta en forma distribuida en equipos medianamente inteligentes y autónomos. Orientados principalmente a lógica regulatoria o análoga. Hoy por hoy, los equipos se parecen mucho, y difieren en los matices. Algunas diferencias que aún persisten. Forma de Programación/ejecución: DCS. Se configura centralizadamente, y el código se ejecuta en forma distriduida. Al menos en dos componentes: el controlador que ejecuta la lógica y el HMI (Interfaz Hombre Maquina) que realiza las funciones de visualización y registro. PLC. Su configuración se ejecuta en el controlador o PLC. Pero requiere de una programación separada para realizar las funciones de interfase de operador: visualización, registro, etc. Integridad de la programación: DCS. Relacionado con lo anterior, el código se configura/programa en un sólo paso en el controlador y HMI. PLC. En cambio, la programación en PLC y HMI se realiza en dos pasos completamente diferenciados. De hecho, se utilizan para ello dos herramientas de programación completamente distintas. Aunque en última versiones de PLCs esto ha cambiado ejemplo de ellos son los equipos de Siemens y su plataforma de programación integrada TIA Portal. Tiempos de ejecución: DCS. Ejecuta su lógica en forma periódica. Tiempos típicos de ejecución de ciclo son del orden de 50 milisegundos. PLC. Ejecuta su lógica tan rápido como puede, y vuelve a ejecutar el siguiente ciclo. Su ciclo es esencialmente variable y puede ir desde unos 5 milisegundos a unos 300 milisegundos..
(45) 27 Lenguajes de programación. También son ahora prácticamente iguales, pero lo normal es: DCS. Se programa normalmente en diagramas de bloques funcionales. PLC. Se programa naturalmente en diagrama de escalera o "LADDER". Aunque hoy el estándar es que use cuatro o cinco lenguajes distintos, dentro de los que está también el diagrama de bloques o funciones. Gestión de alarmas: DCS. Las alarmas son gestionadas a nivel primario por el controlador; después el HMI las despliega, registra y son manipuladas por el operador. PLC. Las alarmas son normalmente gestionadas en su totalidad por el HMI De todas las diferencias mencionadas, las que es más notoria es la Integridad de la programación, ya que puede llegar a representar para el configurador un ahorro notable de esfuerzo. Que es compensado parcialmente por la facilidad con que el PLC se configura, y la difusión mayor que tiene.[18]. 1.4.. Comparativa entre SCADA Y DCS.. La historia muestra que se trata de dos soluciones tecnológicas que nacieron muy lejanas una de otra, pero en el camino han ido convergiendo. Cada vez se parecen más y sus campos de aplicación se traslapan. Al mismo tiempo, hay mucha confusión sobre el concepto de cada una de estas tecnologías. Es frecuente que los usuarios no sepan distinguir una solución PLC + SCADA de una solución DCS. Incluso uno se puede encontrar con proveedores que no lo tienen claro, y también los que dicen cualquier cosa con tal de vender su producto. En lo investigado actualmente no se pueden señalar a priori grandes diferencias entre un sistema PLC + SCADA y un DCS. Analizando que cada comparación amerita un análisis especifico. Es decir, no se puede catalogar a todos los PLC + SCADA en un grupo y todos los DCS en otro. Hay que entrar al detalle, adoptando tanto el punto de vista del usuario como del desarrollador de aplicaciones..
(46) 28 Por lo tanto, las diferencias más importantes, y que quizás perduren por algún tiempo, son las siguientes. En un DCS existe una sola base de datos. Una variable se define en la base de datos y ella ya existe, tanto para los controladores como para el software que supervisa. En cambio, en una solución PLC + SCADA, se define una variable en un PLC, y otra variable en el SCADA. Pese a que ambas variables se refieren a lo mismo, por ejemplo la temperatura en un reactor, nada relaciona a una variable con la otra. El programador (o los programadores, el del PLC y el del SCADA) deben desarrollar programación a medida para vincular una variable con la otra. Para complicar más la cosa, las herramientas de ingeniería (software) que se usan para programar y/o configurar los PLCs y los SCADAs son dos herramientas diferentes. En cambio, en los DCSs la herramienta es una sola. Es más, en el DCS una aplicación es una sola. Se desarrolla centralizadamente una aplicación única que contiene las configuraciones y los programas de control de todos los controladores y también la configuración de la interface gráfica, alarmas, trendings, etc. En cambio en los sistemas SCADA + PLCs cada PLC tiene un programa y el SCADA tiene su configuración propia. Son cosas separadas y para lograr que operen como una unidad integrada es necesario desarrollar programación a medida. Por lo demás, con SCADA + PLCs se pueden desarrollar aplicaciones muy pequeñas y muy baratas, pues existe en el mercado una gama continua de PLCs y softwares SCADA simples y económicos. En cambio los DCS siempre son sofisticados, robustos, y con unos costos más elevados, aplicables a sistemas de 1,000 IOs para arriba.[19].
(47) Capítulo 2 ESTUDIO FABRICANTE.. En la actualidad cada uno de los fabricantes más importantes en lo que a sistema de automatización se trata, ha desarrollado el equipamiento necesario para poseer una arquitectura distribuida. Brindando equipos inteligentes que usan igualmente buses de comunicación, que transmisión a corriente. Esta modularidad y amplia gama de equipamiento hacen que los sistemas sean escalables desde una pequeña aplicación, hasta complejos sistemas de alta disponibilidad.[12] FOXBORO tiene su I/A, YOKOGAWA el CENTUM VP, EMERSON el OVATION, HONEYWELL desarrolló el EXPERION PKS, SIEMENS el PCS 7 y ABB con 800xA, todos estos sistemas cuentan con una configuración típica de un DCS pero los equipos de HONEYWELL y SIEMENS en el mercado de la automatización industrial no responden a las exigencias de un DCS, toda vez que estos equipos son PLCs con altas prestaciones, mientras que equipos de FOXBORO, YOKOGAWA, EMERSON y ABB incluyen componentes funcionales propios de este tipo de sistemas distribuidos, los cuales se muestra en La figura 2.1.. 29.
(48) 30. Figura 2.1: Componentes Funcionales de un DCS.[20]. Los proveedores de tecnología con aplicación distribuida, presentan en sus diseños y arquitecturas unas características que son predominantes en sus presentaciones de equipos, brouches o manuales de especificaciones técnicas. Dichas características son desarrolladas en retroalimentación con opiniones de sus clientes y las necesidades que se observan en el mercado cambiante de la tecnología. En el análisis de información y estudio de la documentación que se dispone sobre sistemas de control distribuido las características principales encontradas son: Robustez/Redundancia: La exigencia de la funcionalidad de redundancia en la mayoría de los componentes del sistema (Procesador, módulos entrada/salida, fuente de alimentación, entre otros) provee al sistema de control distribuido la capacidad de realizar operaciones ininterrumpidas, garantizando la operatividad y productividad en la planta donde se halla implementado. Operaciones de Mantenimiento: Los sistemas implementados deben estar caracterizados y documentados facilitando un mantenimiento preventivo y correctivo, rápido y eficiente por parte de personal vinculado a la planta o profesionales con conocimientos en sistemas de control..
Figure

![Figura 1.5: Vision sistema DCS/SCADA.[13]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309637.352200/37.892.210.710.108.419/figura-vision-sistema-dcs-scada.webp)
![Figura 2.4: Arquitectura DCS DELTAV.[23]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309637.352200/54.892.170.814.176.520/figura-arquitectura-dcs-deltav.webp)
![Figura 2.8: Arquitectura del sistema SIMATIC PCS 7.[27]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309637.352200/60.892.175.784.107.560/figura-arquitectura-del-sistema-simatic-pcs.webp)
+7



Documento similar