UNIVERSIDAD NACIONAL DE TRUJILLO
FACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA MECÁNICA
ANÁLISIS DINÁMICO ESTRUCTURAL DE VIGA CAJÓN,
DE PUENTE GRÚA BIRRÁIL CLASE D PARA MEJORAR
SUS CONDICIONES DE OPERACIÓN
Tesis para optar el título profesional de Ingeniero Mecánico
Autores:
BR. CABANILLAS LEZAMA, RAYDER FRÁNKLIN
BR. ORIBE CASTILLO, CHRISTIAN ALEXANDER
Asesor:
MG. JULCA VERÁSTEGUI, LUIS ALBERTO
Trujillo - Perú
ACTA DE SUSTENTACIÓN
TRABAJO DE INVESTIGACIÓN
Título:
“ANÁLISIS DINÁMICO ESTRUCTURAL DE VIGA CAJÓN, DE PUENTE GRÚA BIRRÁIL CLASE D PARA MEJORAR SUS CONDICIONES DE OPERACIÓN”
Autores:
Br. Cabanillas Lezama, Rayder Fránklin Br. Oribe Castillo, Christian Alexander
Asesor:
Mg. Julca Verástegui, Luis Alberto
El jurado evaluador del trabajo de investigación para obtener el título profesiona l de Ingeniero Mecánico que han presentado los bachilleres en mención, acuerdan APROBAR POR ……… y recomiendan su difusión del mismo para el conocimiento de la comunidad académica.
JURADO EVALUADOR
Presidente del Jurado:
Ing. EDWUAR JAVIER LEON LESCANO
Secretario del Jurado:
Ing. JUAN ELY DAVID ACOSTA HORNA
Vocal del Jurado:
Ing. LUIS ALBERTO JULCA VERÁSTEGUI
DEDICATORIA
A Dios, por haberme creado y permitido alcanzar este triunfo, por amarme, orientarme y ser la fuerza para seguir adelante.
A mi padre, Juan Cabanillas porque puso todo su esfuerzo y dedicación para ayudarme a tomar las decisiones correctas y forjar en mí un ser de provecho.
A mi madre, Frida Lezama que tejió mi alma con su ternura, paciencia y sacrificio permanente para que pueda alcanzar mis metas.
A mis hermanas, Patricia y Miluzka por su apoyo y cariño.
A mi familia y amistades que hicieron lo posible de alguna u otra manera, el apoyarme incondicionalmente en todo momento, con el único fin de culminar satisfactoriamente
esta primera etapa importante en mi vida de obtener mi título profesional, el cual fue llevado a cabo con mucho esfuerzo y dedicación.
DEDICATORIA
La culminación de esta etapa de mi vida está dedicada a mis padres Mario Oribe y Marilú Castillo quienes a lo largo de mi vida han velado por mi bienestar y educación siendo mi apoyo en todo momento y lugar; que depositaron su entera confianza en cada reto que se me presentaba sin dudar ni un solo instante en mi inteligencia y capacidad de
lograr lo que me haya propuesto. Es por ello que soy lo que soy ahora. Su tenacidad y lucha insaciable han hecho de ellos el gran ejemplo a seguir y destacar, no solo para mí,
sino para mi hermana y familia en general. A ellos este proyecto.
A mi hermana por su apoyo y cariño brindado me ayudo a mi realización como Ingeniero Mecánico.
A mis familiares y amistades que hicieron lo posible de alguna u otra manera, el apoyarme en todo momento y así poder culminar de la mejor manera mis metas propuestas, las cuales fueron realizadas con gran empeño y entrega hasta su culminación
AGRADECIMIENTO
A Dios, por su infinito amor y misericordia, siendo mi amparo y refugio en cada prueba puesta en mi camino. Ya que apartado de él nada puedo hacer.
A mis padres, Juan Cabanillas y Frida Lezama por la educación, amor y enseñanzas que recibí para lograr una de las metas más importantes en mi vida. A mis hermanas, Patricia y Miluzka por su apoyo y cariño para seguir adelante. Gracias por confiar en mí; solo puedo decirle gracias por todo.
A Christian Oribe Castillo, mi compañero de tesis y amigo incondicional. Por aquel día que me brindo ánimo y sentido de perseverancia para cumplir lo que nos habíamos propuesto, así también por aquellos días que me esperaba desde temprano en la bibliotec a de la universidad para culminar este proyecto.
Al Ing. Luis Julca Verastegui, el cual fue parte de mi proceso de aprendizaje en mi formación académica, y su asesoría brindada en la realización de este proyecto. A los docentes quienes, durante el periodo de aprendizaje y formación académica, me supieron inculcar conocimientos referentes a la carrera.
A mi amigo Albert Segura Cenas, por brindarme su invaluable amistad. A mi grupo de Ingeniería mecánica con quienes compartí increíbles anécdotas en mi vida universitaria.
“Lo que nos hemos propuesto lo hemos logrado”
AGRADECIMIENTO
A la Universidad Nacional de Trujillo, a la Facultad de Ingeniería y la Escuela de Ingeniería Mecánica por todo el conocimiento adquirido.
A mis padres Mario Oribe y Marilú Castillo, por la educación, amor y enseñanzas que me brindan día a día desde el momento que nací. A mi hermana Estefany, por su cariño y apoyo brindado durante todo el tiempo que nos apoyamos en nuestra vida universitaria.
A mi compañero de tesis Rayder Cabanillas Lezama y amigo por aquel día en que decidimos iniciar y terminar el proyecto que nos propusimos realizar por más obstáculos que se pudieron presentar.
A mi asesor de tesis Ing. Luis Julca Verastegui, y a todos mis profesores, quienes fueron los pilares fundamentales para el desarrollo de mi formación y conocimiento que han formado parte de mi experiencia académica durante todo este tiempo.
Gracias a mis compañeros y amigos de la Universidad, porque estos años han sido inolvidables, con quienes compartí increíbles anécdotas durante el transcurso de mi vida universitaria; nuestra amistad y apoyo ha tenido un valor incalculable en mi persona; en forma muy especial a mi amigo y compañero Fernando Vasquez Herrera que me ayudo en forma incondicional y siempre estuvo conmigo en todo momento.
Ya todos aquellos de que de alguna forma colaboraron en el desarrollo de este proyecto que me propuse en mi vida.
RESUMEN
En la presente tesis se realizo un análisis dinámico estructural de un Puente Grúa tipo cajón birráil de clase D con capacidades de carga 5, 10, 15, 20, 25 y 30 toneladas y luces de 10, 15, 20, 25 y 30 metros, con la finalidad de mejorar las condiciones de operación.
Se realizo una encuesta para la recolección de datos de entrada, que son las condicione s donde la viga principal operara. Se realizaron cuatro etapas de análisis: siendo la primera el diseño de forma; la segunda las cargas principales y factores de influencia; la tercera los esfuerzos, factores de seguridad y deformaciones; y la cuarta etapa para la respuesta dinámica de la viga. Mediante el análisis dinámico estructural y uso de rigidizadores en viga cajón para diferentes luces y estados de carga; se logró mejorar indicadores tales como: rigidez y peso del puente grúa birráil.
ABSTRACT
In the present thesis, a dynamic structural analysis of a D-type buckle-type crane with load capacities 5, 10, 15, 20, 25 and 30 tons and 10, 15, 20, 25 and 30 meter lights, With the aim of improving operating conditions.
A survey was conducted to collect input data, which are the conditions where the main beam will operate. Four stages of analysis were performed: the former being the shape design; The second the main loads and influencing factors; The third the efforts, safety factors and deformations; And the fourth stage for dynamic beam response. Through the dynamic structural analysis and use of stiffeners in drawer beam for different lights and load states; It was possible to improve indicators such as: rigidity and weight of the birráil crane bridge.
ÍNDICE GENERAL
ACTA DE SUSTENTACIÓN... 2
DEDICATORIA ... 3
AGRADECIMIENTO... 5
RESUMEN ... 7
ABSTRACT... 8
ÍNDICE GENERAL ... 9
ÍNDICE TABLAS ... 12
ÍNDICE GRÁFICOS ... 16
SIMBOLOGÍA ... 21
CAPÍTULO I: INTRODUCCIÓN ... 23
1.1. PROBLEMA ... 23
1.1.1. Realidad problemática ... 23
1.1.2. Antecedentes del Problema ... 25
1.1.3. Formulación del Problema... 26
1.1.4. Justificación de Estudio ... 27
1.1.5. Limitaciones del problema... 27
1.2. OBJETIVOS ... 28
1.2.1. Objetivo General ... 28
1.2.2. Objetivo Específicos ... 28
CAPÍTULO II: MARCO REFERENCIAL ... 29
2.1. PUENTE GRÚA ... 29
2.1.1. Estructura ... 29
2.1.2. Clasificación ... 30
2.1.3. Mecanismos... 31
2.1.4. Clase de Servicio ... 31
2.1.6. Ciclo de Carga ... 34
2.2. PESO METÁLICO DE LAS CONSTRUCCIONES ... 34
2.3. RIGIDEZ DE LAS CONSTRUCCIONES ... 36
2.4. ANÁLISIS ESTRUCTURAL DE VIGA PRINCIPAL ... 37
2.4.1. Viga Principal ... 37
2.4.2. Tipos de Cargas... 38
2.4.3. Esfuerzos y Deformaciones ... 41
2.4.4. Análisis de Pandeo ... 45
2.5. ANÁLISIS DINÁMICO DE VIGA PRINCIPAL ... 50
2.5.1. Fundamentos de Vibraciones ... 50
2.5.2. Vibración de vigas ... 52
CAPÍTULO III: METODOLOGÍA ... 65
3.1. HIPÓTESIS ... 65
3.2. RECOPILACIÓN DE LA INFORMACIÓN ... 65
3.2.1. Diseño de Investigación ... 65
3.2.2. Plan Esquemático de Investigación ... 65
3.2.3. Población y muestra... 66
3.2.4. Técnicas e instrumentos de recolección de datos ... 66
3.2.5. Procedimiento de recolección de datos ... 66
3.2.6. Métodos de análisis de datos ... 66
3.2.7. Consideraciones éticas ... 67
3.3. EQUIPOS ... 67
3.4. PROCEDIMIENTO ... 68
3.4.1 Primera Etapa ... 69
3.4.2 Segunda Etapa ... 70
3.4.3 Tercera Etapa... 73
3.4.4 Cuarta Etapa ... 74
CAPÍTULO IV: RESULTADOS ... 78
4.1. ANÁLISIS ESTÁTICO DE VIGA PRINCIPAL ... 78
4.1.1 Dimensiones Geométricas ... 78
4.1.2 Cálculo de las propiedades de la sección transversal ... 81
4.1.3 Cálculo de cargas ... 82
4.1.4 Cálculo de Esfuerzos ... 84
4.1.5 Cálculo de la Deformación ... 86
4.1.6 Modelado de la viga en software CAD ... 87
4.1.7 Simulación de la viga ensoftware CAE ... 94
4.1.8 Dimensiones geométricas de Riguidizadores transversal-longitudinal ... 110
4.1.9 Cálculo del Factor de Seguridad ... 111
4.1.10 Cálculo del Indice de Rigidez... 112
4.1.11 Cálculo del Peso Específico ... 113
4.2. CÁLCULO DEL ANÁLISIS DINÁMICO... 120
4.2.1 Cálculo de la Deformación de una Carga Móvil ... 120
4.2.2 Simulación en Robot Structural 2015 ... 123
4.2.3 Cálculo de la Frecuencia de vibración ... 136
4.2.4 Cálculo de la Frecuencia de Excitación de la carga móvil ... 140
4.2.5 Cálculo del parámetro de velocidad ... 140
4.2.6 Cálculo de la Deformación de una Carga en Movimiento ... 141
CAPÍTULO V: ANÁLISIS DE RESULTADOS... 171
5.1 ANÁLISIS DE RESULTADOS MEDIANTE CALCULOS ANALÍTICOS Y LOS OBTENIDOS USANDO SOFTWARE DE SIMULACIÓN ... 171
CAPÍTULO VI: CONCLUSIONES Y RECOMENDACIONES ... 174
REFERENCIAS BIBLIOGRÁFICAS ... 177
ÍNDICE TABLAS
Tabla 2. 1. Clase de servicio en términos de carga y ciclos de carga. [14] ... 34
Tabla 2. 2. Esfuerzos admisibles. [27] ... 44
Tabla 2. 3. Valores de los coeficientes “K” de abolladura. [27] ... 48
Tabla 3. 1. Velocidades de operación recomendadas. [27]... 70
Tabla 3. 2. Tabla de aceleración para motores AC y DC. [27] ... 72
Tabla 4. 1. Dimensiones geométricas de la viga para una luz 10 m a diferentes cargas ... 79
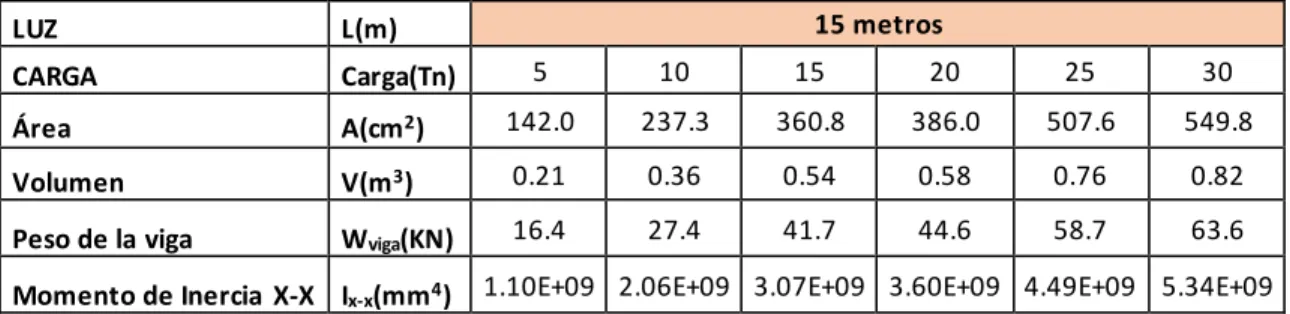
Tabla 4. 2. Dimensiones geométricas de la viga para una luz 15m a diferentes cargas ... 80
Tabla 4. 3. Dimensiones geométricas de la viga para una luz 20 m a diferentes cargas ... 80
Tabla 4. 4. Dimensiones geométricas de la viga para una luz 25 m a diferentes cargas ... 80
Tabla 4. 5. Dimensiones geométricas de la viga para una luz 30 m a diferentes cargas ... 81
Tabla 4. 6. Propiedad de la sección de la viga para una luz 10 m a diferentes cargas ... 81
Tabla 4. 7.. Propiedad de la sección de la viga para una luz 15 m a diferentes cargas ... 81
Tabla 4. 8. Propiedad de la sección de la viga para una luz 20 m a diferentes cargas ... 82
Tabla 4. 9. Propiedad de la sección de la viga para una luz 25 m a diferentes cargas ... 82
Tabla 4. 10. Propiedad de la sección de la viga para una luz 30 m a diferentes cargas ... 82
Tabla 4. 11. Cargas de la viga para una luz de 10 m a diferentes cargas ... 83
Tabla 4. 12. Cargas de la viga para una luz de 15 m a diferentes cargas ... 83
Tabla 4. 13. Cargas de la viga para una luz de 20 m a diferentes cargas ... 83
Tabla 4. 14. Cargas de la viga para una luz de 25 m a diferentes cargas ... 84
Tabla 4. 15. Cargas de la viga para una luz de 30 m a diferentes cargas ... 84
Tabla 4. 16. Esfuerzos al punto medio de la viga 10 m a diferentes cargas ... 85
Tabla 4. 17. Esfuerzos al punto medio de la viga 15 m a diferentes cargas ... 85
Tabla 4. 19. Esfuerzos al punto medio de la viga 25 m a diferentes cargas ... 85
Tabla 4. 20. Esfuerzos punto medio de la viga 30 m a diferentes cargas ... 86
Tabla 4. 21. Deformación de la viga para una luz de 10 m a diferentes cargas ... 86
Tabla 4. 26. Deformación maxima de la viga para una luz 10 m a diferentes cargas ...105
Tabla 4. 27. Deformación máxima de la viga para una luz 15 m a diferentes cargas ...105
Tabla 4. 28. Deformación máxima de la viga para una luz 20 m a diferentes cargas ...105
Tabla 4. 34. Deformación máxima de la viga para una luz 25 m a diferentes cargas ...105
Tabla 4. 35. Deformación máxima de la viga para una luz 30 m a diferentes cargas ...106
Tabla 4. 36. Esfuerzo Máximo de la viga para una luz 10 m a diferentes cargas ...107
Tabla 4. 37. Esfuerzo Máximo de la viga para una luz 15 m a diferentes cargas ...107
Tabla 4. 38. Esfuerzo Máximo de la viga para una luz 20 m a diferentes cargas ...107
Tabla 4. 39. Esfuerzo Máximo de la viga para una luz 25 m a diferentes cargas ...107
Tabla 4. 40. Esfuerzo Máximo de la viga para una luz 30 m a diferentes cargas ...108
Tabla 4. 41. Esfuerzo Máximo de la viga para una luz 10 m a diferentes cargas ...109
Tabla 4. 42. Esfuerzo Máximo de la viga para una luz 15 m a diferentes cargas ...109
Tabla 4. 43. Esfuerzo Máximo de la viga para una luz 20 m a diferentes cargas ...109
Tabla 4. 44. Esfuerzo Máximo de la viga para una luz 25 m a diferentes cargas ...109
Tabla 4. 45. Esfuerzo Máximo de la viga para una luz 30 m a diferentes cargas ...110
Tabla 4. 46. Riguidizadores tranversales y longitudinales luz 10 m a diferentes cargas ...110
Tabla 4. 47. Rigidizadores tranversales y longitudinales luz 15 m a diferentes cargas ...110
Tabla 4. 48. Rigidizadores tranversales y longitudinales luz 20 m a diferentes cargas ...110
Tabla 4. 49. Rigidizadores tranversales y longitudinales luz 25 m a diferentes cargas ...111
Tabla 4. 50. Rigidizadores tranversales y longitudinales luz 30 m a diferentes cargas ...111
Tabla 4. 52. Factor de seguridad de la viga para una luz 15 m a diferentes cargas ...111
Tabla 4. 53. Factor de seguridad de la viga para una luz 20 m a diferentes cargas ...111
Tabla 4. 54. Factor de seguridad de la viga para una luz 25 m a diferentes cargas ...112
Tabla 4. 55. Factor de seguridad de la viga para una luz de 30 m a diferentes cargas...112
Tabla 4. 56. Indice de rigidez de la viga para una luz de 10 m a diferentes cargas ...112
Tabla 4. 57. Indice de rigidez de la viga para una luz de 15 m a diferentes cargas ...112
Tabla 4. 58. Indice de rigidez de la viga para una luz de 20 m a diferentes cargas ...112
Tabla 4. 59. Indice de rigidez de la viga para una luz de 25 m a diferentes cargas ...113
Tabla 4. 60. Indice de rigidez de la viga para una luz de 30 m a diferentes cargas ...113
Tabla 4. 61. Peso especifico de la viga para una luz de 10 m a diferentes cargas ...113
Tabla 4. 62. Peso especifico de la viga para una luz de 15 m a diferentes cargas ...114
Tabla 4. 63. Peso especifico de la viga para una luz de 20 m a diferentes cargas ...114
Tabla 4. 64. Peso de la viga para una luz de 25 m a diferentes cargas...114
Tabla 4. 65. Peso de la viga para una luz de 30 m a diferentes cargas...114
Tabla 4. 66. Deformación de una carga móvil para una luz 10 m a diferentes cargas...120
Tabla 4. 67. Frecuencia de vibración luz 10 m a diferentes cargas ...136
Tabla 4. 68. Frecuencia de excitación de la carga móvil...140
Tabla 4. 69. Parametro de velocidad 10 m a diferentes cargas ...140
Tabla 4. 70.Deformación de carga en movimiento luz 10m y carga 5 ton ...141
Tabla 4. 71.Deformación de carga en movimiento luz 10m y carga 10 ton ...142
Tabla 4. 72.Deformación de carga en movimiento luz 10m y carga 10 ton ...143
Tabla 4. 73.Deformación de carga en movimiento luz 10m y carga 15 ton ...144
Tabla 4. 74.Deformación de carga en movimiento luz 10m y carga 25 ton ...145
Tabla 4. 76.Deformación de carga en movimiento luz 15m y carga 05 ton ...147
Tabla 4. 77.Deformación de carga en movimiento luz 15m y carga 10 ton ...148
Tabla 4. 78.Deformación de carga en movimiento luz 15m y carga 15 ton ...149
Tabla 4. 79.Deformación de carga en movimiento luz 15m y carga 20 ton ...150
Tabla 4. 80.Deformación de carga en movimiento luz 15m y carga 25 ton ...151
Tabla 4. 81.Deformación de carga en movimiento luz 15m y carga 30 ton ...152
Tabla 4. 82.Deformación de carga en movimiento luz 20m y carga 05 ton ...153
Tabla 4. 83.Deformación de carga en movimiento luz 20m y carga 10 ton ...154
Tabla 4. 84.Deformación de carga en movimiento luz 20m y carga 15 ton ...155
Tabla 4. 85.Deformación de carga en movimiento luz 20m y carga 20 ton ...156
Tabla 4. 86.Deformación de carga en movimiento luz 20m y carga 25 ton ...157
Tabla 4. 87.Deformación de carga en movimiento luz 20m y carga 30 ton ...158
Tabla 4. 88.Deformación de carga en movimiento luz 25m y carga 05 ton ...159
Tabla 4. 89.Deformación de carga en movimiento luz 25m y carga 10 ton ...160
Tabla 4. 90.Deformación de carga en movimiento luz 25m y carga 15 ton ...161
Tabla 4. 91.Deformación de carga en movimiento luz 25m y carga 20 ton ...162
Tabla 4. 92.Deformación de carga en movimiento luz 25m y carga 25 ton ...163
Tabla 4. 93.Deformación de carga en movimiento luz 25m y carga 30 ton ...164
Tabla 4. 94.Deformación de carga en movimiento luz 30m y carga 05 ton ...165
Tabla 4. 95.Deformación de carga en movimiento luz 30m y carga 10 ton ...166
Tabla 4. 96.Deformación de carga en movimiento luz 30m y carga 15 ton ...167
Tabla 4. 97.Deformación de carga en movimiento luz 30m y carga 20 ton ...168
Tabla 4. 98.Deformación de carga en movimiento luz 30m y carga 25 ton ...169
ÍNDICE GRÁFICOS
Figura 2. 1. Estructura de un puente grúa. [21] ... 29
Figura 2. 2. Puente grúa monorraíl. [21] ... 30
Figura 2. 3. Puente grúa birráil. [21] ... 30
Figura 2. 4. Mecanismos de un puente grúa. [22] ... 31
Figura 2. 5. Unión de dos perfiles con soldadura. [5] ... 37
Figura 2. 6. Placas metálicas soldadas. [5] ... 37
Figura 2. 7. Perfiles laminados tipo I. [5] ... 38
Figura 2. 8. Gráfico para obtener coeficiente Ssk. [10]... 40
Figura 2. 9. Vista parcial de la viga principal y la sección transversal. [7] ... 41
Figura 2. 10. Variaciones del esfuerzo de flexión. [24] ... 42
Figura 2. 11. Distribuciones de las tensiones tangenciales y normales. [25] ... 43
Figura 2. 12. Placa rectangular sujeta a carga. [28] ... 46
Figura 2. 13. Rigidizadores longitudinales y transversales. [30]... 49
Figura 2. 14. Cantidad de grados de libertad. [31] ... 50
Figura 2. 15. Viga en voladizo con infinitos grados de libertad. [31]... 51
Figura 2. 16. Deformación de una viga sometida a momentos en los extremos. [32] ... 53
Figura 2. 17. Deformación de una viga sometida a carga transversal. [32]... 54
Figura 2. 18. Viga sobre una base elástica, bajo cargas axiales y transversales. [32]... 54
Figura 2. 19. Condiciones límites comunes para la vibración transversal de viga. [31] ... 59
Figura 3. 1. Archivo Excel del Análisis Estático... 78
Figura 3. 2. Deformacion y factor de seguridad de viga 10 m ... 79
Figura 3. 3. Deformación máxima en el centro de la viga ... 86
Figura 3. 3. Ventana gráfica de Autodesk Inventor Professional 2016... 87
Figura 3. 4. Modelado CAD de Viga Cajón ... 88
Figura 3. 5. Modelado alas de viga cajón en forma adaptativa ... 89
Figura 3. 6. Modelado Parametrico de viga cajón ... 90
Figura 3. 7. Ensamblaje de Viga Cajón ... 91
Figura 3. 8. Activamos Launch Active Model ... 92
Figura 3. 9. Importación del modelo CAD al Software Simulation Mechanical ... 93
Figura 3. 10. Ventana gráfica de Autodesk Simulation Mechanical 2016 ... 94
Figura 3. 11. Simulación de Analisis Estático de la viga ... 95
Figura 3. 12. Consideraciones del tipo de los elementos ... 96
Figura 3. 13. Consideraciones del material... 97
Figura 3. 14.Consideraciones de la gravedad... 98
Figura 3. 15. Consideraciones de las cargas ... 99
Figura 3. 16. Consideraciones de mallado ...100
Figura 3. 17. Proceso de mallado ...101
Figura 3. 18. Run Simulation ...102
Figura 3. 19. Analisis de viga cajón...103
Figura 3. 20. Deformación máxima y minima. ...104
Figura 3. 19. Esfuerzos de Von Mises ...106
Figura 3. 20. Factor de seguridad ...108
Figura 3. 22. Factor de Seguridad y Rigidez luz 15 m a diferentes cargas...116
Figura 3. 23. Factor de Seguridad y Rigidez luz 20 m a diferentes cargas...117
Figura 3. 24. Factor de Seguridad y Rigidez luz 25 m a diferentes cargas...118
Figura 3. 25. Factor de Seguridad y Rigidez luz 30 m a diferentes cargas...119
Figura 3. 26. Deformación de la carga móvil para una luz 10 m a diferentes cargas ...120
Figura 3. 27. Deformación de la carga móvil para una luz 15 m a diferentes cargas ...121
Figura 3. 28. Deformación de la carga móvil para una luz 20 m a diferentes cargas ...121
Figura 3. 29. Deformación de una carga móvil para una luz 25 m a diferentes cargas...122
Figura 3. 30. Deformación de una carga móvil para una luz 30 m a diferentes cargas...122
Figura 4. 31. Inicio del Robot Structural ...123
Figura 3. 32. Tipo proyecto pórtico espacial ...124
Figura 3. 33. Longitud de la viga...125
Figura 3. 34. Restricciones de la viga ...126
Figura 3. 35. Cargas y aplicación de las mismas ...127
Figura 3. 36. Camino de la carga ...128
Figura 3. 37. Perfil de viga tipo cajón ...129
Figura 3. 38. Graficos de deformaciones...130
Figura 3. 39. Deflexión debido a cargas dinámicas en viga de 10 m de luz ...131
Figura 3. 40. Deflexión debido a cargas dinámicas en viga de 15 m de luz ...132
Figura 3. 41. Deflexión debido a cargas dinámicas en viga de 20 m de luz ...133
Figura 3. 42. Deflexión debido a cargas dinámicas en viga de 25 m de luz ...134
Figura 3. 46. Deflexión debido a cargas dinámicas en viga de 30 m de luz ...135
Figura 3. 47. Frecuencia natural de la viga a diferentes luces y cargas ...136
Figura 3. 49. Run Simulation de frecuencias ...138
Figura 3. 50. Primero modo de la frecuencia natural ...139
Figura 3. 51. Parametro de velocidad...140
Figura 3. 52. Deformación de carga en movimiento luz 10m y carga 5 ton ...141
Figura 3. 53. Deformación de carga en movimiento luz 10m y carga 5 ton ...142
Figura 3. 54. Deformación de carga en movimiento luz 10m y carga 10 ton ...143
Figura 3. 55. Deformación de carga en movimiento luz 10m y carga 15 ton ...144
Figura 3. 56. Deformación de carga en movimiento luz 10m y carga 25 ton ...145
Figura 3. 57. Deformación de carga en movimiento luz 10m y carga 30 ton ...146
Figura 3. 58. Deformación de carga en movimiento luz 15m y carga 05 ton ...147
Figura 3. 59. Deformación de carga en movimiento luz 15m y carga 10 ton ...148
Figura 3. 60. Deformación de carga en movimiento luz 15m y carga 15 ton ...149
Figura 3. 61. Deformación de carga en movimiento luz 15m y carga 20 ton ...150
Figura 3. 62. Deformación de carga en movimiento luz 15m y carga 25 ton ...151
Figura 3. 63. Deformación de carga en movimiento luz 15m y carga 30 ton ...152
Figura 3. 64. Deformación de carga en movimiento luz 20m y carga 05 ton ...153
Figura 3. 65. Deformación de carga en movimiento luz 20m y carga 10 ton ...154
Figura 3. 66. Deformación de carga en movimiento luz 20m y carga 15 ton ...155
Figura 3. 67. Deformación de carga en movimiento luz 20m y carga 20 ton ...156
Figura 3. 68. Deformación de carga en movimiento luz 20m y carga 25 ton ...157
Figura 3. 69. Deformación de carga en movimiento luz 20m y carga 30 ton ...158
Figura 3. 70. Deformación de carga en movimiento luz 25m y carga 05 ton ...159
Figura 3. 71. Deformación de carga en movimiento luz 25m y carga 10 ton ...160
Figura 3. 73. Deformación de carga en movimiento luz 25m y carga 20 ton ...162
Figura 3. 74. Deformación de carga en movimiento luz 25m y carga 25 ton ...163
Figura 3. 75. Deformación de carga en movimiento luz 25m y carga 30 ton ...164
Figura 3. 76. Deformación de carga en movimiento luz 30m y carga 05 ton ...165
Figura 3. 77. Deformación de carga en movimiento luz 30m y carga 10 ton ...166
Figura 3. 78. Deformación de carga en movimiento luz 30m y carga 15 ton ...167
Figura 3. 79. Deformación de carga en movimiento luz 30m y carga 20 ton ...168
Figura 3. 80. Deformación de carga en movimiento luz 30m y carga 25 ton ...169
SIMBOLOGÍA
DL = Carga Muerta (N) TL = Carga del Trolley (N) LL = Carga de izaje (N)
VIF = Fuerzas de inercia vertical (N) DLF = Factor por carga muerta (N) HLF = Factor por carga de izaje (N)
IFD = Fuerzas de Inercia de unidades motrices (N) WLO = Carga por Viento (N)
SK = Cargas de Desgaste (N)
Mu = Momento flexión aplicado (Nm)
Vu = Cortante aplicado (MPa)
Mn = Momento flexión diseño, nominal (Nm)
Vn = Cortante de diseño, nominal. (MPa)
H = Altura de la viga. (mm)
H1 = Altura de la sección transversal del soporte. (mm)
c = Longitud chaflán (mm) bp = Ancho del ala. (mm)
δc = Espesor del alma. (mm)
δp = Espesor del ala. (mm)
a = Diafragma principal. (mm)
a1 = Distancia diafragma auxiliar. (mm)
Ix = Momento de inercia. (mm)
Sx = Modulo resistente
τ = Esfuerzo cortante
Falma = Sección del alma del perfil (mm2)
E = módulo de elasticidad del acero (kg/cm2)
G = Módulo de rigidez del acero. v = relación de Poisson
σ𝑐𝑟.𝑖 = tensión normal de abolladura τ𝑐𝑟.𝑖 = tensión tangencial abolladura
σE = Tensión crítica de Euler dada por [kg/cm2]
𝜎𝑐𝑜.𝑖 = Tensión de comparación ideal de abolladura 𝜎1∗ = Tensión compresión máxima.
𝜏∗ = Tensión tangenciales máxima.
𝐼𝑅 = Momento de inercia de un rigidizador transversal ha-t= altura del rigidizador transversal
d = distancia entre rigidizadores consecutivos ha-l = Largo del rigidizador
M* = Máximo momento flector ponderado que actúa sobre la viga, o tramo de la misma considerado.
L = Longitud técnica de pandeo lateral, o sea, la máxima distancia entre puntos del cordón comprimido firmemente inmovilizados en el plano normal a la viga.
Iy = Momento de inercia de la sección total de la viga respecto al eje contenido en el plano
de flexión.
CAPÍTULO I: INTRODUCCIÓN
1.1. PROBLEMA
1.1.1. Realidad problemática
El sector metalmecánico en el Perú reporta un movimiento económico anual de US$ (1000 – 1500) millones, aportando el 16% del PBI nacional. [1] Según Humberto Palma, presidente de Asociación de Empresas Privadas Metalmecánicas (AEPME) , comentó que el sector mantendrá sus niveles de producción (200.000 tn) y ventas (US$1.000 millones) en el 2014. [2] El desarrollo de la industria metalmecánica en Trujillo es cada vez más notorio. Teniendo así grandes ejemplos como FIANSA, FACTORIA INDUSTRIAL, FAMECA, CONSERMET, etc. [3] Las cuales deberán tener acceso a información y conocimiento de aquellos elementos que hoy en día son una necesidad en la metalmecánica. Siendo el puente grúa uno de estos elementos. [4].
El puente grúa está destinado a suplir la necesidad de cargar objetos de gran peso y dimensión. [5] Siendo una solución eficiente, debido a su alta rentabilidad, bajo costo de mantenimiento, confiabilidad y versatilidad que permite sean adaptadas a cualquie r aplicación y espacio. [6] Los puentes grúa suelen ser objeto de grandes tensiones en su estructura, ya que llevan cargas elevadas. La tensión conduce a las vibraciones no deseadas que producen daños estructurales y reducción de la vida de esta. [7]
En el Perú no existe una normativa específica para el diseño y análisis de edificios industriales, por ello se opta por utilizar Códigos, Normas y Guías Americanas estandarizadas. [9] Los códigos de diseño tienen diferentes enfoques, el diseño por medio del AISC resulta ser más conservador que de la norma CMMA70, la cual involucra valores de menor magnitud para las cargas laterales. [10]
El problema del movimiento de la carga es uno de los problemas fundamentales en la dinámica estructural. Gran cantidad de trabajos se han reportado de la respuesta dinámica de estructuras en el campo de transporte, tales como puentes de ferrocarril, más adelante puentes de carreteras y finalmente varias construcciones como los puentes grúas, bajo la influencia del movimiento cargas. [11]
Actualmente, se desprecian los efectos dinámicos en grúas, debido a la baja velocidad de operación, teniendo en cuenta para el diseño solo los efectos estáticos. Sin embargo, la tasa de producción se elevó con el avance de la tecnología, especialmente para las cargas de los buques en el puerto, en lugares tales como el crecimiento del vaciado rápido, la necesidad de estas va en aumento. [12] Las fallas prematuras de estructura de la grúa para carga de buques se están volviendo más comunes. Aproximadame nte 1,2 millones de grietas se encuentran en el alma de la viga. [13]
produce en la viga principal sometidas a diferentes condiciones de operación. Con el fin de mejorar el rendimiento y el consumo de energía en el puente grúa.
1.1.2. Antecedentes del Problema
En Guayaquil, Ecuador en el 2015. STEVEN ANDRÉS ESPINOZA MENDIETA Y JONATHAN NOÉ LOOR GARCÍA, estudiantes de la Escuela Superior Politécnica del Litoral. Realizaron el trabajo final de graduación en Análisis, Simulación y Optimización de un Puente grúa birráil mediante perforaciones en la viga cajón, para una capacidad de 25 Toneladas métricas con una luz de 24 metros. [14]
En Bali, Indonesia en enero del 2014. MUHAMMAD ABID, SHAHBAZ KHAN M, estudiantes de la Facultad de Ingeniería Mecánica del Instituto GIK de Ciencias y Tecnología de Ingeniería Topi, Swabi, Pakistán. Realizaron la optimizac ió n paramétrica de viga cajón del puente grúa con diferentes luces y capacidad de carga fija. [15]
En la India en julio del 2013, ABHINAY SURATKAR, VISHAL SHUKLA Y DR. K. S. ZAKIUDDIN, estudiantes y docente de la Facultad de Ingeniería Priyadarshini, realizó la Optimización del diseño de viga cajón en puente grúa EOT. [16]
En Venecia, Italia en julio del 2008. ISMAIL GERDEMELI, DERYA OZER E ISMAIL ESEN. En el 8vo Congreso Mundial sobre mecánica computacio na l (WCCM8), realizaron el análisis dinámico de la viga del puente grúas sometidas a cargas en movimiento. [18]
En Turquía, en el 2011. ISMAIL ESEN, docente del Departamento de Ingenier ía Mecánica de la Universidad de Karabük. En el vol.16 N°01 pp. 171-182 de Aplicaciones Matemáticas y computacionales de la Asociación para la investigac ió n científica. Realizó la reacción dinámica de una viga debido a la aceleración de una masa en movimiento usando la aproximación del movimiento con elementos finit os . [19]
En Praga, Republica Checa en septiembre del 2011. AJLA BEĆIROVIĆ, DUŠAN VUKOJEVIĆ, FUAD HADŽIKADUNIĆ. En la 15va Conferencia Internacional de Investigadores/ Expertos. Tendencias en el desarrollo de máquinas, así como de la tecnología. Realizaron la optimización de una viga cajón del puente grúa birráil en función de los parámetros de la sección transversal de la viga cajón. [20]
1.1.3. Formulación del Problema
1.1.4. Justificación de Estudio
a. Justificación Tecnológica
Este proyecto proporcionó a estudiantes de Ingeniería Mecánica y personas interesadas, un recurso bibliográfico acerca del procedimiento para la selección de una viga tipo cajón de un puente grúa.
b. Justificación Institucional
Se promovió metodologías modernas para las infraestructuras de puentes grúa, que brinden soluciones a las necesidades del desarrollo de actividades productivas y fomentando la seguridad en los trabajadores.
c. Justificación Económica
Este proyecto disminuyó retrasos en proceso de producción y en la entrega de productos, y así aumentar la capacidad de producción anual y satisfacer las necesidades del cliente en el tiempo solicitado.
1.1.5. Limitaciones del problema
El desarrollo del presente trabajo abarcó solo para puente grúa de Clase D.
El trabajo de investigación se realizó para puentes grúa con carga de 5 a 30 tn y luces 10 a 30 m.
1.2. OBJETIVOS
1.2.1. Objetivo General
Determinar los valores de los parámetros dimensionales y dinámico estructurales de una viga cajón, de puente grúa birráil con clase D para mejorar las condiciones de operación.
1.2.2. Objetivo Específicos
- Recopilar información de las dimensiones, tipos de carga, servicio, capacidades carga y luz de las vigas.
- Calcular esfuerzos y deformaciones a diferentes condiciones de operación. - Calcular el número de riguidizadores transversales y longitudinales de la
viga cajón.
- Calcular las frecuencias vibración de la viga a diferentes condiciones de operación.
- Calcular las frecuencias excitación de la carga móvil a diferentes condiciones de operación.
- Optimizar el peso especifico de la viga cajón.
CAPÍTULO II: MARCO REFERENCIAL
2.1. PUENTE GRÚA
Un puente grúa es una máquina constituida por diferentes elementos y mecanismos, que tiene como función movilizar cargas dentro del espacio de su rango de acción. [21]
2.1.1. Estructura
A continuación, se detallan componentes típicos de la estructura: [21] 1. Polipasto o carro móvil principal.
2. Viga principal de la grúa. 3. Chapas de unión.
4. Vigas testeras o testeros. 5. Motor de traslación del puente. 6. Mando de control cableado o radio control.
7. Equipamiento eléctrico de la grúa. 8. Equipamiento eléctrico del carro principal.
9. Con interruptor de límite de izado. 10. Con detector de carga.
11. Gancho de amortiguación. 12. Montaje del raíl C.
2.1.2. Clasificación
Monorraíl: Se trata de la versión más económica y óptima para pequeñas cargas o grandes cargas y pequeñas luces. [21]
Figura 2. 2. Puente grúa monorraíl. [21]
Birráil: Los modelos de dos vigas principales se utilizan en estructuras que deben cubrir grandes luces, debido a los grandes esfuerzos que deben soportar, o para grandes cargas en las que es necesario dividir los esfuerzos en más de una viga. [21]
2.1.3. Mecanismos
Mecanismo de traslación del puente: Este realiza el movimiento a lo largo de las vigas principales, es decir a lo largo de la nave. [22]
Mecanismo de elevación de la carga: Este realiza el movimiento de subir o bajar la carga a trasladar. [22]
Mecanismo de traslación del carro: Este realiza el movimiento desplazando el carro a lo ancho de la nave sobre las vigas transversales, es decir a lo largo del puente. [22]
Figura 2. 4. Mecanismos de un puente grúa. [22]
2.1.4. Clase de Servicio
Las clasificaciones del servicio de la grúa, según la Asociación Americana de Fabricantes de Grúa (CMAA), en la norma CMMA #70 son: [23]
velocidades reducidas con períodos largos, ociosos entre las elevaciones se requiere. El levantamiento en la capacidad clasificada se puede hacer para la instalación inicia l del equipo y para el mantenimiento infrecuente. [23]
CLASE B (servicio ligero): Esto cubre las grúas usadas en los talleres de reparaciones, operaciones de asamblea ligeras, edificios de servicio, luz que almacena, o el deber similar, donde están luz y la velocidad los requisitos del servicio es lento. Las cargas pueden variar de ninguna carga a cargas clasificadas completas ocasionales, con 2 - 5 elevaciones por hora. [23]
CLASE C (servicio moderado): Esto cubre las grúas usadas en tiendas de máquina o cuartos de la máquina del molino de papel, donde los requisitos son moderados. Las grúas manejarán las cargas con las cuales haga un promedio de 50% de la capacidad clasificada, con 5 - 10 elev/hora, no sobre 50% de las elevaciones en la capacidad clasificada. [23]
CLASE E (servicio severo): Esto requiere las grúas capaces de manejar las cargas que se acercan a la capacidad clasificada a través de su vida. Los usos pueden incluir el imán, cubo, y las grúas de la combinación del imán-cubo para las yardas del desecho, los molinos del cemento, los molinos de la madera de construcción, las plantas del fertilizante, envase que dirige, o similar, con 20 o más las elevaciones/hora, o cerca de la capacidad clasificada. [23]
CLASE F (servicio continuo severo): Esto requiere las grúas capaces de manejar las cargas que se acercan a capacidad clasificada continuamente bajo condiciones severas del servicio a través de su vida. Los usos pueden incluir las grúas creadas para requisitos particulares de la especialidad esenciales para la ejecución de las tareas de trabajo críticas que afectan a las instalaciones de producción totales. Estas grúas deben proporcionar la confiabilidad más alta, con especial atención a la facilidad de las características del mantenimiento. [23]
2.1.5. Clase de Carga
L1 = Grúas que rara vez elevan cargas iguales a la carga nominal, pero normalme nt e
elevan cargas muy ligeras. [14]
L2 = Grúas que rara vez elevan cargas iguales a la carga nominal, pero normalme nt e
elevan cargas de alrededor de 1/3 de la carga nominal. [14]
L3 = Grúas que elevan cargas iguales a la carga nominal con bastante frecuencia, y
normalmente elevan cargas entre 1/3 y 2/3 de la carga nominal. [14]
2.1.6. Ciclo de Carga
N1 = 20000 a 100000 ciclos. [14]
N2 = 100000 a 500000 ciclos. [14]
N3 = 500000 a 2000000 ciclos. [14]
N4 = mayor a 2000000 ciclos. [14]
Clase de Carga
Ciclos de Carga k=factor de carga efectiva
N1 N2 N3 N4
L1 A B C D 0.35-0.53
L2 B C D E 0.531-0.67
L3 C D E F 0.671-0.85
L4 D E F F 0.851-1.00
Uso ocasional irregular seguido por largos períodos de inactividad Uso regular en operación intermitente Uso regular en operación continua Uso regular en operación continua severa
Tabla 2. 1. Clase de servicio en términos de carga y ciclos de carga. [14]
2.2. PESO METÁLICO DE LAS CONSTRUCCIONES
El peso es un índice importante de la máquina. Tiene sobre todo gran importancia en la construcción de maquinaria de transporte y, particularmente, en aviación, donde cada kilogramo sobrante disminuye la capacidad de elevación útil, la velocidad y el alcance de acción. En la construcción de maquinaria general, la disminución del peso de las máquinas significa la reducción del consumo de metal y del coste de la fabricación.
nacional del metal. Pero esto no libera de la necesidad de conseguir la máxima disminución del peso de las máquinas de producción pequeña y por unidades, ya que su producción total puede componer en general una parte considerable de toda la producción de maquinaria.
Hay que hacer restricción de que la disminución del peso de la construcción no es un objetivo propio incondicional. Los gastos en el material componen en general una parte insignificante de la suma de los gastos durante todo el tiempo de explotación de la máquina, cuya magnitud depende fundamentalmente de la fiabilidad y longevidad de ésta. Si la disminución del peso está vinculada con el peligro de que baje la resistencia mecánica, la rigidez y la fiabilidad de la máquina, entonces suele ser racional, particularmente, en la construcción de maquinaria general, que se contenga la tendencia a disminuir el peso. Vale más tener una máquina algo pesada que ligera, pero no fiable y de poca longevidad.
Las cualidades ponderales comparativas de las máquinas de igual designación esta aceptado valorizarlas por el índice del peso específico, que representa el cociente de la división del peso G de la máquina por el parámetro fundamental de la máquina. Para las máquinas generadoras de energía tal parámetro es la potencia N. El peso específico de tales máquinas es:
2.3. RIGIDEZ DE LAS CONSTRUCCIONES
La rigidez es uno de los factores fundamentales que determinan la capacidad de trabajo de la construcción y tiene tanta importancia, si no más, para fiabilidad, como la resistencia mecánica. Las deformaciones elevadas pueden alterar el trabajo normal de la construcción mucho antes de que surjan tensiones peligrosas para la resistencia mecánica. Alterando la distribución uniforme de la carga, ellas provocan la concentración de esfuerzos en distintos sectores de las piezas, como resultado de lo cual aparecen altas tensiones locales que sobrepasan en mucho la magnitud de las tensiones nominales. La falta de rigidez de los cuerpos pertuba la interacción la interacción de los mecanismos dispuestos en estos, provocando un elevado rozamiento y desgaste de las articulaciones móviles.
La rigidez es la capacidad del sistema de resistir la acción de las cargas exteriores con las mínimas deformaciones. Para la construcción de maquinaria puede formularse la siguiente definición: la rigidez es la capacidad del sistema de resistir la acción de las cargas exteriores con las deformaciones, admisibles sin alterar la capacidad de trabajo del sistema. Para las construcciones de maquinaria, la rigidez es la que mayor importancia. La rigidez se aprecia por el coeficiente de rigidez, que representa la relación de la fuerza P, aplicada al sistema, a la deformación máxima f provocada por esta fuerza. Para el caso de flexión de una barra de sección constante por su longitud, el coeficiente de rigidez es:
2.4. ANÁLISIS ESTRUCTURAL DE VIGA PRINCIPAL
2.4.1. Viga Principal
2.4.1.1. Vigas Armadas
Son estructuras en el cual la viga es generalmente de secciones compuestas o prefabricadas por la unión de planchas o perfiles laminados de acero, utilizados para soportar mayores capacidades de carga y/o salvar luces importantes. La sección compuesta puede ser mediante la unión de dos perfiles laminados.
Figura 2. 5. Unión de dos perfiles con soldadura. [5]
También se construyen las secciones mediante planchas metálicas unidas mediante soldadura.
2.4.1.2. Perfiles Laminados
Se utilizan perfiles laminados como vigas para soportar importantes y variadas cargas que actúan sobre las mismas. Los más utilizados son: I rectangular de patín ancho (IR), o estándar americanos (IE) o los perfiles soldados (IS). [5]
Figura 2. 7. Perfiles laminados tipo I. [5]
2.4.2. Tipos de Cargas
Las cargas que actúan sobre la viga. Según la norma CMAA #70 son:
2.4.2.1. Cargas Principales
Carga Muerta (DL): Corresponde al peso de toda la estructura de la grúa, y maquinaria y equipo que este fijado a ella. [10]
Carga del Trolley (TL): Consiste al peso del trolley y todo el equipo de esté. [10]
Carga de izaje (LL): Es la carga de trabajo y el peso de los mecanismos para levantar la carga tales como el bloque de carga, balde y magneto. [10]
la carga. Estas cargas adicionales pueden ser incluidas de manera simplificada por la aplicación de un factor para carga muerta (DLF) y otro para carga de izaje (HLF), debido a la carga vertical actuante. [10]
Factor por carga muerta (DLF): Este factor cubre solo la carga muerta de la grúa, el trolley y sus partes anexas.
DLF = 1.1 ≤ 1.05 + travel speed (FPM)⁄2000≤ 1.2 (2.3)
Factor por carga de izaje (HLF): Este factor se aplica por el movimie nto vertical que experimenta la carga de nominal de izaje, cubre fuerzas de inercia, fuerzas de masa debido al repentino izaje de la carga y cualquier incertidumbre.
HLF = 0.15 ≤ 0.005×hoist speed (FPM) ≤ 0.5 (2.4)
Fuerzas de Inercia de unidades motrices (IFD): Se dan durante la aceleración o desaceleración de los movimientos de las grúas y dependen de los pares de marcha y de frenado aplicadas por las unidades de transmisión y los frenos durante cada ciclo. La carga lateral debido a la aceleración o desaceleración debe ser un porcentaje de la carga vertical, considerado como 7.8 veces la aceleración o des-aceleración nominal (ft/seg2), pero que no sea menor del 2.5% de la carga vertical.
[10]
2.4.2.2. Cargas Adicionales
como 5 lbf/ft2 en la proyección del área expuesta al viento. En superficies múltip les
que están expuestas al viento, tales como la viga principal, donde la distancia horizontal entre superficies es mayor que la profundidad de la viga, el área expuesta al viento debe ser considerada como 1.6 veces el área proyectada de la viga principal. [10]
Cargas de Desgaste (SK): Al tener dos ruedas girando a lo largo del riel, las fuerzas horizontales, perpendiculares al riel que tienden a desgastar la estructura, deben ser tomadas en consideración. Las fuerzas horizontales se obtienen de multiplicar la carga vertical ejercida en cada rueda, por el coeficiente Ssk, el cual depende de
la relación entre el claro del puente con la distancia entre ejes de las ruedas. [10]
Figura 2. 8. Gráfico para obtener coeficiente Ssk. [10]
2.4.2.3. Combinación de Cargas
Caso#1 (Cargas principales)
DL(DL𝐹𝐵) + 𝑇𝐿(DL𝐹𝑇) + 𝐿𝐿(1 + 𝐻𝐿𝐹) + 𝐼𝐹𝐷 (2.5)
Caso #2 (Cargas Principales + cargas adicionales)
DL(DL𝐹𝐵) + 𝑇𝐿(DL𝐹𝑇) + 𝐿𝐿(1 + 𝐻𝐿𝐹) + 𝐼𝐹𝐷 + 𝑊𝐿𝑂+ 𝑆𝐾 (2.6)
2.4.3. Esfuerzos y Deformaciones
2.4.3.1. Consideraciones Geométricas
Las dimensiones en la viga principal son las siguientes : [7] 1 = Diafragma principal.
2 = Diafragma auxiliar. H = Altura de la viga.
H1 = Altura de la sección
transversal del soporte. c = Longitud chaflán.
bp = Ancho del ala.
δc = Espesor del alma.
δp = Espesor del ala.
a = Diafragma principal.
a1 = Distancia diafragma auxiliar.
H = [1
16÷
1
20] L (2.7)
H1 = [0.3 ÷ 0.6]H (2.8) 𝑐 = [0.1 ÷ 0.2]L (2.9) 𝑏𝑝 = [0.55 ÷ 0.33]H (2.10)
𝛿𝑐 = H
180 ÷240 (2.11)
El momento de inercia de la sección principal de la viga en el eje horizontal x-x y el eje vertical Y-Y, respectivamente, son los siguientes:
𝐼𝑥𝑥 = 1
6[𝛿𝑐𝐻𝑜
3+ (𝑏
𝑝+ 2𝛿𝑐)𝛿𝑝3+ 3𝛿𝑝(𝑏𝑝+ 2𝛿𝑐)(𝐻𝑜+ 𝛿𝑝)
2
] (2.12)
𝐼𝑦𝑦 = 1
6[𝛿𝑝(𝑏𝑝+ 2𝛿𝑐)
3
+ 𝐻𝑜𝛿𝑐3+ 3𝛿
𝑐𝐻𝑜(𝑏𝑜+ 𝛿𝑐)2] (2.13)
El módulo resistente de la viga es:
𝑆𝑥𝑥 = 2𝐼𝑥𝑥
(𝐻𝑜+2𝛿𝑝) (2.14)
𝑆𝑦𝑦 = 2𝐼𝑦𝑦
(b𝑝+2𝛿𝑐) (2.15)
2.4.3.2. Tensiones debidas a la Flexión
Consideremos una viga de sección rectangular y los diagramas de esfuerzos de la Figura 2.10 para estudiar los esfuerzos de flexión. [24]
La comprobación de la sección de la viga a flexión, se hace mediante expresión: [25]
σ = M
𝑆𝑥 ≤ 𝜎𝑎𝑑𝑚 (2.16)
Sx = Módulo resistente de la viga
El esfuerzo cortante en el alma, en general, tiene poca importancia, ya que en escasas ocasiones sobrepasan los valores admisibles: [25]
τ = Q
F𝑎𝑙𝑚𝑎 ≤ 𝜏𝑎𝑑𝑚 (2.17)
Falma = Sección del alma del perfil
Esfuerzo de corte tenía poca influencia en las vigas metálicas, como consecuencia de que, en el eje neutro son máximas las tensiones tangenciales y se anulan las tensiones normales debidas a la flexión. Lo expresado anteriormente pierde vigencia, cuando, por ejemplo, cuando tenemos una viga I (Fig. 2.11) de poca luz y de gran carga. [25]
Cuando en el cálculo se tienen en cuenta las tensiones tangenciales como, por ejemplo, en vigas I, de luz pequeña y muy cargadas. Por consiguiente, es necesario comprobar la tensión equivalente deducida de los estudios de la rotura de los cuerpos sometidos a un estado de tensiones planas, según el criterio de Von Mises dada por la siguiente expresión: [25]
σ𝑒𝑞 = √𝜎2+ 3𝜏2 (2.18)
σ = Tensión normal en el enlace de cabeza y alma en el extremo del alma.
τ = Tensión tangencial en la misma fibra en la que se comprueba σ
2.4.3.3. Criterio de Resistencia
Consistente en comprobar en que en ninguno de sus puntos el material sobrepasa unas tensiones admisibles máximas. [26]
Nivel de esfuerzo y
caso
Esfuerzo de compresión
admisible
Esfuerzo de tensión admisible
Esfuerzo de corte admisible
Esfuerzo en el cojinete
admisible
1 0.60σ𝑦𝑝 0.60σ𝑦𝑝 0.35σ𝑦𝑝 0.75σ𝑦𝑝
2 0.66σ𝑦𝑝 0.66σ𝑦𝑝 0.375σ𝑦𝑝 0.80σ𝑦𝑝
Tabla 2. 2. Esfuerzos admisibles. [27]
2.4.3.4. Criterio de Rigidez
y la carga nominal no será superior a 1/888 de la luz. Fuerzas de inercia verticales no serán consideradas en la determinación de la desviación. [27]
2.4.4. Análisis de Pandeo
Existen varios tipos de miembros que trabajan a compresión, de los cuales la columna es el más conocido. Éstos incluyen los patines a compresión de vigas laminadas y armadas y los miembros sujetos simultáneamente a cargas de flexión y de compresión. Entre más larga sea una columna para una misma sección transversal, mayor es su tendencia a pandearse y menor será la carga que pueda soportar. La tendencia de un miembro a pandearse se mide por lo general con la relación de esbeltez, que se ha define como la relación entre la longitud del miembro y su radio de giro mínimo. [25]
Existen dos modos generales por medio de los cuales pueden fallar columnas cargadas axialmente. Estos son:
2.4.4.1. Pandeo del Miembro
Se caracteriza porque no existe distorsión de la sección de la columna. El pandeo del miembro puede tomar la forma de: [28]
Pandeo por Flexión: Todas las deformaciones por pandeo ocurren en uno de los planos principales de la sección transversal de la columna. En el pandeo por flexió n no ocurre el torcimiento de la sección transversal. [28]
2.4.4.2. Pandeo local de la placa
Se caracteriza porque existe distorsión de la sección de la columna. Una placa rectangular es un elemento estructural plano que se caracteriza por tener sus dimensiones de longitud y de ancho mucho mayores que su espesor. Se apoya en todos sus cuatro extremos y se puede restringir a la flexión a lo largo de alguno o de todos sus bordes. [28]
Figura 2. 12. Placa rectangular sujeta a carga. [28]
La tensión crítica ideal de abolladura de uno de estos rectángulos sometidos a tensiones normales y tensiones tangenciales, en dos de sus bordes opuestos es: [30] σ𝑐𝑟.𝑖 = 𝐾1𝜎𝐸 (2.19) τ𝑐𝑟.𝑖 = 𝐾2𝜎𝐸 (2.20) K1 y K2 = Coeficientes de abolladura que se obtienen de la tabla 2.3, en funció n
del tipo de las tensiones en los bordes del rectángulo y de la relación. [30]
α = 𝑑
ℎ𝑎 (2.21)
𝜎𝐸 = 𝜋2∙𝐸
12 (1−𝑣2)∙ (
𝑒
ℎ𝑎)
2
(2.22) σE= Tensión crítica de Euler dada por [kg/cm2]
El módulo de elasticidad y la relación de poisson para el acero respectivame nte son: 𝐸 = 2.1 ∙ 106𝑘𝑔/𝑐𝑚2 y 𝑣 = 0.3 , Resulta: [30]
𝜎𝐸 = 189.8. 104∙ (𝑒
ℎ𝑎)
2
(2.23) Cuando sobre un rectángulo actúen simultáneamente tensiones normales cuyo valor máximo en compresión es 𝜎1∗ y tensiones tangenciales de valor 𝜏∗, se
calculará una tensión de comparación ideal de abolladura 𝜎𝑐𝑜.𝑖 cuyo valor viene dado por: [30]
𝜎𝑐𝑜.𝑖 = √𝜎1∗2+3∙𝜏∗2
1+𝜓 4 ∙ 𝜎1∗ 𝜎𝑐𝑟.𝑖+√( 3−𝜓 4 ∙ 𝜎1∗ 𝜎𝑐𝑟.𝑖) 2 +(𝜏∗ 𝜏𝑐𝑟.𝑖)
2 (2.24)
Donde:
𝜏∗ = Tensiones tangenciales máxima. 𝜓 = Indicado en la tabla 2.3
Tabla 2. 3. Valores de los coeficientes “K” de abolladura. [27]
2.4.4.3. Rigidizadores
En aquellas vigas cuya altura “ha" del alma es elevada, no es suficiente la
Figura 2. 13. Rigidizadores longitudinales y transversales. [30]
Rigidizadores Transversales: El momento de inercia de un rigidizador transversal, para que pueda considerarse como ultrarrígido deberá cumplir la condición: [30]
𝐼𝑅 ≥ 1.5 ∙ (ℎ𝑎
50)
4
(2.25) Este momento de inercia deberá tomarse respecto a un eje contenido en el plano de simetría del alma.
Rigidizadores Longitudinales: El momento de inercia medido respecto al plano de simetría del alma, de un rigidizador longitudinal, para que pueda considerarse como ultrarrígido debe cumplir la condición:
𝐼𝑅 ≥ ℎ𝑎𝑒3(2.4𝛼2− 0.13) (2.26) Donde:
α = 𝑑
ℎ𝑎 (2.27)
2.5. ANÁLISIS DINÁMICO DE VIGA PRINCIPAL
2.5.1. Fundamentos de Vibraciones
2.5.1.1. Vibración
Cualquier movimiento que se repite después de un intervalo de tiempo. La teoría de la vibración tiene que ver con el estudio de los movimientos oscilatorios de los cuerpos y las fuerzas asociadas con ellos.
Cantidad de Grados de libertad: El mínimo de coordenadas independie ntes requerido para determinar por completo todas las partes de un sistema en cualquier instante de tiempo. [31]
Figura 2. 14. Cantidad de grados de libertad. [31]
Figura 2. 15. Viga en voladizo con infinitos grados de libertad. [31]
2.5.1.2. Clasificación de la Vibración
La vibración se puede clasificar de varias maneras. Algunas de las clasificacio nes importantes son las siguientes: [31]
Vibración Libre: Si se deja que un sistema vibre por sí mismo después de una perturbación inicial. Ninguna fuerza externa actúa en el sistema. [31]
Vibración Forzada: Si un sistema se somete a una fuerza externa (a menudo, una fuerza repetitiva). La oscilación que aparece en máquinas como motores diesel es un ejemplo de vibración forzada. Si la frecuencia de la fuerza externa coincide con una de las frecuencias naturales del sistema, ocurre una condición conocida como resonancia, y el sistema sufre oscilaciones peligrosamente grandes. [31]
2.5.1.3. Movimiento Armónico
periódico es el movimiento armónico. Aunque el movimiento armónico es más simple de manejar, el movimiento de muchos sistemas vibratorios es no armónico. Sin embargo, en muchos casos las vibraciones son periódicas. Por suerte, cualquier función de tiempo periódica puede ser representada por la serie de Fourier como una suma infinita de términos seno y coseno. [31]
𝑥 = 𝐴 sin 𝜔𝑡 (2.28) La velocidad de la masa m en el instante t la da:
𝑑𝑥
𝑑𝑡 = 𝜔𝐴 cos 𝜔𝑡 (2.29)
𝑑2𝑥
𝑑𝑡2 = −𝜔
2𝐴 sin 𝜔𝑡 = −𝜔2𝑥 (2.30)
Se ve que la aceleración es directamente proporcional al desplazamiento. Una vibración como esa, con la aceleración proporcional al desplazamiento y dirigida hacia la posición media, se conoce como movimiento armónico simple. [31]
2.5.2. Vibración de vigas
2.5.2.1. Mecánica de Solidos
Figura 2. 16. Deformación de una viga sometida a momentos en los extremos. [32]
𝑀 = 𝐸𝐼𝜕2𝑤
𝜕 𝑥2 (2.31)
Por lo tanto, la magnitud del momento de flexión es proporcional a la segunda derivada espacial del desplazamiento de la viga. La afirmación de que el momento de flexión es linealmente proporcional a la segunda derivada espacial del desplazamiento de la viga es la ley de Bernoulli-Euler. [32]
La ecuación 2.31 se obtiene considerando sólo los efectos de los momentos en los extremos de la viga. Si, además, hay una carga transversal 𝑓(𝑥, 𝑡), entonces hay fuerzas de cizallamiento verticales dentro de la viga que se resisten a esta fuerza. [32]
𝑀 + (𝑉 + ΔV)Δx = M + ΔM (2.32) lo que lleva a:
Δ𝑀
Δ𝑥 = 𝑉 + Δ𝑉 (2.33)
Figura 2. 17. Deformación de una viga sometida a carga transversal. [32] Después de hacer uso de la ecuación 2.31 tenemos:
𝑉 =∂𝑀
∂𝑥 =
𝜕
𝜕𝑥(𝐸𝐼
𝜕2𝑤
𝜕 𝑥2) (2.34)
2.5.2.2. Ecuación de la viga caso general
Este sistema consiste en una carga transversal externa f (x, t), que para los fines de generalidad se supone que se compone de una carga conservadora y una carga no conservativa. Donde la parte conservadora es debido a la carga de la gravedad. La carga debido a la base de la cimentación con rigidez kf por unidad de longitud es
una carga conservadora, y, por conveniencia, la carga debida a la carga axial P (x, t) se supone que es una carga conservadora. [32]
En el límite izquierdo, hay un resorte de traslación lineal con rigidez k1 y un resorte
de torsión lineal con rigidez kt1 similar, en el límite derecho, hay un resorte de
traslación lineal con rigidez k2 y un resorte de torsión lineal con rigidez kt2.
También hay una inercia elemento con la masa M1 y la inercia rotatoria J1 para el
límite izquierdo y un elemento de inercia con la masa M2 y la inercia rotatoria J2
para la frontera derecha. También hay amortiguadores viscosos lineales con coeficientes de amortiguación c1 para x = 0 y c2 en x = L, respectivamente. La
ecuación que rige para la viga que se muestra en la Figura 2.18. [32]
𝜕2
𝜕𝑥2(𝐸𝐼(𝑥)
𝜕2𝑤
𝜕𝑥2) −
𝜕
𝜕𝑥(𝑝(𝑥, 𝑡)
𝜕𝑤
𝜕𝑥) + 𝑘𝑓𝑤(𝑥, 𝑡) + 𝜌𝐴(𝑥)
𝜕2𝑤
𝜕 𝑡2 = 𝑓(𝑥, 𝑡) (2.35)
Donde:
𝑓(𝑥, 𝑡) = 𝑓𝑐(𝑥, 𝑡) + 𝑓𝑛𝑐(𝑥, 𝑡) (2.36) Si la carga gravitacional es la única carga conservadora actúan sobre el sistema, la carga transversal f (x, t) se escribe como: [32]
𝑓(𝑥, 𝑡) = 𝜌(𝑥)𝐴(𝑥)𝑔 + 𝑓𝑛𝑐(𝑥, 𝑡) (2.37)
Por otra parte, la carga conservadora debido a la gravedad es una carga estática; es decir, una carga independiente del tiempo. Si amortiguación distribuida está presente, donde el coeficiente de amortiguación asociada es c, a continuación, una forma posible de esta fuerza no conservativa es: [32]
𝑓𝑛𝑐(𝑥, 𝑡) = −𝑐𝜕𝑤
Vibración Lateral General
Suponemos que la viga es homogénea y que tiene una sección transversal unifor me a lo largo de su longitud. [32]
𝐸𝐼(x) = EI, ρ(x) = ρ y A(x) = 𝐴 (2.39) Si suponemos que la carga axial está ausente y que la base elástica no está presente; es decir: [32]
𝑝(𝑥, 𝑡) = 0 y 𝑘𝑓 = 0 (2.40) Las condiciones de contorno simplifican en consecuencia. El efecto de la carga axial y la base elástica en las oscilaciones libres de las vigas se considera vigas con secciones transversales variables. A la luz de los supuestos dados por las ecuaciones. (2.39), (2.40) y la ecuacion (2.35) se reduce a: [32]
𝐸𝐼𝜕4𝑤
𝜕 𝑥4 + 𝜌𝐴
𝜕2𝑤
𝜕𝑡2 = 𝑓(𝑥, 𝑡) (2.41)
Vibración Lateral Libre
Para vibración libre, f (x,t) = 0 y por consiguiente la ecuación de movimiento se escribe como: [31]
𝑐2 𝜕4𝑤
𝜕𝑥4 +
𝜕2𝑤
𝜕𝑡2 = 0 (2.42)
𝑐 = √𝜌𝐴𝐸𝐼 (2.43)
única para w(x,t). Los valores de desplazamiento lateral y velocidad se suelen especificar como w0(x) y ẇ0(x) en el instante t =0, de modo que las condiciones
iniciales son: [31]
𝑤(𝑥, 𝑡 = 0) = 𝑤𝑜(𝑥)
𝜕𝑤
𝜕𝑡 (𝑥, 𝑡 = 0) = 𝑤̇0(𝑥) (2.44)
La solución de vibración libre se determina con el método de separación de variables como: [31]
𝑤(𝑥, 𝑡) = 𝑊(𝑥)𝑇(𝑡) (2.45) Sustituyendo la ecuación (2.44) en la (2.41) y reordenando se llega a [31]
𝑐2
𝑊(𝑥)
𝑑4𝑊(𝑥)
𝑑𝑥4 = −
1 𝑇 (𝑡)
𝑑2𝑇(𝑡)
𝑑𝑡2 = 𝑎 = 𝜔
2 (2.46)
Donde a=ω2 es una constante positiva. La ecuación (2.46) se puede escribir como
dos ecuaciones: [31]
𝑑4𝑊(𝑥)
𝑑𝑥4 − 𝛽
4𝑊(𝑥) = 0 (2.47)
𝑑2𝑇(𝑡)
𝑑𝑡2 + 𝜔
2𝑇(𝑡) = 0
(2.48) Donde
𝛽4 = 𝜔2
𝑐2 =
𝜌𝐴𝜔2
𝐸𝐼 (2.49)
La solución de la ecuación (2.48) se puede expresar como
𝑇(𝑡) = 𝐴𝑐𝑜𝑠𝜔𝑡 + 𝐵𝑠𝑒𝑛𝜔𝑡 (2.50)
𝑊(𝑥) = 𝐶𝑒𝑠𝑥 (2.51) Donde C y s son constantes, y derive la ecuación auxiliar como [31]
𝑠4 − 𝛽4 = 0 (2.52) Las raíces de esta ecuación son [31]
𝑠1,2= ±𝛽, 𝑠3,4 = ±𝑖𝛽 (2.53) De ahí que la solución de la ecuación (2.47) sea: [31]
𝑊(𝑥) = 𝐶1𝑒𝛽𝑥+ 𝐶
2𝑒−𝛽𝑥 + 𝐶3𝑒𝑖𝛽𝑥+ 𝐶4𝑒−𝑖𝛽𝑥 (2.54)
Donde C1, C2, C3 yC4 son constantes. La ecuación (2.54) tambien se expresa como
𝑊(𝑥) = 𝐶1𝑐𝑜𝑠𝛽𝑥 + 𝐶2𝑠𝑒𝑛𝛽𝑥 + 𝐶3𝑐𝑜𝑠ℎ𝛽𝑥 + 𝐶4𝑠𝑒𝑛ℎ𝛽𝑥 (2.55)
𝑊(𝑥) = 𝐶1(𝑐𝑜𝑠𝛽𝑥 + 𝑐𝑜𝑠ℎ𝛽𝑥) + 𝐶2(𝑐𝑜𝑠𝛽𝑥 − 𝑐𝑜𝑠ℎ𝛽𝑥) +
𝐶3(𝑠𝑒𝑛𝛽𝑥 + 𝑠𝑒𝑛ℎ𝛽𝑥) + 𝐶4(𝑠𝑒𝑛𝛽𝑥 − 𝑠𝑒𝑛ℎ𝛽𝑥) (2.56) Donde C1, C2, C3 yC4 en cada caso, son constantes diferentes. Las constantes C1,
C2, C3 yC4 se determinan a partir de las condiciones límite. Las frecuenc ias
naturales de la viga se calculan según la ecuación (2.49) como [31]
𝜔 = 𝛽2√𝐸𝐼
𝜌𝐴 = (𝛽𝑙)
2√ 𝐸𝐼
𝜌𝐴𝑙4 (2.57)
La función W(x) se conoce como modo normalo función característica de la viga y ω se conoce como frecuencia natural de vibración. Para cualquier viga habrá una infinitud de modos normales con una frecuencia natural asociada a cada modo normal. Las constantes desconocidas C1 a C4 en la ecuación (2.55) o (2.56) y el
Las condiciones límite comunes son las siguientes: [31] 1. Extremo libre:
Momento Flexión = 𝐸𝐼𝜕2𝑤
𝜕𝑥2 = 0 (2.58)
Fuerza cortante = 𝜕
𝜕𝑥(𝐸𝐼
𝜕2𝑤
𝜕 𝑥2) = 0 (2.59)
2. Extremo simplemente apoyado (de pasador)
Deflexión = 𝑤 = 0, Momento Flexión = 𝐸𝐼𝜕2𝑤
𝜕 𝑥2 = 0 (2.60)
3. Extremo fijo (empotrado)
Deflexión = 0, Pendiente =𝜕𝑤
𝜕𝑥 = 0 (2.61)
![Tabla 2. 1. Clase de servicio en términos de carga y ciclos de carga. [14]](https://thumb-us.123doks.com/thumbv2/123dok_es/7039892.313323/34.918.197.814.314.670/tabla-clase-servicio-términos-carga-ciclos-carga.webp)
![Figura 2. 9. Vista parcial de la viga principal y la sección transversal. [7]](https://thumb-us.123doks.com/thumbv2/123dok_es/7039892.313323/41.918.222.774.447.994/figura-vista-parcial-viga-principal-sección-transversal.webp)
![Figura 2. 16. Deformación de una viga sometida a momentos en los extremos. [32]](https://thumb-us.123doks.com/thumbv2/123dok_es/7039892.313323/53.918.295.736.190.423/figura-deformación-viga-sometida-momentos-extremos.webp)