, México a
de 20
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE
MONTERREY
PRESENTE.-Por medio de la presente hago constar que soy autor y titular de la obra
, en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto
Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que
efectúe la divulgación, publicación, comunicación pública, distribución,
distribución pública y reproducción, así como la digitalización de la misma, con
fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la
comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a
otorgarme el crédito correspondiente en todas las actividades mencionadas
anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la
edición y en general cualquier parte de LA OBRA son de mi entera
responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a
los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad
relacionada con la OBRA que cometa el suscrito frente a terceros.
Efectos de la Movilidad en la Conectividad de Redes Móviles
Ad Hoc (MANET's)-Edición Única
Title
Efectos de la Movilidad en la Conectividad de Redes
Móviles Ad Hoc (MANET's)-Edición Única
Authors
Calos Alberto Gómez González
Affiliation
Tecnológico de Monterrey, Campus Monterrey
Issue Date
2011-12-01
Item type
Tesis
Rights
Open Access
Downloaded
18-Jan-2017 13:19:40
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
C A M P U S MONTERREY
PROGRAMA DE GRADUADOS EN ELECTR
Ó
NICA,
COMPUTACIÓN, INFORMACIÓN Y COMUNICACIONES
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
TECNOLÓGICO
DE MONTERREY
EFECTOS DE LA MOVILIDAD EN LA CONECTIVIDAD DE
REDES M
Ó
VILES AD HOC (MANET's)
TESIS
PRESENTADO C O M O CUMPLIMIENTO PARCIAL DE LOS
REQUISITOS PARA EL GRADO DE:
MAEST
RÍ
A EN CIENCIAS EN INGENIERÍA
EN ELECTR
Ó
NICA
ESPECIALIDAD EN TELECOMUNICACIONES
CARLOS ALBERTO GÓMEZ GONZÁLEZ
I N S T I T U T O T E C N O L Ó G I C O Y D E E S T U D I O S S U P E R I O R E S D E M O N T E R R E Y
C A M P U S M O N T E R R E Y
P R O G R A M A D E G R A D U A D O S E N E L E C T R Ó N I C A , C O M P U T A C I Ó N , I N F O R M A C I Ó N Y C O M U N I C A C I O N E S
TECNOLÓGICO
DE MONTERREY
E F E C T O S D E L A M O V I L I D A D E N L A C O N E C T I V I D A D D E R E D E S M Ó V I L E S A D H O C ( M A N E T ' s )
T E S I S
Presentado como c u m p l i m i e n t o parcial de los requisitos p a r a el grado de:
Maestría e n C i e n c i a s en Ingeniería e n Electrónica E s p e c i a l i d a d en Telecomunicaciones
C a r l o s A l b e r t o G ó m e z González
I N S T I T U T O T E C N O L Ó G I C O Y D E E S T U D I O S
S U P E R I O R E S D E M O N T E R R E Y
E S C U E L A D E I N G E N I E R Í A Y T E C N O L O G Í A S D E I N F O R M A C I Ó N
P R O G R A M A D E G R A D U A D O S E N E L E C T R Ó N I C A , C O M P U T A C I Ó N ,
I N F O R M A C I Ó N Y C O M U N I C A C I O N E S
Los miembros del comité de Tesis recomiendan la aceptación de la Tesis de Carlos
Alberto Gómez González como cumplimiento parcial de los requisitos para el grado de
Maestría en Ciencias en:
Ingeniería e n Electrónica
E s p e c i a l i d a d en Telecomunicaciones
Comité de Tesis:
Dr. Cesar Vargas Rosales
Asesor
D r . G e r a r d o A . Castañón A v i l a Sinodal
Dr. José Ramón Rodríguez Cruz
Sinodal
Dr. Gerardo A . Castañón A v i l a
Director de la Maestría en Sistemas Electrónicos y Automatización
E F E C T O S D E L A M O V I L I D A D E N L A C O N E C T I V I D A D D E R E D E S M Ó V I L E S A D H O C ( M A N E T ' s )
Carlos Alberto Gómez González
T E S I S
Presentado como c u m p l i m i e n t o parcial de los requisitos p a r a el grado de:
Maestría e n Ciencias en Ingeniería en Electrónica E s p e c i a l i d a d en Telecomunicaciones
I N S T I T U T O T E C N O L Ó G I C O Y D E E S T U D I O S S U P E R I O R E S D E M O N T E R R E Y
Dedicado a mi Madre, Laura González.
Mujer de éxito que gracias a su ejemplo he llegado hasta donde estoy.
Por todo su amor y apoyo incondicional durante toda mi vida.
A mi Padre, a mi Hermano y a mi Abuela.
EL SEÑOR ES MI PASTOR Y CON
EL NADA ME FALTARÁ.
Reconocimientos
A D i o s , por b r i n d a r m e l a fortaleza necesaria p a r a salir siempre adelante pese a las
dificultades, por colocarme en el camino correcto i l u m i n a n d o cada paso de m i v i d a y
p o r d a r m e salud p a r a lograr mis objetivos, además de su infinita b o n d a d y amor.
A m i madre, por haberme apoyado en todo momento, por cultivar e inculcar ese sabio d o n de l a responsabilidad, por los ejemplos de perseverancia y constancia que l a caracterizan
y que m e h a inculcado siempre, por el valor mostrado p a r a salir adelante y por su amor.
A m i padre, por ser ese amigo que me dio l a v i d a , p o r ser l a voz que me d a serenidad en
momentos de confusión, por su cariño, comprensión, eterna paciencia y apoyo que me
brindó p a r a c u l m i n a r esta etapa de m i carrera profesional.
A m i hermano, por creer en mí, por ser m i amigo y compañero de l a v i d a , por su estímulo,
p o r los momentos v i v i d o s , por alegrarme el corazón compartiendo l a m i s m a sangre.
A m i abuela, quien aún sin saber lo que estudio, comparte las alegrías, las penas y siempre
m e d a palabras de aliento, inculcándome que t o d o lo que sueñe es posible realizarlo.
A M a x i m i l i a n o , compañero y amigo, por el apoyo, a m i s t a d y paciencia, por esos
mo-mentos de convivencia que hicieron esta etapa más fácil de llevar.
A m i asesor de tesis, D r . César Vargas Rosales, p o r los conocimientos invaluables que
me brindó en cada u n a de las reuniones, y sobretodo su paciencia y t i e m p o brindado
p a r a el desarrollo de este trabajo.
A m i s Sinodales, D r . G e r a r d o Castañón y D r . José R . Rodríguez p o r sus valiosos
co-mentarios y sugerencias p a r a el enriquecimiento de este trabajo.
A todos, m i l palabras no bastarían p a r a agradecerles su apoyo, su comprensión y sus
consejos en los momentos difíciles, espero contar siempre con su valioso apoyo, sincero
Resumen
E l i m p a c t o de l a m o v i l i d a d en l a conectividad en las redes móviles ad hoc ( M A N E T ' s )
es de g r a n i m p o r t a n c i a p a r a el diseño de eficiencia y protocolos de l a c a p a de red. S i n
embargo, los estudios realizados hasta ahora, u t i l i z a n modelos de m o v i l i d a d p a r a l a
simulación de M A N E T ' s que son poco realistas o están hechos a m e d i d a p a r a escenarios específicos. P o r lo anterior, el estudio de los efectos de l a movilidad h a sido basado a
métricas particulares p a r a cada uno de los modelos de movilidad.
E n este t r a b a j o , se discute l a i m p o r t a n c i a de l a m o v i l i d a d y su i m p a c t o en l a red.
H e m o s estudiado los efectos de l a m o v i l i d a d en M A N E T ' s utilizando distintas métricas de m o v i l i d a d y conectividad, b a j o distintos patrones de movimiento en los nodos basados
en el m o d e l o de m o v i l i d a d G a u s s - M a r k o v . Además, se presentan los efectos debidos a
parámetros variables como el rango de transmisión, densidad de nodos p o r u n i d a d de
Í
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ndice general
D e d i c a t o r i a v
Reconocimientos v i
R e s u m e n V i l
índice G e n e r a l VIII
índice de Figuras x
índice de C u a d r o s x n
1. Introducción 1
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
1.1. Justificación 1 1.2. Objetivos 2
1.2.1. Objetivos particulares 2
1.3. Contribución 2 1.4. Organización del contenido 3
2. Antecedentes 4
2.1. M o v i l i d a d 4 2.2. M o d e l o s de m o v i l i d a d 4
2.2.1. M o v i l i d a d macroscópica y microscópica 5
2.2.2. Parámetros de desempeño 7 2.3. M o d e l o s de m o v i l i d a d en M A N E T ' s 7
2.3.1. R a n d o m W a y p o i n t M o d e l 8 2.3.2. G a u s s - M a r k o v M o d e l 10 2.3.3. Reference P o i n t G r o u p M o b i l i t y M o d e l ( R P G M ) 11
2.3.4. Geographic Restriction M o d e l 14
3. Descripción del M o d e l o 16
3.1. Descripción del escenario 16
3.2. Métricas 17 3.2.1. Terminología 17
3.2.2. Métricas de movilidad 18 3.2.3. Métricas de conectividad 19
Í
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ndice GeneralzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ix3.3. N o d o s aislados ( N A ) 21 3.4. G r a d o de nodo mínimo ( M N D ) 22
3.5. T i e m p o s de intercontacto ( T I C ) 23 3.6. Desplazamiento cuadrático medio ( M S D ) 24
4. R e s u l t a d o s 25
4.1. Simulación 25 4.1.1. Escenario general 25
4.2. Parámetro de m e m o r i a
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
a 274.3. Métricas de m o v i l i d a d 28
4.3.1. D T D 29 4.3.2. R S 29 4.4. Métricas de conectividad 29
4.4.1. L C 30 4.4.2. L D 31 4.4.3. P A 32 4.5. N A 34 4.6. M N D 36 4.7. T I C 37 4.8. M S D 37 4.9. Interferencia 39
4.9.1. Potencia de transmisión constante ( P T C ) 40 4.9.2. Potencia de transmisión a l vecino más cercano ( P T V C ) 42
4.9.3. Potencia de transmisión a l vecino aleatorio en T ( P T V A f ) . . . . 43
5. Conclusiones 47
5.1. Conclusiones generales 47 5.2. T r a b a j o a futuro 48
A . C u r v a s estimadas de p r o b a b i l i d a d p a r a interferencia. 49
Índice de figuras
2.1. M o d e l o s de m o v i l i d a d macroscópicos y microscópicos, [1] 5 2.2. Categorización de modelos de m o v i l i d a d en redes a d hoc, [2] 8 2.3. M o v i m i e n t o de u n nodo en el R a n d o m Waypoint M o d e l , [2] 9 2.4. M o v i m i e n t o de u n nodo en el R P G M M o d e l con dos cuadros de tiempo, [2], 12
2.5. M a n h a t t a n M o b i l i t y M o d e l , [2] 14
4.1. Efecto
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ping-pong en l a m o v i l i d a d de los nodos por el área de simulaciónd e l i m i t a d a 26 4.2. Escenario del área de simulación con distribución espacial de nodos. . . . 26
4.3. Patrón de m o v i l i d a d con a = 0 27
4.4. Patrón de m o v i l i d a d con a = 0,5 27
4.5. Patrón de m o v i l i d a d con a = 0,9 28
4.6. Patrón de m o v i l i d a d con a = 1 28
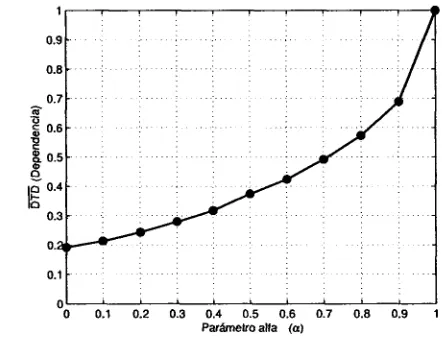
4.7. DTP p a r a p = lOe - 3 29
4.8. RS. (a) p = 2e - 3. (b) p = lOe - 3 30
4.9. LO. (a) p = 2e - 3. (b) p = lOe - 3 31
4.10. LD. (a) p = 2e - 3. (b) p = lOe - 3 31
4.11. Ajuste de distribución de LD p a r a a = 0,1. (a) Ajustes de distintas distribuciones heavy-tail. (b) A j u s t e con distribución E x p o n e n c i a l y W e i b u l l . 32 4.12. A j u s t e de distribución de LD p a r a a = 0,5. (a) Ajustes de distintas
distribuciones heavy-tail. (b) Ajuste con distribución E x p o n e n c i a l y W e i b u l l . 33 4.13. A j u s t e de distribución de LD p a r a a = 0,9. (a) Ajustes de distintas
distribuciones heavy-tail. (b) Ajuste con distribución E x p o n e n c i a l y W e i b u l l . 33
4.14. PA. (a) p = lOe - 3. (b) p = 2e - 3 34
4.15. P r o b a b i l i d a d P(vmin > 0) usando proceso homogéneo de Poisson 35
4.16. P r o b a b i l i d a d P(vmin > 0) con a = 0,5 35 4.17. P r o b a b i l i d a d P{vmin > 0) con a = 0,9 35 4.18. P r o b a b i l i d a d P{vmi„ > 2) usando proceso homogéneo de Poisson 36
4.19. P r o b a b i l i d a d P ( wm¡ „ > 2) con a = 0,5 36
4.20. P r o b a b i l i d a d P(vmin > 2) con a = 0,9 37 4.21. Ajuste de distribución de TIC p a r a r> = 0,1. (a) Ajustes de distintas
distribuciones heavy-tail. (b) A j u s t e con distribución E x p o n e n c i a l con
/ i = 103,7 38 4.22. Ajuste de distribución de TIC p a r a o: = 0,5. (a) Ajustes de distintas
distribuciones heavy-tail. (b) Ajuste con distribución E x p o n e n c i a l con
\i = 102,3 38
4.23. A j u s t e de distribución de TIC p a r a a = 0,9. (a) Ajustes de distintas distribuciones heavy-tail. (b) A j u s t e con distribución E x p o n e n c i a l con
/ i = 85,01 39
Índice de Figuras
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
xi4.24.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
(a) C D F del desplazamiento de u n n o d o desde su posición inicial usandodistintos valores de parámetro
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
a. (b) M S D ( t ) en escala log-log usandodistintos valores de parámetro a 39
4.25. Escenario de interferencia a PTC 41
4.26. Escenario de interferencia a PTC c o n a=0.1 41
4.27. Escenario de interferencia a PTC c o n a=0.5 42
4.28. Escenario de interferencia a PTC c o n a=0.9 42
4.29. Escenario de interferencia a PTVC 43
4.30. Escenario de interferencia a PTVC c o n a=0.1 43
4.31. Escenario de interferencia a PTVC c o n a=0.5 44
4.32. Escenario de interferencia a PTVC c o n a=0.9 44
4.33. Escenario de interferencia a PTVAT 45
4.34. Escenario de interferencia a PTVAT c o n a=0.1 45
4.35. Escenario de interferencia a PTVAT c o n a=0.5 45
4.36. Escenario de interferencia a PTVAT c o n a=0.9 46
A . l . ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nr c o n PTC c o n a=0.1 49
A.2. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nT con PTC c o n a=0.5 50
A.3. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nr c o n PTC c o n a=0.9 50
A.4. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nr con PTVC c o n a=0.1 50
A . 5 . ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nT c o n PTVC c o n a=0.5 51
A.6. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a el nr con PTVC c o n Q=0.9 51
A.7. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nr con PTVAT c o n a=0.1 51 A.8. ( a ) C D F y ( b ) P D F de I ( d B m ) p a r a e l nr con PTVAT c o n a=0.5 52
Índice de cuadros
4.1. Parámetros y valores para escenario de simulación 26
4.2. Parámetros para la simulación de la red 40
"There isn't a person anywhere who isn't capable of doing more than he thinks he
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
can."Capítulo 1
Introducción
L a m o v i l i d a d es importante en el diseño, análisis y evaluación del rendimiento de las re-des móviles a d hoc ( M A N E T ' s ) . Podemos observar cómo l a idea de l a m o v i l i d a d i m p a c t a
en el proceso de decisión en nuestras actividades diarias. L a mayoría de los protocolos
de enrutamiento existentes en M A N E T ' s no consideran l a movilidad en s u decisiones de
ruteo. L a consideración de patrones de m o v i l i d a d mejoran significativamente el r e n d i -miento de protocolos de enruta-miento y cada modelo de movilidad se caracteriza por u n
patrón específico de m o v i l i d a d de los nodos. U n a serie de modelos de m o v i l i d a d están
disponibles en l a literatura, así como también existen diferentes formas de cuantificar
el impacto de l a m o v i l i d a d en las redes, u n a m a n e r a y a conocida es por l a estimación de análisis de l a duración de enlaces y trayectorias. P o r ejemplo, u t i l i z a n d o u n modelo
de m o v i l i d a d específico, es posible estimar el tiempo de duración de u n enlace antes de
que l a comunicación entre dos nodos llegue a u n a r u p t u r a . E s t a duración del enlace, es
u n factor que puede ser u t i l i z a d o para lograr u n a mejor estimación de l a conectividad
de l a red. P o r lo tanto, este t i p o de estimaciones, sin d u d a mejoran el rendimiento de protocolos de enrutamiento.
1.1. Justificación
D e b i d o a que el análisis de las redes ad hoc se h a centrado tradicionalmente en el enrutamiento y el control de acceso al medio, aún es limitado el estudio de los efectos
de m o v i l i d a d utilizando métricas cualitativas y cuantitativas en u n a M A N E T .
H a s t a ahora, el estudio del impacto de l a m o v i l i d a d en M A N E T ' s , se h a sido realizado
utilizando modelos de m o v i l i d a d que no presentan un balance p r o p o r c i o n a l entre l a caracterización del movimiento de nodos y su complejidad analítica. D e esta manera,
Capítulo 1.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Introducción 2el estudio y evaluación de l a r e d , se produce en escenarios que distan de ser realistas
debido a s u simplicidad o y a bien, en escenarios con tareas específicas.
1.2. Objetivos
E s t a investigación tiene como objetivo general estudiar los efectos de l a m o v i l i d a d en u n a
M A N E T , u t i l i z a n d o u n modelo de movilidad flexible, m i s m o que mantenga u n equilibrio
en su c o m p l e j i d a d y trato analítico p a r a definir distintos escenarios de aplicación.
1.2.1. O b j e t i v o s p a r t i c u l a r e s
• Definir u n escenario que logre capturar las características fundamentales y l a t o
-pología de l a M A N E T .
• A p l i c a r u n modelo de m o v i l i d a d , p a r a fines de estudio sobre el i m p a c t o en l a
M A N E T , haciendo uso de distintos parámetros que p e r m i t a n caracterizar distintos
patrones de movilidad.
• R e a l i z a r l a simulación de l a M A N E T , p a r a caracterizar estadísticamente distintas
métricas, tales como: Parámetro de m e m o r i a
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
a, densidad de nodos p o r u n i d a d deárea, grado de dependencia temporal, velocidad relativa, cambios de enlace,
trayec-t o r i a disponible, nodos aislados, grado de nodo mínimo, trayec-tiempos de intrayec-tercontrayec-tactrayec-to
y desplazamiento cuadrático medio.
1.3. Contribución
L a contribución de este t r a b a j o se centra en el estudio de los efectos de l a m o v i l i d a d
sobre l a conectividad de u n a M A N E T , mediante l a evaluación de distintas métricas
aplicadas de acuerdo a u n conjunto de parámetros. Se i m p l e m e n t a u n a l g o r i t m o que
determina las características estadísticas de l a memoria de duración de enlaces y tiempos de interconacto entre los nodos, además de analizar los nodos aislados y grado de nodo
mínimo en l a r e d . D e esta manera, se logra demostrar el i m p a c t o de l a m o v i l i d a d desde
un enfoque particular p a r a distintos patrones de m o v i m i e n t o generados p o r u n modelo
Capítulo 1.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Introducción 31.4. Organización del contenido
E l presente t r a b a j o está organizado por 5 capítulos y 2 apéndices. E l Capítulo 1 c o n
-tiene l a introducción, justificación, objetivos, contribución y esta sección. E l Capítulo
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
2presenta conceptos básicos de las redes móviles ad hoc ( M A N E T ' s ) y l a literatura actual
con respecto a l estudio y aplicación de los modelos de m o v i l i d a d . E l Capítulo 3 define
el escenario, las métricas de m o v i l i d a d y conectividad a evaluar, parámetros de desem-peño, así como también el modelo de m o v i l i d a d G a u s s - M a r k o v p a r a estudiar los efectos
de m o v i l i d a d en l a red. E l Capítulo 4 está dedicado a l a presentación y análisis de los
resultados obtenidos por las métricas definidas p a r a los distintos patrones de m o v i l i d a d
Capítulo 2
Antecedentes
2.1. Movilidad
E n términos generales, l a m o v i l i d a d es l a característica que permite a u n dispositivo o usuario desplazarse de u n punto a otro sin perder conexión en u n a red, [3]. D e este m o d o ,
se elimina l a exigencia de u n punto fijo de conexión a l a r e d y permite a los usuarios l a
habilidad de moverse físicamente al usar sus dispositivos, [4]. L a m o v i l i d a d permite el
acceso a servicios de. comunicación a cualquier hora y lugar donde sea que se encuentre el usuario, [5].
E n [6], son presentados múltiples escenarios de movilidad. 1)
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Movilidad de servicio, sig-nifica u n servicio personalizado a disposición del usuario con u n dispositivo móvil enuna red, que también puede ser accesado p o r otro dispositivo móvil y / o en o t r a red de
diferente región u operador. 2) Movilidad en redes, se refiere a las redes inalámbricas que
soportan l a conexión de dispositivos móviles. Algunas conexiones inalámbricas pueden
estar basadas en u n a arquitectura sin infraestructura, también conocidas como redes móviles a d hoc, en las cuales las redes son físicamente "móviles". 3) Movilidad de
ter-minales, es l a capacidad del dispositivo de u n usuario p a r a moverse dentro de u n a red o
entre redes en curso o siguiendo comunicaciones con accesibilidad. 4) Movilidad de
usua-rio, significa que los usuarios pueden acceder a servicios personales, independientemente de trasladarse a cualquier red o u t i l i z a n d o cualquier t e r m i n a l .
2.2. Modelos de movilidad
Los modelos de movilidad representan el movimiento de usuarios, identificando sus c a m
-bios de ubicación, velocidad y aceleración a lo largo del t i e m p o . L o s esquemas de manejo
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 5de m o v i l i d a d para sistemas de comunicaciones móviles hacen uso de los modelos de mo-v i l i d a d p a r a hacer u n a predicción de l a posición de los usuarios. E n u n a red inalámbrica,
los nodos pueden moverse en muchas maneras diferentes. Los modelos de movilidad son
de uso común para analizar los sistemas de nuevos diseños o protocolos, tanto en redes
celulares como en redes inalámbricas ad hoc.
E n las redes inalámbricas celulares, los estudios de modelos de m o v i l i d a d no sólo tienen
po r objeto describir el comportamiento de movimientos individuales, como los cambios
de dirección y l a velocidad, sino también consideran el movimiento colectivo de todos los
móviles con respecto a u n a zona geográfica (celda) a lo largo del t i e m p o . P o r otro lado,
los modelos de m o v i l i d a d en una red ad hoc, generalmente afectan a el c o m p o r t a m i e n t o
de uno o varios nodos, pero no hay noción del m o v i m i e n t o colectivo con referencia a u n a
celda en particular.
2 . 2
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
. 1 . M o v i l i d a d m a c r o s c ó p i c a y m i c r o s c ó p i c aE n [1], los modelos de m o v i l i d a d pueden ser clasificados en dos clases: macroscópicos y
microscópicos. L o s modelos macroscópicos consideran el desplazamiento de nodos móvi-les (e.g., peatones, vehículos, animamóvi-les) en u n p u n t o amplio, por ejemplo, en el contexto
de grandes áreas geográficas como regiones o celdas adyacentes. P o r otro lado, los
mo-delos microscópicos están diseñados p a r a describir precisamente el m o v i m i e n t o de nodos
individuales, ver F i g u r a 2.1.
E n u n a red celular h a y u n a estación base en el centro de cada celda. L a s llamadas se
originan o terminan en las áreas de servicio de las estaciones base. C u a n d o los usuarios cruzan los límites de u n a celda, ocurre u n hand-off. E n base a l a m o v i l i d a d de los nodos,
diversos temas de investigación han sido dirigidos, tales como, handoff, gestión de u b i
-cación, el registro y t i e m p o de llamada, y el tráfico de carga. Los modelos macroscópicos
son apropiados p a r a este tipo de redes [7].
FIGURA 2.1: Modelos de movilidad macroscópicos y microscópicos, [1].
E l modelo más común es el Random Walk Model, este describe el m o v i m i e n t o relativo
[image:22.612.154.556.286.682.2]CapítulozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 6siguiente posición de forma aleatoria. L a velocidad y dirección se obtienen de m a n e
-r a u n i f o -r m e de los -rangos numé-ricos [V^,¡„, Vmax] y [0,2n] respectivamente, [8]. E x i s t e
también e l Random Gauss-Markov Model. S u modelo incluye el R a n d o m W a l k M o d e l
(totalmente aleatorio) y el C o n s t a n t Velocity M o d e l (cero aleatoriedad) como los dos
casos extremos.
P o r o t r o lado, en las redes inalámbricas ad hoc, los modelos de m o v i l i d a d se centran en
el c o m p o r t a m i e n t o i n d i v i d u a l de m o v i l i d a d en instantes de t i e m p o de u n a simulación,
en l a que u n nodo se mueve en u n a dirección constante a u n a velocidad constante. A diferencia de las redes celulares, las redes reconfigurables (ad hoc) requieren de modelos
de m o v i l i d a d que pertenezcan a ambas clases (macroscópicos y microscópicos). E x i s t e n
dos alternativas p a r a aplicar esta característica. U n a es diseñar modelos de m o v i l i d a d
generales que son considerados como representativos e n muchas situaciones a diferentes escalas. L a o t r a es definir u n modelo de movilidad diferente p a r a cada escenario específico
de m o v i l i d a d (e.g., m o v i l i d a d vehicular vs. peatonal), [1].
E n este t i p o de redes, muchos modelos están basados en el Random Waypoint Model
(RWP), donde a c a d a nodo se le asigna u n a ubicación i n i c i a l aleatoria en u n área unifor-me de simulación, el nodo v i a j a a u n a velocidad constante h a c i a u n destino ( w a y p o i n t ) ,
también elegido de manera aleatoria con distribución uniforme. L a velocidad es u n a
variable aleatoria independiente e idénticamente d i s t r i b u i d a , extraída de u n intervalo
uniforme predefinido. U n a vez en el destino, el nodo puede hacer u n a pausa p o r u n pe-riodo de t i e m p o aleatorio, después de que u n nuevo destino y velocidad son los elegidos,
este proceso se repite hasta que l a simulación se detiene. S i n embargo, este m o d e l o no
tiene m e m o r i a , lo que lleva al peor caso de caracterización en muchos situaciones. D e
hecho, l a velocidad y waypoints son independientes de los valores anteriores, y los nodos se consideran independientes, [7].
P a r a representar el c o m p o r t a m i e n t o colectivo de los nodos, u n a serie de modelos de
m o v i l i d a d de grupos se han propuesto. E l más conocido es el Reference Point Group
Mobility Model (RPGM). P u e s t o que es u n a derivación de l R W P , las limitaciones antes
mencionadas también aplican. A l igual que en el caso de los modelos de m o v i l i d a d
de peatones, se h a n presentado algunas de las propuestas de movilidad de g r u p o p a r a
escenarios específicos, tales como el Column Mobility Model y el Pursue Mobility Model,
[21-D e b i d o a que el R W P no es apto p a r a representar patrones de movimientos complejos,
se h a n propuesto nuevos modelos que reflejan l a m o v i l i d a d en escenarios reales, por ejemplo el City Section y Vehicular Mobility. A u n q u e estos modelos presentan mejoras
en l a caracterización de m o v i l i d a d , siguen mostrando patrones que no se a j u s t a n a las
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 7m o v i l i d a d p a r a calibrar, validar, y obtener nuevos modelos de m o v i l i d a d de seguimiento.
E n [9], se m o d e l a l a m o v i l i d a d de u n a c i u d a d con u n a cadena de M a r k o v con estados
que representan lugares y transiciones c o n l a probabilidad de i r de u n lugar a otro.
2.2.2. P a r á m e t r o s d e d e s e m p e ñ o
C a d a modelo de m o v i l i d a d presenta en particular un conjunto de parámetros de e n t r a d a .
A l variar los valores de estos parámetros, podemos obtener diferentes escenarios de movilidad. D e b i d o a que muchos modelos han sido propuestos, se h a presentado u n
creciente interés por someterlos a u n a comparación. P o r esta razón, es necesario definir
medidas de m o v i l i d a d con las que podemos cuantificar cualquier modelo. E x i s t e n muchos
indicadores que y a son utilizados, s i n embargo, algunos de estos se presentan en l a mayoría de los modelos de m o v i l i d a d .
• Velocidad: Establecer l a velocidad a l a que se mueven los nodos. E s t a puede ser
constante o variable de acuerdo a u n a distribución.
• Número de nodos: T o t a l de número de nodos en movimiento.
• Tiempo de pausa: Condición que se presenta en caso de que los nodos detengan s u
m o v i m i e n t o por u n intervalo de t i e m p o específico.
• Cambio de dirección: Se refiere a l a frecuencia de cambios de dirección de u n n o d o
en movimiento.
• Rango de señal: Máxima distancia entre dos nodos que se consideran apropiados
p a r a establecer comunicación.
2.3. Modelos de movilidad en M A N E T ' s
E n p r i m e r lugar, las redes ad hoc no son fáciles de modelar con trazas, por lo que muchos
modelos intentan representar de m a n e r a realista el comportamiento de los nodos móviles
en u n ambiente ad hoc. Los modelos de movilidad aplicados a u n nodo en p a r t i c u l a r brindan a m p l i a información. S i n embargo, p a r a algunos escenarios, los modelos de g r u p o
son más apropiados. E j e m p l o s como el R W P son generalmente aceptados debido a su
simplicidad. S i n embargo, no son realistas y a que normalmente los usuarios no se mueven
de u n a m a n e r a totalmente aleatoria. P o r lo tanto, un modelo que l i m i t e a l usuario en
una r u t a predefinida utilizando obstáculos es más realista y útil.
P a r a algunos modelos utilizados en redes ad hoc, el comportamiento de un nodo es
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 8m o v i l i d a d , los nodos tienden a viajar de u n a manera correlacionada (dependencia
espa-cial), y finalmente se presentan modelos c o n restricción geográfica, donde el movimiento
de los nodos esta l i m i t a d o p o r calles, carreteras u obstáculos. L a categorización de los modelos esta mostrada e n l a F i g u r a 2.2.
FIGURA 2.2: Categorización de modelos de movilidad en redes ad hoc, [2].
2.3.1. R a n d o m W a y p o i n t M o d e l
E l Random Waypoint Model, es u n punto de referencia de modelos de m o v i l i d a d p a r a
evaluar protocolos de ruteo de las redes inalámbricas ad hoc debido a s u s i m p l i c i d a d
y a m p l i a d i s p o n i b i l i d a d . E n este modelo,
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Vmax y TpaUSa son los parámetros clave que determinan el comportamiento de m o v i l i d a d de los nodos. S i Vmax es pequeña y Tpausa esgrande, l a topología de l a red ad hoc se vuelve relativamente estable. P o r otro lado, si e l
nodo se mueve rápido (i.e., Vmax es grande) y Tpausa es pequeño, l a topología esperada es
altamente dinámica, ver F i g u r a 2.3. C o n l a variación de esos parámetros, especialmente
Vmax, el R W P puede generar varios escenarios de m o v i l i d a d c o n diferentes niveles de
velocidad de los nodos.
Intuitivamente, se puede estimar l a velocidad media de u n nodo. S i podemos asumir que
TpaUsa = 0, considerando eme Vmax se selecciona uniforme y aleatoriamente de [0, Vrnax],
podemos encontrar que l a velocidad m e d i a es 0,5Vmax- S i n embargo, el parámetro de
tiempo de pausa n o debe ser ignorado, y a que l a velocidad relativa de dos nodos es l a
que determina si se establece o rompe u n enlace, [2]. P o r lo tanto, l a velocidad m e d i a
de cada nodo no es l a m e d i d a apropiada para representar l a velocidad de los nodos e n el escenario.
E n [10], se propone u n a medida de m o v i l i d a d para cuantificar l a velocidad de nodos. L a
[image:25.612.171.544.137.364.2]Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 9(2.2) (2.1)
Entonces l a m e d i d a de movilidad M es calculada como l a m e d i d a de l a velocidad m e d i a
relativa sobre t o d o s los nodos pares y durante todo el tiempo. L a definición formal es:
donde es el número de los distintos pares de nodos n es el número t o t a l
de nodos en el escenario de l a simulación (i.e., l a red ad hoc), y T es el tiempo de l a
simulación.
U s a n d o esta m e d i d a de m o v i l i d a d , es posible calcular el nivel de velocidad de nodos
y comparar los diferentes escenarios basados en el nivel de m o v i l i d a d . E n [11], se de-fine o t r a m e d i d a de movilidad de l a velocidad media relativa en u n a manera s i m i l a r .
L o s experimentos muestran que l a velocidad media relativa incrementa linealmente y
monóticamente con l a velocidad máxima permitida.
E s t e modelo y sus variantes están diseñados p a r a i m i t a r el movimiento de nodos de
manera simplificada. Debido a su simplicidad de implementación y análisis, son a m -pliamente aceptados. Sin embargo, estos pueden no ser adecuados p a r a capturar ciertas
características de movilidad de algunos escenarios realistas, incluyendo dependencia t e m
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 102.3.2. G a u s s - M a r k o v M o d e l
E n este modelo, l a velocidad del nodo se asume que esta correlacionada sobre el tiempo y
modelada como u n proceso estocástico G a u s s - M a r k o v , [2]. E n u n escenario de simulación
bidimensional, e l proceso estocástico G a u s s - M a r k o v puede estar representado p o r las
siguientes ecuaciones:
C u a n d o el n o d o v a a viajar más allá de los limites del escenario de l a simulación, l a
dirección d e l m o v i m i e n t o es forzada a girar 180 grados. D e esta manera, los nodos se
mantienen dentro de los límites del escenario.
B a s a d o e n esas ecuaciones, observamos que l a velocidad Vt — [vf,vy}T d e l nodo es
dependiente de l a velocidad Vt-\ = \vt-i,i%-iir • P o r lo tanto, el G a u s s - M a r k o v M o d e l
es u n modelo de m o v i l i d a d de dependencia t e m p o r a l , donde el grado de dependencia
está determinado p o r el nivel de m e m o r i a d e l parámetro a. a es u n parámetro p a r a reflejar l a aleatoriedad del proceso G a u s s - M a r k o v . Ajustando este parámetro, el modelo
es capaz de generar diferentes tipos de comportamiento de m o v i l i d a d en varios escenarios.
1. S i el G a u s s - M a r k o v M o d e l no tiene m e m o r i a (i.e., a = 0), las ecuaciones (2.4) y
(2.5) son
vf = vx +
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
CFX
WX
_1 (2.6)
(2.3)
donde Vt = [vf,vf]T y V J _ i = [^f_i,v|'_i] son l a velocidad a u n tiempo t y t — 1,
respectivamente. Wt = [wf_i,Vt!_i] es el proceso Gaussiano aleatorio no correlacionado
con media cero y varianza a2, y á = [ax,ay]T, v = [vx, vv], y a = [ax,ay]T son los
vectores que representan el nivel de m e m o r i a , media asintótica, y desviación estándar
asintótica, respectivamente.
P o r s i m p l i c i d a d , se representa l a forma general de l a ecuación (2.3) en u n escenario
bidimensional c o m o sigue:
(2.4)
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 11(2.7)
donde l a velocidad d e l nodo p a r a tiempo t esta determinado sólo p o r el cambio de
velocidad fijo V = [vx,vy]T y l a variable aleatoria G a u s s i a n a Wt — [wx-i, wv_1]T.
L a s ecuaciones (2.6) y (2.7) describen el Random Walk Model.
2. S i e l G a u s s - M a r k o v M o d e l tiene fuerte memoria (i.e., a = 1), las ecuaciones (2.4)
y (2.5) son
donde l a velocidad del nodo p a r a tiempo t es exactamente e l mismo que s u
velo-c i d a d previa. E n l a n o m e n velo-c l a t u r a de l a teoría de tráfivelo-co vehivelo-cular, este modelo es
l l a m a d o Fluid Flow Model.
3. S i e l G a u s s - M a r k o v M o d e l tiene algo de memoria (i.e., 0 < a < 1), l a velocidad
p a r a t i e m p o a c t u a l es dependiente tanto de su velocidad Vt-i = [vt-i:vt-i]T Pa r a
t i e m p o ízyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA — 1 como de s u nueva variable aleatoria G a u s s i a n a Wt = [wf_1,'u;¿'_1]r.
E l grado de aleatoriedad es ajustado por e l parámetro de nivel de m e m o r i a a.
C o m o a incrementa, l a velocidad actual será más afectada principalmente p o r s u
velocidad anterior. D e lo contrario, será afectada principalmente p o r l a variable
aleatoria Gaussiana. E n e l G a u s s - M a r k o v M o d e l , l a dependencia t e m p o r a l juega u n r o l clave en l a determinación d e l comportamiento de m o v i l i d a d .
2.3.3. R e f e r e n c e P o i n t G r o u p M o b i l i t y M o d e l ( R P G M )
C o n l a observación de que los nodos en redes inalámbricas ad hoc tienden a coordinar sus movimientos, e l R P G M M o d e l es propuesto. U n ejemplo de t a l m o v i l i d a d es que u n
número de soldados pueden moverse e n u n grupo o formación. O t r o ejemplo es d u r a n t e
el escape de u n desastre, donde varios equipos de rescate (e.g., bomberos, oficiales de
policía, y asistentes médicos) f o r m a n diferentes grupos y t r a b a j a n de forma cooperativa.
E n e l R P G M M o d e l , cada grupo tiene u n centro, el c u a l es u n centro lógico o y a bien u n n o d o líder de grupo. P o r s i m p l i c i d a d , se asume que e l centro es el líder del grupo.
D e esta m a n e r a , cada grupo está compuesto de u n líder y u n número de miembros. E l
m o v i m i e n t o del grupo líder d e t e r m i n a el comportamiento de movilidad del grupo entero, (2.8)
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 12[2}. L a s funciones respectivas del líder de g r u p o y miembros de grupo se describen de l a
forma que sigue.
1. Líder de grupo
E l movimiento del líder de grupo p a r a tiempo t puede ser representado p o r el
m o v i m i e n t o vectorial V^^, además de definir el movimiento del líder de grupo,
también p r o p o r c i o n a u n a tendencia general de movimiento del g r u p o entero. C a d a
m i e m b r o de este grupo se desvía u n cierto grado del movimiento vectorial general
V ^ p o - E s t e movimiento vectorial se selecciona aleatoriamente o a p a r t i r de ciertos
trayectos predefinidos.
FIGURA 2.4: Movimiento de un nodo en el R P G M Model con dos cuadros de tiempo,
[2).
2. Miembros de grupo
E l movimiento de grupo es afectado significativamente por el m o v i m i e n t o del líder de grupo. P a r a cada nodo, l a m o v i l i d a d es asignada con u n p u n t o de referencia
que sigue a l grupo. Sobre este p u n t o de referencia predefinido, c a d a nodo puede
ser colocado aleatoriamente en l a área de simulación. F o r m a l m e n t e , el movimiento
vectorial de u n miembro de grupo i p a r a tiempo t, V ' 0, se puede describir como
donde el m o v i m i e n t o vectorial RM¡ es el vector de desviación aleatoria de u n
miembro de g r u p o i de su punto de referencia. E l vector RM\ es u n proceso
aleatorio independiente e idénticamente distribuido (IID), de m a n e r a uniforme en
el rango [0, rmax] (donde rmax es l a distancia de desviación m á x i m a p e r m i t i d a ) y su dirección es uniformemente d i s t r i b u i d a en el intervalo [0, 2ix\. L a F i g u r a 2.4
[image:29.612.166.534.115.558.2]Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 13ilustra u n ejemplo d e l R P G M M o d e l . E n esta figura, V^^ es e l movimiento
vectorial del líder d e l g r u p o ; que es e l m i s m o para todo el grupo. RM\ es el vector
de desviación a l e a t o r i a p a r a todo el grupo, debido a que también es e l vector de
desviación a l e a t o r i a p a r a el miembro de grupo i, y el vector de m o v i m i e n t o final
del m i e m b r o de g r u p o i esta representado por V*.
C o n l a selección a p r o p i a d a de los trayectos predefinidos para el líder de grupo y
otros parámetros, e l R P G M M o d e l puede generar u n a variedad de c o m p o r t a m i e n
-tos de m o v i l i d a d . P o r ejemplo, puede representar varios escenarios de m o v i l i d a d
incluyendo los siguientes:
o) In-place model: E l área es d i v i d i d a en regiones adyacentes. C a d a región es
exclusivamente o c u p a d a por u n grupo singular. U n ejemplo c o m o t a l es l a
comunicación en u n campo de b a t a l l a .
b) Overlap model: Diferentes grupos c o n diferentes tareas v i a j a n sobre l a m i s m a área en u n a m a n e r a de traslape. E l rescate en u n desastre es u n b u e n ejemplo.
c) Convention model: E s t e escenario simula el comportamiento de m o v i l i d a d en
u n a conferencia. E l área es también d i v i d i d a en varias regiones, y a algunos
grupos se les p e r m i t e viajar entre regiones.
E n el Mobility Vector Framework, u n a extensión del R P G M M o d e l es propuesto.
Se establece que los escenarios de m o v i l i d a d realistas pueden ser modelados y generados apropiadamente, seleccionando checkpoints a lo largo d e l trayecto de
movimiento preferido del líder del grupo.
Si esos checkpoints pueden reflejar el comportamiento del movimiento en escenarios realistas, entonces e l Mobility Vector Model proporciona u n esquema general y
flexible p a r a describir y modelar los patrones de movilidad. S i n embargo, en l a
práctica no es u n a t a r e a t r i v i a l generar esos checkpoints. E n el R P G M M o d e l , el
vector RM¡ d e t e r m i n a indirectamente cuanto se desvían de su líder los miembros del grupo. P o r esta razón, no se pueden generar varios escenarios de m o v i l i d a d con
diferentes niveles de dependencia espacial por el simple ajuste de los parámetros
del modelo. P a r a resolver este problema, u n a versión modificada del R P G M M o d e l
es propuesto, [2]. E l movimiento puede ser caracterizado como sigue:
(2.11)
CapítulozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 14donde 0 < SDR, 1 < ADR, S D R es el Speed D e v i a t i o n R a t i o , y A D R es el A n g l e
D e v i a t i o n R a t i o . S D R y A D R son usados como el control de desviación de l a
velocidad ( m a g n i t u d y dirección) de u n grupo de miembros. A j u s t a n d o estos dos
parámetros, pueden ser generados diferentes escenarios de m o v i l i d a d .
D e b i d o a las características inherentes de l a dependencia espacial entre nodos, del
R P G M M o d e l se espera u n comportamiento diferente a l R a n d o m W a y p o i n t M o d e l ,
en el c u a l incurre en menos r u p t u r a de enlaces y logra u n mejor desempeño p a r a
varios protocolos de enrutamiento.
2.3.4. G e o g r a p h i c R e s t r i c t i o n M o d e l
U n a desventaja del R W P , es l a falta de restricciones en el movimiento de los nodos. Estos
tienen p e r m i t i d o moverse de manera aleatoria en cualquier punto del área de simulación.
[image:31.612.199.482.329.545.2]S i n embargo, en las aplicaciones más realistas, observamos que el m o v i m i e n t o del nodo está sujeto a s u ambiente.
FIGURA 2.5: Manhattan Mobility Model, [2].
E n particular, los movimientos de los vehículos están limitados por carreteras o calles
lo-cales en el área u r b a n a , y en u n a ciudad los peatones pueden ser bloqueados por edificios y otros obstáculos. Además, los nodos se pueden mover de u n a m a n e r a pseudoaleatoria
sobre trayectos predefinidos en un área de simulación. Algunos trabajos recientes hacen
referencia de esta característica e integran los trayectos y obstáculos dentro de los m o
-delos de m o v i l i d a d . E s t e t i p o de modelo de movilidad es también l l a m a d o "modelo de m o v i l i d a d con restricción geográfica'1, [2]. E l Manhattan Mobility Model es u n modelo
Capítulo 2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Antecedentes 15U n a forma sencilla de integrar restricciones geográficas dentro de u n modelo de m o v i l i d a d es limitar el m o v i m i e n t o del nodo en trayectos de u n mapa. E l m a p a está predefinido e n
el área de simulación y u t i l i z a u n a gráfica aleatoria para modelar el m a p a de l a c i u d a d .
E s t a gráfica puede ser generada aleatoriamente representando los edificios de l a c i u d a d ,
y los bordes de calles y carreteras entre estos edificios.
Inicialmente, los nodos son colocados aleatoriamente en los límites de l a gráfica. Entonces
p a r a cada nodo, se selecciona aleatoriamente u n destino y el n o d o se mueve hacia éste destino a través del trayecto más corto. A su llegada, el n o d o p a u s a u n tiempo Tpausa
y nuevamente selecciona destino p a r a el siguiente movimiento. E s t e procedimiento se
repite hasta que t e r m i n a l a simulación. A diferencia del R W P donde los nodos pueden
moverse libremente, a los nodos de este modelo se les permite solo v i a j a r sobre ciertos trayectos. S i n embargo, como l a fase de movimiento de cada destino es seleccionada
aleatoriamente, aún existe u n cierto nivel de aleatoriedad p a r a este modelo. P o r esta
Capítulo 3
Descripción del Modelo
E n este Capítulo, proponemos u n modelo p a r a analizar el i m p a c t o de l a m o v i l i d a d en l a
conectividad de l a M A N E T . Se establecen distintos conceptos y métricas p a r a describir
cualitativamente y cuantitativamente los comportamientos que existen en este t i p o de
redes en base a l m o d e l o de movilidad G a u s s - M a r k o v , mismo que puede representar
diversos escenarios u t i l i z a n d o el parámetro variable de memoria.
3.1. Descripción del escenario
P a r a estudiar u n a red desde los puntos de v i s t a de movilidad, c o n e c t i v i d a d y dinámica
de l a topología, es fundamental utilizar tres modelos p a r a representar l a topología de
u n a M A N E T : 1} u n modelo para l a distribución espacial de los nodos, 2) u n modelo de enrutamiento entre los nodos, 3) u n m o d e l o p a r a el comportamiento de m o v i l i d a d de los
nodos.
Se establece u n modelo de caracterización de l a M A N E T , mismo que esta basado en los
siguientes supuestos:
1. U n conjunto de n nodos son colocados en l a red de manera independiente y
alea-t o r i a en u n área
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
A de dos dimensiones. 2. U n a distribución uniforme: se u t i l i z a l a propiedad de homogeneidad de Poisson,[12]. P a r a u n a u n i d a d de área dA, l a probabilidad de existencia de u n nodo
será pdA, donde p = n/A es l a constante de densidad de nodos p o r u n i d a d de
área.
3. Se u t i l i za u n m o d e l o de transmisión inalámbrica entre dos nodos, en base a u n
enlace de radio, donde cada nodo tiene u n rango de transmisión r c o n u n a antena
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 17o m n i d i r e c c i o n a l . C a d a nodo es capaz de comunicarse directamente con cualquier
otro n o d o que se encuentre dentro de su rango de transmisión r . P o r s i m p l i c i d a d
de análisis, los enlaces se consideran bidireccionales.
4. Se c o n s i d e r a u n área de c o b e r t u r a definida como u n área circular de radio r , t a l quezyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA 7rr2 <C A.
5. Todos los nodos son libres de moverse en el área A de acuerdo a u n modelo de
m o v i l i d a d G a u s s - M a r k o v , [13].
C o n este m o d e l o de r e d , podemos representar u n a M A N E T , como u n grafo no dirigido
G. U n grafo G(V, E) que consiste de n nodos (vértices) y u n conjunto de pares de nodos
m (enlaces). E l c o n j u n t o de nodos, denotado por V = {v\,V2,... ,vn}, representa los
dispositivos M A N E T , y el conjunto de aristas, denotado p o r E = { e i, e 2 ,. . . , e „ _ i } , representa los enlaces inalámbricos bidireccionales. E s t a representación, nos permite
establecer l a dinámica de l a topología en l a que se basará nuestro estudio.
3.2. Métricas
E n esta Sección, se define l a terminología y las métricas de estudio que serán utilizadas
p a r a extraer las características de m o v i l i d a d y c o n e c t i v i d a d de l a M A N E T - . D e esta
manera, p o d e m o s analizar el i m p a c t o de l a movilidad sobre l a conectividad através del
enrutamiento de l a r e d .
3.2.1. T e r m i n o l o g í a
A n t e s de i n t r o d u c i r formalmente las métricas, se define l a terminología básica que se
utilizará en este estudio:
1. V¿(¿): V e c t o r de velocidad del nodo i en el t i e m p o í.
2.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
|vf (í)|: V e l o c i d a d del nodo i en el tiempo t.3. Oi(t): Á n g u l o generado por
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Vi(t) en t i e m p o í con respecto a l eje-X.4. RD{~ci{t), ~t (t1))): Dirección R e l a t i v a (o coseno del ángulo) entre los dos vectores
7 ? ( í ) , b (t') esta dado por
5. SR(~c?(t), l)(t'))): Razón de Velocidad entre los dos vectores (o coseno del ángulo)
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 186. Xj(t): C o o r d e n a d a X del n o d o i e n t i e m p o t.
7. y¿(t): C o o r d e n a d a Y del nodo i e n t i e m p o t.
8. Dij(i): D i s t a n c i a E u c l i d e a n a entre los nodos i y j en el t i e m p o t.
9. r : R a n g o de transmisión del n o d o móvil.
10. n: Número de nodos móviles.
11. T : T i e m p o de simulación.
3.2.2. M é t r i c a s d e m o v i l i d a d
P a r a diferenciar los patrones de m o v i l i d a d utilizados en nuestro estudio, se proponen
diferentes métricas de m o v i l i d a d que introducimos en esta Sección, mismas que son
propuestas inicialmente en [10] y [14]. E n este caso, u t i l i z a n d o el modelo de m o v i l i d a d G a u s s - M a r k o v [13], las métricas son útiles p a r a encontrar l a base de diferenciación en
grado de como el parámetro de m e m o r i a
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
a permite capturar diferentes característicasde l a dependencia t e m p o r a l y velocidad relativa de l a M A N E T .
1. G r a d o de d e p e n d e n c i a t e m p o r a l (DTD): E s el grado de s i m i l i t u d de las
velocidades de u n nodo i en los instantes de tiempo, t y t' = t + A i . E s t a
depen-dencia t e m p o r a l , está en función de l a dirección relativa, l a razón de velocidad y
las restricciones geográficas. F o r m a l m e n t e ,
E l valor de DTDi(t,t') se incrementa cuando el nodo i se mueve con dirección y
velocidad s i m i l a r sobre u n intervalo de tiempo, t a l que |í — t'\ > 0. S i n embargo,
DTDi(t, t') se decrementa si l a dirección relativa o l a razón de velocidad disminuye.
G r a d o de d e p e n d e n c i a t e m p o r a l promedio: E s el valor de DTDi(t,t') p r o
-mediado sobre los nodos e instantes de tiempo tales que DTD{(t, t') / 0. F o r m a l -(3.1)
mente,
(3.2)
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 19a u n t i e m p o anterior, entonces el patrón de m o v i l i d a d tendrá u n valor menor
p a r a DTD. S i n embargo, si l a velocidad actual es fuertemente dependiente de l a
velocidad a u n t i e m p o anterior, entonces el patrón de m o v i l i d a d tendrá u n valor
mayor p a r a DTD.
2. V e l o c i d a d r e l a t i v a (RS): E s el valor de l a velocidad de u n n o d o i, medido p o r
u n n o d o j en el tiempo t. Denotaremos a l valor l a velocidad relativa de u n par de
nodos (i, j) a u n tiempo t.
V e l o c i d a d r e l a t i v a p r o m e d i o : E s el valor de RSij(t) promediado sobre todos
los pares de nodos e instantes de t i e m p o tales que RSi¿(t) ^ 0. Formalmente,
donde P es el número de pares de nodos que satisfacen l a condición d a d a a u n
tiempo í.
3.2.3. M é t r i c a s d e c o n e c t i v i d a d
Debido a que el desempeño de una M A N E T es afectada por l a dinámica de l a topología,
es indispensable disponer de indicadores p a r a analizar el efecto de l a m o v i l i d a d en l a
co-nectividad entre los nodos móviles. L a s métricas de coco-nectividad c a p t u r a n estos efectos. E n ocasiones, estas métricas están correlacionadas con las métricas de m o v i l i d a d , [15].
E l grafo de conectividad esta definido como G = {V,E): t a l que |V| = n , a l t i e m p o
t, u n enlace (i,j) € E Di¿(t) < r. Sea Xi¿(t) u n a variable aleatoria l a c u a l
tiene el valor 1 si hay u n enlace entre los nodos i y j en el t i e m p o í, 0 de o t r a m a n e r a .
= ™axT=iXi,j(t) sea u n a variable aleatoria, l a cual es 1 si existió u n enlace entre
los nodos i y j en cualquier tiempo durante l a simulación, 0 cualquier otro.
1. C a m b i o s d e e n l a c e (LC): Se define como el número de veces en que el enlace
p a r a u n p a r de nodos i y j presenta u n a transición de estado "off" a " o n " o
viceversa. Formalmente,
(3.3)
(3.4)
CapítulozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 20donde Cij{t) es una variable aleatoria t a l que C¿¿(t) = 1 si Xij(t
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
— 1) = 0 yXij(t) = 1. P o r ejemplo, si e l enlace entre los nodos i y j es 0 en el t i e m p o t — 1
y es 1 en el tiempo t, se registra u n cambio de estado en dj(t).
C a m b i o s de enlace p r o m e d i o : E s el valor de LCÍJ promediado sobre todos los
pares de nodos que satistacen cierta condición. F o r m a l m e n t e ,
donde P es el numero de pares (i, j) tales que satisfacen l a condición d a d a .
3. T r a y e c t o r i a disponible (PA): E s l a fracción de t i e m p o durante l a c u a l u n a
trayectoria entre dos nodos i y j está disponible. E l p a r de nodos de interés son
aquellos que pueden mantener comunicación entre sí. Formalmente,
(3.6)
donde P es el numero de pares (i, j) tales que X ¿ ¿ ^ 0.
2. Duración de enlace (LD): E s l a duración promedio de l a existencia de u n enlace
entre dos nodos i y j. E s t a es u n a m e d i d a de estabilidad del enlace entre esos nodos.
F o r m a l m e n t e ,
(3.7)
Duración de enlace p r o m e d i o : E s el valor de LDÍJ promediado sobre toe
los pares de nodos tales que XÍJ ^ 0. Formalmente,
(3.8)
(3.9)
donde Ai¿(t) es una variable aleatoria l a c u a l tiene u n valor 1 si existe u n a t r a
-yectoria disponible del n o d o i al nodo j en el tiempo í, y tiene un valor 0 p a r a
cualquier otro.
T r a y e c t o r i a disponible p r o m e d i o : E s el valor de PAÍJ promediado sobre todos
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 21(3.10)
donde P es el numero de pares (i,j) tales que satisfacen l a condición dada.
3.3. Nodos aislados (NA)
L a existencia de nodos aislados es sin d u d a u n característica indeseable p a r a u n a red
inalámbrica. E n u n a red inalámbrica no móvil, u n nodo aislado no puede intercambiar
cualquier información con otros nodos y por lo t a n t o es inútil p a r a el resto de los nodos.
E n u n escenario móvil, u n nodo aislado que quiere enviar o recibir información debe esperar hasta que se mueva dentro del rango de otro nodo o h a s t a que otro nodo se
ubique dentro del rango de éste. E s t o puede hacer que u n mensaje se v u e l v a inaceptable
p o r el retraso de entrega.
Consideremos el siguiente problema de rango de cobertura: U n conjunto de n nodos, cada
n o d o con u n rango de transmisión r , son d i s t r i b u i d o s de manera aleatoria y uniforme en u n área A 3> r27 r (densidad de nodos p = n/A). D e t e r m i n a r el rango mínimo t a l que,
con u n a alta p r o b a b i l i d a d p, ningún nodo en l a red esté aislado (es decir, cada nodo
tiene a l menos u n vecino).
P a r a resolver este p r o b l e m a , se emplea el m é t o d o del vecino más cercano, [16]. L a
dis-t a n c i a de u n p u n dis-t o a l pundis-to del vecino más cercano es definido como su distancia del vecino más cercano £. P a r a u n proceso de p u n t o de Poisson homogéneo en dos d i m e n
-siones (intensidad constante p), l a función de densidad de p r o b a b i l i d a d de l a distancia
del vecino más cercano es
E n nuestra aplicación, u n "punto aleatorio" representa u n "nodo aleatorio" de l a M A -N E T . Así, l a p r o b a b i l i d a d de que l a distancia entre u n nodo seleccionado aleatoriamente
y su nodo vecino más cercano sea menor o i g u a l a ra es
(3.11)
(3.12)
Si establecemos el rango de cobertura de todos los nodos a ra = r. L a ecuación (3.12)
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 22(3.13)
L a p r o b a b i l i d a d de que u n nodo no tenga vecinos v(i) = 0, es decir que sea u n nodo
aislado, es entonces
E l objetivo es obtener u n a red del grafo G en l a cual ninguno de los n nodos esté aislado,
es decir que, v(i) > 0 , V i e G # vmin(G) > 0. A s u m i e n d o independencia, l a p r o b a b i l i d a d
del evento es
E n nuestro estudio, esta métrica será utilizada p a r a c a p t a r las características de l a
M A N E T b a j o e l modelo de m o v i l i d a d G a u s s - M a r k o v , [13]. D e esta manera, será posible observar las distintas probabilidades de encontrar nodos aislados en nuestra r e d , es decir,
l a p r o b a b i l i d a d de que u n nodo i n o tenga l a p o s i b i l i d a d de establecer u n enlace directo
con u n n o d o j, p a r a cualquier instante de tiempo t.
3.4. Grado de nodo mínimo (MND)
E l grado de u n nodo i en u n grafo, se denota como v(i), el c u a l es el número de vecinos dentro del área de cobertura del nodo i, es decir, su número de enlaces directos a otros
nodos, [16]. U n nodo de grado v = 0 esta aislado, osea que n o tiene vecinos. E l grado de
nodo mínimo vmin(G) de u n grafo G se define como
U n grado de n o d o estable hace que u n nodo de l a M A N E T sea más robusto c o n t r a los
rupturas de enlaces con los vecinos. Además, en algunos clases de redes ad hoc, h a y u n
número óptimo de vecinos que c a d a nodo debe tener, con l a finalidad de lograr u n mejor
rendimiento, [17].
(3.14)
(3.15)
Capítulo 3.
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Descripción del Modelo 23U n a red con vmin < no requiere que c a d a nodo tenga por lo menos no vecinos. C o n s i d e
-r a n d o las m i s m a s condiciones de análisis que en l a Sección 3.3, es i m p o -r t a n t e dete-rmina-r
que l a p r o b a b i l i d a d del grado de n o d o mínimo sea más grande que
noE s t a métrica será a p l i c a d a a nuestra simulación, con l a finalidad de observar el c o m p o r
-tamiento de l a M A N E T p a r a determinar cual será el grado mínimo de l a m i s m a . E s t a característica es i m p o r t a n t e , y a que de esta manera, se puede a s u m i r c u a l es el número
de enlaces directos probables p a r a c a d a uno de los n nodos de l a r e d , p a r a cualquier
instante de t i e m p o t.
3.5. Tiempos de intercontacto (TIC)
E l análisis estadístico de l a m o v i l i d a d en u n a M A N E T , contiene indicadores de
relevan-cia, mismos que en ocasiones presentan caracterizaciones de distribuciones h e a v y - t a i l o de valores extremos tales como E x p o n e n c i a l , W e i b u l l , L o g n o r m a l y P a r e t o , [12]. U t i l i z a n
-do el modelo de m o v i l i d a d G a u s s - M a r k o v [13], se estudian los t i e m p o s de intercontacto
( T I C ) , que se definen como el t i e m p o de duración en que u n par de nodos móviles i y j
vuelven a enlazarse en el tiempo (í + A i ) después de que existió u n enlace previo en el tiempo t, [18].
A pesar de que los T I C no revelan información esencial de posición, estos si pueden
contener información de relevancia con respecto a l rendimiento y desempeño de l a r e d . L o s tiempos de intercontacto caracterizan l a frecuencia con l a que u n p a r de nodos puede
intercambiar información en u n enlace directo. C a b e señalar, que el T I C se c a l c u l a a l
final de cada periodo de enlace entre el par de nodos i y
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
j, t o m a n d o como referencia elintervalo de t i e m p o entre el inicio y el final del enlace directo, es decir \ tf
zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
— U\.(3.17)
P o r lo tanto, asumiendo l a independencia estadística entre los nodos, l a p r o b a b i l i d a d de
que el grado de n o d o mínimo vm¡n > no es igual a l a p r o b a b i l i d a d de que exista por lo
menos no nodos dentro del área de c o b e r t u r a irr2:
![FIGURA 2.1: Modelos de movilidad macroscópicos y microscópicos, [1].](https://thumb-us.123doks.com/thumbv2/123dok_es/4440783.34973/22.612.154.556.286.682/figura-modelos-movilidad-macroscopicos-microscopicos.webp)
![FIGURA 2.2: Categorización de modelos de movilidad en redes ad hoc, [2].](https://thumb-us.123doks.com/thumbv2/123dok_es/4440783.34973/25.612.171.544.137.364/figura-categorizacion-modelos-movilidad-redes-ad-hoc.webp)

![FIGURA 2.5: Manhattan Mobility Model, [2].](https://thumb-us.123doks.com/thumbv2/123dok_es/4440783.34973/31.612.199.482.329.545/figura-manhattan-mobility-model.webp)