Cap´ıtulo 1
Curvas en el plano y en el espacio
1.1.
Curvas parametrizadas
Definici´on 1.1.1 (Curva parametrizada). Una curva parametrizada diferenciableα:I−→Rn
, es una aplica-ci´on de claseC∞, dondeI⊂Res un intervalo abierto, que puede ser una semirrecta o todoR.
Esto significa que siα(t) = (x1(t), . . . , xn(t)), entonces las funcionesxi(t)son de claseC∞.
La variabletrecibe el nombre de par´ametro de la curva.
La imagenα(I)se denomina traza de la curva.
Este curso estudiaremos ´unicamente curvas en el plano y en el espacio.
Ejemplo 1.1.2.
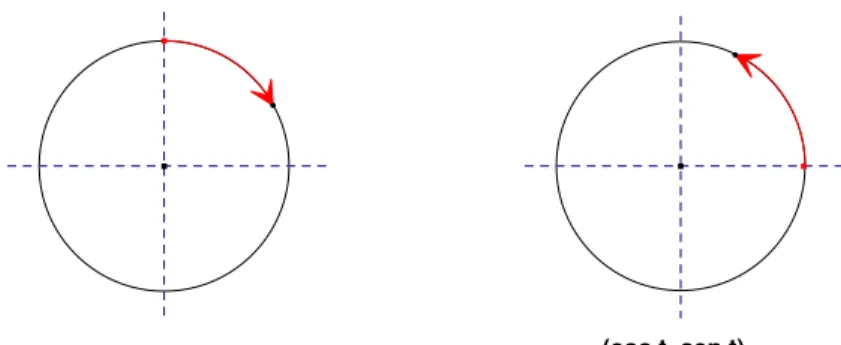
-1. No hay que identificar la curva (una aplicaci´on) con su traza (un subconjunto del plano o el espacio). Las dos curvas
α(t) = (sent,cost) y β(t) = (cost,sent),
son diferentes y, sin embargo tienen la misma traza (la circunferencia unidad).
(sen t, cos t) (cos t, sen t)
Figura 1.1: Dos curvas con una misma traza.
2. La recta, en su conocida forma param´etrica,
α(t) = (p1+tv1, p2+tv2, p3+tv3)
3. Una curva no es necesariamente inyectiva, es decir, puede tener autointersecciones. As´ı, la curva parametri-zadaα(t) = (t3
−4t, t2
−4)
Figura 1.2: Un curva puede tener autointersecciones.
4. Una curva parametrizada no es, necesariamente diferenciable; por ejemploα(t) = (t,|t|), ya que|t|no es diferenciable ent= 0.
line0
Figura 1.3: Un curva no es , necesariamente diferenciable.
5. Sin embargo hay curvas diferenciables, cuya traza tiene “picos ”; por ejemploα(t) = (t3
, t2
).
Figura 1.4: Curva diferenciable, con aspecto “enga˜noso”.
Definici´on 1.1.3 (Vector tangente o vector velocidad). Al vectorα′(t) = (x′(t), y′(t), z′(t))se le llama vector
tangente a la curvaα, parat∈Io vector velocidad. La velocidad eskα′(t)k.
Llamaremos recta tangente a la curvaαen el puntoα(t)a la recta que pasa por dicho punto y tiene como vector director al vector tangente a la curva en tal punto. Observemos que siα′(t) = 0para alg ´unt ∈ I, entonces no podemos calcular la recta tangente. A los puntos de la curvaαcuyo vector tangente es cero, se les llama puntos singulares. En la curva del ejemplo (5) anterior,α(0)es un punto singular.
Definici´on 1.1.4 (Curva regular). Una curva param´etrica diferenciableα : I −→ R3
es una curva regular si
1.2.
Reparametrizaciones. Longitud del arco
Ejemplo 1.2.1. Es f´acil ver que las curvas parametrizadas siguientes tienen como traza la circunferencia de centro el origen y radio unidad:
α(t) = (cost,sent), t∈R
β(t) = (cos(−t),sen (−t)), t∈R
γ(t) = cos(t+π
2),sin (t+
π
2)
, t∈R
Definici´on 1.2.2 (Reparametrizaci´on). Seaα:I−→R3
una curva parametrizada diferenciable; yg:J −→I
un difeomorfismo. Entonces la aplicaci´on β : J −→ R3
definida como β = α◦g, es claramente una curva parametrizada diferenciable que se llama reparametrizaci´on de la curvaα; la aplicaci´ongrecibe el nombre de cambio de par´ametro.
Ejercicio 1.2.3.
-1. ¿Cu´ales son los cambios de par´ametro en el ejemplo anterior? ¿Qu´e ocurre con la velocidad en cada uno de ellos?
2. Seaβes una reparametrizaci´on de una curva parametrizada diferenciableα.
a) Demuestre queβes regular si, y s´olo siαlo es.
b) La rectas tangentes en cualquier punto coinciden.
3. Explique por qu´eδ(t) = (cos(t3
),sen(t3
))no es una reparametrizaci´on deα(t) = (cost,sent),t∈R.
1.2.1.
Longitud del arco
Seaα : I −→ R3
una curva parametrizada diferenciable y un intervalo cerrado[a, b] ⊂ I. Consideremos una partici´on de dicho intervalo
P={a=t0< t1< . . . < tn =b};
dicha partici´on determina una l´ınea (curva) poligonal inscrita en la traza deα, cuya longitud no es otra cosa que
(a)=
(t )
(t )
(t )
(b)= D
D
D D(t )
(t ) D D
D
0 1
2
3
4
Figura 1.5: Una poligonal inscrita en la curva.
la suma de las longitudes de cada uno de los segmentos que la forman
Lba(P, α) = n
X
k=1
kα(tk)−α(tk−1)k.
Proposici´on 1.2.4. Siα:I−→R3
es una curva parametrizada diferenciable y[a, b]⊂I; entonces
l´ım
|P|→0L
b
a(α, P) =
Z b
a k
α′(t)kdt.
Demostraci´on. Veamos que para cadaε >0, existeδ >0tal que si|P|< δ, entonces
La(α, P)−
Z
ak
α′(t)kdt
< ε
Siα(t) = (x(t), y(t), z(t)), entonceskα′(t)k=p
(x′(t))2+ (y′(t))2+ (z′(t))2
Por otra parte, por el teorema del valor medio aplicado a cada una de las funcionesx,y,z, tenemos que para cada intervalo de la partici´on existenak, bk, ck∈(tk−1, tk)tales que
x(tk)−x(tk−1) =x′(ak)(tk−tk−1)
y(tk)−y(tk−1) =y′(bk)(tk−tk−1)
z(tk)−z(tk−1) =z′(ck)(tk−tk−1)
En definitiva tenemos
Lba(α, P) = n
X
k=1
kα(tk)−α(tk−1)k=
n
X
k=1
k(x′(ak), y′(bk), z′(ck))k(tk−tk−1)
Si ahora consideramos la integral y aplicamos el teorema del valor intermedio, existenξk ∈(tk−1, tk), para cada
k= 1, . . . , ntales que
Z b
a k
α′(t)kdt=
n
X
k=1
Z tk
tk−1
kα′(t)kdt=
n
X
k=1
kα′(ξk)k(tk−tk−1).
Entonces tenemos
La(α, P)−
Z
ak
α′(t)kdt=
n
X
k=1
k(x′(ak), y′(bk), z′(ck))k(tk−tk−1)−
n
X
k=1
kα′(ξk)k(tk−tk−1) =
n
X
k=1
(k(x′(ak), y′(bk), z′(ck))k − kx′(ξk), y′(ξk), z′(ξk))k) (tk−tk−1). (1.1)
Ahora podemos considerar la funci´onf(t1, t2, t3) =
p
(x′(t1))2+ (y′(t2))2+ (z′(t3))2, definida entreI3
yR
que, es claramente continua y por tanto, uniformemente continua en el compacto[a, b]3
⊂I3
. Esto significa que dadoε >0, existeδ >0tal que si
(t1, t2, t3),(t′1, t′2, t′3)∈[a, b] 3
y|ti−t′i|< δparai= 1,2,3, entonces
kf(t1, t2, t3)−f(t′1, t′2, t′3)k<
ε
b−a (1.2)
.
Por tanto si tomamos una partici´onPtal que|P|< δ, dado queak, bk, ck, ξk ∈[tk−1, tk], se cumple la condici´on
Lba(α, P)−
Z b
a k
α′(t)kdt
≤ n X k=1
(kf(ak, bk, ck)−f(ξk, ξk, ξk)k)(tk−tk−1)<
ε b−a
n
X
k=1
(tk−tk−1) =ε.
Despu´es de la proposici´on anterior podemos definir la longitud de un arco de curva del siguiente modo.
Definici´on 1.2.5 (Longitud del arco). Dada una curva parametrizada diferenciableα:I −→R3
y un intervalo
[a, b]⊂I, definimos la longitud del arco de curvaα([a, b])como
Lba(α) =
Z b
a k
α′(t)kdt.
1.2.2.
Curvas parametrizadas por la longitud del arco
Observaci´on 1.2.6. Se ve f´acilmente que si kα′(t)k = 1para todot ∈ I, entoncesLt
a(α) = t−a, es decir
la longitud del arco coincide con con la del segmento [a, t]; y rec´ıprocamente, si ocurre esto ´ultimo, entonces
kα′(t)k= 1. Adem´as sia= 0, entoncesLt
0(α) =t.
Definici´on 1.2.7 (Curva parametrizada por la longitud del arco). Seaα:I−→R3es una curva parametrizada diferenciable, diremos que dicha curva est´a parametrizada por la longitud del arco sikα′(t)k= 1.
Proposici´on 1.2.8. Toda curvaα:I−→R3
parametrizada diferenciable y regular, se puede parametrizar por la longitud del arco.
Demostraci´on. Dadot0∈I, podemos definir la funci´onL:I:−→Rcomo
L(t) =Ltt0(α) =
Z t
t0
kα′(s)kds;
la funci´onkα′(s)kes, en general, ´unicamente continua, luego la funci´onLes derivable conL′(t) =kα′(t)k; pero al serαregular tenemos queLes de claseC∞y creciente, por tanto, siJ =L(I),L:I−→J es una biyecci´on y su inversag : J −→I, es de claseC∞, es decir, se trata de un difeomorfismo, con lo cualβ =α◦ges una reparamentrizaci´on deα.
Veamos queβes una parametrizaci´on por la longitud del arco. En efecto, observemos queg(L(t)) = t, luego si derivamos
g′(L(t))L′(t) = 1; y por tanto g′(L(t)) = 1 L′(t) =
1 kα′(t)k
Entonces
β′(s) =α′(g(s))g′(s) = α
′(g(s))
kα′(g(s))k
de donde se deduce quekβ′(s)k, con lo que ya lo tenemos.
Ejemplo 1.2.9.
.-1. Seaα(θ) = (rcosθ, rsenθ), conr > 0, entoncesα′(θ) = (−rsenθ, rcosθ)y, por tantokα′(θ)k = r.
EntoncesL(t) =rt, con lo que la inversa esg(s) =s
r. Entonces
β(s) =rcoss r, rsen
r s
2. Consideremos ahora la curvaα(t) = (t, t2
), entoncesα′(t) = (1,2t)y por tantokα′(t)k = √1 + 4t2.
Entonces
L(t) =
Z t
0
p
1 + 4s2ds= 1
4ln
2t+p1 + 4t2+1
2t
p
1 + 4t2,
pero no podemos despejartcon lo que no podemos encontrar expl´ıcitamente la reparametrizaci´on por la longitud del arco.
1.3.
Ejercicios y problemas
1. La curvaα:R−→R3
definida como
α(t) = aebtcost, aebtsent
con a >0, b <0,
se llama espiral logar´ıtmica (una curva curiosa y con historia).
a) Calcule la funci´on longitud del arco, parat0∈R, relativa at0.
b) Reparametrice esta curva por la longitud del arco.
c) Estudie su traza.
Figura 1.6: Espiral logar´ıtmica.
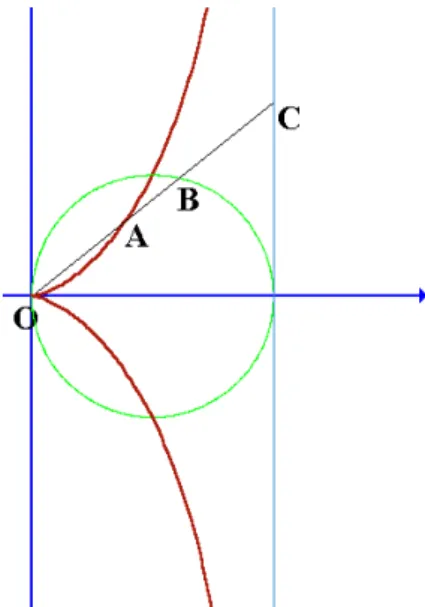
2. Una curva cisoide es la generada por la suma de los vectores de posici´on de dos curvas fijas. La cisoide de Diocles es la curva generada por la diferencia entre el vector de posici´on de los puntos de una recta paralela al ejeY que pasa por el punto(2a,0)y el vector de posici´on de la circunferencia de radioacentrada en
(a,0)como muestra la figura. Encuentre una parametrizaci´on de dicha curva.
Figura 1.7: Cisoide de Diocles.
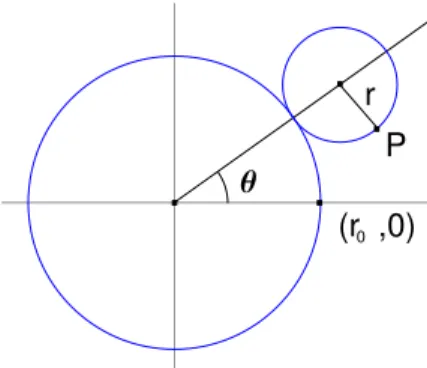
T
(r ,0)
0r
P
Figura 1.8: Epicicloide.
a) Determine una parametrizaci´on de la epicicloide generada por un puntoP una circunferencia de radio
rque que gira sobre una circunferencia de radior0centrada en el origen, suponiendo que la posici´on
inicial deP es(r0,0).
b) Suponga quer0= 3yr= 1. Encuentre los puntos singulares de la curva y repres´entela gr´aficamente.
c) Idem para los casosr0=r= 1yr0= 1yr= 2.
4. La hipocicloide es la curva plana generada por el movimiento de un punto de una circunferencia que rueda, sin deslizamiento, por el interior de otra circunferencia.
T
(r ,0)0
r
P
Figura 1.9: Hipocicloide.
a) Determine una parametrizaci´on de la epicicloide generada por un puntoP una circunferencia de radio
rque que gira sobre una circunferencia de radior0centrada en el origen, suponiendo que la posici´on
inicial deP es(r0,0).
b) Suponga quer0= 5yr= 2. Encuentre los puntos singulares de la curva y repres´entela gr´aficamente.
5. Demuestre que la longitud de una curva parametrizada diferenciable es invariante por movimientos r´ıgidos.
6. Seaα : R −→ R2
la espiral logar´ıtmica dada porα(t) = aebt
(cos(t),sen(t)), dondea > 0y b < 0. Calcule la funci´on longitud de arco deα. Reparametrice esta curva por la longitud de arco.
7. Siα:I −→R3
es una curva parametrizada diferenciable y[a, b]. Demuestre quekα(b)−α(b)k ≤Lb a(α)
(Los segmentos de recta son las curvas de menor longitud, entre las que unen dos puntos)
8. Seaα:I−→R3
a) Siαno pasa por el origen yα(t0)es el punto de la traza deαm´as cercano al origen yα′(t0) 6= 0,
demuestre que los vectoresα(t0)yα′(t0)son ortogonales.
b) Siα′′(t)es id´enticamente nula, ¿que se puede decir sobreα?
c) Siα′(t)6= 0para todot∈ I. Demuestre que|α(t)|es una constate no nula si, y s´olo siα(t)yα′(t)
son ortogonales para todot∈I.
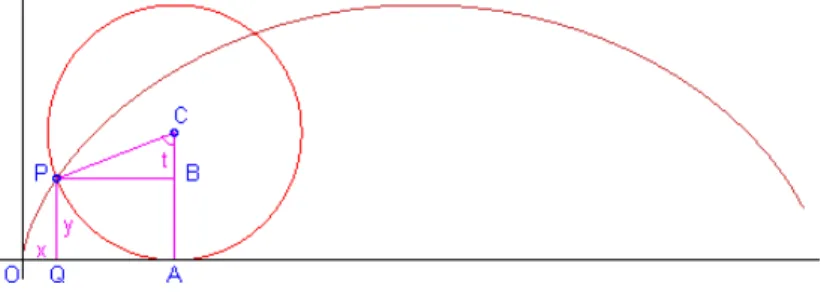
9. Un puntoP de una circunferencia de radioren el planoXY que rueda, sin deslizamiento sobre el ejeX
describe una cura que se llama cicloide.
Figura 1.10: Cicloide.
a) Obtenga una parametrizaci´on para la cicloide suponiendo que la circunferencia de radiorparte de la posici´on en que su centro es el punto(0, r)y que la posici´on de partida dePes el origen.
b) C´alcule la longitud de la cicloide correspondiente a una rotaci´on completa de la circunferencia.
c) Parametrice la cicloide por la longitud del arco.
10. La curva de Gergome es la curva determinada por la intersecci´on de dos cilindros perpendiculares. Sean los cilindrosx2
+ (z−1)2
= 1yy2
+z2
= 1. Demuestre queα(t) = (√2 cost−cos2t,sent,cost), con
t∈(−π
2,
π
2)es una parametrizaci´on diferenciable, pero parcial de la curva de Gergome de los dos cilindros