A
ASSEESSOORREESS:: Q
QUUEEPPAARRAAOOBBTTEENNEERREELLTTÍÍTTUULLOODDEE::
I
INNGGEENNIIEERROOEELLEECCTTRRIICCIISSTTAA
P
PRREESSEENNTTAA::
M
A MIS HERMANOS:
A MIS TIOS:
! " "
# $% &'
A LOS MOMENTOS DIFICILES:
"#
& )&
* +
!
(
+
,)
!
& ,
-
*
(
#!
./ -
0
1 2#
#
#
!
"
-
(
Resumen
En el presente trabajo de tesis se estudia el comportamiento del relevador microprocesado aplicado en un esquema de protección de línea corta en 230 kV. De acuerdo a los esquemas normalizados que se emplean en el sistema eléctrico de potencia nacional, para líneas de transmisión las cuales se consideren cortas de a acuerdo a su longitud, las funciones que se deben de emplear para su protección y de las cuales se habla en este trabajo son:
Protección primaria uno 87L/21/67N.
Protección primaria dos 87L/21/67N.
Considerando lo anterior, se realiza el estudio del principio teórico de operación de estas funciones de protección y operación de las mismas funciones pero desde el punto de vista del relevador microprocesado analizando la lógica interna de estas funciones.
El relevador diferencial de línea microprocesado es frecuentemente instalado en el esquema de protección de cualquier tipo de línea de transmisión y subtransmisión del país, por lo que dentro de las pruebas de puesta en servicio de la línea se encuentran las pruebas del esquema de protección las cuales son necesarias para verificar el correcto funcionamiento y ajustes del relevador de protección; estas pruebas consisten en realizar inyecciones de tensión y corriente al relevador de protección simulando las condiciones del sistema en el momento de una falla.
Algo que es importante para el correcto funcionamiento de un esquema de protección es la configuración o el ajuste del relevador de protección, por lo tanto se explica detalladamente la configuración de cada una de estas funciones de protección dentro un relevador microprocesado modelo 411L el cual fue utilizado para realizar las pruebas de aplicación.
Índice.
Página
RESUMEN……… i
INDICE………...iii
INDICE DE FIGURAS………..vi
NOMENCLATURA………....x
INTRODUCCIÓN……….xii
OBJETIVO DE LA TESIS………...xiii
PLANTEAMIENTO DEL PROBLEMA………...xiii
JUSTIFICACIÓN………..…... xiv
ESTADO DEL ARTE………xv
APORTACIÓN DE LA TESIS………. xvi
ESTRUCTURA DE LA TESIS……… .xvi
CAPÍTULO 1: GENERALIDADES DE LA PROTECCIÓN POR RELEVADORES. 1.1 INTRODUCCIÓN………... 1
1.2 CONDICIONES DE OPERACIÓN DE UN S. E. P. DURANTE SU PROCESO DE EXPLOTACIÓN………. 1
1.3 FUNCIÓN DE LA PROTECCIÓN……….. 2
1.4 CARACTERISTICAS DE LA PROTECCIÓN……… 2
1.5 QUÉ ES UN RELEVADOR………... 4
1.6 PRINCIPIO DE LA PROTECCIÓN POR RELEVADORES……….. 4
1.6.1. PROTECCIÓN PRIMARIA………... 5
1.6.2. PROTECCIÓN DE RESPALDO………... 6
1.7 ELEMENTOS BÁSICOS DE UN ESQUEMA DE PROTECCIÓN……… 8
1.8 CONCEPTOS BÁSICOS DE LA PROTECCIÓN POR RELEVADORES……….9
1.8.1 DETECCIÓN DE FALLAS……….10
1.8.2 DETECCIÓN DE NIVEL DE AJUSTE………..10
1.9 DIAGRAMAS ESQUEMATICOS DE PROTECCIÓN DE LINEAS DE TRANSMISIÓN………..11
CAPÍTULO 2: PROTECCIÓN DE LÍNEAS.
2.1 INTRODUCCIÓN……… 17
2.2 REQUERIMENTOS Y FACTORES QUE SE DEBEN DE TOMAR ENCUENTA PARA EL DISEÑO DE UN ESQUEMA DE PROTECCIÓN DE LINEA………. 17
2.3 PROTECCIÓN DE LINEAS CON RELEVADORES DE SOBRECORRIENTE………..18
2.3.1 AJUSTE DE RELEVADOR DE SOBRECORRIENTE TEMPORIZADO DE FASE 50PT………. 18
2.3.2 AJUSTE DE RELEVADOR DE SOBRECORRIENTE TEMPORIZADO DE TIERRA 50GT………..20
2.3.3AJUSTE DE RELEVADOR DE SOBRECORRIENTE INSTANTANEO DE FASE Y TIERRA 50P Y 50G………..20
2.4 RELEVADOR DE SOBRECORRIENTE DIRECCIONAL 67………... 21
2.4.1 SOBRECORRIENTE DE TIERRA DE SECUENCIA CERO………. 21
2.4.2 SOBRECORRIENTE DE TIERRA DE SECUENCIA NEGATIVA………... 22
2.5 PROTECCIÓN DE LINEAS CON RELEVADORES DE DISTANCIA 21………...23
2.5.1 TIPOS DE CARACTERISTICAS DE RELEVADOR DE DISTANCIA………... 25
2.5.2 CARACTERISTICA DE TIPO IMPEDANCIA……….. 26
2.5.3 CARACTERISTICA DE TIPO MHO………. 28
2.5.4 CARACTERISTICA DE TIPO REACTANCIA………. 29
2.5.5 CARACTERISTICA DE TIPO POLIGONAL O CUADRILATERAL………. 31
2.6 COMUNICACIÓN DE ESQUEMAS DE PROTECCION TIPO PILOTO……… 32
2.6.1 HILO PILOTO………. 33
2.6.2 CANAL DE ONDA PORTADORA……… 35
2.6.3 CANAL DE MICROONDAS……….. 37
2.6.4 CANAL DE FIBRA OPTICA………. 38
2.7 PROTECCIÓN POR HILO PILOTO……….. 38
2.7.1 PILOTO POR COMPARACIÓN DE FASES………. 43
2.7.2 PILOTO POR COMPARACIÓN DIRECCIONAL……… 48
CAPÍTULO 3: CONOCIMIENTO DE LAS FUNCIONES DE PROTECCION DEL RELEVADOR MICROPROCESADO UTILIZADAS COMO PP1 Y PP2 EN LOS ESQUEMAS DE PROTECCIÓN. 3.1 INTRODUCCIÓN……… 50
3.3 CARACTERISTICAS DE UN ESQUEMA DE PROTECCIÓN PARA UNA LINEA DE TRANSMISIÓN DE 230 KV CON PROTECCIÓN DIFERENCIAL
COMO PROTECCIÓN PRIMARIA UNO Y DOS………. 58
3.4 FUNCIÓN (87L) PROTECCIÓN DE CORRIENTE DIFERENCIAL DE LÍNEA……… 59
3.4.1 PRINCIPIO DE FUNCIONAMIENTO DE LA PROTECCION (87L) DEL RELEVADOR SEL 411L………...59
3.4.2 PROCESAMIENTO DE SEÑALES………. 60
3.4.3 GENERALIDADES DEL PLANO ALFA………62
3.4.4 LOGICA DE DISPARO……… 66
3.5 ELEMENTOS DE DISTANCIA (21) DEL RELEVADOR……… 69
3.5.1 ELEMENTOS DE DISTANCIA (21) DE TIERRA CARACTERÍSTICA MHO………70
3.5.2 ELEMENTOS DE DISTANCIA (21) DE TIERRA CARACTERÍSTICA CUADRILATERAL………..70
3.5.3 ELEMENTOS DE DISTANCIA (21) DE FASE CARACTERÍSTICA MHO……… 71
3.5.4 ELEMENTOS DE DISTANCIA (21) DE FASE CARACTERÍSTICA CUADRILATERAL………..71
3.5.5 CANTIDADES DE POLARIZACIÓN PARA CÁLCULOS DE ELEMENTOS DE DISTANCIA………...71
3.6 DIRECCIONALIDAD.……… 72
3.6.1 ELEMENTO DIRECCIONAL DE TIERRA (67N)………. 72
3.6.2 ELEMENTOS DE FASE Y SECUENCIA POSITIVA DIRECCIONALES (67P)………. 73
3.6.3 ELEMENTOS INSTANTÁNEOS DE SOBRECORRIENTE DE LÍNEA (50)………...73
3.6.4 ELEMENTOS DE SOBRECORRIENTE DE TIEMPO (51)………... 73
Capítulo 4: PRUEBAS DE PUESTA EN SERVICIO DE LAS FUNCIONES DEL RELEVADOR EMPLEADAS COMO PP1 Y PP2 DEL RELEVADOR MICROPROCESADO. 4.1 INTRODUCCIÓN……… 75
4.2 CONFIGURACION BASICA DE LOS RELEVADORES PARA LA PROTECCIÓN DIFERENCIALES DE LINEA 87L………..76
4.3 AJUSTES Y CONFIGURACIÓN DE LA PROTECCIÓN 87L………. 79
4.4 PRUEBAS PROTECCIÓN 87L………... 82
4.5 AJUSTES Y CONFIGURACIÓN DE LA PROTECCIÓN 21……… 92
4.6 PRUEBAS PROTECCION 21………. 94
4.7 AJUSTES Y CONFIGURACIÓN DE LA PROTECCIÓN 67……… 97
Capítulo 5: ANALISIS ECONOMICO.
5.1 ANÁLISIS ECONÓMICO………...102 5.2 ALCANCE DE TRABAJOS A REALIZAR………...102 5.3 CONFIGURACIÓN DEL RELEVADOR Y PRUEBAS DEL ESQUEMA DE
PROTECCIÓN……….104 5.4 CONCLUSIONES………104
REFERENCIAS.
BIBLIOGRAFIA………108
Anexo A:
AJUSTES DE LOS RELEVADORES DE PROTECCION.
A.1 AJUSTES DE LOS RELEVADORES DEL ESQUEMA DE PROTECCIÓN 87L, 21 y 67…………111 A.1.1 AJUSTES DEL RELEVADOR 87L TERMINAL LOCAL………111 A.1.2 AJUSTES DEL RELEVADOR 87L TERMINAL REMOTA……….………113 A.1.3 AJUSTES DE LA FUNCIÓN DE DISTANCIA 21 DEL RELEVADOR………116 A.1.4 AJUSTES DE LA FUNCIÓN DE SOBRECORRIENTE DIRECCIONAL 67 DEL
RELEVADOR………118
Anexo B:
LOGICA EMPLEADA POR EL RELEVADOR.
B.1 LOGICA BOLEANA………124 B.2 COMPUERTAS LOGICAS………..124
Anexo C:
CARACTERISTICAS Y ESPECIFICACIONES TECNICA DE EQUIPOS DE PRUEBAS UTILIZADOS.
C.1 SMRT 36………..………126 C.2 CMC356……….………..129
ÍNDICE DE FIGURAS
Página
Figura 1.1 ZONAS DE PROTECCIÓN DE LOS SISTEMAS ELÉCTRICOS DE POTENCIA...5
Figura 1.3 GRAFICA DE TIEMPO DE OPERACIÓN DEL RELEVADOR DETECTOR DE
NIVEL……….11
Figura 1.4 ARREGLO NORMALIZADO DE TELEPROTECCIÓN PARA LÍNEAS EN 400 kV Y 230KV = 10 KM, CON MEDIO DE COMUNICACIÓN PRINCIPAL FIBRA ÓPTICA DEDICADA Y RESPALDO FIBRA ÓPTICA DEDICADA (PP1- 87L/21/67 Y PP2- 87L/21/67)………15
Figura 1.5 ARREGLO NORMALIZADO DE TELEPROTECCIÓN PARA LÍNEAS EN 400 kV Y 230KV = 15 KM, CON MEDIO DE COMUNICACIÓN PRINCIPAL FIBRA ÓPTICA DEDICADA Y RESPALDO FIBRA ÓPTICA MULTIPLEXADA (PP1- 87L/21/67 Y PP2- 87L/21/67)………..16
Figura 2.1 CONEXIÓN DEL RELEVADOR DE DISTANCIA A LÍNEA DE TRANSMISIÓN……...24
Figura 2.2 REPRESENTACIÓN DE LÍNEA PROTEGIDA POR UN RELEVADOR DE DISTANCIA Y SU PLANO DE IMPEDANCIA………25
Figura 2.3 TIPOS DE CARACTERÍSTICAS DE RELEVADORES DE DISTANCIA………...…25
Figura 2.4 CARACTERÍSTICA DE FUNCIONAMIENTO DE UN RELEVADOR TIPO IMPEDANCIA………...………...27
Figura 2.5 CARACTERÍSTICA DE FUNCIONAMIENTO DE UN RELEVADOR DE IMPEDANCIA EN UN DIAGRAMA X-R….………..27
Figura 2.6 CARACTERÍSTICA DE FUNCIONAMIENTO DE UN RELEVADOR DE DISTANCIA TIPO MHO………..28
Figura 2.7 CARACTERÍSTICA DE FUNCIONAMIENTO DE UN RELEVADOR DE DISTANCIA DEL TIPO REACTANCIA………..……….……… 30
Figura 2.8 CARACTERÍSTICA DE FUNCIONAMIENTO DE UN RELEVADOR DIRECCIONAL CON TENSIÓN DE RETENCIÓN………30
Figura 2.9 CARACTERÍSTICA TIPO CUADRILATERAL DEL RELEVADOR DE DISTANCIA….….31 Figura 2.10 ESQUEMA GENERAL DE ONDA PORTADORA……….…….35
Figura 2.11 PROTECCIÓN PILOTO DE CORRIENTES CIRCULANTES………39
Figura 2.12 PROTECCIÓN PILOTO TENSIONES ENPOSICIÓN………...40
Figura 2.13 DIAGRAMA ESQUEMÁTICO PROTECCIÓN HILO PILOTO CORRIENTES CIRCULANTES………. 41
Figura 2.14 PROTECCIÓN PILOTO POR COMPARACIÓN DE FASE……… 44
Figura 2.15 PRINCIPIO DE OPERACIÓN POR COMPARACIÓN DE FASE………... 46
Figura 3.1 EVOLUCIÓN DE LOS RELEVADORES DE PROTECCIÓN……….…………. 50
Figura 3.2 RELEVADOR ELECTROMECÁNICO……….………..51
Figura 3.3 RELEVADOR DE ESTADO SÓLIDO………52
Figura 3.4 RELEVADOR DIGITAL………..53
Figura 3.5 ARQUITECTURA DEL RELEVADOR DIGITAL……….54
Figura 3.6 CONVERSIÓN DE UNA SEÑAL ANALÓGICA A DIGITAL………..….……...……55
Figura 3.7 DIAGRAMA DE BLOQUES SIMPLIFICO DEL RELEVADOR MICROPROCESADO……58
Figura 3.8 MUESTREO Y TRANSMISIÓN DE LA CORRIENTE LOCAL EN EL ESQUEMA 87L (ESQUEMA DE INTERRUPTOR Y MEDIO)………. 60
Figura 3.9 CONSOLIDACIÓN DE CORRIENTES EN EL ESQUEMA DE 87L MIENTRAS SE CONSERVA EL ANCHO DE BANDA DEL CANAL………...61
Figura 3.10 CARACTERÍSTICA DE OPERACIÓN TRADICIONAL DEL PLANO ALFA PARA 87L DE ZONA CON DOS CORRIENTES……….63
Figura 3.11 LÍNEA DE TRASMISIÓN CON ESQUEMA DE PROTECCIÓN DIFERENCIAL DE LÍNEA………64
Figura 3.12 RELACIÓN DE CORRIENTE REMOTA ENTRE CORRIENTE LOCAL DENTRO DE LA ZONA DE RESTRICCIÓN DEL PLANO ALFA………...65
Figura 3.13 LÓGICA DE ELEMENTO DIFERENCIAL DE FASE 87LS………...66
Figura 3.14 LÓGICA DE MODO DE SEGURIDAD EXTENDIDA……… 68
Figura 3.15 LÓGICA DE DISPARO RELEVADOR SEL-411L………... 69
Figura 3.16 LÓGICA DE TIEMPO DE OPERACIÓN DE LOS ELEMENTOS DE DISTANCIA FASE Y TIERRA……….………..70
Figura 4.1 LÍNEA DE TRASMISIÓN CORTA DE 230 kV………. 75
Figura 4.2 AJUSTES GLOBALES DE RELEVADOR 411L DEL ESQUEMA DE PROTECCIÓN DIFERENCIAL DE LÍNEA………..76
Figura 4.3 a) AJUSTE 87 HABILITACIÓN DE CANAL………77
Figura 4.3 b) AJUSTE 87 CONFIGURACIÓN DE CANAL PARA RELEVADOR LOCAL……….………78
Figura 4.3 c) AJUSTE 87 CONFIGURACIÓN DE CANAL PARA RELEVADOR REMOTO………..………78
Figura 4.4 CONEXIÓN FÍSICA DE CANALES DE COMUNICACIÓN..………..79
Figura 4.6 CONFIGURACIÓN DE ELEMENTOS DE PROTECCIÓN DEL RELEVADOR……….81
Figura 4.7 PLANO ALFA PARA ELEMENTO DIFERENCIAL DE FASE, SECUENCIA NEGATIVA Y
TIERRA………. 82
Figura 4.8 a) AJUSTE DEL RELEVADOR DE TERMINAL LOCAL PARA DETERMINAR RTC
BASE……….………...83
Figura 4.8 b) AJUSTE DEL RELEVADOR DE TERMINAL REMOTA PARA DETERMINAR RTC
BASE...84
Figura 4.9 CORRIENTE INYECTADA CON EQUIPO DE PRUEBA AL RELEVADOR DE LA
TERMINAL LOCAL Y TERMINAL REMOTA………85
Figura 4.10 MEDICIÓN DE CORRIENTE LOCAL, REMOTA DIFERENCIAL Y VECTOR DEL
PLANO ALFA………86
Figura 4.11 CASO DE FALLA EXTERNA………..86
Figura 4.12 VALORES CORRIENTE INYECTADOS PARA SIMULACIÓN DE FALLA EXTERNA...88
Figura 4.13 VALORES DE CORRIENTE DE PREFALLA, FALLA Y CORRIENTE DIFERENCIAL
MEDIDOS POR EL RELEVADOR PARA EL CASO DE FALLA EXTERNA…. ………….89
Figura 4.14 MEDICIÓN FASORIAL DE LA CORRIENTE LOCAL Y REMOTA EN VALORES EN P.U.
AL MOMENTO DE UNA FALLA EXTERNA, Y MONITOREO DE LOS ELEMENTOS DE PROTECCIÓN DIFERENCIAL DE LÍNEA………... 89
Figura 4.15 CASO DE UN FALLA DENTRO DE LA SECCIÓN DE LA LÍNEA PROTEGIDA………..90
Figura 4.16 VALORES INYECTADOS PARA PRUEBA DE FALLA INTERNA………. 91
Figura 4.17 VALORES DE CORRIENTE DE PREFALLA, FALLA Y CORRIENTE DIFERENCIAL
PARA EL CASO DE NA FALLA INTERNA.………...92
Figura 4.18 FASORES DE CORRIENTE LOCAL Y CORRIENTE REMOTA PARA EL CASO DE
FALLA INTERNA…... 92
Figura 4.19 CONFIGURACIÓN DE LOS PARÁMETROS DE LA LÍNEA EN EL RELEVADOR DE
PROTECCIÓN……… 93
Figura 4.20 AJUSTE DE LOS ALCANCE DE LAS CARACTERÍSTICAS MHO DEL LOS
ELEMENTOS DE DISTANCIA……….94
Figura 4.21 PRUEBAS DE ZONAS DE PROTECCIÓN DEL ELEMENTO DE DISTANCIA……...…96
Figura 4.22 AJUSTES DEL ELEMENTO DE SOBRECORRIENTE DIRECCIONAL………...…...98
Figura 4.23 PRUEBA DEL ELEMENTO DE SOBRECORRIENTE DIRECCIONAL CON DIRECCIÓN
HACIA ADELANTE………99
Figura 4.24 PRUEBA DEL ELEMENTO DE SOBRECORRIENTE DIRECCIONAL CON DIRECCIÓN
Nomenclatura.
SEP Sistema eléctrico de potencia I Corriente
V Tensión
RTC Relación de transformación de corriente RTP Relación de transformación de potencial TC´s Transformadores de corriente
TP´s Transformadores de potencial Inrush Corriente de energización Pick up Corriente de operación T Tiempo
Dial Palanca de tiempo
Icc Corriente de falla o de corto circuito
CA Corriente alterna CD Corriente directa 21 Relevador de distancia 27 Relevador de baja tensión 52 Interruptor de potencia 59 Relevador de sobretensión
67 relevador direccional de sobrecorriente 79 Relevador de recierre
86 Relevador de bloqueo sostenido
87L Relevador de protección diferencial de línea f Frecuencia
CFE Comisión Federal de Electricidad kV kilo volts
DTL Disparo transferido de línea FEM Fuerza electromotriz.
POTT Permisivo de disparo transferido por sobre alcance PUTT Permisivo de disparo transferido por bajo alcance IHM Interfaz humano maquina
Z Impedancia Hz Hertz
TAP Múltiplos de la corriente de operación. PP1 Protección primaria 1
PP2 Protección primaria 2
INTRODUCCIÓN.
A lo largo del tiempo en manera que la tecnología ha avanzado, los relevadores de protección han ido evolucionando, partiendo de los relevadores electromecánicos los cuales fueron sustituidos posteriormente por los relevadores estáticos o de estado sólido, hasta llegar a la actualidad en donde contamos con relevadores basados en microprocesadores los cuales pueden procesar señales filtradas de tal manera que permiten detectar un condición de falla en el sistema en tiempos menores a un ciclo. Con esto se ha conseguido aumentar la rapidez de operación en las protecciones, el nivel de confiabilidad e incluso la seguridad de operación de los sistemas de potencia, debido a que los relevadores microprocesados que se utilizan dentro de los esquemas de protección en la actualidad, también llamados relevadores multifunción cuentan con funciones adicionales a las de protección. Estas funciones pueden ser de control, automatización y monitoreo, dichas funciones permiten operar al sistema de potencia vía remota sin la necesidad de la intervención de operarios. A pesar de que los relevadores cada vez son mejores y esto hace que las operaciones incorrectas sean cada vez menos, aun no existe algún relevador que sea autoajustable por lo tanto la parte de pruebas a los ajustes de las funciones de protección del relevador es algo que no se puede omitir por ningún motivo. Cada vez que se ponga en servicio un nuevo dispositivo de protección y se tenga que configurar los parámetros de protección se debe de probar su correcto funcionamiento, para lo cual se le deben de realizar una serie de pruebas a los ajuste de pick-ups, características y tiempos de operación de cada función. De esta manera estar prácticamente seguro que la protección va operar correctamente a una condición de falla o permanecerá inmune para una condición normal del sistema o alguna falla para la cual no haya sido destinado.
Dentro del sistema de potencia uno de los elementos más vulnerables a fallas son las líneas de trasmisión, ya que debido a su longitud se encuentran expuestas a diversas condiciones las cuales pudieran llega a generar una falla, algunas de las condiciones a las que se encuentran expuesta son las climatológicas, ambientales, atmosféricas e incluso de las del terreno por donde cruzan.
guarda caído, vandalismo, o por contacto de las líneas con la vegetación del terreno y quema de caña.
Los requerimientos básicos para el diseño de una protección de línea van de acuerdo a la filosofía de protección, que es un compendio de criterios basados en factores como las características del sistema, los requerimientos exigidos al esquema de protección y el tipo de esquema en el cual se materializara dicha filosofía.
Esta filosofía está basada en la experiencia, la práctica desarrollada, la planeación, diseño, operación del sistema y la experiencia adquirida. Es por eso que algunos de los esquemas de protección aplicados a los sistemas de potencia pueden diferir aun cuando la topología de la red sea muy similar, esto depende del criterio y la filosofía que se haya utilizado al momento de realizar el diseño del esquema de protección, además de las características de los elementos del sistema.
Para este caso de aplicación del relevador microprocesado a una línea corta de 230 KV los requerimientos y filosofía protección que se siguieron son los que se establecen en la NFR-041-CFE de ahí se tomo la referencia para las funciones de protección que se emplean en un esquema de este tipo.
OBJETIVO DE LA TESIS.
Conocer el relevador de tipo microprocesado para su aplicación en un esquema
de protección de línea corta de un nivel de tensión de 230 KV; en cuanto a su
uso, la manera de ajustarlo y las pruebas que se deben de realizar para ponerlo
en servicio dentro del esquema de protección.
PLANTEAMIENTO DEL PROBLEMA.
prevenir solo se pueden liberar hasta después que éstas ocurran; se busca que los relevadores operen de la manera más segura y rápida posible ante la existencia de una falla. Debido a esto, se recurre a la protección por relevadores, que a lo largo de los años han ido evolucionando y se han convertido en dispositivos más completos en su funcionamiento, pero debido a esto también ha cambiado la manera de ajustarlos o programarlos. En la actualidad gran parte de las operaciones incorrectas de las protecciones son originadas por el mal ajuste de los relevadores de protección, los cuales son ajustados de manera incorrecta en ocasiones por error en la interpretación de los ajustes y por desconocimiento en la manera de ajustarlos. Si el personal encargado de la instalación y puesta en servicio de los relevadores no cuenta con el conocimiento y la capacitación adecuada sobre el funcionamiento del relevador de protección a instalar, puede tener como consecuencias que una protección opere en falso. Cuando no se tiene conocimiento completo del funcionamiento de un relevador de protección la mayoría de las ocasiones es ajustado mal o se omiten ciertos ajustes que son fundamentales para su operación. Al momento de realizar las pruebas de puesta en servicio estos errores pueden ser detectados, sin embargo debido a la complejidad de los relevadores microprocesados si se trata de elementos o funciones del relevador los cuales tienen una lógica de operación muy extensa y no se interpreta de manera correcta, puede existir la posibilidad que al momento de realizar las pruebas no se detecten estos errores.
JUSTIFICACIÓN.
continuidad del servicio para los usuarios finales, esto último es muy importante desde el punto de vista económico ya que la perdida de energía que es transmitida por una línea es la suficiente para abastecer toda una región en donde puede haber consumidores industriales, comerciales y residenciales. Derivado de la importancia de la protección de líneas de transmisión surge la necesidad de estudiar las nuevas tecnologías de protección por relevadores que se pueden emplear para su protección y la manera de darles una correcta aplicación.
ESTADO DEL ARTE.
Algunos de los centros prominentes en investigación en relevadores digitales han sido la Universidad de Missouri, el Colegio Imperial de Ciencia y Tecnología en Londres, la Universidad de Calgary, la Universidad de Saskatchewan y la Universidad de Manitoba [6]. Los relevadores digitales presentan las ventajas de ser más rápidos en su operación, más versátiles al poder modificar y adaptar su lógica de operación, además de ser más económicos. Estos dispositivos también ofrecen la posibilidad de tener un autodiagnostico que puede ser enviado en forma remota a través de un canal de comunicación a una estación central para poder saber cuando tiene un error en su funcionamiento, facilitando de esta manera el mantenimiento lo que aumenta su confiabilidad. Aunado a lo anterior algunos de estos dispositivos ofrecen la facilidad de enviar los datos de entrada, memoria de los datos de falla, cálculo de la distancia en donde ocurrió la falla en forma de reporte para un análisis posterior y la facilidad de cambiar ajustes en forma remota [5].
La probabilidad de fallas en la línea, causadas por relámpagos, son de 0.2 - 3 fallas cada 100 km al año. A esto habría que añadir las averías causadas por la contaminación, niebla salina, conductores oscilantes, dispositivos de elevación que tocan los conductores. En la mayoría de los casos las fallas de los rayos son muy dominantes [1].
APORTACION DE LA TESIS.
Las aportaciones más importantes del desarrollo de este trabajo de tesis son:
Dar a conocer el avance tecnológico en los relevadores de protección que se
utilizan en la actualidad dentro de los esquemas de protección.
Se explica la teoría del funcionamiento lógico de las funciones de protección de
los relevadores microprocesados aplicables a esquemas de protección
normalizados.
Se dan a conocer los criterios más importantes que se deben de tomar en
cuenta en los ajustes y pruebas de las funciones de protección de un relevador
microprocesado para su puesta en servicio.
El estudio económico y factibilidad de la aplicación de un relevador
microprocesado a un esquema de protección.
ESTRUCTURA DE LA TESIS.
A continuación se describe brevemente la estructura y el contenido de cada uno de los capítulos que integran el presente trabajo de tesis.
Capitulo 1. Se explica de manera general los aspectos más importantes de la protección por
relevadores, desde los conceptos básicos hasta la aplicación de las protecciones en arreglos
Capitulo 2. En este capítulo se estudia la protección de líneas de transmisión desde el
punto de vista teórico, el tipo de funciones de protección que se utilizan para protegerlas y el ajuste de sus elementos de protección.
Capitulo 3. Se describen los componentes de un relevador microprocesado, se analizan las
funciones de protección que se aplican a un esquema de protección de línea corta como protección primaria uno y protección primaria dos, también se estudia parte de la lógica de operación de estas funciones.
Capitulo 4. Se realizan pruebas de puesta en servicio a las funciones de protección del
relevador microprocesado que se utilizan como protección primaria uno y protección primaria dos dentro de los esquemas de protección de línea corta en 230 KV normalizados.
Capitulo 5. Se presentan las conclusiones y recomendaciones para trabajos futuros y se
Capítulo 1:
GENERALIDADES DE LA PROTECCIÓN POR RELEVADORES.
1.1 INTRODUCCIÓN.
Los esquemas de protección por relevadores se diseñan para operar sin la intervención humana, debido a que una de sus características esenciales es la rapidez de respuesta con que operan, la función principal de los relevadores dentro de los SEP es determinar lo más pronto posible la existencia de una falla en el sistema para enviar la señal a los interruptores.
Los relevadores no solo deben de ser operación rápida también deben de ser precisos en la forma de actuar es decir deben de distinguir entre una corriente falla y algunas otras anormalidades momentáneas o transitorias como corrientes de arranque de distintos equipos como transformadores, motores etc.
1.2 CONDICIONES DE OPERACIÓN DE UN S. E. P. DURANTE SU PROCESO DE EXPLOTACIÓN.
RÉGIMEN NORMAL O ESTADO ESTABLE.
RÉGIMEN ANORMAL.
• Sobrecarga: Las sobrecargas es la conducción de corriente mayor al flujo de corriente nominal y esta puede ser provocada por calentamiento sin embargo la corriente sigue circulando por el conductor o el equipo hasta el grado de quemarlo si es que no actúa a tiempo una protección por lo tanto las sobrecargas son de un tiempo de duración mayor al de una de corriente de cortocircuito y de un magnitud menor.
• Oscilaciones de potencia y pérdidas de sincronismo: las oscilaciones de potencia son un régimen anormal originado como consecuencia de la desconexión tardía de un cortocircuito, por la desconexión de una línea de enlace o por la de una planta generadora.
• Corrientes de magnetización: es una condición transitoria que ocurre al energizar un transformador, cuando el tensión aumenta rápidamente después de aislar una falla o cuando se energizan dos transformadores en paralelo, estas corrientes son aproximadamente del orden de 7 veces la corriente nominal.
FALLA (corto-circuito).
• Un cortocircuito es una falla que ocurre entre fase y neutro o tierra, y entre fases al cerrarse o unirse los conductores en un punto del circuito, ya que al ocurrir un cortocircuito la corriente toma la trayectoria más corta, esto es debido a la falta de aislamiento, arco eléctrico o algún disturbio que provoque la unión de los conductores.
Al ocurrir un cortocircuito la tensión tiende a cero y la corriente se eleva aproximadamente a valores mayores al 400% de la corriente nominal.
1.3 FUNCIÓN DE LA PROTECCIÓN.
La función de la protección es desconectar automáticamente lo más rápido posible el elemento fallado del (SEP) cuando este sufra una falla del tipo interna o externa y funcione forma anormal que le pueda ocasionar un daño al sistema.
Otra de las funciones de la protección por relevadores es indicar el tipo, la magnitud y el lugar en donde ocurrió la falla. Cabe mencionar que los relevadores son solo el equipo que detecta la falla para mandar la señal de disparo a los interruptores los cuales son los encargados de desconectar la parte del sistema que puede ser dañada por la falla.
1.4 CARACTERISTICAS DE LA PROTECCIÓN.
SELECTIVIDAD
La selectividad es el requerimiento de los relevadores de no operar para fallas que no hayan sido destinados. Este término describe el funcionamiento interrelacionado de relevadores, interruptores y otros dispositivos de protección. La selectividad total se obtiene cuando se desconecta del sistema la mínima cantidad de elementos o equipos en condiciones de falla u operando en condición anormal.
CONFIABILIDAD
La confiabilidad de un sistema se refiere al grado de certeza que ofrece un elemento o sistema de operar correctamente, o cumplir satisfactoriamente la función para la cual fue destinado. En caso de los relevadores, a diferencia de otros equipos, se tienen dos circunstancias en las que puedan dejar de ser confiables: en la primera, pueden dejar de operar cuando se espere que lo hagan, para evaluar la confiabilidad de la protección se
divide en dos aspectos: la dependabilidad y la seguridad. La dependabilidad se define
como el grado de certeza de que un relevador o el sistema de protección operarán
correctamente para todas las fallas para las cuales fue diseñado. La seguridad se define
como el grado de certeza de que un relevador o sistema de protección no operará para una
condición anormal para la cual no fue diseñado.
RAPIDEZ
Si existiera un dispositivo de operación que pudiera anticiparse a una falla sería una utopía incluso si estuviera disponible, habría siempre duda sobre su decisión para determinar con certeza si una falla o problema requiere de un disparo.
El desarrollo de dispositivos de protección más rápidos debe de ser siempre evaluado en comparación al incremento en la probabilidad de un mayor número de operaciones no deseadas o inexplicables.
El tiempo es un excelente criterio para descartar entre un problema real y uno falso.
Aplicando esta característica en particular a un dispositivo de protección. La alta velocidad indica que el tiempo usual de operación no excede los 50 milisegundos (3 ciclos). El término instantáneo indica que ningún retardo es introducido a propósito en la operación. En la práctica, alta velocidad e instantáneo son usados de manera indistinta.
SIMPLICIDAD
Como cualquier otra disciplina de la ingeniería la simplicidad en un esquema de protección es siempre la marca de un buen diseño. El esquema de protección más simple no siempre es el más económico.
La simplicidad en el diseño mejora la protección del sistema ya que si existen pocos elementos que puedan representar una mala operación.
ECONOMÍA
Un dispositivo de protección que tiene una zona de protección perfectamente definida prevé una mayor selectividad pero generalmente su costo es mayor. Los dispositivos de protección de alta velocidad ofrecen una mayor continuidad del servicio al reducir los daños provocados por una falla y los riesgos del personal, por lo tanto tienen un costo inicial mayor.
El más alto desempeño y costo no siempre pueden ser justificados. Consecuentemente dispositivos de protección de baja y alta velocidad son utilizados para proteger un sistema eléctrico. Ambos tipos pueden proporcionar una alta confiabilidad.
1.5 QUÉ ES UN RELEVADOR
El relevador de protección es un mecanismo eléctrico el cual está diseñado para censar e interpretar señales de entrada de condiciones específicas de falla del elemento protegido y obtener una respuesta a la salida las cuales provocan una operación en los interruptores para desconectar automáticamente al elemento protegido.
En la actualidad existen relevadores que realizan un informe a detalle de todo lo que ocurrió durante la falla como por ejemplo medición, registrador de eventos, señalización, tipo y localización de la falla.
1.6 PRINCIPIO DE LA PROTECCIÓN POR RELEVADORES.
Antes de hablar del principio de la protección por relevadores es necesario aclarar que este tipo de protecciones no previene ni predice las fallas ya que los relevadores de protección solo actúan después de haber ocurrido la falla sin embargo minimiza la duración de los problemas, daños y tiempos fuera de servicio.
Un esquema de protección por relevadores se divide en dos subsistemas que son:
o PRIMARIA
1.6.1. PROTECCIÓN PRIMARIA.
En el esquema de protección también llamada primera línea de protección la cual se representa en zonas de protección que son regiones del sistema de potencia para las cuales el esquema debe de operar, dentro de estas zonas de protección se encuentran los interruptores ya que estos equipos son los que seccionan el sistema en segmentos y los relevadores son los encargados de enviar instantáneamente la señal de disparo a los interruptores en caso de detectar un falla dentro de la zona de protección.
En los sistemas de extra alta tensión es común duplicar los esquemas de protección primaria para prevenir la falla en cualquier elemento del primer esquema comúnmente se usan equipos de diferentes fabricantes para evitar que tengan una inadecuada operación por la misma falla, cuando se duplica la protección el tiempo de operación de ambos esquemas es el mismo. En la figura 1.1 se observa un sistema eléctrico con sus zonas de protección [4].
Figura 1.1 Zonas de protección de los sistemas eléctricos de potencia.
1. Zona de protección del generador.
2. Zona de protección del transformador.
3. Zona de protección de la barra.
4. Zona de protección de líneas de transmisión o de distribución.
5. Zona de protección del motor.
Un relevador es considerado seguro si responde solamente a las fallas que ocurren dentro de sus zonas de protección.
Con la finalidad de lograr una protección integra al sistema eléctrico las zonas de protección deben de tener las siguientes características:
o Todos los elementos del sistema deben estar incluidos en por lo menos una zona
de protección. Y las protecciones más importantes deben estar incluidas en al menos dos zonas protegidas.
o Las zonas de protección deben de traslaparse con la finalidad que ningún
elemento se quede sin proteger, el traslape entre zonas de protección debe de ser pequeña de tal manera que la ocurrencia de falla en esta zona sea mínima [4].
1.6.2. PROTECCIÓN DE RESPALDO.
Por otra parte debido a que los esquemas de protección deben de ser lo más confiables posibles, es necesario no descartar la posibilidad de que por alguna razón falle alguno de los elementos de la protección, es por eso que para hacer aun más confiable los elementos de protección se recurre a los denominados relevadores de respaldo que son los encargados de actuar en caso de que lleguen a fallar o que no operen los relevadores primarios.
Existen otro tipo de relevadores de respaldo como por ejemplo los relevadores de respaldo local los cuales en caso de que la protección primaria no opere después de determinado tiempo de retardo y la falla no haya sido liberada mandan una señal de apertura al interruptor para liberar la zona fallada.
Los relevadores de respaldo representan una segunda línea de protección contra corrientes de corto circuito.
Existe una tercera línea de protección que es la protección remota la cual consiste en zonas de ´protección separadas uno o dos barras más allá del área que protegen, los relevadores de protección remota utilizan retardos de tiempo en su operación y así darle oportunidad a los relevadores primarios y a los de respaldo que operen primero. Para proteger a un sistema
eléctrico con protección primaria, de respaldo y remota, es necesario hablar de la velocidad
de operación de los relevadores los cuales se clasifican de la siguiente manera de acuerdo a
la velocidad de operación:
1. Relevadores instantáneos. Son aquellos que operan tan pronto tomen la
decisión y su rapidez varia de un ciclo a un segundo dependiendo de su construcción.
2. Relevadores con retraso de tiempo. Son aquellos en los que se introduce un
retraso de tiempo entre el momento que se toma la decisión de operar y la acción efectiva de desconexión. Los retrasos de tiempo dependen de la construcción del dispositivo.
3. Relevadores de alta velocidad. Que son relevadores que operan debajo de un
tiempo específico; con la tecnología actual el tiempo es menor de 50 milisegundos o tres ciclos en sistemas de 60 Hz.
4. Relevadores de ultra-alta velocidad. Que son dispositivos que operan
instantáneamente, el tiempo de operación es de menos de 4 milisegundos.
1.7 ELEMENTOS BÁSICOS DE UN ESQUEMA DE PROTECCIÓN.
Un sistema de protección consta de subsistemas los cuales se encargan de la detección y la solución de la falla, los principales subsistemas por los cuales está constituido un sistema de protección son: transductores, relevadores, baterías e interruptores [4]:
1. Transductores: los transductores son transformadores de corriente y tensión
los cuales se encargan de suministrar las señales de entrada que reciben los relevadores [4].
2. Relevadores: son los elementos que deciden el momento de ejecutar la
operación de conexión o desconexión de elementos del sistema [4].
3. Banco de baterías: los bancos de baterías garantizan la existencia de tensión
de operación en caso de fallas cercanas a una instalación y pueda provocar tensiones a normales a las de corriente alterna de una subestación. Estos bancos se conectan permanentemente a un sistema de recarga a la línea de corriente alterna de la subestación, y en condiciones normales, se cargan por medio de este cargador. El cargador debe de tener capacidad suficiente para mantener a todas las cargas que se alimentan por el banco de baterías. A su vez, los bancos se dimensionan para mantenerse en operación normalmente durante 8 a 12 horas después de un apagón total. Aunque los bancos de baterías son confiables, en ocasiones y en subestaciones importantes estos equipos se duplican para garantizar la operación correcta del sistema eléctrico de potencia [4].
4. Interruptores: la liberación de una falla en un sistema de potencia depende de
falla de 100,000 amperes, en la figura 1.2 se muestran los elementos que forman un sistema de protección [4].
5. Comunicación: el canal de comunicación en un esquema de protección
diferencial de línea es requerido para el intercambio de información de corrientes que circula por la línea y para hacer la comparación de dirección y fase de las corrientes que se encuentran entrando contra las que salen de la línea, también es utilizado para la transferencia de disparos hacia los
interruptores de la terminal remota de línea.
Figura 1.2 Elementos básicos de un sistema de protección.
1.8 CONCEPTOS BÁSICOS DE LA PROTECCIÓN POR RELEVADORES.
Dado que el objeto de un esquema de protección es detectar fallas o condiciones de regímenes anormales de operación, los relevadores deben evaluar una gran variedad de parámetros para establecer la acción correcta requerida. Generalmente, se utiliza la información de las corrientes y tensiones en las terminales del equipo protegido, o en la frontera de la zona adecuada. Algunas veces se utilizan también información de contactos (abierto-cerrado) o “switches”. Aunque un relevador se puede diseñar para responder a diferentes señales, el problema de los esquemas de protección es definir las cantidades que diferencian una condición normal de una anormal. En el contexto, de un esquema de protección, una condición “anormal” significa que el disturbio esta fuera de la zona de protección.
INT E RR UP TO R
INTERRUPTOR TRANSDUCTOR
BATERIA
El campo de protección de los sistemas eléctricos de potencia tiene una antigüedad de 70 u 80 años. Las diversas técnicas disponibles para proteger un sistema han evolucionado en todo este tiempo, y se conocen las limitaciones de los esquemas de protección; inicialmente se construyeron relevadores electromecánicos, posteriormente se construyeron los relevadores de estado sólido en los años sesenta, y actualmente se desarrollaron los relevadores digitales o esquemas de protección computarizados [4].
1.8.1 DETECCIÓN DE FALLAS.
Durante una falla, generalmente se observan aumentos en las magnitudes de corriente y abatimientos de tensión. Además se pueden observar cambios en los diferentes parámetros tales como ángulos de fase de fasores de corriente y tensión, componentes armónicos de las mismas señales, potencias activas y reactivas, frecuencias del sistema, entre otras. El principio de la operación de relevadores se basa en la detección de estos cambios e identificando los cambios con posibilidad que pueda existir una falla dentro de la protección asignada a los relevadores [4].
Las principales técnicas utilizadas en los sistemas de protección son los siguientes.
1.8.2 DETECCIÓN DE NIVEL DE AJUSTE.
Figura 1.3 Grafica de tiempo de operación del relevador detector de nivel.
1.9 DIAGRAMAS ESQUEMTICOS DE PROTECCION PARA LINEAS DE TRANSMISION.
A continuación se discute la aplicación y los requerimientos con los que debe cumplir un relevador para ser instalado y operar como protección de un esquema de línea corta en un nivel de tensión de 230 kV de acuerdo a las especificaciones de CFE, las cuales se tomaron como referencia para definir las características técnicas que debe cumplir los esquemas de protección en donde se instalan esta clase de equipos.
De acuerdo a lo establecido dentro de la especificación NFR-041-CFE se definirá el esquema de protección de línea que se utiliza en la mayoría de las líneas de transmisión de este tipo que se encuentran en operación dentro del país, ya que esta norma aplica para todos los esquemas de protección de líneas de transmisión, subtransmisión y distribución, de enlace, radiales y de tensiones desde 69kV hasta 400kV.
1.9.1 CARACTERISTICAS GENERALES DE LOS ESQUEMAS DE PROTECCIÓN DE LINEA CORTA 87L (PP1, PP2 en 400KV y 230 KV).
Para normalizar los esquemas de protección de línea para transmisión y distribución con tensiones de operación de 69 kV o mayores se han considerado las siguientes características.
La clasificación de las líneas de acuerdo a su longitud se toma en cuenta de la siguiente manera:
• Línea larga > 40 Km.
• Línea corta ≤ 15 Km.
Además de que se debe de considerar que los esquemas de protección para líneas de trasmisión con tensiones de 400 kV y 230kV, deben de contar con las siguientes protecciones PP1 (protección primaria 1) PP2 (protección primaria 2) PR (protección de respaldo) 50FI (protección contra falla de interruptor).
Con respecto al tiempo de operación para la protección tanto para PP1 como para PP2 deben de operar en un tiempo menor a 100 milisegundos. Algunas de otras características con que debe de contar estos esquemas son:
• Disparo monopolar, con salidas independientes de disparo por polo y
para disparo tripolar.
• Lógica de arranque monopolar y tripolar del relevador de falla de
interruptor.
• Lógica de arranque monopolar y tripolar del relevador de recierre.
• Tiempo de operación de los relevadores. Si PP1 y PP2 son 87L aplica
tiempo de operación de PP1.
Los relevadores utilizados para esquemas de protección diferencial de línea 87L (PP1, PP2 en 400 kV y 230 kV) deben de cumplir con las siguientes características:
• El relevador diferencial debe contar con alarma y bloqueo por falla de
canal.
• Bloqueo por asimetría con un ajuste minino de 5 ms. Cuando se solicite
el relevador debe contar con compensación de asimetría de canal utilizando GPS.
• El relevador diferencial debe soportar una latencia (retardo temporal)
mínima de 16 ms y contar con alarma y bloqueo por retardo de canal.
• Contará con funciones adicionales de protección de distancia con al
• Compensación interna mediante ajustes del relevador para diferentes relaciones de TC’s en las terminales de la línea.
• Operación monopolar.
• Función de autodiagnóstico.
• La salida del relevador para comunicación con su extremo remoto,
siempre debe ser óptica.
• Localización de fallas
• Esquema de línea muerta (función de disparo instantáneo contra
energización de línea aterrizada o con falla).
• El relevador debe de contar con un ajuste que compense la potencia
reactiva de la línea sin carga, para aplicaciones mayores a 40 Km.
Para aplicaciones con fibra óptica dedicada, el relevador debe contar con rangos de potencia óptica para corto alcance (0-15km) y largo alcance (15-40 km) así como la sensibilidad óptica necesaria (para evitar saturación o quedar por debajo del umbral de sensibilidad) de acuerdo con las características de la fibra y la longitud óptica que se establezcan [8].
debe de estar preparado para operar con lógica POTT con inversión de carga y con unidad de operación direccional de secuencia negativa, cuando así se requiera.
Con respecto a la protección de falla de interruptor 50FI para este tipo de esquemas de protección en tensiones de 400 y 230 kV debe de ser un relevador independiente y no se acepta que cuente con funciones adicionales de protección excepto 86FI y deben de cumplir con las siguientes características; tres unidades de medición de corriente de fase para esquemas de líneas de transmisión con lógica de arranque por disparo monopolar y tripolar y con salida de redisparo por fase y una de disparo tripolar y con temporizadores independientes para funciones de redisparo y disparo.
El esquema de protección para interruptores de líneas de transmisión y de generador debe de contar con una función de protección contra arqueo interno o externo del interruptor, cuando se solicite.
En la figura 1.4 se muestra el diagrama unifilar del arreglo de teleprotección para líneas en
400 kV y 230 kV para líneas ≤ 10 Km y en la figura 1.5 el diagrama unifilar del arreglo de
Figura 1.4 Arreglo normalizado de teleprotección para líneas en 400 kV y 230 kV ≤ 10 km, con medio de comunicación principal fibra óptica dedicada y respaldo fibra óptica dedicada
(PP1- 87L/21/67 y PP2- 87L/21/67)
S1 S2 S3 S4 S5 S6 S8 S7
PP1 PP2 RD MED 50FI 87B PP1 RD PP2
50FI Y RD
S1 S2 S3 S4 S5 S6 S8 S7 PP1 PP2 RD MED 50FI 87B PP1 RD PP2
50FI Y RD
RX TX RX TX RX TX 87L
400 KV Ó 230 KV 400 KV Ó 230 KV
LINEA CORTA <15KM
PP1 ESQUEMAS DISCRETOS DTD DTL RX TX RX TX RX TX 87L PP1 ESQUEMAS DISCRETOS DTD DTL RX TX RX TX RX TX 87L PP2 ESQUEMAS DISCRETOS DTD DTL RX TX RX TX RX TX 87L PP2 ESQUEMAS DISCRETOS DTD DTL OPGW, primer guarda de la línea
OPGW, segunda guarda de la línea fibra optica dedicada
Figura 1.5 Arreglo normalizado de teleprotección para líneas en 400 kV y 230 kV ≤ 15 km, con medio de comunicación principal fibra óptica dedicada y respaldo fibra óptica
multiplexada (PP1- 87L/21/67 y PP2- 87L/21/67) [8].
EDT ETO MUX 87L PP2 OTROS SERVICIOS
S1 S2 S3 S4 S5 S6 S8 S7
PP1 PP2 RD MED 50FI 87B PP1 RD PP2
50FI Y RD
S1 S2 S3 S4 S5 S6 S8 S7 PP1 PP2 RD MED 50FI 87B PP1 RD PP2
50FI Y RD
RX TX RX TX RX TX 87L
400 KV Ó 230 KV 400 KV Ó 230 KV
LINEA CORTA <15KM
PP1 ESQUEMAS DISCRETOS DTD DTL RX TX RX TX RX TX 87L PP1 ESQUEMAS DISCRETOS DTD DTL OPGW, primer guarda de la línea
fibra optica dedicada
ESQUEMAS DISCRETOS DTD DTL ESQUEMAS DISCRETOS DTD DTL EDT ETO MUX 87L PP2 OTROS SERVICIOS OPGW, diferente al de la línea protegida
Capítulo 2:
PROTECCION DE LINEAS.
2.1 INTRODUCCIÓN.
En los sistemas eléctricos de potencia, las líneas son las que proveen la conexión entre varias partes del sistema y permiten asociar a los equipos, la potencia generada en bajas tensiones es elevada a altas tensiones para ser trasmitida a varias estaciones en donde es reducida a valores de tensiones para la distribución a industrias, comercios y usuarios residenciales. Todo este proceso de traslado de energía desde las centrales generadoras hasta el usuario final no se podría llevar a cabo sin un correcto funcionamiento de las líneas de trasmisión, por lo tanto la seguridad, la confiabilidad y la continuidad del servicio depende en gran parte del correcto funcionamiento de estas líneas, para que esto se pueda ser posible gran parte dependen de un correcto diseño del esquema de protección. En este capítulo se habla acerca de lo relevadores protección que pueden ser utilizados en los esquemas de protección de línea así como algunas consideraciones que se deben de tomar en cuenta para implementar un esquema de protección de línea.
2.2 REQUERIMENTOS Y FACTORES QUE SE DEBEN DE TOMAR ENCUENTA PARA EL DISEÑO DE UN ESQUEMA DE PROTECCION DE LINEA.
Los requerimientos básicos para una protección de línea deben de ser selectivos, es decir únicamente librara el tramo de línea afectado por la falla, deberán de operar de manera rápida de tal manera que el riesgo para el personal, el daño en los equipos se reduzca al mínimo y se eviten problemas de estabilidad [2].
continuidad del servicio y el tiempo que se requiere para liberar una falla en ese nivel de tensión. Un requerimiento importante también es la compatibilidad con el equipo existe y sistemas adyacentes [3].
2.3 PROTECCIÓN DE LINEAS CON RELEVADORES DE SOBRECORRIENTE. Los relevadores de sobrecorriente se utilizan generalmente en redes del sistema por debajo de 70 kV de alimentación donde la aportación a la falla es en una sola dirección y el tiempo de operación es relativamente largo es aceptable. En líneas de transmisión con niveles de tensión mayor, los relevadores de corriente direccionales o no direccionales, se utilizan como respaldo a los relevadores de instantáneos de protección primaria.
La protección de sobrecorriente funcionara como una copia de seguridad para la protección primaria y para tipos especiales de fallas, como fallas de alta resistencia a tierra, que no puedan ser detectadas por la protección primaria [1].
Las líneas están protegidas por relevadores de sobrecorriente, distancia o relevador equipado por hilo piloto dependiendo los requerimientos. El relevador de sobrecorriente es el más simple y más barato, el más difícil de aplicar y necesita ser reajustado en cuanto cambian las condiciones del sistema. Es generalmente usada para la protección de fallas de fase y de fase a tierra.
2.3.1 AJUSTE DE RELEVADOR DE SOBRECORRIENTE TEMPORIZADO DE FASE 50PT.
El tiempo de funcionamiento de un relevador de sobrecorriente tiene que ser retrasado para garantizar que, en presencia de un fallo, el relevador no opera antes de que cualquier otro tipo de protección situada más cerca del punto de falla. Los relevadores de tiempo definido y relevadores de tiempo inverso se puede ajustar mediante la selección de dos parámetros: dial de tiempo o ajuste del multiplicador de tiempo, y el pick-up o de ajuste tap.
AJUSTE DE PICK-UP (CORRIENTE DE ARRANQUE)
configuración pick-up está determinada por lo que permite un margen de sobrecarga por encima de la corriente nominal, como en la siguiente expresión:
OLF X Inom
RTC
DONDE:
OLF = factor de sobrecarga que depende del elemento protegido Inom = vlor de corriente nominal del circuito.
Relación CTR = relación de transformación de corriente.
El factor de sobrecarga recomendado para motores es 1,05. Para las líneas, transformadores y generadores es normalmente en el intervalo de 1,25 a 1,5. En los sistemas de distribución en los que es posible aumentar la carga en los alimentadores en condiciones de emergencia, el factor de sobrecarga puede ser del orden de 2. En cualquier caso Inom tiene que ser más pequeño que los de la TC´s y la capacidad térmica del conductor; de lo contrario el valor más pequeño tiene que ser tomada para el cálculo del ajuste de activación. Para relevadores de falla a tierra, el ajuste de pick-up se determina teniendo en cuenta el desequilibrio máximo que existiría en el sistema en condiciones normales de funcionamiento. Una asignación típica de desequilibrio es 20 por ciento de manera que la expresión en la ecuación.
En líneas de transmisión de alta tensión el dezbalace podría bajar a 10 por ciento, mientras que en la distribución rural alimentadores el valor podría ser tan alto como 30 por ciento. AJUSTE DE TIME DIAL (PALANCA DE TIEMPO)
2.3.2 AJUSTE DE RELEVADOR DE SOBRECORRIENTE TEMPORIZADO DE TIERRA 50GT.
La corriente mínima de operación (pickup) debe de ajustarse por encima del máximo desbalance de secuencia cero que pueda existir y que pueda ser tolerado por el sistema. Este desequilibrio es generalmente el resultado de una corriente de carga desigual de una sola fase o entre fases. Con excepción de los problemas de coordinación con fusibles, las protecciones de sobrecorriente de tierra se ajustan por debajo de las protecciones de fase. Por lo general se utilizan 0.5 y 1.0 donde el desbalance de corriente es bajo, especialmente en niveles de baja tensión [9].
2.3.3 AJUSTE DE RELEVADOR DE SOBRECORRIENTE INSTANTANEO DE FASE Y TIERRA 50P Y 50G.
El criterio para el establecimiento del ajuste de unidades instantáneas varía dependiendo de la ubicación y el tipo de elemento del sistema que está siendo protegido. Estos grupos pueden ser: líneas entre subestaciones, líneas de distribución y transformadores.
LINES ENTRE SUBESCIONES. Para el ajuste de estas unidades se considera al menos el 125 por ciento del nivel de corriente de falla máxima asimétrica r.m.s en la siguiente subestación. Cuando las características de dos relevadores se cruzan en un nivel de fallo del sistema en particular, por lo que es difícil de obtener la correcta coordinación, que es necesario para establecer la unidad instantánea del relé en la subestación que está más lejos de la fuente a un valor tal que el relé opera para un nivel ligeramente inferior de la corriente, evitando así la pérdida de la coordinación. El margen del 25 por ciento evita la superposición de la unidad instantánea aguas abajo si un considerable componente de CC está presente.
LINEAS DE DISTRIBUCIÓN. La configuración del elemento instantáneo de relés en las líneas de distribución que abastecen sólo transformadores MT / BT es tratado diferente al de líneas entre subestaciones, estas líneas no tienen que satisfacer las mismas condiciones de coordinación que tienen que ser satisfechas por líneas entre subestaciones y así uno de los dos valores siguientes se pueden utilizar para establecer estas unidades:
2. Entre seis y diez veces el valor nominal máximo circuito. UNIDADES DE TRANSFORMADORES
Las unidades instantáneas de los relevadores de sobrecorriente instalados en el lado primario de los transformadores deben fijarse en un valor entre t 25 y 150 por ciento de la corriente de cortocircuito existente en el juego de barras en el lado de baja tensión, que se refiere a la parte de alta tensión . Este valor es más alto que los mencionados anteriormente para evitar la falta de coordinación con las corrientes más altas encontrado debido a la corriente de inrush cuando se energizar el transformador.
Si las unidades instantáneas de la secundario del transformador de devanado de protección contra sobrecorriente y los relés de alimentación se someten al mismo nivel de cortocircuito, entonces las unidades instantáneas de transformadores necesitan ser anuladas para evitar la pérdida de la selectividad a menos que existan enlaces de comunicación entre estas unidades que pueden permitir la desahabilitación de la protección instantanea de sobrecorriente del transformador para fallas detectadas por la unidad instantánea de sobrecorriente del alimentador.
2.4 RELEVADOR DE SOBRECORRIENTE DIRECCIONAL 67.
Los relés de sobrecorriente direccionales de fases a tierra son controlados por una unidad direccional, con lo cual sólo responden a fallas en una dirección.
Son de operación instantánea o temporizada y su función normalmente se prefiere como protección de respaldo con la debida coordinación.
Los sobrecorrientes direccionales de tierra o residuales, son a su vez de secuencia cero o de secuencia negativa, cada uno con sus respectivas ventajas. Este tipo de relevador se usa como protección sensitiva contra fallas a tierra de alta impedancia en cooperación con esquemas de teleprotección [10].
2.4.1 SOBRECORRIENTE DE TIERRA DE SECUENCIA CERO.
esquemas de teleprotección se obtiene un cubrimiento más rápido y mejor para fallas resistivas a tierra.
• Ventajas: provee muy buen cubrimiento a fallas resistivas; fácil de ajustar, entender
y visualizar; no los afecta la carga puesto que ésta tiene un impacto pequeño en la magnitud de la corriente de secuencia cero
• Desventajas: se ven afectados por los cambios de la fuente; los afecta el
acoplamiento mutuo de secuencia cero; los afecta el desbalance de carga; impacto negativo de los conductores de fase abiertos [10].
2.4.2 SOBRECORRIENTE A TIERRA DE SECUENCIA NEGATIVA.
Los relevdores de sobrecorriente de secuencia negativa han ganado popularidad como método para la detección de fallas a tierra de alta impedancia. La corriente de secuencia negativa aparece siempre que se presenten desbalances en el sistema. Las fuentes principales de desbalance son las fallas asimétricas, líneas no transpuestas, y cargas desbalanceadas. Como en el caso de los sobrecorrientes de secuencia cero, los desbalances del sistema afectan significativamente la sensibilidad de los ajustes de un elemento de
sobrecorriente de secuencia negativa.
• Ventajas: proveen muy buen cubrimiento a fallas resistivas; proveen un mayor
cubrimiento para fallas resistivas en el extremo opuesto de la línea, que los elementos de corriente de secuencia cero; son insensibles al acoplamiento mutuo de secuencia cero en líneas paralelas; no los afecta el tamaño de la carga pues tiene poco impacto en la magnitud de corriente de secuencia negativa; mejores que los elementos de secuencia cero cuando la fuente son de aportación de corriente fuerte, pues la tensión de secuencia negativa es mayor que el de secuencia cero.
• Desventajas: los afectan los cambios en el tamaño de la fuente; los afectan los
2.5 PROTECCION DE LINEAS CON RELEVADORES DE DISTANCIA 21.
Los relevadores de distancia utilizan la relación entre la tensión y la corriente para
determinar si la falla está en la zona de protección del relevador. Las características de estos relevadores se describe en el diagrama R-X y se ajustan de acuerdo con las impedancias de secuencia cero y positiva de la línea. Para la solución de problemas de fallas a tierra, se usan la cuadrilateral y la Mho. Su zona de operación es función sólo de la impedancia medida y su ajuste es fijo, independiente de las magnitudes de las corrientes de falla. En operación normal la impedancia de la línea es alta y resistiva. Durante las fallas baja y reactiva. Este cambio repentino determina la ocurrencia de una falla y si ésta se encuentra dentro de su zona de protección [10].
operación del relevador por medio de programas en base a algoritmos que caracterizan las curvas, zonas y lógica de operación del relevador cuando ocurre una falla. [11].
En los circuitos de transmisión de alta tensión, los niveles de corriente de fallas llegan a ser muy altos, por lo que si una falla no es despejada rápidamente, causa inestabilidad en el sistema de potencia así como daños al personal o al equipo. Por esta razón lo relevadores de distancia son empleados en lugar de relevadores de sobrecorriente.
Algunas de las ventajas de los relevadores de distancia sobre los relevadores de sobrecorriente son:
• Mayor zona de operación instantánea.
• Mayor sensibilidad.
• Más fácil de coordinar y de ajustar.
• No presentan gran afectación por los cambios en la configuración del sistema de
potencia.
Un relevador de distancia calcula la impedancia de la línea como el cociente de la tensión entre la corriente vista desde su la ubicación del relevador, para determinar la ubicación de la falla y discriminar si se encuentra dentro o fuera de su zona de operación.
El relevador de distancia se encuentra conectado a la línea a través de los transformadores de instrumento como se muestra en la figura 2.1.
Es decir
Figura 2.1 Conexión del relevador de distancia a línea de transmisión.
S
RELEVADOR DE DISTANCIA
ZS ZL
IR
En la figura 2.2 se muestra la representación del alcance de la protección del relevador de distancia en la línea de la subestación G a la subestación H, el sistema también puede ser representado por un gráfico X-R o plano de impedancias.
Figura 2.2 Representación de línea protegida por un relevador de distancia y su plano de impedancia.
2.5.1 TIPOS DE CARACTERISTICAS DE RELEVADOR DE DISTANCIA.
Los relevadores de distancia se clasifican según la forma de sus zonas de operación, las más conocidas y aplicadas son las siguientes que se muestran en la figura 2.3.
a) Característica de impedancia.
b) Característica mho.
c) Característica de reactancia.
d) Característica poligonal o cuadrilateral.
Figura 2.3 Tipos de características de relevadores de distancia.
Fuente
Zs FuenteZs
G H
ZL
n Alcance
Tensiones de barra
Zs G
ZL H Zu X
R
2.5.2 CARACTERISTICA DE TIPO IMPEDANCIA.
El término de impedancia se aplica solo a resistencia, solo a reactancia o a una combinación de las dos, en protecciones el relevador de impedancia tiene una característica diferente del relevador que responde a cualquier tipo de impedancia.
El elemento de corriente produce un par positivo (puesta en servicio del relevador) mientras que el elemento de tensión produce un par negativo (reposición). La ecuación del par es:
T = K1 I2 – K2V2 – K3
En donde V e I son magnitudes eficaces de la tensión y corriente y K3 el efecto del resorte del control.
Cuando el par neto es cero se tiene:
0 = K1 I2 – K2V2 – K3
Despejando y dividiendo ente K2 I2
K2 V2=K1 I2 – K3
! "#
$%&#
$!&#
'(
$!&# ) Z +,-K1I!/ K2I!2 -K3/K2I!24
Despreciando el efecto del resorte de control ya que su efecto solo es notorio a magnitudes de corriente relativamente bajas.
V I
K1
K2 6 7
Figura 2.4 Característica de funcionamiento de un relevador tipo impedancia.
Figura 2.5 Característica de funcionamiento de un relevador de impedancia en un diagrama X-R
En este diagrama el valor numérico de la relación de V (tensión) a I (corriente) se muestra como una longitud de un radio vector Z y ángulo de fase Ø entre V e I determina la posición. Si la I está en fase con la V el vector se sitúa en el eje + R; si I esta 180° fuera de fase con el vector V se sitúa en el eje –R; si I se atrasara de V el vector tiene una componente +X y si la I se adelanta de V, el vector tiene una componente –X.
Región de torque negativo Región de torque
positivo
Caracteristica de operación
I
V
Región de torque negativo
Región de torque positivo
Caracteristica de operación
Z +X
+R
Cualquier valor de Z menor que el radio del círculo resultara en un par positivo cualquier valor de Z mayor que este radio tendrá par negativo haciendo caso omiso del ángulo de fase entre V e I.
El principio de los relevadores de distancia lo rige la relación o el cociente entre la tensión y la corriente en el punto de la ubicación del relevador, es decir Z=V/I la impedancia de la línea hasta el punto de la falla en una línea de transmisión de la impedancia es proporcional a la distancia por lo tanto el relevador recibe el nombre de relevador de distancia [11].
2.5.3 CARACTERISTICA DE TIPO MHO.
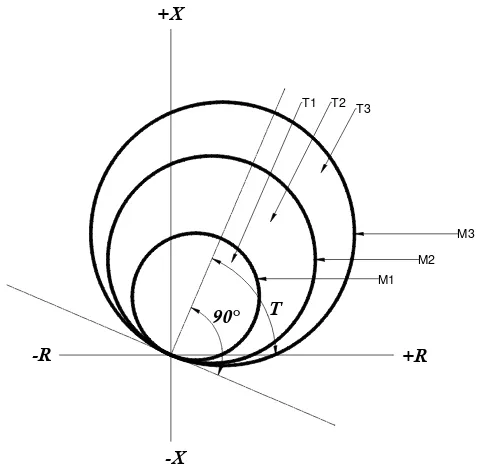
[image:49.595.177.417.401.636.2]Este relevador es completo para la protección de líneas de transmisión y está compuesto de tres unidades mho de alta velocidad M1, M2, M3 y una unidad de tiempo similar a la de un relevador de distancia del tipo impedancia, excepto que no requiere unidad direccional por separado ya que las unidades Mho son inherentemente direccionales, la característica de funcionamiento del relevador completo se muestra en la figura 2.6.
Figura 2.6 Característica de funcionamiento de un relevador de distancia tipo mho.
• Ventajas: Fácil de ajustar; la diferencia de ángulos de fuente y línea los afecta
menos que a la característica cuadrilateral. Para condiciones de fuente débil, un
6 7°
T1 T2 T3
T 90°
M1 M2
M3
+X
+R
-X -R
elemento Mho puede ofrecer mayor cubrimiento a fallas resistivas cercanas que el elemento cuadrilateral.
• Desventajas: provee cubrimiento resistivo limitado para fallas al extremo del
alcance del elemento; provee cubrimiento resistivo limitado en condiciones de fuente fuerte; es influenciado por el acoplamiento mutuo de secuencia cero [10].
2.5.4 CARACTERISTICA DE TIPO REACTANCIA.
La unidad de reactancia de un relevador de distancia del tipo reactancia tiene, un elemento de sobrecorriente que desarrolla un par positivo y un elemento direccional de corriente– tensión que se opone o ayuda al elemento de sobrecorriente según sea el ángulo de fase entre la corriente y la tensión.
T=K1 I2 - K2 V I SenØ - K3 (Ø= positivo cuando I se atrasa de V)
Cuando el par neto es cero se tiene:
K1 I2 = K2 V I Sen Ø + K3
Dividiendo entre I2
K1=K2(V/I2) Sen Ø + (K3/I2) ; se tiene: V/I Sen Ø = Z Sen Ø = X
X = K1/K2 – K3/K3 I2; despreciado el efecto del resorte de control:
Nos queda: X=K1/K2 = constante