INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
PRESENTE.
Por medio de, la presente hago constar que soy autor y titular de la obra denominada
/>1
, en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución, distribución pública y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la edición y en general cualquier parte de LA OBRA son de mi entera responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad relacionada con la OBRA que cometa el suscrito frente a terceros.
Modelo Sólido Hu-Washizu para Sólidos de Concreto Reforzado
-Edición Única
Title
Modelo Sólido Hu-Washizu para Sólidos de Concreto
Reforzado -Edición Única
Authors
Melvin Antonio Santos Velasquez
Affiliation
Tecnológico de Monterrey, Campus Monterrey
Issue Date
2011-05-01
Item type
Tesis
Rights
Open Access
Downloaded
18-Jan-2017 12:58:11
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
CAMPUS MONTERREY
DIVISIÓN DE INGENIERÍA Y ARQUITECTURA
PROGRAMA DE GRADUADOS EN INGENIERÍA
M O D E L O S O L I D O T I P O H U W A S H I Z U P A R A S O L I D O S D E C O N C R E T O R E F O R Z A D O
TESIS
PRESENTADA COMO REQUISITO PARCIAL PARA
OBTENER EL GRADO ACADÉMICO DE:
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN
INGENIERÍA Y ADMINISTRACIÓN DE LA
CONSTRUCCIÓN EN EL ÁREA DE INGENIERÍA
ESTRUCTURAL
POR:
MELVIN ANTONIO SANTOS VELASQUEZ.
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY
DIVISIÓN DE INGENIERÍA Y ARQUITECTURA PROGRAMA DE GRADUADOS DE INGENIERÍA
MODELO SOLIDO TIPO HUWASHIZU PARA
SOLIDOS DE CONCRETO REFORZADO
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO ACADÉMICO DE:
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN INGENIERÍA Y ADMINISTRACIÓN DE LA CONSTRUCCIÓN EN EL ÁREA DE INGENIERÍA
ESTRUCTURAL
POR:
TESIS
MELVIN ANTONIO SANTOS VELASQUEZ
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY
DIVISIÓN DE INGENIERÍA Y ARQUITECTURA PROGRAMA DE GRADUADOS DE INGENIERÍA
Los miembros del comité de tesis recomendamos que el presente proyecto de tesis
presentado por MELVIN ANTONIO SANTOS VELASQUEZ sea aceptado como requisito parcial
para obtener el grado académico de:
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN INGENIERÍA Y ADMINISTRACIÓN DE LA
CONSTRUCCIÓN EN EL ÁREA DE INGENIERÍA ESTRUCTURAL
Comité de tesis:
Asesor
Raymundo Cordero Cuevas, Ph.D.
Sinodal
Carlos Reyes Salinas, Ph.D.
Sinodal
Aprobado:
Sergio Gallegos Cazares, Ph.D.
Director de la Maestría en Ingeniería y Administración de la Construcción
DEDICATORIA
A Dios. A mi Madre.
A mi Padre. A mis Hermanos. A toda mi familia.
A al Dr. Sergio Gallegos por creer en mí, por su apoyo.
Y a todos aquellas personas a las cuales llamo amigos y amigas que siempre me apoyaron en todo momento para lograr mis metas y sueńos, en especial aquellos amigos que hice en
México, por que más que amigos encontré familia en ellos.
ÍNDICE
CAPÍTULO 1. INTRODUCCIÓN. 5
1.1. General 5
1.2. Antecedentes 7
1.3. Objetivos 10
1.4. Alcances. 11
CAPÍTULO 2. MODELO DEL MATERIAL 12
2.1. General 12 2.2. Modelo del concreto 14 2.2.1. Comportamiento del concreto 14 2.2.2. Modelo de Dańo 15 2.2.2.1. Esfuerzo efectivo e hipótesis de la equivalencia de la deformación 16 2.2.2.2. Base termodinámica 18 2.2.2.3. Deformación equivalente 20 2.2.2.4. Criterio de dańo 21 2.2.2.4.1. Forma directa 21 2.2.2.4.2. Forma funcional 22 2.2.3. Evolución de las variables internas de dańo 23 2.2.4. Ecuación de consistencia 24 2.2.5. Integración de la ecuación constitutiva 26 2.2.6. Operador constitutivo tangente 28 2.2.7. Caracterización del modelo 30 2.2.8. Umbral de dańo 31 2.2.9. Función de acumulación de dańo 31
2.2.10. Definición del esfuerzo equivalente (T) 33
2.3. MODELO DEL ACERO DE REFUERZO 34 2.3.1. Comportamiento del acero de refuerzo 34 2.3.2. Barras elastoplásticas. Algoritmo de solución 35
CAPÍTULO 3. MODELO DE ELEMENTOS FINITOS. 39
3.1. Elementos con deformación mejorada (Enhanced Assumed Strain) 39
3.2. Formulación 40 3.2.1. Planteamiento del problema variacional 40
3.4. Aproximación del campo de deformaciones mejorado (Enhanced Assumed Strain) 43
3.5. Metodología de resolución de las ecuaciones de elementos finitos 44
CAPÍTULO 4. MODELO NOLINEAL DE SOLUCIÓN: NEWTONRAHPSON. 47
4.1. Modelos conceptuales. 47
4.2. Análisis estático no lineal 49 4.2.1. Material no lineal 49 4.2.2. Forma Fuerte del Problema de Valores de Frontera 49
4.2.3. Principio Variacional Gobernante 50
4.2.4. Discretización 50 4.2.5. Solución De Las Ecuaciones De Equilibrio 52
CAPÍTULO 5. IMPLEMENTACION EN XPLORE 59
5.1.1. General 59
5.1.2. Integración con al GidXplore. 63
CAPÍTULO 6. MODULO Y VALIDACIONES. 68
6.1. General 68
6.2. Validaciones. 68 6.2.1. Validación de elementos barra 68
6.2.1.1. Barras con comportamiento elastoplástico (Owen & Hinton, 1980) 68 6.2.1Í2. Barras Acero. Comparativo entre modelo FEM y prueba de tensión en laboratorio. 71
6.2.1.3. Elemento Barra Compuesto. 73 6.2.2. Validación de la viga con modelo de material con dańo 75
6.2.2.1. Viga reforzada L6 (Feldeman & Siess, 1955) 75
6.2.2.1.1. Condiciones de Modelado. 76
6.2.2.1.2. Resultados 78
CAPÍTULO 7. CONCLUSIONES. 83
CAPÍTULO 8. RECOMENDACIONES 85
T A B L A DE FIGURAS Figura 21: Respuesta típica CargaDesplazamiento de vigas de CR 12 Figura 22. a) Material dańado sujeto al esfuerzo a, (b) Material sin dańo sujeto al esfuerzo efectivo a 17 Figura 23. Relación unidimensional mostrando la degradación de la resistencia por el dańo que se acumula 20 Figura 24. Deformación equivalente en el espacio de deformaciones principales 21 Figura 25. Criterios de Dańo 21 Figura 26. Función monotónica creciente G 22 Figura 27. Condiciones de carga, carga neutral o descarga para un punto que se encuentra en la superficie de falla 25 Figura 28. Modelo exponencial de dańo 32 Figura 29. Modelo con dańo diferente en tensión y compresión 33 Figura 210. Relación EsfuerzoDeformación del Acero 34 Figura 41. Modelo General de un Cuerpo mecánico sólido 48 Figura 51. Proceso de solución de GidXplore 60 Figura 52. Menú "Problem Type" 60 Figura 53. Archivo de configuración de GID 61 Figura 54. Archivo de materiales GidXplore 63
Figura 55. Ejemplo de archivo de material 64
Figura 617. Estado de dańo ultimo 81 Figura 618. Carga vrs Deflexión del Claro Medio 81
Figura 619. Comparativo de la respuesta asignando el dańo máximo permitido en el concreto 82
TABLAS
Tabla 21. Modelo constitutivo de elastodańo 19 Tabla 22. Problema de valores iniciales que define el modelo constitutivo de elastodańo 26
Tabla 23. Algoritmo para evaluación del esfuerzo y del módulo tangente 30 Tabla 24. Algoritmo Elementos Barra y Retorno Rigidez Tangente 38 Tabla 41. Forma fuerte del problema de valores de frontera estática para deformaciones
infinitesimales 49 Tabla 42. Forma débil del problema para deformaciones infinitesimales al tiempo tn+1 50
Tabla 43. Método de NewtonRaphson para solución de sistemas de ecuaciones no lineales
CAPITULO 1. INTRODUCCIÓN.
1.1. General
El Concreto Reforzado (CR) se ha convertido en uno de los materiales de
construcción más importante y es ampliamente utilizado en muchos tipos de estructuras
de ingeniería. La economía, la eficiencia, la fuerza y la rigidez del concreto reforzado, lo
convierten en un material atractivo para una amplia gama de aplicaciones estructurales.
Para su uso como material estructural, el concreto deberá cumplir las siguientes
condiciones: '
(1) La estructura debe ser resistente. La correcta aplicación de los principios
fundamentales de análisis, deben dar lugar a un margen de seguridad
suficiente contra el colapso.
(2) La estructura debe comportarse adecuadamente. Se debe tener cuidado de
controlar el desplazamiento en las cargas de servicio y de limitar el ancho de
fisura a un nivel aceptable.
(3) La estructura debe ser económica. Los materiales deben ser utilizados de manera eficiente, ya que la diferencia en el costo unitario entre el concreto y
el acero es relativamente grande. El objetivo último del diseńo es la creación
de una estructura segura y económica.
Las herramientas avanzadas de análisis puede ser una ayuda indispensable en la
evaluación de la seguridad y la comodidad de un diseńo propuesto. Esto es, sobre todo,
una realidad para muchas estructuras modernas complejas, como las centrales
nucleares, puentes, plataformas offshore de petróleo y gas y los túneles bajo tierra o
bajo el agua, que están sometidas a historias de carga complejas.
La evaluación de la seguridad y facilidad de mantenimiento de estas estructuras hace
Con el advenimiento de las computadoras digitales y potentes métodos de análisis,
tales como el método de elementos finitos se evitarán y/o reducirán en gran medida la
necesidad de realizar experimentos en laboratorio. El método de elementos finitos se ha
convertido en una poderosa herramienta computacional, que permite realizar análisis
complejos de la respuesta no lineal de estructuras de CR que se llevarán a cabo de forma
rutinaria. Con este método la importancia y la interacción de los diferentes efectos no
lineales en la respuesta de las estructuras de CR pueden ser estudiadas analíticamente.
El presente estudio forma parte de este esfuerzo continuo y se refiere al análisis de
elementos sólidos de concreto reforzado, cuyo punto focal es el estudio de dańo
producido por el agrietamiento de estos elementos.
1.2. Antecedentes
La primera publicación sobre la aplicación del método de elementos finitos para el
análisis de las estructuras de CR fue presentado por (Ngo & Scordelis, 1967). En su
estudio, se analizaron simples vigas en 2D con un modelo en el que estuvieron
representados concreto y acero de refuerzo mediante elementos triangulares en tensión
constante, y un elemento de unión o vínculo especial que se utilizaba para conectar el
acero con el concreto para describir el efecto de adherencia. Un análisis elástico lineal se
realizó en las vigas con patrones predefinidos de fisura para determinar los esfuerzos
principales en el concreto, destaca el refuerzo de acero y hace hincapié en los puntos de
adherencia o "bonds". Desde la publicación de este trabajo pionero, el análisis de
estructuras de concreto reforzado ha disfrutado de un creciente interés y muchas
publicaciones han aparecido.
Un avance importante fue hecho por (Rashid, 1968) quien introdujo el concepto de
una "grieta distribuida", en el estudio de la respuesta de simetría axial de estructuras
pretensadas de concreto. Rashid tuvo en cuenta el agrietamiento y los efectos de la
historia de carga en sus análisis. Hoy en día este enfoque para modelar el
investigadores en el análisis no lineal de estructuras de CR, ya que su implementación
en un programa de análisis de elementos finitos, es más sencilla que la del modelo de
falla discreta. Al mismo tiempo, el esfuerzo conjunto de muchos investigadores en los
últimos 20 ańos ha eliminado muchas de las limitaciones del modelo planteado por
(Rashid, 1968) (Structures ASCE, 1982), (Meyer & Okamura, 1985). Hoy día la tendencia
para modelar el comportamiento concreto es usar modelos de dańo como modelos de
dańo direccionado, modelo elastoplástico con dańo continuo, isotrópico escalar.
Muy poco trabajo se ha hecho, hasta ahora, sobre el comportamiento en tres
dimensiones de los sistemas de concreto reforzado mediante la modelación por método
de elementos finitos con elementos sólidos, y esto debido al esfuerzo computacional
involucrado y la falta de conocimiento del comportamiento del material de concreto en
tres dimensiones. (Suidan & Schnobrich, 1973), fueron los primeros en estudiar el
comportamiento de las vigas con 20 nodos tridimensionales de elementos finitos
isoperamétricos. El comportamiento del concreto en compresión se asumió
elastoplástico basado en el criterio de plastificación de Von Mises. Una malla gruesa de
elementos finitos fue utilizada en estos análisis por razones de coste.
Un fundamento importante en el empleo de modelos elastoplástico con dańo
continuo fue propuesto por (Simo & Ju, 1987), que emplearon fundamentos de
termodinámica para definir su teoría. Plantean su teoría desde dos puntos de vista, el
primero planteando las variables internas de estado dependientes de una formulación
por deformaciones del material, desarrollando la hipótesis de las deformaciones
equivalentes. Y la segunda, una formulación basada en los esfuerzos, utilizando como
complementario la norma del tensor de esfuerzos.
Basado en un análisis numérico de presas de concreto sometidas a excitaciones
sísmicas (Cervera, Oliver, & Manzoli, 1996) presentan en forma independiente la
incorporación de dos variables de dańo internas que caracterizan la tracción y
Un modelo constitutivo para la simulación del comportamiento sísmico de columnas
de sección hueca, validado por los resultados experimentales obtenidos en el modelo
reducido, se presenta por (Faria, Pouca, & Delgado, 2000). Con este fin, el concreto se
discretiza en elementos finitos en estado de tensión plana, cuyo comportamiento fue
simulado mediante un modelo de dańo continuo con dos variables escalares de dańo,
una para representar el dańo por tensión y la otra por compresión. El refuerzo se
discretiza en elementos lineales en las que el comportamiento cíclico del acero es
simulados por el modelo (Giannini, Giuffre, & Menegotto, 1985).
Así mismo (Armero & Oller, 2000) plantean un marco coherente de diferentes
formulaciones constitutivas de dańo en espacios planos de deformaciones, cuya
característica principal de estas formulaciones propuestas es el resultado directo e
independiente de la consideración de los mecanismos de dańo (dańo isótropo, grietas,
etc.) así como la degradación de la rigidez del material, lo que permite una completa
caracterización física de estos efectos.
La derivación de un modelo de dańo isotrópico sencillo para simular la falla del
concreto bajo diferentes condiciones de esfuerzos y deformaciones, con especial
atención en la fractura y deformación bajo condiciones de tensión fue presentada por
(Oliver, M., Oller, & Lubliner, 1990). Es un modelo simple basado en la definición de un
parámetro escalar que afecta y reduce la rigidez del elemento a medida que se
aumentan los esfuerzos es muy sencillo pero captura el efecto del agrietamiento de una
manera muy efectiva.
La determinación de un dańo global en la simulación de elementos sólidos fue
planteado por (Ońate, Hanganu, & Barbat, 2001) a través de un procedimiento numérico
para la predicción de dańos locales y globales en estructuras de ingeniería civil con el
método de elementos finitos y un modelo con dańo continuo. El método es adecuado
para el cálculo del límite de carga de concreto reforzado (CR) y en las estructuras para la
El desarrollo de modelos más exactos se han planteado como por ejemplo, un
procedimiento numérico para predecir el dańo global en la estructura aporticada
utilizando un análisis matricial es definido por (Faleiro, Oller, & Barbat, 2008). Este
modelo planteado tiene la característica que es adecuado el cálculo de la carga límite de
estructuras de concreto reforzado sometidos a acciones sísmicas.
Es la intención de este estudio poder abordar un modelo de dańo isotrópico para el
concreto, un comportamiento elastoplástico para el acero de refuerzo y utilizar un
modelo isoparamétrico de elementos sólidos hexaedros para desarrollar un código que
nos permita modelar estructuras tridimensionales de concreto reforzado en donde se
podrá evaluar el dańo que se produce principalmente por el agrietamiento por la acción
de las cargas aplicadas sobre los elementos, tomando como base el modelo isotrópico
de (Oliver, M., Oller, & Lubliner, 1990).
1.3. Objetivos
Los principales objetivos de este estudio son:
(1) Desarrollar un modelo constitutivo sencillo, que por su simplicidad no
comprometa la precisión del mismo. Se seleccionó un modelo de material con
dańo que es capaz de predecir con bastante exactitud la descripción del
agrietamiento en vigas de concreto reforzado.
(2) Investigar el efecto de los materiales y los parámetros numéricos, tales como
la resistencia del concreto a la tracción, la deformación plástica que se ve
sujeta el acero de refuerzo y su respuesta en elementos de concreto armado.
(3) Investigar la posibilidad de emplear un elemento sólido de 8 nodos para
modelar concreto. Se empleará una formulación del tipo HuWashizu con
1.4. Alcances.
Después de la introducción y una breve reseńa de los estudios anteriores en el
Capítulo 1, Capítulo 2 se refiere a la descripción del comportamiento del concreto y
acero de refuerzo. El comportamiento del concreto y del acero de refuerzo se modelan
de forma independiente. El comportamiento del concreto es descrito por un modelo no
lineal isotrópico con dańo. El Capítulo 3 analiza y detalla la formulación del elementos
sólido para la solución por elementos finitos, se emplea la formulación de deformación
mejorada y se implementa en un elemento sólido hexaedro de 8 nodos.
En el Capítulo 4 se entra en la discusión de los aspectos computacionales de la
solución. Es decir el método de solución no lineal de los problemas planteados. Se
presentan esquemas de iteración y el procedimieVito de solución resultante no lineal se
describe junto con los criterios de convergencia asociada. En el Capítulo 5 se presentan
CAPITULO
2.
MODELO DEL MATERIAL
2.1. General
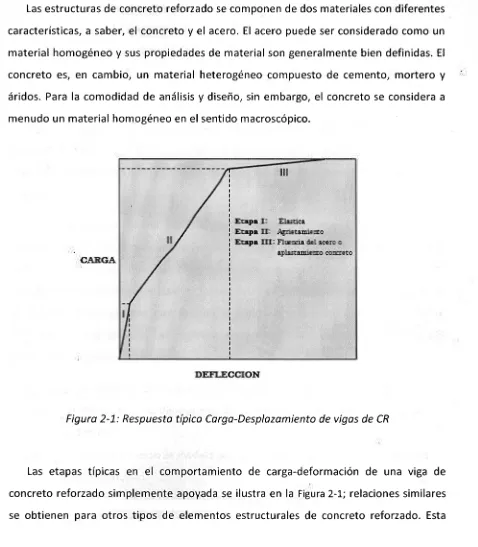
Las estructuras de concreto reforzado se componen de dos materiales con diferentes
características, a saber, el concreto y el acero. El acero puede ser considerado como un
material homogéneo y sus propiedades de material son generalmente bien definidas. El
concreto es, en cambio, un material heterogéneo compuesto de cemento, mortero y
áridos. Para la comodidad de análisis y diseńo, sin embargo, el concreto se considera a
[image:19.612.71.549.177.724.2]menudo un material homogéneo en el sentido macroscópico.
Figura 21: Respuesta típica CargaDesplazamiento de vigas de CR
Las etapas típicas en el comportamiento de cargadeformación de una viga de
obtenido la solución no lineal. El modelo de dańo puede tener en cuenta todos los
aspectos importantes que deben considerarse en un análisis no lineal de estructuras de
concreto, tal como la diferencia de comportamiento en tracción y compresión, el efecto
de la degradación de la rigidez debido a causas mecánicas y la objetividad de la
respuesta con respecto a diferentes mallas de elementos finitos.
Al observar el comportamiento real de muchos materiales, es evidente que al
aumentar la deformación, las propiedades mecánicas sufren un proceso de degradación
debido a la aparición de microgrietas y microhuecos. La mecánica del dańo continuo,
nos provee de procedimientos para representar este tipo de comportamiento de estos
materiales, (Simo & Ju, 1987) muestra un planteamiento general, basado en el marco
termodinámico para el desarrollo de relaciones constitutivas. Este planteamiento
emplea una formulación en el espacio de deformaciones, razón por la cual se le
denomina formulación guiada por la deformación. Otros autores plantean modelos de
dańo direccionados (Luccioni & Oller, 2003), el cual plantea que el agrietamiento en
materiales como el concreto está orientado siguiendo la historia de esfuerzos
produciendo un deterioro progresivo en la rigidez elástica del material.
El planteamiento que se presenta en este capítulo se basa en el artículo de (Oliver,
M., Oller, & Lubliner, 1990), que muestra un planteamiento general, basado en un
simple modelo isotrópico de dańo para simular la falla del concreto bajo diferentes
condiciones de esfuerzo o deformación.
2.2.2.1. Esfuerzo efectivo e hipótesis de la equivalencia de la deformación
Los modelos de dańo más simples son los modelos de dańo escalar, donde la
degradación de rigidez se describe a través de una sola variable escalar que gobierna el
problema y que afecta por igual a todas las componentes del tensor de rigidez elástico.
Como resultado del inicio, crecimiento y coalescencia de microgrietas y microhuecos,
probeta de un material sujeto a tensión, con un área nominal A, con una cierta cantidad
de estos defectos físicos que producen que el área dańada sea Ad, dando por resultado
un área efectiva de material. El esfuerzo de Cauchy a , se aplica sobre el área nominal,
mientras que el esfuerzo medido sobre el área efectiva es a como se muestra en la
Figura 22
Figura 22. a) Material dańado sujeto al esfuerzo a, (b) Material sin dańo sujeto al esfuerzo efectivo a
La relación entre los dos modelos se establece manteniendo la cantidad de fuerza
generada.
(21)
Esta relación se puede reescribir de la siguiente forma
(22)
La mayoría de los modelos de dańo escalar que existentes en la bibliografía se basan
en la hipótesis de que el dańo está vinculado a la historia de deformación porque es más
fácil de implementar. Entonces el concepto de tensión equivalente definido en la
ecuación (21) se derivan de la forma de la energía libre.
En donde se ha definido una variable escalar de dańo d como el cociente del área
dańada entre el área nominal. Claramente puede observarse que si no hay área dańada
(23)
En forma adicional a esta definición física del dańo, se establece una hipótesis de
equivalencia de la deformación (Simo & Ju, 1987), originalmente atribuida a (Chaboche
& Lemaitre, 1978). Se establece que la deformación asociada con un estado de dańo
bajo el esfuerzo aplicado, es equivalente a la deformación asociada con su estado no
dańado sujeto al esfuerzo efectivo. Esta deformación equivalente se ˇlustra en la Figura
22.
2.2.2.2. Base termodinámica
Se propone la siguiente forma del potencial de energía libre:
(24)
es la energía libre para el caso elástico sin dańo. Si C0 define el tensor de
constantes elásticas, se tiene: Donde
Considerando la desigualdad de ClausiusDuhem con esta relación de energía libre,
se tiene en primer lugar la relación de estado:
(25)
(26)
De donde se obtiene la definición del esfuerzo efectivo, verificando la ecuación (22)
que se obtuvo en la sección anterior de manera fenomenológica y haciendo uso de la
hipótesis de equivalencia de la deformación.
(27)
Insertando la definición de la energía libre, ecuación (24), se tiene
(29)
Tomando en cuenta que P o ^0, ecuación (25), es una función positiva definida, se
implica que:
De (29) se observa que la energía libre elástica es la fuerza termodinámica asociada
a la variable de dańo.
Lo cual indica que el dańo es irreversible, lo que es consistente con la definición física
del dańo como el cociente de la superficie dańada con respecto a la superficie nominal.
Combinando las ecuaciones (26) y (27), se obtiene la relación constitutiva de elasto
dańo, en donde se observa que el efecto del dańo es degradar o reducir las constantes
elásticas. La Tabla 21 muestra un resumen de las relaciones constitutivas del modelo de
elastodańo.
Tabla 21. Modelo constitutivo de elastodańo
En la Figura 23 se muestra una relación esfuerzodeformación unidimensional que
ilustra el efecto del dańo que se acumula en la degradación de la respuesta del material,
cierto límite, el dańo se empieza a producir y degrada la rigidez. Si se descarga, no hay
dańo adicional, pero la rigidez no se puede recuperar ya que d > 0.
> e
Figura 23. Relación unidimensional mostrando la degradación de la resistencia por el dańo que se acumula
2.2.2.3. Deformación equivalente
Es necesario emplear una variable adicional que nos permita mapear el estado
multidimensional de deformación a un valor escalar, permitiendo comparar diversos
estados. Para ello se crea la variable f, denominada la deformación equivalente. La
determinación de esta variable es arbitraria; una forma especialmente atractiva es la
propuesta por (Simo & Ju, 1987) basándose en la ecuación (28), que define la fuerza
termodinámica conjugada a la variable de dańo como
(211)
De manera que la energía libre elástica sin dańo es la fuerza termodinámica asociada
a d. Se propone entonces la siguiente definición (Simo & Ju, 1987), que toma el
significado de la norma de energía no dańada:
(212)
Para un valor constante dex la ecuación (212) toma la forma de un elipsoide
centrado en el origen en el espacio de deformaciones principales como se muestra en la
Figura 24. Deformación equivalente en el espacio de deformaciones principales.
2.2.2.4. Criterio de dańo
Es necesario definir cuando ocurre o cuando rjo ocurre dańo durante un proceso de
deformación, para ello se define un criterio de dańo. Se presentan dos formas alternas
para este criterio.
2.2.2.4.1. Forma directa
Se propone la siguiente forma para el criterio:
(213)
El subíndice t se refiere al tiempo t e R+, y rt es un parámetro, denominado el
umbral de dańo, que define el tamańo del dominio elástico al tiempo t y que es una
variable interna. Esquemáticamente se muestra en la Figura 25 el criterio de dańo con
las posibles combinaciones de la función F.
Con base en este criterio se puede definir el dominio elástico E como
(214)
Además, se define la superficie de dańo mediante
(215)
Debe notarse que al tiempo t = 0, el umbral de dańo tiene un valor inicial r0, que se
considera una propiedad característica del material. El umbral de dańo puede crecer, de
forma que:
(215a)
Esta condición establece que el dańo en el material se inicia cuando la norma de
energía del tensor de deformación ft, excede el umbral inicial de dańo r0.
2.2.2.4.2. Forma funcional
En forma alternativa (Simo & Ju, 1987), proponen definir una función G(t), que como
se mostrará en la siguiente sección, tiene que ser monotónica creciente, como se
muestra en la Figura 26, para definir el criterio de dańo con base a esta función.
(216)
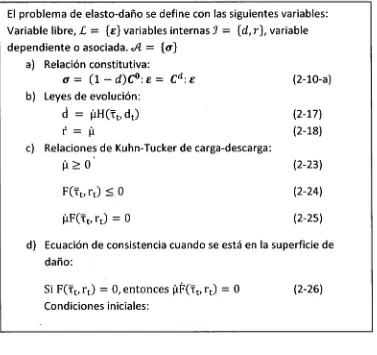
2.2.3. Evolución de las variables internas de dańo
En este modelo se manejan dos variables internas, dt y rt, por lo que ahora es
necesario definir la forma en que evolucionarán al producirse la deformación. Se
proponen las siguientes relaciones:
(217)
(218)
En estas ecuaciones, fi representa un parámetro de consistencia que hay que
determinar y H ( ít, dt) representa una función de dańo que tiene que definirse para
controlar la evolución del mismo. En el casó particular en que H se considera
independiente de dt, puede definirse en términos de la función G presentada en la
sección anterior, de manera que solo es necesario definir una función para controlar la
evolución del dańo.
(219)
Debido a la ecuación (215a) cuando se produce dańo, el umbral de dańo sólo
puede crecer, por lo que se concluye de la ecuación (218) que
(220)
Considerando la restricción impuesta por la disipación en la ecuación (210) sobre la
variable de dańo (d > 0) y considerando la ecuación (220), se puede concluir de la
expresión (217) que
H > 0 (221)
En el caso en que H se dé mediante la ecuación (219), esta restricción obliga a que 6
sea una función monotónica creciente para satisfacer las condiciones de disipación,
(222)
Para distinguir entre las condiciones de carga y descarga en el material, que van
asociadas con el incremento en el dańo o no dańo del material se establece la hipótesis
de que la descarga se realiza en forma elástica, sin incremento de dańo. Es posible
entonces establecer las siguientes relaciones, llamadas de KuhnTucker, para hacer la
distinción entre estas condiciones:
(223)
(224)
(225)
Si el material se encuentra en el régimen elástico, entonces F < 0, debido a (225)
(1 = 0, lo que implica, debido a que (217) d = 0, por lo que no se produce dańo
adicional.
Si se cumple el criterio de dańo, F = 0, lo que satisface (225) y por tanto de (223) se
tiene que |i > 0. Para determinar el valor del parámetro de consistencia se requiere una
relación adicional, llamada ecuación de consistencia, que se presenta a continuación.
2.2.4. Ecuación de consistencia
La deformación equivalente no puede encontrarse fuera de la superficie de dańo, al
llegar a ella desde el interior del dominio y tratar de salir del dominio elástico, la
superficie puede evolucionar para mantenerlo adentro o sobre la superficie. En la Figura
27 se muestra la superficie de dańo y las tres opciones que se tienen cuando la
deformación equivalente se halla sobre algún punto de esta superficie, puede haber
carga, carga neutral o descarga.
Relación
Figura 27. Condiciones de carga, carga neutral o descarga para un punto que se encuentra en la superficie de falla
Para determinar qué es lo que ocurre se emplea la siguiente ecuación de
consistencia:
a. Si F < 0, entonces por (226) se tiene que |i = 0, lo que indica descarga
elástica sin desarrollo del dańo.
b. Si F = 0 entonces tenemos dos opciones, |i > 0 indicando carga y evolución
del dańo, o bien ü. = 0 indicando carga neutral, sin evolución del dańo.
c. Si F > 0, eventualmente F > 0, lo que no es posible.
El valor del parámetro de consistencia se obtiene, por tanto, forzando la condición
de carga como se mostrará en la siguiente sección.
A manera de resumen, en la Tabla 22 se presenta el problema de valores iniciales
que define el modelo constitutivo de elastodańo, a partir del cual se debe calcular el
esfuerzo para cualquier tiempo t.
(226)
[image:32.612.209.418.49.167.2]Tabla 22. Problema de valores iniciales que define el modelo constitutivo de elasto dańo.
2.2.5. Integración de la ecuación constitutiva
El modelo presentado en la Tabla 22 define un problema de valores iniciales que se
debe integrar para encontrar la evolución de las variables internas al progresar la
deformación. Las ecuaciones (217) y (227) forman un conjunto de ecuaciones
diferenciales ordinarias de primer grado sujetas a las condiciones iniciales de t = 0, d = 0,
yr = r0.
Este tipo de problemas se puede integrar en forma cerrada o en forma numérica, y
como se verá más adelante, para este modelo produce los mismos resultados.
Se consideran tres casos: Régimen elástico, régimen de dańo con descarga y régimen
[image:33.612.105.482.105.460.2]Caso 1. Régimen elástico:
(228)
(229)
(230)
(231)
(232)
(233)
(234)
(235)
(236) De (225)
Caso 2. Régimen de dańo con descarga:
Por la descarga F < 0, por lo que de la ecuación de consistencia
Caso 3. Régimen de dańo con carga:
Como hay carga [i > 0, y de la ecuación de consistencia se tiene entonces
En esta ecuación, tomando en cuenta la ecuación (232) se tiene que
Con este resultado se combinan las leyes de evolución para obtener
Finalmente, dado que por (232) r = ir, el valor de rt puede obtenerse de la siguiente
relación:
(237)
Dado que se tienen que satisfacer las condiciones iniciales, y dada la relación (236),
se establecen las siguientes condiciones sobre G:
Para t = 0,d = 0 = > d = G(r„) = 0 (238)
Así mismo, dado que en el extremo d =1, se tiene
G(oc) = 1 (239)
2.2.6. Operador constitutivo tangente
En la mayoría de IQS procesos no lineales, como este de dańo, las relaciones constitutivas se manejan en forma incremental, por lo que la relación esfuerzo
deformación se debe modificar en forma acorde para no reducir la rapidez de
convergencia. En particular se busca la forma correcta del módulo tangente CT de la
relación:
(240)
Sabiendo que:
(211)
(241)
La forma final de la ecuación (241) depende del valor de d, por lo que se tiene tres
casos posibles: elástico, descarga y carga.
(242)
(243)
b) Caso de carga
De acuerdo con la ecuación (236) se tiene:
(245)
Insertando (244) y (245) en la relación incremental (241) se tiene que:
a
(246)
(247) (236)
Haciendo uso de las ecuaciones (232) y (234), la derivada material de la
ecuación (212).
(244)
La derivada material de la deformación efectiva se obtiene de la ecuación
(212):
Debe observarse que el módulo tangente siempre es simétrico, siendo esto
consecuencia de la definición d e f , como la norma de energía elástica no dańada,
ecuación (212). La Tabla 23 muestra un resumen del procedimiento de implementación
del modelo constitutivo del material.
Tabla 23. Algoritmo para evaluación del esfuerzo y del módulo tangente.
2.2.7. Caracterización del modelo
La caracterización del modelo consiste en definir los parámetros del material que se
requieren para representar un material específico. Los parámetros elásticos son los
mismos que se han presentado antes: el módulo de Young E y el coeficiente de Poisson
[image:37.612.90.478.203.546.2]Los parámetros adicionales que se requieren para la parte de dańo son: el umbral
inicial de dańo ro y la función de dańo G(r).
2.2.8. Umbral de dańo
La definición del umbral de dańo puede realizarse mediante una prueba de tensión o
compresión simple del material. Dado que es más frecuente definir el inicio del dańo
mediante esfuerzos, se define la deformación equivalente como
2.2.9. Función de acumulación de dańo
Hay una gran variedad de funciones que pueden emplearse para simular la
acumulación del dańo en el material, sin embargo debe tenerse en cuenta la condición
que la función de disipación, impone sobre la función G:
G(r0) = 0 (251)
Además, para que en el límite d=l, se requiere que
Si el esfuerzo que define el umbral de dańo en una prueba de tensión se denomina
por ft, al substituir en (248), y considerando que|r0 = xt al instante en que se inicia el
dańo, se tiene que
(248)
(249)
El umbral también puede escribirse en términos de la deformación correspondiente
a la tensión uniaxial ft mediante substitución directa en (249)
G(oo) = 1 (252)
El modelo utilizado para este caso de estudio es el modelo exponencial que es
empleado en la referencia (Oliver, M., Oller, & Lubliner, 1990) para modelar el
comportamiento de concreto, cuya representación gráfica se muestra en la Figura 28
Este modelo requiere el parámetro de endurecimiento del material A para ajustarse
a un material en particular. Debe observarse que las condiciones (238) y (239) se
satisfacen con esta función. Donde los parámetros definidos en (253) se definen: Gˇ
energía de fractura; E0 módulo de elasticidad inicial del material; /* longitud
característica del elemento finito que para efectos de elementos hexaedros se tomara
como la distancia representativa contenida dentro del elemento;/żresistencia a la
tensión uniaxial del material.
Con frecuencia los parámetros de endurecimiento se intercambian por otros
parámetros del material, como la energía de fractura del material, para garantizar que
no se libera más energía de la disponible, evitando problemas de objetividad en el
material.
[image:39.612.128.538.170.419.2]2.2.10. Definición del esfuerzo equivalente (T)
La función f define el dominio elástico y existen varias alternativas para su
definición, algunas de las cuales se presentan en esta sección.
Para materiales que presentan degradación tanto en tensión como en compresión,
puede plantearse otro modelo que tenga estas características (Oliver, M., Oller, &
Lubliner, 1990)
En donde n es el coeficiente entre las resistencias a compresión fc y tensión ft de
pruebas unidimensionales: '
(255)
El factor 0 es un factor de balance que depende del estado de esfuerzo de acuerdo a
la siguiente expresión (Oliver, M., Oller, & Lubliner, 1990)
(256)
El resultado de emplear esta función se puede observar en la Figura 29
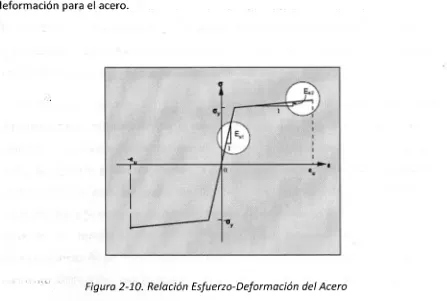
2.3. MODELO DELACERO DE REFUERZO
2.3.1. Comportamiento del acero de refuerzo
Las propiedades del acero de refuerzo, a diferencia del concreto, por lo general no
dependen de las condiciones ambientales. Por lo tanto, la especificación de una sola
relación de tensióndeformación es suficiente para definir las propiedades de los
materiales necesarios en el análisis de estructuras de concreto reforzado.
Para el refuerzo de acero que se utiliza en la construcción de concreto en forma de
barras de refuerzo o alambre, no es necesario introducirse en las complejidades de las
relaciones constitutivas de tres dimensiones para el acero. Para mayor eficiencia de
cómputo a menudo es suficiente idealizar la relación unidimensional tensión
[image:41.612.95.542.329.630.2]deformación para el acero.
Figura 210. Relación EsfuerzoDeformación del Acero
En este estudio, el acero de refuerzo es modelado como un material elástico lineal
con un comportamiento elastoplástico que está limitado por un parámetro de
endurecimiento por deformación una vez que se alcanza el esfuerzo de fluencia del
Las razones de esta aproximación son:
1. La conveniencia computacional del modelo,
2. El comportamiento de los miembros de CR se ve muy afectada por la fluencia del
acero de refuerzo cuando la estructura está sometida a momentos de flexión
monotónica.
La fluencia va acompańada de un aumento repentino en la deformación del
miembro. En este caso el uso del modelo elásticoplástico perfectamente conduce a
problemas de convergencia numérica cerca del esfuerzo último de los elementos.
Es, por tanto, aconsejable tomar ventaja del comportamiento de endurecimiento por
deformación del acero en la mejora de la estabilidad numérica de la solución. La
asunción de un comportamiento de endurecimiento por deformación lineal
inmediatamente después de la fluencia del acero de refuerzo no afecta negativamente a
la exactitud de los resultados, siempre y cuando la pendiente de la rama de
endurecimiento por deformación se determina de modo que la energía de deformación
del modelo es igual a la energía de deformación del acero.
Junto con el modelo del material se empleó un modelo elastoplástico para
elementos barra esto para simular el comportamiento del acero de refuerzo; estos dos
modelos en conjunto forman el modelo general del elemento sólido, el cual está
definido para tres grados de libertad; a diferencia de los elementos de refuerzo que
están definidos para un grado de libertad. Este tipo de elementos barra son
superpuestos a la malla de elementos de tres dimensiones, es decir que el acero de
refuerzo se considera como un miembro axial integrado en los elemento
isoparamétricos de tal manera que sus desplazamientos sean compatibles con los del
elemento sólido. Este modelo implica vínculo perfecto entre el concreto y el acero.
2.3.2. Barras elastoplásticas. Algoritmo de solución
A continuación se detalla el proceso de solución para los elementos barra de acero
1. Con los incrementos en los desplazamientos A i żn _ 1, calcular los incrementos
en las deformaciones Asn
, esto para el paso de iteración n1. 2. Calcular el incremento en el esfuerzo asumiendo un comportamiento lineal elástico. Esto podrá introducir cierto error si el elemento ha fluido y el material se está comportando elastoplásticamente. De cualquier manera, esto se corregirá cuando el vector de fuerzas residuales sea calculado. Por lo tanto se calcula el incremento en el esfuerzo debido al incremento de la deformación 3. Se calcula el valor del esfuerzo para el tiempo actual como en (262): El
subíndice e, denota que es basado en un comportamiento elástico.
4. El siguiente paso en el proceso depende de, si o no el elemento ha alcanzado
la fluencia en el paso anterior (n1). Esto puede ser comprobado del valor
conocido del esfuerzo de fluencia:
subíndice p, corresponde a un comportamiento plástico, generalmente cada
elemento posee su nivel independiente de deformación plástic^ o c í
™ r r .n
nivel de esfuerzo permisible. Con esto se debe revisar si:
sabiendo que el
a. Si la respuesta es " S I " , se procede a revisar si el esfuerzo actual es
b. Si la respuesta es "NO", significa que el elemento aún no ha fluido
previamente por lo que se comprueba la siguiente condición:
i. Si la respuesta en NO significa que aun el elemento está en la
etapa elástica, así que solo se actualizan los esfuerzos como
en (262).
ii. Si la respuesta es SI, el elemento ha entrado en etapa de
fluencia durante la aplicación de la carga correspondiente a la
iteración actual. Por lo tanto la porción de los esfuerzos que
son mayores que el esfuerzo de fluencia deben de ser
reducidos a la línea del comportamiento plástico. Utilizando el
factor R =
5. Para elementos en fluencia solamente, calcular el incremento del esfuerzo
cuando el subíndice ep, denota comportamiento elastoplástico.
(257)
(258)
(259)
(260) Sustituyendo (257) y (258)
Así el esfuerzo total es
6. Evaluar el total de la deformación plástica producida para los elementos que
(261)
7. Para elementos elásticos, guarda el valor del esfuerzo actual
(262)
En la Tabla 24 se resume la metodología de solución planteada anteriormente:
[image:45.612.118.497.257.699.2]CAPITULO 3. M O D E L O DE ELEMENTOS FINITOS.
3.1. Elementos con deformación mejorada (Enhanced Assumed Strain)
En los últimos ańos se ha dedicado una especial atención al desarrollo de elementos de
"altas prestaciones". Dicho término engloba a elementos de bajo orden, que presentan una
gran exactitud en mallas de elementos finitos no excesivamente refinadas.
Dichos elementos se han propuesto como variantes de los elementos convencionales
formulados en desplazamientos. Tradicionalmente las mejoras introducidas han consistido en
ajustes adhoc sin más justificación, muchas veces, que la 'de los propios resultados.
Conviene destacar las modificaciones del elemento cuadrilátero de interpolación lineal
introducidas para mejorar su comportamiento a flexión mediante la incorporación de modos de
desplazamiento incompatibles (Wilson, Taylor, Doherty, & Ghaboussi, 1973). Resulta
igualmente destacable la formulación volumétrica media, propuesta por (Rice, Nagtegaal, &
Parks, 1974), como método para evitar el bloqueo de elementos cuadriláteros en condiciones
próximas a la incompresibilidad. De manera similar (Belytschko & Flanagan, 1981), empleando
un operador de proyección, desacoplan la matriz de rigidez en un término subintegrado y un
término de estabilización. (Hughes, 1980), unifica los conceptos de integración reducida y
selectiva así como el planteamiento volumétrico medio mediante la formulación B en la que la
matriz de compatibilidad cinemática deformacióndesplazamiento B es sustituida por otra
modificada B .
De forma paralela ha habido un interés en justificar dichos ajustes, mediante formulaciones
variacionales, con vistas a dotarlos de un planteamiento matemáticamente consistente y un
enfoque más general, ampliando de este modo el campo de aplicación para el que inicialmente
fueron concebidos. Destaca en este sentido la justificación variacional de la formulación B
Recientemente (Simó & Rifai, 1990) ha propuesto una formulación de deformaciones
supuestas mejoradas "Enhanced Assumed Strain" (EAS) que enmarca de forma natural el
planteamiento de modos incompatibles de Wilson y Taylor dentro de un principio variacional de
HuWashizu. En esta formulación el campo de deformaciones supuesto se descompone en un
campo de deformaciones compatible con el campo de desplazamientos y un campo mejorado.
El planteamiento para los elementos mejorados en el contexto de deformaciones supuestas
posee como ventaja fundamental su incorporación natural a problemas distintos de la
elasticidad lineal, y en particular su extensión a problemas de plasticidad en la que la resolución
iterativa del problema no lineal se plantea en incrementos de desplazamientos y por tanto de
deformaciones. Ello motiva que los algoritmos tradicionales de resolución (algoritmos de
retorno, etc.) sigan siendo válidos para estos elementos. De igual forma existen
generalizaciones de esta formulación para problemas geométricamente no lineales según
(Kasper & Taylor, 2000). En los lineamientos planteados por (Kasper & Taylor, 2000) se basa la
metodología empleada en este estudio, especificando los problemas como geométricamente
lineales con deformaciones pequeńas, definiendo la no linealidad a la perdida de rigidez del
material.
3.2. Formulación
3.2.1. Planteamiento del problema variacional
Se parte de la formulación de 3 campos de HuWashizu, para a continuación introducir una
reparametrización con base en las deformaciones supuestas.
Sea un cuerpo elástico S que ocupa un dominio íl c R3. El cuerpo está limitado por una
frontera S = dílque se descompone en dos partes, S = Sá U St. Sobre Sá se conocen los
desplazamientos d, mientras que sobre St son conocidas las tensiones t. El vector normal
exterior a, S se denota por n. Se considera por tanto:
(31)
Para cada punto x G í l se define un campo b de fuerzas por unidad de volumen. Asimismo
se define una función W(E) que corresponde a la densidad de energía interna por unidad de
volumen, dependiente del tensor de deformaciones lineales e. Las incógnitas del problema
corresponden al campo de tensiones a en Í2. La formulación variacional de HuWashizu,
considera los tres campos citados como independientes: (u,Ł,a) G Vx£xS. Donde V , Ł , Ł ,
son los espacios funcionales de cuadrado integrable de las funciones solución en
desplazamientos, deformación y tensión respectivamente.
El funcional de HuWashizu en función de los tres campos mencionados es:
Los campos solución (e, a, u) serán aquellos para los que el funcional n(Ł, a, u) tome un
valor estacionario. Igualando a cero la variación del funcional para valores arbitrarios
(SE, 8a, S u ) , se obtienen tres ecuaciones que expresan las condiciones de equilibrio,
compatibilidad y constitutivas respectivamente:
(33)
(34)
(35)
Se admite una reparametrización del campo de deformaciones de la forma:
(36)
Donde Vs
u (parte simétrica del gradiente de desplazamientos) es la componente
"compatible" del campo de deformaciones, y ees la componente "mejorada" del campo de
deformaciones.
Esta denominación responde a que, como se verá a continuación, para la solución
aproximada discreta, el campo e permite mejorar dicha aproximación. No es preciso imponer
ningún requerimiento de continuidad a priori al campo Ł entre los distintos elementos. Con esta
reparametrización, las nuevas ecuaciones resultan:
Para todas las posibles variaciones (6c, 6a, Su) EVxSxS , donde e es el espacio de las
variaciones admisibles de deformaciones mejoradas.
Las ecuaciones de EulerLagrange, o formulación fuerte del problema variacional
correspondiente a las ecuaciones (37) resultan Vx G í l :
(37)
e = 0 (38)
Conviene hacer notar que las ecuaciones anteriores corresponden al problema convencional
de elasticidad, con la salvedad de que la tensión es función no solo de la deformación
"compatible" ( Vsu), sino también de la mejorada (e). Dicho planteamiento puede parecer trivial
ya que la solución exacta a las deformaciones mejoradas son idénticas a cero según (38)c, sin
embargo no resulta así en el problema discreto, como comprobaremos más adelante.
3.3. Discretización de las ecuaciones variacionales
3.3.1. Aproximación del campo de deformaciones compatibles
Para el campo de deformaciones compatibles es posible establecer la aproximación
habitual isoparamétricas de elementos finitos. Sea ue h
E Vh
c V y Vsuh G Vs
Vh
c W ,
siendo Vh y Vs
Vh
espacios funcionales de dimensión finijta, asociados a una discretización "h".
La aproximación se realiza mediante las funciones de forma N(Ł), referidas a coordenadas isoperamétricas
(39)
(310)
Donde es el operador de interpolación de deformaciones del elemento y de son los desplazamientos nodales del elemento.
3.4. Aproximación del campo de deformaciones mejorado (Enhanced Assumed Strain)
Es posible establecer un criterio de aproximación para E similar al definido en el campo de deformaciones compatibles. Sea
(311)
Donde es el operador de interpolación de deformaciones mejoradas del
elemento, cceson parámetros internos del elemento, generadores del campo de deformaciones
mejoradas. Se sustituyen las aproximaciones (39), (310) y (311) en las ecuaciones
Estas ecuaciones corresponden en general a un sistema no lineal de ecuaciones cuyas
incógnitas son, además de de(las usuales en una formulación en desplazamientos), las variables adicionales ae, debidas a la variación independiente de s. La resolución de este sistema se
efectúa convencionalmente mediante el procedimiento de NewtonRaphson. Conviene resaltar
q u e ae son variables internas a nivel de cada elemento, por lo que pueden se calculadas sin
necesidad de ensamblar el sistema de ecuaciones globales; de esta forma, para una iteración (k)
del sistema global se ha de verificar para cada elemento.
(312)
Dónde:
3.5. Metodología de resolución de las ecuaciones de elementos finitos
Partiendo de las ecuaciones variacionales discreteadas (312), si 6de son arbitrarios:
(313)
(314)
Linealizando estas ecuaciones, se obtiene la siguiente ecuación matricial:
Dónde:
Eliminando A ae de (315):
Se obtiene la ecuación matricial condensada:
(315)
(316)
(317)
(318)
(319)
(320)
(321)
Donde se han empleado las matrices de rigidez y fuerza interna modificadas definidas por:
(322)
Conviene hacer notar que a pesar de que el planteamiento se ha enmarcado en el contexto
de la elasticidad no lineal, se puede extender al campo de la plasticidad sin más que sustituir el
operador constitutivo tangente de la elasticidad definido en (319) por el operador
CAPITULO 4. M O D E L O NOLINEAL DE SOLUCIÓN: NEWTONRAHPSON.
4.1. Modelos conceptuales.
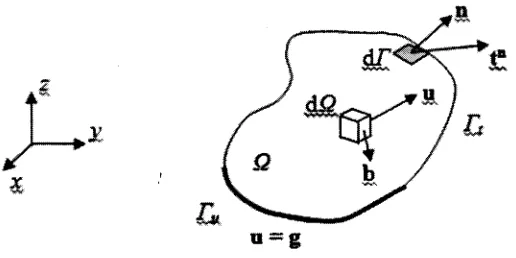
El modelo más general del problema mecánico estático se presenta en la Figura 41 en donde
se tiene un cuerpo con un volumen Q y una superficie I".
Los vectores de posición x se consideran como las únicas variables independientes del
problema. En este cuerpo, pueden estar actuando dos tipos de fuerzas externas, las tracciones
externas tn sobre la parte l"t de la frontera, y las fuerzas de cuerpo b, en el volumen Q. El movimiento se representa por el desplazamiento u de los puntos materiales que conforman el
cuerpo y se especifica como condición de frontera en la superficie l~u en donde se le asigna un
valor conocido g. En las partículas que forman este cuerpo estamos interesados en conocer el
desplazamiento u, el estado de esfuerzo o y la deformación e.
La frontera se compone, por lo tanto, de dos partes que se complementan y no se
superponen
(41)
La tracción externa tn tiene unidades de fuerza por unidad de área y emplea el superíndice n,
ya que ese es el vector unitario normal a la superficie en el punto de aplicación de la tracción di".
El vector b tiene unidades de fuerza por unidad de volumen y actúa sobre diferenciales de
volumen dQ.
Las fuerzas y el desplazamiento que se especifican son función de la posición únicamente en
este tipo de problemas:
Figura 41. Modelo General de un Cuerpo mecánico sólido
Si las condiciones de frontera tn y g y las fuerzas de cuerpo b se hacen dependientes también
del tiempo t, entonces el desplazamiento u, el esfuerzo a y la deformación E también se harán funciones del tiempo.
(43)
Si la rapidez con que cambian las condiciones de frontera y las fuerzas de cuerpo activan las
fuerzas inerciales del material entonces el análisis se considerará dinámico, de otra manera es
un análisis cuasKestático, es decir, el análisis del cuerpo al tiempo tn se puede realizar como un
análisis estático con las condiciones de frontera y fuerzas de cuerpo evaluadas en ese tiempo.
Debe notarse que el modelo conceptual mostrado en la Figura 41 no cambia, lo que se modifica es el tipo de variables independientes que controla las condiciones de frontera y las
fuerzas de cuerpo. Tanto para análisis dinámicos como estáticos el comportamiento del cuerpo
puede ser lineal o no lineal. Normalmente se consideran dos fuentes de no linealidad en la
respuesta de un cuerpo, la relación constitutiva del material y el efecto de cambios geométricos
grandes en la configuración del cuerpo, ambos se consideran a continuación.
Debe observarse que en un análisis no lineal estático el tiempo es un pseudotiempo en
realidad y funciona más como un parámetro, que permite controlar los cambios que ocurren en
[image:55.612.135.393.84.213.2]4.2. Análisis estático no lineal 4.2.1. Material no lineal
Consideramos aquí el caso en que la relación constitutiva del material es no lineal, lo que
quiere decir que el esfuerzo depende de la historia de la deformación. Se utilizarán una serie de
variables, llamadas variables internas, que registran la historia de la deformación y el estado
actual del material.
Se parte de que se conoce el estado actual del material al tiempo tn y estamos interesados
en conocer el valor del esfuerzo y el valor de las variables internas al tiempo tn +i.
4.2.2. Forma Fuerte del Problema de Valores de Frontera
En la Figura 41 se presenta la formulación fuerte del problema al tiempo tn +i. Variables
independientes: x.
Tabla 41. Forma fuerte del problema de valores de frontera estática para deformaciones infinitesimales
(44)
[image:56.612.68.511.490.700.2]4.2.3. Principio Variacional Gobernante
Se definen dos espacios de funciones U y V. U define el espacio de las funciones de prueba,
que son desplazamientos en el dominio Q, como una función real en 3 dimensiones que
pertenece a la clase de funciones H_ (O.) y que cumple con las condiciones de frontera esenciales
en Tu:
V define el espacio de las funciones de desplazamiento virtual en Q como funciones reales
en 3 dimensiones que pertenece a la clase de funciones Hi(Q) y que cumple con las condiciones
de frontera homogéneas en l~u. Observe que las funciones de V no pueden ser soluciones porque
no cumplen con las condiciones de frontera esenciales:
El Principio del Trabajo Virtual se plantea en la Figura 41. Variable independiente es x.
Tabla 42. Forma débil del problema para deformaciones infinitesimales al tiempo tn+1.
(46)
(47)
4.2.4. Discretización
Considérese una interpolación estándar para elementos finitos de la forma: