CHRISTIAN FELIPE RAMIREZ ACOSTA
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ELECTRÓNICA
CHRISTIAN FELIPE RAMIREZ ACOSTA
TRABAJO DE INVESTIGACION
MAESTRIA EN INGENIERIA ELECTRONICA
DIRECTOR:
IE. DIEGO ALEJANDRO PATIÑO GUEVARA, PH. D.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE ELECTRÓNICA
FACULTAD DE INGENIERÍA
MAESTRIA EN INGENIERIA ELECTRONICA
RECTOR MAGNIFICO: Padre Joaquín Sánchez García S.J.
DECANO ACADÉMICO: Ing. Luis David Prieto Martínez
DECANO DEL MEDIO UNIVERSITARIO: P. Sergio Bernal S.J.
DIRECTOR DE MAESTRIA: Ing. Cesar Leonardo Niño, Ph.D.
DIRECTOR DEL PROYECTO: Ing. Diego Alejandro Patiño Guevara, Ph.D.
La u iversidad o se ha e respo sa le de los o eptos e itidos por sus alu os e sus proyectos de grado. Solo velará porque no se publique nada contrario al dogma y la moral católica y porque los trabajos no contengan ataques o polémicas puramente personales. Antes bien, que se vea e ellos el a helo de us ar la verdad la justi ia
LISTA DE FIGURAS... 8
INTRODUCCION ... 10
1. DESCRIPCION GENERAL DEL SISTEMA DE TANQUES ... 12
1.1. INSTRUMENTACION DEL SISTEMA ... 13
1.1.1. MEDIDOR DE CAUDAL ... 13
1.1.2. TRANSMISOR DE PRESIÓN DIFERENCIAL... 13
1.1.3. TRANSMISOR DE PRESIÓN MANOMÉTRICO ... 14
1.1.4. MEDIDOR DE NIVEL CAPACITIVO ... 14
1.1.5. MEDIDOR DE NIVEL POR RADAR DE ONDA GUIADA ... 14
1.1.6. SWITCH DE NIVEL VIBRATORIO ... 15
1.1.7. VÁLVULA GLOBO DE CONTROL ... 15
1.1.7.1. ACTUADOR DIAFRAGMA RESORTE ... 15
1.1.8. VÁLVULA DE BOLA ... 16
1.1.8.1. ACTUADOR PIÑÓN CREMALLERA ... 16
1.2. COMUNICACIÓN DEL SISTEMA ... 16
1.2.1. PROFIBUS DP ... 17
1.2.2. PROFIBUS PA ... 17
1.2.3. COMUNICACIÓN ENTRE SISTEMA DE TANQUES Y PC ... 18
1.3. MODOS OPEREACION ... 18
1.3.1. MODO OPERACIÓN A ... 18
1.3.2. MODO OPERACIÓN B ... 19
2. MODELADO DE UN SISTEMA NO LINEAL COMO UN SISTEMA DINAMICO HIBRIDO ... 20
2.1. OBTENCIÓN DE LOS DATOS ... 20
2.1.1. ELECCIÓN DE LAS SEÑALES A MEDIR ... 20
2.1.2. ELECCIÓN DEL TIPO DE ENTRADAS ... 21
2.1.3. ELECCIÓN DEL PERIODO DE MUESTREO ... 21
2.2. IDENTIFICACIÓN MODELO PWARX... 21
2.2.1. ALGORITMOS ... 22
2.2.1.1. CLASIFICACIÓN INICIAL ... 22
2.2.1.2. REFINAMIENTO ... 23
2.3.1. FIT ... ¡Error! Marcador no definido.
3. CONTROL PARA SISTEMAS DINAMICOS HIBRIDOS ... 26
3.1. ESTABILIDAD EN LOS SISTEMAS DINAMICOS HIBRIDOS ... 26
3.1.1. FUNCION MULTIPLE DE LYAPUNOV ... 27
3.2. DISEÑO DE LA LEY DE CONTROL ... 27
3.2.1. FORMULACIÓN DEL PROBLEMA ... 28
3.2.2. CONTROL POR ESTABILIZACIÓN ... 29
4. IDENTIFICACION DEL SISTEMA DE TANQUES EN MODO A COMO UN SISTEMA DINAMICO HIBRIDO. ... 30
4.1. VALIDACIÓN DEL MODELO DINÁMICO ... 30
4.1.1. VÁLVULA DE CONTROL CV 01 ... 32
4.1.2. CARACTERÍSTICA INSTALADA DE LA VÁLVULA CV 01 ... 33
4.2. OBTENCIÓN DE LOS DATOS ... 34
4.2.1. SEÑALES A MEDIR ... 34
4.2.2. TIPO DE ENTRADAS ... 34
4.2.3. TIEMPO DE MUESTREO ... 35
4.3. IDENTIFICACIÓN MODELO PWARX... 35
4.3.1. MODELO PWARX PARA EL TK-01 ... 35
4.3.1.1. ALGORITMOS ... 36
4.3.1.2. ESTIMACIÓN DE LA REGIÓN DE OPERACION ... 37
4.3.2. MODELO PWARX PARA EL TK-02... 37
4.3.2.1. ALGORITMOS ... 38
4.3.2.2. ESTIMACIÓN DE LA REGIÓN ... 39
4.4. VALIDACIÓN DEL MODELO PWARX ... 40
4.4.1. FIT ... 40
4.5. REPRESENTACIÓN DEL MODELO PWARX EN ESPACIO DE ESTADOS ... 41
5. IDENTIFICACION DEL SISTEMA DE TANQUES EN MODO B COMO UN SISTEMA DINAMICO HIBRIDO. ... 46
5.1. VALIDACIÓN DEL MODELO DINÁMICO ... 46
5.1.1. VÁLVULA DE CONTROL CV 01 ... 48
5.2.2. TIPO DE ENTRADAS ... 49
5.2.3. TIEMPO DE MUESTREO ... 49
5.3. IDENTIFICACIÓN MODELO PWARX... 49
5.3.1. MODELO PWARX PARA EL TK-01 ... 49
5.3.1.1. ALGORITMOS ... 50
5.3.1.2. ESTIMACIÓN DE LA REGIÓN ... 51
5.3.2. MODELO PWARX PARA EL TK-02... 52
5.3.2.1. ALGORITMOS ... 52
5.3.2.2. ESTIMACIÓN DE LA REGIÓN ... 53
5.4. VALIDACIÓN DEL MODELO PWARX ... 53
5.4.1. FIT ... 53
5.5. REPRESENTACIÓN DEL MODELO PWARX EN ESPACIO DE ESTADOS ... 55
CONCLUSIONES ... 59
Figura 1- Diagrama P&ID del Sistema de Tanques ... 12
Figura 2- Principio de medición del medidor capacitivo ... 14
Figura 3 - Actuador diafragma resorte ... 15
Figura 4 - Acción del actuador. (a) Procedimiento para abrir (b) Procedimiento para cerrar ... 16
Figura 5 - Red de comunicación del sistema de tanques de la Figura 1 ... 17
Figura 6 – Red de comunicación entre el Sistema de tanques y PC... 18
Figura 7- Estabilidad de los SDH ... 26
Figura 8 - Estabilidad de un sistema a través de funciones múltiples de Lyapunov. Numero de sistemas 2. La línea continua representa el sistema activo en el instante de tiempo . ... 27
Figura 9 – Lazo de control para el SDH... 28
Figura 10-Sistema de tanques en modo de operación 4 ... 30
Figura 11 - Datos Entrada - Salida Modo 4 ... 31
Figura 12 - Diferencia entre el sistema real y el sistema simulado ... 31
Figura 13 - Sistema real y Simulado con los parámetros estimados ... 32
Figura 14 - Válvula de Control ... 32
Figura 15 - Experimentos en la válvula de control ... 33
Figura 16 - Característica instalada de la válvula de control ... 34
Figura 17-Modelo a Identificar. Entradas y Salidas ... 34
Figura 18- Adquisición de datos experimentales del sistema de tanques en el modo A ... 35
Figura 19-Datos experimentales para la identificación de TK-01 ... 36
Figura 20-Identificación inicial del TK-01, donde cada marca representa un submodelo ... 36
Figura 21 - Identificación final de TK-01, donde cada símbolo representa un submodelo... 37
Figura 22 - Regiones de operación para el sistema PWARX de TK-01 ... 37
Figura 23 – Datos experimentales para la identificación de TK-02 ... 38
Figura 24 - Identificación final de TK-01, donde cada símbolo representa un submodelo... 38
Figura 25- Identificación final de TK-02, donde cada símbolo representa un submodelo, para un total de 2 submodelos. ... 39
Figura 26 - Regiones de operación del modelo PWARX de TK-02 ... 39
Figura 29-Modelo PWARX TK-01, FIT=88.7398%. Sistema Real en rojo, Modelo PWARX en negro 40 Figura 30-Modelo PWARX TK-02, FIT=83.7398%. Sistema Real en rojo, Modelo PWARX en negro 40 Figura 31-Modelo PWARX TK-01, FIT=94.3316%. Sistema Real en rojo, Modelo PWARX en negro 40 Figura 32-Modelo PWARX TK-02, FIT=87.1322%. Sistema Real en rojo, Modelo PWARX en negro 40 Figura 33-Modelo PWARX TK-01, FIT=86.4370%. Sistema Real en rojo, Modelo PWARX en negro 41 Figura 34-Modelo PWARX TK-02, FIT=80.5802%. Sistema Real en rojo, Modelo PWARX en negro 41 Figura 35-Modelo PWARX TK-01, FIT=85.8015%. Sistema Real en rojo, Modelo PWARX en negro 41 Figura 36-Modelo PWARX TK-02, FIT=87.4681%. Sistema Real en rojo, Modelo PWARX en negro 41 Figura 37 - Control para el SDH, diseñado a través del Teorema 3 ... 43
Figura 38 - Control Conmutado, Utilizando el Teorema 1 ... 44
Figura 42 - Sistema real y simulado con los parámetros estimados ... 48
Figura 43 - Modelo a Identificar. Entradas y Salidas ... 48
Figura 44- Adquisición de datos experimentales del sistema de tanques en el modo B ... 49
Figura 45-Datos Experimentales para la identificación de TK-01 ... 50
Figura 46 - Identificación inicial del TK-01, donde cada marca representa un submodelo ... 50
Figura 47 - Identificación final de TK-01, donde cada símbolo representa un submodelo... 51
Figura 48 - Identificación final para TK-01, se observa la región de operación para cada submodelo. ... 51
Figura 49 - Datos Experimentales para la identificación de TK-02 ... 52
Figura 50 - Identificación preliminar de TK-02 ... 52
Figura 51- Identificación final de TK-02 ... 53
Figura 54 - Modelo PWARX TK-01, FIT=93.18%. Sistema Real en rojo, Modelo PWARX en negro... 54
Figura 55 - Modelo PWARX TK-02, FIT=87.3273%. Sistema Real en rojo, Modelo PWARX en negro ... 54
Figura 56 - Modelo PWARX TK-01, FIT=91.79%. Sistema Real en rojo, Modelo PWARX en negro... 54
Figura 57 - Modelo PWARX TK-02, FIT=76.36.04%. Sistema Real en rojo, Modelo PWARX en negro ... 54
Figura 58 - Modelo PWARX TK-01, FIT=93.5436%. Sistema Real en rojo, Modelo PWARX en negro ... 54
Figura 59 - Modelo PWARX TK-02, FIT=90.0365%. Sistema Real en rojo, Modelo PWARX en negro ... 54
Figura 60 - Modelo PWARX TK-01, FIT=90.0496%. Sistema Real en rojo, Modelo PWARX en negro ... 55
Figura 61 - Modelo PWARX TK-02, FIT=74.1790%. Sistema Real en rojo, Modelo PWARX en negro ... 55
Figura 62 - Controlador para el modo 3, obtenido con el Teorema 4 ... 56
Figura 63 - Implementación control para el modo 3 ... 57
Figura 64 - Implementación control para el modo 3 ... 57
INTRODUCCION
Actualmente, los computadores, las redes digitales y los sistemas embebidos son cada vez más complejos. Esto hace necesario un análisis profundo del acople entre los componentes que están basados en la lógica digital y los sistemas físicos que son, por naturaleza, continuos. La teoría clásica de sistemas dinámicos es, por lo tanto, insuficiente debido a que se basa en sistemas descritos matemáticamente mediante ecuaciones diferenciales (caso continuo) o ecuaciones de diferencias (caso discreto).
La comunidad científica ha comenzado a estudiar recientemente los sistemas que incluyen variables de estado continuas y discretas simultáneamente y además están acopladas entre si. Estos sistemas se denominan comúnmente Sistemas Dinámicos Híbridos (SDH) y debido a su reciente aparición, el modelado y el posterior control de los mismos, tiene muchos aspectos teóricos y prácticos aún no resueltos, por lo que su estudio representa muchos beneficios en el área. Actualmente, no existe ningún método general que permita el análisis de estabilidad, la identificación, el control y el diseño de observadores para los SDH.
En este proyecto se expone un sistema de tanques interactuantes no lineal visto desde el enfoque de los sistemas dinámicos híbridos. Los tanques interactuantes son considerados como dispositivos ampliamente utilizados en todo tipo de industria y en muchas ocasiones requieren un control de alta precisión tanto de flujo de líquido circulante como del nivel de llenado. Debido a la naturaleza del sistema, los tanques obedecen a un comportamiento no lineal que generalmente se aproximan a una dinámica lineal y estas aproximaciones conllevan a leyes de control que no son completamente apropiadas. Una razón para usar los SDH es la reducción de complejidad del modelo en orden, y en lugar de tener que representar la dinámica a partir de un conjunto de ecuaciones diferenciales no lineales, se puede representar el mismo sistema por medio de un conjunto de ecuaciones simples de comportamiento lineal que por medio de conmutaciones controladas o autónomas entre estas emulan el comportamiento no lineal de un sistema. Los SDH son capaces de tener en cuenta los aspectos no lineales en el modelo y por lo tanto producir estrategias de control mucho más precisas.
Los esfuerzos recientes en la investigación de sistemas dinámicos híbridos típicamente se centran en el análisis del comportamiento dinámico de los mismos y tienen como meta el diseño de controladores con una estabilidad y funcionamiento garantizado. Se han analizado algunas formas de modelamiento mediante sistemas lineales a tramos y sistemas dinámicos mixtos, además del diseño de estrategias de control utilizando modelos de control predictivo [1] , [2], [3]. Este tipo de control, generalmente, se basa en un conocimiento exacto del modelo del sistema. Por lo tanto, cuando los parámetros del modelo no se encuentran bien identificados, las señales de control pueden ser erróneas. Por el lado de la estabilidad en los SDH se ha comprobado que el problema de regulación alrededor un valor de referencia puede resolverse mediante teoremas de estabilidad [4], en donde el uso de estos métodos realmente busca una ley de control por realimentación de estados capaz de estabilizar el sistema independiente de la conmutación y no se interesa en buscar la mejor forma de conmutar entre los subsistemas posibles.
parámetro el horizonte de predicción, el cual implica resolver diferentes programas de optimización en cada instante de muestreo y, por lo tanto, la señal de control podría no estar disponible en tiempo real. Por esto, diversas técnicas han tratado de resolver esta dificultad, bien sea interpolando las soluciones óptimas con redes neuronales [9], [10] o formulaciones basadas en progra a ió di á i a i ta ta las de o i adas de look-up [5], [11], [12]. Una de las consecuencias de las interpolaciones es la pérdida de la característica óptima de la solución que se aplica al sistema. Por último, las técnicas que se basan en la teoría de pasividad [13], [14] permiten controlar el sistema por modos deslizantes [15], [16].
Este proyecto pretende trabajar con un sistema de tanques interactuantes que hace parte de un tra ajo de grado realizado e la U iversidad Javeria a lla ado I ge iería Detallada, Modelado y Simulación De Un Sistema De Tanques Interactuantes No Lineales (2010 . Este trabajo al igual que este proyecto hace parte de un trabajo de investigación del grupo CEPIT [17] Avances En El Control De Sistemas Dinámicos Híbridos. Aplicación En Sistemas De Tanques Interactuantes No Li eales fi a iado por la vi erre toría.
Para el desarrollo de este trabajo de grado se plantea como objetivo general formular estrategias de control que permitan solucionar el problema de regulación del nivel del agua alrededor de una referencia en un sistema de tanques interactuantes no lineal, visto como un sistema dinámico hibrido. Y como objetivos específicos los siguientes:
1. Encontrar un modelo matemático (Identificar) de cada uno de los modos de operación del sistemas de tanques como un sistema dinámico hibrido.
2. Aplicar una ley de control basada en una realimentación de estados conmutada [4], para cada uno de los modelos identificados.
1.
DESCRIPCION GENERAL DEL SISTEMA DE TANQUES
[image:12.612.88.536.290.632.2]El sistema está compuesto por cuatro tanques en total (Figura 1), uno de ellos será el tanque de reserva (TK-003) donde estará contenido todo el volumen de agua del que se dispondrá. Existen otros dos tanques que son los elementos de análisis, los cuales tendrán un caudal de entrada en la parte superior y un caudal de salida a través de un orificio situado en la parte inferior en ambos casos (TK-01 y TK-02). Por último, está el tanque (TK-04) que tiene la función de retardar el caudal de entrada en alguno de los dos tanques de interés y por medio de una válvula se puede escoger el paso de caudal entre línea directa o por el tanque de retardo. Cabe anotar que los tanques forman un circuito hidráulico cerrado en donde el agua circula todo el tiempo sin salir del sistema. Por otra parte el sistema posee una bomba hidráulica que genera la energía necesaria para hacer circular al agua por todo el circuito, venciendo las columnas de agua, la fricción en la tubería y en los demás equipos instalados en la línea. En la Tabla 1 se puede observar las características de cada uno de los tanques.
Figura 1- Diagrama P&ID del Sistema de Tanques
o por el retardo; y en segundo lugar se encuentran los modos en que los tanques de interés se comunican entre sí, formando un sistema interactuante.
Tanque No Lineal Tanque Cilíndrico Tanque de Reserva
Radio(mm) 600 300
Altura(mm) 700 500
Largo(mm) 1000
Ancho(mm) 700 900
Tabla 1 - Especificaciones Tanques
1.1.
INSTRUMENTACION DEL SISTEMA
El sistema cuenta con un completo grupo de instrumentación que permite adquirir información en tiempo real, acerca de variables de proceso como nivel, presión y caudal. Toda la instrumentación se comunica a través del protocolo de comunicaciones industriales PROFIBUS a un PLC (Programmable logic controller) con el que cuenta el sistema, permitiendo una completa automatización de la planta, y dando la posibilidad de aplicar diferentes técnicas de control al sistema. Entre los dispositivos se encuentran: transmisor de caudal, transmisores de nivel, switch de nivel, transmisores de presión y válvulas.
1.1.1.
MEDIDOR DE CAUDAL
El medidor de caudal (FT 01), ubicado en la línea de descarga de la bomba centrifuga, tiene la función de comunicar al controlador, en tiempo real, cual es la cantidad de flujo volumétrico que pasa por esa tubería. Uno de los propósitos de este medidor es hallar la curva característica de la válvula de control LCV 01 (Porcentaje de apertura Vs Caudal) y la curva característica de la bomba hidráulica (Presión Vs Caudal).
El medidor de caudal (FT 01) es del tipo electromagnético, este tipo de medidores se basan en el principio de Faraday que establece que la fuerza electromotriz inducida en un elemento conductor que se mueve a lo largo de un campo magnético, es proporcional a la velocidad del conductor de interés. En el medidor electromagnético, el líquido que pasa a través del medidor cumple el papel de conductor, por lo que la fuerza electromotriz inducida en el fluido, debido al campo magnético generado por las bobinas ubicadas en el interior del medidor, es proporcional a la velocidad de desplazamiento y por consiguiente al caudal.
1.1.2.
TRANSMISOR DE PRESIÓN DIFERENCIAL
El transmisor de presión PT02 está ubicado aguas arriba y aguas abajo de la válvula de control LCV 01 y tiene la función de medir la caída de presión diferencial sobre la válvula, en tiempo real, este dato permite la comprobación del modelo y caracterización del sistema. Con los datos transmitidos desde este transmisor también se puede obtener la curva característica de la válvula.
1.1.3.
TRANSMISOR DE PRESIÓN MANOMÉTRICO
Un transmisor de presión manométrica con un sello remoto se puede utilizar para medición de presión ya sea en una tubería o tanque del proceso.
El transmisor de presión PT 01 va a ser posicionado en la descarga de la bomba centrífuga y se encargará de transmitir al controlador, en tiempo real, la presión en este punto. Este transmisor tendrá dos propósitos, en primer lugar realizar la caracterización del comportamiento de la bomba y en segundo lugar alertar al controlador en caso que la bomba este alcanzando su presión máxima de operación y así realizar una parada de emergencia.
1.1.4.
MEDIDOR DE NIVEL CAPACITIVO
LT 02 es un medidor de nivel capacitivo, este mide la capacitancia del condensador formado por el electrodo sumergido en el líquido y las paredes del tanque. El valor medido de la capacitancia depende linealmente del nivel del líquido en el tanque (Figura 2).
Figura 2- Principio de medición del medidor capacitivo
La capacidad del condensador es influenciada principalmente por tres factores:
1. Distancia de las superficies de los electrodos. 2. Tamaño de la superficie de los electrodos. 3. Tipo de dieléctrico entre los electrodos.
Aquí los electrodos y la pared del depósito son las placas del condensador. El producto es el dieléctrico. La capacidad del condensador aumenta a medida que crece el recubrimiento de los electrodos a causa de la elevada constante dieléctrica del producto en comparación con el aire. Por las condiciones de la geometría del tanque 2 (TK 002) se determina que el principio de medición que más se ajusta a las necesidades del proceso es la medición por medio de un transmisor de nivel capacitivo. Este transmisor tendrá como función comunicar al controlador, de manera continua, el nivel actual de agua en el tanque en un rango proporcional de 0 – 100.
1.1.5.
MEDIDOR DE NIVEL POR RADAR DE ONDA GUIADA
con la distancia recorrida y de esta manera se detecta el nivel del líquido. Una característica general de la onda de pulso es que varía de 100 MHz a 1.5 GHz.
1.1.6.
SWITCH DE NIVEL VIBRATORIO
El switch de nivel vibratorio se usa como interruptor de nivel universal en líquidos. Detecta de una forma fiable y con precisión de milímetros cuando se alcanza un determinado nivel. Se puede usar en depósitos y tuberías en cualquier posición de instalación. El equipo también se puede usar como detector de lleno o vacío, como protección contra sobrellenado, protección contra marcha en seco o protección en bombas.
El switch de nivel LS 03 está ubicado de manera horizontal en uno de los costados del tanque de reserva (TK 003). La función de este instrumento es asegurar que la bomba centrifuga tenga una altura de agua adecuada para su funcionamiento. En el momento que el nivel de agua en el tanque este por debajo del nivel necesario para que la bomba opere correctamente, el transmisor envía una señal al controlador para apagar la bomba.
1.1.7.
VÁLVULA GLOBO DE CONTROL
La válvula globo CV 01 con la que cuenta el sistema es una Baumann modelo 54-24 688 de FISHER
y sus características son:
Diámetro del uerpo de la válvula de ½
Coeficiente de flujo Cv=6
Bench range de 5 – 15 psi
La válvula globo está instalada en la línea de descarga de la bomba, después del transmisor de presión y de flujo y está conformada por un actuador y posicionador para controlar la apertura de la válvula proporcionalmente.
La válvula se dimensiona según las siguientes variables: el máximo y mínimo flujo, presión máxima de entrada y salida, coeficiente de flujo Cv y algunas características físicas del fluido como la viscosidad, densidad, presión de vapor entre otros. Estas características corresponden a las del agua que es el fluido con el cual se va a trabajar.
1.1.7.1.
ACTUADOR DIAFRAGMA RESORTE
[image:15.612.246.367.587.692.2]El actuador diafragma resorte está basado en el movimiento de un resorte que se deforma bajo la acción de la señal de aire proporcionado procedente del controlador o convertidor electro-neumático. Los resortes empujan el vástago hacia abajo en caso de acción directa o lo empuja hacia arriba si es de acción inversa. El movimiento del vástago se contrarresta con la acción del resorte (Figura 3)
1.1.8.
VÁLVULA DE BOLA
La válvula de bola CV 02 está situada entre los tanques cilíndrico y no lineal, lo que permite controlar el flujo de agua que pasa de un tanque al otro cuando se realice el experimento interactuante. La válvula está conformada por varios instrumentos que permiten que sea automatizada y controlada desde el PLC.
1.1.8.1.
ACTUADOR PIÑÓN CREMALLERA
En su modo de funcionamiento, el vástago es una cremallera que acciona un piñón y transforma el movimiento lineal en un movimiento giratorio, hacia la izquierda o hacia la derecha, según el se tido del é olo. Los á gulos de giro orrie tes puede ser de ˚, ˚, ˚, ˚ hasta ˚. Es posible determinar el margen de giro dentro del margen total por medio de un tornillo de ajuste que modifica la posición de la carrera del vástago. El par de giro está en función de la presión, de la superficie del embolo y de la desmultiplicación. Para abrir la válvula, el aire su i istrado a la e trada de e pulsa los pisto es ha ia el exterior, comprimiendo los muelles, e pulsa do el aire por la e trada se o tie e u giro o trario al de las a e illas el reloj, según la Figura 4.a.
Para errar la válvula se deja de su i istrar presió de aire fallo de aire e la e trada , ocasionando que los muelles empujen los pistones hacia adentro, expulsando el aire por la e trada se o tie e u giro e se tido de la agujas del reloj, segú la Figura 4.b.
(a) (b)
Figura 4 - Acción del actuador. (a) Procedimiento para abrir (b) Procedimiento para cerrar
1.2.
COMUNICACIÓN DEL SISTEMA
Toda la instrumentación se comunica a través del bus de campo PROFIBUS a un PLC (Controlador Lógico Programable). Este sistema permite establecer la comunicación entre el sistema de control y los dispositivos instalados en el sistema de tanques a través de un único cable. Esta comunicación se caracteriza por la transferencia cíclica de datos de proceso y la transmisión acíclica de alarmas, parámetros y datos de diagnóstico.
1.2.1.
PROFIBUS DP
PROFIBUS DP desarrollado para altas velocidades de transmisión de datos (hasta 12 Mbits/s) y tiempos de reacción reducidos (hasta 1 ms) es una solución excelente para el control directo de dispositivos inteligentes de campo, por ejemplo arrancadores de motor, accionamientos, analizadores, reguladores de proceso o paneles.
1.2.2.
PROFIBUS PA
PROFIBUS PA, permite transmitir por el mismo cable los datos digitales y alimentar al sistema con energía, utilizando cables bifilares y aplicando la tecnología de transmisión MBP (Manchester Coded; Bus Powered). La velocidad de transmisión es de 31,25 kbits/s relativamente pequeña comparándolo con el tiempo típico de comunicación de un transmisor que es aproximadamente de 10 ms. Esto permite implementarse prácticamente en todas las aplicaciones típicas en la industria de procesos.
Dado que el sistema de tanques cuenta con dispositivos PROFIBUS PA y PROFIBUS DP es necesario un modulo acoplador denominado DP/PA Link con el fin de alimentar y adaptar la velocidad de transmisión entre los dispositivos. El DP/PA Link opera como esclavo en PROFIBUS DP y como maestro en PROFIBUS PA. Visto desde el PLC, el DP/PA Link es un esclavo modular cuyos módulos constituyen los dispositivos PROFIBUS PA.
Identificados los componentes que conforman al sistema de tanques y el bus de campo a utilizar, la de la red de comunicación que se implemento fue una de tipo árbol, como se muestra en la siguiente Figura 5.
Figura 5 - Red de comunicación del sistema de tanques de la Figura 1
En la Figura 5 se puede observar los componentes Profibus PA que son: actuador de la válvula, sensor de presión diferencial, sensor de presión manométrica, Sensor de nivel del tanque TK-01 (Radar de onda Guiada), Sensor de nivel del tanque TK-02 (Medidor de nivel capacitivo), Sensor de flujo magnético. Y los componentes Profibus DP que son; el modulo de entradas y salidas digitales utilizado para la activación de alarmas de seguridad en el sistema y el acoplador DP/PA, que como se explico anteriormente permite la comunicación entre los dispositivos PA y DP.
VARIABLE DE PROCESO DIRECCION MEMORIA PLC DESCRIPCION
Presión diferencial PID 587 Presión Diferencial
Presión manométrica PID 557 Presión Manométrica
Flujo PID 517 Flujo Magnético
Nivel Tanque lineal PID 567 Nivel Capacitivo (TAK 2)
Nivel tanque no lineal PID 577 Nivel Onda Guiada (TAK 1)
Posición válvula PID 592 Datos del posicionador
Set point Válvula PQD 522 Establece la posición válvula
Status Set point PQB 526 Confirmación set point
Tabla 2 - Direcciones memoria PLC
1.2.3.
COMUNICACIÓN ENTRE SISTEMA DE TANQUES Y PC
Con el objetivo de realizar una comunicación entre el PLC y el PC que permita el análisis de las variables de proceso y la implementación de leyes de control en el sistema de tanques, se opta por establecer una comunicación OPC. Esta infraestructura de comunicación es una aplicación típica en el área industrial y consta de 3 componentes que son; fuentes de información (PLC, DCS, RTU, Protocolos, Bases de Datos, Hojas de Cálculo, etc.). Un servidor OPC el cual es una aplicación de software encargado de realizar la interfaz entre las fuentes de información y el tercer componente conocido como Cliente OPC, que en este caso es Labview, el que será el usuario final de la información, La red de comunicación entre el sistema de tanques y el PC se puede observar en la siguiente grafica Figura 5.
Figura 6 – Red de comunicación entre el Sistema de tanques y PC
1.3.
MODOS OPEREACION
1.3.1.
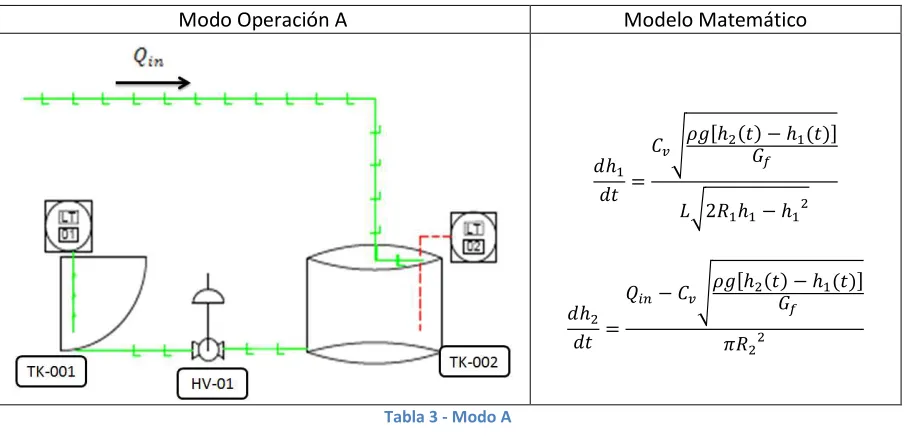
MODO OPERACIÓN A
de área transversal no lineal 001). Este caudal funciona como entrada del tanque no lineal (TK-001) pero tiene la característica que depende de la salida del tanque cilíndrico (TK-002), además en la medida que el nivel en el tanque no lineal aumente la salida del tanque cilíndrico se verá afectada por el cambio de la presión diferencial en los extremos de la válvula.
Modo Operación A Modelo Matemático
√
√
√
Tabla 3 - Modo A
1.3.2.
MODO OPERACIÓN B
En este modo de operación se tiene un sistema de tanques interactuantes, en el cual el caudal proveniente de la bomba centrifuga llega directamente al orificio de entrada del tanque no lineal (TK-001), generando un caudal de salida a través de una tubería y una válvula que servirá como disturbio HV 01. Este caudal empieza a llenar el tanque cilíndrico a través de un orificio ubicado en la parte inferior de este tanque. A medida que el nivel en el tanque cilíndrico aumente la salida del tanque no lineal se verá afectada por el cambio de la presión diferencial en los extremos de la válvula. En la Tabla 4 se observa la circulación del caudal a través del sistema y la interacción de los tanques TK-001 y TK-002.
Modo Operación B Modelo Matemático
√
√
√
[image:19.612.82.536.149.369.2]
2.
MODELADO DE UN SISTEMA NO LINEAL COMO UN SISTEMA
DINAMICO HIBRIDO
En los modos de operación del sistema de tanques se puede observar un comportamiento no lineal, que generalmente se aproxima a una dinámica lineal, este modelo lineal por lo general no es capaz de describir con precisión la dinámica real del sistema. Para mejorar la precisión del modelo se utilizan técnicas de identificación de sistemas no lineales. Este capítulo se centra en la identificación de un sistema no lineal como un modelo exógeno auto regresivo a trozos (PWARX) que se obtiene con datos adquiridos del sistema (entradas y salidas pasadas). Estos modelos representan la estructura de una caja negra con la que prácticamente se puede describir cualquier dinámica no lineal y dadas sus características pertenecen a una clase de los SDH (Sistemas Dinámicos Híbridos) [18]. La metodología que se utilizará para identificar el modelo PWARX que describa la dinámica del sistema de tanques interactuantes de la Figura 1 en sus diferentes modo de operación se basa en el método propuesto en [19].
El proceso de identificación comprende los siguientes pasos:
1. Obtención de datos entradas – salidas. Se debe excitar el sistema mediante la aplicación de una señal de entrada y registrar la evolución de sus entradas y salidas durante un intervalo de tiempo.
2. Identificación modelo PWARX. Este paso consiste en establecer el límite del error δ en determinar el orden para dicho modelo, es decir el número de entradas y salidas que se tendrán en cuenta para la identificación de cada uno de los modelos PWA. Conocidos estos valores se procede a estimar los parámetros a través de los algoritmos propuestos en [19].
3. Validación del modelo. Consiste en determinar si el modelo obtenido satisface el grado de exactitud requerido para la aplicación deseada, que en este caso el control de nivel de los tanques.
2.1.
OBTENCIÓN DE LOS DATOS
El primer paso dentro del proceso de identificación es realizar un experimento sobre el sistema para obtener los datos de entrada-salida que servirán de base para la obtención del modelo final. Para que el proceso de identificación sea satisfactorio, es necesario que los datos obtenidos contengan la mayor información posible del sistema. Esto implica un diseño cuidadoso del experimento para la adquisición de datos, identificando las señales que deben ser medidas, el periodo de muestreo a utilizar, el tipo de entrada más adecuada, y el número de datos a almacenar.
2.1.1.
ELECCIÓN DE LAS SEÑALES A MEDIR
2.1.2.
ELECCIÓN DEL TIPO DE ENTRADAS
Las entradas al sistema deben ser cuidadosamente elegidas de forma que los datos recogidos proporcionen toda la información posible sobre el sistema. Se debe tener en cuenta los siguientes aspectos:
La señal de entrada debe contener el mayor número de frecuencias posibles. Por ejemplo, una señal sinusoidal pura no es adecuada en un experimento de identificación, puesto que sólo se obtendrá la respuesta del sistema para la frecuencia de dicha señal. Por el contrario, las señales escalonadas (con cambios bruscos) son muy utilizadas, puesto que contienen un espectro suficientemente amplio de frecuencias.
Para sistemas no lineales, los niveles de la entrada a utilizar son todos los posibles valores que se pueden obtener en todo el rango de variación permitido. En este tipo de sistemas se suelen utilizar señales con una duración de , donde es el tiempo de establecimiento del sistema [20].
2.1.3.
ELECCIÓN DEL PERIODO DE MUESTREO
La elección del periodo de muestreo está directamente relacionada con las constantes de tiempo del sistema, y tiene una influencia decisiva en el experimento de identificación. Un periodo de muestreo muy pequeño puede llevar a la obtención de datos redundantes, que no aportan información sobre el sistema, mientras que un periodo de muestreo demasiado grande provoca grandes dificultades a la hora de identificar la dinámica del sistema.
2.2.
IDENTIFICACIÓN MODELO PWARX
Considerando un modelo PWARX como
(1)
(2)
Donde es la entrada del sistema, es la salida y es el error. Por lo tanto el sistema tiene única salida, y única entrada. es el vector de regresión que depende únicamente de valores pasados de la salida y de valores pasados de las entradas del sistema. Por lo tanto tiene componentes. es un campo vectorial a trozos de la forma:
{ ̃
̃
̃
̃ ̃
̃
(3)
Donde es el número de submodelos ̃ , ,
parámetros y las regiones de operación para cada submodelo representadas por
, donde es el numero de submodelos, tales que cumplan la condición.
|| || (4)
Hipótesis 1: El orden de cada submodelo ARX es definido a priori ( ).
Basados en el algoritmo [19] se busca desarrollar una metodología que permita encontrar un modelo PWARX que describa la dinámica del sistema de tanques.
2.2.1.
ALGORITMOS
El procedimiento consiste básicamente en una clasificación inicial, un refinamiento y una estimación de la región de operación. Se denomina clasificación a la asignación de un dato a un submodelo . El Algoritmo 1 que se presenta en [19], es la base con la que se determina el número inicial de submodelos. Los algoritmos 2, 3 y 4 corrigen errores en la identificación, dando como resultados los parámetros óptimos . Para estimar la región de operación de cada submodelo se utiliza un algoritmo de clustering como support vector machine [21] o programación lineal robusta [22].
2.2.1.1.
CLASIFICACIÓN INICIAL
El Algoritmo 1 consiste en encontrar los datos ( ) que verifiquen (4), tal que contenga el menor número posible de submodelos. Esto significa que se debe buscar los parámetros que cumplan la desigualdad (4) para el mayor número de datos. Estos datos se retiran entonces de proceso de clasificación y se repite nuevamente la búsqueda del parámetro con los datos restantes. El proceso se repite hasta que todos los datos se encuentren clasificados. Al final de este procedimiento se retorna un número de submodelos iniciales , el conjunto de datos a los que pertenece cada submodelo y los parámetros para cada submodelo.
Algoritmo 1: Clasificación De Datos
Entradas : Datos
Salidas: Numero inicial de submodelos , conjunto de datos que pertenecen a cada submodelo y parámetros para cada submodelo.
Dado y un contador
Mientras| | hacer
Definir el conjunto ‖ ̃‖
Buscar el vector con el algoritmo de optimización MAX FS [19] para los puntos
para hasta
Definir el conjunto
‖ ̃‖ ;
Si | | | |
;
Definir ‖ ̃‖ ; ;
2.2.1.2.
REFINAMIENTO
Una vez obtenido submodelos a través del algoritmo 1, se plantea la siguiente hipótesis
Hipótesis 2: es el número deseado de submodelos que conformaran el modelo PWARX y es conocido.
Esta parte de la identificación consiste en reducir el número de submodelos a . Los puntos que no cumplen con la condición (4) para un modelo en particular
se agrupan en un nuevo conjunto
⋃
(5)
Dado que el objetivo es reducir el número de submodelos a , el factor de error se incrementa por un factor de Por lo tanto se tiene un nuevo conjunto de desigualdades definido como
{ ‖ ̃‖ } (6)
Los puntos que aun con el incremento en el error no satisfacen (6) en ninguno de los submodelos deseados se agrupan en .El conjunto se usa para encontrar los subconjuntos
representa el conjunto de puntos que pertenece únicamente a un submodelo
.
(
⋃
)
(7)
representa el conjunto de puntos que pertenecen a más de un submodelo .
(
⋃
)
(8)
El conjunto de puntos son aquellos puntos que pertenecen a más de submodelo, la unión de todos estos subconjuntos se agrupan para formar el conjunto
⋃
Este conjunto contiene los datos que deben ser clasificados una vez más. Estos se clasifican por medio del algoritmo c-neareast point basado en el criterio de la distancia euclidiana [23]. El algoritmo consiste en tomar los puntos más cercanos al punto y dependiendo del submodelo que se encuentre más cercano al punto se toma la decisión para clasificarlo. Si todos los puntos cercanos pertenecen al mismo submodelo la decisión es trivial, pero si hay dos submodelos con el mismo número de puntos cercanos entre los puntos , el es asignado al submodelo con la distancia media más baja. Este punto se agrega a y se elimina de Con el conjunto se encuentran los valores óptimos para los parámetros utilizando el algoritmo de optimización MIN PFS [19] . Este procedimiento se realiza con el algoritmo 2, con el que se obtienen los conjuntos y Con el objetivo de obtener mayor precisión el algoritmo 3 permite cambiar la dimensión de cada submodelo . Finalmente el Algoritmo 4, prueba los datos adquiridos con los parámetros y con el nuevo límite de error . Esto implica que el algoritmo 2 se utiliza nuevamente, con lo que se corre el riesgo que | | (puntos que aún no han sido clasificados). Entonces el modelo correspondiente para un punto se encuentra por medio de:
‖ ̃ ‖ (10)
Algoritmo 2: Refinamiento, Parte 1
Entradas: Datos , el conjunto , el numero deseado de submodelos , el parámetro , el conjunto de parámetros y el factor .
Salidas: Conjunto de datos que no pertenecen a ningún submodelos y el conjunto de datos que pertenecen a más de un submodelo.
Dado ⋃
para hasta
Definir ‖ ̃‖ ;
‖ ̃‖ indicado en (7);
para hasta
Definir indicado en (8) Definir indicado en (9) Definir indicado en (10)
⋃
Utilizar el algoritmo c-nearest point con el parámetro para cada punto para clasificarlo dentro de un submodelo
. El punto se agrega al conjunto y a la vez se
elimina de .
Algoritmo 2
Algoritmo 3: Refinamiento, Parte 2
Entradas : Datos , conjunto , numero de submodelos
Salidas: Conjunto de parámetros .
para hasta
Para cada uno de los puntos de encontrar los valores óptimos con el algoritmo de optimización MAX FS [19].
Algoritmo 3 Algoritmo 4: Refinamiento, Parte 3
Entradas : Datos , los conjuntos , y , numero de submodelos , una constante y el parámetro
Salidas: modificado
Usando el Algoritmo de optimización MAX FS [19] con los parámetros y el nuevo límite del error como entrada
Si | | entonces
para para
{
‖ ̃ ‖ }
=
Algoritmo 4
2.2.1.3.
ESTIMACIÓN DE LA REGIÓN DE OPERACION
que representa a los puntos de muestra en el espacio, separándolos en clases por un espacio lo más amplio posible. Este busca superficies en un espacio que separe de forma óptima los puntos de una clase de la otra. Estas superficies pueden ser utilizadas para problemas de clasificación. Para mayor información ver [24].
2.3.
VALIDACIÓN DEL MODELO
Un método para validar el modelo identificado utilizado es el FIT, con el que podemos medir que tan buena es la identificación respecto al sistema real. Este se encuentra definido por:
‖ ̂ ‖‖ ̅‖ (11)
3.
CONTROL PARA SISTEMAS DINAMICOS HIBRIDOS
3.1.
ESTABILIDAD EN LOS SISTEMAS DINAMICOS HIBRIDOS
Los principales problemas en la estabilidad de los Sistemas Dinámicos Híbridos son: Encontrar condiciones de estabilidad tal que el sistema hibrido sea estable
Dado una ley de conmutación, determinar si el Sistema Dinámico Hibrido es estable
Establecer una ley de conmutación que haga al sistema Dinámico Hibrido estable
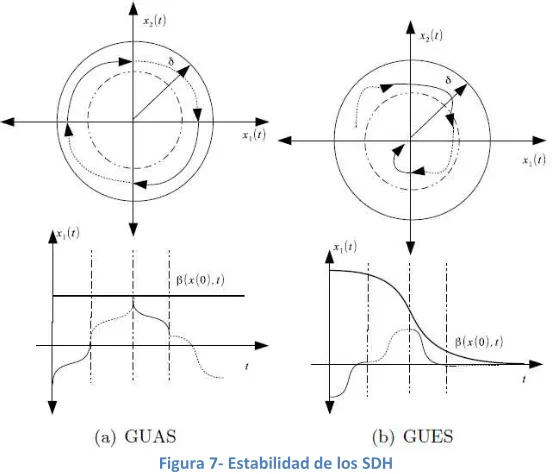
Un sistema conmutado es global uniforme asintóticamente estable (GUAS). Si existe una constante positiva y una función tal que para la secuencia , donde es la regla de conmutación, con
[image:26.612.168.444.325.562.2]se cumpla.
| | ‖ ‖ (12)
Si la función es de la forma . Para y satisface la ecuación (14), el sistema es conocido como global uniforme exponencialmente estable (GUES). [25]
Figura 7- Estabilidad de los SDH
La estabilidad para los sistemas conmutados puede ser estudiada desde dos perspectivas. Independiente de las reglas de conmutación como es el caso de la función común de Lyapunov, o dependiente de las reglas de conmutación como es el caso de la función múltiple de Lyapunov. El método de Lyapunov tiene una definición para los sistemas no lineales como se muestra en [25], [26]. Dado un sistema como:
Donde , describe la dinámica del sistema. La estabilidad del sistema hibrido puede ser estudiada con la ayuda de una función .
3.1.1.
FUNCION MULTIPLE DE LYAPUNOV
La estabilidad en los SDH puede ser estudiada a través de una función de Lyapunov definida a trozos que cumpla ciertas características. Esta función es el conjunto de funciones continuas definidas a trozos que concatenadas conforman una simple función de Lyapunov. Para un sistema lineal e invariante en el tiempo, el conjunto de funciones de Lyapunov se define como:
(14)
La ecuación (14) tiene que cumplir con las siguientes condiciones:
es una función definida positiva
Figura 8 - Estabilidad de un sistema a través de funciones múltiples de Lyapunov. Numero de sistemas 2. La línea continua representa el sistema activo en el instante de tiempo .
La figura anterior muestra un SDH estable. La estabilidad del sistema se comprueba con una función de Lyapunov definida como (14), en donde se observa que esta es descendiente para cualquier instante de tiempo el sistema conmuta de acuerdo a la secuencia [26] Para el caso de sistemas lineales e invariantes en el tiempo se obtiene el siguiente resultado [25]:
Teorema 1: Un sistema SDH es GUES para una secuencia arbitraria si y solo si la siguientes desigualdades se cumple para una matriz definida positiva :
Y para el caso de sistemas lineales en tiempo discreto la desigualdad es igual a:
3.2.
DISEÑO DE LA LEY DE CONTROL
tanques dada una referencia. La técnica de control a estudiar en este proyecto es una realimentación de estados que consiste en buscar una función de Lyapunov que garantice la estabilidad asintótica de un sistema conmutado.
3.2.1.
FORMULACIÓN DEL PROBLEMA
El problema consiste en diseñar un controlador que garantice la estabilidad de (13) independiente de la manera de conmutar. La técnica de control que se propone es una realimentación de estados
conmutada de la forma , obteniendo un sistema en lazo cerrado de la forma
(15)
Hipótesis 3: Todos los estados son medibles.
Como es bien sabido una realimentación de estados tiene un error en estado estacionario significativo. Por lo tanto con el fin de eliminar este error, se agrega un integrador dentro del lazo de control. Una forma de introducir este integrador en el modelo matemático, es introduciendo un nuevo vector de estado, que integre la diferencia entre la referencia del sistema y el vector de salida como se observa en la Figura 7.
Figura 9 – Lazo de control para el SDH
La representación en variables de estado para el lazo de control que se muestra en la Figura 9 está dado por
[
]=[ ] [ ] [ ] [ ]
Entonces las nuevas matrices que describen al sistema son
̂ [ ] ̂ [ ] ̂ (16)
La ley de control para el sistema es de la forma ̂ , obteniendo un nuevo sistema
en lazo cerrado
3.2.2.
CONTROL POR ESTABILIZACIÓN
Considerando un sistema conmutado de la forma , con matrices simétricas definidas positivas. Tal que
y
(18)
El diseño de la ley de control conmutado se reduce al diseño de ganancias de realimentación que garanticen la estabilidad del sistema en lazo cerrado. Los siguientes teoremas muestran una condición suficiente basada en funciones múltiples de Lyapunov con la que se puede estabilizar un
sistema conmutado usando una realimentación de estados .
Teorema 2: [25]. Si existen matrices simétricas , y
[ ( ̂ ̂ ̂)
̂ ̂ ̂ ] ̂ ̂ (19)
Entonces la ganancia que estabiliza el sistema es ̂
Teorema 3: [25].Si existen matrices simétricas , matrices , y tal que
̂ ̂ ̂
̂ ̂ ̂ ̂ ̂ (20)
4.
IDENTIFICACION DEL SISTEMA DE TANQUES EN MODO A COMO
UN SISTEMA DINAMICO HIBRIDO.
Figura 10-Sistema de tanques en modo de operación A
4.1.
VALIDACIÓN DEL MODELO DINÁMICO
El modo de operación A se encuentra regido por las siguientes ecuaciones
√
√
( √ ) √
√
√
(21)
Donde es el nivel de TK-01, es el nivel de TK-02, es la gravedad específica, el coeficiente de flujo de la válvula que se encuentra entre los tanques. En el diseño previo para la construcción del sistema de tanques [26] se estableció que el valor de estos parámetros son iguales a:
Parámetro Unidades Valor
Rho Kg/m3 1000
Gf 1
Cv m^3/s 0.0860
R1 m 0,6
L m 0,7
R2 m 0,3
[image:31.612.212.401.68.165.2]Ao m 2,85E-04
Tabla 5 - Parámetros Iniciales del sistema de tanques
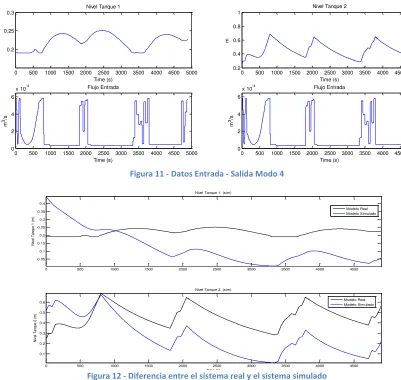
[image:31.612.99.500.268.648.2]El objetivo de esta validación es el de corregir y estimar los valores de estos parámetros a través del método de la caja gris de Matlab, y de esta manera obtener el modelo dinámico que describe el comportamiento del sistema real. El primer paso a realizar, es un experimento en el que se excite al sistema y se almacenen los datos de entrada - salidas (Flujo de entrada – Nivel TAK 1 - Nivel TAK 2), con el objetivo de comparar los valores del modelo simulado y los valores experimentales del sistema.
Figura 11 - Datos Entrada - Salida Modo 4
Figura 12 - Diferencia entre el sistema real y el sistema simulado
Con los datos almacenados se procede a estimar los parámetros del modelo y así obtener un modelo dinámico que se acomode al comportamiento real del sistema. Los parámetros obtenidos son:
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 0.2
0.25 0.3
Time (s)
m
Nivel Tanque 1
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 0
2 4 6
x 10-4 Flujo Entrada
Time (s)
m
3/s
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 0.2 0.4 0.6 0.8 1 Time (s) m
Nivel Tanque 2
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 0
2 4 6
x 10-4 Flujo Entrada
Time (s)
m
3/s
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Nivel Tanque 1. (sim)
N iv el T an qu e 1 (m )
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0.1 0.2 0.3 0.4 0.5 0.6
Nivel Tanque 2. (sim)
Parámetro Unidades Valor
Rho Kg/m3 1000
g(Gravedad) m/s2 9.80613
Gf 1.04847
Cv m^3/s 2.41349E-6
R1 m 0,6
Z m 0,7
R2 m 0,3
Aout m 4.92971E-5
Tabla 6 - Parámetros Estimados
Con la estimación de los nuevos parámetros de la ecuación dinámica del sistema (23) se puede observar la similitud entre el modelo simulado y el modelo real. Este modelo servirá de herramienta para el proceso de identificación del sistema como un SDH (Sistema Dinámico Hibrido).
Figura 13 - Sistema real y Simulado con los parámetros estimados
4.1.1.
VÁLVULA DE CONTROL CV 01
(a) (b)
Figura 14 - Válvula de Control
Como se explico en el capitulo 1 el sistema de tanques cuenta con una válvula de control, por medio de esta se quiere controlar el caudal de entrada a los tanques con el fin de mantener el
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0.19 0.2 0.21 0.22 0.23 0.24 0.25
Nivel Tanque 1. (sim)
N
iv
el
T
an
qu
e
1
(m
)
0 500 1000 1500 2000 2500 3000 3500 4000 4500
0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65
Nivel Tanque 2. (sim)
Time (s)
N
iv
el
T
an
qu
e
2
(m
)
Modelo Real Modelo Estimado
nivel de estos alrededor de una referencia. La válvula CV 01 es una válvula tipo globo ampliamente utilizada para el control de caudal. El control de caudal está determinado por el levantamiento del tapón de la válvula. Cuando el tapón de la válvula está en contacto firme con el asiento, la válvula está cerrada. Cuando el tapón de la válvula está alejado del asiento, la válvula está abierta. Debido a que la vía de circulación en esta válvula es en forma de 'S', la caída de presión es considerable comparándola con otros tipos de válvulas.
4.1.2.
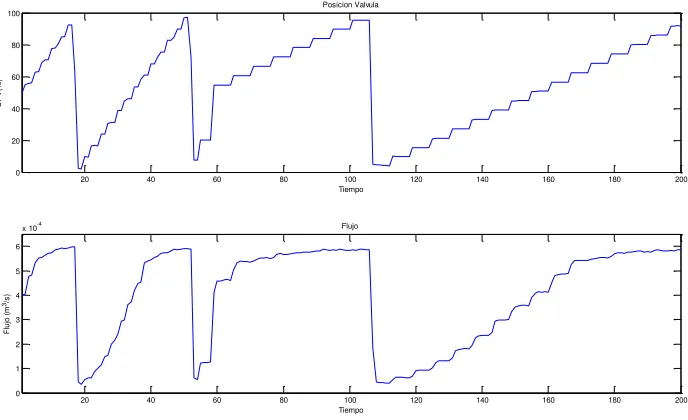
CARACTERÍSTICA INSTALADA DE LA VÁLVULA CV 01
[image:33.612.137.481.264.474.2]La característica instaladade la válvula describe la variación del flujo a través de esta, respecto a su posición, en una instalación dada. Con el fin de conocer la característica instalada de la válvula se realizó una serie de experimentos que consisten en incrementar el set point de la válvula de manera gradual y esperar que el flujo se estabilice.
Figura 15 - Experimentos en la válvula de control
Los datos adquiridos en la pruebas permiten reconstruir la característica instalada como se observar en la Figura 14. Como era de esperarse esta presenta un comportamiento no lineal, con una saturación de flujo en los porcentajes mayores de apertura.
Para encontrar una relación entre el porcentaje de apertura de la válvula y el flujo de salida se realiza un ajuste a través de un polinomio (24).
[
]
[
]
| (22)
20 40 60 80 100 120 140 160 180 200
0 20 40 60 80 100
O
P
V
(%
)
Tiempo Posicion Valvula
20 40 60 80 100 120 140 160 180 200
0 1 2 3 4 5 6
x 10-4
F
lu
jo
(
m
3/s
)
Figura 16 - Característica instalada de la válvula de control
4.2.
OBTENCIÓN DE LOS DATOS
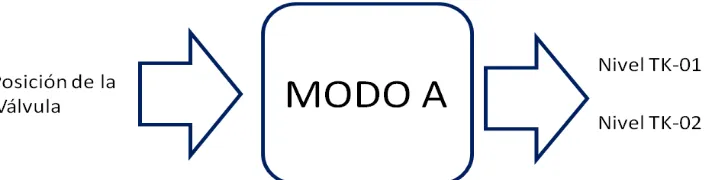
Conocida la característica de la válvula de control y la dinámica del sistema de tanques en el modo A se puede observar con gran detalle la no linealidad de estos, por lo tanto se plantea identificar como un Sistema Dinámico Hibrido (SDH) al sistema que se observa en la Figura 17, a través del método explicado en el Capitulo 3. Donde las señales de salida serán los niveles de los TK -01 y TK-02, y la señal de entrada es la posición de la válvula CV-01.
Figura 17-Modelo a Identificar. Entradas y Salidas
4.2.1.
SEÑALES A MEDIR
Señal de entrada: Porcentaje de apertura de la válvula Señales de salida: Nivel TK-01 y Nivel TK-02.
4.2.2.
TIPO DE ENTRADAS
Las señales de entrada son las encargadas de excitar al sistema y entregar la mayor información posible de este. Los tipos de entrada a utilizar en esta identificación son todos los posibles valores que se pueden obtener en todo el rango de variación permitido, que en este caso es entre el 0% -
0 10 20 30 40 50 60 70 80 90 100
0 1 2 3 4 5 6 7 8x 10
-4
F
lu
jo
(
m
3/s
)
[image:34.612.138.492.459.549.2]100% de apertura de la válvula. La duración de la señales será variable debido a la no linealidad del sistema. En la Figura 18 se muestran los datos experimentales obtenidos
Figura 18- Adquisición de datos experimentales del sistema de tanques en el modo A
4.2.3.
TIEMPO DE MUESTREO
El tiempo de muestreo seleccionado es de , este se seleccionó teniendo en cuenta que al excitar al sistema con el flujo máximo, el tiempo en el que alcanza el nivel máximo el tanque TK-02 es de 320s y al utilizar flujos intermedios el tiempo de establecimiento del sistemas está en el orden de los 20000s. Por lo tanto se garantiza que con este tiempo de muestreo se obtendrá la información suficiente para la identificación del sistema.
4.3.
IDENTIFICACIÓN MODELO PWARX
Realizado el experimento de adquisición de datos se procede a identificar un modelo PWARX para cada salida del sistema, es decir para el nivel de TK-01 y de TK -02.
4.3.1.
MODELO PWARX PARA EL TK-01
Hipótesis 4: El orden del sistema debe ser seleccionado a priori, por lo tanto , con
. Obteniendo que el vector de regresión es igual a
̃ . Donde es el nivel del TK-01, es el nivel del TK-02 y es el
porcentaje de apertura en la válvula.
0.5 1 1.5 2 2.5
x 104 0
0.2 0.4
N
iv
e
l
T
A
K
1
0.5 1 1.5 2 2.5
x 104 0
0.2 0.4 0.6
N
iv
e
l
T
A
K
2
0.5 1 1.5 2 2.5
x 104 0
50 100
P
o
s
ic
io
n
V
a
lv
u
la
4.3.1.1.
ALGORITMOS
Figura 19-Datos experimentales para la identificación de TK-01
Los parámetros de entrada para el algoritmo 1 son , , parámetros que son tenidos en cuenta para solucionar el problema de optimización en el Algoritmo 1 . La selección de se hace teniendo en cuenta el ruido presente en las mediciones de los sensores, de donde se obtiene que la varianza máxima del ruido en estos instrumentos es de presente en el posicionar de la válvula. [19] Aconseja que la relación entre señal a ruido sea de 10:1 por lo tanto en valor escogido es de .
Figura 20-Identificación inicial del TK-01, donde cada marca representa un submodelo
En el algoritmo 2 los parámetros de entradas seleccionados son , factor con el que se aumenta en límite del error, que es el número deseado de submodelos, c = 5 con el que se le indica al algoritmo 2 la cantidad de puntos cercanos que debe tener en cuenta para el proceso reclasificación.Al final de la identificación obtenemos los parámetros óptimos, observados en la Tabla 7.
0.9380 0.0454 1.7594e-5
-0.0050
0.9354 0.0461 2.9836e-6
-0.0056
0.2 0.25
0.3 0.35 0.4
0 20 40 60 80 1000.2
0.3 0.4 0.5 0.6 0.7
y1[k-1] Datos Identificacion TAK 1
u[k-1]
y2
[k
-1
]
0.2 0.25
0.3 0.35 0.4
0 20 40 60 80 1000.2
0.3 0.4 0.5 0.6 0.7
y1[k-1] u[k-1]
y2
[k
-1
]
Tabla 7 - Vector de parámetros óptimos modelo para el modelo PWARX de TK-01
Figura 21 - Identificación final de TK-01, donde cada símbolo representa un submodelo.
4.3.1.2.
ESTIMACIÓN DE LA REGIÓN DE OPERACION
En la Figura 22 se observan los submodelos y las regiones de operación obtenidas para cada submodelo son:
Donde
Por lo tanto las reglas de conmutación son iguales a:
Si
̃
Si no
̃
Figura 22 - Regiones de operación para el sistema PWARX de TK-01
4.3.2.
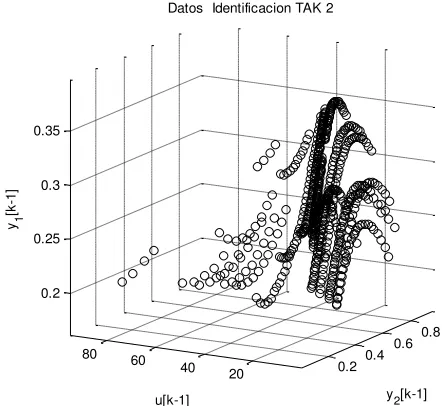
MODELO PWARX PARA EL TK-02
Ahora se procede a identificar un modelo PWARX para TK-02, la Figura 23 muestra los datos experimentales que se utilizaran para la identificación.
0.1 0.2
0.3 0.4
0.5
0 20 40 60 80 100 0.2 0.3 0.4 0.5 0.6 0.7
y1[k-1]
u[k-1]
y2
[k
-1
]
Modelo 1 Modelo 2
0.180 0.2 0.22 0.24 0.26 0.28 0.3 0.32 0.34 0.36 0.38
10 20 30 40 50 60 70 80 90 100
y1[k-1]
u
[k
-1
]
Figura 23 – Datos experimentales para la identificación de TK-02
Hipótesis 5: El orden del sistema debe ser seleccionado a priori, por lo tanto , con
. Obteniendo que el vector de regresión es igual a
̃ . Donde es el nivel del TK-01, es el nivel del TK-02 y es la
posición de la válvula.
4.3.2.1.
ALGORITMOS
De manera similar que se hizo para la identificación del tanque TK-01 se tienen que escoger los parámetros de entrada para el algoritmo 1, estos parámetros necesariamente no deben ser iguales a los utilizados en TK-01. Los valores seleccionados son , y
, dando como resultado una identificación preliminar como se observa en la siguiente Figura 24.
Figura 24 - Identificación final de TK-01, donde cada símbolo representa un submodelo.
Para el algoritmo 2 los parámetros de entradas seleccionados son , factor con el que se aumenta en límite del error, que es el número deseado de submodelos, c = 5 con el que se le indica al algoritmo 2 la cantidad de puntos cercanos que debe tener en cuenta para el proceso
0.2 0.4
0.6 0.8
20 40 60 80 0.2 0.25 0.3 0.35
y2[k-1]
Datos Identificacion TAK 2
u[k-1]
y 1
[k
-1
]
0.2 0.4
0.6 0.8
1
0 20 40 60 80 100
0.2 0.25 0.3 0.35 0.4
y1[k-1]
u[k-1]
y2
[k
-1
]
reclasificación. Al final de la identificación obtenemos los parámetros óptimos, estos son observados en la Tabla 8.
Figura 25- Identificación final de TK-02, donde cada símbolo representa un submodelo, para un total de 2 submodelos.
4.3.2.2.
ESTIMACIÓN DE LA REGIÓN
En la siguiente figura se observan los submodelos y las regiones de operación obtenidas para cada submodelo son:
Figura 26 - Regiones de operación del modelo PWARX de TK-02
Donde
Por lo tanto las reglas de conmutación son iguales a:
Si
̃
Si no
̃ 0.2
0.4 0.6
0.8 1
0 20 40 60 80 0.2 0.25 0.3 0.35 0.4
y1[k-1] u[k-1]
y2
[k
-1
]
0.250 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7
10 20 30 40 50 60 70
y1[k-1]
u
[k
-1
]
Modelo 1 Modelo 2
0.9617 0.0362 0.0016 -0.0295
[image:39.612.211.404.205.345.2]0.9528 0.0460 0.0004 -0.0087
[image:39.612.89.524.452.679.2]4.4.
VALIDACIÓN DEL MODELO PWARX
4.4.1.
FIT
Las siguientes graficas comparan la señal real y la estimada con el modelo PWARX. También se observa la conmutación entre los submodelos que componen al modelo PWARX. Los valores del FIT representan que el modelo PWARX sigue a la salida real del sistema en este porcentaje, estos valores son lo suficientemente altos para una implementación de control en el sistema que se desea realizar más adelante.
Figura 27-Modelo PWARX TK-01, FIT=88.7398%. Sistema Real en rojo, Modelo PWARX en negro
Figura 28-Modelo PWARX TK-02, FIT=83.7398%. Sistema Real en rojo, Modelo PWARX en negro
Figura 29-Modelo PWARX TK-01, FIT=94.3316%. Sistema Real en rojo, Modelo PWARX en negro
Figura 30-Modelo PWARX TK-02, FIT=87.1322%. Sistema Real en rojo, Modelo PWARX en negro
0 20 40 60 80 100 120 140
0 20 40 P o s ic io n V a lv u la Tiempo(s) TK-01
0 20 40 60 80 100 120 140
0.2 0.3 0.4 N iv e l T A K 1 Tiempo(s)
0 20 40 60 80 100 120 140
0 1 2 M o d o T K -0 1 Tiempo(s)
0 20 40 60 80 100 120 140
0 20 40 P o s ic io n V a lv u la Tiempo(s) TK-02
0 20 40 60 80 100 120 140
0 0.5 1 N iv e l T A K 2 Tiempo(s)
0 20 40 60 80 100 120 140
1 1.5 2 M o d o T K -0 2 Tiempo(s)
0 20 40 60 80 100 120 140
10 20 30 P o s ic io n V a lv u la Tiempo(s) TK-01
0 20 40 60 80 100 120 140
0.2 0.3 0.4 N iv e l T A K 1 Tiempo(s)
0 20 40 60 80 100 120 140
0 1 2 M o d o T K -0 1 Tiempo(s)
0 20 40 60 80 100 120 140
10 20 30 P o s ic io n V a lv u la Tiempo(s) TK-02
0 20 40 60 80 100 120 140
0.4 0.6 0.8 N iv e l T A K 2 Tiempo(s)
0 20 40 60 80 100 120 140