Identificación del error y la calidad de los productos empleando diferentes software mediante el uso de la aeronave no tripulada UX5
70
0
0
Texto completo
(2) IDENTIFICACIÓN DEL ERROR Y LA CALIDAD DE LOS PRODUCTOS EMPLEANDO DIFERENTES SOFTWARE MEDIANTE EL USO DE LA AERONAVE NO TRIPULADA UX5. CARLOS ALBERTO GUERRA BERNAL. Código 20082032023. JHONATAN AMÓRTEGUI GÓMEZ. Código 20092032002. Proyecto de Grado presentado como requisito parcial para optar al Grado de INGENIERO TOPOGRÁFICO bajo la dirección de:. WILLIAM BARRAGAN ZAQUE Ing. Catastral y Geodesta. Esp. SIG. Mag. Fotogrametría y Geoinformatica Director Interno. DARWIN GONZALO BAQUERO HERNÁNDEZ Ing. Topográfico Director Externo. UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DEL MEDIO AMBIENTE Y RECURSOS NATURALES INGENIERÍA TOPOGRÁFICA BOGOTÁ D.C. 2017.
(3) Contenido INTRODUCCIÓN .................................................................................................. 12 1.. PLANTEAMIENTO DEL PROBLEMA ............................................................ 14. 2.. JUSTIFICACIÓN DEL PROYECTO ............................................................... 15. 3.. OBJETIVOS ................................................................................................... 17 3.1. Objetivo General ...................................................................................... 17 3.1.1. 4.. Objetivos Específicos ............................................................................ 17. MARCO TÉORICO ........................................................................................ 18 4.1. Topografía ................................................................................................ 18 4.2. Cartografía ............................................................................................... 18 4.3. Fotogrametría ........................................................................................... 19 4.4. Modelo digital del terreno, DTM o MDT.................................................... 20 4.5. Sistema de posicionamiento global, GPS ................................................ 21 4.6. Aeronave remotamente tripulada UX5 ..................................................... 21. 5.. METODOLOGÍA ............................................................................................ 23 5.1. Diagrama de actividades .......................................................................... 23 5.2. Conceptualización .................................................................................... 23 5.3. Descripción municipio .............................................................................. 24 5.4. Recopilación información primaria ........................................................... 26 5.5. Recopilación información secundaria ....................................................... 26 5.6. Formatos de campo ................................................................................. 28 5.7. Levantamiento puntos de control ............................................................. 30 5.8. Realización del vuelo ............................................................................... 30 5.9. Procesamiento de la información ............................................................. 30 5.10.. UAS Master........................................................................................... 31. 5.11.. Fotocontrol ............................................................................................ 34. 5.12.. Ajuste .................................................................................................... 37. 5.13.. DSM ...................................................................................................... 37.
(4) 5.14.. Ortofotomosaico.................................................................................... 38. 5.15.. Generación De Tablas .......................................................................... 38. 5.16.. Agisoft ................................................................................................... 44. 5.17.. Pix4Dmapper ........................................................................................ 45. 6. ANÁLISIS DE RESULTADOS ........................................................................... 46 7. CONCLUSIONES ............................................................................................. 63 8. ANEXOS ........................................................................................................... 65 Bibliografía ............................................................................................................ 70.
(5) LISTA DE FIGURAS Figura 1. Diagrama de Flujo .................................................................................. 23 Figura 2. Municipio de Cundinamarca ................................................................... 24 Figura 3. Municipio de Chía................................................................................... 25 Figura 4. Área del levantamiento........................................................................... 25 Figura 5. Cartografía de la zona del levantamiento ............................................... 27 Figura 6. Formato, descripción del punto .............................................................. 28 Figura 7. Formato, datos del GPS ......................................................................... 29 Figura 8. Configuración, sistema de referencia del UX5. ...................................... 32 Figura 9. Configuración, sistema de referencia del levantamiento. ....................... 32 Figura 10. Especificaciones de la cámara. ............................................................ 33 Figura 11. Configuración, fotos y altura promedio de terreno. .............................. 33 Figura 12. Interfaz inicial con el proyecto cargado ................................................ 34 Figura 13. Punto de control 1 ................................................................................ 35 Figura 14. Punto de control 4 ................................................................................ 35 Figura 15. Punto de control 6 ................................................................................ 35 Figura 16, Punto de control 13 .............................................................................. 35 Figura 17. Punto de control 15 .............................................................................. 35 Figura 18. UAS Measure ....................................................................................... 35 Figura 19. Point List .............................................................................................. 36 Figura 20. Point list, después de la medición de los puntos .................................. 36 Figura 21. Resoluciones de la calidad del proceso ............................................... 37 Figura 22. Ortofoto y shape de puntos. ................................................................. 39 Figura 23. DSM y shape de puntos. ...................................................................... 39 Figura 24. Punto de control 3 ................................................................................ 40 Figura 25. Punto de control 8 ................................................................................ 40 Figura 26. Punto de control 9 ................................................................................ 40 Figura 27. Punto de control 17 .............................................................................. 40.
(6) Figura 28. Punto de control 2 ................................................................................ 41 Figura 29. Punto de control 7 ................................................................................ 41 Figura 30. Punto de control 11 .............................................................................. 41 Figura 31. Punto de control 10 .............................................................................. 41 Figura 32. Punto de control 14 .............................................................................. 41 Figura 33. Punto de control 16 .............................................................................. 41 Figura 34. Diferencia de los errores UAS Master .................................................. 47 Figura 35. Coordenadas Proceso UAS ................................................................. 47 Figura 36. Coordenadas Proceso Agisoft .............................................................. 47 Figura 37. Coordenadas Proceso Pix4D ............................................................... 47 Figura 38. Ortofotomosaico UAS Master ............................................................... 48 Figura 39. DSM UAS Master ................................................................................. 49 Figura 40. Ortofomosaico Agisoft .......................................................................... 50 Figura 41. DSM Agisoft ......................................................................................... 51 Figura 42. Ortofotomosaico Pix4D ........................................................................ 52 Figura 43. DSM Pix4D ........................................................................................... 53 Figura 44. Diferencias de los errores .................................................................... 54 Figura 45. Recorte Mosaico UAS 1 ....................................................................... 55 Figura 46. Recorte Mosaico Pix4D 1 ..................................................................... 55 Figura 47. Recorte Mosaico Agisoft 1 ................................................................... 55 Figura 48. Recorte Mosaico UAS 2 ....................................................................... 56 Figura 49. Recorte Mosaico Pix4D 2 ..................................................................... 56 Figura 50. Recorte Mosaico Agisoft 2 ................................................................... 56 Figura 51. Recorte Mosaico UAS 3 ....................................................................... 57 Figura 52. Recorte Mosaico Pix4D 3 ..................................................................... 57 Figura 53. Recorte Mosaico Agisoft 3 ................................................................... 57 Figura 54. Recorte Mosaico UAS 4 ....................................................................... 58 Figura 55. Recorte Mosaico Pix4D 4 ..................................................................... 58 Figura 56. Recorte Mosaico Agisoft 4 ................................................................... 58 Figura 57. Recorte Mosaico UAS 5 ....................................................................... 59.
(7) Figura 58. Recorte Mosaico Pix4D 5 ..................................................................... 59 Figura 59. Recorte Mosaico Agisoft 5 ................................................................... 59 Figura 60. Recorte DSM UAS ............................................................................... 60 Figura 61. Recorte DSM Pix4D ............................................................................. 60 Figura 62. Recorte DSM Agisoft ............................................................................ 60.
(8) LISTA DE TABLAS Tabla 1. Coordenadas, puntos de control. ............................................................ 31 Tabla 2. Coordenadas puntos, proceso Alfa UX5 ................................................. 42 Tabla 3. Coordenadas puntos, proceso Kappa UX5 ............................................. 42 Tabla 4. Coordenadas puntos, proceso Omega UX5 ............................................ 42 Tabla 5. Diferencia proceso Alfa UX5. .................................................................. 43 Tabla 6. Diferencia proceso Kappa UX5. .............................................................. 43 Tabla 7. Diferencia proceso Omega UX5 .............................................................. 43 Tabla 8. Coordenadas, proceso Omega Agisoft.................................................... 44 Tabla 9.Coordenadas, proceso Omega Pix4D ...................................................... 45 Tabla 10. Diferencia proceso Alfa UX5. ................................................................ 46 Tabla 11. Diferencia proceso Kappa UX5. ............................................................ 46 Tabla 12. Diferencia proceso Omega UX5 ............................................................ 46 Tabla 13. Comparación Puntos de Control ........................................................... 61.
(9) LISTA DE ANEXOS. Anexo 1. Ubicación del punto base. ...................................................................... 65 Anexo 2. Información del punto base .................................................................... 65 Anexo 3. Formatos GPS 1, 2, 3 y 4 ....................................................................... 66 Anexo 4. Formatos GPS 6, 7, 8 y 9 ....................................................................... 67 Anexo 5. Formatos GPS 10, 11, 12 y 13 ............................................................... 68 Anexo 6. Formatos GPS 14, 15, 16 y 17 ............................................................... 69.
(10) RESUMEN. Con el gran avance que tiene la tecnología, cada vez se observan nuevos métodos para realizar el trabajo de una forma más eficiente, con la misma precisión con que se desarrolla actualmente y en algunos casos mejorándola. Para realizar este trabajo se implementó el uso de las aeronaves remotamente tripuladas, las cuales permiten desarrollar un levantamiento topográfico obteniendo productos con gran precisión y de alta resolución. Para lograr lo anterior y elaborar el levantamiento de la información, se tuvo que realizar dos fases, una en campo, la cual consistió en realizar el vuelo y levantar los puntos de control y la otra en oficina, donde se procesó toda la información. El trabajo de campo se realizó en una zona ubicada en el departamento de Cundinamarca, cerca al norte de la ciudad de Bogotá, más exactamente en la vía hacia Tunja en la Provincia de Sabana Centro. El levantamiento tuvo un área aproximada de 1.5 kilómetros cuadrados, caracterizada por tener un nivel variable en la altimetría. Una vez que se obtuvo los datos en campo y se procesaron con el software diseñado para la aeronave, se identificó el error que podía tener la información realizando diferentes pruebas de procesamiento, las cuales permitieron determinar que, a mayor cantidad de puntos de control, siempre se evidenciaba una mejora en la disminución del error que se obtenía. Al obtener este resultado y determinar la situación óptima para lograr el mínimo error, se procedió a repetir el proceso en dos software diferentes. Se determinaron las variaciones que estos podían generar en el error y los productos finales, para compararlos con cartografía de la zona levantada por el IGAC1 con métodos convencionales.. 1. IGAC: Instituto Geográfico Agustín Codazzi..
(11) ABSTRACT. Thanks to the great advance of technology, new methods are being observed to perform the work in a more efficient way, with the same precision in which it is currently developed and, in some cases, improving it. To perform this work, the use of remotely operated aircraft was implemented, which allows the development of a topographic survey obtaining products with both high precision and resolution. In order to achieve this and to develop the topographic survey, two phases had to be performed: one in the field, which consisted in performing the flight and lifting the control points: and the other one indoors, where all the information was processed. This fieldwork was carried out in an area located in Cundinamarca, close to northern Bogota, more precisely on the road to Tunja in the province of Sabana Centro. The survey covered an approximate area of 1.5 square kilometers that presented a variable level in altimetry. Once the data were obtained in the field and processed with the software designed for the aircraft, the error rate that the information could have had it was identified by performing different processing tests, which allowed to determine that the greater number of control points, the more improvement in the reduction of the obtained error is shown. Upon obtaining this result and determining the optimal situation to achieve the minimum error, a repetition of the process was done in two different software. The variations that could generate any error in the final products were determined and then compared with the mapping of the zone raised by the IGAC with conventional methods..
(12) INTRODUCCIÓN. En la Topografía como en muchas otras ciencias en la medida en que transcurre el tiempo se van involucrando nuevas tecnologías que hacen perfeccionar los fines deseados. Esto generalmente tiene cierto proceso para conseguir el producto o el resultado esperado, de la misma forma se va involucrando las herramientas que se tiene a disposición, para poder trabajar en pro de una meta específica, de acuerdo con los requerimientos técnicos que deba tener el mencionado producto final. En la Topografía se debe elaborar productos y generar resultados buscando siempre la máxima precisión posible, con la finalidad de ajustar el modelo a la representación de la realidad. Quien trabaja en esta área tiene presente que, evitar el error en el proceso de generar unos resultados de representación en el cien por ciento es poco probable, pero que es su obligación el hacerlo con un criterio en el que se busque precisamente tener el mínimo de error en la calidad. Se debe buscar en el desarrollo del trabajo factores que impliquen el gasto más apropiado o el menor, respecto al tiempo invertido en cada trabajo y a los costos. En esta era se ha permitido ver la inclusión de la tecnología de los drones2 o aeronaves remotamente tripuladas, que tienen múltiples aplicaciones. En este trabajo se relacionará su aporte a la topografía, puntualmente en levantamientos topográficos y cartográficos. Esta herramienta proporciona datos de calidad, los cuales se pueden comparar con una información de referencia para verificar la precisión. Es importante tener en cuenta variables como los costos y tiempos de inversión, los cuales pueden disminuir notablemente respecto de la topografía convencional. Se quiere mostrar en que situaciones de trabajo, el dron puede tener un aporte significativo, al ser una herramienta alternativa la cual permite generar productos de calidad, se puede llegar a tener información muy fiel al terreno. Por eso en este trabajo se analizarán los resultados obtenidos en un levantamiento de información, realizando un vuelo con el dron UX5 de Trimble. Se debe tener en cuenta las características de un levantamiento con topografía convencional, ya que para ajustar la información es necesario tomar puntos de control. Para lograr una. 2. Por definición, un Dron es un vehículo aéreo no tripulado. Esta es una categoría amplia que podría incluir cualquier cosa, desde un avión a control remoto de juguete hasta un avión comercial o de carga sin piloto como también un avión militar de ataque o de vigilancia en cualquier lugar del planeta. http://www.academia.edu/7946946/QU%C3%89_ES_UN_DRONE.
(13) gran precisión, se emplearon equipos GNSS3 en la toma de los puntos de control los cuales se emplearan en el ajuste de la información logrando una mejor calidad. Se busca brindar y dar a conocer otra alternativa para la creación de un producto confiable empleando la tecnología del dron. Teniendo en cuenta además la diferencia de los procedimientos empleando diferentes software para el proceso de los datos, no solo el software UAS Master, el cual es el que maneja Trimble, sino también software similares que permitan tener un mayor acceso a los procesos manteniendo un costo mínimo de inversión o de gastos que genere el proyecto. Es por esta razón que se emplearán software como Agisoft y Pix4D, los cuales brindarán información alternativa en la cual se podrá soportar la calidad del trabajo.. 3 GNSS (Global Navigation Satellite System), es el acrónimo que se refiere al conjunto de tecnologías de sistemas de navegación por satélite que proveen de posicionamiento geoespacial con cobertura global de manera autónoma (Álvarez, 2008)..
(14) 1. PLANTEAMIENTO DEL PROBLEMA. En la realización de los levantamientos topográficos convencionales se encuentran productos y resultados, donde el error difiere respecto al tipo de procedimiento que se realice. Es pertinente tener en cuenta la calidad, el cual está directamente relacionado con la manera en la que se toman los datos, se procesa la información y las herramientas que se emplean, entre otros. Estas variables pueden ser mejoradas para la elaboración y la entrega de un producto final de mayor calidad. La tecnología del vehículo aéreo remotamente tripulado en sus especificaciones y su procedimiento, permite realizar un levantamiento de información el cual cumple con el mejoramiento de la calidad. Al ser de gran importancia entregar los productos con una muy buena precisión y calidad, es necesario procesar la información empleando equipos óptimos los cuales permitan cumplir lo anteriormente mencionado. La ciencia de la topografía debe ir a la vanguardia de la mejor tecnología a disposición, ya que a medida que transcurra el tiempo deberá subir el nivel de los productos de levantamientos topográficos que se generen. La zona en la que se realizó el vuelo, tiene notables cambios en la topografía, permitiendo una mejor comparación de los productos que se obtendrán contra la cartografía que facilito el IGAC, con el fin de tener un punto de referencia de una buena fuente..
(15) 2. JUSTIFICACIÓN DEL PROYECTO. Los levantamientos topográficos actualmente se realizan en su mayor parte de la forma convencional, empleando una estación total, un teodolito, un nivel o un GPS, lo cual permite lograr una gran precisión de los productos que se quieren obtener. Sin embargo, en ocasiones hay zonas que son complicadas de realizar el levantamiento, debido al tipo de terreno o las grandes extensiones que llevan mucho tiempo realizarlo. La implementación de los vehículos aéreos remotamente tripulados o los drones cada vez es mayor para realizar los levantamientos, debido que no hay certificación o una metodología establecida que permita determinar la precisión de los levantamientos que se realizan con estos equipos, es necesario implementar el uso de nuevas tecnologías, pero a su vez también es menester certificar la precisión que tienen. Para este caso se realizarán pruebas para documentar la precisión que tiene el Dron UX5 de Trimble, este puede obtener una muy buena precisión en X y Y, pero en Z o la altura del terreno puede variar dependiendo de las características del terreno, la manera en que se planea el vuelo o de la cantidad de puntos de control que se emplean al momento de ajustar la información. Con base en los resultados de los levantamientos topográficos convencionales y con el uso de una tecnología como la de los vehículos aéreos remotamente tripulados o los drones, este proyecto se caracteriza principalmente por demostrar la precisión que se puede obtener empleándolos, además del ahorro de tiempo y la cobertura del área que se puede abarcar respecto a un levantamiento convencional. Teniendo en cuenta las ventajas que ofrecen los drones, se debe enmarcar un aspecto importante relacionado con la precisión que se puede obtener, debido que la precisión en Z o altura del terreno no siempre es la que se espera, algo que no sucede con la precisión en X y Y. Esta precisión en Z varía dependiendo de la cantidad de puntos de control con los que se realiza en el fotocontrol, se busca determinar cuál es la precisión que se obtiene con cantidades diferentes de puntos de control. Se busca tener una representación gráfica de un terreno determinado y es necesario establecer parámetros óptimos para la utilización de los drones. En este caso específico se determinará cuál es la óptima precisión que se puede obtener, donde una mayor cantidad de puntos de control para referenciar los datos determinará las precisiones que se pueden obtener al momento de realizar el procedimiento. Se justifica el proyecto, por la ventaja en el procedimiento del levantamiento, por el acceso a grandes y complicadas coberturas a levantar, y el mantenimiento de los.
(16) resultados de precisión gracias al uso de esta nueva técnica. Una vez se aclare el aspecto de la coordenada Z o la cota de terreno, se tendrán en cuenta aspectos como el tiempo y los costos invertidos en la toma de información con el dron con el fin que se pueda dar a conocer esta nueva alternativa como una solución viable. Al comparar la información levantada con la suministrada por el IGAC se tendrá un gran punto de referencia el cual permita determinar la calidad de la información..
(17) 3. OBJETIVOS 3.1.. Objetivo General. Identificar la diferencia en la precisión de los productos obtenidos con la aeronave remotamente tripulada UX5, comparados con la cartografía obtenida por el IGAC levantada mediante topografía convencional.. 3.1.1 Objetivos Específicos. •. Obtener la variación de la precisión al realizar el ajuste de la información con una cantidad diferente de puntos de control.. •. Establecer los usos de la información, raster y del modelo digital del terreno obtenidos con el levantamiento realizado con el Dron UX5.. •. Determinar las diferencias del procesamiento de la información y del producto final empleando diferentes software UASMaster, Pix4Dmapper y Agisoft.. •. Mostrar la variación de la precisión de los productos finales obtenidos empleando diferentes software UASMaster, Pix4Dmapper y Agisoft. ..
(18) 4. MARCO TÉORICO. 4.1.. Topografía. La Topografía se ocupa del estudio de los métodos para obtener la representación plana de una parte de la superficie terrestre con todos sus detalles y de la construcción, del conocimiento y del manejo de los instrumentos para ello. (Garcia, 1996). En otra definición la topografía, que recientemente se ha denominado también geomática, y se ha definido tradicionalmente como la ciencia, el arte y la tecnología para encontrar o determinar las posiciones relativas de puntos situados por encima de la superficie de la Tierra, sobre dicha superficie y por debajo de ella. En un sentido más general la topografía se puede considerar como la disciplina que comprende todos los métodos para medir y recopilar información física acerca de la Tierra y nuestro medio ambiente, procesar esa información y difundir los diferentes productos resultantes a una amplia variedad de clientes (Ghilani, 2009). Es ineludible la necesidad de la topografía y cartografía para la optimización del trazado de cualquier proyecto referente a levantamientos de cualquier zona de la tierra sobre todo en la generación del soporte topográfico con información tridimensional, es decir cartografía digital o numérica y modelos digitales de terreno sobre los cuales proyectar (Santos, 2008). No solo se busca hacer la representación plana del terreno también se tiene en cuenta la altura del mismo. Se debe tener en cuenta frases como “un levantamiento topográfico, que consiste en realizar todas las mediciones necesarias de la zona de interés, con objeto, en general, de obtener un plano topográfico de la misma” (Garcia, 1996), y “un replanteo, que consiste en señalar sobre el terreno, empleando técnicas topográficas, todos los detalles necesarios para el desarrollo de las obras que complete el proyecto.” (Garcia, 1996).. 4.2.. Cartografía. Con el paso del tiempo la cartografía va cambiando y dependiendo de la época su definición puede llegar a variar, a continuación, se muestran algunas definiciones y procesos que abarca: “Ciencia que, a través de una serie de técnicas y procesos, sirve para la concepción y realización de mapas. El procesamiento cartográfico comprende una serie de.
(19) pasos iniciales: toma de fotografías aéreas, apoyo topográfico y definición de coordenadas geodésicas. A continuación tiene lugar la etapa de procesamiento de gabinete, consiste en extraer información de las fotografías aéreas (curvas de nivel, red hidrográfica, accidentes geográficos, contornos de ciudades o construcciones, red viaria, etc.). Al mismo tiempo se procede al control de terreno, lo cual permite verificar diversas mediciones efectuadas sobre la fotografía, identificar topónimos y accidentes y determinar cotas.” (Circulo de Lectores, S.A., 1984) “La Cartografía tiene que ver con la ciencia de la comunicación, ya que a través de los mapas se pueden transferir información espacial acerca de un terreno. Para esto la cartografía se vale del lenguaje gráfico el cual se expresa a través de símbolos y rótulos”. (IGAC, 1995).” (Geoespaciales) También se puede relacionar con otras ciencias y demostrar su importancia en las mismas, por ejemplo en la topología, que define a la cartografía además de un interés geográfico es un campo disciplinar en el cual se permite el desarrollo de habilidades básicas de matematización y de percepción visual, por tanto un camino de investigación respecto al desarrollo de habilidades geográficas, esto relacionado con los mapas y la cartografía (Forero, 2007).. 4.3.. Fotogrametría. Es de conocimiento general que la fotogrametría brinda elementos técnicos importantes para los levantamientos topográficos, por eso debe ser tenida en cuenta su teoría por sus aportes a la calidad y precisión de los mismos. “La Fotogrametría es la medida de un objeto cualquiera, tanto en lo que se refiere a su forma como a su situación, ejecutada por medio de fotografías del mismo objeto. Frecuentemente el uso de las fotografías, especialmente las tomadas desde el aire, no tienen como fin la medida, sino la investigación y la significación del contenido de las vistas, constituyendo la llamada fotointerpretación, en cuanto respecta a la geografía, la geología, la vegetación, o la investigación arqueológica.” (LEHMANN). “Estereofotogrametría ha sido durante mucho tiempo el método más simple para calcular las coordenadas tridimensionales de puntos en un objeto utilizando pares de imágenes 2D estéreo (Egelsn y Kasser , 2001 ) . En las últimas dos décadas, el tremendo desarrollo de rentable, digital de alta calidad cámaras y el aumento exponencial de la potencia de cálculo han llevado de investigación muy activo en el campo de la fotogrametría y ordenador la visión.” ( (Bretar, 2012)) Así mismo, tenemos otros autores que hablan sobre la esta ciencia, uno de ellos que la define en su texto nombrándola con gran relevancia donde textualmente dice:.
(20) Un ejemplo adicional es el digital modelado del terreno , que en los últimos años ha experimentado unas significativas mejoras, en gran parte debido a las nuevas tecnologías tales como la fotogrametría digital o aérea de barrido láser ( ALS ) que puede con millones de perspectivas de salida rápida de puntos sobre la superficie adquirida y producir un modelo de terreno altamente detallado. (Agugiaro & Kolbe, 2012) La importancia de la fotogrametría se puede observar en trabajos de modelos digitales de elevación, por ejemplo la precisión del DEM es extraído por medio de láser de altimetría exploración o fuente fotogrametría digital la cual es importante porque tendrá un impacto en los derivados atributos del terreno. Hudgson y Bresnahan (2004) evaluaron la exactitud de los datos LiDAR derivados (2mnominal posting) para seis categorías de cobertura terrestre utilizando Error Root Mean Square (RMSE). Su estudio resultó indiferente en precisiones vertical y horizontal para diferentes tipos de categorías y cobertura de la tierra. Murphy et al. (2008) llevó a cabo un estudio comparativo sobre el drenaje derivados de red de LiDAR (1m) y DEM fotogramétrico (10m) y llegó a la conclusión de que la red de origen EM LiDAR fue el de más representación exacta del campo - mappednetwork, siendo más precisa que la red derivada foto (Dehvari, 2012).. 4.4.. Modelo digital del terreno, DTM o MDT. El MDT se puede definir de formas diferentes, sin embargo Ángel M. Felicísmo desarrolla un documento llamado: “Modelos Digitales del Terreno”, en el cual cita varios autores que le permiten proponer una definición más precisa del término, la dice que “un MDT es una estructura numérica de datos que representa la distribución espacial de una variable cuantitativa y continua”, esta definición permite entender de una forma más sencilla y clara el término. Hay tecnologías que toman fuerza para generar este tipo de modelos, aparte del vuelo aéreo no tripulado y su exposición en este trabajo, podemos hablar de la generación de los DTM a partir de dichas tecnologías y nos demuestran la importancia de la generación de esta información en los levantamientos topográficos, entre lo que podemos visualizar esta por ejemplo LIDAR, “que son capaces de penetrar a través de la vegetación y la grabación del terreno y debajo de ella. Los costos y la precisión espacial de los sistemas LiDAR son comparables con fotogrametría y métodos de campo tradicionales de topografía. Por estas razones, es ampliamente LiDAR utilizado para generar modelos digitales de terreno ( MDT) , que son esenciales para el entorno de la topografía y las aplicaciones de planificación” (Wu, 2013).
(21) Así mismo hay varios trabajos que necesitan de la imprescindible ayuda de la generación de estos modelos, como podemos observar a continuación, donde se complementa el uso de unas únicas imágenes satelitales de determinados lugares en donde se necesita observar el cambio de la vegetación por ejemplo y deben solucionar el problema. Para hacer frente a este problema , las imágenes multitemporales y datos auxiliares, como mapa de suelos , uso de la tierra existente, conjunto de datos, y el modelo digital del terreno ( DTM), han sido incluidos en algunos de los enfoques (Aleksi Räsänen, 2014).. 4.5.. Sistema de posicionamiento global, GPS. Hoy en día un equipo GPS, dependiendo de las características que tenga, permite capturar y medir con una mayor precisión datos, los cuales permiten un mejor ajuste y procesamiento de la imagen y el modelo digital de terreno, empresas como TRIMBLE ofrecen una amplia gama de equipos los cuales permiten capturar datos. Se entiende por Sistemas Globales de Posicionamiento (GNSS) a sistemas pasivos de navegación basado en satélites emisores de radiofrecuencias, que proporcionan un marco de referencia espacio-temporal con cobertura global, independiente de las condiciones atmosféricas, de forma continua en cualquier lugar de la Tierra, y disponible para cualquier número de usuarios. (Cartografía).. 4.6.. Aeronave remotamente tripulada UX5. La tecnología de los vuelos aéreos remotamente tripulados es de gran relevancia en los últimos años en el entorno de la topografía, por eso la importancia de darla a conocer en pro de demostrar su utilidad y su funcionamiento, algunos conceptos la describen y la avalan: “Diseñado para ayudar a la cartografía y topografía profesionales que requieren la más alta precisión de trabajo de manera más eficiente, el Trimble UX5 establece un nuevo estándar en la cartografía y topografía mediante la combinación de un sistema robusto y muy fácil de usar con una cámara de diseño personalizado que ofrece las prestaciones más impresionantes. El Trimble UX5 le mantiene productivo durante todo el día - cualquier trabajo que está trabajando. También Diseñado para seguir las últimas novedades en el mercado 'prosumidor' cámara, el Trimble UX5 garantiza una calidad de imagen óptima, junto con la máxima precisión fotogramétrica. La cámara UX5 tiene - a diferencia de una cámara.
(22) compacta tradicional - un gran sensor de imagen que captura imágenes muy nítidas y ricas en color, incluso en condiciones de oscuridad o nublados. La cámara de 24 MP y su óptica personalizados dan la UX5 la capacidad de capturar los datos hasta 2,0 cm (0,79 pulgadas) de resolución. El diseño notable de la Trimble UX5 garantiza la empleabilidad en casi todas partes y en prácticamente todas las condiciones climáticas. Ya sea que elija para volar en condiciones de lluvia a lo largo de costas de viento, en los desiertos cálidos, o en un terreno montañoso cubierto de nieve, el Trimble UX5 es una solución fiable para recopilar datos de alta calidad sin comprometer la cobertura. El Trimble UX5 supera las limitaciones de los desembarques UAS tradicionales con la adición de un método de control avanzado. Sobre la base de empuje invertido, este innovador mejora de los resultados de medición de altitud en los aterrizajes precisos y predecibles para el aterrizaje de la confianza cada vez. Para los profesionales que trabajan en áreas pequeñas, el ángulo de aterrizaje y la trayectoria es compacto y permite aterrizajes en espacios confinados. Sobre la base de un método de producción patentado por Trimble, Trimble UX5 combina una estructura de espuma resistente al impacto y elementos compuestos internos y externos que le dan al UX5 su durabilidad y resistencia extrema. Además, el enfoque de diseño ha sido en la entrega de un fácil mantener fuselaje que puede ser renovado a discreción de los usuarios por un ajuste de plug-and-play de la electrónica interna protegidas. La aplicación Trimble Access de imágenes aéreas cargado en el Trimble Tablet PC robusta opera el Trimble UX5 y es una sola herramienta de software para la planificación de sus misiones aéreas, realizar comprobaciones previas al vuelo y el seguimiento de sus vuelos - todos con los flujos de trabajo intuitivos que garantizan resultados confiables. En el campo, el operador es guiado a través de las secuencias de pre y post-vuelo con listas de control digitales paso a paso. Para el ahorro de tiempo y recursos adicionales, muchos de los cheques Trimble UX5 son verificados automáticamente por el software y no requieren ninguna interacción por parte del operador. Además, el flujo de trabajo rápido e intuitivo permite al Trimble UX5 para estar listo para volar en sólo 5 minutos, lo que garantiza un tiempo mínimo.” (UAS, s.f.)..
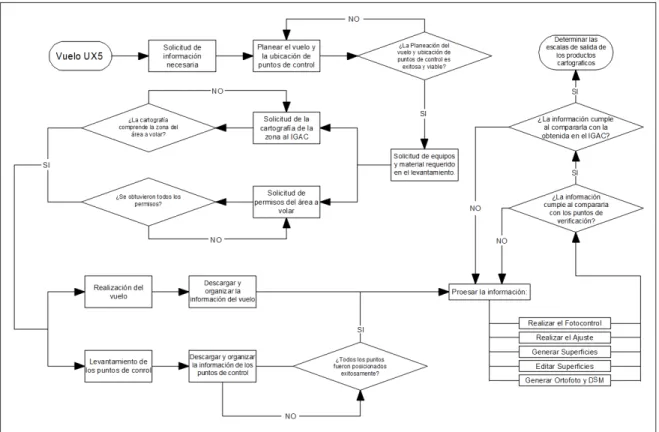
(23) 5. METODOLOGÍA. 5.1.. Diagrama de actividades. Para la realización del vuelo con el UX5 se desarrollan una serie de actividades que permiten planificar, ejecutar el vuelo y procesar los datos que permiten obtener el producto que se está buscando como se observa en el siguiente diagrama. Figura 1. Diagrama de Flujo. Fuente: Elaboración propia.. 5.2.. Conceptualización. La empresa DATUM Ingeniería realiza actividades de levantamientos topográficos, a través de drones como la Aeronave remotamente tripulada UX5 entre otros. Para la actividad descrita se utilizó uno de sus equipos. Las características de este equipo brindan confiabilidad, sus productos tras describen una adquisición de productos de alta calidad y precisión, se puede utilizar el equipo en todo tipo de.
(24) terreno y clima, además de ser preparado para uso intensivo y ser una solución duradera y confiable. Sus especificaciones técnicas describen también flujos de trabajo de Trimble Access completamente automatizados que facilitan el uso y permiten la operación segura, y lo más importante, tiene un procesamiento de datos simple con el módulo de fotogrametría de Trimble Bussines Center. (http://www.altop.com/producto/trimble-ux5).. 5.3.. Descripción municipio. Figura 2. Municipio de Cundinamarca. Fuente: http://cdn.radiosantafe.com//wp-content/uploads/2011/10/mapa-cundinamarca.jpg.
(25) Figura 3. Municipio de Chía. Fuente:http://cundinet.cundinamarca.gov.co:8080/aplicaciones/municipios.nsf/0/20F1B1ECC0262F AE05257C190035C1FB/$file/file_municipios7717.gif. En la provincia de Sabana Centro en el departamento de Cundinamarca, se ubica el municipio de Chía, aledaño a este, se sitúa la vía Bogotá-Tunja, o La CaroTocancipá, en el tramo de esta vía, próximo a la ubicación de sectores conocidos y referenciados como el Castillo Marroquín y la empresa Almaviva, se situó el área del levantamiento para el proyecto con el dron UX5. Figura 4. Área del levantamiento. Fuente: Google Earth.
(26) 5.4.. Recopilación información primaria. En esta fase se visitó el lugar de trabajo, se adquirió información del terreno y su conformación, se visualizó que cuenta con una altimetría variada, no es un sector plano y por el cual pasa la vía que de Bogotá y conduce hacia Tunja. Al revisar la zona se planeó el vuelo teniendo en cuenta las diferencias de altura para realizarlo sin inconvenientes.. En la zona se encontraron algunas propiedades privadas, en estos casos se solicitó un permiso para acceder a los predios, debido que los puntos de control quedaban dentro de los predios. En la mayoría de los casos se obtuvo el permiso, sin embargo, hay un condominio de casas en la zona, pero no fue posible contar con la aprobación del administrador para acceder y ubicar el punto de control, se ubicó una buena cantidad de puntos alrededor que otorgan la confiabilidad de un trabajo óptimo en la instalación y determinación de los puntos de control.. 5.5.. Recopilación información secundaria. Una vez determinada e identificada la zona donde se realizará el vuelo, se determina que información de cartografía existe se requiere para comparar más adelante los resultados obtenidos, con resultados ya establecidos.. La información se solicitó mediante el conducto regular al IGAC, con el fin de tener un punto de comparación de los datos que se obtendrán. El IGAC suministra cartografía de la zona la cual fue levantada por otros métodos diferentes al que se está usando en este proyecto, es una información muy confiable que permite tener un buen punto de comparación..
(27) A continuación, se muestra la información suministrada. Figura 5. Cartografía de la zona del levantamiento. Fuente: INSTITUTO GEOGRÁFICO AGUSTÍN CODAZZI.. Una vez se obtiene la información, se verifica que comprenda toda la zona del vuelo que se va a realizar, con el fin que no falte ninguna zona para realizar la comparación más adelante, de los productos que se van a generar con el levantamiento suministrado por el IGAC..
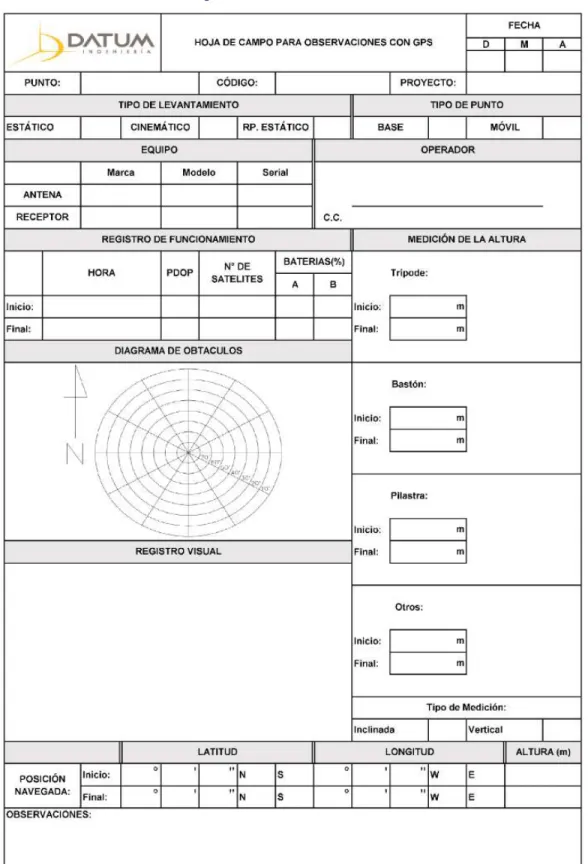
(28) 5.6.. Formatos de campo. Al realizar el levantamiento de los puntos de control, se estableció un formato de campo el cual permite documentar la información requerida para el post-proceso y tener un registro de lo realizado en campo, se utilizó un formato para describir la ubicación detalla del punto y otro formato para tomar los datos del GPS. En oficina todos los datos tomados en campo en los formatos, se pasaron a digital para tener toda la información, más clara y ordenada, Estos dos formatos fueron los usados para realizar el levantamiento de todos los puntos de control y se muestran a continuación:. Figura 6. Formato, descripción del punto. Fuente: Elaboración propia con DATUM Ingeniería..
(29) Figura 7. Formato, datos del GPS. Fuente: Elaboración propia con DATUM Ingeniería.
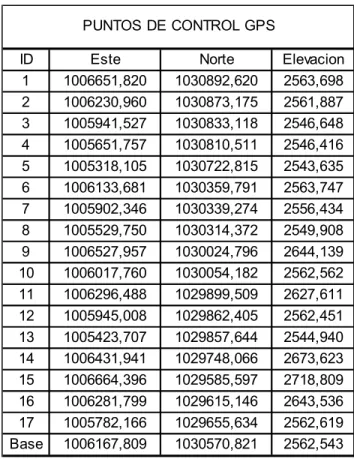
(30) 5.7.. Levantamiento puntos de control. Una vez se reconoce la zona y se determinan las áreas donde se van a ubicar los puntos de control, se procede a realizar el trabajo de campo, para este caso se usaron dos GPS de Trimble R10, los cuales suministró la empresa DATUM Ingeniería. En el trabajo de campo, se tomó como base el punto B15-NE ubicado en la carretera central norte, en el KM 31 La Caro-Chía y se realizó el levantamiento de los puntos, en total se tomaron 17. Sin embargo, el punto 05, no se pudo tener en cuenta, debido que el vuelo se hizo antes de tomar este punto y las fotos que tomo el dron no muestran con claridad el objeto donde fue tomado. En los anexos, se muestran los formatos de campo de los puntos de control realizados durante el levantamiento.. 5.8.. Realización del vuelo. Para la ejecución del vuelo, se contó con el trabajo del Ingeniero Darwin Baquero Hernández, piloto el UX5, ya que él cuenta con la experiencia y los permisos para poder hacerlo. El vuelo se ejecutó en la Pista RC el Avispero ubicada en la Carretera Central Note, Kilómetro 31, La Caro-Chía, al realizar el vuelo es necesario previamente establecer las líneas de vuelo y el plan de vuelo, con el fin de determinar según la topografía de la zona en qué dirección volara el dron para que no tenga inconvenientes y que abarque toda el área de interés.. 5.9.. Procesamiento de la información. Una vez descargada y verificada la información de los puntos de control y del vuelo, se procede a organizarla para poder procesarla, lo primero que se hizo fue procesar los datos de los GPS para obtener las coordenadas de cada uno de los puntos y estas fueron las coordenadas obtenidas..
(31) Tabla 1. Coordenadas, puntos de control.. PUNTOS DE CONTROL GPS ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,820 1006230,960 1005941,527 1005651,757 1005318,105 1006133,681 1005902,346 1005529,750 1006527,957 1006017,760 1006296,488 1005945,008 1005423,707 1006431,941 1006664,396 1006281,799 1005782,166 1006167,809. Norte 1030892,620 1030873,175 1030833,118 1030810,511 1030722,815 1030359,791 1030339,274 1030314,372 1030024,796 1030054,182 1029899,509 1029862,405 1029857,644 1029748,066 1029585,597 1029615,146 1029655,634 1030570,821. Elevacion 2563,698 2561,887 2546,648 2546,416 2543,635 2563,747 2556,434 2549,908 2644,139 2562,562 2627,611 2562,451 2544,940 2673,623 2718,809 2643,536 2562,619 2562,543. Fuente: Elaboración propia.. Los datos obtenidos con él UX5, solo fueron verificados debido que estos no necesitan un procesamiento adicional antes de cargarlos en el software.. 5.10. UAS Master. El UAS Master, es el software utilizado para realizar la primera parte del procesamiento de la información, este software permite realizar todo el flujo de trabajo hasta obtener los productos, pero es muy poco amigable con la edición de las nubes de puntos que se generan. Lo primero que se debe hacer es configurar los parámetros del proyecto, cuadrar las coordenadas respecto de la zona en la que se realizó el vuelo, para luego cargar las características de la cámara y la información que se obtuvo en el vuelo..
(32) Figura 8. Configuración, sistema de referencia del UX5.. Fuente: Elaboración propia.. Figura 9. Configuración, sistema de referencia del levantamiento.. Fuente: Elaboración propia..
(33) Figura 10. Especificaciones de la cámara.. Fuente: Elaboración propia.. Una vez establecidas los parámetros básicos del vuelo, se procede a cargar las imágenes obtenidas con el UX5 durante el vuelo e ingresar el valor de la cota de terreno promedio de la zona, para este caso según la altimetría es de 2625 m.s.n.m.. Figura 11. Configuración, fotos y altura promedio de terreno.. Fuente: Elaboración propia.. Una vez cargadas las fotos del vuelo, es necesario asociar los centros de foto a cada una de las fotografías y cargar los datos de los puntos de control para que el.
(34) software les dé una ubicación previa para luego realizar el fotocontrol, una vez preparado el proyecto se ve de la siguiente manera.. Figura 12. Interfaz inicial con el proyecto cargado. Fuente: Elaboración propia. En el proyecto se cargan todos los puntos de control, sin embargo, el proceso se dividió en tres partes, la primera parte solo se procesa con cinco puntos de control, en la segunda parte se procesa con nueve puntos de control y en la última parte se procesa con la totalidad de los puntos de control.. 5.11. Fotocontrol. El fotocontrol es un proceso que permite ajustar la información para que tenga coordenadas mucho más acordes a la realidad, se realiza con las coordenadas de los puntos que se obtuvieron en campo y se miden en el software para que los tenga en cuenta al momento del procesamiento para que se ajuste la información a los puntos que se toman como referencia.. Por medio de la herramienta UAS Measure, la cual se encuentra en la barra inicial de herramientas del software con el siguiente icono, , se procede a medir.
(35) cada uno de los puntos que se utilizaran para realizar el fotocontrol, para el primer proceso solo se utilizaron cinco puntos de control los cuales fueron: Figura 13. Punto de control 1. Figura 14. Punto de control 4. Figura 15. Punto de control 6. Figura 16, Punto de control 13. Figura 17. Punto de control 15. Fuente: Elaboración propia. Una vez determinados los puntos de control a usar, se procede a medir cada uno de los puntos. Hay que identificar en que fotos aparece cada uno y con las herramientas del software realizar la medición. La interfaz de la herramienta UAS Measure se ve de la siguiente manera una vez se tiene cargado y listo el proyecto. Figura 18. UAS Measure. Fuente: Elaboración propia.
(36) Para empezar la medición de cada uno de los puntos que se van a tener en cuenta solo hay que dar doble clic en el número respectivo en el cuadro de Point List. Figura 19. Point List. Fuente: Elaboración propia. Como se observa en la imagen los puntos están en rojo, lo que significa que aún no han sido medidos, el software automáticamente hace una preselección en las imágenes que relaciona donde puede estar el punto y en algunos casos pasa de estar en rojo, a estar en amarillo, sin embargo, es necesario medirlos de nuevo para que los tome en el proceso, una vez son medidos los puntos cambian a verde y queda de la siguiente manera. Figura 20. Point list, después de la medición de los puntos. Fuente: Elaboración propia.
(37) Una vez medidos todos los puntos que se tendrán en cuenta para el primer proceso se procede con los tie points o puntos de paso, los cuales son puntos en común de las imágenes que automáticamente selecciona el software para realizar el ajuste.. 5.12. Ajuste. Una vez terminado el fotocontrol, se corre el proceso, que genera los tie points o puntos de paso y a su vez incluye los puntos medidos. El proceso se puede correr a diferentes resoluciones, las cuales varían en la cantidad de tie point que genera el software entre las imágenes, para este caso se realizarán todos los procesos con Full Resolution, para realizar el ajuste solo es iniciar el proceso en el menú de Extract en la herramienta de UAS Measure como se muestra a continuación. Figura 21. Resoluciones de la calidad del proceso. Fuente: Elaboración propia. Una vez finaliza el proceso se puede cerrar la herramienta UAS Measure, debido que lo siguiente es generar el DSM y la ortofoto, procesos los cuales se realizan con la herramienta de UAS editor.. 5.13. DSM. Lo primero que se debe hacer es iniciar la herramienta de UAS editor, la cual se encuentra en la barra de menú del software con el siguiente icono, , esta herramienta no solo permite generar el DMS y la ortofoto, también permite editar la.
(38) nube de puntos que se generó a partir de las imágenes, con el fin de borrar información que pueda causar ruido o que no sea fiel a lo que se tiene en terreno. En este proyecto no se realizará edición de la nube de puntos, debido que se busca determinar la precisión que se puede tener en un levantamiento con un drone y se puede lograr solo obteniendo el DSM y comprando con las coordenadas de cada uno de los puntos de control. Una vez cargada la herramienta de UAS Editor, en el menú de Surface se puede correr el proceso que genera el DSM, este proceso permite generar tres tipos diferentes, los cuales se diferencian en la densidad de puntos que tendrá en DSM, para este caso se corrió el proceso con la nube de puntos densa como se muestra a continuación.. Una vez finalizado el proceso, ya se tiene la nube de puntos la cual tiene todas las características del terreno la cual se puede editar más adelante para obtener un DTM.. 5.14. Ortofotomosaico. El ortofotomosaico, es una imagen la cual genera el programa uniendo todas las fotografías que se tomaron en el vuelo y ajustándola respecto del fotocontrol para que este ubicada espacialmente. Generarla es un proceso que se corre en la herramienta de UAS Editor, en el menú de Otrho and Mosaic, en este menú se coloca el tamaño del pixel en metros el cual se determina respecto de la altura de vuelo y con unas tablas predeterminas que tiene el drone las cuales permiten saber el tamaño del pixel respecto de la altura de vuelo, en este menú se tienen dos opciones para generar la ortofoto los cuales con clásica y verdadera, para este caso se utilizó True Ortho.. 5.15. Generación De Tablas. Una vez generada la ortofoto, en el software ArcGIS en ArcMap, se carga la ortofoto y se miden los puntos para luego interpolarlos con el DSM obtenido y así generar una tabla de coordenadas que permita comparar las coordenadas de la información procesada respecto de la obtenida en campo..
(39) Para realizar la medición de los puntos es necesario tomarlos siempre sobre el mismo pixel y dependiendo del desplazamiento que tenga la ortofoto se puede determinar que error tiene respecto de las coordenadas de los puntos tomados con GPS en campo. En el software de ArcGIS se carga la ortofoto y se crea un shape con el mismo sistema de referencia del proyecto, se miden los puntos sobre la ortofoto y queda de la siguiente manera: Figura 22. Ortofoto y shape de puntos.. Fuente: Elaboración propia. El siguiente paso es cargar el DSM, en el Arc Toolbox, en 3d Analyst Tools, en Functional Surface, con la herramienta de Interpolate Shape, se interpola el shape con el DSM para que tengan coordenadas X, Y, Z, como se muestra a continuación: Figura 23. DSM y shape de puntos.. Fuente: Elaboración propia.
(40) Una vez se tiene el shape con las coordenadas, se exportan a una tabla de texto para tener un mejor manejo y visualización de la información, de esta manera se termina el primer proceso y se repite dos veces más, aumentado cada vez, la cantidad de puntos de control que se miden en el fotocontrol y así poder determinar cuál es la diferencia en el error de cada uno de los procesos. Para el segundo proceso denominado proceso Kappa, se añadieron cuatro puntos de control para tener un total de nueve puntos, los puntos que se midieron fueron los siguientes:. Figura 24. Punto de control 3. Figura 25. Punto de control 8. Figura 26. Punto de control 9. Figura 27. Punto de control 17. Fuente: Elaboración propia. Una vez terminado ajuste con los nuevos puntos, se procedió a realizar todos los pasos del primer proceso para obtener el DSM del terreno, de esta manera se genera la tabla de coordenadas del segundo proceso que permita compararla con la información de campo de la misma forma que se realizó con el primer proceso..
(41) Para el tercer y último proceso, denominado proceso Omega, se tomaron la totalidad de los puntos que se levantaron en campo para realizar el fotocontrol, aunque en total de levantaron 17 puntos de control, no todos los puntos se usaron para realizar el ajuste, debido que se dejaron unos puntos de verificación, en este proceso se adicionaron seis puntos los cuales fueron los siguientes:. Figura 28. Punto de control 2. Figura 29. Punto de control 7. Figura 30. Punto de control 11. Figura 31. Punto de control 10. Figura 32. Punto de control 14. Figura 33. Punto de control 16. Fuente: Elaboración propia. Una vez más se realiza el mismo proceso, al obtener el DSM se genera la tabla de coordenadas para compararla con los puntos medidos en campo..
(42) De los tres procesos se obtienen las siguientes tablas: Tabla 2. Coordenadas puntos, proceso Alfa UX5. Tabla 3. Coordenadas puntos, proceso Kappa UX5. PUNTOS PROCESO ALFA. PUNTOS PROCESO KAPPA. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,800 1006231,000 1005941,500 1005651,801. Norte 1030892,700 1030873,200 1030833,200 1030810,600. Elevacion 2562,435 2561,942 2546,417 2546,386. 1006133,700 1005902,500 1005529,900 1006528,000 1006017,700 1006296,600 1005944,900 1005423,700 1006431,800 1006664,300 1006281,600 1005782,000 1006167,853. 1030359,700 1030339,300 1030314,400 1030024,500 1030054,100 1029899,300 1029862,400 1029857,700 1029747,800 1029585,500 1029614,700 1029655,600 1030570,751. 2563,689 2555,990 2549,764 2643,680 2561,922 2627,055 2561,813 2544,897 2673,037 2718,254 2643,051 2562,166 2562,249. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,800 1006230,900 1005941,500 1005651,800. Norte 1030892,700 1030873,100 1030833,100 1030810,600. Elevacion 2562,617 2561,851 2546,379 2546,295. 1006133,700 1005902,500 1005529,900 1006528,000 1006017,801 1006296,700 1005945,100 1005423,800 1006431,900 1006664,300 1006281,700 1005782,100 1006167,851. 1030359,700 1030339,300 1030314,400 1030024,700 1030054,200 1029899,500 1029862,400 1029857,700 1029747,900 1029585,600 1029615,000 1029655,600 1030570,650. 2563,745 2556,125 2549,824 2644,162 2562,196 2627,468 2562,202 2544,970 2673,401 2718,545 2643,822 2562,667 2562,218. Tabla 4. Coordenadas puntos, proceso Omega UX5 PUNTOS PROCESO OMEGA ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,800 1006231,001 1005941,500 1005651,800. Norte 1030892,700 1030873,200 1030833,100 1030810,599. Elevacion 2563,642 2561,812 2546,380 2546,285. 1006133,700 1005902,500 1005529,900 1006528,000 1006017,800 1006296,700 1005945,000 1005423,800 1006431,900 1006664,300 1006281,800 1005782,100 1006167,849. 1030359,700 1030339,300 1030314,400 1030024,700 1030054,200 1029899,500 1029862,400 1029857,700 1029748,000 1029585,600 1029615,100 1029655,600 1030570,749. 2563,836 2556,402 2549,860 2644,149 2562,466 2627,466 2562,382 2544,957 2673,348 2718,527 2643,652 2562,668 2562,249. Fuente: Elaboración propia. En cada uno de los procesos, al comparar cada una de las tablas obtenidas con las coordenadas de campo de los puntos de control, se obtiene una diferencia de cada.
(43) una, a esa diferencia se le aplica la fórmula del error medio cuadrático para comprobar que al procesar y generar los productos, si este se realiza con una mayor cantidad de puntos de control, el error final será menor, de esta manera se determinó que el proceso con mayor cantidad de puntos de control fue el más óptimo. Las tablas del error obtenidas de los procesos fueron las siguientes: Tabla 5. Diferencia proceso Alfa UX5.. Tabla 6. Diferencia proceso Kappa UX5.. Tabla 7. Diferencia proceso Omega UX5. DIFERENCIA PROCESO ALFA. DIFERENCIA PROCESO KAPPA. DIFERENCIA PROCESO OMEGA. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,020 0,040 0,027 0,044. Norte 0,080 0,025 0,082 0,089. Elevacion 1,263 0,055 0,231 0,030. 0,019 0,154 0,150 0,043 0,060 0,112 0,108 0,007 0,141 0,096 0,199 0,166 0,044. 0,091 0,026 0,028 0,296 0,082 0,209 0,005 0,056 0,266 0,097 0,446 0,034 0,070. 0,058 0,444 0,144 0,459 0,640 0,556 0,638 0,043 0,586 0,555 0,485 0,453 0,294. Error 0,1027 0,1642. 0,5081. Este 0,020 0,060 0,027 0,043. Norte 0,080 0,075 0,018 0,089. Elevacion 1,081 0,036 0,269 0,121. 0,019 0,154 0,150 0,043 0,041 0,212 0,092 0,093 0,041 0,096 0,099 0,066 0,042. 0,091 0,026 0,028 0,096 0,018 0,009 0,005 0,056 0,166 0,003 0,146 0,034 0,171. 0,002 0,309 0,084 0,023 0,366 0,143 0,249 0,030 0,222 0,264 0,286 0,048 0,325. Error 0,0925 0,0847. 0,3332. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,020 0,041 0,027 0,043. Norte 0,080 0,025 0,018 0,088. Elevacion 0,056 0,075 0,268 0,131. 0,019 0,154 0,150 0,043 0,040 0,212 0,008 0,093 0,041 0,096 0,001 0,066 0,040. 0,091 0,026 0,028 0,096 0,018 0,009 0,005 0,056 0,066 0,003 0,046 0,034 0,072. 0,089 0,032 0,048 0,010 0,096 0,145 0,069 0,017 0,275 0,282 0,116 0,049 0,294. Error 0,0858 0,0544. 0,1538. Fuente: Elaboración propia. Como se puede observar en las tablas generadas, en la medida que el proceso se realizó con una mayor cantidad de puntos de control, el error cada vez fue disminuyendo, debido que las tablas se generaron a partir del DSM obtenido al final de cada proceso esto asegura que la calidad de los productos cada vez mejoro la precisión y la calidad de los mismos. De esta manera se comprueba que a mayor cantidad de puntos de control la precisión es mayor y la calidad de los productos va a mejorar siempre. Con esto en mente siendo el proceso Omega el más óptimo, se repitió en los software de Agisoft y Pix4D, con el fin de determinar las diferencias del procesamiento de la información, la calidad y la precisión de los productos que se puede obtener con cada uno..
(44) 5.16. Agisoft. “Agisoft PhotoScan, es un software que permite el procesamiento fotogramétrico de imágenes digitales y genera datos espaciales 3D” (Agisoft, s.f.), teniendo la información del vuelo obtenida con el drone, más los datos para realizar el fotocontrol, el software permite generar el mosaico y los modelos digitales de terreno los cuales se pueden comparar con los obtenidos en UAS Master y determinar las diferencias visuales y el error. Agisoft, tiene una versión de prueba de 30 días, la cual permite generar los productos necesarios para realizar la comparación, teniendo en cuenta que el proceso Omega, fue el que género menor error, este mismo proceso se repitió. La interfaz y el flujo de trabajo, son similares a las de UAS Master, sin embargo, Agisoft es un poco más amigable e intuitivo con el usuario, permitiendo generar los productos necesarios de una manera más rápida y sencilla. Los productos obtenidos fueron la nube de puntos, el DSM y el Ortofotomosaico. Al generar los productos principales, se realizó el mismo proceso para el error, el cual consistió en medir sobre el mosaico cada uno de los puntos, siempre verificando que sea el mismo pixel que en los anteriores procesos y luego interpolándolos con el DSM para obtener coordenadas XYZ de cada uno, con el fin de generar la siguiente tabla y al final realizar la comparación del error y los demás productos con los resultados de los otros dos software. Tabla 8. Coordenadas, proceso Omega Agisoft. PUNTOS PROCESO AGISOFT ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,928 1006230,875 1005941,492 1005651,718. Norte 1030892,671 1030873,190 1030833,150 1030810,634. Elevacion 2563,671 2561,010 2547,573 2547,045. 1006133,664 1005902,529 1005530,425 1006528,089 1006017,852 1006295,880 1005944,821 1005423,717 1006431,858 1006664,264 1006281,879 1005782,313 1006170,421. 1030359,723 1030339,360 1030314,000 1030024,819 1030054,286 1029899,314 1029862,507 1029857,610 1029747,965 1029585,556 1029614,927 1029655,846 1030573,677. 2563,826 2555,842 2549,960 2644,389 2562,316 2627,739 2562,727 2544,845 2673,366 2718,812 2643,878 2562,606 2563,416. Fuente: Elaboración propia.
(45) 5.17. Pix4Dmapper. “Pix4D es un software de fotogrametría que utiliza imágenes para generar nubes de puntos, modelos digitales de superficie y terreno, ortomosaicos, modelos texturados y mucho más”. (Pix4D, 2017). También puede ser usado para la minería, la cartografía y la topografía forense, sin embargo, en este caso se utilizará, para generar los mismos productos anteriores y de esta manera poder comparar la calidad que ofrece cada uno de los tres software y la precisión que pueden llegar a tener. Pix4D, tiene un flujo de trabajo y una interfaz muy similar al de los anteriores software, si se compara con los anteriores se evidencia un caso similar al de Agisoft, ya que al compararlo con el UAS Master, es un poco más amigable e intuitivo con el usuario, sin embargo, es un software que ofrece muchas más opciones y puede ser empleado en muchos más campos que los anteriores. Tiene una versión de prueba que permite realizar muchos procesos, entre los cuales permitió la generación de los siguientes productos, la nube de puntos, el DSM y el Ortofotomosaico. Una vez generados los productos necesarios para realizar las comparaciones, se realizó el mismo proceso para obtener la tabla del de la diferencia de los puntos de GPS respecto de los puntos medidos sobre el DSM para interpolarlos y así obtener las coordenadas XYZ de cada uno, de este proceso se obtuvo la siguiente tabla: Tabla 9.Coordenadas, proceso Omega Pix4D PUNTOS PROCESO PIX4D ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 1006651,780 1006230,852 1005941,457 1005651,783. Norte 1030892,692 1030873,230 1030833,177 1030810,612. Elevacion 2563,432 2561,835 2546,470 2546,045. 1006133,635 1005902,440 1005529,839 1006527,955 1006017,711 1006296,445 1005945,031 1005423,692 1006431,867 1006664,191 1006281,717 1005782,095 1006167,813. 1030359,784 1030339,384 1030314,373 1030024,887 1030054,219 1029899,747 1029862,414 1029857,717 1029748,092 1029585,719 1029615,147 1029655,576 1030570,725. 2563,800 2556,342 2549,808 2644,242 2562,524 2627,146 2562,529 2544,860 2673,328 2717,693 2643,665 2562,671 2562,364. Fuente: Elaboración propia.
(46) 6. ANÁLISIS DE RESULTADOS A continuación, se presenta un análisis de los resultados obtenidos, donde se especifican los valores de precisión de cada proceso en las coordenadas X, Y y Z. El procedimiento de este análisis de resultados se basó en la comparación de las diferencias de las coordenadas obtenidas respecto de las coordenadas de los puntos de control levantadas en campo. Los primeros procesos realizados fueron con el software UAS Master, en total se realizaron tres procesos, uno con un mínimo de puntos de control, cinco puntos, llamado proceso Alfa, otro con un nivel medio de nueve puntos, denominado proceso Kappa, y el último proceso con la totalidad de los puntos tomados en campo para realizar el fotocontrol, en este caso quince, el cual se nombró como proceso Omega. Una vez realizados los tres procesos, en el software UAS Master y obtenidas las coordenadas de cada uno de los puntos, se procedió a tomar la diferencia de las coordenadas y aplicando la fórmula del error medio cuadrático, se obtuvo el error en cada uno de los tres procesos, una vez hecho esto se obtuvieron las siguientes tablas, las cuales y se mostraron en la metodología y se realizó un análisis previo. Tabla 10. Diferencia proceso Alfa UX5.. Tabla 11. Diferencia proceso Kappa UX5.. Tabla 12. Diferencia proceso Omega UX5. DIFERENCIA PROCESO ALFA. DIFERENCIA PROCESO KAPPA. DIFERENCIA PROCESO OMEGA. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,020 0,040 0,027 0,044. Norte 0,080 0,025 0,082 0,089. Elevacion 1,263 0,055 0,231 0,030. 0,019 0,154 0,150 0,043 0,060 0,112 0,108 0,007 0,141 0,096 0,199 0,166 0,044. 0,091 0,026 0,028 0,296 0,082 0,209 0,005 0,056 0,266 0,097 0,446 0,034 0,070. 0,058 0,444 0,144 0,459 0,640 0,556 0,638 0,043 0,586 0,555 0,485 0,453 0,294. Error 0,1027 0,1642. 0,5081. Este 0,020 0,060 0,027 0,043. Norte 0,080 0,075 0,018 0,089. Elevacion 1,081 0,036 0,269 0,121. 0,019 0,154 0,150 0,043 0,041 0,212 0,092 0,093 0,041 0,096 0,099 0,066 0,042. 0,091 0,026 0,028 0,096 0,018 0,009 0,005 0,056 0,166 0,003 0,146 0,034 0,171. 0,002 0,309 0,084 0,023 0,366 0,143 0,249 0,030 0,222 0,264 0,286 0,048 0,325. Error 0,0925 0,0847. 0,3332. Fuente: Elaboración propia. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,020 0,041 0,027 0,043. Norte 0,080 0,025 0,018 0,088. Elevacion 0,056 0,075 0,268 0,131. 0,019 0,154 0,150 0,043 0,040 0,212 0,008 0,093 0,041 0,096 0,001 0,066 0,040. 0,091 0,026 0,028 0,096 0,018 0,009 0,005 0,056 0,066 0,003 0,046 0,034 0,072. 0,089 0,032 0,048 0,010 0,096 0,145 0,069 0,017 0,275 0,282 0,116 0,049 0,294. Error 0,0858 0,0544. 0,1538.
(47) Figura 34. Diferencia de los errores UAS Master DIFERENCIA PROCESO ALFA. Error. 0,1027 0,1642 0,5081. DIFERENCIA PROCESO KAPPA. DIFERENCIA PROCESO OMEGA. Error. Error. 0,0925 0,0847 0,3332. 0,0858 0,0544 0,1538. Fuente: Elaboración propia. Como se puede observar en cada uno de los procesos, el error disminuye a medida que se procesa la información con una mayor cantidad de puntos de control, de esta manera se demuestra que la precisión si aumenta en la medida en que hay más puntos de control para realizar el postproceso. Con este análisis, se procedió a repetir el proceso Omega, en los software de Pix4D y Agisoft, como se mostró anteriormente, de estos procesos también se obtuvieron las coordenadas de los puntos para realizar la comparación con las coordenadas de los puntos de control, a continuación, se muestran las tablas de los errores que se obtuvieron de los procesos. Figura 35. Coordenadas Proceso UAS. Figura 36. Coordenadas Proceso Agisoft. Figura 37. Coordenadas Proceso Pix4D. DIFERENCIA PROCESO UAS. DIFERENCIA PROCESO AGISOFT. DIFERENCIA PROCESO PIX4D. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,020 0,041 0,027 0,043. Norte Elevacion 0,080 0,056 0,025 0,075 0,018 0,268 0,088 0,131. 0,019 0,154 0,150 0,043 0,040 0,212 0,008 0,093 0,041 0,096 0,001 0,066 0,040. 0,091 0,026 0,028 0,096 0,018 0,009 0,005 0,056 0,066 0,003 0,046 0,034 0,072. 0,089 0,032 0,048 0,010 0,096 0,145 0,069 0,017 0,275 0,282 0,116 0,049 0,294. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,108 0,085 0,035 0,039. Norte Elevacion 0,051 0,027 0,015 0,877 0,032 0,925 0,123 0,629. 0,017 0,183 0,675 0,132 0,092 0,608 0,187 0,010 0,083 0,132 0,080 0,147 2,612. 0,068 0,086 0,372 0,023 0,104 0,195 0,102 0,034 0,101 0,041 0,219 0,212 2,855. 0,079 0,592 0,052 0,250 0,246 0,128 0,276 0,095 0,257 0,003 0,342 0,013 0,873. Fuente: Elaboración propia. ID 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Base. Este 0,040 0,108 0,070 0,026. Norte Elevacion 0,072 0,266 0,055 0,052 0,059 0,178 0,101 0,371. 0,046 0,094 0,089 0,002 0,049 0,043 0,023 0,015 0,074 0,205 0,082 0,071 0,004. 0,007 0,110 0,001 0,091 0,037 0,238 0,009 0,073 0,026 0,122 0,001 0,058 0,096. 0,053 0,092 0,100 0,103 0,038 0,465 0,078 0,080 0,295 1,116 0,129 0,052 0,179.
(48) Como se indicó anteriormente para obtener estas coordenadas se midieron los puntos sobre el ortofotomosaico y posteriormente se interpolaron con el DSM respectivo, a continuación, se muestran las ortofotomosaico y los DSM de cada uno de los procesos.. Figura 38. Ortofotomosaico UAS Master. Fuente: Elaboración propia.
(49) Figura 39. DSM UAS Master. Fuente: Elaboración propia. Con los productos obtenidos en el software de UAS Master y revisándolos de una manera poco detallada, se puede observar una buena calidad del Ortofotomosaico, donde sin modificar los parámetros básicos del software, este no realiza automáticamente el recorte de los bordes de las fotos para generarlo con un borde definido; respecto del DSM, solo se pueden percibir algunas zonas en donde la vegetación distorsiona un poco la información, el software si general el DSM con un borde definido y en general se observa una buena calidad del producto..
(50) Figura 40. Ortofomosaico Agisoft. Fuente: Elaboración propia.
(51) Figura 41. DSM Agisoft. Fuente: Elaboración propia. Con los productos obtenidos en el software de Agisoft y revisándolos de una manera poco detallada, se puede observar una buena calidad del Ortofotomosaico, donde sin modificar los parámetros básicos del software, este no realiza automáticamente el recorte de los bordes de las fotos para generarlo con un borde definido; respecto del DSM, el software no genera un recorte de la información para que tenga un borde definido y en general no se observa gran detalle en ninguna zona del DSM..
(52) Figura 42. Ortofotomosaico Pix4D. Fuente: Elaboración propia.
Figure


+7



Outline
Documento similar