Control del movimiento de un robot móvil a control remoto a través de señales EOG
23
0
0
Texto completo
(2) Palabras clave: EOG, comunicación inalámbrica, micro controlador, electrodos.. Abstract: A mobile robot was implemented which is controlled by means of electrooculography (EOG) signals, which is possible by means of electrodes that are located in the upper and lower part of the eyes to take reference of the movement of the same, later this obtained signal will be processed by means of an amplification and filtering stage, in order to obtain an easy to manipulate signal. Continuing with the process, the modified signal is sent to a control system which will take its respective action which depends on the position of the eye. The communication between the two control systems to be used will be wireless, thus reaching the specific order to the control system that will be carried by the mobile robot which will execute said action. For the handling of the signal obtained, an analog to digital converter (ADC) was needed, which we used from the control system that already had this function, it was only configured in such a way that we could manipulate the generated signals. On the other hand, a communication was established via Bluetooth, which consists of two modules HC-05, which have a range of no more than 10m, these modules were previously configured so that communication could be established between them, leaving one in mode slave and the other in master mode.. Key Words: EOG, wireless communication, micro controller, electrodes..
(3) Fecha de envío:. 1. Introducción En la actualidad ocurren accidentes que generan lesiones permanentes en los seres humanos, según la Organización Mundial de la Salud (OMS) “se estima que alrededor del 15% de la población mundial, son personas con discapacidad y que tal proporción está en aumento, en el caso de Colombia el número de personas discapacitadas alcanza el 6.3% de la población que son aproximadamente 2’624.898 de personas”[1]. Teniendo en cuenta estos datos se puede ver que no hay suficientes proyectos los cuales ayuden a facilitarles la vida a personas en estas condiciones y tampoco se observa un gran apoyo al tema de personas discapacitadas. Cerca del 50% de las personas discapacitadas están cohibidas de las acciones de caminar, correr y saltar, esto conlleva a la falta de oportunidades debido a que en las empresas no ven de mucha utilidad a alguien que está en esta situación. Con relación a las estadísticas de la Organización Mundial de la Salud, se ha observado que son muchas las personas que tienen alguna discapacidad y no pueden realizar diferentes actividades. La mayoría de estas personas (aproximadamente el 90% [1]) todavía cuentan con la posibilidad de ver, por ello la propuesta es que, con este proyecto se pueda mostrar una alternativa de solución para mejorar la situación de estas personas, la cual se llevara a cabo por medio de señales eléctricas emitidas por el movimiento de los ojos. Esto se realizará primero obteniendo las señales de EOG, por medio de circuitos se procesan estas señales y en la parte de programación se leen los datos de cada movimiento que realice el ojo, luego estos datos serán enviados por medio inalámbrico a la plataforma móvil la cual realizará determinada acción..
(4) Estado del arte Bulling et al diseñaron un nuevo dispositivo de rastreo y detección ocular para las aplicaciones HCI (Interfaz Hombre-Computadora) móviles, para ello se pensó cambiar la forma tradicional que se realiza con cámaras de video y utilizar un sistema basado en (Electrooculografia) EOG. Se realizaron unos anteojos con electrodos y un componente de bolsillo con un DSP para el procesamiento en tiempo real, finalmente con el estudio de las pruebas obtenidas se dedujo que la información de actividades del usuario y la actividad que desempeña no se puede adquirir con las modalidades de detecciones actuales. [2] Suman et al desarrollaron un sistema de monitoreo de vigilancia por medio del parpadeo, para ello se pensó tomar datos a varios sujetos y determinar sus parámetros; lo realizado fue que por medio de las señales EOG se verifique y se vigile a las personas durante actividades como conducir, leer, etc., para procesar los datos obtenidos por medio de Matlab, datos como tiempo de parpadeo, tiempo de apertura de los ojos, etc. Finalmente, se dio como resultado una gran diferencia entre las condiciones activa y de somnolencia [3] Bulling A et al implementaron gafas EOG portátiles, consisten en anteojos con electrodos secos integrados en el marco y cuenta con un componente de bolsillo que posee un micro controlador para el procesamiento de la señal EOG para adquirir datos y usar estos datos para determinar cuanta información puede proporcionar el movimiento de los ojos [4] Teja et al diseñaron un sistema de asistencia para personas empleando las señales EOG para escribir un texto usando un teclado virtual. Se realizó con un sistema de adquisición de datos basado en ADS1299 y utilizando o programado por medio de arduino, se diseña una máscara con los electrodos para la toma de los datos, se obtiene como resultado que la precisión es del 100% a una velocidad por letra de 12 segundos [5].
(5) Fecha de envío:. Aungsakul et al diseñaron un receptor de señales EOG para la interfaz hombre computadora HCI en el cual comprueban las ventajas de la interfaz basada en EOG de las tradicionales así mismo haciendo un estudio con 8 sujetos de la variación de la medida de los movimientos de los ojos de diferentes personas dando como conclusión las características útiles para extraer datos en función del movimiento de los ojos. [6] Barea et al diseñaron el control de una silla de ruedas que se mueve por medio de señales EOG para personas con algún tipo de discapacidad o con un alto grado de envejecimiento, el diseño se realizó con una silla de ruedas adaptándole un computador y los sensores necesarios para el procesamiento de las señales el trabajo describe la electrooculografia como una técnica que lego emplean para el diseño del sistema de guiado de sillas EOG. [7] Barea et al diseñan un modelo para la interacción de computadora hombre basada en señales EOG, se propone un nuevo modelo de electrooculografia el cual se diseñará a partir de la transformada wavelet y de las muy conocidas redes neuronales, el resultado del proyecto nos muestra un errores de menos de dos grados durante su uso lo que quiere decir que el sistema es fiable en la detección de movimientos además que este nuevo sistema minimiza los problemas de cansancio por el uso del aparato.[8] Goushia, Geetha S diseñó un sistema de adquisición y de instrumentación biomédica para pacientes con gran nivel de discapacidad como lo son pacientes tetrapléjicos y severamente paralizados con el fin de analizar las aplicaciones que se le pueden dar al procesamiento de las señales EOG y enfatizar la posibilidad de diseñar elementos o maquinas o aparatos para controlar determinadas operaciones que realizaran los pacientes extremamente paralizados. [9].
(6) Chacko et al diseñaron el control de una silla por medio de señales EOG y un microcontrolador La guía y el control se efectúan mediante movimientos de globo ocular dentro del zócalo. El sistema consiste en una silla de ruedas eléctrica estándar con un sistema integrado de microcontrolador. EOG es una nueva tecnología para detectar las señales oculares para los movimientos de los ojos y estas señales se capturan usando electrodos, señales procesadas como amplificación, filtrado de ruido y luego administradas al microcontrolador que impulsa los motores conectados con la silla de ruedas para la propulsión. Esta técnica podría ser muy útil en aplicaciones tales como movilidad para personas discapacitadas y paralizadas. [10] López A et al diseñaron un sistema basado en EOG para el control del mouse, hicieron un estudio sobre la retina y encontraron que esta causa un campo eléctrico alrededor del globo ocular, centrado en el eje óptico y se puede medir colocando electrodos cerca del ojo. Luego implementaron un sistema de adquisición y una aplicación LabVIEW para medir los biopotenciales con el fin de detectar el movimiento de los ojos y proporcionar una posición de mirada relativa para controlar el mouse de una computadora. Por ultimo implementaron varias técnicas para la eliminación del ruido para usarlo en diagnósticos médicos.[11] Zheng M y Gao X quieren implementar un sistema de interacción hombre-computadora para personas con alguna discapacidad física. Para ello diseñaron una interfaz hombrecomputadora que muestra objetos que se repiten moviéndose entre el centro y ocho direcciones alrededor. Al momento de tomar las señales, se eliminaron las interferencias EMG y blink del EOG horizontal y vertical utilizando el procesamiento matemático de la morfología, y luego estas señales EOG se proyectan sobre los vectores de características para detectar las direcciones del movimiento del ojo que correspondía a un objetivo en movimiento. En la prueba se utilizaron 8 personas de las cuales se obtuvo que la taza de información promedio.
(7) Fecha de envío:. fue de 25.7 bits/min de la cual se concluyó que la combinación de la morfología matemática y los métodos de análisis de componentes principales fue factible y efectiva. [12] Lledo et al realizaron una aplicación que permite navegar en internet basada en electrooculografia (EOG) dirigida principalmente para personas discapacitadas que no puedan mover sus brazos, se compone de dos subsistemas que son escritura y navegador. El usuario podrá navegar por internet introduciendo textos, haciendo clic en diferentes elementos y moverse por la pantalla con solo el movimiento de los ojos, incluye también un predictor de palabras para facilitar el uso. Diseñaron un algoritmo EOG capaz de detectar cuatro direcciones diferentes: izquierda, derecha, arriba y abajo, y el parpadeo. En la etapa de prueba se escogieron seis personas sanas las cuales tenían que escribir, buscar y controlar el mouse, y los resultados mostraron que todos podían manipular la aplicación con un tiempo razonable el cual mejoraría con entrenamiento. Concluyeron que la aplicación de navegación en internet puede ser utilizada por personas con discapacidad, mejorando su integración en la sociedad. [13] Postelnicu et al diseñaron una interfaz basada en EOG para propósitos de interfaz de computadora humana (HCI), este proyecto permite solucionar el filtrado de las señales grabadas y la identificación de las amplitudes pico características asociadas con movimientos sádicos, parpadeos o guiños del ojo, se utilizó un clasificador basado en un conjunto de reglas de lógica difusa y un autómata finito determinista, la lectura de estos movimientos se asignaron a seis comandos de bajo nivel para fines de navegación. Para llevarse a cabo se realizó un estudio experimental para verificar la precisión y el rendimiento de la interfaz propuesta comparándola con otras tradicionales, los resultados experimentales muestran que la interfaz desarrollada tiene un buen rendimiento y puede utilizarse para la comunicación y el control en.
(8) línea en sistemas HCI basados en EOG, o incluso para metáforas de navegación en primera persona en la industria de los juegos. [14] Lin M. y Li B diseñaron una interfaz de computadora humana basada en EOG de conexión inalámbrica, para ello se hizo un proceso de adquisición de la señal, filtro y amplificación EOG, utilizando un microcontrolador ARM y un módulo inalámbrico Zigbee. Además, están discutiendo los métodos de reconocimiento de gestos oculares. Tienen pensado implementarlo en personas discapacitadas y en otros campos de diferentes aplicaciones. [15] 2. Desarrollo del tema Se quiso implementar un robot móvil que fuera controlado a través de señales de electrooculografia (EOG), esto con el fin de mostrar que por medio de estas señales se puede llegar a la elaboración de una herramienta que facilitará y dará apoyo a las actividades o tareas específicas que realizan las personas, se desarrolló por medio de una comunicación bluetooth entre dos micro controladores (Psoc 5lp y un pic16f877a), la Figura 1. muestra el diagrama de bloques que se implementó:. Figura 1. Diagrama de bloques.
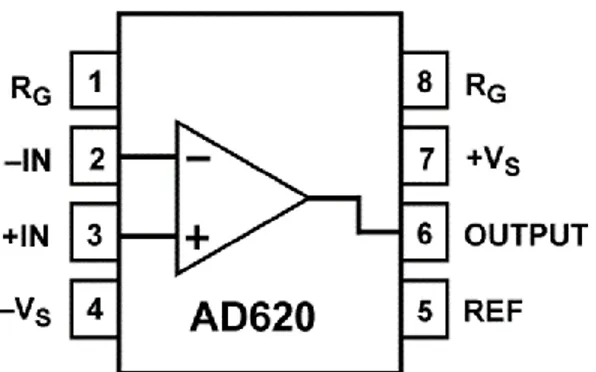
(9) Fecha de envío:. 2.1.1. Adquisición de la señal. Figura 2. Ubicación de los electrodos [16]. Para obtener la señal de los ojos, se utilizaron electrodos de plata/cloruro de plata (Ag/AgCl), los cuales van situados alrededor de los ojos, Figura 2. Estos se encargan de obtener la señal producida por el movimiento de los ojos y llevarla a un circuito amplificador.. 2.1.2. Amplificación. Figura 3. Amplificador de instrumentación AD620 configuración interna. En la Figura 3. Se ve la configuración del amplificador que se utilizó para que la señal obtenida por los electrodos tenga mejor amplitud y poder trabajar sobre ella. Para obtener la ganancia final de esta parte del circuito se implementó la siguiente ecuacion:.
(10) Ec (1). Formula de ganancia AD620. En la Ec (1). Se muestra la ecuación que viene por defecto para calcular la ganancia que se verá reflejada en la señal que le entra al amplificador AD620 (señal EOG). Utilizando la Ec (1). observamos que entre más pequeña la resistencia utilizada, la ganancia obtenida seria mayor, por ende, utilizamos una resistencia de 100Ω obteniendo así una ganancia de 495 veces. 𝐺=. 49,4𝑘Ω + 1 = 495 100Ω. 2.1.3. Filtrado. Figura 4. Amplificador operacional LM324. En la Figura 4. Se observa el circuito integrado utilizado para la etapa de filtrado, se utilizó este componente ya que contaba en su configuración con cuatro (4) amplificadores, la señal EOG se caracteriza por manejar frecuencias muy bajas que varían entre los 0.5Hz y los 50Hz, por ello se necesitaba un filtro pasa altos con una frecuencia de corte de 0.5Hz, un filtro pasa bajos con frecuencia de corte 40Hz (se realizó para frecuencias menores a los.
(11) Fecha de envío:. 40Hz para obtener un mejor rango de la señal obtenida) y adicional se implementó un amplificador al final del ultimo filtro con una ganancia aproximada de 100 veces, para así garantizar un mejor acondicionamiento de la señal.. Figura 5. Etapa de filtrado [17]. Para el filtro pasa altas, se emplearon las Ec (2). y Ec (3).: 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒𝑠 𝑑𝑒 𝐵𝑒𝑠𝑠𝑒𝑙 ∶ 𝛼 = 1,3617 ; 𝛽 = 0,6180 𝐶1&2 =. 10(1𝑥10−6) 0,5ℎ𝑧. = 33𝜇𝐹. 𝛼. Ec (2). 1,3617. 𝑅1 = 4𝜋𝐶𝑓 𝛽 = 4∗𝜋∗33𝜇∗0,5ℎ𝑧∗0,618 ≅ 17,711𝑘𝛺 ≅ 17𝑘𝛺 𝑐. 𝑅2 =. Ec (3). 1 1 = ≅ 23,612𝑘𝛺 ≅ 23,6𝑘𝛺 𝜋𝑓𝑐 𝛼𝐶 𝜋 ∗ 0,5ℎ𝑧 ∗ 1,3617 ∗ 33𝜇. Para el filtro pasa bajas, se realizaron los siguientes cálculos empleando la Ec (4) y Ec (5): 𝐶1 = 𝐶2 ≥. 10(1𝑥10−6) 40ℎ𝑧 4𝛽𝐶1 𝛼2. 𝑅1&2 =. = 250𝑛𝑓 → 220𝑛𝑓. → 𝐶2 ≥. 4(0,6180)(250𝑛𝑓) (1,3617) 2. 𝛼𝐶2 ±√𝛼2 𝐶2 2 −4𝐶1 𝐶2 𝛽 4𝜋𝐶1 𝐶2 𝑓𝑐. ≥ 333𝑛𝑓 → 330𝑛𝑓. Ec (5). Ec (4).
(12) 𝑅1 = 11,429𝑘Ω → 11,4𝑘Ω 𝑅2 = 10,242𝑘Ω → 10,2𝑘Ω 2.1.4. Programación Para la parte de la programación se utilizó una Psoc5 y un Pic16f877a, la señal EOG obtenida luego de haber pasado por la etapa de amplificación y filtrado entrara en la Psoc, llegará a un ADC, convirtiendo así esta señal análoga en digital y haciendo una comparación de datos enviara según sea el caso el dato por medio de comunicación Bluetooth al Pic 16f877a. Los siguientes son los códigos implementados en cada uno de los microcontroladores:. Figura 6. Código implementado en la Psoc5.
(13) Fecha de envío:. Figura 7. Código Implementado en el Pic16f877a. 2.1.5. Comunicación. Figura 8. Módulos Bluetooth. La plataforma móvil consta de un pic16f877a, por medio de comunicación bluetooth recibirá los datos enviados por la Psoc, esta comunicación cuenta con dos módulos bluetooth HC-05, los cuales se configuraron para funcionar uno como maestro y el otro como esclavo, garantizando así la comunicación únicamente entre estos dos (Figura 8). Cuando el pic recibe.
(14) los datos enviados de la Psoc, se realiza una comparación que determina el movimiento que efectuara la plataforma, se puede mover en los ejes X y Y libremente y parar si no hay movimiento de los ojos. Esta programación se puede observar en la Figuras 6. y Figura 7. Por otro lado, para la configuración de los módulos bluetooth HC-05, se realizó por medio de unos comandos AT que van directamente a cada módulo, a continuación, se aprecia los comandos que se utilizaron. Comandos AT para módulo HC-05 El módulo HC-05 viene por defecto configurado de la siguiente forma: - Modo o role: Esclavo - Nombre por defeco: HC-05 - Código de emparejamiento por defecto: 1234 - La velocidad por defecto (baud rate): 9600 Para poder configurar los módulos existen dos formas de conexión, el modo AT 1 y AT 2, para este caso se utilizó el modo AT 2.. Modo AT 1 . Para entrar a este estado después de conectar y alimentar el modulo es necesario presionar el botón del HC-05.. . En este estado, podemos enviar comandos AT, pero a la misma velocidad con el que está configurado.. . EL LED del módulo en este estado parpadea rápidamente igual que en el estado desconectado. [18].
(15) Fecha de envío:. Modo AT 2 . Para entrar a este estado es necesario tener presionado el botón al momento de alimentar el modulo, es decir el modulo debe encender con el botón presionado, después de haber encendido se puede soltar y permanecerá en este estado.. . En este estado, para enviar comandos AT es necesario hacerlo a la velocidad de 38400 baudios, esto es muy útil cuando nos olvidamos la velocidad con la que hemos dejado configurado nuestro modulo.. . EL LED del módulo en este estado parpadea lentamente. [18]. Configuración modulo Maestro. Figura 9. Se puede apreciar la configuración realizada al módulo “Maestro” [18].
(16) Configuración modulo Esclavo. Figura 10. Se puede apreciar la configuración realizada al módulo “Esclavo” [18]. En la Figura 9. y Figura 10. Se puede observar cómo fue la configuración para que los dos módulos se conecten entre si apenas estos estén alimentados. 2.1.6. Plataforma móvil En la plataforma se implementó un circuito que consta del Pic16f877a sobre el cual se programó con el código de la Figura 7., dos motores y un circuito integrado L293D (Puente h, Figura 11.), el cual es el encargado de dar el sentido de giro a los motores, este depende del comando recibido en el PIC y el cual le llegara a él. En la siguiente parte se observa la configuración del circuito integrado (L293D), este funciona con un voltaje que varía de 4.5V a 36V, pero para este caso se alimentara con 9v.. Figura 11. Configuración Puente H L293D..
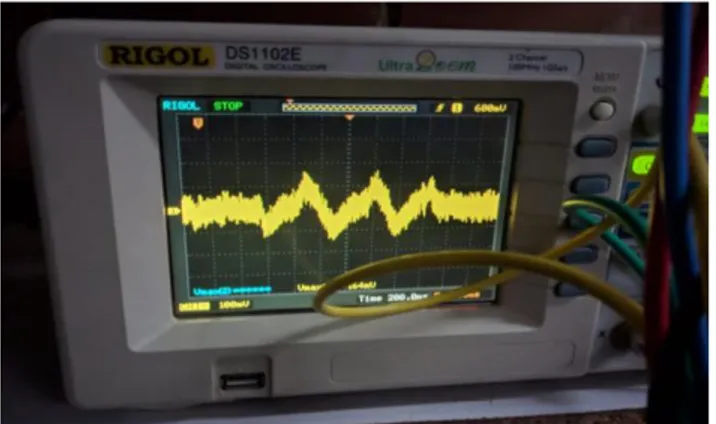
(17) Fecha de envío:. 2.2. Resultados. Figura 12. Ubicación de los electrodos en la persona. En la Figura 12. Se observa la ubicación correcta de los electrodos en el rostro de la persona, se debe tener en cuenta la posición de cada uno porque si estos no están bien ubicados el dato obtenido puede ser erróneo.. Figura 13. Señal EOG con el amplificador de instrumentación AD620. En la Figura 13. se puede observar la señal que se obtuvo con el amplificador de instrumentación AD620, al realizar los respectivos movimientos del ojo. Se puede observar cómo se generan picos de voltaje positivos cuando se realiza movimiento hacia la derecha y negativos hacia la izquierda, igualmente cuando se realiza movimiento hacia arriba y abajo..
(18) Figura 14. Circuito utilizado para la obtención y procesamiento de la señal EOG.. En la Figura 14. Se puede apreciar el circuito implementado para obtener la señal por medio de un amplificador de instrumentación y un filtro pasa banda. [17]. Figura 15. Señal EOG después de usar un filtro pasa banda.. Se puede ver como la señal mejora al pasar por el filtro pasa banda, conformado por un filtro pasa alto con frecuencia de corte 0.5Hz y uno pasa bajos de frecuencia de corte 40Hz, como se aprecia en la Figura 15.. Figura 16. Desplazamiento de la tierra a un nivel de 2v.
(19) Fecha de envío:. En la Figura 16. se muestra el circuito que se utilizó para el respectivo desplazamiento de la tierra de 0v a 2v. esto con el fin de que los voltajes obtenidos en la señal EOG pueda ser leída sin problema por la Psoc.. Figura 17. Señal obtenida luego de subir la tierra a un nivel de 2v aprox. (Izq. y Der.). Figura 18. Movimiento arriba y abajo. En la Figura 17. Y Figura 18. se observa la señal obtenida al mover los ojos hacia las 4 posiciones, luego de tener la señal por encima de 0v y en la Figura 19 se evidencia el envió de datos según el movimiento de los ojos..
(20) Figura 19. Envió de datos según el movimiento.. Teniendo en cuanta la programación implementada, se observa el desplazamiento del robot según el tiempo que mantenga el movimiento de los ojos en vertical Tabla 1. para girar el robot podemos observar que enviando un pulso de movimiento en horizontal girara 90º se puede observar en la Figura 20. Tiempo(seg). Desplazamiento aprox(cm). 1. 43. 2. 85. 3. 126. 4. 169. 5. 212. Tabla 1. Desplazamiento vs tiempo.
(21) Fecha de envío:. Figura 20. Giro del robot (posición inicia, izquierda, derecha). 3 Conclusiones . La señal obtenida por los ojos se encuentra en el rango de los micro voltios lo cual es su principal característica por ser una señal de baja amplitud y frecuencia, por este motivo se utiliza un amplificador de instrumentación para que la señal se pueda trabajar y/o manipular.. . Las frecuencias en las que oscila la señal EOG están entre el rango de los 0.5Hz a los 40Hz y se debe tener cuidado con el ruido de la fuente.. . Se observó que el pulso generado por el movimiento de los ojos en el eje positivo (derecha y arriba) tiene mayor amplitud que los pulsos negativos (izquierda y abajo).. . La ubicación de los electrodos alrededor de los ojos es un punto clave, ya que, si estos no son ubicados de manera correcta, están sucios los electrodos o la superficie, se está en contacto con superficies metálicas, puede fallar la adquisición de la señal.. . Se utilizaron baterías como fuente ya que estas dan una mejor calidad en la señal obtenida reduciendo en gran manera el ruido que se filtra..
(22) Referencias [1]. Ministerio de salud y protección social, “Sala situacional de Personas con Discapacidad,” p. 56, 2015.. [2]. A. Bulling, D. Roggen, and G. Tröster, “It’s in Your Eyes: Towards Context-Awareness and Mobile HCI Using Wearable EOG Goggles,” Proc. 10th Int. Conf. Ubiquitous Comput. (UbiComp ’08), 2008.. [3]. D. Suman, M. Malini, and S. Anchuri, “EOG based vigilance monitoring system,” in 12th IEEE International Conference Electronics, Energy, Environment, Communication, Computer, Control: (E3-C3), INDICON 2015, 2016.. [4]. A. Bulling, D. Roggen, and G. Tröster, “Wearable EOG goggles,” in Proceedings of the 27th international conference extended abstracts on Human factors in computing systems - CHI EA ’09, 2009.. [5]. S. S. S. Teja, S. S. Embrandiri, N. Chandrachoodan, and R. Reddy M., “EOG based virtual keyboard,” in 2015 41st Annual Northeast Biomedical Engineering Conference, NEBEC 2015, 2015.. [6]. S. Aungsakul, A. Phinyomark, P. Phukpattaranont, and C. Limsakul, “Evaluating feature extraction methods of electrooculography (EOG) signal for human-computer interface,” in Procedia Engineering, 2012.. [7]. R. Barea, L. Boquete, M. Mazo, and E. López, “Wheelchair guidance strategies using EOG,” J. Intell. Robot. Syst. Theory Appl., 2002.. [8]. R. Barea, L. Boquete, S. Ortega, E. López, and J. M. Rodríguez-Ascariz, “EOG-based eye movements codification for human computer interaction,” Expert Syst. Appl., 2012.. [9]. G. S. Goushia, “Assistance for disabled through EOG,” Middle - East J. Sci. Res., 2014..
(23) Fecha de envío:. [10] J. K. Chacko, D. Oommen, K. K. Mathew, N. Sunny, and N. Babu, “Microcontroller Based EOG Guided Wheelchair,” Int. J. Medical, Heal. Biomed. Bioeng. Pharm. Eng., 2013. [11] A. López, P. J. Arévalo, F. J. Ferrero, M. Valledor, and J. C. Campo, “EOG-based system for mouse control,” in Proceedings of IEEE Sensors, 2014. [12] M. M. Zheng and X. R. Gao, “Research of speller system based on EOG,” Chinese J. Biomed. Eng., 2012. [13] L. D. Lledó, A. Úbeda, E. Iáñez, and J. M. Azorín, “Internet browsing application based on electrooculography for disabled people,” Expert Syst. Appl., 2013. [14] C. C. Postelnicu, F. Girbacia, and D. Talaba, “EOG-based visual navigation interface development,” Expert Syst. Appl., 2012. [15] M. Lin and B. Li, “A wireless EOG-based human computer interface,” in Proceedings 2010 3rd International Conference on Biomedical Engineering and Informatics, BMEI 2010, 2010. [16] O. Javier, O. Murillo, G. R. Fuentes, F. Jiménez López, and E. Electrooculograma, “Diseño e Implementación de un Sistema de Control de Movimientos para una plataforma Móvil usando ElectroOculografía 2. ORIGEN Y OBTENCIÓN DEL EOG 2.1 Origen de la Señal EOG,” 2004. [17] O. M. Alberto Abaroa, Barack Guerrero, Fernanda Tapia, “Electrooculógrafo ( EOG ),” ResearchGate, no. November, pp. 0–6, 2016. [18] T-BEM,. “Modulo. Bluetooth. serial. HC-05.”. http://teslabem.com/modulo-bluetooth-serial-hc-05.html.. [Online].. Available:.
(24)
Figure

![Figura 5. Etapa de filtrado [17] Para el filtro pasa altas, se emplearon las Ec (2). y Ec (3).:](https://thumb-us.123doks.com/thumbv2/123dok_es/7264446.344982/11.918.202.716.228.440/filtrado-emplearon-.webp)

+7

![Figura 10. Se puede apreciar la configuración realizada al módulo “Esclavo” [18]](https://thumb-us.123doks.com/thumbv2/123dok_es/7264446.344982/16.918.399.519.923.1047/figura-puede-apreciar-configuración-realizada-módulo-esclavo.webp)



Documento similar
El quincenario de los frailes de Filipinas, condena para el Archipiélago los propósitos de nivelación jurídica que para todo territorio español, peninsular o ultramarino, se
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Relativamente simple. Este sistema se basa en un par de ruedas motrices y una única rueda directriz. El diseño generalmente es triangular. No es necesario el control de la
Hacer una arquitectura de control para las tareas de Alcance y Agarre representa una oportunidad para centrarse en los problemas de control para manipular objetos;
En este grupo se encuentran los Robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
