INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA Dirección de Estudios de Posgrado e Investigación
“Diseño de una Máquina para
Estibar Automóviles”
T E S I S
QQUUEE PPAARRAA OOBBTTEENNEERR EELL GGRRAADDOO DDEE
MAESTRO EN CIENCIAS
Con especialidad en Ingeniería Mecánica
P R E S E N T A :
ING. ADOLFO ANAYA RUIZ
Director M. en C. Cándido Palacios Montufar
D E D I C A T O R I A S
Manifiesto mi más sincero agradecimiento al INSTITUTO POLITÉCNICO NACIONAL crisol de la técnica y desarrollo industrial de nuestro país, a la Sección de Estudios de Postgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica, al Programa de Actualización del Personal Docente del I.P.N. promovido por la Secretaría Académica del mismo por el apoyo incondicional recibido para el logro de mis metas de superación académica y personal.
Al M. en C. Cándido Palacios Montufar quien generosa y pacientemente me permitió abrevar en su saber y guió el desarrollo de este trabajo.
Al Dr. Luis Héctor Hernández Gómez, al M. en C. Gabriel Villa y Rabasa por su valioso tiempo dedicado a la revisión del presente trabajo.
Mi más sincero respeto y admiración para los señores profesores de esta sección, quienes sin limitación compartieron sus conocimientos con quienes tuvimos la suerte de asistir a sus exposiciones:
Dedico los frutos de este esfuerzo
a mi querida esposa Beatriz Hernández Corona a mis amados hijos Leticia, Armando y Adolfo a mis nietos:
i
ÍNDICE GENERAL
ÍNDICE DE TABLAS v
ÍNDICE DE FIGURAS vi
SIMBOLOGÍA ix
HIPÓTESIS DE LA TESIS xxii
RESUMEN xxiii ABSTRACT xxiv JUSTIFICACIÓN xxv
METAS xxvii INTRODUCCIÓN xxix
ESTADO DEL ARTE xxxi
REFERENCIAS xxxii
CAPÍTULO 1 1
CAPÍTULO 2 7
CAPÍTULO 3 48
CAPÍTULO 4 124
CAPÍTULO 5 164
CONCLUSIONES Y RECOMENDACIONES 170
ANEXO 1 173
ANEXO 2 179
CAPÍTULO 1
METODOLOGÍA DEL DISEÑO
1.1. Planteamiento y justificación del problema o necesidad 1
1.2. Comprensión del problema e investigación detallada. 2
1.3. Alcance o Límites del Proyecto. 2
1.4. Determinación de Especificaciones. 3
1.5 Lluvia y síntesis de ideas de posibles conceptos para la solución del problema.
3
1.6. Análisis y evaluación de conceptos. 3
1.7. Selección del concepto considerado como el más óptimo. 4
1.8. Diseño conceptual. 5
1.9. Diseño de detalle. 5
1.10 Fabricación del prototipo 5
1.11 Sumario 6
1.12 Referencias 6
CAPÍTULO 2
DESARROLLO DE LA METODOLOGÍA DEL DISEÑO
2.1. Planteamiento del problema. 7
2.2 Investigación detallada 8
2.3. Declaración de los límites y alcance del proyecto. 8
2.4 Relación Del sistema con el entorno 8
2.5. Determinación de especificaciones. 8
2.5.1. Identificación del cliente. 8
2.5.2. Requerimientos de calidad del cliente. 9
2.5.3. Requerimientos abreviados de calidad. 13
2.5.4. Traducción de los requerimientos no mensurables del cliente a términos mensurables
14
2.6. Generación y evaluación de conceptos de diseño 15
2.6.1. Lluvia de ideas 15
2.6.2. Selección y verificación de la propuesta 16
2.6.3. Estudio comparativo 17
2.6.4. Fijación de las metas de diseño. 19
2.7. Diseño conceptual 21
2.7.1. Análisis y evaluación de los conceptos para mecanismos de elevación 22
2.7.2. Definición de la función global 22
2.7.2.A Descomposición funcional 22
2.7.3. Construcción del árbol de funciones 25
2.7.4. Combinación de opciones de conceptos 27
2.7.5. Evaluación de conceptos de diseño 37 2.7.6. Evaluación relativa de las combinaciones de opciones de conceptos para
funciones en base a los requerimientos deseables 39
2.7.7. Evaluación de conceptos para funciones a partir de filtros de selección. 40
2.8. Síntesis de la máquina. 43
2.9. Características constructivas 44
2.10. Referencias 47
CAPÍTULO 3
SÍNTESIS CINEMÁTICA, ANÁLISIS DE CARGAS Y DIMENSIONAMIENTO
3.1. Introducción de los alcances del contenido del capítulo 48
3.2. Descripción del arreglo general y funcionamiento de la máquina. 48
3.3. Funcionamiento 51
3.4. Análisis cinemático. 52
3.5. Selección del mecanismo comercial de elevación. 53
iii
3.6. Análisis de las cargas. 60
3.6.1. Descripción del problema del análisis de cargas 61
3.7. Dimensionamiento de la máquina y análisis estructural 64
3.7.1. Diseño de la plataforma 65
3.7.2. Cálculo de las rigideces de los elementos 66
3.7.3. Cálculo de los tramos exteriores y centrales de las pistas de rodadura 69
3.7.4. Propiedades de las secciones transversales de la estructura de la plataforma 72
3.7.5. Cálculo de largueros exteriores y centrales 73
3.7.6. Cálculo de travesaños centrales 78
3.8. Diseño de las columnas 81
3.8.1 Diseño de las columnas por resistencia a la flexión 82
3.8.2. Diseño de las columnas por resistencia a la torsión 85
3.8.3. Esfuerzos equivalentes en las columnas 86
3.8.4. Resistencia de las columnas al pandeo 86
3.8.5. Rigidez lateral lineal de las columnas 89
3.8.6. Rigidez lateral angular de las columnas 90
3.8.7. Rigidez transversal de las columnas 91
3.9. Diseño de las botas de empotre de la plataforma 93
3.9.1. Diseño de la bota por resistencia a la flexión 95
3.9.2. Diseño de la bota por corte directo 96
3.9.3. Diseño de la bota por resistencia a la torsión 96
3.9.4. Esfuerzo equivalente en la bota de empotre 97
3.9.5. Diseño de la bota de empotre por rigidez lateral lineal 97
3.9.6. Diseño de la bota por rigidez transversal 98
3.10. Cálculo de uniones soldadas 99
3.10.1. Uniones soldadas de los travesaños centrales con sus placas de empotre a la bota.
99
3.10.2 Uniones soldadas en las bridas de sujeción de las botas. 103
3.11. Diseño de las placas de conexión de la plataforma con las tuercas de bolas de los tornillos de potencia de los mecanismos de elevación.
108
3.11.1. Cálculo por corte de las placas de conexión de la plataforma con los tornillos de potencia
109
3.11.2. Cálculo de las placas de conexión de la plataforma con los tornillos de potencia por aplastamiento
110
3.12. Selección de los cojinetes de rodamiento. 110
3.13. Cálculo de tornillos de sujeción. 111
3.13.1. Tornillos de sujeción para unir las bridas de conexión de las botas con los
soportes de la plataforma. 112
3.13.2. Tornillos de sujeción para unir las placas de conexión de los travesaños centrales de la plataforma con las tuercas de los tornillos de los mecanismos de elevación.
117
3.14 Cimentación de la máquina 121
3.15 Sumario 122
3.15 Referencias 123
CAPÍTULO 4
ANÁLISIS DINÁMICO Y DE ESTABILIDAD
4.1. Modelación del sistema 124
4.2. Abstracción física. 125
4.3. Sistema equivalente. 125
4.4. Determinación de las constantes físicas y parámetros para las ecuaciones de los modos de vibración del sistema
127
4.4.1. Modos de vibración que pueden presentarse 128
4.5. Vibración vertical libre 128
4.5.1. Formulación matemática 128
4.5.2. Solución de la ecuación 131
4.6. Vibración libre con amortiguamiento viscoso 132
4.6.1. Formulación matemática 132
4.6.2. Solución de la ecuación diferencial 133
4.7. Vibración libre con amortiguamiento Coulomb 138
4.7.1. Formulación matemática 139
4.8. Vibración forzada con amortiguamiento viscoso 142
4.8.1. Formulación matemática 142
4.8.2. Solución de la ecuación diferencial 143
4.8.3. Trabajo por ciclo desarrollado por la fuerza perturbadora 149
4.9. Vibración forzada con amortiguamiento Coulomb y otras clases de
amortiguamiento 153
4.9.1. Formulación matemática 154
4.9.2. Solución de la ecuación mediante el método energético 154
4.10. Estabilidad del sistema 159
4.10.1. Formulación matemática 159
4.10.2. Solución de la ecuación 159
4.11. Evaluación de los parámetros del sistema 161
4.12. Conclusión 163
CAPÍTULO 5 ANÁLISIS ECONÓMICO
5.1.1. Costo de fabricación 164
5.1.2. Valor presente neto de la inversión 167
5.1.3. Rendimiento de la inversión 168
5.1.4. Período de tiempo para la recuperación del capital 169
v
CONCLUSIONES, RECOMENDACIONES FINALES Y TRABAJO FUTURO
1. Conclusiones y recomendaciones finales 170
2. Trabajo a futuro 172
ÍNDICE DE TABLAS
Tabla Descripción Página
C A P Í T U L O 1
2.1 Listado de requerimientos de calidad clasificados en obligatorios y deseables 13
2.2 Traducción de los requerimientos no mesurables del cliente 14
2.3 Ponderación de requerimientos deseables 14
2.4 Listado de requerimientos deseables en orden descendente de importancia 15
2.5 Fabricantes de máquinas estibadoras de automóviles 18
2.6 Principales características de cuatro máquinas estibadoras comerciales 18
2.7 Estudio comparativo de cinco modelos de máquinas 18
2.8 Despliegue de funciones de calidad 20
2.9 Cuatro opciones de conceptos para funciones primarias 27
2.10 Seis opciones de conceptos para funciones secundarias 28
2.11 Cinco opciones de conceptos para funciones terciarias 28
2.12 Tres opciones de conceptos para funciones cuaternarias 29
2.13 Cuatro opciones de conceptos para funciones primarias 29
2.14 Seis opciones de conceptos para funciones secundarias 29
2.15 Cinco opciones de conceptos para funciones terciarias 30
2.16 Tres opciones de conceptos para funciones cuaternarias 30
2.17 Cuatro opciones de conceptos para funciones primarias 30
2.18 Seis opciones de conceptos para funciones secundarias 31
2.19 Cinco opciones de conceptos para funciones terciarias 31
2.20 Tres opciones de conceptos para funciones cuaternarias 32
2.21 Cuatro opciones de conceptos para funciones primarias 32
2.22 Seis opciones de conceptos para funciones secundarias 32
2.23 Cinco opciones de conceptos para funciones terciarias 33
2.24 Tres opciones de conceptos para funciones cuaternarias 33
2.25 Cuatro opciones de conceptos para funciones primarias 33
2.26 Seis opciones de conceptos para funciones secundarias 34
2.27 Cinco opciones de conceptos para funciones terciarias 34
2.28 Tres opciones de conceptos para funciones cuaternarias 34
2.29 Cuatro opciones de conceptos para funciones primarias 35
2.30 Seis opciones de conceptos para funciones secundarias 35
2.31 Cinco opciones de conceptos para funciones terciarias 36
2.32 Tres opciones de conceptos para funciones cuaternarias 36
2.33 Evaluación de conceptos de diseño 38
2.34 Matriz de decisiones (método Pugh) 39
2.35 Relación entre funciones primarias y conceptos en la evaluación en base a
filtros de selección 41
2.36 Relación entre conceptos y funciones 42
C A P Í T U L O 3
3.1 Especificaciones del actuador de tornillo de bolas 58
3.2 Tabulación de los factores “C” para el freno del motor 59
3.3 Vida mínima esperada de los mecanismos de la serie 2800 59
3.4 Peso de la plataforma 78
3.5 Resumen de los componentes estructurales que forman el bastidor 120
C A P Í T U L O 5
5.1. Pesos y costos de componentes 164
5.2. Ingresos y desembolsos futuros 168
ÍNDICE DE FIGURAS
Fig. No Descripción Página
C A P Í T U L O 2
2.1 Descomposición funcional 22
2.2 Árbol de funciones desplegado 26
2.3 Arreglo esquemático de la máquina estibadora de automóviles 45
2.4 Arreglo general de la máquina en operación 46
C A P Í T U L O 3
3.1 Dibujo esquemático de la máquina estibadora 49
3.2 Desplazamiento del CG de la masa del automóvil 52
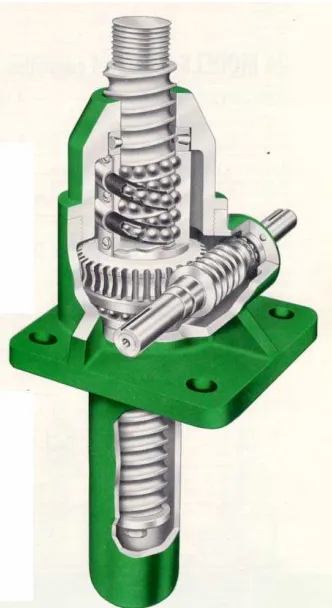
3.3 Mecanismo de elevación (tornillo de potencia de bolas) 54
3.4 Dibujo dimensional del mecanismo de elevación (actuador) 55
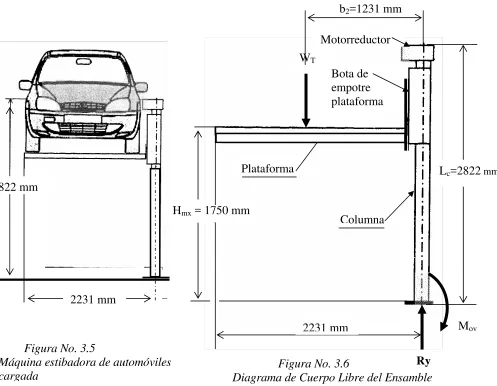
3.5 Máquina estibadora de automóviles cargada 62
3.6 Diagrama de cuerpo libre del ensamble 62
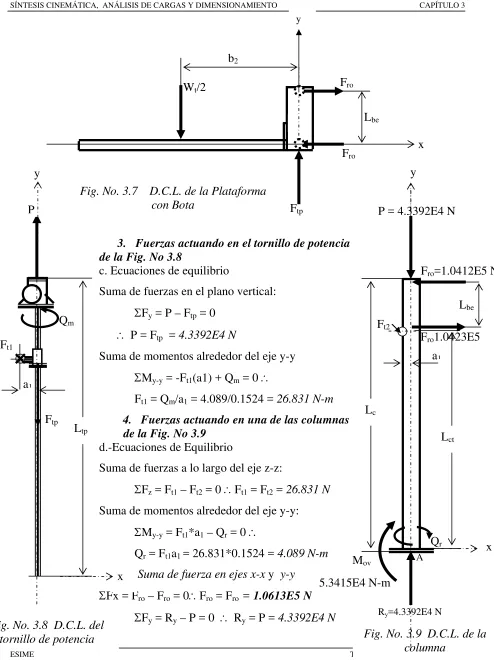
3.7 Diagrama de cuerpo libre de la plataforma con bota de empotre 63
3.8 Diagrama de cuerpo libre del tornillo de potencia 63
3.9 Diagrama de cuerpo libre de la columna 63
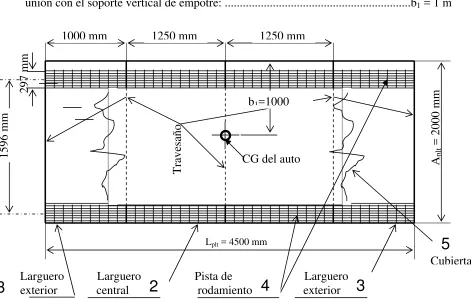
3.10 Estructura de la plataforma 65
3.11 Pista de rodamiento 69
vii
3.14 Sección transversal de la estructura de la plataforma en el sentido transversal (vista de lado de la plataforma)
72
3.15 Sección transversal de la estructura de la plataforma en sentido longitudinal (vista de frente de la plataforma)
72
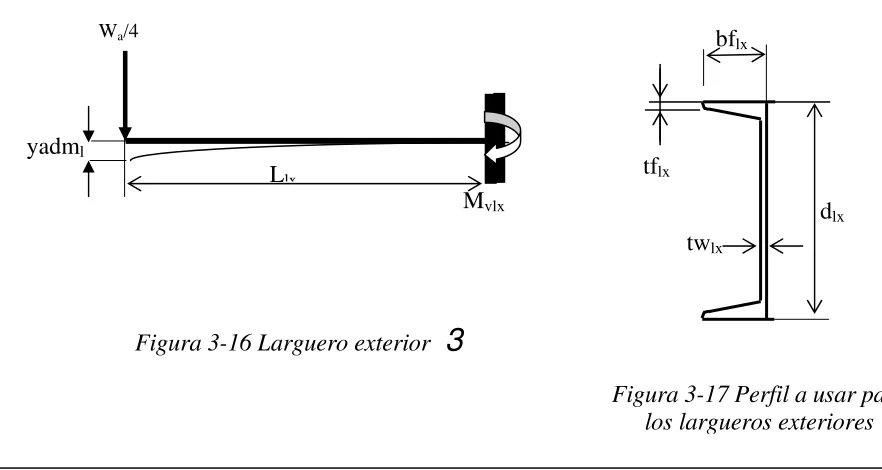
3.16 Larguero exterior 73
3.17 Perfil a usar para los largueros exteriores 73
3.18 Larguero central 74
3.19 Diagrama de cuerpo libre de la canal de la estructura bajo fuerza sísmica 76
3.20 Diagrama de cuerpo libre del travesaño central 78
3.21 Perfil de doble canal a usar para los travesaños centrales 78
3.22 Columna bajo la acción de carga gravitacional y fuerza sísmica plano
lateral 82
3.23 Diagrama de cuerpo libre de la columna bajo carga gravitacional y fuerza sísmica en el plano lateral
82
3.24 Sección transversal de la columna 85
3.25 Columna bajo la acción de carga gravitacional y fuerza sísmica en el plano frontal
90
3.26 Diagrama de cuerpo libre de la columna bajo carga gravitacional y fuerza sísmica en el plano frontal
90
3.27 Columna bajo la acción de carga gravitacional y fuerza sísmica en el plano
frontal 92
3.28 Diagrama de cuerpo libre de la columna bajo carga gravitacional y fuerza sísmica en el plano frontal
92
3.29 Vista lateral de la bota de empotre 94
3.30 Diagrama de cuerpo libre de la bota de empotre de la plataforma 94
3.31 Diagrama de cuerpo libre del ensamble bota-plataforma 94
3.32 Sección transversal de la bota de empotre 95
3.33 Detalles de los cojinetes de empotre 95
3.34 Análisis de la junta soldada para unir los travesaños centrales con la placa de empotre a atornillar en la bota de empotre
100
3.35 Diagrama de Goodman para la junta soldada de los travesaños centrales
con sus soportes
101
3.36 Análisis de la junta soldada en las bridas de sujeción de la bota con la placa de empotre de los travesaños centrales
104
3.37 Diagrama de Goodman de junta soldada de las bridas de la bota 106
3.38 Detalle de la placa de conexión entre el tornillo del mecanismo de elevación y los canales centrales de la plataforma
108
3.39 Diagrama de cuerpo de la placa de conexión de la plataforma 109
3.40 Diagrama de cuerpo libre de la brida de conexión 109
3.41 Rodillo de leva a usar como cojinete de rodamiento en la bota de empotre 110
3.42 Diagrama de cuerpo libre del subensamble formado por las bridas de la
bota, soporte de la plataforma y tornillos de sujeción
112
3.43 Tornillo de sujeción a corte directo 113
3.44 Área de los elementos sujetos 114
3.45 Diagrama de Goodman para el comportamiento de esfuerzos variables en
los tornillos de sujeción t-1
116
3.46 Detalle de la junta atornillada para unir los canales centrales de la plataforma con el tornillo de bolas del mecanismo de elevación
117
3.47 Diagrama de Goodman para el comportamiento de esfuerzos variables en
los tornillos de sujeción t-2 120
3.48 Diagrama de cuerpo libre de la columna empotrada en cimentación de
concreto, bajo carga gravitacional y sísmica, en plano lateral
121
C A P Í T U L O 4
4.1 Modelando la estructura de la máquina estibadora para el análisis de vibraciones con un solo grado de libertad en el plano lateral
126
4.2 Deflexión estática en cualquier punto de las columnas 127
4.3 Modelado del sistema resorte-masa-amortiguador en vibración libre con
amortiguamiento viscoso
132
4.4 Representación gráfica del primer término de la ecuación (4.11) 135
4.5 Representación vectorial de la ecuación (4.11) 137
4.6 Modelación del sistema vibrando libremente con amortiguamiento
Coulomb 139
4.7 Representación vectorial de un movimiento armónico 141
4.8 Modelado del sistema resorte-masa-amortiguador y diagrama de cuerpo
libre
142
4.9 Representación vectorial de la ecuación (c) 144
4.10 Factor de amplificación para el sistema resorte-masa-amortiguador viscoso 146
4.11 Ängulo de fase entre el movimiento y la fuerza perturbadora del sistema
resorte-masa-amortiguador viscoso 148
4.12 Variación del factor γ/(4z2+γ) para tres valores de γ 151
4.13 Superposición de respuestas transitoria y forzada permanente 152
4.14 El fenómeno de la pulsación o latido al combinarse dos frecuencias
cercanas 153
4.15 Valores del factor de amplificación contra relación de frecuencias ωf/ωn
para diferentes valores de f/Wt
156
4.16 Valores de la amplitud finita 157
ESIME TESIS DE MAESTRÍA AAR 2001
ix
S I M B O L O G Í A
Símbolo Definición Unidades SI
α Ángulo, ángulo de fase, diferencia de fase, deflexión angular de la
columna y de a plataforma, dirección de un vector
grados o radianes
α1lc Desplazamiento angular del extremo libre de la columna en el plano
lateral producido por el momento concentrado a la distancia a del extremo libre
grados
α2lc Desplazamiento angular del extremo libre de la columna en el plano
lateral producido por la fuerza sísmica grados
αfs Desplazamiento angular del extremo libre de la columna en el plano
frontal producido por la fuerza sísmica grados
αtlc Desplazamiento angular total del extremo libre de la columna en el
plano lateral
grados
γ Relación 2n/ωn
∆Rp Vector desplazamiento m
∆T Cambio de energía cinética N-m/s
∆t Intervalo de tiempo s
δc Deflexión lateral de l columna m
δp Deflexión lateral de la plataforma m
η Eficiencia
ν Relación de Poison
θadmbe Deformación angular transversal admisible en la bota de empotre. grados
θadmc Deformación angular admisible en la columna grados
θbe Deformación angular transversal de la bota de empotre por fuerza
sísmica grados
θc Deformación angular en la sección trasversal de la columna grados
µ Peso por unidad de longitud N/m
σ Esfuerzo normal de flexión o de aplastamiento Mpa
σ3mx Esfuerzo de flexión máximo de la columna en el plano frontal por
fuerza sísmica
Mpa
σa Esfuerzo alternante en el material Mpa
σaf Esfuerzo alternante de falla en el material Mpa
σat Esfuerzo alternante en el tornillo de sujeción Mpa
σbe1 Esfuerzo máximo por flexión en el plano lateral de la bota de
empotre por carga gravitacional Mpa
σbe2 Esfuerzo máximo por flexión en el plano frontal de la bota de
empotre por fuerza sísmica
σeb1 Esfuerzo equivalente Von Mises en el plano frontal de la bota de
empotre por carga gravitacional y fuerza sísmica
Mpa
σec1 Esfuerzo equivalente Von Mises en la columna en el plano frontal
por carga gravitacional y fuerza sísmica
MPa
σec2 Esfuerzo equivalente Von Mises en la columna en el plano frontal
por fuerza sísmica
Mpa
σelc Esfuerzo equivalente Von Mises en el tramo central del larguero Mpa
σelx Esfuerzo equivalente Von Mises en el tramo exterior del larguero Mpa
σhlc Esfuerzo de flexión en el tramo central del larguero por carga sísmica Mpa
σhlx Esfuerzo de flexión en el tramo exterior del larguero por carga
sísmica Mpa
σhtc Esfuerzo de flexión en el travesaño central por fuerza sísmica Mpa
σm Esfuerzo medio Mpa
σmt Esfuerzo medio en el tornillo de sujeción Mpa
σmw Esfuerzo medio en el cordón de soldadura Mpa
σprc Esfuerzo de flexión en tramo central de la pista de rodadura Mpa
σprx Esfuerzo de flexión en tramo exterior de la pista de rodadura Mpa
σvlc Esfuerzo de flexión en el tramo central del larguero por carga
gravitacional
Mpa
σvlx Esfuerzo de flexión en el tramo exterior del larguero por carga
gravitacional
Mpa
σvtc Esfuerzo de flexión en el travesaño central por carga gravitacional Mpa
σw Esfuerzo de flexión en el cordón AB Mpa
σ1mx Esfuerzo de flexión en el plano lateral del empotre de la columna por
carga gravitacional y fuerza sísmica
Mpa
τ Período de la oscilación 1/cps
τ1, τ2, Período de vibración s
τlc Esfuerzo de corte directo en los tramos centrales de los largueros MPa
τldbe Esfuerzo de corte directo en la pared del soporte de la bota de
empotre para los pernos de los cojinetes de rodamiento
MPa
τlx Esfuerzo de corte directo en los tramos exteriores de los largueros MPa
τm1 Esfuerzo cortante medio por torsión a la mitad del lado corto de la
sección de la columna
MPa
τm2 Esfuerzo cortante medio por torsión a la mitad del lado largo de la
sección de la columna MPa
τmbe1 Esfuerzo cortante medio por torsión a la mitad del lado corto de la
sección transversal de la bota de empotre
MPa
τmbe2 Esfuerzo cortante medio por torsión a la mitad del lado largo de la
sección transversal de la bota de empotre MPa
ESIME TESIS DE MAESTRÍA AAR 2001
xi por fuerza sísmica
τphtc Esfuerzo cortante directo en travesaños centrales por fuerza sísmica MPa
τprc Esfuerzo cortante directo en tramo central de la pista de rodadura MPa
τpvlx Esfuerzo de corte directo en el tramo extremo del larguero producido
por carga gravitacional
MPa
τpvtc Esfuerzo cortante directo en travesaños centrales por carga
gravitacional MPa
τt Esfuerzo de corte directo en el tornillo de sujeción MPa
τw Esfuerzo cortante transversal en el cordón MPa
τwr Esfuerzo cortante resultante en el cordón MPa
χ Forma modal de vibración
ζ Relación ωf/ωn, relación C1/Cc
ω Frecuencia de vibración rad/s
ωf Frecuencia de la fuerza perturbadora rad/s
ωn Frecuencia natural de la vibración rad/s
A Amplitud, Dimensión
área
m m2
Abt Área de la sección transversal del cuerpo del tornillo de sujeción m2
Ac Área del material de las bridas sujeta a compresión m2
Acc Área de la sección transversal de la columna m2
Acl Área de la sección transversal del perfil a usar en el larguero m2
Actx Área de la sección transversal del perfil a usar en el travesaño
exterior m
2
Amx Amplitud máxima m
Amn Amplitud mínima m
Aplt Ancho de la plataforma m
Apr Ancho de la pista de rodadura m
Apz Área de la cara de la zapata m2
At Área de esfuerzo a la tensión de la cuerda del tornillo de sujeción m2
Atc Área de la sección transversal del perfil a usar en el travesaño central m2
Aw Área de la garganta de la soldadura m2
A Alargamiento estático del resorte que representa la estructura
Dimensión, distancia m m
a Alargamiento o deformación, magnitud m
a1 Distancia desde la línea de centros de la columna al patín de la
misma m
a2 Distancia del extremo libre de la columna al punto de aplicación del
momento concentrado móvil con la plataforma situada en su posición más elevada
m
a4 Distancia de la carga puntual al extremo del travesaño central m
a5 Distancia del extremo libre de la columna al nivel de la plataforma
situada en su posición más elevada
m
a6 Distancia del extremo libre de la plataforma a la línea de centros de
la columna m
a7 Distancia del extremo libre de la plataforma a la línea de centros de
los tornillos de sujeción con la bota m
atc Distancia del extremo libre del travesaño al CG del automóvil m
BAN Beneficio anual neto uniforme $
b Dimensión, distancia m
b1 Distancia del extremo de los travesaños centrales al centro de la
columna
m
b2 Distancia del CG del auto a la línea de centros de la columna m
bbe Ancho de la sección transversal del soporte de empotre m
bfcc Ancho del patín del perfil de la canal a usar para la columna m
bflx Ancho del patín del perfil a usar para el tramo extremo del larguero m
bftc Ancho del patín del perfil a usar para el travesaño de carga m
C Capacidad del mecanismo de elevación,
Dimensión,
Factor, factor para el nuevo NEMA
N m
C1 Constante
C2 Constante
Ca2 Constante
Ca3 Constante
Ca4 Constante
CG Centro de gravedad
Ccol Constante de amortiguamiento Coulomb
CG Factor de gradiente
CL Factor de carga
CS Factor de superficie
c Constante de amortiguamiento
Dimensión, distancia Constante
N/m m
c1 Constante
Constante de amortiguamiento viscoso N.s/m
c2 Constante
c3 Constante
c4 Constante
ca3 Constante
ca4 Constante
ESIME TESIS DE MAESTRÍA AAR 2001
xiii
Valor crítico de la constante de amortiguamiento N.s/m
cco1 Constante de amortiguamiento Coulomb N.s/m
cco2 Constante de amortiguamiento Coulomb N.s/m
c’ Constante de amortiguamiento combinado Coulomb-viscoso N.s/m
cs Coeficiente sísmico
cw Distancia a la fibra más alejada del cordón de soldadura m
D Dimensión m
Do Diámetro exterior del cojinete de rodamiento m
Dz Peralte de la zapata m
d Dimensión m
d1 Diámetro del cuerpo del tornillo m
d2 Diámetro mínimo del área del material que comprime el tornillo de
sujeción
m
d3 Diámetro máximo del área del material que comprime el tornillo de
sujeción m
dbe Distancia del centro de la rodaja al patín de la sección del soporte de empotre
m
dc Diferencial de longitud m
dcc Peralte de la canal a usar en la columna m
dlc Peralte del perfil a usar para el tramo central del larguero m
dlx Peralte del perfil a usar para el tramo exterior del larguero m
dpl Distancia de la fuerza sísmica horizontal al CG del perfil de los travesaño
m
dtc Peralte del perfil a usar para el travesaño central m
dtx Peralte del perfil a usar para el travesaño exterior m
E Módulo de elasticidad del material,
Dimensión
Pa m
e Base de los logaritmos naturales
Dimensión m
F Dimensión m
FAmx Factor de amplificación máximo
FAmn Factor de amplificación mínimo
FS Factor de sobrecarga, factor de seguridad
F1, F2 Cantidad futura de dinero $
Fa Carga axial estática sobre el cojinete de rodamiento, carga alternante N
Fat Carga alterna en el tornillo de sujeción N
Fi Tensión inicial de apriete del tornillo de sujeción N
Fm Carga media en el tornillo de sujeción N
F Fuerza perturbadora N
Fo Fuerza perturbadora inicial, fuerza sísmica perturbadora N
Frox Fuerza de reacción en los cojinetes de rodamiento de apoyo del soporte de empotre en dirección del eje “x”
N
Froz Fuerza de reacción en los cojinetes de rodamiento de apoyo del
soporte de empotre en dirección del eje “z”
N
Fsh Fuerza sísmica horizontal N
Ft1 Fuerza horizontal de reacción sobre la placa de conexión entre el
tornillo de potencia y la plataforma
N
Ft2 Fuerza horizontal de reacción sobre el patín de la columna N
Ftp Fuerza de tracción en el tornillo de potencia N
Ftt Carga de corte sobre cada tornillo de sujeción de la placa de
conexión entre el tornillo de potencia y la plataforma N
Fzhs Fuerza horizontal por sismo sobre la columna N
Fz Espesor de la zapata m
f Fuerza, fuerza de rozamiento
Fuerza constante de amortiguamiento Dimensión
N
m
fcc Ancho del patín de la sección transversal de la columna m
fn Frecuencia natural de vibración Hz
G Módulo de rigidez del material,
Dimensión MPa m
g Aceleración de la gravedad
Espesor del material comprimido por tornillo de sujeción Distancia
m/s2 N m
g2 Agarre de los tornillos m
Harreglo Potencia del arreglo kW
Hbt Torca de retención del freno N-m
Hz Altura de la zapata m
h Distancia m
hbe Peralte de la sección transversal de la bota de empotre m
hspr Peralte de la solera para la pista m
hw Longitud del cateto del cordón de soldadura m
IT Inversión total o cantidad presente $
Ih Momento de inercia del cordón horizontal de la soldadura m4
Iv Momento de inercia del cordón vertical de la soldadura m4
Ixw Momento rectangular de inercia del perfil del cordón de soldadura m4
Ixxbe Momento de inercia de la sección de transversal de la bota de
empotre m
4
Ixxcc Momento de inercia de la sección de transversal de la columna formada con canales en caja soldada patín contra patín
m4
ESIME TESIS DE MAESTRÍA AAR 2001
xv
Ixxlc Momento de inercia del perfil a usar para el tramo central del larguero
m4
Ixxlx Momento de inercia del tramo exterior del larguero m4
Ixxpr Momento de inercia de la pista de rodadura m4
Ixxpsl Momento de inercia de la sección transversal de la estructura de la plataforma en dirección longitudinal
m4
Ixxpst Momento de inercia de la sección transversal de la estructura de la
plataforma en sentido transversal m
4
Ixxtc Momento de inercia del perfil a usar para el travesaño de carga m4
Ixxtx Momento de inercia del perfil a usar para el travesaño exterior m4
Iyybe Momento de Inercia de la sección transversal de la bota de empotre m4
Iyycc Momento de inercia de la sección de transversal de la columna formada con canales en caja soldada patín contra patín
m4
Iyycl Momento de Inercia del perfil propuesto a usar para la columna m4
Iyylc Momento de Inercia del perfil propuesto a usar para el tramo central del larguero
m4
Iyylx Momento de inercia del perfil para el tramo extremo del larguero m4
Iyypr Momento de inercia de la pista de rodadura m4
Iyypsl Momento de inercia de la sección transversal de la estructura de la plataforma en dirección longitudinal
m4
Iyypst Momento de inercia de la sección transversal de la estructura de la plataforma en dirección transversal
m4
Iyytc Momento de inercia del perfil a usar para el travesaño de carga m4
Iyytx Momento de inercia del perfil a usar para el travesaño exterior m4
i Distancia m
i Interés de una deuda o de una inversión $
j Dimensión m
K Constante de equivalencia para potencia
Kbe Factor dependiente de la forma y dimensiones de la sección del
soporte de empotre
Ki Constante
Kt Factor dependiente de la forma y dimensiones de la sección
transversal
k’ Constante elástica equivalente del un sistema elástico de la estructura
k1 Factor de carga compresiva axial de la columna para flexión en plano
lateral
k1prc Constante elástica del tramo central de la pista de rodadura en
deflexión vertical N/m
k1prx Constante elástica del tramo exterior de la pista de rodadura en deflexión vertical
N/m
deflexión horizontal
k2prx Constante elástica del tramo exterior de la pista de rodadura en deflexión horizontal
N/m
k2tx Constante elástica del travesaño exterior en deflexión horizontal N/m
k1tx Constante elástica del travesaño exterior en deflexión vertical N/m
k2 Factor de carga compresiva axial de la columna para flexión en plano
frontal
k2lc Constante elástica del tramo central del larguero en deflexión horizontal
N/m
k2lx Constante elástica del tramo exteriores del larguero en deflexión
horizontal N/m
k1lc Constante elástica del tramo central del larguero en deflexión vertical N/m
k1lx Constante elástica del tramo exteriores del larguero en deflexión vertical
N/m
kc Constante elástica de una columna
rigidez del material comprimido por el tornillo
N/m
kcc Espesor grueso del patín de la canal a usar con la columna m
kf Factor real de concentración de esfuerzos
kflc Espesor máximo del patín del perfil a usar en el tramo central del larguero
m
kflx Espesor máximo del patín del perfil a usar en el tramo exterior del larguero
m
kftc Espesor en la parte más gruesa del patín del perfil del travesaño de carga
m
kp Constante elástica de la plataforma N/m
kt Rigidez del tornillo N/m
LAB Longitud el cordón vertical de soldadura m
LBC Longitud el cordón horizontal de soldadura m
Lbe Claro entre cojinetes de rodamiento de apoyo de la bota de empotre m
Lc Longitud total de la columna m
Lcar Longitud del ángulo carril para los cojinetes m
Lplt Longitud de la plataforma m
Lprc Longitud del tramo central de la pista de rodadura m
Lprx Longitud del tramo exterior de la pista de rodadura m
Ltc Longitud del travesaño de carga. m
Ltp Longitud total del ensamble del tornillo de potencia m
Llc Longitud del larguero central m
Llx Longitud del tramo exterior del larguero m
M Contante
M1mx Momento flexionante máximo en plano lateral de la columna
ESIME TESIS DE MAESTRÍA AAR 2001
xvii
M2mx Momento flexionante máximo en plano lateral de la columna
producido por fuerza sísmica
N-m
M3mx Momento flexionante máximo en plano frontal de la columna
producido por fuerza sísmica
N-m
Mhlc Momento de empotre en plano horizontal del tramo central N-m
Mhlx Momento de empotre en plano horizontal del tramo extremo del
larguero
N-m
Mhtc Momento de empotre en plano horizontal del travesaño central con
soporte producido por fuerza sísmica
N-m
Mmxlc Momento flexionante máximo por carga gravitacional en tramos
centales del larguero N-m
Mmxlx Momento flexionante máximo por carga gravitacional en tramos exteriores del larguero exterior
N-m
Mmxprc Momento flexionante máximo por carga gravitacional en tramos
centrales de la pista de rodadura N-m
Mmxprx Momento flexionante máximo por carga gravitacional en tramos exteriores de la pista de rodadura
N-m
Mmxtc Momento de empotre en plano vertical del travesaño con el soporte de empotre por carga gravitacional
N-m
Mov Momento concentrado en plano lateral de la columna debido a carga
gravitacional N-m
Mtmx Momento flexionante total máximo en plano lateral del empotre de la
columna producido por carga gravitacional y fuerza sísmica
N-m
Mvlc Momento de empotre en plano vertical del tramo central del larguero N-m
Mvlx Momento de empotre en plano vertical del tramo exterior del
larguero
N-m
Mvtc Momento de empotre en el tramo central del travesaño por carga
gravitacional
N-m
Mvtca Momento flexionante alternante en el cordón de soldadura por carga
gravitacional N-m
Mvtcm Momento flexionante medio en el cordón de soldadura por carga gravitacional
N-m
Mvtcmn Momento flexionante mínimo en el cordón de soldadura por carga
gravitacional N-m
Mvtcmx Momento flexionante máximo en el cordón de soldadura por carga gravitacional
N-m
ms Masa de la columna N
ms Margen de seguridad
mt Masa total N
Nt Número de tornillos de sujeción
Ntp Número de tornillos de potencia
n Velocidad angular
Número de períodos iguales
rad/s o rpm
nm Velocidad de giro del motor rpm
npp Número de vueltas del tornillo por cada 25.4 mm de elevación rev
nro Velocidad angular del cojinete de rodamiento rpm
nspr Número de soleras a usar en la pista de rodadura
nt Velocidad de giro del tornillo de potencia rpm
P Carga axial en la columna
Valor presente de una inversión N $
P/A Factor de valor presente para una serie de pagos uniformes
P/F Factor de valor presente para pago único de una deuda $
PLAB Pendiente de la línea de Goodman
PLCD Pendiente de la línea de esfuerzos CD
Ple Pendiente de la línea de estado de esfuerzos del tornillo de sujeción
Po Carga radial estática sobre el cojinete de rodamiento N
p Presión por unidad de área N/m2
pu Porciento de utilización %
Qf Capacidad del freno N-m
Qm Torca motriz de elevación N-m
Qmn Torca motriz nominal N-m
Qr Torca de reacción en el empotre de la columna N-m
Qslc Torca de torsión en los tramos centrales de los largueros N-m
Qslx Torca de torsión en los tramos exteriores de la estructura de la plataforma
N-m
RVg Relación de velocidad en caja de engranes
R1lc Porciento de rigidez del tramo central del larguero en deflexión vertical
%
R1lx Porciento de rigidez del tramo exterior del larguero en deflexión
vertical %
R1tx Porciento de rigidez de los travesaños exteriores en comparación con
la rigidez de los tramos centrales de la pista de rodadura en deflexión vertical
%
R2lc Porciento de rigidez del tramo central del larguero en deflexión horizontal
%
R2lx Porciento de rigidez del tramo exterior del larguero en deflexión horizontal
%
R2prc Porciento de rigidez del tramo central de la pista de rodadura en
ESIME TESIS DE MAESTRÍA AAR 2001
xix
R2prx Porciento de rigidez del tramo exterior de la pista de rodadura en deflexión horizontal
%
R2tx Porciento de rigidez de los travesaños exteriores en comparación con
la rigidez de los tramos centrales de la pista de rodadura en deflexión horizontal
%
Rlprc Porciento de rigidez del tramo central de la pista de rodadura en deflexión vertical
%
Rlprx Porciento de rigidez del tramo exterior de la pista de rodadura en deflexión vertical
%
Rt1 Fuerza cortante en los tornillos de sujeción N
Rtmn Fuerza cortante mínima en los tornillos de sujeción N
Rtmx Fuerza cortante máxima en los tornillos de sujeción N
Rtr Porciento de rigidez de cada tornillo de sujeción %
Ry Fuerza de reacción en el empotre o en la placa de conexión al tornillo
de potencia N
Ry Fuerza de reacción en el eje “y” N
r Constante
S’n Límite estándar de duración MPa
Sn Resistencia a la fatiga del material MPa
Sp Resistencia de prueba del tornillo de sujeción MPa
Ssy Resistencia al corte del material MPa
Su Resistencia última del material MPa
Sus Resistencia última al corte del material MPa
Suw Resistencia última de la soldadura MPa
Sy Resistencia de fluencia del material MPa
T Energía cinética N-m/s
Tc Par de torsión actuando sobre la columna producido por fuerza
sísmica m-N
t Tiempo s
tbe Espesor de la pared de la bota de empotre m
tcar Espesor del carril de los cojinetes de rodadura m
tf Espesor de la brida de conexión a la tuerca de bolas m
tfcc Espesor del patín de la sección de la columna m
tflx Espesor mínimo del patín del perfil a usar para el tramo extremo del larguero
m
tftc Espesor del patín del travesaño de carga m
trbe Espesor de la placa de refuerzo de la pared de la bota de empotre para apoyar pernos de los cojinetes de rodadura
m
tspr Espesor de la solera de la pista de rodadura m
cordón de la soldadura
twcc Espesor del alma de la sección de la columna m
twlx Espesor del alma del perfil a usar en tramo extremo del larguero m
twtc Espesor del alma del perfil a usar en el travesaño de carga m
V Energía potencial N-m/s
VP Valor presente de una inversión $
VNP Valor neto presente $
VTN Valor terminal neto de un bien $
Vphlx Fuerza de corte directo en los tramos exteriores del larguero por fuerza sísmica
N
Vphtc Carga de corte directo en travesaños centrales por fuerza sísmica N
Vprc Carga de corte directo en plano vertical en tramo central de la pista de Rodadura producido por carga gravitacional
N
Vpvlx Fuerza cortante en plano vertical sobre alma del tramo extremo del
larguero N
Vpvtc Fuerza cortante directa sobre travesaños centrales por carga gravitacional
N
v Velocidad de elevación m/min
Wa Peso del automóvil prototipo N
Wm Peso de la máquina estibadora N
Wplt Peso de la plataforma N
Wt Carga total a elevar incluyendo sobrecarga N
X Deflexión en el punto de aplicación de Wt m
Xtmxc Deflexión máxima de la columna m
x Amplitud, Desplazamiento en la dirección x
Expresión general de movimiento
Solución de la ecuación del modo de vibración
m
x0 Magnitud de un vector m
x1 Solución de la ecuación del modo de vibración, solución particular
x2 Solución complementaria de una ecuación
x& Primera derivada de una función o velocidad m/s
x&
& Segunda derivada de la función o aceleración m/s2
xc Deflexión estática de la columna en el punto de conexión con la
plataforma
m
xcc Distancia del eje neutro a la espalda de la canal propuesta para la columna
m
xest Deflexión estática m
xlx Distancia del eje neutro a la espalda del perfil a usar para el larguero de la estructura de la plataforma
m
xo Desplazamiento inicial m
ESIME TESIS DE MAESTRÍA AAR 2001
xxi
xtc Distancia del eje neutro a la espalda del perfil a usar para el travesaño de carga
m
xtx Distancia del eje neutro a la espalda del perfil a usar para el travesaño exterior
m
Ypt Deflexión estática máxima de la plataforma m
Ytmxc Amplitud de la vibración libre del sistema elástico m
y Ecuación de línea recta
y& Primera derivada de una función
yadmbe Deflexión admisible en la bota de empotre m
yadmc Deflexión máxima admisible en la columna m
yadmlx Deflexión admisible en el tramo exterior del larguero m
yadmprc Deflexión admisible en el tramo central de la pista de rodadura m
yadmprx Deflexión admisible en el tramo exterior de la pista de rodadura m
yadmtc Deflexión admisible en travesaño de carga m
yc Deflexión estática en cualquier punto a lo largo de la columna m
ylx Deflexión real en extremo libre del tramo exterior del larguero m
ymx1c Deflexión máxima real del extremo libre de la columna en plano lateral producida por momento concentrado
m
ymx2c Deflexión máxima real en el plano lateral del extremo libre de la
columna por fuerza sísmica m
ymxbe1 Deflexión máxima real de la bota de empotre en el plano lateral por carga gravitacional
m
ymxbe2 Deflexión máxima real de la bota de empotre en el plano frontal por
carga gravitacional m
ymxprc Deflexión máxima en tramo central de la pista de rodadura m
ymxprx Deflexión máxima del tramo exterior de la pista de rodadura m
ytc Deflexión real en el travesaño central por carga gravitacional m
ytmxc Deflexión estática máxima de la columna
Deflexión real total máxima de la columna en el plano lateral
m
yp Deflexión de la plataforma en el punto del centro de gravedad del
automóvil
m
yvc Deflexión vertical de la columna en el punto de empotre de la
H I P Ó T E S I S D E L A T E S I S
El tema propuesto para este trabajo es el diseño por evolución de una máquina estibadora para el estacionado de automóviles, que se fabrica en contados países, la cual invariablemente está representada por un modelo con cuatro columnas soportantes, por razones de sencillez en su cálculo, diseño, estabilidad y seguridad, pero, que la hace estorbosa, impráctica y nada atractiva para su instalación dentro de casas habitación. Por lo tanto, se está suponiendo en este trabajo que es posible desarrollar un modelo de máquina, que en vez de emplear cuatro columnas de sustentación use sólo dos con iguales condiciones de seguridad, confiabilidad y que ofrezca, además, las ventajas de ser más compacta y agradable a la vista, como en esta ocasión se ha hecho. Se resolvería el mismo problema en base a una nueva tecnología sustentada en un nuevo concepto de diseño propuesto, que es lo que se pretende demostrar dentro del contexto del presente trabajo.
xxiii
R E S U M E N
El contenido de este trabajo lo constituye el desarrollo de los cálculos, de diseño del prototipo de una máquina motorizada, para el estacionado de dos vehículos automotores, (coupes, sedanes, convertibles y camionetas) de uso común en nuestro país, para lo cual se empleó una metodología de diseño modular, que facilite el ensamble.
En este trabajo se aplicaron las técnicas modernas del Despliegue de Funciones de Calidad (QFD) [1] como parte del diseño, para la identificación de los requerimientos de calidad, descomposición funcional, entre otros. Este trabajo está completo en todos sus aspectos, puesto que cubre todas las fases del diseño, desde la descripción del problema, la búsqueda de soluciones mediante la técnica de tormenta de ideas [2], análisis cinemático para producir los movimientos requeridos; estudio dinámico de la misma para estimar los valores de las cargas y reacciones, selección de materiales, e ingeniería del sistema mecánico bajo consideración.
Sin descuidar los aspectos de seguridad, economía y confiabilidad funcional se ha puesto gran atención al aspecto estético del ensamble, de manera que la forma y apariencia sea de lo más agradable posible, con objeto de atraer la atención del usuario, especialmente la de aquellos con mayores limitaciones de espacio para el estacionado de más de un automóvil dentro de sus predios o lugares de residencia, y deseen duplicar la capacidad de sus cocheras.
Se hace también un estudio detallado del análisis dinámico y la estabilidad del sistema, así como un análisis económico, para determinar el valor presente del capital requerido para la inversión que representa la adquisición de la máquina por parte del “cliente”
y finalmente, culmina con las conclusiones y recomendaciones, que todo trabajo como el presente, debe contener.
A B S T R A C T
The content of this work constitutes the development of design calculations for the prototype of a machine of motorized operation for parking up to two automotive vehicles, (coupes, hatchbacks, minivans, pick-ups sedans and convertible,) which are of common use in Mexico; accordingly a design methodology in order to get a modular and easy to assemble unit.
In this work modern quality function deployment techniques (QFD)[1] were applied for the identification of the requirements of quality, functional decomposition, etc. The work is complete in all respects, since it covers all the phases of the design, from the description of the problem to the search of problem solutions using brain storm techniques [2]. Cinematic synthesis and analysis to produce the required movements. Dynamic study of the different mechanisms selected to estimate the values of loads and reactions, materials selection, and the detail engineering of each one of the component pieces of the mechanical system under consideration.
xxv
JUSTIFICACIÓN
El parque vehicular total en México, en el año 2000, era aproximadamente 15 millones, de los cuales el 15 % se localiza en el Valle de México (D.F. y zona conurbada) [3]. Esto es, alrededor de 2’350,000 (dos millones trescientos cincuenta mil), los que desglosados en tipos y categorías pueden ser listados de la siguiente manera:
• Vehículos personales (tipos coupé, suburban, sedán, convertibles, vehículos todo terreno, minivans, vagonetas, camioneta y tipo panel)... 1’605,000
• Autobuses ... 20,000
• Vehículos comerciales de carga... 680,000
• Motocicletas... 45000
Para dar alojamiento a tan elevado número de autos no se tienen suficientes sitios de estacionamiento público con el requerido número de cajones; se cuentan, tan sólo con un reducido número de instalaciones adecuadas y el resto son lotes improvisados producto de la demolición de edificios, donde los autos son manipulados y apiñados, sin cuidado, ni precaución por personal carente de educación y preparación para el desempeño de sus labores, con el consecuente maltrato y deterioro, que, invariablemente, sufren los bienes bajo su cuidado.
Sólo el 0.005% de los habitantes del Valle de México que, poseen vehículos automotores tienen espacio para estacionar más de 4; el 28% espacio para dos autos, y el 57%, de quienes habitan en las casas y unidades habitacionales, solo están en condiciones de estacionar un auto, por lo que se ven obligados dejarlos en la vía publica, expuestos al vandalismo o a que les sean robados.
Por lo anteriormente expuesto, la ejecución se justifica sobre la base de que:
Se simplifica el acondicionamiento de sitios permanentes para el estacionamiento de autos en cualquier lote baldío, los que serán seguros y confiables sin necesidad de realizar grandes obras civiles, que representen inversiones onerosas.
Si así se desea, el automovilista, podrá entrar y estacionarlo él mismo, de forma automática, con sólo oprimir un botón desde su vehículo, y recogerlo de igual forma
Se resuelve un problema cotidiano, que aqueja a los automovilistas poseedores de más de un auto en el sentido de que en un mismo cajón podrá estacionar dos, estibando el segundo abajo del primero.
• Se contribuye al desarrollo tecnológico del país, que implica actividades económicas
mediante la fabricación de bienes de capital.
• Se crean fuentes de trabajo imprescindibles, para dar empleo a una población cada día
mayor de jóvenes compatriotas, que año con año ingresan al campo laboral.
• Se contribuye a disminuir los índices de delincuencia, al exponer a la tentación del
xxvii
M E T A S
Objetivo general: desarrollar la tecnología o “know how” del diseño de una máquina para estibar automóviles con características, dimensiones y capacidad que satisfagan los siguientes requerimientos:
• Elevar autos de tamaño mediano y pequeño de la categoría definida como tipo de
tamaño medio (“TM”) [4].
• Elevar la plataforma a una altura de 1.75 m.
• Conseguir un diseño capaz de adaptarse a las viviendas típicas de la ciudad de México.
• Lograr que el conjunto cargado tenga estabilidad estructural tomando en consideración los fenómenos sísmicos.
• Conseguir un diseño modular, de manera, que el ensamble no requiera de soldadura,
remaches, ni de herramientas especiales.
• Desarrollar una máquina segura, de bajo costo, fácil de mantener, equipada con
mecanismos para servicio intemperie totalmente protegidos contra humedad y corrosión.
• De funcionamiento confiable y eficiente para ser accionado y controlado por una sola persona.
• Emplear en su diseño componentes y sistemas mecánicos comerciales, que desarrollen
funciones primarias, secundarias o terciarias necesarias para la ejecución de la función global del conjunto sin necesidad de diseñar tales elementos.
• Proveer a las unidades motrices, de mecanismos con extensión de flecha motriz para su accionamiento manual en casos de falla de energía.
O B J E T I V O S E S P E C Í F I C O S
• Asegurar resistencia, ligereza y duración, como parámetros y requerimientos de calidad que normarán su diseño, en un espacio mínimo.
• Establecer una metodología de diseño de la estructura y mecanismos involucrados basada en el modelo sinérgico y en el despliegue de funciones de calidad (QFD) [1]
• Resolver las ecuaciones de naturaleza cinemática y dinámica, que se deduzcan de los movimientos que participan en los mecanismos.
• Plantear un análisis de cargas para determinar el valor de las fuerzas de resistencia útil, que se desarrollan en el manejo de la carga crítica máxima, a que se someterá la
máquina, y lograr un diseño óptimo de cada pieza.
• Aplicar los principios fundamentales del diseño orientados a una manufactura y ensamble modular del conjunto.
xxix
I N T R O D U C C I Ó N
El desarrollo de este trabajo se inicia con el planeamiento detallado del problema, que para muchos propietarios y/o usuarios de vehículos automotores, con limitación de espacio en sus hogares y lugares de trabajo, representa la necesidad de contar con espacio adecuado para el estacionamiento de los mismos.
La solución del problema condujo a efectuar una investigación con relación a las dimensiones y pesos de vehículos automotores de todas las marcas y modelos de origen norteamericano, europeo y japonés comercializados en México [5], con el fin de establecer intervalos dimensionales del conjunto de vehículos de uso común en el país, y poder proponer el diseño de una máquina elevadora de autos, que permita aprovechar el espacio vertical existente en las áreas restringidas de los estacionamientos particulares o públicos. Esta investigación incluyó un total de 94 autos (coupé, suburban, sedán y convertible), 16 vehículos de todo terreno, 15 vagonetas, 6 camionetas y 3 vehículos tipo panel.
De los resultados obtenidos se vio, que el rango de dimensiones y pesos es el siguiente: Autos:
a). altura total de 1.2 a 1.50 m
b). ancho total de 1.60 a 2.00m
c). distancia entre ejes de 2.40 a 3.10 m d). largo total de 3.70 a 5.50 m
e). peso total de 841 a 1965 kg
Vagonetas:
a). altura total de 1.40 a 1.90 m b). ancho total de 1.70 a 1.90 m
c). distancia entre ejes de 2.40 a 3.10 m d). largo total de 3.60 a 5.10 m
e). peso total de 1053 a 1997 kg
Camionetas:
a). altura total de 1.40 a 1.90 m b). ancho total de 1.70 a 1.90 m
c). distancia entre ejes de 2.80 a 3.20 m
d). largo total de 4.80 a 5.30 m e). peso total de 1271 a 2860 kg Vehículos todo terreno:
a). altura total de 1.60 a 2.00 m b). ancho total de 1.70 a 2.00 m
c). distancia entre ejes de 2.40 a 3.30 m d). largo total de 3.90 a 5.60 m
e). peso total de 1431 a 2957 kg
Vehículos tipo panel:
a). altura total de 2.00 a 2.10 m b). ancho total de 1.70 a 2.00 m
c). distancia entre ejes de 2.40 a 3.50 m d). largo total de 4.50 a 5.60 m
e). peso total de 1200 a 2440 kg
Vehículo tipo autobús:
a). altura total de 2.00 a 2.10 m b). ancho total de 1.70 a 2.00 m
c). distancia entre ejes de 2.60 a 3.50 m d). largo total de 4.80 a 6.00 m
e). peso total de 1620 a 2529 kg
De lo anterior se concluyó, que era conveniente desarrollar dos modelos de máquinas, a saber:
• Uno, se denominará modelo “TM”, orientado al uso doméstico, para el estacionamiento de
dos vehículos que incluyan autos sedán, coupé, con quinta puerta, convertible, vagoneta y minivan ligeros de las siguientes dimensiones:
a). para una altura de elevación de plataforma de 1.75 m b). para un ancho total máximo de 2.00 m
c). para una distancia máxima entre ejes de 2.50 m
e). para un peso total máximo del vehículo de 15696 N (1600 kg)
• Un segundo modelo, el “TG” para uso en servicio público y privado, con capacidad de
alojar dos vehículos de los tipos: todo terreno, camionetas, panel pesados y minibús, de las siguientes dimensiones:
xxxi
ESTADO DEL ARTE DE LAS MÁQUINAS ESTIBADORAS
Las máquinas para estacionar automóviles, de iguales funciones a la aquí propuesta, sólo se fabrican en los Estados Unidos de Norte América, Alemania, Japón, y Suecia. Sin embargo, el funcionamiento en todas ellas se basa en el empleo de cuatro columnas sometidas a compresión [6]. Todas están equipadas con mecanismos electromecánicos de accionamiento eléctrico, hidráulico o neumático, y emplean cables, cadenas o cilindros lo cual las hacen seguras y confiables, pero no atractivas para ser instaladas dentro del hogar del usuario, debido a que resulta incómodo y estorboso el tener cuatro columnas. Actualmente, no existe en el mercado nacional ninguna empresa dedicada a la fabricación de esta clase de bienes de capital, aunque en la ciudad de Monclova Coahuila se localiza Atlaslifts, quien fabrica tres modelos de máquinas elevadoras automotrices de dos y cuatro columnas, cuya función es muy distinta a la de una estibadora, ya que su empleo se restringe al izaje de automóviles en talleres para cambio de llantas y revisión de frenos.[6]
Dado que la máquina de dos columnas sin travesaño de Atlaslifts, no resulta ser práctica para el estacionado rápido de automóviles, ya que requiere de una cuidadosa localización de los brazos cargadores. Además, el automóvil se debe situar en medio de las columnas; por lo que, para satisfacer las necesidades del mercado nacional se ha tenido que recurrir a su importación con la consiguiente fuga de divisas
Uno de los aspectos fundamentales de la tecnología consiste en el modo como se hacen o fabrican las cosas, en comparación con las mejores del mundo, y en saber modificar un producto para satisfacer una necesidad o resolver un problema, de forma más simple y novedosa, de manera, que el diseño propuesto cumpla con tales expectativas y es eso lo que se ha intentado en este trabajo de tesis.
Referencias:
1. Jorge Ramos Watanabe “Tesis para obtener el grado de Maestro en Ciencias”, ESIME, 1996.
2. Alexander Levens, William Chalk, “Grafics in Engineering Design”, John Wiley & Sons Inc., New York, 1980.
3. www.paragon.com.mx
4. Véase “Introducción”
5. Anexo 1 de este trabajo
CAPITULO 1
CAPITULO 2
CAPÍTULO 3
CAPÍTULO 4
CAPÍTULO 5
1. METODOLOGÍA DEL DISEÑO
La metodología del diseño es un proceso o serie de tareas a realizar, en el que se aplican principios científicos y métodos técnicos (conocimientos físicos, químicos, metalúrgicos, matemáticos, lenguajes de cómputo, etc), para la ejecución de un plan que resultará en la satisfacción de una necesidad. El proceso de diseño, es esencialmente un ejercicio de creatividad aplicada, en el cual se tiene una no muy clara definición del problema, para el cual existen muchas posibles soluciones. La serie de tareas a ejecutar son las siguientes: 1.- Planteamiento y justificación del problema o necesidad.
2.- Comprensión e investigación detallada de datos que respalden el origen del problema. 3.- Alcance o límites del proyecto.
4.- Determinación de especificaciones.
5.- Lluvia y síntesis de ideas de posibles conceptos para la solución del problema. 6.- Análisis y evaluación de conceptos.
7.- Selección y justificación del concepto considerado como el más óptimo.
8.- Diseño conceptual.
9.- Diseño detallado de las piezas o componentes. 10.- Fabricación del prototipo.
A continuación se hará una descripción detallada del contenido de cada una de las etapas arriba mencionadas:
o pieza bajo consideración. Dichas condiciones también llamadas especificaciones o factores de diseño, incluyen: dimensiones de espacio y/o volumen a ocupar y sus limitaciones, el rango de capacidades, las velocidades de operación, las restricciones de peso y tamaño, la confiabilidad, la duración esperada, la cantidad de piezas a fabricar, el costo de fabricación, el precio de venta, los objetivos de la empresa y su capacidad de fabricación son condiciones determinantes en el proceso de diseño y fabricación. En este caso, la identificación de la necesidad ya ha sido claramente definida y ubicada en un contexto de ingeniería [1].
1.2. Comprensión del problema e investigación detallada.-La comprensión o definición del problema, acompañada de una investigación detallada del mismo, ayuda a entender plenamente la necesidad y a establecer el alcance del proyecto. Generalmente, antes de establecer la definición final del problema, el diseñador se ve involucrado en una iteración o serie de pasos repetitivos, los que ocurren a través de la vida del proyecto de diseño. La iteración es un aspecto del diseño que se presentará siempre, y vale la pena enfatizar el hecho de que el diseñador está continuamente regresando a hacer algo mejor o a hacer algo no considerado anteriormente. Cada vez que se itera, la definición (o cualquier fase del diseño en la que se esté) probablemente se mejora en cierto grado. Sin embargo, después de cambios y frustraciones, el ingeniero de diseño, después de algún tiempo, debe tomar decisiones basadas en la información que ha sido capaz de coleccionar en base a la investigación llevada a cabo y continuar con la siguiente etapa o fase.
1.3. Alcance o Límites del Proyecto.- Establece y describe con claridad los límites a los cuales se circunscribirá la realización del proyecto, que se traducirán en compromisos, técnicos, funcionales y de operación que el producto deberá cumplir y que por lo tanto se convertirán en obligaciones que el diseñador debe respetar.
cantidad. El número de piezas a fabricar o construir, los acabados superficiales y terminados, el plazo de entrega, instalación o montaje y pruebas del sistema así como eficiencias y/o rendimientos.
1.4. Determinación de Especificaciones.- La cuarta etapa exige la preparación detallada de una serie de especificaciones normas y procedimientos, a las cuales se llega después de producir la transformación, de un estado subjetivo y abierto que representa la necesidad, a otro concreto y preciso expresado en lenguaje semántico, analítico y gráfico que permita, sin ambigüedad la fabricación del bien o producto, con las características de calidad propuesta durante su diseño. Todo lo anterior se consigue mediante la comprensión absoluta del problema y la debida aplicación de metodologías modernas de diseño como lo es el despliegue de funciones de calidad (QDF) que incluye la serie de pasos a continuación enlistados: [2]
paso 1: Identificación del cliente
paso 2: Determinación de los requerimientos del cliente
paso 3: Ponderación de los requerimientos del cliente
paso 4: Estudio comparativo
paso 5: Traducción de los requerimientos del cliente
paso 6: Fijación de metas de diseño
1.6. Análisis y evaluación de conceptos.- Se analizan los conceptos que conducen a posibles soluciones generadas en la etapa anterior y se evalúan los mismos en razón de cuatro criterios como son:
a). Factibilidad funcional.- Para comprobar que sean funcionalmente correctos, deben cumplir con los requerimientos del cliente. Para investigar que tan distinta, parecida o igual es la solución propuesta en comparación a como se ha resuelto antes y estar seguros si se trata de un concepto original o no.
b). Factibilidad tecnológica.- Deben responder a las siguientes interrogantes: ¿existe la tecnología requerida?, ¿está disponible?, ¿se puede fabricar bajo esa tecnología?, ¿se conocen los modos de falla de esa tecnología? y finalmente, ¿se trata de una tecnología madura?
c). Evaluación de los conceptos a partir del cumplimiento de los requerimientos del cliente
.-Para sólo considerar conceptos que reflejen el interés particular de la correcta interpretación de los requerimientos del cliente traducidos a unidades 100% mensurables.
d). Evaluación relativa entre los diferentes conceptos que han pasado las tres evaluaciones anteriores.- Ello se hará utilizando una técnica de matriz de decisiones conocida como el
Método de Pugh, para lo cual se requiere conocer los fundamentos técnicos y científicos de los conceptos a evaluar, establecer criterios de comparación, tomar uno de los conceptos como base de comparación y proceder a la calificación de los conceptos sobrevivientes.

![Tabla No. 3-1: Especificaciones del actuador de tornillo de bolas [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/4976338.75977/101.612.83.549.124.500/tabla-no-especificaciones-del-actuador-de-tornillo-bolas.webp)
![Tabla No. 3.2: Tabulación de los Factores “C” para el Freno del Motor [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/4976338.75977/102.612.85.466.467.673/tabla-tabulacion-factores-c-freno-motor.webp)