Efectos de la fatiga muscular en clasificadores para el control de prótesis de miembro superior
66
0
0
Texto completo
(2) Facultad de Ingeniería Eléctrica Centro de Estudios de Electrónica y Tecnología de la Información. TRABAJO DE DIPLOMA. Efectos de la fatiga muscular en clasificadores para el control de prótesis de miembro superior. Autor: Luis Emilio Supervia Jara E-mail: [email protected]. Tutor: MSc. Ing. Roberto Díaz Amador E-mail: [email protected]. Santa Clara 2014 "Año 56 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Biomédica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “ Es tan vana la esperanza de que se llegará sin trabajo y sin molestia a la posesión del saber y la experiencia, cuya unión produce la sabiduría, como contar con una cosecha donde no se ha sembrado ningún grano.”. Benjamín Franklin.
(5) ii. DEDICATORIA. A los padres más maravillosos del mundo: Ileana y Osvaldo. A la memoria de mis abuelos Cuco y Gonzalo. A mi familia y amigos.. A los.
(6) iii. AGRADECIMIENTOS “Toda gran idea comienza siendo una blasfemia”, leí una vez una vez hace ya varios años en una revista Bohemia, mas hoy recuerdo aquellos días, hace casi 10 años, cuando estando en la secundaria me dije que quería llegar hasta aquí. Ha pasado el tiempo, y hoy ese pensamiento adolescente se vuelve realidad. No ha sido un camino nada fácil, aunque los que me conocen saben que no he terminado, pero sería ingrato de mi parte no compartir este momento con quienes de una forma u otra me han inspirado y apoyado el deseo de ser un buen profesional. Llegue a todos entonces mi eterno y sincero agradecimiento. Agradecer especialmente: A mami y papi, por estar siempre allí, por ayudarme a vencer cada obstáculo, por apoyarme, por su paciencia, por su cariño y cuidado, por el sacrificio, por el amor. Espero que estén orgullosos de su negro que ya se gradúa, ha sido ese mi mayor anhelo. Ojalá pueda retribuirles todo lo que han hecho por mí, mi esfuerzo cada uno de estos años ha sido pensando fundamentalmente en ustedes. A mi tutor, por cada enseñanza y esfuerzo, por su paciencia para aguantarme, y sobre todo su incondicionalidad. Sin su ayuda hubiese sido imposible. A mis abuelas Teresa, Aideé y Ana, por su cariño, dedicación e incondicionalidad en su apoyo, por darme lo mejor que han podido, esto también es para ustedes, enseñándome a levantarme ante cada caída y a ser mejor persona. A mis abuelos Cuco y Gonzalo, que en cualquier lugar donde estén espero que se sientan orgullosos y quiero que sepan que no hay quién me pele mejor y me dé un peso para comprarme un helado después de la escuela, ni que se faje para que no me pongan de castigo ni me vayan a ver cada tarde en la bicicleta a la casa para verme comer. A mi hermano por las cosas que me ha enseñado, más de las que se imagina y por estar velando de mí siempre. A mi Madrina y a Ulises por la palabra sabia, por ser como mis padres, por su apoyo ante cada decisión, por quererme sobre todas las cosas..
(7) iv A mis niñas Mari y Ferni, por hacerme el primo más feliz del mundo con su presencia. A mi tía Puchi y mi tía Magalis, por cada detalle, por cuidarme y estar pendiente de todo lo que me hacía falta. A mi tío Osvaldo y tío Gonzalito, por su ayuda cada mes sin falta durante 5 años, su cariño y atención en cada momento, respectivamente. A Oscarito, Pito y Rika, por su amistad, y más que eso por ser como mis hermanos y ser correspondido, por cada ayuda, cada consejo, cada abrazo y sonrisa aún en tiempos muy difíciles para mí y a pesar de las distancias, hacen ya 9 años que nos conocimos y el haberlo hecho ha sido una de las mejores cosas que me ha sucedido en la vida, por ser siempre los cuatro fantásticos y hacerme sentir querido. A Yusni, ¡negro mira que me has dado trabajo!, nada, feliz de haberte conocido, agradecido a la vida por permitirme ser tu amigo, aún creo que me faltan años cargando contigo, pero sin miedo, más que nada gracias por cambiarme los colores del día cuando este resultaba opaco, por querer matarte y quererte cada vez que hacías algo malo, por confiar y creer siempre en mi sobre todas las cosas, por ser muchas veces mi bujía. A Aileen, Pilar e Isaura, gracias por disfrutar de su presencia estos años en mi vida, por ser amigos a pesar del tiempo, porque no es necesario verse diariamente para saber que puedo contar con ustedes, las quiero mucho. A Teresa, Cancio, Marisela, Oscarín, Rita, Onel, Yaquelín y Carlos, por ser como mis padres, cuidar de mí, y tratarme como uno de sus hijos de manera incondicional. A Damarys, ´perra´, gracias por la palabra, por el gesto y por permitirme durante estos 5 años contar contigo, por ser una magnífica amiga, te quiero mucho. A Wendy, conocer a alguien que desde un principio supo qué quería para su vida, ha sido algo que me ha enseñado a trazarme más metas y dar pasos firmes hacia ellas. Gracias por permitirme conocerte, y por cada consejo y apoyo. A Lismey y Aramis, por su comprensión, su apoyo, ternura, cariño y estar siempre pendiente de mí, gracias por haberlos conocido..
(8) v A Gustavo y Yaniet, por comprenderme, ayudarme, quererme y velar de mí, por su apoyo y sinceridad. A Yander, porque a pesar de su cara dura, demostrarme que vale la pena sacrificar horas en la cocina por un amigo, gracias mono por tu afecto y ayuda. A Youry y Karell, por los buenos tiempos, por su amistad y apoyo, por hacerme crecer ante las adversidades y aprender a valorar a las personas. A Regla y Daimé, por ser oyentes de mis quejas, por la comprensión, las alegrías, el cariño y ayuda incondicional. A Patricia, Aniel, Joisel, Eduardo, Yonay, Yainet, el Peke, la Vivi y demás compañeros de aula, por acompañarme todo este tiempo, por cada fiesta o noche de estudio interminable, por las ocurrencias, por enseñarme a convivir, a ser un poco más tolerante, por su cariño y apoyo en momentos difíciles. A Yisly, Adriana, Ismaray, Ernesto y Tuté, por permitirme integrar las filas del Equipo Azul, por su jarana, su alegría, comprensión y ayuda en todo momento. A Ricardo y Reinaldo, por cada vivencia y enseñanza, el apoyo, inspiración de ser mejor persona y profesional. A Carlos, por su cariño, por hacerme reír con sus resabios, por permitirme ocupar un lugar especial en su vida, por demostrarme que aún existen más Luis Emilio soñadores y apasionados por ahí. A Rolando, porque a pesar de la distancia velarme en cada paso que doy, por quererme y sentirse orgulloso de mi. A todos mis profesores, por su exigencia, educación y preparación como profesional. A “5 de diciembre”, por permitirme bailar y aprender que la vida es más que un día tras otro, que el tiempo pasa, pero a pesar de eso todavía es posible soñar.. ….…….Nada hubiese sido posible sin ustedes, llegue a todos mis eterna gratitud………….
(9) vi. TAREA TÉCNICA. 1. Revisión bibliográfica sobre prótesis de miembro superior y sobre fatiga muscular. 2. Identificación y programación de un conjunto de clasificadores en la determinación de la intensión de movimiento. 3. Evaluación del desempeño de cada uno de los clasificadores en presencia de fatiga muscular. 4. Comparación del desempeño de los clasificadores. 5. Elaboración del informe final y presentación de los resultados.. Firma del Autor. Firma del Tutor.
(10) vii. RESUMEN. La señal electromiográfica es la señal eléctrica que producen los músculos en el proceso de contracción, y últimamente ha desarrollado su uso en el control de prótesis. Sin embargo existen factores que afectan el desempeño de estas prótesis a lo largo del tiempo, entre ellos la fatiga muscular. Hasta el momento no se ha hecho un estudio que permita evaluar algunas de las técnicas de clasificación más utilizadas ante las variaciones producidas por este factor. Este trabajo pretende determinar la influencia de la fatiga muscular en la señal electromiográfica y evaluar el comportamiento de la clasificación en la intensión de movimiento ante esta afectación en prótesis de miembro superior. Los resultados alanzados muestran la distorsión y corrimiento hacia las bajas frecuencias del espectro de la señal electromiográfica luego de ser inducida la fatiga muscular, y que esta a su vez provocó un error ascendente con el tiempo en el proceso de clasificación. De acuerdo a los aspectos analizados, el clasificador de K-vecinos más cercanos (83,56%) y el Análisis Discriminante Cuadrático (62,89%) resultaron los de mejor y peor desempeño, respectivamente, aunque mediante de un análisis estadístico se determinó que existen diferencias significativas en el desempeño del Análisis Discriminante Cuadrático con respecto a los demás clasificadores evaluados, no siendo así el caso del análisis entre estos últimos, haciéndose necesario la búsqueda de otras soluciones..
(11) viii TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................vi RESUMEN .......................................................................................................................... vii INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. REVISIÓN BIBLIOGRÁFICA ................................................................. 5. 1.1.. Señal Electromiográfica (EMG). ....................................................................... 5. 1.1.1.. Factores que afectan el desempeño de las prótesis mioeléctrica. ...................... 6. 1.1.1.1.. Fatiga muscular. ................................................................................................ 6. 1.2.. Reconocimiento de patrones. ............................................................................. 7. 1.2.1.. Extracción de rasgos o características. .............................................................. 8. 1.2.1.1.. Valor medio absoluto. ....................................................................................... 9. 1.2.1.2.. Cruces por cero. ................................................................................................. 9. 1.2.1.3.. Cambio de signo de la pendiente. .................................................................... 10. 1.2.1.4.. Longitud de la forma de onda. ......................................................................... 10. 1.2.2.. Clasificador de patrones. ................................................................................. 10. 1.2.2.1.. Tipología de los métodos de clasificación. ...................................................... 11. 1.2.2.1.1. Aproximación estadística. ............................................................................... 11 1.2.2.1.1.1. Análisis Discriminante Lineal ...................................................................... 12 1.2.2.1.1.2. Análisis Discriminante Cuadrático. ............................................................... 13 1.2.2.1.1.3.. K vecinos más cercanos........................................................................... 13.
(12) ix 1.2.2.1.1.4.. Clasificador de Parzen. ............................................................................ 15. 1.2.2.1.2. Aproximación sintáctica. ................................................................................. 16 1.2.2.1.3. Aproximación basada en aprendizaje. ........................................................... 16 1.2.2.1.3.1. 1.3.. Redes neuronales artificiales. .................................................................. 17. Conclusiones del capítulo ................................................................................ 18. CAPÍTULO 2.. MATERIALES Y MÉTODOS................................................................ 19. 2.1. Adquisición de la señal. ............................................................................................ 19 2.2. Descripción de la Base de Datos................................................................................ 21 2.3. Diseño del experimento. ............................................................................................ 22 2.4. Densidad Espectral de Potencia de la señal electromiográfica antes y luego de inducir la fatiga muscular. ................................................................................................ 22 2.5. Extracción de los rasgos a emplear. ........................................................................... 22 2.5.1. Valor medio absoluto. (𝑉𝑀𝐴) ............................................................................ 23 2.5.2. Cruces por cero. (𝐶𝑃𝐶) ........................................................................................... 23 2.5.3. Cambios de signo de la pendiente. (𝐶𝑃) ................................................................ 23 2.5.4. Longitud de la forma de onda. (𝐿𝑂) ....................................................................... 24 2.6. Mapeo bidimensional de cada una de las clases de movimiento. .............................. 24 2.7. Clasificadores empleados. ......................................................................................... 24 2.7.1. Análisis Discriminante Lineal. ............................................................................... 24 2.7.2. Análisis Discriminante Cuadrático. ....................................................................... 25 2.7.3. K- vecinos más cercanos......................................................................................... 25 2.7.4. Análisis de Componentes Principales- Análisis Discriminante Lineal. ................. 25 2.7.5. Clasificador de Parzen. ........................................................................................... 25 2.7.6. Red Neuronal Artificial. ......................................................................................... 26 2.8. Método para evaluar los clasificadores. ..................................................................... 26.
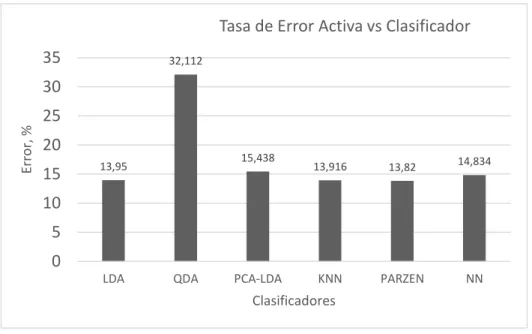
(13) x 2.8.1. Tasa de Clasificación Correcta. (TCC) ................................................................... 26 2.8.2. Tasa de Error Activa. (TEA) ................................................................................... 26 2.8.3. Complejidad Computacional del Cálculo. .............................................................. 26 2.9. Análisis estadístico. ................................................................................................... 26 2.10. Conclusiones del capítulo. ....................................................................................... 27 CAPÍTULO 3.. RESULTADOS Y DISCUSIÓN ............................................................. 28. 3.1. Análisis de la Densidad Espectral de Potencia (PSD) de la señal electromiográfica antes y luego de inducir fatiga muscular. ......................................................................... 28 3.2. Rasgos extraídos. ....................................................................................................... 29 3.3. Influencia de la fatiga muscular en la clasificación. .................................................. 30 3.4. Evaluación de los clasificadores empleados. ............................................................ 33 3.4.1. Tasa de Clasificación Correcta. (TCC) ................................................................... 33 3.4.2. Tasa de Error Activa. (TEA) ................................................................................... 36 3.4.3. Complejidad Computacional del Cálculo. .............................................................. 39 3.5. Análisis estadístico mediante la prueba de Kruskal-Wallis. ..................................... 40 3.6. Conclusiones del capítulo. ......................................................................................... 41 CONCLUSIONES ................................................................................................................ 42 Conclusiones ..................................................................................................................... 42 RECOMENDACIONES ....................................................................................................... 43 Recomendaciones ............................................................................................................. 43 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 44 ANEXOS .............................................................................................................................. 49 Anexo I. “Programación en Matlab para la extracción de los rasgos Valos Medio. Absoluto (mav), Cruces por Cero (zero_count), Longitud de onda (len) y Cambio de signo de la pendiente (turns).” .......................................................................................... 49.
(14) xi Anexo II “Representación del error de clasificación del Sujeto 1 para cada estrategia de clasificación.” ................................................................................................................... 51 Anexo III “Representación del error de clasificación del Sujeto 2 para cada estrategia de clasificación.” ................................................................................................................... 51 Anexo IV “Representación del error de clasificación del Sujeto 3 para cada estrategia de clasificación.” ............................................................................................................... 52 Anexo V. “Representación del error de clasificación del Sujeto 5 para cada estrategia de. clasificación.” ................................................................................................................... 52.
(15) INTRODUCCIÓN. 1. INTRODUCCIÓN. La señal mioeléctrica es la señal eléctrica que se produce en los músculos cuando estos se contraen. Esta señal, si bien tenue, es susceptible de ser medida con un equipo adecuado llamado electromiógrafo. Estas señales son usadas en muchas aplicaciones clínicas y biomédicas. El electromiograma es usado como una herramienta para diagnosticar enfermedades neuromusculares y desórdenes del control motor. Además se puede reconocer el habla de una persona con incapacidad para producir voz mediante la observación de la actividad del electromiograma, en los músculos asociados con el habla. Uno de los usos que se han dado a esta señal de electromiografía (EMG) en los últimos años ha sido en el campo de las prótesis mioeléctrica. Donde de manera global, han cobrado gran importancia los trabajos de investigación encaminados a la realización de interfaces hombremáquina especialmente diseñados para la ayuda a personas amputadas o con discapacidad, o para la ejecución de tareas sin contacto directo por parte del operario, y es entonces donde una de las formas para conseguir ese objetivo es la captación de señales electromiográficas provenientes de los músculos que están asociados cualitativamente con el tipo de movimiento producido. [1] Las causas más frecuentes de amputaciones en seres humanos son congénitas, por presencia de algún tumor, enfermedades, como por ejemplo la diabetes, y por traumatismo, debido a guerras y accidentes. En países como Estados Unidos, por ejemplo, que constituye el tercer país del mundo en área territorial y densidad poblacional, se realizan 50 000 amputaciones por año, de las cuales, 1 de cada 4 son de extremidades superiores, esto representa 4,9 por cada 1000 personas en la población total. Aproximadamente el 70% de las personas minusválidas o amputadas usa mano protésica regularmente. [2].
(16) INTRODUCCIÓN. 2. Dada la necesidad de esta parte de la población en el mundo, desde la década de 1960 se ha venido utilizando la señal EMG como señal de control para prótesis. Se denomina entonces prótesis mioeléctrica, a un sistema accionado por servomotores que se gobierna a partir de señales EMG, bien sean intramusculares, capturadas mediante agujas o superficiales, recogidas directamente sobre la superficie de la piel mediante electrodos. [3] Este tipo de prótesis son cada vez más aceptadas por personas con amputación de mano, porque permite a la persona que la utiliza su rehabilitación para desempeñarse activamente en su campo laboral. Para lograr esto se requiere también del acompañamiento continuo de un grupo de profesionales en el área médica, de la disponibilidad y esfuerzo mental y físico del paciente para obtener los mejores resultados. Las prótesis mioeléctrica han ido en incremento de acuerdo a sus aspectos mecánicos y electrónicos, pasando desde prótesis donde interactuaban solamente dos músculos, denominándoles “antagónicos” debido a que los electrodos conectados a cada uno de estos captaban la señal cuando el que estaba conectado al otro músculo dejaba de funcionar, lo cual constituía un gran problema para el correcto desempeño del dispositivo, siendo la solución más viable la implementación de prótesis con múltiples canales de recepción. Muchos trabajos comenzaron entonces con el denominado Reconocimiento de características o patrones en 1975 y seguidos en 1983 con la aplicación de técnicas de correlación. En 1995 se utilizó coeficientes espectrales obteniendo índices de éxito del 85 %. A partir de 1999 el departamento de Neuro-Ingeniería de la NASA desarrolló técnicas de reconocimiento de patrones EMG por medio de redes neuronales y modelos ocultos de Markov. En el año 2002 se desarrollaron técnicas de caracterización de señales EMG basadas en el modelamiento paramétrico, wavelets, y de reconocimiento con redes neuronales, y métodos estadísticos. [4] En el 2003, se desarrollaron trabajos para el entrenamiento de prótesis, y predicción de fatiga en los músculos, así como optimización en el diseño de los algoritmos de reconocimiento de patrones en tiempo real. [5] En estos algoritmos de extracción de características se pueden reconocer los implementados por Bernard Hudgins, Kevin Englehart y otros realizando aproximación temporal y modelamiento paramétrico, así como otros proyectos empleando aproximación espectral. Se emplearon también algoritmos de extracción de características basados en compresión con wavelets y wavelet packets..
(17) INTRODUCCIÓN. 3. Actualmente los trabajos de investigación en esta área están dirigidos a encontrar los algoritmos de procesamiento, caracterización, extracción y clasificación de patrones de dichas señales, que permitan el análisis y la determinación del tipo de movimiento, con porcentajes de acierto entre 80 % y el 97 % dependiendo del número de electrodos y del número de movimientos detectados.[1] Por otra parte, en el desarrollo de prótesis de miembro superior controlada por la señal EMG superficial existen varios factores de la actividad diaria que afectan, a largo plazo, la validez clínica de la prótesis. Las soluciones que se han desarrollado para atenuar este efecto están orientándose, fundamentalmente, al desarrollo de electrodos implantables, sin embargo, esta técnica, aunque con buenos resultados, es altamente invasiva y costosa. Esto condiciona que la búsqueda de soluciones que permitan mejorar el desempeño de las prótesis superficiales se lleve a cabo con mucha fuerza y a ello se dediquen diferentes grupos de investigación fundamentalmente en Norteamérica y Europa. La búsqueda de un control que minimice los errores en el desempeño de las prótesis ante los factores que afectan la señal electromiográfica a largo plazo, ha llevado a pensar en sistemas adaptativos como solución a este problema, los cuales se adecuen a los cambios que ocurren en dicha señal. Sin embargo, no se ha hecho un estudio que permita evaluar, de manera conjunta cuáles de las técnicas de clasificación desarrolladas, es más robusta a los cambios o variaciones producidos por estos factores a lo largo del tiempo, específicamente ante fatiga muscular. En esta investigación se evalúan las técnicas ya existentes ante un problema aún no resuelto, es decir ante las variaciones que puede tener la señal EMG producidos por estos factores de la actividad diaria, en este caso fatiga muscular, de donde pueden salir nuevas soluciones con un impacto inmediato en la población de amputados, con un costo menor que el que implica desarrollar técnicas nuevas. Definición del problema de investigación ¿Cómo influye la fatiga muscular en el desempeño a largo plazo de las prótesis controladas por EMG? ¿Cómo se comportan algunos de los clasificadores reportados en la literatura a largo plazo?.
(18) INTRODUCCIÓN. 4. Como Objetivo General se pretende evaluar el comportamiento de diferentes estrategias de clasificación de la señal EMG ante variaciones producidas por fatiga muscular y que afectan el desempeño de las prótesis de miembro superior a lo largo del tiempo. Objetivos Específicos . Determinar la influencia de la fatiga muscular en la señal electromiográfica.. . Evaluar el desempeño de cada una de las estrategias de clasificación ante los cambios a largo plazo en la señal EMG producidos por fatiga muscular.. Impacto posible - Este proyecto sienta las bases de una nueva línea de investigación en el CEETI. - Realizar un aporte metodológico en la evaluación de los factores de la vida diaria que afectan el desempeño de las prótesis de miembro superior controladas por EMG. - Contribuir a la formación de especialistas que, a más largo plazo, pudieran desarrollar este tipo de tecnología en Cuba. Organización del Informe El presente informe se encuentra dividido en Introducción, tres capítulos, Referencias Bibliográficas y Anexos. En la Introducción se especifica la importancia, y novedad del trabajo, además de los objetivos trazados para la conformación de este. El Capítulo 1 se muestra una pesquisa teórica necesaria para la comprensión del resto del informe. En el Capítulo 2 se exponen los materiales y métodos empleados para la realización práctica del experimento, y en el Capítulo 3 los resultados obtenidos en la investigación. Por último se encuentran las Referencias Bibliográficas utilizadas en la búsqueda de información y los Anexos del trabajo..
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. Actualmente las opciones protésicas existen para restaurar una o determinadas funciones para personas amputadas o con alguna patología física. Consecuentemente, muchos hacen una selección para usar dispositivos pasivos sencillos que no ofrecen funcionabilidad sino por los niveles de gran realismo. Otros optan por usar dispositivos, inicialmente concebidos durante la guerra civil americana, que usan movimientos para activar un cable gancho conducido. Por otra parte el uso de la señal mioeléctrica como una fuente de control para conducir próstesis energizadas es discutiblemente la opción más adelantada, aunque las opciones de control mioeléctrica más comercialmente disponibles han visto poco la progresión desde 1960. [6] Incrementar la precisión en el control de una prótesis, no solo la mioeléctrica, requiere también mejorar en las técnicas de clasificación de patrones a partir de la extracción de estos, parte complementaria y no menos importante en el diseño de un sistema de prótesis completo. En este capítulo se hace referencia a algunos de los conceptos y generalidades sobre la señales electromiográfica, algunos factores que la afectan a lo largo del tiempo, el proceso de Reconocimiento de patrones, el cual comprende la extracción de características y las técnicas de clasificación. 1.1. Señal Electromiográfica (EMG). Constituye la señal eléctrica que es producida por los músculos durante el proceso de contracción muscular. Estas señales son generadas por el intercambio de iones a través de las membranas de las fibras musculares debido a la propia contracción muscular. La técnica de electromiografía se desarrolla utilizando un instrumento médico llamado electromiógrafo, para producir un registro llamado electromiograma. Un electromiógrafo.
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. detecta el potencial de acción que activa las células musculares. Cuando éstas son activadas neural o eléctricamente, las señales pueden ser analizadas para detectar anormalidades y el nivel de activación, o analizar la biomecánica del movimiento de un humano o un animal. [7] La señal electromiográfica puede ser medida empleando elementos conductivos o electrodos sobre la superficie de la piel, o de una forma invasiva que sería sobre el propio músculo utilizando agujas. El método más común de medición es la electromiografía de superficie, pues constituye una manera no invasiva y puede realizarse con un mínimo de riesgo para el paciente. La amplitud de las señales EMG varía desde los µV hasta un bajo rango de mV (menor de 10mV). [8] 1.1.1. Factores que afectan el desempeño de las prótesis mioeléctrica. La amplitud y propiedades de las señales EMG que son captadas por la prótesis, tanto en el dominio del tiempo como en la frecuencia, dependen de factores tales como [9]: . El tiempo y la intensidad de la contracción muscular.. . La distancia entre el electrodo y la zona de actividad muscular.. . Las propiedades de la piel (por ejemplo el espesor de la piel y tejido adiposo).. . Las propiedades del electrodo y el amplificador.. . La calidad del contacto entre la piel y el electrodo.. Estos factores, que se encuentran usualmente englobados en los términos de fatiga muscular, mal acople de la interfaz electrodo-piel, variaciones en la impedancia de la piel y corrimiento de los electrodos, y son, en primera instancia causales de las variaciones en el desempeño a largo plazo de las prótesis controladas por electromiografía. 1.1.1.1.. Fatiga muscular.. La fatiga muscular se define como la disminución reversible de la capacidad del músculo para generar fuerza. La fatiga muscular depende del tipo de ejercicio efectuado, dichos cambios que pueden causar fatiga comprenden [10]: . Aumento de la concentración de PO43-, derivado de la desintegración de fosfocreatina, en el citoplasma. Se cree que esto reduce la fuerza creada por puentes, y contribuidor importante en la fatiga muscular.. . Declinación de ATP, en la unión de túbulos transversos y retículo sarcoplastmático, lo cual obstaculiza la acción de las bombas de Ca2+. El ATP.
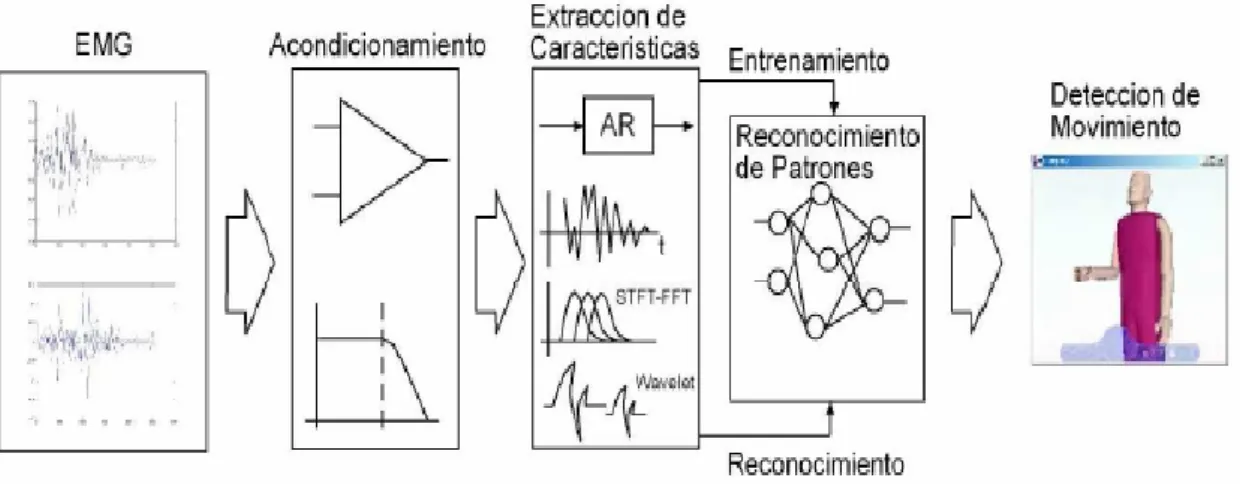
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. declina rápidamente en fibras de contracción rápida durante el ejercicio sin producir rigor; en cambio declina de manera medible en fibras de contracción lenta. . Agotamiento de glucógeno muscular. Este mecanismo no se comprende por completo, pero parece disminuir la liberación de Ca2+ desde el retículo sarcoplasmático.. . Disminución de la entrada de O2 al cuerpo, lo cual aumenta el ADP en el citoplasma. Causa disminución de la velocidad de acortamiento muscular durante la fatiga muscular.. Desde los años 70 se han realizado investigaciones sobre la influencia de la fatiga muscular a partir de un análisis espectral de las señales antes y luego de ser afectadas, tales son los casos de Worden Waring en su artículo: “Spectrum Analysis of the myoelectric signal” en 1972, A. F. Mannion; B. Connolly, K. Wood y P. Dolan en “The use of surface EMG power spectral analysis in the evaluation of back muscle function” en 1997; L. Pinheiro da Silva y F. Kassab, Jr. en “Myoelectric Signal Classification based on its Normalized Power Spectral Density” en 2003 y por último, por solo citar algunos, Fernández, J.M. en “Influencia de la fatiga muscular en la señal electromiográfica de músculos estimulados eléctricamente” en el 2007. Todos estos trabajos en su colofón muestran que a partir de un análisis espectral de la señal antes y posterior de influir la fatiga, van a evidenciar un corrimiento del espectro hacia las bajas frecuencias y una compresión del mismo. 1.2. Reconocimiento de patrones. Al Reconocimiento de patrones llamado también lectura de patrones, identificación de figuras y reconocimiento de formas consiste en el reconocer características en las señales. Los patrones se obtienen a partir de los procesos de segmentación, extracción de características y descripción donde cada objeto queda representado por una colección de descriptores. El sistema de reconocimiento debe asignar a cada objeto su categoría o clase (conjunto de entidades que comparten alguna característica que las diferencia del resto). Para poder reconocer los patrones se siguen los siguientes procesos, [11]: 1. adquisición de datos 2. extracción de características.
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. 3. clasificación El punto esencial del Reconocimiento de patrones es la clasificación: se quiere clasificar una señal dependiendo de sus características. En la siguiente figura, [12], se muestra un esquema que representa el sistema básico de Reconocimiento de patrones.. Fig.1.2.1. Sistema básico de reconocimiento.. El Reconocimiento de patrones en señales EMG comprende de manera más específica los pasos siguientes [13]: la detección y pre-procesamiento de los datos, el enventanado de estos, la extracción de los rasgos, la reducción de la dimensionalidad, la clasificación, el post-procesamiento y el control proporcional. En los problemas de Reconocimiento de patrones, un vector de rasgos de orden alto puede ser una problemática, “la maldición de la dimensionalidad”: el espacio dimensional alto requiere más datos de entrenamiento que el espacio dimensional bajo para asegurar límites de decisión densos y, por consiguiente, que los límites de decisión generalicen bien a los nuevos datos. Por consiguiente, es necesario el empleo de las técnicas de reducción de rasgos. Es deseable usar las técnicas de reducción de rasgos por dos razones: 1) las sesiones de entrenamiento más cortas son más convenientes para un usuario de la próstesis y 2) menos rasgos pueden mejorar la actuación en tiempo real del clasificador. [14] 1.2.1. Extracción de rasgos o características. Es el proceso de generar características que puedan ser usadas en el proceso de clasificación de los datos. En ocasiones viene precedido por un pre-procesado de la señal, necesario para corregir posibles deficiencias en los datos debido a errores del sensor, o bien para preparar los datos de cara a posteriores procesos en las etapas de extracción de características o clasificación..
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. Las características elementales están explícitamente presentes en los datos adquiridos y pueden ser pasados directamente a la etapa de clasificación. Las características de alto orden son derivadas de las elementales y son generadas por manipulaciones o transformaciones en los datos. [15] Normalmente las señales en el tiempo son de duración limitada y se encuentran muestreadas y convertidas en formato digital. En tales situaciones es más apropiado representar un patrón como una secuencia de tiempo finita x [1], x [2],..., x[n]. El presentar esta secuencia directamente al clasificador es algo impráctico debido al gran número de entradas y a la aleatoriedad de la señal. Por lo tanto, la secuencia x(n) debe ser reducida a un vector x=(x1, x2,..., xd ), con d << n, llamado vector de características, el cual caracteriza la señal y permite que el clasificador presente un entrenamiento estable, y se logre una clasificación con buen porcentaje de acierto. [15] Se pueden considerar generalmente dos métodos para la extracción de características: aproximación paramétrica y no paramétrica. Dentro de la aproximación paramétrica se tienen modelos tales como AR (autorregresive model), MA (moving average) y ARMA. En la aproximación no paramétrica se consideran dos métodos: aproximación temporal y aproximación espectral, aunque también pueden ser considerados métodos de aproximación tiempo-frecuencia. [1] Precisamente algunas características referidas a la aproximación temporal tales como el valor medio absoluto, cruces por cero, cambio de signo de la pendiente y longitud de forma de onda, son empleadas en nuestra investigación. 1.2.1.1.Valor medio absoluto. Constituye el valor medio tomado sobre un período de una magnitud alterna determinada. Es un valor estimado a partir de un promedio de valores de la señal en un número determinado de muestras en un segmento de esta. 1.2.1.2. Cruces por cero. Es una forma simple de medir la frecuencia de la señal, puede determinarse contando el número de veces que la forma de onda cruza por cero. Se requiere un umbral para reducir el número de cruces por cero inducidos por ruido, y se selecciona con respecto al voltaje de la señal. [3].
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. Los cruces por cero indican el número de veces que una señal continua toma el valor de cero. Para las señales discretas, un cruce por cero ocurre cuando dos muestras consecutivas difieren de signo, o bien una muestra toma el valor de cero. [16] 1.2.1.3. Cambio de signo de la pendiente. La pendiente, basándonos en términos matemáticos, constituye la inclinación de una recta de acuerdo a la horizontal en un eje cartesiano. Provee otra forma de medir el contenido de frecuencia en la señal mediante el conteo del número de veces que la pendiente de la forma de onda cambia de signo. Igualmente requiere de un umbral para reducir los cambios de signo de pendiente inducidos por el ruido. [3] En nuestro trabajo hacemos referencia a esta característica como el número de veces en que la señal EMG cambia su estado desde una pendiente creciente a una decreciente, o viceversa. 1.2.1.4. Longitud de la forma de onda. Es la distancia que hay entre el mismo punto de dos ondulaciones consecutivas, o la distancia entre dos crestas consecutivas. [17] Constituye otra característica importante que provee información acerca de la complejidad de la señal. El valor resultante da una medida de la amplitud de la forma de onda, su frecuencia y duración en un solo parámetro. [3] 1.2.2. Clasificador de patrones. Constituye un bloque de salida en la toma de decisiones a partir de un vector del espacio de entrada que está conformado por una serie de características resultantes del proceso de extracción de patrones en las señales. Existen disimiles de clasificadores que son empleados en el reconocimiento de patrones de las prótesis mioeléctricas, en la siguiente tabla se muestran algunos de estos, con sus respectivas referencias donde fueron extraídos los datos y sus desempeños de acuerdo a su porcentaje de clasificación correcta, todos obtenidos en diferentes experimentos y condiciones..
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. Tabla 1.2.2.1. Desempeños de los clasificadores más empleados en prótesis mioeléctricas. Clasificador. Referencias. LDA. [18],[19],[20],[21], [22],[23] 86.1, 93.5, 98, 97, 84.62, 89. Máquinas de Soporte [22], [24],[25]. Desempeños (%). 93.5, 79.4, 87.5. Vectorial QDA. [26], [27],[28]. 82.4, 96, 87. Lógica difusa. [23] , [29],[30]. 91, 82, 94. K-NN. [27],[28], [31],[32], [33]. 88.9, 87, 94, 93.16, 86. Clasificador bayesiano [22],[29], [33]. 90, 90.44, 92.9. Parzen. 95, 87.69, 88. Red. [22], [28][33]. Neuronal [21],[22],[23],[25],[31], [33] 89, 94.5, 90, 97.6, 83.88, 88.5. Backpropagation. Modelos de Mezclas [22],[28]. 95.5, 92.1. Gaussianas. 1.2.2.1.Tipología de los métodos de clasificación. La teoría de la clasificación distingue entre tres tipos de clasificadores. Se comentan en primer lugar la aproximación estadística (o teoría de la decisión), después la aproximación estructural (sintáctica) y finalmente la de aprendizaje. 1.2.2.1.1. Aproximación estadística. Está basado en el análisis estadístico de los datos a ser clasificados. A partir de la colección de datos de entrenamiento se intenta inferir la función de densidad de probabilidad para cada clase. Todos los patrones que se sabe que pertenecen a una clase (porque son patrones de entrenamiento, que por eso mismo se conocen) no son sino realizaciones de un proceso estocástico. Hay varios criterios para dividir el espacio de la.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. señal de entrada, pero en general se distinguirá entre clasificadores paramétricos y clasificadores no paramétricos. Los clasificadores paramétricos asumen una función de densidad probabilística parametrizada para los datos, en tanto que los no paramétricos no presumen forma de la función alguna. [34] Entre los distintos clasificadores que emplean esta aproximación estadística no paramétrica encontramos el Análisis Discriminante Lineal (LDA) y el Cuadrático (QDA), el Clasificador bayesiano, el Modelo de mezcla gaussiana, K-vecinos más cercanos (Knn), y el Clasificador de Parzen. 1.2.2.1.1.1. Análisis Discriminante Lineal Un clasificador lineal logra usar las características de un objeto para identificar a qué clase (o grupo) pertenece tomando una decisión de clasificación basada en el valor de una combinación lineal de sus características. Las características de un objeto son típicamente presentadas en un vector llamado vector de características. LDA es una versión simplificada de QDA, haciéndose cargo de la covarianza común de clase. [35] Si la entrada del clasificador es un vector de características reales 𝑥⃗, entonces el resultado de salida es, [36]: (1) 𝑦 = 𝑓(𝑤 ⃗⃗⃗. 𝑥⃗) = 𝑓 (∑ 𝑤𝑗 𝑥𝑗 ) 𝑗. , donde 𝑤 ⃗⃗⃗ es un vector real de pesos y 𝑓 es una función que convierte el producto punto a punto de los dos vectores en la salida deseada. El vector de pesos aprende de un conjunto de muestras de entrenamiento. A menudo 𝑓 es una función simple que mapea todos los valores por encima de un cierto umbral a la primera clase y el resto a la segunda clase. Una 𝑓 más compleja puede dar la probabilidad de que una muestra pertenezca a cierta clase. Los clasificadores lineales se suelen usar en situaciones donde la velocidad de la clasificación es importante, ya que a menudo es el clasificador más rápido, especialmente cuando 𝑥⃗ es disperso. Además, los clasificadores lineales con frecuencia funcionan muy bien cuando el número de dimensiones de 𝑥⃗ es grande, como en clasificación de documentos, donde típicamente cada elemento en 𝑥⃗ es el número de apariciones de una palabra en un documento. En tales casos, el clasificador debe estar bien regularizado. [36].
(27) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 13. El Análisis Discriminante Lineal maneja fácilmente el caso en el que las frecuencias dentro de la clase no son iguales y sus actuaciones han sido examinadas en los datos de prueba generados aleatoriamente. Este método maximiza la relación de la varianza entre las clases a la varianza dentro de clase en los datos particulares definidas garantizando de este modo separabilidad máxima, con este criterio los ejes del espacio transformado se definen. Además, se describen dos métodos para transformar los conjuntos de datos y clasificar los vectores de prueba en el espacio transformado: a) transformación de clase dependiente, que maximiza la proporción de varianza entre clases dentro de varianza clase y b) la transformación de clase independiente, que maximiza la relación de la varianza total de la varianza dentro de la clase y cada clase se considera como una clase separada en contra de todas las demás clases. [37] El LDA (también conocido como Fishers LDA) utiliza hiperplanos para separar los datos representación de las distintas clases. El hiperplano de separación se obtiene mediante la búsqueda de la proyección que maximiza la distancia entre las dos clases de medios y minimiza la varianza intraclase. [38] 1.2.2.1.1.2. Análisis Discriminante Cuadrático. El Análisis Discriminante Cuadrático tiene el mismo procedimiento básico que el Análisis Discriminante Lineal, pero con la diferencia de que este supone que los dos grupos tienen distribuciones normales pero varianzas diferentes. El QDA es un clasificador estadístico de combinaciones que busca características óptimamente selectivas entre las clases. [36] Para algunos juegos de los datos, las regiones para las varias clases no son bien separadas. Cuando ése es el caso, el Análisis Discriminante Lineal no es apropiado, en cambio, puede probar el Análisis Discriminante Cuadrático. 1.2.2.1.1.3. K vecinos más cercanos. En el método K- vecinos más cercanos es un método de clasificación supervisada para el aprendizaje y estimación basada en un conjunto de entrenamiento y prototipos, que sirve para estimar la función de densidad 𝐹 (𝑥⁄𝐶 ) de las predictoras 𝑥 por cada clase 𝐶𝑗 , [39]. 𝑗.
(28) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. Este es un método de clasificación no paramétrico, que estima el valor de la función de densidad de probabilidad o directamente la probabilidad a posteriori de que un elemento pertenezca a la clase partir de la información proporcionada por el conjunto de prototipos. En el reconocimiento de patrones, el algoritmo K-nn es usado como método de clasificación de objetos (elementos) basado en un entrenamiento mediante ejemplos cercanos en el espacio de los elementos. K-nn es un tipo de "Lazy Learning", donde la función se aproxima solo localmente y todo el cómputo es diferido a la clasificación. [40] Es un proceso para asignar un punto de patrón a una clase a la que pertenece su vecino más cercano. Si la membresía se decide por mayoría de votos de los K-vecinos más cercanos, el procedimiento se llama una regla de decisión vecino K-más cercano. El algoritmo consiste en dos etapas: a) hacer pre agrupación de los datos para obtener subclusters mediante el uso de la distancia euclídea y b) fusionar los subgrupos jerárquicamente mediante el uso de una medida de similitud. [41] El método K-nn se resume en dos algoritmos, [41]: . Algoritmo de entrenamiento. Para cada ejemplo < 𝑥, 𝑓(𝑥) >, donde 𝑥є𝑋, agregar el ejemplo a la estructura representando los ejemplos de aprendizaje. . Algoritmo de clasificación. Dado un ejemplar 𝑥𝑞 que debe ser clasificado, sean 𝑥1 , … , 𝑥𝑘 los k vecinos más cercanos a 𝑥𝑞 en los ejemplos de aprendizaje, regresar 𝑘. (2). 𝑓(𝑥) ← 𝑎𝑟𝑔𝑚𝑎𝑥𝑣є𝑉 ∑ 𝛿(𝑣, 𝑓(𝑥1 )) 𝑖=1. , donde 𝛿(𝑎, 𝑏) = 1 si 𝑎 = 𝑏 ; y 0 en cualquier otro caso. El valor 𝑓̂(𝑥𝑞 ) devuelto por el algoritmo como un estimador de 𝑓̂(𝑥𝑞 )es solo el valor más común de 𝑓 entre los K vecinos más cercanos a 𝑥𝑞 . Si elegimos K=1; entonces el vecino más cercano a 𝑥𝑖 determina su valor. La mejor elección de K depende fundamentalmente de los datos; generalmente, valores grandes de K reducen el efecto de ruido en la clasificación, pero crean límites entre clases parecidas. Un buen K puede ser seleccionado mediante una optimización de uso..
(29) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 15. La exactitud de este algoritmo puede ser severamente degradada por la presencia de ruido o características irrelevantes, o si las escalas de características no son consistentes con lo que uno considera importante. Muchas investigaciones y esfuerzos fueron puestos en la selección. y crecimiento de características para mejorar las clasificaciones.. Particularmente una aproximación en el uso de algoritmos que evolucionan para optimizar características de escalabilidad. Otra aproximación consiste en escalar características por la información mutua de los datos de entrenamiento con las clases de entrenamiento. Esta mejora es muy efectiva en muchos problemas prácticos. Es robusto ante los ruidos de datos y suficientemente efectivo en conjuntos de datos grandes. Se puede ver que al tomar promedios ponderados de los K- vecinos más cercanos el algoritmo puede evitar el impacto de ejemplos con ruido aislados. [40] Este algoritmo funciona siguiendo un modelo basado en la memoria. La memoria guarda un conjunto de objetos o instancias que forman parte del entrenamiento. Para cada uno de estos objetos, se sabe cuál es su salida, esto es, los objetos están etiquetados. Cada ejemplo contiene un conjunto de valores independientes que producen un conjunto de salida dependiente de ellos. Cuando las variables dependientes son continuas, se dice que la tarea a tratar es regresión. De lo contrario se trata de clasificación. Por ende este algoritmo puede manejar tantas tareas de regresión y de clasificación. [40] Dado un conjunto nuevo de valores independientes se busca estimar mediante los K vecinos más cercanos, la salida de este. Esto se logra encontrando K ejemplos de entrenamiento, que en distancia estén más cercanos al objeto a clasificar, de allí el nombre K vecinos más cercanos. [41] 1.2.2.1.1.4. Clasificador de Parzen. Un Clasificador Parzen estima de manera no paramétrica las funciones de densidad de probabilidad de clase usando estimación de densidad del kernel. [31] Se trata de un clasificador basado en la estimación no paramétrica, que a diferencia de la paramétrica, donde se obtiene la función de densidad de probabilidad estimando los parámetros desconocidos de un modelo conocido, no se conoce el modelo. Esta técnica consiste básicamente en variaciones de la aproximación del histograma de una función de densidad de probabilidad desconocida. Este algoritmo se utiliza en la clasificación de imágenes o para clasificar y aprender simultáneamente. El problema de este clasificador es que tiene un tiempo de ejecución elevado. [43].
(30) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 16. Se sabe que de la estimación densidad Parzen es una herramienta efectiva para estimar el error de Bayes, dado un círculo de entrenamiento toma muestras de las distribuciones de clase. Es un algoritmo desarrollado para seleccionar un número dado de ejemplos representativos cuya estimación de densidad de Parzen hace juego con el set de muestra entero. [44] El clasificador de Parzen es de fácil implementación y alta habilidad para solucionar problemas no lineales de clasificación. La selección de rasgo es una elección crítica del clasificador, porque este introduce la medida de distancia entre los ejemplos. [43] 1.2.2.1.2. Aproximación sintáctica. La aproximación sintáctica, por otra parte, está basada en utilizar la estructura de los patrones y la interrelación entre las componentes de un patrón. El reconocimiento de patrones sintáctico implica identificar componentes significativas o primitivas de los patrones, y desarrollar una sintaxis formal o gramática describiendo la síntesis de los patrones a partir de sus primitivas. El paralelismo con la teoría del lenguaje es clarificador: primitivas=palabras, señales=sentencias, descripción estructural=gramática, etc. La aproximación estadística asume muy pocas cosas acerca de la estructura de los datos bajo consideración, los métodos sintácticos tratan de hacerlo tan bien como pueden. En todo caso, lo que es natural para los humanos es muy complejo de procesar en las máquinas y es difícil programar analizadores sintácticos; frente a los métodos estadísticos que se prestan perfectamente a la computación. El problema realmente difícil es extraer las características de la señal que permitan este análisis, la clasificación luego debería ser más sencilla. [34]. Esta aproximación tan sólo se utiliza en técnicas aisladas de procesado de la señal de video y similares, donde hay formas bien delimitadas, bordes etc., que han de ser reconocidos. 1.2.2.1.3. Aproximación basada en aprendizaje. Los algoritmos capaces de aprender toman la forma de Redes Neuronales Artificiales (RNA) o de Lógica Difusa. También encontramos referidos a esta tipología de aproximación las Máquinas de Soporte Vectorial y el Modelo Oculto de Markov. Los algoritmos anteriormente dichos pueden ser llamados también determinísticos en oposición a las estadísticas, porque los algoritmos de aprendizaje no asumen nada acerca de las propiedades estadísticas de los patrones del espacio de la señal de entrada..
(31) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 17. 1.2.2.1.3.1. Redes neuronales artificiales. Una Red Neuronal Artificial es un sistema de procesadores paralelos conectados entre sí en forma de grafo dirigido. Esquemáticamente cada elemento de procesamiento (neuronas) de la red se representa como un nodo. Estas conexiones establecen una estructura jerárquica que tratando de emularla fisiología del cerebro busca nuevos modelos de procesamiento para solucionar problemas concretos del mundo real. Lo importante en el desarrollo de la técnica de las RNA es su útil comportamiento al aprender, reconocer y aplicar relaciones entre objetos y tramas de objetos propios del mundo real. [45] Constituyen un sistema computacional inspirado en las características de aprendizaje y estructura de la red neuronal biológica. Las RNA tienen características como: generalización y habilidad para aprender de la experiencia sin requerir un modelo matemático a priori de las características de la señal, adaptación a los cambios de condiciones ambientales y habilidad para procesar datos degradados o incompletos, lo que las hace apropiadas para señales críticas como las señales EMG. Sin embargo, las RNA requieren de un gran número de muestras y mucho tiempo de entrenamiento para un aprendizaje adecuado. [46] Las Redes Neuronales Artificiales son modelos que intentan reproducir el comportamiento del cerebro. Como tal modelo, realiza una simplificación, averiguando cuáles son los elementos relevantes del sistema, bien porque la cantidad de información de que se dispone es excesiva o bien porque es redundante. [47] Existen cuatro aspectos que caracterizan una RNA: su topología, el mecanismo de aprendizaje, tipo de asociación realizada entre la información de entrada y salida, y la forma de representación de estas informaciones, [48] [49]: . Redes Monocapa: Se establecen conexiones laterales, cruzadas o autorrecurrentes entre las neuronas que pertenecen a la única capa que constituye la red. Se utilizan en tareas relacionadas con lo que se conoce como autoasociación; por ejemplo, para generar informaciones de entrada que se presentan a la red incompleta o distorsionada.. . Redes Multicapa: Son aquellas que disponen de conjuntos de neuronas agrupadas en varios niveles o capas. Una forma de distinguir la capa a la que pertenece la neurona, consiste en fijarse en el origen de las señales que recibe a la entrada y el.
(32) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 18. destino de la señal de salida. Según el tipo de conexión se distinguen las redes feed-forward, y las redes feed-forward/feedback. . Topología: La arquitectura de las RNA consiste en la organización y disposición de las neuronas formando capas más o menos alejadas de la entrada y salida de la red. En este sentido, los parámetros fundamentales de la red son: el número de capas, el número de neuronas por capa, el grado de conectividad y el tipo de conexiones entre neuronas.. . Mecanismo de Aprendizaje. El aprendizaje es el proceso por el cual una red neuronal modifica sus pesos en respuesta a una información de entrada. Los cambios que se producen durante el proceso de aprendizaje se reducen a la destrucción, modificación y creación de conexiones entre las neuronas, la creación de una nueva conexión implica que el peso de la misma pasa a tener un valor distinto de cero, una conexión se destruye cuando su peso pasa a ser cero. Se puede afirmar que el proceso de aprendizaje ha finalizado (la red ha aprendido) cuando los valores de los pesos permanecen estables.. 1.3. Conclusiones del capítulo . Las prótesis mioeléctricas ven afectado su desempeño por varios factores entre los que se encuentra la fatiga muscular.. . El Reconocimiento de patrones contiene entre sus principales pasos la adquisición de los datos, la extracción de características o rasgos y la clasificación.. . El valor medio absoluto, cruces por cero, cambios de signo de la pendiente y la longitud de la forma de onda constituyen rasgos del dominio temporal no paramétricos.. . La clasificación trata de asignar las diferentes partes del vector de características a grupos o clases, basándose en las características extraídas. Haciéndose alusión al Análisis Discriminante Lineal y el Cuadrático, K-vecinos más cercanos, Análisis de Componentes Principales, el Clasificador de Parzen y Redes Neuronales Artificiales..
(33) CAPÍTULO 2. MATERIALES Y MÉTODOS. 19. CAPÍTULO 2. MATERIALES Y MÉTODOS. En este capítulo se hace referencia al proceso de adquisición de la señal, se realiza una breve descripción de la Base de Datos, se expone cómo fue diseñado el experimento, la búsqueda de la Densidad Espectral de Potencia en las señales, cómo se realiza el proceso de extracción de los rasgos empleados y un mapeo bidimensional de estos por clases. Se expone cómo se efectuó la clasificación, los métodos empleados para evaluar las estrategias de clasificación, y por último un análisis estadístico para determinar diferencias significativas entre los desempeños de los clasificadores utilizados. 2.1. Adquisición de la señal. Primeramente se realiza la adquisición de la señal electromiográfica del sistema fisiológico brazo-antebrazo para permitir su procesamiento digital en una PC. Para esto se utilizó un modelo típico de instrumentación constituido por sensores, encargados de la captación de la señal, amplificadores y filtros, en la etapa de acondicionamiento, conversor análogo digital con tarjeta de adquisición de datos y procesamiento, para realizar el proceso de Reconocimiento de patrones teniendo como finalidad la detección de un determinado movimiento, ver Figura 2.1.1, [15]. Luego de digitalizadas dichas señales, se conformó la Base de Datos.. Fig. 2.1.1. Esquema general del proyecto..
(34) CAPÍTULO 2. MATERIALES Y MÉTODOS. 20. Los filtros empleados en esta etapa son un Filtro Paso Alto de Butterwoth de orden 3 y frecuencia de corte de 20Hz y un Filtro Notch con un factor de calidad (Q) igual a 1, con aproximación de Butterworth de divididos en 3 secciones cada una de orden 2, para eliminar el ruido en los tres primeros armónicos impares de la línea de alimentación que es donde se concentra la mayor parte de la energía en las señales electromiográficas, sus respectivas funciones de transferencias y respuestas de magnitud se muestran a continuación: Filtro Paso Alto de Butterwoth:. 𝐻(𝑧) =. 0,9391 − 2,8173𝑧 −1 + 2,8173𝑧 −2 − 0,9391𝑧 −3 1 − 2,8744𝑧 −1 + 2,7565𝑧 −2 − 0,8819𝑧 −3. (3). Filtro Notch con aproximación de Butterworth de divididos en 3 secciones: 0,9845 − 1,9344𝑧 −1 + 0,9845𝑧 −2 1 − 1,9344𝑧 −1 + 0,9691𝑧 −2. (4). 0,9845 − 1,6627𝑧 −1 + 0,9845𝑧 −2 𝐻(𝑧)2 = 1 − 1,6627𝑧 −1 + 0,9691𝑧 −2. (5). 0,9845 − 1,1575𝑧 −1 + 0,9845𝑧 −2 1 − 1,1575𝑧 −1 + 0,9691𝑧 −2. (6). 𝐻(𝑧)1 =. 𝐻(𝑧)3 =. Fig.2.1.2. Respuesta de frecuencia en magnitud del Filtro Paso Alto de Butterwoth..
(35) CAPÍTULO 2. MATERIALES Y MÉTODOS. 21. Fig.2.1.3. Respuesta de frecuencia en magnitud del Filtro Notch. 2.2. Descripción de la Base de Datos. La Base de Datos fue conformada a partir de la adquisición de los mismos, en señales electromiográficas afectadas por la fatiga muscular, en 5 sujetos sanos de ambos sexos, con edades comprendidas entre los 24 y 36 años. Las señales fueros captadas con el empleo de 6 electrodos superficiales de Ag/AgCl, los cuales son revestidos con un gel que facilita el contacto entre el propio electrodo y la superficie de la piel, permitiendo que la corriente emitida por el músculo pase libremente a través de la juntura entre el gel electrolito y el electrodo. Estos fueron colocados equidistantemente alrededor del antebrazo, separados 2 pulgadas del codo, para captar 6 canales de señales electromiográficas. Se empleó el sistema comercial de adquisición Delsys para captar las señales electromiográficas, con una instrumentación semejante a la mostrada en la Figura 2.1.1. La frecuencia de muestreo empleada en cada señal es de 2kHz con una resolución de 16 bits/muestra. En este experimento se graban 30 segundos de señal de cada una de las 8 clases de movimientos en las que se basó el experimento: No movimiento, Flexión, Extensión, Supinación y Pronación de la muñeca, Puño cerrado y Agarre de pinzas, teniendo a su vez 6 repeticiones por clase. Para entrenar cada uno de los clasificadores se utilizan los primeros 3 segundos de cada.
(36) CAPÍTULO 2. MATERIALES Y MÉTODOS. 22. clase y se realiza una verificación del desempeño de la clasificación cada 3 segundos. 2.3. Diseño del experimento. En el experimento cada uno de los sujetos realiza varias repeticiones de cada uno de los movimientos a evaluar, durante un tiempo que va incrementándose. Primeramente se limpió con alcohol isopropílico la superficie de la piel para aumentar la calidad de la interfaz piel-electrodo. El experimento se realiza a una temperatura de 20°C, para evitar la sudoración y con ella el cambio de impedancia de la piel, y se emplea una banda elástica para ubicar los electrodos y evitar su corrimiento. Así, se realizan 8 repeticiones de 3 segundos de duración de cada una de las contracciones, seguidamente se realizan 4 repeticiones de 10 segundos de duración para cada contracción y por último 4 repeticiones de 30 segundos cada una. En todos los casos el tiempo entre estas es de 2 segundos. Este proceder debe ir incrementando los niveles de fatiga muscular progresivamente como usualmente ocurre en usuarios amputados en la realización de actividades de la vida cotidiana. 2.4. Densidad Espectral de Potencia de la señal electromiográfica antes y luego de inducir la fatiga muscular. Este análisis se efectúa a través de la búsqueda de la Densidad Espectral de Potencia de las señales antes y luego de inducir la fatiga muscular para cada clase de movimiento en sus respectivos sujetos, esto permitirá observar cómo queda distribuida la energía en la señal electromiográfica así como si existe alguna variación en su magnitud para ambos casos. La función que se emplea se encuentra en el software Matlab en su versión 7.0.10 2.5. Extracción de los rasgos a emplear. El proceso de extracción de los rasgos o las características se enmarca en cuatro de estos específicamente: valor medio absoluto, cruces por cero, cambios de signo de la pendiente de la señal y la longitud de la forma de onda de esta, los cuales a partir de sus respectivas ecuaciones matemáticas, [1], definidas en este capítulo, fueron implementados con el software Matlab en su versión 7.0.10, su codificación se muestra en el Anexo I. Al pertenecer estos rasgos al dominio temporal, permite realizar una posterior evaluación.
(37) CAPÍTULO 2. MATERIALES Y MÉTODOS. 23. del desempeño de las estrategias de clasificación en cada una de las clases de movimientos a lo largo del tiempo. 2.5.1. Valor medio absoluto. (𝑽𝑴𝑨) Un estimado del valor medio absoluto de la señal x en el segmento 𝑖 de 𝑁 muestras está dado por: 𝑁. (7). 1 𝑉𝑀𝐴 = ∑|𝑋𝑖 | 𝑁 𝑖=1. , donde 𝑋𝑖 son las muestras y 𝑁 el número de muestras. 2.5.2. Cruces por cero. (𝑪𝑷𝑪) Una idea de la frecuencia de una señal puede ser obtenida a partir del número de veces que la señal pasa por cero. Un umbral 𝑡ℎ debe ser definido para reducir los cruces por cero por consecuencia del ruido. 𝑁. 𝐶𝑃𝐶 = ∑ 𝑠𝑔𝑛(−𝑋𝑖 ∗ 𝑋𝑖+1 ) ;. 𝑠𝑔𝑛 = {. 𝑖=1. 1, 0,. (8). 𝑥 > 𝑡ℎ 𝑜𝑡𝑟𝑜𝑠. , donde 𝑋𝑖 son las muestras, 𝑁 es la longitud de la señal y 𝑡ℎ umbral, igual al 5% del valor de la amplitud promedio de la señal. 2.5.3. Cambios de signo de la pendiente. (𝑪𝑷) Otra característica que puede dar idea sobre el contenido de frecuencia de una señal puede ser el número de veces que cambia de signo la pendiente de esta, es decir cuántas veces pasa de un estado creciente a decreciente, o viceversa. Es recomendable seleccionar un umbral 𝑡ℎ para reducir los cambios de signo de la pendiente inducidos por el ruido. 𝑁. 𝐶𝑃 = ∑ 𝑠𝑔𝑛(𝑋𝑖+1 − 𝑋𝑖 ) ∗ (𝑋𝑖+2 − 𝑋𝑖+1 ) ; 𝑖=1. 𝑠𝑔𝑛 = {. 1, 0,. 𝑥 > 𝑡ℎ 𝑥 < 𝑡ℎ. (9). , donde 𝑋𝑖 son las muestras, 𝑁 es la longitud de la señal y 𝑡ℎ umbral, igual al 5% del valor de la amplitud promedio de la señal..
(38) CAPÍTULO 2. MATERIALES Y MÉTODOS. 24. 2.5.4. Longitud de la forma de onda. (𝑳𝑶) Una característica que provee información acerca de la complejidad de una señal en un segmento de esta es la longitud de la forma de la onda. 𝑁. 𝐿𝑂 = ∑|∆𝑋𝑖 | ;. (10) ∆𝑋𝑖 = 𝑋𝑖 − 𝑋𝑖−1. 𝑖=1. , donde 𝑋𝑖 : muestras y 𝑁 es la longitud de la onda. 2.6. Mapeo bidimensional de cada una de las clases de movimiento. Se realiza un mapeo bidimensional de las clases de movimientos con las señales de los respectivos pacientes. Se emplea un mapa de Sammon, el cual se encuentra implementado en el software Matlab y realiza un redimensionamiento de la matriz de rasgos extraídos para cada clase de movimiento, lo cual lo muestra en un espacio bidimensional cada 3 segundos de la señal, es decir nuestra matriz de rasgos de 24 proyecciones (6 canales para la adquisición de cada rasgo) la reduce en una de 2 dimensiones. 2.7. Clasificadores empleados. Para la evaluación de los clasificadores a largo plazo se utilizaron los siguientes clasificadores Análisis Discriminante Lineal, Análisis Discriminante Cuadrático, K vecinos más cercanos, Análisis de Componentes Principales, Clasificador de Parzen y Redes Neuronales Artificiales. Luego de haber efectuado la extracción de los rasgos necesarios expuestos anteriormente para realizar el proceso de clasificación, se tomó como entrenamiento los tres primeros segundos de nuestra señal, y fueron entrenados los restantes 27 segundos de la señal, cada 3 segundos, con los valores obtenidos por cada uno de los 6 canales de los cuatro rasgos en las muestras citados anteriormente. 2.7.1. Análisis Discriminante Lineal. Un clasificador lineal logra usar las características de un objeto para identificar a qué clase pertenece tomando una decisión de clasificación basada en el valor de una combinación lineal de sus características. El principal parámetro a tener en cuenta en este clasificador es la probabilidad ‘a priori’ de las clases, que afecta la matriz de covarianza de las clases y la media de las clases. En.
Figure



+7





Documento similar
