Algoritmos desacoplados para la estimación del estado de sistemas eléctricos de potencia
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética. Título: “Algoritmos desacoplados para la estimación del estado de sistemas eléctricos de potencia.” Autor: Elvis L. Leiva Pérez de Alejo E-mail: [email protected]. Tutor: Dr. José Ángel González Quintero. E-mail: [email protected]. Santa Clara 2011 “Año 53 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “Nunca consideres el estudio como una obligación, sino como una oportunidad para penetrar en el bello y maravilloso mundo del saber". Albert Einstein (1879-1955); físico y matemático..
(5) ii. DEDICATORIA. Dedico este trabajo a mi familia que tanto han esperado este momento especial en mi carrera..
(6) iii. AGRADECIMIENTOS. A mis padres, mi hermano y mi novia por su constante preocupación y apoyo en todo momento, por ser incondicionales y brindarme toda su confianza y amor. A Pepe, sin él no hubiera sido posible alcanzar este peldaño tan anhelado en mi vida, por su paciencia y dedicación en esta investigación, gracias. A todos mis compañeros de aula y en especial a Reinier (el Zona) de automática. A todos mis amigos que siempre han estado presente en el momento y lugar necesario. A todos los profesores que a lo largo de los 5 años me brindaron su conocimiento y amistad..
(7) iv. TAREA TÉCNICA. 1-Realizar una revisión bibliográfica del estado del arte en lo referente a los estimadores de estado. 2-Plantear algoritmos desacoplados de estimación de estado. 3-Implementar algoritmos desacoplados de estimación de estado. 4-Validar algoritmos desacoplados de estimación de estado.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En este trabajo se plantea e implementan dos algoritmos desacoplados para la estimación de estado basados en la técnica de mínimos cuadrados ponderados. En tal sentido se hace una revisión bibliográfica de todo lo referente a Estimadores de Estado. Posteriormente los algoritmos son comparados entre sí y con el algoritmo formal para casos concretos. Se concluye que el algoritmo formal es el que más logra minimizar la función objetivo dado por la sumatoria ponderada de los errores entre las magnitudes medidas y las estimadas. Se comprueba además que, en este proceso, los algoritmos desacoplados necesitan mayor número de iteraciones para lograr la convergencia, pero lo hacen en un tiempo menor. Adicionalmente se realizan recomendaciones encaminadas a orientar los trabajos futuros hacia la incorporación de tratamiento de mediciones virtuales y erróneas en el proceso iterativo de los algoritmos implementados..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA................................................................................................................iv RESUMEN .............................................................................................................................v INTRODUCCIÓN ..................................................................................................................1 Organización del informe ...................................................................................................2 CAPÍTULO 1.. “Estudio del estado del arte”. ....................................................................3. 1.1. Estimador de estado. ................................................................................................3. 1.2. Desacoplado por el método (WLAV) de Estimación. .............................................4. 1.3. Errores más comunes. ..............................................................................................5. 1.4. Métodos más usados. ...............................................................................................7. 1.5. Sistema de Supervisión y Estimación del Estado ....................................................8. 1.6. Defensa previa contra mediciones erróneas en la Estimación del Estado. ..............9. 1.7. Estimador de Estado basado en la Lógica Difusa. .................................................10. 1.8. Detección de eyección de datos falsos en Estimadores de Estado en CD .............12. 1.9. Las medidas de potencia no colocadas en un sistema Estimador de Estado..........13. 1.10. Estimador de Estado usando el Método Newton-Raphson. ...............................15.
(10) vii 1.11. Estimación de la probabilidad máxima. .............................................................15. 1.12. Análisis de los algoritmos existentes para desarrollar un Estimador de Estado.16. CAPÍTULO 2.. “Algoritmos de Estimación del Estado”..................................................18. 2.1. Algoritmo Formal...................................................................................................18. 2.2. Algoritmo Desacoplado .........................................................................................20. 2.3. Algoritmo Desacoplado Rápido.............................................................................22. CAPÍTULO 3. 3.1. “Ejemplos de casos concretos”................................................................28. Ejemplo 1: Circuito de tres barras..........................................................................28. 3.1.1. Resultados del Algoritmo Formal...................................................................29. 3.1.2. Resultados del Algoritmo Desacoplado..........................................................31. 3.1.3. Resultados del Algoritmo Desacoplado Rápido. ............................................33. 3.1.4. Comparación entre los tres algoritmos. ..........................................................35. 3.2. Ejemplo 2: Circuito de tres barras con mediciones viertuales. ..............................36. 3.2.1. Resultados del Algoritmo Formal...................................................................38. 3.2.2. Resultados del Algoritmo Desacoplado..........................................................40. 3.2.3. Resultados del Algoritmo Desacoplado Rápido. ............................................41. 3.3. Ejemplo 3: IEEE de 14 Nodos. ..............................................................................44. 3.3.1. Resultados del Algoritmo Formal...................................................................46. 3.3.2. Resultados del Algoritmo Desacoplado..........................................................47. 3.3.3. Resultados del Algoritmo Desacoplado Rápido. ............................................48. 3.3.4. Tiempo de Cálculo..........................................................................................49. 3.3.5. Influencia de la presencia de mediciones erróneas.........................................49. 3.4. Conclusiones del capitulo ......................................................................................50. CONCLUSIONES Y RECOMENDACIONES ...................................................................51.
(11) viii Conclusiones.....................................................................................................................51 Recomendaciones .............................................................................................................51 REFERENCIAS BIBLIOGRÁFICAS .................................................................................52 ANEXOS ..............................................................................................................................54 Anexo I. Mediciones del ejemplo IEEE 14 ...................................................................54.
(12) Introducción. 1. INTRODUCCIÓN. El grado de seguridad con el que es necesario operar los sistemas eléctricos hoy en día hace imprescindible el empleo de un sistema de medición que actualice las principales variables monitoreadas segundo a segundo. Si estas mediciones, que presentan errores típicos de instrumentación no son filtradas adecuadamente, pueden dar lugar a la toma de decisiones erróneas por parte de los operadores. En tal sentido es que aparecen los sistemas SCADA acoplados a los programas de Estimación de Estado o simplemente los conocidos Estimadores de Estado. La función de los mismos es estimar los valores de voltaje en las barras que menores diferencias producen entre lo medido y lo estimado. Cuando las redes son extensas y el nivel de redundancia en las mediciones es elevado, los métodos tradicionales de estimación consumen tiempos que pueden llegar a ser prohibitivos. De ahí que implementar métodos que trabajen más aceleradamente es un aspecto de gran importancia en la temática de la estimación de estado. Dentro de las técnicas más empleadas están las que utilizan los beneficios del desacople entre las ecuaciones. Estas permiten ahorrar memoria y tiempo para lograr la solución al problema. Por estas razones este trabajo se propone como objetivo fundamental implementar métodos desacoplados para la estimación de estado sobre la base del algoritmo de mínimos cuadrados ponderados. Para ello se han trazado los siguientes objetivos específicos: 1. Realizar una revisión bibliográfica sobre la temática. 2. Plantear los algoritmos. 3. Implementar los algoritmos en lenguaje MATLAB. 4. Validar los resultados mediante ejemplos concretos..
(13) Introducción. 2. Los resultados obtenidos demuestran que los algoritmos desacoplados necesitan mayor número de iteraciones para lograr la convergencia, pero lo hacen en menos tiempo que el formal y consumiendo menores recursos de memoria. Sin embargo, el algoritmo formal es el que mejores resultados brinda en la función objetivo debido a que trabaja con mayor información. El informe se ha estructurado de la siguiente forma: Organización del informe -. Capítulo 1 “Estudio del estado del arte”: Se hace una revisión de la bibliografía disponible para realizar un estudio del estado del arte de los Estimadores de Estado. incidiendo. principalmente. en. los. algoritmos. Desacoplados,. Desacoplados- Rápidos. -. Capítulo 2 “Plantear e implementar Algoritmos de Estimación del Estado”: En este capítulo se explica el algoritmo de estimación de estado basado en la técnica de mínimos cuadrados ponderados mediante técnicas de desacople, se plantean. las. ecuaciones,. se. estudian. algunos. códigos. y. modelos. fundamentales que intervienen en el mismo. -. Capítulo 3 “Validar los Algoritmos de Estimación de Estado”: En este capítulo se explican los resultados obtenidos al correr ejemplos concretos que aparecen en la bibliografía. También se explican partes del código que se usa para implementar el algoritmo en lenguaje MATLAB. Se construyen tablas comparativas con los diferentes algoritmos..
(14) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 3. CAPÍTULO 1. “Estudio del estado del arte”.. Este capítulo recoge los principales aspectos del estado del arte relativo al tema de los analizadores de estado. Para ello fueron consultados tanto artículos científicos como libros que conforman la literatura clásica de esta temática. 1.1. Estimador de estado.. El Estimador de Estado es una herramienta de análisis matemático que actúa como un filtro para eliminar errores en los datos de magnitudes eléctricas enviadas a los Centros de Control. Los resultados producidos por los Estimadores de Estado (los voltajes (magnitudes y ángulos) y los flujos de potencia activa y reactiva) representan la entrada para los métodos de análisis de contingencias especiales, la optimización, los procedimientos de análisis en tiempo real para los mercados de electricidad y otras aplicaciones[1]. Juegan un papel importante en el funcionamiento en tiempo real de los sistemas de Potencia. Para su utilización se debe contar con la topología y los parámetros de la red, esta información unida a las mediciones son usadas para obtener la mejor estimación del Estado del Sistema. El Estado del Sistema es un grupo de variables (usualmente el voltaje en los nodos) que de ser conocidas permiten calcular cualquier otra magnitud del sistema. De manera que el Estado del Sistema básicamente determina el punto de operación del mismo. Las técnicas de estimación de estado han sido usadas y desarrolladas en los sistemas de transmisión por más de 2 décadas. Se basan en el método de los mínimos cuadrados ponderados y establecen una relación entre las mediciones realizadas y las variables de estado. El Estimador de Estado en Sistemas de Potencia comprende los siguientes componentes individuales[2]:.
(15) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 4. 1) Comprobación plausible de los datos medidos. 2) Análisis de observabilidad. 3) Estimador de Estado (Optimización no lineal) En una primera fase, se busca verificar y separar todas las medidas con algún error aparente con el objetivo de evitar cualquier distorsión pesada del estado de la red estimada debido a malas mediciones. Varios criterios de pruebas pueden ser usados(tal como verificar grandes mediciones para los flujos de las ramas abiertas al final, verificar la medición de la dirección del flujo de potencia a cada lado de los elementos de la rama, verificar para una razonable medición del nodo suma, etc.) En una segunda fase, la red es analizada en cuanto a su observabilidad. Aproximadamente hablando, una región de la red es llamada observable. Si las medidas en el sistema proporcionan suficiente información para estimar el estado de esa parte de la red. Un requisito necesario para un sistema observable es que el número de medidas disponibles sea igual o mayor que el número de variables estimadas. Pero también puede pasar que solo una de las partes de la red sea observable y algunas otras no lo sean aunque se cuente con un número suficiente de mediciones. Luego, no sólo es importante que existan bastantes mediciones, sino también que estas estén bien distribuidas en la red. Se dice que la red entera es observable si todos los estados pueden estimarse basado en los datos obtenidos. Si una red no es observable, sigue siendo útil para determinar las islas en la red que son observables. Finalmente, la Estimación de Estado por si misma evalúa el estado del sistema de potencia completamente. Matemáticamente hablando, el objetivo es minimizar la suma cuadrática ponderada de todas las desviaciones entre los flujos de ramas y los voltajes de barras calculados y medidos mientras se satisfacen todas las ecuaciones de flujo de carga. 1.2. Desacoplado por el método (WLAV) de Estimación.. Este método usa el flujo de la línea y la magnitud de las medidas de voltaje y es basado en la estrategia del desacoplado[3]. El desacoplado perfecto se obtiene convirtiendo las medidas de flujo de línea en el equivalente de las medidas.
(16) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 5. actuales y girándolos por el ángulo negativo de admitancia de la línea propia sin hacer ninguna suposición en las magnitudes de voltaje, ángulos y la relación r/x. Sin embargo, las mediciones de magnitud de voltaje son convertidas en mediciones de voltaje equivalentes en su forma rectangular. La variación asignada a cada medición proporciona una indicación de la certeza de esa medición en particular. La misma variante puede ser usada para mediciones de flujo de potencia reales y reactivas obtenidas en el final de una línea, es decir, para un par de mediciones de flujo de línea, desde la fiabilidad y exactitud de estos valores es el mismo en general. El componente perdido de las medidas de flujo de la línea dispareja y el componente malo de medidas de flujo de línea apareadas se reemplazan por las medidas pseudas. Las medidas pseudas son adquiridas del flujo de potencia o soluciones de SE anteriores, datos históricos o las suposiciones buenas del distribuidor. Las variaciones escogidas para las medidas pseudas es generalmente bastante grande para tener una más baja exactitud. Salvo estos cambios, los pasos algorítmicos del estimador de estado propuesto son similares a FDSE. El algoritmo del método propuesto se resume como sigue: 1. Lectura de las mediciones. 2. Formación de la matriz subjacobiana, Hr y Hi. 3. Calcular laƒ´Z r y ƒ´Z i. 4. Resolver los problemas de LP. 5. Chequeo de la convergencia, es decir, comprobar si todos los valores en ƒ´e y ƒ´f son suficientemente pequeños en magnitud. Si no convergió, actualizar el vector de estado.. 1.3. Errores más comunes.. Existen tipos de error[4] caracterizados por su difícil detección por parte de la técnica WLS, tal es el caso de los errores de tipo iterativo y conformativo. El análisis de este tipo de error se ha desarrollado mediante la teoría de puntos de apalancamiento en sistemas eléctricos. Datos con esta característica propician la eliminación de mediciones correctas. Lo anterior implica una pérdida de.
(17) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 6. información que afecta la calidad de los resultados estimados por la disminución en la redundancia de los datos, impidiendo en algunos casos la determinación del punto de operación del sistema, debido a que el problema de estimación se transforma en un problema de observabilidad. Dado lo anterior se modela el problema de estimación de estado cuando existen múltiples mediciones de difícil detección como un problema de optimización a través de la técnica de Simulated Annealing usando como factor de sensibilidad metodologías de detección de puntos de apalancamiento. Se usa como sistema de prueba el sistema IEEE de 57 nodos obteniendo resultados satisfactorios. La técnica clásica de estimación WLS en diversas implementaciones presenta resultados satisfactorios. Sin embargo, existen mediciones erradas de difícil detección como aquellas que poseen errores de. tipo. iterativo. y. conformativo,. conocidas. también. como. puntos. de. apalancamiento, en donde la metodología WLS presenta inconvenientes para su detección, debido a que durante la identificación de estas se elimina innecesariamente datos que no contienen errores, disminuyendo el nivel de redundancia, ocasionando en algunos casos problemas de observabilidad, produciendo inconvenientes en la determinación del estado del sistema. En estimación de estado, un punto de apalancamiento se define como una medición con alto grado de error, caracterizado por su difícil detección por parte de la metodología clásica WLS y su influencia negativa sobre las mediciones sin presencia de error ubicadas en regiones cercanas. Por consiguiente, los puntos de apalancamiento evitan la correcta identificación de las mediciones erróneas, debido a que sus residuos normalizados son pequeños, propiciando de esta manera la eliminación de medidas correctas. Dentro de la teoría de puntos de apalancamiento aplicada al análisis de mediciones en sistemas eléctricos, se han desarrollado metodologías que permiten conocer las medidas dentro de un sistema de potencia, que en caso de presentar errores considerables, la técnica WLS tendría inconvenientes en su detección..
(18) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 1.4. 7. Métodos más usados.. A través de la literatura consultada podemos constatar que existe un gran número de métodos para el cálculo de flujos de potencia. Pero están todos enmarcados en tres algoritmos generales: 1-Métodos de Ybus. 2-Métodos de Zbus. 3-Métodos de Newton. Según [5] entre los métodos de Ybus vistos podemos encontrar los siguientes: Relajación, Gauss, Gauss-Seidel, Glimn y Stagg, Zero Mismatch, Ward y Hale, Ajuste secundario. Los métodos de Ybus pueden ser agrupados sobre el algoritmo de Gauss y de Gauss-Seidel fundamentalmente. Todos estos métodos tienen como características fundamentales que al utilizar la matriz de admitancias aprovechan su simetría y su gran número de elementos ceros. Esto provoca grandes ahorros en espacio computacional. También tienen la característica que el tiempo de ejecución por iteración es muy bajo y directamente proporcional al número de nodos n. Como el número de iteraciones es proporcional al tamaño del sistema, para un sistema grande de orden n, el tiempo total de cálculo será aproximadamente n2. Esto provoca que estos métodos sean menos competitivos que otros existentes. Los métodos de Zbus más empleados son: Algoritmo de la matriz Z, Método iterativo de Gauss usando Zbus, Método iterativo de Gauss-Seidel usando Zbus, Método híbrido de Newton y matriz Zbus. La característica fundamental de estos métodos radica en su buena convergencia incluso ante problemas mal condicionados, pero presenta la deficiencia de requerir alta capacidad de almacenamiento. También presenta dificultades de convergencia cuando el SEP tiene muchos nodos PV y cuando las potencias especificadas en los nodos son muy grandes. El tiempo de cálculo por iteración es mayor que los restantes métodos..
(19) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 8. Los métodos de Newton que se muestran en la literatura son: Newton-Raphson formal, Newton-Raphson desacoplado y Newton-Raphson desacoplado rápido. Estos métodos tienen muy buena convergencia aunque fallan ante problemas mal condicionados. Aprovechan las técnicas de ordenamiento y factorización de matrices esparzas lo que le permite aumentar la velocidad de cálculo y ahorrar los recursos de almacenamiento comparado con los restantes métodos. 1.5. Sistema de Supervisión y Estimación del Estado. El Sistema supervisión es necesario para asegurar el funcionamiento fiable de redes de potencia. Proporciona la información necesaria sobre la condición de una red de poder basada en las lecturas de metros colocados a los componentes más importantes, como las subestaciones[6]. Dichas mediciones pueden incluir los voltajes de barras, inyecciones de potencia activa y reactiva, y los flujos de potencia reactiva por las ramas en cada subsistema de una red de potencia. Estas medidas se transmiten típicamente a un centro de mando dónde el personal, con la ayuda de computadoras, colecciona los datos cruciales del sistema y proporciona una supervisión centralizada y controla la capacidad de la red de potencia. Normalmente se guardan las mediciones en un sistema de telemetría que también conocido como (SCADA). La estimación de estado es usada en sistemas de monitoreo para una mejor estimación del estado del sistema de potencia a través del análisis de las medidas recogidas y los modelos de la red. La estimación de estado es el proceso de estimar variables de estado desconocidas en una red basada en las mediciones de los metrocontadores. El personal del centro de mando utiliza el rendimiento del estimador de estado cuando realizan análisis de contingencia en que razonan los problemas operacionales, las acciones que pueden tomar para evitar esos problemas, y los efectos colaterales de esas acciones. Por ejemplo, ellos pueden escoger aumentar el rendimiento de un generador de potencia para mantener el funcionamiento fiable incluso en la presencia de faltas (por ejemplo, una avería del generador)..
(20) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 9. La estimación de estado usa modelos de flujo de potencia. Un modelo de flujo de potencia es un sistema de ecuaciones que pinte el flujo de energía en cada línea de transmisión de una red de potencia. Un modelo de flujo de potencia de CA es un modelo en el cual se consideran las potencias activas y reactivas y se formula por ecuaciones no lineales. Este modelo puede ser computacionalmente caro y no siempre converge a una solución. Así, ingenieros de sistemas de potencias a veces usan un modelo de CD linealizado para aproximarse al modelo de CA. 1.6. Defensa previa contra mediciones erróneas en la Estimación del Estado.. Es concebible que un atacante puede intentar introducir las medidas malévolas para lograr sus metas. Si estas medidas erróneas afectan el resultado de la estimación de estado, el resultado de la desinformación puede reducir a los operadores el nivel de conocimiento de la situación mientras ayuda así el alcance del atacante a sus metas malévolas. Investigadores de los sistemas de potencia han comprendido la amenaza de dichas medidas erróneas y han desarrollado técnicas paraprocesarlos (por ejemplo, [Monticelli 1999; El Mili et al. 1985; Monticelli yGarcía 1983; El Monticelli et al. 1986; El Mili et al. 1984; Lin y Cacerola 2007]). Estas técnicas primero descubren si hay medidas erróneas, y entonces las identifica y elimina, si existen. Algunas de estas técnicas (por ejemplo, [Monticelli 1999; El Monticelli et al. 1986; Mili el al del et. 1984]) eran designadas arbitrariamente, interactuando (es decir, puso en correlación) las medidas erróneas. A primera vista, parece que estos acercamientos también pueden eliminar las medidas malévolas inyectadas por los atacantes, debido a que tales mediciones malintencionadas pueden ser consideradas como mediciones erróneas interactuantes. Según[6]a través de la defensa previa se identifica una vulnerabilidad previamente desconocida en las técnicas actuales apuntando a descubrir e identificar las medidas erróneas para la estimación de estado en las redes de potencia. Investigamos las implicaciones de esta vulnerabilidad a través de presentar y analizar una nueva clase de ataques, los datos falsos llamados ataques de inyección, contra la estimación de estado en los sistemas eléctricos de potencia..
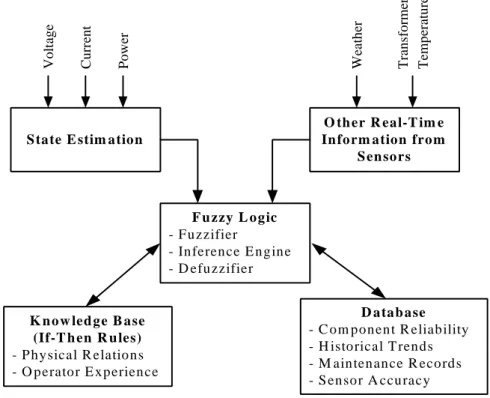
(21) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 10. Bajo la suposición de que el atacante puede acceder a la potencia actual del sistema de configuración de la información y manipular las medidas de metros en lugares físicamente protegidos, dicho ataque puede introducir errores arbitrarios en ciertas variables de estado a menos que fueran descubiertas por técnicas existentes. Se consideran dos escenarios de ataques dónde el atacante o se reprime a algunos metros específicos, o se limita a los recursos de los metros. El atacante puede sistemática y eficazmente construir los vectores del ataque en ambos escenarios que no sólo pueden cambiar los resultados de la estimación de estado sino también pueden modificar los resultados de cierta forma. También se extienden los datos falsos de ataques de inyección para generalizar los mismos, y se usan ambos análisis teóricos y se demuestra que un atacante puede ganar más impacto que los datos falsos de ataques de inyección lanzando los datos falsos generalizados de los ataques de inyección. A pesar de la capacidad teórica de estos ataques, señalamos que tales ataques están estrictamente limitados por las restricciones del mundo real, y no son amenazas inminentes a nuestras redes de potencia. 1.7. Estimador de Estado basado en la Lógica Difusa.. El HFCS se utiliza para combinar la información de múltiples dominios con el objetivo de detectar, aislar, identificar, y mitigar las amenazas de las redes de potencia[7].El HFCS incluye un componente que observa si el sistema esta operando normalmente. Otra parte del HFCS contiene una base de datos de información que incluye la fiabilidad del componente, exactitud del sensor y el archivo de mantenimiento (vea Figura 1.1). Conociendo el sistema, la próxima parte es integrar la lógica difusa con un estimador de estado simple. El propio sistema difuso consiste en una base de conocimiento, artefacto de inferencia y difusor. El difusor es responsable de trazar las entradas crespas de los sensores en las variables rizadas usadas por el HFCS. La base de conocimiento en un sistema rizado es típicamente un juego de reglas; sin embargo, la base de conocimiento en esta investigación debe incorporar la información adicional (de la naturaleza híbrida) con las relaciones físicas y experiencia del operador. El.
(22) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 11. artefacto de la inferencia es el proceso del razonamiento por el cual la entrada del sensor difuso activa las reglas pertinentes. Las consecuencias de las reglas. Transformer Temperature. Weather. Power. Current. Voltage. activadas son convertidas en valores crespos que usa el difusor.. O ther R eal-T im e Inform ation from Sensors. State E stim ation. F uzzy L ogic - Fuzzifier - Inference E ngine - D efuzzifier. K now ledge B ase (If-T hen R ules) - Physical R elations - O perator E xperience. -. D atabase C om ponent R eliability H istorical T rends M aintenance R ecords Sensor A ccuracy. Figura 1.1 Esquema del HFCS. El sistema clasificador híbrido difuso (HFCS = HybridFuzzyClassifierSystem) tiene el potencial para aumentar la robustez de detectar, identificar y caracterizar las inconsistencias en los datos de los sensores del sistema de potencia. El HFCS asimila la información de los dominios múltiples para descubrir, aislar, identificar y mitigar las amenazas a las redes de potencia. El acercamiento lógico difuso tiene una ventaja por encima de los métodos con los límites de decisión estrictos. Los umbrales de detección de los sensores de falla fueron desarrollados utilizando un acercamiento de lógica difusa basado en reglas. Las metas son relajar los límites rígidos inherentes típicamente requeridos en las técnicas de decisión estadísticas y permitir la combinación de información de diagnóstico de dominios de múltiples sensores. La inclusión de información, como archivos de mantenimiento, incluso técnico, reparación o calibración de datos, y el fabricante, podría emplearse para.
(23) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 12. realizar análisis extensos, incluso el descubrimiento de fallas. El HFCS está bajo desarrollo continuo. 1.8. Detección de inyección de datos falsos en Estimadores de Estado en CD. La red de potencia es un sistema complejo de redes interconectadas cada uno de los cuales consisten en generadores eléctricos de potencia y consumidores de dicha potencia (las cargas) conectadas por líneas de transmisión y distribución. Para asegurar el funcionamiento fiable de la red de potencia[8], cada uno de las redes interconectadas es continuamente supervisada y controlada por un centro del mando usando un sistema de mando industrial conocido como el Mando De supervisión y Adquisición de datos (SCADA) del sistema. El sistema de SCADA colecciona las medidas de los sensores en la red, de 2 a 4 segundos. Éstos sensores se alimentan de las medidas del un Estimador de Estado que, como el nombre indica, estima el estado de la red de potencia basado en las medidas obtenidas por el sensor. Operadores locales de la red usan esta estimación del estado actual para tomar control de acciones correctivas si es necesario y para planear para cualquier contingencia (por ejemplo, pérdida de una línea de la transmisión o generador). Así la estimación de estado juega un papel importante en el funcionamiento fiable de la red de potencia. La red de potencia, teniendo una infraestructura crítica, es un atractivo para el blanco del ataque. Los adversarios pueden intentar manipular las medidas del sensor, insertando órdenes de mando falsos, retrasos, mediciones, y acude a otras acciones malévolas. Por consiguiente, es crucial proteger el poder de las aplicaciones del sistema contra tal actividad para asegurar el funcionamiento seguro y fiable de la red de potencia. Recientemente se llevó a cabo una investigación que demostró que un adversario, armado con el conocimiento de las configuraciones de la red, puede inyectar datos falsos en el estimador de estado usando modelos de flujos de CD sin ser descubiertos. El trabajo hecho por[9] presentó los datos falsos de ataques de inyección desde el punto de vista de un adversario y mostró lo que toma el adversario para lanzar un ataque exitoso, nosotros miramos el problema del punto de vista del operador de red de potencia y preguntamos que se utiliza para defenderse contra dichas.
(24) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 13. agresiones. Intuitivamente existen dos acercamientos para proteger el control de aplicaciones como la estimación de estado. El primero es diseñar algoritmos de control robustos que pueden descubrir o tolerar la modificación de datos malévolos. El segundo es proteger las mediciones del sensor y otros datos que sean manipulados. Estos dos acercamientos no son necesariamente mutuamente exclusivos pero pueden complementarse uno al otro. 1.9. Las medidas de potencia no colocadas en un sistema Estimador de Estado.. A veces las medidas del sistema de potencia poseen un grado de error, debido a instrumentos instalados con las polaridades invertidas esto provoca la pérdida de información a través de la conversión de analógica a digital[10]. Los métodos de estimación de estado pueden marcar y aplanar las mediciones erróneas, pero la estimación de estado tiene una mejor exactitud global cuando existe menos error. En un mercado desregulado de potencia es cada vez más importante encontrar a toda costa las maneras eficaces para mejorar la visibilidad del sistema y responder a los errores de las mediciones. Si el error es debido a un instrumento incorrectamente instalado, entonces una solución del software ahorraría más dinero probablemente que la reinstalación del instrumento. Un error tal en las mediciones de potencias son medidas complejas de potencia no colocadas. La potencia compleja es normalmente calculada del voltaje y las medidas actuales que deben tomarse en el mismo lugar para tener significado. En el caso no colocado el transformador de corriente (CT) y el transformador potencial (PT) de un instrumento de medida de potencia está separado por una cantidad de impedancia. Una medida exacta de potencia puede ser calculada utilizando un valor no colocado más una corrección de procedimiento. Este cálculo de la corrección requiere un conocimiento exacto de la impedancia entre los instrumentos, la localización de instrumentos relativa a la impedancia y acceso a una lectura de PT. Dado estos valores, una medida de potencia no colocada puede corregirse a través del cálculo en lugar de una costosa e interruptiva reinstalación del hardware..
(25) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 14. El Algoritmo Basado en la Tolerancia de la Falta (ABFT) es una técnica con un costo eficaz para descubrir y corregir los errores causados por los fracasos permanentes o transitorios en el hardware. ABFT es basado en codificar los datos a nivel de sistema corrigiendo errores en el formulario o error en el código detector y luego los algoritmos designados para operar en los datos de la entrada puestos en código para producir datos de salida codificados. Una de las ventajas importantes del ABFT según[11] que lo hace muy atractivo es que no requiere ninguna modificación del hardware para proporcionar la falta de tolerancia. Esta técnica ya se ha aplicado a los algoritmos numéricos por ejemplo las multiplicaciones de la matriz, factorización LU , la transformada rápida de Fourier , factorización QR, la descomposición de valor singular, ecuación de Laplace , corriendo en los procesadores de la serie. Luego el mismo juego de problemas fue resuelto usando algoritmos paralelos corridos en los multiprocesadores de uso general. La técnica de ABFT es conocido como ABED (el algoritmo basado en la detección del error) cuando sólo se aplica al descubrimiento de errores. La técnica ABED proporciona la tolerancia de la falta conservando una invariante antes de la salida y al final de todos los cómputos en un algoritmo. También puede conservar una invariante durante los cómputos modificando el algoritmo ligeramente. Falta de preservación de la invariante durante el curso del algoritmo señala presencia de errores en el cómputo debido a las faltas. Desde que la mayoría de estos cómputos se realiza en computadoras que tienen la precisión finita, a veces las invariantes no son preservadas debido a los errores del redondeo en el cómputo de la invariante y en el algoritmo, la técnica de ABFT puede señalar presencia de faltas incluso en ausencia de cualquier falta actual del hardware. Esta situación es conocida como falsas alarmas. Los cómputos de Invariante, por consiguiente deben corregirse para los errores de redondeo, eliminar o minimizar falsas alarmas usando algún tipo de tolerancia. Se ha mostrado que métodos con tolerancia usando análisis del error con manipulaciones algebraicas en el algoritmo es superior a otros métodos. El análisis del error proporciona límites superiores de errores de redondeo que.
(26) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 15. pueden ocurrir en el cálculo de una expresión en una máquina con precisión finita. Las invariantes fueron modificadas agregando el valor computado del error del redondeo acumulado en un algoritmo que totalmente resuelve el problema de falsas alarmas para cualquier conjunto de datos de cualquier magnitud o dimensión. 1.10 Estimador de Estado usando el Método Newton-Raphson. El Estimador Estado Desacoplado Rápido (FDSE), es basado en suposiciones que en la práctica la red del sistema de potencia bajo estado estable, los flujos de potencia activa son menos sensibles a la magnitud del voltaje y muy sensibles al ángulo de fase del voltaje, mientras los flujos de potencia reactivos son menos sensibles a los ángulos de fase del voltaje y son muy sensibles a las magnitudes del mismo. Usando estas propiedades, las submatrices HP, V, Hpij,V, Hpji, V, HQ, Hqij, y Hqji, son despreciadas. Debido a las aproximaciones hechas, las correcciones en los voltajes calculados en cada iteración son menos exactas. Esto produce la característica de la convergencia pobre. El método Estimador de Estado Newton-Raphson (NRSE) fue introducido como consecuencia de ser el más popular debido a la formulación exacta del problema y a una muy buena característica de la convergencia. En el método de NRSE, los elementos de la matriz Jacobiana se calculan de las expresiones normales, que son funciones de los voltajes de barra, potencias de barra y los elementos de matriz admitancia de barra. Hoy día, con el advenimiento de computadoras rápidas, la gran cantidad de cálculos complejos puede llevarse a cabo muy eficazmente incluso en un tiempo menor. Por lo que no existe ninguna necesidad de utilizar modelos aproximados. 1.11 Estimación de la probabilidad máxima. El objetivo de la estimación de estado es determinar el estado más probable del sistema sobre la base de las cantidades que son medidas. Una manera de lograr esto es mediante la estimación de la probabilidad máxima (MLE = Maximum Likelihood Estimation), un método ampliamente usado. Se asume que los errores.
(27) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 16. de medición tienen una distribución de probabilidad conocida con parámetros desconocidos. La función de densidad de probabilidad conjunta para todas las mediciones puede ser escrita en función de estos parámetros desconocidos. Esta función es referida como la función de probabilidad y alcanzará su valor máximo cuando los parámetros desconocidos sean elegidos de manera que estén más cerca de sus valores verdaderos. Por lo tanto, se puede plantear un problema de optimización para maximizar la función de probabilidad como una función de estos parámetros desconocidos. La solución brindará el estimado de máxima probabilidad para los parámetros de interés. Comúnmente se asume que los errores de medición tienen una distribución Gaussiana (normal) y los parámetros para tal distribución son su media y su variancia. El problema de la estimación de la probabilidad máxima se soluciona entonces para estos dos parámetros, la función de densidad de probabilidad Gaussiana, y la función de distribución de probabilidad correspondiente serán examinados brevemente antes de describir el método de estimación de la probabilidad máxima. 1.12 Análisis de los algoritmos existentes para desarrollar un Estimador de Estado. Para seleccionar el algoritmo a usar en este trabajo se realizó un estudio de las características de los métodos comúnmente usados. El análisis se realizó valorando de cada método sus ventajas y desventajas, a continuación mostramos la selección[5]: . El método Gauss-Seidel (G-S) tiene muy baja velocidad de convergencia y requiere un aumento del número de iteraciones con el incremento del tamaño del SEP.. . El método de la Zbus la capacidad de almacenamiento se ve afectada por el número de nodos al cuadrado lo que para SEPs grandes requiere mucha capacidad de almacenamiento, además la formación de la matriz Z lleva mucho esfuerzo computacional.. . El método N-R Formal (NRF) maneja una gran cantidad de información lo que aumenta los requerimientos de almacenamiento considerablemente, además.
(28) CAPÍTULO 1 “ Estudio del Estado del Arte”.. 17. necesita recalcular la matriz jacobiana en cada iteración demandando gran esfuerzo computacional y haciendo muy lento los cálculos de cada iteración. . El método N-R Desacoplado (NRD) necesita recalcular las matrices [A] y [C] en cada iteración lo que hace que consuma un esfuerzo computacional apreciable. Además se ve afectada su seguridad de convergencia por redes de alta relación R/X.. . El método N-R Desacoplado Rápido (NRDR) cumple con casi todos los requisitos pero se ve grandemente afectada su convergencia por redes de alta R/X..
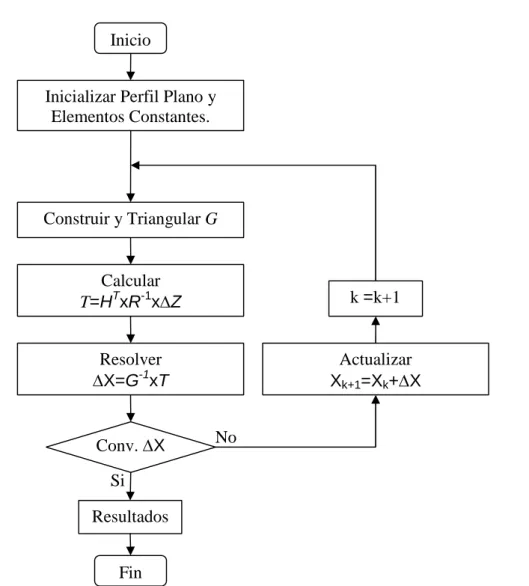
(29) CAPÍTULO 2. Algoritmos de Estimación del Estado. 18. CAPÍTULO 2. “Algoritmos de Estimación del Estado”.. En este capítulo se analizan las ventajas y desventajas de los algoritmos formal, desacoplado y desacoplado rápido para la solución de las ecuaciones de estimación de estado por el método de los mínimos cuadrados ponderados. 2.1. Algoritmo Formal.. Este tema fue tratado ampliamente en la referencia[12]. El diagrama de bloques del algoritmo formal del método de mínimos cuadrados ponderados se muestra en la figura2.1. . Principales características Este método ha sido ampliamente usado en todo el mundo por su. característica. de. convergencia. y velocidad. de. cálculo.. Sus. principales. características son: Ventajas: 1-Razón de convergencia cuadrática [1]. 2-El tiempo de cálculo crece linealmente con el tamaño del sistema [15]. 3-Puede resolver sistemas fuertemente cargados incluso con desfasajes superior a los 90º [1]. 4- La solución no es perturbada por sistemas mal condicionados ni es crítica la localización del nodo de balance..
(30) CAPÍTULO 2. Algoritmos de Estimación del Estado. 19. Inicio Inicializar Perfil Plano y Elementos Constantes.. Construir y Triangular G. Calcular T=HTxR-1xZ. k =k+1. Resolver X=G-1xT. Actualizar Xk+1=Xk+X. Conv. X. No. Si Resultados . Fin Figura 2.1 Diagrama de bloques del algoritmo WLS formal. Desventajas: 1-La convergencia se ve afectada por los estimados iniciales de las variables [15]. 2-Maneja una gran cantidad de información lo que le aumenta los requerimientos de almacenamiento. 3-Se necesita recalcular la jacobiana en cada iteración. 4-La rugosidad de la función en la región de interés puede demorar la convergencia, fallar totalmente o conducir a una solución no útil [1]..
(31) CAPÍTULO 2. Algoritmos de Estimación del Estado. 2.2. 20. Algoritmo Desacoplado. La principal carga calculada asociada al algoritmo de solución WLS para la estimación de estado es el cálculo y la descomposición triangular de la matriz ganancia. Una forma de reducir esta carga es reducir la matriz ganancia para considerar solamente los elementos que más influyen en la solución del problema. Esta aproximación está en línea con la observación práctica de que los elementos de la matriz ganancia no cambian significativamente entre la inicialización y la solución convergente. Además, como ya se ha planteado y analizado en la literatura para el problema de flujo de potencia, la sensibilidad de las ecuaciones de potencia real a los cambios en la magnitud de los voltajes de barra es muy bajo, sobre todo para los sistemas de transmisión de alto voltaje[13]. Lo mismo ocurre para las ecuaciones de potencia reactiva con respecto a los ángulos de fase de los voltajes. Los pasos del algoritmo desacoplado por el método de mínimos cuadrados ponderados se enumeran a continuación: 1- Inicializar todos los voltajes de barra como una arrancada plana, es decir Vi= 1 p.u, i= 0 para todo i= 1 hasta N. 2- Construir todas las matrices y vectores constantes. 3- Construir y realizar la descomposición triangular de GAA. 4- Calcular TA. 5- Resolver GAA x =TA 6- Si no hay convergencia en , actualizar (k+1) = (k) + . 7- Construir y realizar la descomposición triangular de GRR. 8- Calcular TR. 9- Resolver GRR x V=TR 10-Si no hay convergencia en V, actualizar V(k+1) = V(k) + V..
(32) CAPÍTULO 2. Algoritmos de Estimación del Estado. 21. 11-Chequear si y V son menores que la tolerancia de convergencia. Si no ir a Paso 3. 12-Resultados. El diagrama de bloques correspondiente se muestra en la figura siguiente: Inicio Inicializar Perfil Plano y Elementos Constantes.. Construir y Triangular GAA.. Construir y Triangular GRR.. Calcular TA=HAATxRA-1xZ'A. Calcular TR=HRRTxRR-1xZ'R. Resolver =GAA-1xTA. Resolver V=GRR-1xTR. k =k+1 No. Conv. . Si. No Actualizar k+1=k+. Conv. . Si. Conv. . No Actualizar Vk+1=Vk+V. Si Resultados . Fin. Figura 2.2 Diagrama de bloques del algoritmo WLS desacoplado. . Principales características Este método ha sido usado en todo el mundo por su característica de. convergencia y velocidad de cálculo. Sus principales características son:.
(33) CAPÍTULO 2. Algoritmos de Estimación del Estado. 22. Ventajas: 1- Es simple y eficiente computacionalmente. 2- Razón de convergencia lineal. Confiable en convergencia al igual que el formal. Rápida convergencia inicial. 3- En capacidad de almacenamiento aventaja al formal. Ahorra de un 30 a un 40% respecto al formal[5, 13]. 4- El tiempo de cálculo por iteración es menor que el formal de un 10 a un 20%[5, 13]. Desventajas: 1. Requiere mayor número de iteraciones que el formal[5, 13]. 2. Se necesita recalcular las matrices GAA y GRR en cada iteración lo que hace que consuma esfuerzo computacional [5, 13]. 3. La irregularidad de la función en la región de interés puede demorar la convergencia, fallar totalmente o conducir a una solución no útil [5, 13]. 4. Se ve afectada la convergencia por redes de alta relación R/X. 2.3. Algoritmo Desacoplado Rápido. Retomando el hecho de que en la práctica los elementos de la matriz ganancia no cambian significativamente entre la inicialización y la solución convergente, se puede idear una forma de reducir todavía más el esfuerzo de cálculo. La misma consiste en emplear una matriz aproximada pero constante. Esta observación lleva a la formulación del algoritmo desacoplado rápido para el problema de la estimación de estado. En esta formulación, las ecuaciones se dividen en dos partes: . Las mediciones de potencia reales, incluso las inyecciones de potencia real a las barras y los flujos de potencia real en las ramas. Serán denotados por la letra A, significando las medidas activas..
(34) CAPÍTULO 2. Algoritmos de Estimación del Estado. . 23. Las mediciones de potencia reactiva, incluso las inyecciones de potencia reactiva, flujos de potencia reactiva en las ramas y magnitud de las medidas de voltajes de barra. Serán denotadas por la letra R, significando las medidas reactivas.. Note que las medidas de magnitud actuales de la rama no son incluidas en ninguno de los grupos de mediciones. Esto es intencional debido al hecho de que tales medidas no se prestan tan prontamente como la formulación del desacoplado. Esta es una de las limitaciones de la formulación del desacoplado y los problemas asociados con el uso de medidas de magnitud actuales serán discutidos posteriormente. Así, las mediciones y sus arreglos relativos pueden dividirse basado en la designación anterior:. Las siguientes suposiciones se usan para obtener el algoritmo desacoplado rápido de estimación de estado: 1- Asume la inicialización en condiciones aplanadas, es decir todos los voltajes de barra tienen como magnitud nominal 1.0 p.u y en fase entre sí. 2- Ignora la diagonal secundaria del bloque HRR y HRA en la medida jacobiana H, y calcula la matriz ganancia usando esta aproximación. Esto también eliminará la diagonal no principal de la matriz ganancia, rindiendo una constante y desacopla la matriz ganancia evaluada en salida llana:.
(35) CAPÍTULO 2. Algoritmos de Estimación del Estado. 24. 3- Repita la misma aproximación para las entradas jacobianas cuando se calcula la parte derecha del vector:. Hay dos variaciones a las suposiciones básicas mencionadas anteriormente. Ésta variación pertenece esencialmente a las submatrices HAA y HRR. Ignorando las resistencias serie de la rama formando HAA o HRR que conducirán a la formulación llamada. XB. o. BX. del. desacoplado. rápido. de. estimación. de. estado. respectivamente. Las suposiciones anteriores llevan a un algoritmo de solución desacoplado que usa las coordenadas polares en sus cálculos. Luego, la solución para el ángulo de fase∆. y magnitud∆V las actualizaciones se obtienen alternativamente y la. convergencia se prueba basada en el máximo cambio en ambas series. Los pasos del algoritmo de la solución se dan a continuación: 1. Inicialice todos los voltajes de barra aplanados, Vi = 1 p.u, i. = 0 para. todo i = 1,…, N. 2. Construya y realice la descomposición triangular de GAA y GRR. 3. Calcule TA. 4. Resuelva GAA ∆ =TA. 5. Chequee si ∆ and ∆V son menores que la tolerancia de convergencia. 6. Actualice k+1 = k + ∆ . 7. Calcule TR. 8. Resuelva GRR∆V = TR..
(36) CAPÍTULO 2. Algoritmos de Estimación del Estado. 25. 9. Chequee si ∆ and ∆V son menores que la tolerancia de convergencia. Si lo son parar. Si no, continuar. 10. Actualice Vk+1 = Vk + ∆V. 11. Ir al paso 3. Nótese que las submatrices de ganancia GAA y GRR se calculan mediante la descomposición dentro de sus factores triangulares sólo una vez, comenzando la solución iterativa. Las soluciones para∆. y ∆V son obtenidas eficientemente. usando la inversión tradicional para matrices dispersas (triangulación por sustitución hacia adelante y hacia atrás), ya que los factores triangulares no necesitan ser actualizados durante las iteraciones. Además, la dimensión de las dos submatrices de ganancia en conjunto constituye la mitad del tamaño de la matriz de ganancia totalmente acoplada, lo cual se reduce el esfuerzo computacional. Principales características El algoritmo de estimación de estado desacoplado rápido ha tenido una amplia aceptación en la industria y varias versiones han sido implementadas en centros de control del mundo entero. Su diagrama de bloques se muestra en la figura siguiente..
(37) CAPÍTULO 2. Algoritmos de Estimación del Estado. 26. Inicio Inicializar Perfil Plano y Elementos Constantes. Construir y Triangular GAA. Construir y Triangular GRR.. Calcular TA=HAATxRA-1xZ'A. Calcular TA=HAATxRA-1xZ'A. Resolver =GAA-1xTA. Resolver V=GRR-1xTR. k =k+1 No. Conv. . Si. No Actualizar k+1=k+. Conv. . Si. Conv. . No Actualizar Vk+1=Vk+V. Si Resultados . Fin. Figura 2.3 Diagrama de bloques del algoritmo WLS desacoplado rápido. Cuando es comparada con el algoritmo WLS Formal y el desacoplado, la versión desacoplada-rápida tiene las siguientes características: Ventajas: 1. Es simple y eficiente computacionalmente. 2. Requiere menos memoria. 3. Es computacionalmente más rápido, debido a que las submatrices son más pequeñas y constantes, requiriendo que la descomposición triangular se lleve a cabo solamente en la primera iteración..
(38) CAPÍTULO 2. Algoritmos de Estimación del Estado. 27. 4. El hecho de tener las matrices constantes provoca que el método no se vea afectado por la rugosidad de la función en la vecindad de la región interés. 5. El espacio de almacenamiento requerido es el 60% del Formal [1]. 6. Si los ZA/V y los ZR/V son calculados eficientemente el tiempo de cálculo por iteración es 5 veces más rápido que el Formal y aproximadamente de 2-3 más rápido que el Desacoplado. Por otro lado, tiene limitaciones con las cuales hay que ser muy cuidadoso. Desventajas: 1- Requiere mayor número de iteraciones que el formal y el desacoplado. 2- Puede haber casos cuando los parámetros de la red o las condiciones en que opera violan las suposiciones del desacoplado. En tales casos no pueden converger o pueden converger para soluciones inexactas. Sin embargo tales casos son bastante raros en la práctica. 3- La magnitud de las medidas de corriente por la rama (Ampere) no tienen el mismo tipo de propiedades de desacoplado como el resto de las mediciones. Por tanto, la formulación desacoplada no puede ser fiablemente empleada en la presencia de las medicines de magnitud de corriente de rama..
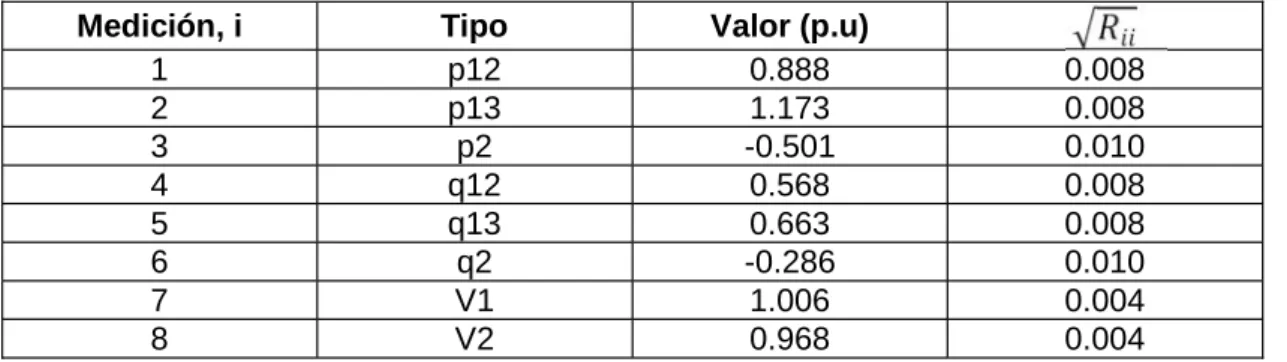
(39) CAPÍTULO 3. “Ejemplos de casos concretos”. 28. CAPÍTULO 3. “Ejemplos de casos concretos”. En este capítulo se presentan ejemplos de casos tomados de la literatura, se reflejan los resultados obtenidos por la implementación de los tres algoritmos utilizados y se comparan para ver la eficiencia de los mismos. 3.1. Ejemplo 1: Circuito de tres barras.. El siguiente circuito aparece en el ejemplo 2.2 de la página 19 de la referencia[14]. El mismo consiste en una red de 3 barras enlazadas mediante líneas simples con los siguientes datos: Tabla 3.1 Datos de línea de ejemplo 1. Línea Desde. Hasta. Resistencia R(p.u). 1 1 2. 2 3 3. 0.01 0.02 0.03. Reactancia X(p.u) 0.03 0.05 0.08. Susceptancia Total 2bs(p.u) 0.0 0.0 0.0. Sobre esta red se realizaron las siguientes mediciones: Tabla 3.2 Datos de las mediciones del ejemplo 1. Medición, i 1 2 3 4 5 6 7 8. Tipo p12 p13 p2 q12 q13 q2 V1 V2. Valor (p.u) 0.888 1.173 -0.501 0.568 0.663 -0.286 1.006 0.968. 0.008 0.008 0.010 0.008 0.008 0.010 0.004 0.004.
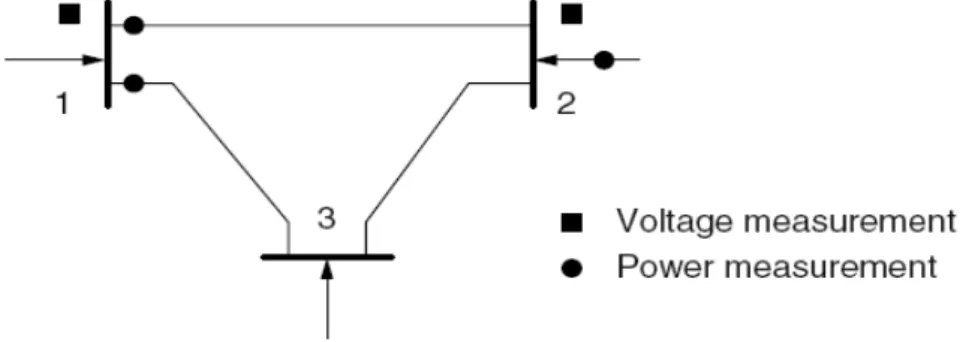
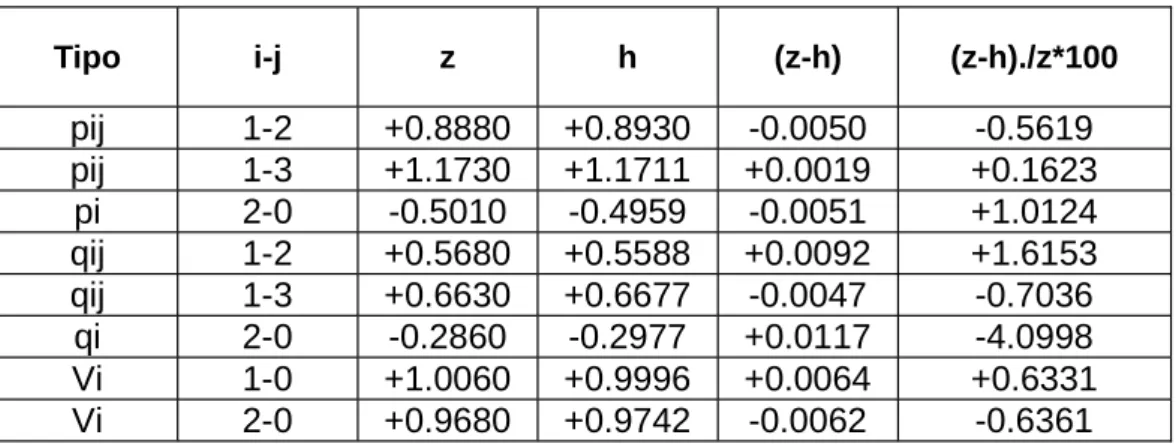
(40) CAPÍTULO 3. “Ejemplos de casos concretos”. 29. El diagrama monolineal del circuito se muestra en la figura 3.1.. Figura 3.1Monolineal y configuración de mediciones del ejemplo 1. Con los datos de este ejemplo se corrieron los tres algoritmos: el algoritmo Formal, el Desacoplado y el Desacoplado-Rápido. Los resultados obtenidos se muestran a continuación. 3.1.1 Resultados del Algoritmo Formal. Este algoritmo converge en tres iteraciones, para una tolerancia de 1x10-4. El valor final de la función objetivo es J =8.6383. Los valores estimados finales del algoritmo se muestran a continuación: Tabla 3.3 Voltajes estimados por el algoritmo formal. Barra, i 1 2 3. V(p.u) 0.99963 0.97416 0.94389. A(Grados) 0 -1.2475 -2.7457. Los resultados de las mediciones calculadas a partir de los valores estimados de la última iteración se muestran en la tabla 3.4. Es importante notar que en la tabla anterior “z” representa las mediciones reales y “h” las mediciones estimadas a partir de las variables de estado obtenidas en el proceso. Las diferencias entre ambas “(z-h)” elevadas al cuadrado y multiplicadas por los pesos (“W ii”) son sumadas para dar lugar a la función objetivo que se optimiza..
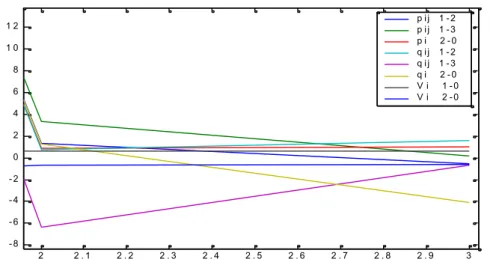
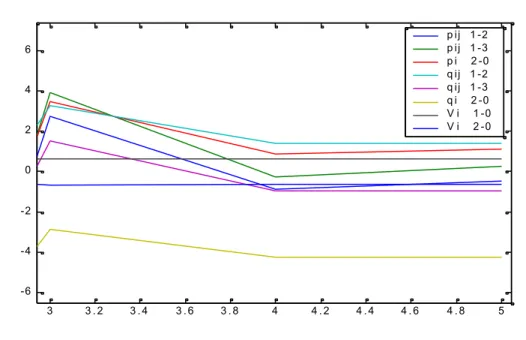
(41) CAPÍTULO 3. “Ejemplos de casos concretos”. 30. Tabla 3.4 Mediciones resultantes en la última iteración (algoritmo formal). Tipo. i-j. z. h. (z-h). (z-h)./z*100. pij pij pi qij qij qi Vi Vi. 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. +0.8880 +1.1730 -0.5010 +0.5680 +0.6630 -0.2860 +1.0060 +0.9680. +0.8930 +1.1711 -0.4959 +0.5588 +0.6677 -0.2977 +0.9996 +0.9742. -0.0050 +0.0019 -0.0051 +0.0092 -0.0047 +0.0117 +0.0064 -0.0062. -0.5619 +0.1623 +1.0124 +1.6153 -0.7036 -4.0998 +0.6331 -0.6361. Para este ejemplo en particular la medición que mayor error presenta es la correspondiente a la inyección de potencia reactiva en la barra dos. Esto se puede apreciar en las figuras 3.2 y 3.3. 120. p ij p ij pi q ij q ij qi Vi Vi. 100 80. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 60 40 20 0 -2 0. 1. 1.2. 1.4. 1.6. 1.8. 2. 2.2. 2.4. 2.6. 2.8. 3. Figura 3.2 Errores por tipo de medición (Algoritmo Formal)..
(42) CAPÍTULO 3. “Ejemplos de casos concretos”. 31. p ij p ij pi q ij q ij qi Vi Vi. 12 10 8 6. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 4 2 0 -2 -4 -6 -8. 2. 2 .1. 2 .2. 2 .3. 2 .4. 2 .5. 2 .6. 2 .7. 2 .8. 2 .9. 3. Figura 3.3 Ampliación (Algoritmo Formal). 3.1.2 Resultados del Algoritmo Desacoplado. Este algoritmo converge en cinco macro-iteraciones, para una tolerancia de 1x10-4. Estas cinco macro-iteraciones se deben a que se realizaron cinco iteraciones de ángulo, pero de voltaje solo fueron necesarias cuatro. El valor final de la función objetivo es J = 8.7334. Los valores estimados finales del algoritmo se muestran a continuación: Tabla 3.5 Voltajes estimados por el algoritmo desacoplado. Barra, i 1 2 3. V(p.u) 0.99974 0.97428 0.94402. A(Grados) 0 -1.2466 -2.7448. Los resultados de las mediciones calculadas a partir de los valores estimados de la última iteración se muestran en la tabla siguiente: Tabla 3.6 Mediciones resultantes en la última iteración (algoritmo desacoplado). Tipo pij pij pi qij qij qi. ij 1-2 1-3 2-0 1-2 1-3 2-0. z +0.8880 +1.1730 -0.5010 +0.5680 +0.6630 -0.2860. h +0.8922 +1.1702 -0.4955 +0.5600 +0.6695 -0.2982. (z-h) -0.0042 +0.0028 -0.0055 +0.0080 -0.0065 +0.0122. (z-h)./z*100 -0.4777 +0.2380 +1.0827 +1.4112 -0.9769 -4.2596.
(43) CAPÍTULO 3. “Ejemplos de casos concretos”. Vi Vi. 1-0 2-0. +1.0060 +0.9680. +0.9998 +0.9743. 32. +0.0062 -0.0063. +0.6200 -0.6469. Nótese que tanto los valores estimados para el ángulo y el módulo del voltaje son ligeramente diferentes a los valores estimados por el algoritmo formal. Por tanto los valores estimados de las mediciones también serán diferentes aunque muy similares. La medición que más error aporta sigue siendo la de inyección de potencia reactiva en la barra dos. A continuación se muestran dos figuras (3.4 y 3.5) representativas de este algoritmo. 200. p ij p ij pi q ij q ij qi Vi Vi. 150. 100. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 50. 0. -5 0. 1. 1.5. 2. 2.5. 3. 3.5. 4. 4.5. 5. Figura 3.4 Errores por tipo de medición (Algoritmo Desacoplado). Obsérvese que para las mediciones de potencia reactiva los errores en la primera iteración difieren con respecto al algoritmo formal. Esto se debe al empleo de aproximaciones en la construcción del modelo para lograr el desacople..
(44) CAPÍTULO 3. “Ejemplos de casos concretos”. 33. p ij p ij pi q ij q ij qi Vi Vi. 6 4 2. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 0. -2 -4 -6 3. 3.2. 3.4. 3.6. 3.8. 4. 4.2. 4.4. 4.6. 4.8. 5. Figura 3.5 Ampliación (Algoritmo Desacoplado). 3.1.3 Resultados del Algoritmo Desacoplado Rápido. Este algoritmo converge en cinco macro-iteraciones, para una tolerancia de 1x104. . Estas cinco macro-iteraciones se deben a que se realizaron cinco iteraciones de. ángulo, pero de voltaje solo fueron necesarias cuatro. El valor final de la función objetivo es J =8.7147. Los valores estimados finales del algoritmo se muestran a continuación: Tabla 3.7 Voltajes estimados por el algoritmo desacoplado rápido. Barra, i 1 2 3. V(p.u) 0.99965 0.97419 0.94392. A(Grados) 0 -1.2472 -2.7449. Los resultados de las mediciones calculadas a partir de los valores estimados de la última iteración se muestran en la tabla 3.8: En este caso también los valores estimados para el ángulo y el módulo del voltaje son ligeramente diferentes a los valores estimados por el algoritmo formal. Por tanto los valores estimados de las mediciones también serán diferentes aunque muy similares..
(45) CAPÍTULO 3. “Ejemplos de casos concretos”. 34. Tabla 3.8 Mediciones resultantes en la última iteración (algoritmo desacoplado rápido). Tipo pij pij pi qij qij qi Vi Vi. ij 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. z +0.8880 +1.1730 -0.5010 +0.5680 +0.6630 -0.2860 +1.0060 +0.9680. h +0.8924 +1.1703 -0.4956 +0.5597 +0.6695 -0.2977 +0.9997 +0.9742. (z-h) -0.0044 +0.0027 -0.0054 +0.0083 -0.0065 +0.0117 +0.0063 -0.0062. (z-h)./z*100 -0.4959 +0.2274 +1.0763 +1.4677 -0.9822 -4.0985 +0.6296 -0.6374. La medición que más error aporta sigue siendo la de inyección de potencia reactiva en la barra dos. A continuación se muestran dos figuras (3.6 y 3.7) donde se muestra el comportamiento de las mismas. 200. p ij p ij pi q ij q ij qi Vi Vi. 150. 100. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 50. 0. -5 0. 1. 1.5. 2. 2.5. 3. 3.5. 4. 4.5. 5. Figura 3.6 Errores por tipo de medición (Algoritmo Desacoplado Rápido). En este caso ocurre similar al algoritmo desacoplado donde para las mediciones de potencia reactiva los errores en la primera iteración difieren con respecto al algoritmo formal., es decir no parten del mismo punto. Esto se debe al empleo de aproximaciones en la construcción del modelo para lograr el desacople..
(46) CAPÍTULO 3. “Ejemplos de casos concretos”. 35. p ij p ij pi q ij q ij qi Vi Vi. 8 6 4 2. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 0 -2 -4 -6 -8 3. 3.2. 3.4. 3.6. 3.8. 4. 4.2. 4.4. 4.6. 4.8. 5. Figura 3.7Ampliación (Algoritmo Desacoplado Rápido). 3.1.4 Comparación entre los tres algoritmos. Si se colocan los valores estimados por los tres algoritmos se obtiene la siguiente tabla: Tabla 3.9 Voltajes estimados por los tres algoritmos. Barra, i 1 2 3. Formal V(p.u) A (Grad.) 0.99963 0 0.97416 -1.2475 0.94389 -2.7457. Desacoplado V(p.u) A (Grad.) 0.99974 0 0.97428 -1.2466 0.94402 -2.7448. Desacoplado-Rápido V(p.u) A (Grad.) 0.99965 0 0.97419 -1.2472 0.94392 -2.7449. Se puede apreciar que los valores del módulo coinciden hasta la tercera cifra a partir de la cual comienzan a diferir. Para los ángulos la similitud solo alcanza la segunda cifra después de la coma. Tabla 3.10 Valores de la Función Objetivo. Algoritmo Función Objetivo Totales Ángulo Voltaje Formal 8.6383 3 Desacoplado 8.7334 5 5 4 Desacoplado - Rápido 8.7147 5 5 4.
(47) CAPÍTULO 3. “Ejemplos de casos concretos”. 36. En la tabla comparativa anterior se puede apreciar que el algoritmo que más minimiza la función objetivo es el algoritmo formal, además converge en el menor número de iteraciones aunque los demás algoritmos presentados pueden ser más rápidos en cuanto a tiempo. 3.2. Ejemplo 2: Circuito de tres barras con mediciones virtuales.. En ciertos circuitos se hace necesaria la introducción de mediciones adicionales para lograr la observabilidad. En estos casos es efectivo emplear mediciones referentes a magnitudes como la potencia activa y reactiva inyectada en las barras donde no existe ni generación ni consumo de carga. Es decir la potencia inyectada es virtualmente nula. Resulta interesante analizar la respuesta del algoritmo WLS en cualquiera de sus versiones bajo estas condiciones. Especial atención se le debe dar al valor de la calidad de la medición en estos casos. Esto no solo es necesario dentro la formulación del problema, sino que asignarle valores excesivamente pequeños o nulos al parámetro de dispersión podría comprometer la convergencia general del algoritmo debido al mal condicionamiento que introduce dentro del proceso de inversión de las matrices de ganancia. Para analizar estos asuntos se tomó el ejemplo 4.6 página 143 de la referencia[15]. El mismo consiste en considerar inyección nula en la carga de la barra dos incrementando la carga de la barra tres con la carga removida de la dos. Los datos necesarios para las líneas del circuito y las mediciones se muestran a continuación. Tabla 3.11 Datos de línea de ejemplo 2. Línea Desde. Hasta. Resistencia R(p.u). 1 1 2. 2 3 3. 0.01 0.02 0.03. Reactancia X(p.u) 0.03 0.05 0.08. Susceptancia Total 2bs(p.u) 0.0 0.0 0.0.
(48) CAPÍTULO 3. “Ejemplos de casos concretos”. 37. Tabla 3.12 Datos de las mediciones del ejemplo 2. Medición, i 1 2 3 4 5 6 7 8. Tipo p12 p13 p2 q12 q13 q2 V1 V2. Valor (p.u). +0.6390 +1.4150 +0.0000 +0.4247 +0.8780 +0.0000 +1.0065 +0.9795. 0.008 0.008 3.1623e-4 0.008 0.008 3.1623e-4 0.004 0.004. Analizando las mediciones se puede notar que los pesos o ponderaciones correspondientes a las inyecciones nulas son alrededor de 1000 veces mayores que las de las mediciones normales. Esto trae consigo que el número de condición de la matriz de ganancia de este ejemplo sea aproximadamente ocho veces el número del ejemplo uno de este capítulo, siendo la topología y datos de red los mismos. El diagrama monolineal del circuito se muestra en la figura 3.8.. Figura 3.8Monolineal y configuración de mediciones del ejemplo 2. Con los datos de este ejemplo se corrieron los tres algoritmos: el algoritmo Formal, el Desacoplado y el Desacoplado-Rápido. Los resultados obtenidos se muestran a continuación..
(49) CAPÍTULO 3. “Ejemplos de casos concretos”. 38. 3.2.1 Resultados del Algoritmo Formal. Este algoritmo converge en tres iteraciones, para una tolerancia de 1x10-4. El valor final de la función objetivo es J =2.1306. Los valores estimados finales del algoritmo se muestran a continuación: Tabla 3.13 Voltajes estimados por el algoritmo formal. Barra, i 1 2 3. V(p.u) 1.0024 0.98348 0.93191. A(Grados) 0 -0.86582 -3.2652. Los resultados de las mediciones calculadas a partir de los valores estimados de la última iteración se muestran en la tabla siguiente: Tabla 3.14 Mediciones resultantes en la última iteración (algoritmo formal). Tipo pij pij pi qij qij qi Vi Vi. ij 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. z +0.6390 +1.4150 +0.0000 +0.4247 +0.8780 +0.0000 +1.0065 +0.9795. h +0.6381 +1.4156 +0.0001 +0.4246 +0.8784 +0.0000 +1.0024 +0.9835. (z-h) +0.0009 -0.0006 -0.0001 +0.0001 -0.0004 -0.0000 +0.0041 -0.0040. (z-h)./z*100 +0.1409 -0.0446 -Inf +0.0351 -0.0413 -Inf +0.4032 -0.4066. Como se puede ver en la tabla anterior el (z-h)./z*100brinda en dos ocasiones resultado infinito debido a la introducción de mediciones virtuales de valor nulo en ambos casos. Además, la diferencia entre lo virtualmente medido y lo estimado (zh) para las mediciones de inyección de potencia en la barra dos no es numéricamente nula según se esperaba. Esto se debe a que en el proceso las potencias estimadas se calculan con cierta tolerancia, lo que equivale a decir que no son consideradas intrínsecamente como nulas dentro del proceso. Esta es una deficiencia del algoritmo WLS. A continuación se muestran dos figuras (3.9 y 3.10) representativas de los errores de convergencia de este algoritmo, la primera de forma general y la segunda de forma ampliada..
(50) CAPÍTULO 3. “Ejemplos de casos concretos”. 39. 100. pij pij pi qij qij qi Vi Vi. 80. 60. 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. 40. 20. 0. -20. 1. 1.2. 1.4. 1.6. 1.8. 2. 2.2. 2.4. 2.6. 2.8. 3. Figura 3.9 Errores por tipo de medición (Algoritmo Formal). 12. pij pij pi qij qij qi Vi Vi. 10 8 6. 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. 4 2 0 -2 -4 -6 2. 2.1. 2.2. 2.3. 2.4. 2.5. 2.6. 2.7. 2.8. Figura 3.10 Ampliación (Algoritmo Formal).. 2.9. 3.
(51) CAPÍTULO 3. “Ejemplos de casos concretos”. 40. 3.2.2 Resultados del Algoritmo Desacoplado. Este algoritmo converge en seis macro-iteraciones, para una tolerancia de 1x10-4. Estas seis macro-iteraciones se deben a que se realizaron seis iteraciones de ángulo, pero de voltaje solo fueron necesarias cuatro. El valor final de la función objetivo es J =4.3157. Los valores estimados finales del algoritmo se muestran a continuación: Tabla 3.15 Voltajes estimados por el algoritmo desacoplado. Barra, i 1 2 3. V(p.u) 1.0025 0.98351 0.93194. A(Grados) 0 -0.86582 -3.2651. Los resultados de las mediciones calculadas a partir de los valores estimados de la última iteración se muestran en la tabla siguiente: Tabla 3.16 Mediciones resultantes en la última iteración (algoritmo desacoplado). Tipo pij pij pi qij qij qi Vi Vi. ij 1-2 1-3 2-0 1-2 1-3 2-0 1-0 2-0. z +0.6390 +1.4150 +0.0000 +0.4247 +0.8780 +0.0000 +1.0065 +0.9795. h +0.6381 +1.4154 -0.0000 +0.4258 +0.8802 -0.0005 +1.0025 +0.9835. (z-h) +0.0009 -0.0004 +0.0000 -0.0011 -0.0022 +0.0005 +0.0040 -0.0040. (z-h)./z*100 +0.1448 -0.0304 +Inf -0.2501 -0.2471 +Inf +0.3992 -0.4071. Es interesante notar que las diferencias (z-h) empeoran para la potencia reactiva inyectada en la barra dos respecto al algoritmo formal. A continuación se muestran dos figuras (3.11 y 3.12) representativas de este algoritmo, la primera de forma general y la segunda de forma ampliada..
(52) CAPÍTULO 3. “Ejemplos de casos concretos”. 41. 160. p ij p ij pi q ij q ij qi Vi Vi. 140 120 100 80. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 60 40 20 0 -2 0 -4 0. 1. 1.5. 2. 2.5. 3. 3.5. 4. 4.5. 5. Figura 3.11 Errores por tipo de medición (Algoritmo Desacoplado).. p ij p ij pi q ij q ij qi Vi Vi. 8 6 4. 1 -2 1 -3 2 -0 1 -2 1 -3 2 -0 1 -0 2 -0. 2 0 -2 -4. 3. 3.2. 3.4. 3.6. 3.8. 4. 4.2. 4.4. 4.6. 4.8. 5. Figura 3.12 Ampliación (Algoritmo Desacoplado). 3.2.3 Resultados del Algoritmo Desacoplado Rápido. Este algoritmo converge en cinco macro-iteraciones, para una tolerancia de. -4 1x10 .. Estas cinco macro-iteraciones se deben a que se realizaron cinco iteraciones de ángulo, pero de voltaje solo fueron necesarias cuatro. El valor final de la función.
Figure


+7

Outline
Documento similar