Diseño de un sistema de ductos de volumen de aire variable
163
0
0
Texto completo
(2) DEDICATORIA Esta tesis se la dedico a Dios, quién supo guiarme por el buen camino, enseñándome a enfrentar las adversidades. A mi familia, quienes son mi razón y mi fortaleza para seguir adelante cada día, por su compresión y paciencia; a mi menor hija Gisell quien es mi mayor motivación y la razón de que me levante cada día esforzándome más. A mis padres quienes son parte esencial de mi formación y por su incondicional apoyo, comprensión, y ejemplo de vida en todo momento. A mi hermano por ser siempre un apoyo, y de quien siempre me sentiré inmensamente orgulloso.. 2.
(3) RESUMEN El diseño del sistema del ducto es un factor importante para los sistemas de calefacción eficaz, eficiencia de la energía, ventilación y aire acondicionado. Los procedimientos de diseño del ducto comúnmente utilizados han sido desarrollados para sistemas de volumen de aire constante (VAC) y están basados en condiciones de diseño de carga máximas, para las cuales los caudales son asumidos para ser constantes todo el año. En esta tesis, el coste del ciclo de vida del sistema está relacionado con el impacto de la variación de la circulación de aire relacionado con el consumo de energía del ventilador. El coste del ciclo de vida del sistema se reduce al mínimo para encontrar los tamaños óptimos del ducto y para seleccionar un ventilador. Para propósitos de comparación, varios ejemplos de sistemas VAV son optimizados usando el método T seleccionando circulaciones de aire máximas mientras que los volúmenes de aire del diseño se optimizan otra vez usando un procedimiento de optimización que consideran las relaciones de las variaciones de la circulación de aire. Diferente del método T, se seleccionan tamaños del ducto como variables explícitas del diseño que tengan valores discretos, las características del ventilador de la parte-carga se consideran para encontrar las eficiencias del ventilador para diversas circulaciones de aire, y el control de la presión estática del ducto se incorpora en el cálculo de los costos de operación. . PALABRAS CLAVE: Diseño de ductos, método T, VAV, ASHRAE.. .. 3.
(4) ABSTRACT. The design of the duct system is an important factor for efficient heating systems, energy efficiency, ventilation and air conditioning. The commonly used duct design procedures have been developed for constant air volume (VAC) systems and are based on maximum load design conditions, for which flow rates are assumed to be constant throughout the year. In this thesis, the cost of the life cycle of the system is related to the impact of the variation of the air circulation related to the energy consumption of the ventilator. The cost of the system life cycle is reduced to a minimum to find the optimal duct sizes and to select a fan. For comparison purposes, several examples of VAV systems are optimized using the T method by selecting maximum airflows while the design air volumes are optimized again using an optimization procedure that considers the relationships of airflow variations . Different from method T, duct sizes are selected as explicit design variables that have discrete values, part-load fan characteristics are considered to find fan efficiencies for different air circulations, and static pressure control The pipeline is incorporated into the calculation of operating costs. KEYWORDS:. Duct design, method T, VAV, ASHRAE. 4.
(5) CAPITULO 1 – CONSIDERACIONES GENERALES 1.1. Justificación. 1. 1.2. Estado del Arte. 1. 1.3. Alcances. 2. 1.4. Objetivos. 2. 1.5. Hipótesis. 2. 1.6. Los sistemas de volumen de aire variable.. 2. 1.6.1.Caja terminal del VAV. 5. 1.7.Control de volumen del ventilador. 7. 1.8.Métodos de diseño del ducto. 9. 1.8.1.Método de la fricción pareja. 9. 1.8.2.Método de recuperación estática. 9. 1.8.3.El método T. 10. 1.9.Simulación de sistemas VAV. 17. 1.9.1.Optimización no lineal del número entero. 22. 1.9.3.Método de la función de la penalidad. 5.
(6) CAPÍTULO 2 EL SISTEMA DE VOLUMEN DE AIRE 2.1.Sistemas de volumen aire de variable. 30. 2.1.1.Caja terminal del VAV. 32. 2.2.Metodos de control de volumen del ventilador. 34. 2.2.1.Métodos de diseño del ducto. 36. 2.2.2.Método de la fricción pareja. 36. 2.2.3.Método de recuperación estática. 37. 2.2.4.El método T. 37. 2.3.Simulación de sistemas VAV. 44. 2.3.1.Optimización no lineal del número entero. 49. 2.3.3.Método de la función de la penalidad. 52. CAPITULO 3 SELECCIÓN DEL VENTILADOR Y CÁLCULO DE LOS GASTOS DE LA EXPLOTACIÓN 3.1.Introduccion. 57. 3.2. Formulación del modelado del ventilador y validación. 59. 3.2.1.Descripción matemática. 59. 3.2.2. Propuesta del modelado del ventilador y validación. 60. 3.2.3. Validación del modelo del ventilador. 65. 3.3. Selección del ventilador. 72. 3.3.1. Cálculo de la potencia del ventilador. 73 6.
(7) CAPITULO 4 METODOLOGIA DEL DISEÑO DEL SISTEMA DE DUCTOS 4.1.Introduccion. 76. 4.2. Consideraciones para el análisis del dominio del problema. 77. 4.2.1. Búsqueda exhaustiva. 77. 4.2.2. Método simplificado de Nelder y Mead. 80. 4.3. Análisis del dominio del problema para un sistema de VAC. 81. 4.3.1. Propuesta del sistema del ducto para el análisis. 81. 4.3.2. Diámetro de la sección del ducto limitada por la. 84. Limitación de la velocidad del aire 4.4.Resultados y discusión. 85. 4.4.1. Búsqueda exhaustiva. 86. 4.4.2. Representación grafica. 93. 4.4.3.Análisis por analogía gráfica. 96. 4.4.4. El método simplificado Downhill de Nelder y Mead. 101. 4.5. Análisis del dominio del problema para un sistema VAV. 101. 4.5.1. Un ejemplo del sistema del ducto para el análisis. 101. 4.5.2. Resultados y discusión. 104. 4.6. Conclusión de las características del problema. 108. CAPITULO 5 DESCRIPCIÓN DEL MODELO PARAMÉTRICO 5.1. Consideraciones iniciales. 111. 5.2. Coste del ducto. 111. 5.3. Tarifas de la energía eléctrica. 111 7.
(8) 5.4. Métodos de diseño del ducto aplicados. 114. 5.5. Ejemplo de sistemas del ducto. 116. 5.5.1. Ejemplo de ASHRAE. 116. 5.5.2. Edificio de oficinas grande. 120. CAPITULO VI ANALISIS DEL MODELO PARAMÉTRICO 6.1. Introducción. 131. 6.2. Comparación de los métodos de diseño del ducto. 132. 6.2.1. Análisis del coste del ciclo vital. 132. 6.2.2. Área superficial del ducto. 136. 6.3. Influencias en el diseño óptimo. 138. 6.3.1. Efecto de las tarifas de la electricidad en el diseño óptimo. 138. 6.3.2. Efecto del costo unitario de la canalización sobre el diseño óptimo. 141. 6.3.3. Efecto de la topología sobre el diseño óptimo. 143. 6.3.4. Efecto de los programas de circulación de aire. 143. 6.3.5. Resultados libres de la optimización. 145. 6.3.6. Dominio de la optimización. 147. CONCLUSIONES Y RECOMENDACIONES. 151. BIBLIOGRAFIA. 154. 8.
(9) 1. CAPITULO 1 – CONSIDERACIONES GENERALES 1.1. JUSTIFICACIÓN El diseño del sistema del ducto es un factor importante para los sistemas de calefacción eficaz, eficiencia de la energía, ventilación y aire acondicionado. Los procedimientos de diseño del ducto comúnmente utilizados han sido desgarro lados para sistemas de volumen de aire constante (VAC) y están basados en condiciones de diseño de carga máximas, para las cuales los caudales son asumidos para ser constantes todo el año. La optimización del sistema de ductos da la oportunidad de ahorrar energía y reducir el coste inicial. El método T encuentra tamaños óptimos del ducto y del ventilador para la óptima distribución de la presión a través del sistema para reducir al mínimo el coste del ciclo vital del sistema (ciclo de vida del sistema). El coste del ciclo vital del sistema incluye el coste inicial de la canalización basado en los tamaños óptimos del ducto y el coste energético eléctrico del ventilador a lo largo de todo el año. El coste inicial del ventilador no es incluido. 1.2. ESTADO DEL ARTE Edgar Iván Meneses Mendoza en su tesis ´¨Análisis y diseño para la propuesta de un sistema de ventilación adecuado para fogel de Centroamérica ,en el año 2008 ,presenta una tesis sobre la ingeniería de plantas, en la cual se encuentran los fundamentos sobre ventilación industrial; así como de las distintas normas existentes relacionadas con el tema ,los resultados de un estudio experimental del sistema de ventilación de un edifico de tipo comercial...Mario Torres en sus tesis de grado en la PUC(2014), propone el diseño de un sistema de ventilación mecánica para un estacionamiento subterráneo de tres niveles, perteneciente a un edificio educativo universitario, con el fin de mantener la concentración.
(10) 2. de monóxido de carbono en el ambiente por debajo de 25 ppm, cumpliendo con los requerimientos de diversas normas internacionales. 1.3. ALCANCES Se presentan tres métodos fundamentales de diseño del ducto en el manual de ASHRAE del año 2007: estos son; el método de fricción pareja, recuperación estática, y el método T. El método de fricción pareja y los métodos de recuperación estática fueron desarrollados como procedimientos oportunos y no dirigen la optimización. De los tres, el método T es el único método basado en la optimización y fue introducido por Tsal en 2008. Esta investigación analiza el funcionamiento de un sistema de ventilación industrial para el control del caudal a partir de la velocidad constante por amortiguador y de la velocidad variable utilizando el inversor de frecuencia. 1.4. OBJETIVOS El objetivo de este estudio es optimizar el diseño del ducto de los sistemas VAV. Primero, el sistema VAV es introducido comparado con un sistema de volumen de aire constante VAC para fomentar la comprensión del estudio. Una revisión comprensiva de los métodos de diseño del ducto presentada en el manual 1993 de ASHRAE también se discute en este capítulo. El T- Método o Método T es el único método basado en la optimización, así que sus procedimientos de la función objetiva y de optimización se describen detalladamente puesto que la función objetiva se desarrolla más a fondo de la definición de Tsal. La metodología de simulación del sistema, en la forma del programa informático AIRNET (red de la circulación de aire) desarrollado por Walton (1988) se describe. 1.5. HIPOTESIS Optimizar el diseño de los ductos para un sistema de volumen de aire variable. 1.6. LOS SISTEMAS DE VOLUMEN AIRE DE VARIABLE Los sistemas VAV se describen en varios libros de referencia del sistema HVAC (Chen y Demster, 1996; Wendes, 1994; Kreider y Rabl, 1994; McQuiston y Parker 1994). De las referencias precedentes, el sistema VAV se resume tal como sigue. La mayoría de los.
(11) 3. sistemas HVAC en el pasado eran los sistemas VAC que variaron la temperatura del aire entregado para mantener condiciones del espacio. Ejemplos típicos son sistemas comerciales o pequeños sistemas residenciales que entregan, por ejemplo, 1500 CFM con el quemador o acondicionador de aire que va por intervalos, cambiando la temperatura del aire para encontrar las condiciones de carga de la calefacción o refrigeración. Los ejemplos de sistemas comerciales grandes son; recalentamiento, ducto dual, y sistemas multizona. En los sistemas del recalentamiento, el aire condicionado constante es administrado desde una unidad central en una temperatura fija de aire frío diseñada para compensar la máxima carga de refrigeración en el espacio. Se activa la unidad del recalentamiento cuando la temperatura baja por debajo del límite superior de los ajustes de los instrumentos de control. Los sistemas de ducto duales tienen dos sistemas de ductos.. Las fuentes centrales del equipo de la estación suministran aire caliente a través de un funcionamiento del conducto y aire frío con otro funcionamiento. La temperatura en un espacio individual es controlada mezclando el aire caliente y frío en proporciones apropiadas. Los sistemas multizona proporcionan un solo conducto de fuente para cada zona y obtienen el control de la zona mezclando el aire caliente y frío en la unidad central en respuesta al lugar o a los termóstatos de la zona. Los sistemas VAC tienen ineficiencias significativas y perdidas de energía en la parte de la carga. Los tratantes del aire son también costosos para operar puesto que las relaciones de la circulación de aire no se pueden reducir en las condiciones de la parte - carga.. Un método de simplificar este problema es reducir la circulación de aire en las condiciones de la parte - carga. El sistema volumen aire variable (VAV) es un diseño comúnmente usado que reduce considerablemente el consumo de energía cuando la carga es disminuida.. El concepto básico de un sistema VAV es reducir la circulación de aire del sistema de niveles de carga completa siempre que las cargas sean menores que las cargas máximas..
(12) 4. Puesto que se reduce el flujo, la transferencia de energía en la bobina del tratante del aire así como la energía del ventilador también se reducen marcadamente. La Figura 2.1 demuestra un típico sistema VAV con un sistema opcional de recalentamiento. El sistema básico es un sistema que se refrigera solo, que modula la circulación del aire del sistema en respuesta a cargas de refrigeración según lo detectado por un termóstato de bulbo seco.. Como un subsistema separado, un sistema opcional de recalentamiento es necesario para las zonas con cargas de calefacción. Bajo condiciones de carga de refrigeración pico, el sistema VAV funciona idénticamente a un sistema de volumen fijo con el tratante del aire que opera en el flujo máximo y la capacidad máxima de la bobina de refrigeración. Sin embargo, en cargas de refrigeración reducidas, la corriente de aire del sistema es reducida por la acción combinada de cerrar los dampers de la zona de la caja de VAV y el regulador de velocidad del ventilador.. Figura 1.1: Sistema de aire de volumen variable con precalentador opcional..
(13) 5. Una característica general del control del sistema VAV es que uno debe asegurar el flujo adecuado en la zona más alejada del tratante del aire. Esto se logra tradicionalmente controlando la velocidad del ventilador de la fuente con una señal de la presión medida cerca del extremo del ducto según lo demostrado en la Figura 1.1. La circulación de aire real a cada zona es controlada por el control de los termostatos de la posición más húmeda (dámper). 1.6.1. CAJA TERMINAL DEL VAV1 Para la distribución confortable del aire dentro de una zona, el sistema VAV es modificado a menudo para proporcionar la circulación de aire constante mezclando el aire condicionado que varía (llamado aire primario) con el aire del lugar (llamado aire secundario) dentro de una caja de VAV. Según el método para combinar el aire primario y el aire secundario, las cajas de VAV tienen dos tipos:. (1) Cajas de VAV de inducción, y (2) Cajas de VAV accionadas por ventilador. En el método de inducción, el aire primario arrastra al aire secundario al cual inducen por medio de dampers de inducción de una caja de VAV. Las cajas de VAV accionadas por ventilador utilizan un pequeño ventilador para mezclar el aire primario y el aire secundario. La cantidad de aire primario es controlada por el dámper del aire primario que es controlado por el termóstato del lugar. Las cajas de VAV accionadas por ventilador se diseñan en serie o en paralelo. Los diagramas esquemáticos de cada tipo se muestran en las Figuras 1.2 y 1.3. Otra característica del flujo de las cajas de VAV es la dependencia del flujo sobre la presión de suministro del ducto. Las cajas de VAV que se diseñan para suministrar la circulación de aire constante a la zona para una señal dada del termóstato a pesar de variar, que ejercen presión sobre la canalización contracorriente desde la caja de 1. Chen, S. y Demster, S., (1996). Sistemas de volumen de aire variable para la calidad del ambiente. McGraw-Hill..
(14) 6. VAV son llamadas de presión - independiente. Las cajas de VAV que son sensibles a la presión del ducto de fuente se llaman de presión - dependiente.. Figura 1.2: Diagrama esquemático de la caja de VAV de inducción. (4). Figura 1.3: Diagramas esquemáticos de la caja de VAV accionada por un ventilador en serie y paralelo. (4).
(15) 7. 1.7. CONTROL DE VOLUMEN DEL VENTILADOR2 Los métodos de control de volumen del ventilador en el sistema VAV son un factor importante para el consumo de la electricidad del ventilador, así que se introducen brevemente aquí. Hay varios métodos para controlar la presión y el volumen de entrega de los ventiladores para los usos del VAV (Chen y Demster, 1995; Haines y Wilson, 1994; Kreider y Rabl, 1994).. . Un dámper de modulación en la descarga del ventilador. Un dámper simple en la salida puede acercarse para incrementar la resistencia y disminuir el flujo. Esto hace que suba la curva del ventilador y ahorre un poco de energía.. . Un puente desde la fuente para el retorno, con un dámper de modulación. Esto significa que el ventilador está funcionando a volumen constante todas las veces mientras que el volumen del sistema varía. Se obtiene un buen control pero no hay ahorros de energía.. . Dampers de la paleta de la entrada. Una cantidad pre-rotada y limitada de aire entra en la voluta del ventilador. Mientras que estos dampers modulan, cambian las características de funcionamiento del ventilador y se ahorra energía. Las veletas de admisión plantean una penalidad de energía a través de la resistencia añadida a la corriente de aire.. . Control electrónico de la velocidad. Se regula la velocidad del ventilador usando un control electrónico de la velocidad llamado impulsor de frecuencia variable (IFV), impulsor de velocidad variable (IVV), o inversor. Este dispositivo modula la energía que va al motor eléctrico de inducción de CA de modo que la velocidad del motor cambie en respuesta al cambio de la frecuencia de la energía producida por los impulsores electrónicos. Este método de control ahorra energía perceptiblemente puesto que el uso de la energía varía como el cubo de la velocidad, aunque hay algunas pérdidas en los circuitos eléctricos.. 2. Chen, S. y Demster, S., (1996). Sistemas de volumen de aire variable para la calidad del ambiente. McGraw-Hill..
(16) 8. . Así, se recomienda utilizar el método de la modulación de IVV para los ahorros de energía del ventilador. Los componentes básicos y sus características más importantes de los sistemas VAV se describen tal como sigue. 1.. Caja terminal del VAV: varía el volumen de aire que la atraviesa, basado en los requerimientos calentamiento/refrigeración de la zona.. 2.. Dispositivo de modulación del flujo del ventilador: el impulsor de velocidad variable sobre el motor, un dámper de entrada, un damper de descarga, etc.. 3.. Sensor de la presión estática: para detectar y medir la presión terminal del ducto cerca del extremo del ducto para asegurar un flujo adecuado en la zona. El mantenimiento de la presión estática se logra controlando el dispositivo de modulación del flujo del ventilador.. 4.. Ductos de distribución del aire: incluye el ducto de suministro principal, ramas y accesorios para la unión del ducto.. 5.. Dampers automáticos o manuales: controlan la salida del aire, aire de recirculación, retorno de aire y el aire mezclado.. 1.8.MÉTODOS DE DISEÑO DEL DUCTO3 Los métodos de diseño del conducto o ducto se presentan fundamentalmente en el manual ASHRAE (1997). Se presentan tres métodos: fricción pareja, recuperación estática, y el T método o método T. Como los métodos basados en la no optimización, el método de fricción pareja, son usados extensamente para sistemas de baja presión en la mayor parte de edificios y el método de recuperación estática es usado para sistemas muy grandes y de alta velocidad (Kreider y Rabl, 1994; Mcquiston y Parker, 1994). El método T, introducido por Tsal 1988, es el único método basado en la optimización, descrito en el manual ASHRAE. 1.8.1. MÉTODO DE LA FRICCIÓN PAREJA El principio del método de la fricción pareja es producir una pérdida constante de la presión por unidad de longitud para el sistema completo. El procedimiento generalmente es seleccionar la velocidad en el ducto principal adyacente al ventilador y entonces la relación. 3. ASHRAE, (1993). Base de datos ASHRAE para ductos.
(17) 9. conocida de la circulación de aire determina el tamaño del ducto y la perdida de presión por unidad de longitud. La misma pérdida de presión por unidad de longitud entonces se utiliza a través del sistema. Después del dimensionamiento inicial, la pérdida de la presión total de la carrera más larga es calculada incluyendo la pérdida de la presión dinámica de todos los accesorios y transiciones. Como un híbrido del método de fricción pareja, el método de fricción pareja equilibrada es introducido en la Guía ASHRAE - 2007. Después de que se decida la pérdida total de la presión, las secciones del ducto en la rama se vuelven a clasificar según el tamaño para balancear las pérdidas de la presión en cada unión. Un diseño bien equilibrado se puede producir con este acercamiento si todas las carreras del ventilador al difusor son de longitud casi igual. Sin embargo, la mayoría de los sistemas del conducto tienen una variedad de carreras del ducto que se extienden de largo a cortos rangos. Las carreras cortas tendrán que ser dampered, y pueden causar ruido considerable. Cuando el coste energético es alto y el coste instalado de la canalización es bajo, una baja relación de fricción de diseño es más económica que una relación de alta fricción. 1.8.2. MÉTODO DE RECUPERACION ESTÁTICA4 El método de la recuperación estática se basa en el requisito que la presión estática del sistema sigue siendo casi igual a través del sistema. Específicamente, los ductos se clasifican de modo que el aumento en la presión estática en una sección del ducto balancee exactamente la pérdida de la presión en la sección siguiente del ducto. El procedimiento es primero seleccionar una velocidad para el ducto unido al ventilador. Con la capacidad de la circulación de aire, el tamaño de este ducto principal se decide. El ducto que funciona es el que tiene la resistencia más grande del flujo, entonces se diseña, usando los accesorios y las disposiciones más eficientes posibles. Se asume una velocidad para la siguiente sección en la carrera y la recuperación de la presión estática se utiliza para superar las pérdidas de la fricción de la presión para esa sección. Este método es conveniente para sistemas de alta velocidad, sistemas de volumen constante que tienen carreras largas del ducto con muchos 4. Asiedu, Y., Besant, R.W., y Gu, P. 2000. Diseño Del Sistema Del Conducto de HVAC Usando Algoritmos Genéticos.
(18) 10. despegues. Las desventajas principales de este método son las velocidades muy bajas y los tamaños grandes del ducto que pueden resultar en el final de carreras largas. 1.8.3. EL METODO T5 El método T es un método basado en la optimización que reduce al mínimo el coste del ciclo vital (Tsal 1988). Este método está basado en la misma idea de la programación dinámica (Bellman 1957, Tsal y Chechik 1968). Se ha demostrado que los sistemas del ducto optimizados que usan el método T pueden dar lugar a costes entre el 12,2% y el 53,4% más bajos del ciclo vital sobre un sistema diseñado usando otros métodos (Tsal y Behls 1986). La meta de la optimización del ducto es determinar tamaños del ducto según las pérdidas óptimas de la presión y seleccionar un ventilador según la presión óptima del ventilador que reduce al mínimo los gastos de operación. La información sobre los gastos de operación para el sistema de HVAC se describe en el Manual HVAC de ASHRAE (1995). El cálculo de los costes anuales comprende el coste inicial, del análisis del período, del tipo de interés, y de otros costes periódicos. Los gastos de explotación o gastos de operación, incluyen el coste energético, el coste de mantenimiento, el trabajo de operación, y el coste de la escalada. Los gastos de operación y de posesión se juntan para desarrollar un análisis económico. El propósito de la optimización del sistema del ducto es comparar el costo del ciclo vital del sistema para diversos tamaños del ducto y dimensionar la presión total. Por consiguiente, muchos de los elementos constantes antedichos se pueden excluir de los costos del sistema y solamente el coste inicial, el coste energético, el período, la relación de la escalada y el tipo de interés se consideran para la optimización (Tsal y Behls 1990). El coste del ciclo vital se da por:. E E p PWEF ES Donde: E Es el coste del ciclo, $ 5. Tsal, R. J., y Adler, M. S., (1987). Evaluación de los métodos numéricos para la optimización de la canalización y de la tubería.. (1.1).
(19) 11. E P Es el coste de la energía anual, $. ES Es el coste inicial, $. PWEF Es el valor actual del factor de intensificación, sin dimensiones. El coste de la energía eléctrica se determina por EP Qven. ECY Ed Pven 103 g f g e. (1.2). Donde: Qven Es el caudal de la circulación de aire, m3/s (constante durante todo el año) Pven Es la presión total del ventilador, Pa (pulg. Peso) Ec Es el costo por unidad de energía, $/kWh Y Es el tiempo de operación del sistema, h/año. Ed Es el costo de la demanda de energía, $/kW g e Es la eficiencia del impulsor del motor, sin dimensiones. g f Es la eficiencia total del ventilador, sin dimensiones 103 Es una constante dimensional, 10-3 kW/ [(m3/s).(N/s)]. El coste de la demanda de energía eléctrica Ed se asume constante para efectos de simplificación. El valor actual del factor de intensificación es;.
(20) 12. 1 AER 1 AIR 1 PWEF 1 AER 1 1 AIR a. (1.3). Donde: AER Es la tarifa anual de la escalada, sin dimensiones. AIR Es el tipo de interés anual, sin dimensiones.. a es el período de amortización, en años.. El coste inicial se presenta como el coste del ducto, que es una función del coste por unidad de área de la superficie del ducto. Para un ducto redondo, el coste esta dado por: Es Sd DL. (1.4a). Donde: Sd es el coste de unidad de trabajo del ducto, incluyendo material y trabajo, $/m2 ($/pie2) D es el diámetro del ducto, m (pulg) L es la longitud del ducto, m(pulg). Para un ducto rectangular, el costo es: ES 2 Sd H W L. (1.4b). Donde: H es la longitud del ducto, m(pulg). W Es el ancho del ducto, m (pulg) A continuación se describen las restricciones necesarias para la optimización del ducto. Una explicación detallada de cada restricción se puede encontrar en Tsal y Adler (1987). . Equilibrio total. Para cada nodo, el flujo que ingresa es igual al flujo que sale..
(21) 13. . Equilibrio de presión. La pérdida de presión total en cada camino debe ser igual a la presión total del ventilador.. . Tamaños nominales del ducto. Cada diámetro de un ducto redondo, o la altura y la anchura de un ducto rectangular, se redondean al tamaño nominal más bajo o superior más cercano. El tamaño nominal del ducto depende normalmente del incremento estándar de los fabricantes. Tales incrementos pueden ser de 1 pulg. para los tamaños mayores de 20 pulgadas y entonces se incrementa en 2 pulgadas.. . Restricción de la velocidad del aire. Esto es una limitación acústica o de la partícula de transporte.. . Pre-selección de tamaños. Los diámetros del ducto, alturas y/o las anchuras pueden ser pre-seleccionadas.. . Restricciones de la construcción. Las limitaciones arquitectónicas del espacio pueden restringir los tamaños del ducto.. . Equipo. Las unidades centrales que manejan el aire y el equipo montado por ducto son seleccionados del set producido por la industria.. El método T considera el sistema del ducto como una estructura arborescente (estructura de árbol) y abarca los tres procedimientos principales siguientes: . Sistema de condensación.. Las ramas y las raíces del árbol se condensan. sistemáticamente en una sola sección imaginaria del ducto con características hidráulicas idénticas y el mismo coste de posesión como un sistema completo. Substituyendo la ecuación (1,2) y (1,4) en la ecuación (1,1), el coste del ciclo vital es: Para un ducto circular: E Z1 Pven Sd DL. (1.5a). Para un ducto rectangular: E Z1 Pven Sd 2 H W L. Donde: Z1 Qven. EcY Ed 10 3 g f g e. (1.5b).
(22) 14. La ecuación de Darcy-Weisbach para el ducto redondo y rectangular es: 2 fL V P C D 2 gc. (1.6). Introduciendo el coeficiente r, r fL CD. Substituyendo r en la ecuación (1.6) y reacomodando; D 0.959 rp Q 0.4 gc P . 0.2. 0.2. Substituyendo D en la ecuación (1.4a) da el coste inicial como sigue; ES Z 2 K P . 0.2. (1.7). Donde; Z 2 0.959 / g c S d 0.2. K n r 0.2Q0.4 L , coeficiente característico de una sección del ducto. n 1 Para un ducto redondo o circular. n 1.128 para un ducto cuadrado H W para un ducto rectangular n H W 1. Finalmente, el coste del ciclo vital del sistema se convierte en: E Z1 Pven Z 2 K P . 0.2. El costo del ciclo vital del sistema para dos secciones del ducto es:. (1.8).
(23) 15. E1 2 E1 E2. . E1 2 Z1 P1 P2 Z2 K1 P1 . 0.2. K2 P2 . 0.2. . (1.9). Tomando las derivadas parciales de la ecuación (1.9) con respecto a P1 y P2 , fijando a cero, resolviendo para las pérdidas de la presión, el cociente óptimo de la presión es como sigue; P1 K1 P2 K 2 . 0.833. (1.10). Cuando dos secciones del ducto están conectadas en serie; P1 2 P1 P2. (1.11). Usando las ecuaciones (1.10) y (1.11), la ecuación (1.9) se convierte en;. . E1 2 Z1 P1 P2 Z2 K1 P1 . . E1 2 Z1 P1 2 Z 2 K1. 0.2. 0.833. K2. K2 P2 . 0.2. . 0.833 1.2. . P1 2 0.2. E1 2 Z1 P1 2 Z2 K1 2 P1 2 . 0.2. (1.12). Así, el coeficiente característico de una sección condensada del ducto, que está conectada en serie, se describe por;. . K1 2 K1. 0.833. K2. . 0.8333 1.2. (1.13). Cuando dos secciones están conectadas en paralelo; P1 2 P1 P2. (1.14). La ecuación (1.9) se transforma en;. E1 2 Z1 P1 2 Z2 K1 K2 P1 2 . 0.2.
(24) 16. Así, el coeficiente característico de una sección condensada del ducto, que está conectada en paralelo, se describe por; K1 2 K1 K 2. (1.15). Las ecuaciones de Tsal; (1,13) y (1,15) se aplican de unión en unión en la dirección de la sección de la raíz para así condensar el sistema entero en una sección. . Selección del ventilador. Del sistema condensado, se calcula y se utiliza la presión óptima ideal del total del ventilador para seleccionar un ventilador. Si se selecciona un ventilador con una presión diferente, su presión se considera óptima. Tomando la derivada de la ecuación (1.8) con respecto a P , fijando a cero, y solucionando para la pérdida de la presión, la presión óptima del ventilador se convierte en; P 0.26 Z 2 / Z1 K . 0.833. Px. (1.16). Donde; K es el coeficiente característico de la sección condensada de la raíz.. Px es una pérdida adicional de la presión.. . Extensión de sistema. La sección imaginaria del ducto es ampliada en el sistema original distribuyendo la presión optimizada del ventilador. La pérdida de la presión del ducto en la sección i es; Pi Pi Ti. (1.17). Donde; Pi P1 i , presión restante de la sección i del ducto a la sección terminal 1 del ducto. Ti K i / K1 i . 0.833. , factor T en la sección i del ducto.. A diferencia del procedimiento de condensación, el procedimiento de extensión comienza en la sección de la raíz y continúa en dirección de los terminales. Una explicación detallada de cada procedimiento importante se puede encontrar en Tsal (1988). Muchos parámetros son desconocidos al principio y tienen que ser definidos durante el proceso iterativo, tal.
(25) 17. como los coeficientes C para las ensambladuras y las transiciones puesto que dependen del tamaño del conducto. También, el ventilador no puede ser seleccionado hasta que se conozca el coeficiente K del sistema. Generalmente, son suficientes tres iteraciones para obtener la solución óptima exacta (Tsal 1988). El tamaño redondeado para seleccionar un tamaño nominal más bajo o superior del ducto es también una preocupación de la optimización. Si se selecciona el tamaño nominal más bajo, el coste inicial disminuye, pero la pérdida de la presión aumenta y puede exceder la presión del ventilador. Si se selecciona el tamaño nominal superior, los aumentos iniciales del coste excepto la pérdida de la presión de la sección disminuyen. Esta presión ahorrada se puede utilizar para seleccionar un tamaño nominal más bajo para la siguiente sección del ducto. El método T tiene los procedimientos que predicen cómo los tamaños nominales más bajos y superiores de un ducto influencian en el coste inicial para la sección de redondeo del ducto y las secciones restantes del ducto. El tamaño nominal que produce un coste inicial más bajo se selecciona como el diámetro redondeado. La pérdida de la presión sustraída de la sección redondeada del ducto se utiliza como el valor superior para redondear las secciones de los hijos. El procedimiento de redondeo comienza en la sección de la raíz y continúa en la dirección de los terminales. 1.9. SIMULACIÓN DE SISTEMAS VAV Para simular la operación de un edificio usando un sistema VAV, es necesario determinar la cantidad de aire requerida para encontrar la carga, que se puede hacer con cualquier programa de cálculo de la carga. Para esta tesis, se usaron el análisis de las cargas del edificio y el programa de la termodinámica del sistema (BLAST 1986). Considerando las relaciones de la circulación de aire dentro y fuera de las zonas por la canalización y los requerimientos del extractor, las presiones del edificio pueden ser calculadas. El programa llamado AIRNET (Walton 1989) para la red de la circulación de aire del edificio modelado, que fue desarrollado por el National Institute of Standards and Technology (Instituto Nacional de Estandarización y Tecnología) (NISTIR 89-4072), proporciona un método para estimar las circulaciones de aire y a las presiones en edificios. Una red de la circulación de aire del edificio consiste en un sistema de nodos, de elementos, y de acoplamientos. Las diversas zonas en los edificios, los puntos de conexión en la.
(26) 18. canalización, y el ambiente circundante son puntos donde la circulación de aire y las presiones son de interés. Estos puntos se representan como nodos en una red. Los elementos de la circulación de aire representan pasos entre los nodos, tales como los ductos, los ventiladores, los dampers, las grietas, las puertas, etc. Todos los nodos son conectados por unos o más elementos de la circulación de aire. Los acoplamientos describen cómo los nodos y los elementos están conectados. Un sistema de tales acoplamientos hace una red completa de HVAC del edificio. Los módulos del programa para el análisis de la circulación de aire en AIRNET son tal como siguen: 1.. Un proceso para establecer un sistema inicial de valores para comenzar el proceso iterativo de la solución.. 2.. Un método de solución para ecuaciones no lineales que usan el método de Newton y un proceso de solución de Skyline de métodos escasos de la matriz (Dhatt y Touzot, 1984) para reducir tanto el tiempo de ejecución como el almacenaje, combinado con la iteración de Steffensen (Conte y de Boor, 1972) aceleran la convergencia.. 3.. Los subprogramas del elemento de la circulación de aire que computan el caudal y la derivada del flujo con respecto a la diferencia de la presión necesitaron formar la matriz Jacobiana.. 4.. Un proceso separado para transferir los datos en la matriz Jacobiana.. 5.. Solución de las ecuaciones lineares simultáneas que implican la matriz Jacobiana.. Las ecuaciones del equilibrio total o equilibrio de masas son las ecuaciones básicas que gobiernan los flujos en una red de circulación de aire. . m i. . entreda. i m salida. Donde; i es el número del nodo.. La relación entre el índice de flujo de masas y las presiones puede ser descrita como:. (1.18).
(27) 19. . m f P . (1.19). Debido a que el modelado de diferentes elementos implica relaciones no lineales, es necesario un proceso de iteración para llegar a la solución. Los siguientes tipos de elementos del flujo se simulan en el programa AIRNET. . Resistencia: El caudal total del aire a través de cualquier restricción sigue la relación empírica de la forma: . m C P x. (1.20). Donde;. C es el coeficiente del flujo. es la densidad del aire, kg/m3 P es la pérdida total de la presión a través del elemento, Pa. x es el exponente del flujo.. . Ductos: La pérdida de la presión debido a la fricción en una sección de un ducto o de una tubería se da por: Pf . Donde;. f es el coeficiente de fricción L es la longitud del ducto, m D es el diámetro hidráulico, m. V es la velocidad del aire, m/s. fL V 2 D 2. (1.21).
(28) 20. . Accesorios del ducto: Las pérdidas de presión dinámicas debido a accesorios están dadas por: Pd Co. V 2. (1.22). 2. Donde; C0 es el coeficiente de pérdida dinámico.. La pérdida total de la presión se puede entonces calcular como; P Pf Pd. (1.23). De las ecuaciones anteriores, se calcula el caudal usando la relación; 2 A2. . m. . f L D C 0 . P. (1.24). Ventiladores: Para simular exactamente el funcionamiento de un ventilador, las curvas de funcionamiento del ventilador han ajustadas a un polinomio de la forma: . . . P a0 a1 m a2 m 2 a3 m 3 .... (1.25). Donde: a0 , a1 , a2 , a3 ,... son los coeficientes del polinomio que encaja la curva del. funcionamiento del ventilador a una velocidad nominal. . Usando AIRNET, Delp (1993) se modeló siete tipos básicos de sistemas de control de VAV para proporcionar el control del mínimo del aire de ventilación exterior y la presurización del edificio. Todos los sistemas tienen un ventilador de suministro cuya velocidad, y así la corriente de aire, son controlados por un regulador de presión estática. Los siete tipos básicos son: 1.. Ventilador de retorno, con control de la capacidad secuenciado desde el control de la señal de la capacidad de suministro de aire (presión estática)..
(29) 21. 2.. Ventilador de retorno, con el control de la capacidad basado en la presión del edificio.. 3.. Ventilador de retorno, con el control de la capacidad basado en la diferencial de la circulación de aire entre la fuente y las cantidades de retorno.. 4.. Ventilador de alivio (extractor), con el control de la capacidad basado en la presión del edificio.. 5.. Ventilador de alivio (extractor), con el control de la capacidad basado en la posición exterior del dámper del aire.. 6.. Sin ventilador de alivio ni de retorno, con la presión del edificio controlada por los dampers de alivio basados en la presión del edificio.. 7.. Los dampers de alivio controlados por el cociente de la presión a través del apagador de retorno del aire juntado con la adición de una inyección de aire de un ventilador exterior.. Todos estos sistemas de control deben ser capaces de hacer lo siguiente para una operación apropiada: . Mantener la presión estática del ducto de modo que las unidades terminales funcionen correctamente.. . Mantener la presión levemente positiva en el espacio condicionado para prevenir la infiltración del aire exterior en las zonas.. . Proveer el mínimo aire exterior al espacio condicionado excepto durante la operación del ahorrador.. Además de los elementos descritos en AIRNET, Delp (1993) dampers modelados y las cajas de VAV usando la relación para la resistencia. Si el dámper se fija a un ángulo particular, tendría una resistencia fija. Para explicar la resistencia del dámper que varía, la relación siguiente se da para los dampers: . m C v n P x. El modelado de las cajas de VAV fue hecho de manera semejante que un dámper.. (1.26).
(30) 22. Para la simulación del sistema, fue seleccionado AIRNET y fue separado un algoritmo que simula la operación de los sistemas de VAV y fue desarrollado de modo que las cargas de la zona pudieran ser satisfechas. El archivo de datos de control que describe las condiciones de funcionamiento deseadas, tales como la presión estática deseada del ducto se extiende para la fuente y el control del ventilador de retorno, el aire exterior requerido, y la presión del edificio deseada se da como entrada para la simulación.. 1.9.1. OPTIMIZACIÓN NO LINEAL DEL NÚMERO ENTERO. La mayoría de los métodos de optimización se han desarrollado bajo el hecho de asumir implícitamente que las variables del diseño tienen valores continuos. En muchas situaciones prácticas, sin embargo, las variables del diseño se eligen de una lista de valores comúnmente disponibles, por ejemplo áreas seccionadas transversalmente de entramados, del grosor de las placas, y de las membranas. Además, en el diseño óptimo de los sistemas del ducto, los ductos tienen valores discretos que dependan normalmente del incremento estándar de los fabricantes.. El método de la rama y el método del límite o simplemente El método de rama y del límite (R&L), es un algoritmo extensamente usado para solucionar problemas de la programación del número entero (IP). Sin embargo, el método original de R&L no es conveniente para solucionar un problema de programación no lineal del número entero (NIP), sobre todo porque la validez de las reglas de ramificación están vinculadas con una linealidad asumida (Yokota 1996). Lee (1983) soluciono varios problemas no lineales de la ingeniería usando el método de R&L basado en un código de optimización no lineal llamado BIAS, donde el procedimiento de R&L altera simplemente los límites superiores y más bajos en las variables. Hager y Balling (1988) buscaron un grado óptimo discreto en la vecindad del grado óptimo continuo usando un método modificado de R&L. Olsen y Vanderplaats (1989) presentaron un método de programación discreta secuencial lineal y convirtieron el problema discreto no lineal en una secuencia de problemas lineales (0, 1). El acercamiento.
(31) 23. de la penalidad para los problemas del NIP es otro método popular en la optimización estructural. Fu (1991) desarrollo un algoritmo que impone penas del número entero o de la violación discreta ante la función objetiva para hacer cumplir la búsqueda para converger a los valores estándares discretos. Lin y Hajela (1992) presentaron el acercamiento de genética artificial para la optimización discreta global de los problemas estructurales del diseño, que es un simple algoritmo genético modificado propuesto por Goldberg, basado en la genética natural. Después, el método de R&L y el acercamiento de la penalidad se discuten para la optimización no lineal con variables discretas del diseño. 1.9.2. EL METODO DE RAMA Y DEL LÍMITE El método de rama y del límite (R&L) se basa en convertir el espacio de la solución del número entero a un espacio continuo haciendo caer inicialmente las condiciones del número entero. Después de obtener el grado óptimo continuo, el método forma los nuevos sub-problemas, llamados 'los candidatos'. Por ramificación, estos candidatos excluyen la región (no-discreta) factible, e incluyen todos los puntos factibles del número entero del problema. Los límites son utilizados para desechar rápidamente a muchos de los candidatos posibles desarrollando un límite en el valor objetivo óptimo del problema del número entero. Cualesquiera de los candidatos que cuyo valor de la función objetiva cae fuera del límite pueden ser desechados como no-promisorios. La lógica para la rama no lineal y el algoritmo del límite es que cada uno de los problemas de programación individuales no lineales que se levantan en el procedimiento de solución es solucionado usando un método de optimización eficiente no lineal. Así, las restricciones actuales se manejan por separado de los límites variables. El procedimiento de la solución básica para el problema de programación no lineal puede ser resumido tal como sigue: . Paso 1: Soluciona el problema original de NLP, ignorando cualquier restricción del número entero.. . Paso 2: Determina el tipo de variable del diseño. Si la variable del diseño requiere ser un número entero, entonces vaya al paso 3. Si la variable del diseño requiere ser discreta, entonces vaya al paso 4. Si la variable del diseño requiere ser un valor verdadero continuo, entonces vaya al paso 5..
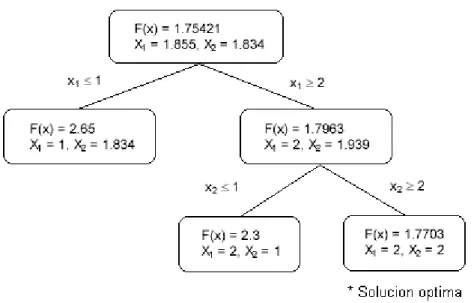
(32) 24. . Paso 3: la variable del diseño que se requiere para ser un número entero en la solución final, dice que Xi, es bifurcado de la manera siguiente: deje a la variable ser P + Q donde P es la parte de número entero de Xi y Q es la parte fraccionaria. Si P es definido como el número entero más grande que no excede a P + Q, entonces la región P < Xi < P + 1 no contiene ningún valor de número entero factible, y dos nuevas ramas pueden ser creadas imponiendo las restricciones Xi ≤ P y Xi ≥ P+1 sobre los problemas actuales.. . Paso 4: la variable del diseño que se requiere para ser una variable discreta en la solución final, dice que Xj es bifurcado de la manera siguiente: deje a la variable ser R. Si el valor discreto de Dk es definido como la variable discreta más grande que no excede a R, y Dk+1 es definido como la variable discreta más pequeña que excede a R, entonces la región Dk < R < Dk+1 no contiene ningún valor factible discreto, y dos nuevos problemas (ramas) pueden ser creados imponiendo las restricciones Xj ≤ Dk y Xj ≥ Dk+1 en el problema actual.. . Paso 5: Si un número entero o un resultado discreto de la solución se convierte en un límite superior en el valor final de la función objetiva entonces todos los nodos con un valor mayor que este límite superior se pueden eliminar de la búsqueda.. . Paso 6: Si todos los nodos han sido eliminados, el procedimiento de solución es terminado. Si todavía existe un nodo, entonces la siguiente variable requerida de número entero o la variable discreta se ramifica, y el paso 2, 3 y 4 se repiten hasta todo número entero requerido o las variables discretas se hayan ramificado, con el límite superior actualizado al mejor número entero o solución variable discreta encontrada.. . Paso 7: Una vez que todo número entero requerido o variables discretas se hayan ramificado y todavía existe un nodo de ramificación, entonces el número entero requerido o el valor discreto se ramifica, y se repite este paso hasta que se han eliminado todos los nodos.. Para ilustrar el uso del método R&L, se introduce el ejemplo siguiente con dos variables, discutidas previamente por Lee (1983). El problema es como sigue: Reduzca al mínimo;.
(33) 25. . . . 1 x22 x12 x12 100 2 12 x1 4 x12 x12 x22 f x 10. . . Donde xi debe ser número entero. 1 xi 3 , i 1, 2. El procedimiento de la solución del problema se demuestra en la Figura 2.4. La solución óptima sin la restricción del número entero es x1 1.855 , x2 1.834 con f x 1.7542 tal como se muestra en el nodo 1. El procedimiento de la solución del número entero comienza al caer la restricción del número entero en x 1 y x2. Puesto que x1 requiere ser un número entero, el rango 1 < x1 < 2 se suprime de la solución del espacio continuo sin suprimir ningún valor factible del número entero. Es decir, dos restricciones x1 ≤ 1 y x1 ≥ 2 son aplicadas al nodo 1 para efectuar la cancelación de la región 1 < x 1 < 2 del espacio continuo. Esto da lugar a los dos nodos, nodo 2 y nodo 3. Esto quiere decir que dos nuevas ramas son creadas imponiendo los limites x1 ≤ 1 y x1 ≥ 2. Se continúa esta rama y limite del algoritmo hasta que se logran todas las soluciones del número entero. Cada paso de la solución se ilustra en la Figura 1.4.. Figura 1.4: Pasos de la solución del problema del ejemplo. (17).
(34) 26. 1.9.3. MÉTODO DE LA FUNCIÓN DE LA PENALIDAD6 El método de la función de la penalidad impone las penas del número entero o de la violación discreta ante la función objetiva para efectuar la búsqueda de manera que la solución converja a los valores estándares discretos, basado en un algoritmo de optimización comúnmente empleado. En sistemas de ductos, el diámetro de un ducto redondo, o la altura y la anchura de un ducto rectangular son variables discretas y la restricción de las dimensiones nominales del ducto se puede resolver usando el acercamiento de la función de la penalidad. Cualquier violación de la restricción se agrega al coste del ciclo vital para hacer cumplir la búsqueda para converger a los tamaños discretos del ducto. En general, un problema de optimización discreto puede ser representado como un problema matemático de programación no lineal de la forma: Min. f X ,. X En. Conforme a:. hi X 0. i 1,...,m. Gi X 0. i m 1,..., p. (1.27). li xi ui. . X x1 , x2 , ..., xn X c , X d T. . T. X c R c : subconjunto factible de variables continúas de diseño. X d R d : subconjunto factible de variables discretas de diseño.. li y ui : los límites más bajos y superiores para las variables del diseño.. La función objetiva se puede ampliar en una forma aumentada generalizada para incluir los términos de la penalidad para la violación de las condiciones para seleccionar los valores de las variables discretas especificadas. 6. Tsal, R. J., y Adler, M. S., (1987). Evaluación de los métodos numéricos para la optimización de la canalización y de la tubería..
(35) 27. . F X f X P X d. . Donde P X d. (1.28). es la pena sobre la violación del valor discreto especificado.. La función de la penalidad sobre este enfoque se define como;. . . P Xd Q Xd. . (1.29). Donde;. . Q X d 4q j 1 q j jd. Y qj. x s. j u j. s1j . s1j . s1j y s uj son los valores discretos factibles más bajos y superiores más cercanos.. Cai y Thierauf (1993) discutieron la opción apropiada de . . Para . recomienda seleccionar 1 o 2. Un valor más grande de β hace la convergencia a la solución discreta más baja. La opción del valor de γ influencia fuertemente en la convergencia de la función objetiva y se sugiere estimar la siguiente ecuación:. . F X m f X m Q. (1.30). Donde; Xm . Sl Su 2. . . . . Y S l s l1 , ... s l n y S u s u1 , ... s u n son los más cercanos puntos discretos más bajos y superiores del punto de partida X0..
(36) 28. En el proceso de solución, un valor inicial γ es estimado de la ecuación. Cuando la búsqueda subsiguiente se hace iterativa, el factor γ se aumenta gradualmente tal como sigue:. k 1 c k . (1.31). Donde c es un valor constante en el intervalo 1 c 2 . A fin de ilustrar la aplicación del método de la función de penalidad, el siguiente entramado de 10 barras se muestra en la Figura 1.5, previamente introducido por Cai y Thierauf (1993).. Figura 1.5: Entramado de 10 barras. (9) La función objetiva del problema es el peso de la estructura. Las variables del diseño son las áreas de los 10 miembros seccionadas transversalmente. Las restricciones son las tensiones del miembro y los desplazamientos verticales de los nodos 2 y 4. El desplazamiento permisible es limitado a 2 pulgadas y la tensión permisible de ± 25 ksi. Los parámetros de diseño son; E = 104 ksi F = 100 kips ρ = 0.1 lb/pulg3, y a = 360 pulg Según el manual de AISC, una discretización para las áreas seccionadas transversalmente es;.
(37) 29. S = (1.62, 1.80, 1.99, 2.13, 2.38, 2.62, 2.63, 2.88, 2.93, 3.09, 3.13, 3.88, 3.47, 3.55, 3.63, 3.84, 3.87, 3.88, 4.18, 4.22, 4.49, 4.59, 4.80, 4.97, 5.12, 5.74, 7.22, 7.97, 11.50, 13.50, 13.90, 14.20, 15.50, 16.00, 16.90, 18.80, 19.90, 22.00, 22.90, 26.50, 30.00, 33.50) (pulg2). El valor de los factores c y β y el parámetro de exactitud ε fueron elegidos como; c = 1.5,. β = 1.0,. ε = 0.005. Y el valor inicial del factor de la penalidad fue calculado con la ecuación (1.30). En el cálculo, la solución continua fue encontrada después de la primera iteración usando un código de programación secuencial cuadrática NLPQL. Solamente una iteración más fue procesada para obtener la solución discreta.. El valor mínimo es 5491,71 libras.. El. resultado se muestra en la Tabla 1.1. Tabla 1.1: Resultados para el problema del entramado de 10 barras.. F (lb.). X1. X2. X3. X4. X5. X6. X7. X8. X9. X10. 1. 5482.5. 32.11. 1.6. 23.18. 15.39. 1.6. 1.6. 8.31. 22.76. 21.56. 1.6. *. 6. 4. 2. 6. 6. 2. 2. 4. 1. 7. 2. 2. 5491.7. 33.50. 1.6. 22.90. 15.50. 1.6. 1.6. 7.97. 22.00. 22.00. 1.6. *. 1. 2. 2. 2. 1*: Solución continúa con NLPQL 2*: Solución discreta con la combinación de los algoritmos de la penalidad y de NLPQL. Fuente Tsal, R. J., y Adler, M. S., (1987). Evaluación de los métodos numéricos para la Optimización de la canalización y de la tubería.. 2.
(38) 30. CAPÍTULO 2 EL SISTEMA DE VOLUMEN DE AIRE 2.1. SISTEMAS DE VOLUMEN AIRE DE VARIABLE Los sistemas VAV se describen en varios libros de referencia del sistema HVAC (Chen y Demster, 1996; Wendes, 1994; Kreider y Rabl, 1994; McQuiston y Parker 1994). De las referencias precedentes, el sistema VAV se resume tal como sigue. La mayoría de los sistemas HVAC en el pasado eran los sistemas VAC que variaron la temperatura del aire entregado para mantener condiciones del espacio. Ejemplos típicos son sistemas comerciales o pequeños sistemas residenciales que entregan, por ejemplo, 1500 CFM con el quemador o acondicionador de aire que va por intervalos, cambiando la temperatura del aire para encontrar las condiciones de carga de la calefacción o refrigeración. Los ejemplos de sistemas comerciales grandes son; recalentamiento, ducto dual, y sistemas multizona. En los sistemas del recalentamiento, el aire condicionado constante es administrado desde una unidad central en una temperatura fija de aire frío diseñada para compensar la máxima carga de refrigeración en el espacio. Se activa la unidad del recalentamiento cuando la temperatura baja por debajo del límite superior de los ajustes de los instrumentos de control. Los sistemas de ducto duales tienen dos sistemas de ductos.. Las fuentes centrales del equipo de la estación suministran aire caliente a través de un funcionamiento del conducto y aire frío con otro funcionamiento. La temperatura en un espacio individual es controlada mezclando el aire caliente y frío en proporciones apropiadas. Los sistemas multizona proporcionan un solo conducto de fuente para cada zona y obtienen el control de la zona mezclando el aire caliente y frío en la unidad central en respuesta al lugar o a los termóstatos de la zona. Los sistemas VAC tienen ineficiencias significativas y perdidas de energía en la parte de la carga. Los tratantes del aire son.
(39) 31. también costosos para operar puesto que las relaciones de la circulación de aire no se pueden reducir en las condiciones de la parte - carga.. Un método de simplificar este problema es reducir la circulación de aire en las condiciones de la parte - carga. El sistema volumen aire variable (VAV) es un diseño comúnmente usado que reduce considerablemente el consumo de energía cuando la carga es disminuida.. El concepto básico de un sistema VAV es reducir la circulación de aire del sistema de niveles de carga completa siempre que las cargas sean menores que las cargas máximas. Puesto que se reduce el flujo, la transferencia de energía en la bobina del tratante del aire así como la energía del ventilador también se reducen marcadamente. La Figura 2.1 demuestra un típico sistema VAV con un sistema opcional de recalentamiento. El sistema básico es un sistema que se refrigera solo, que modula la circulación del aire del sistema en respuesta a cargas de refrigeración según lo detectado por un termóstato de bulbo seco. Como un subsistema separado, un sistema opcional de recalentamiento es necesario para las zonas con cargas de calefacción. Bajo condiciones de carga de refrigeración pico, el sistema VAV funciona idénticamente a un sistema de volumen fijo con el tratante del aire que opera en el flujo máximo y la capacidad máxima de la bobina de refrigeración. Sin embargo, en cargas de refrigeración reducidas, la corriente de aire del sistema es reducida por la acción combinada de cerrar los dampers de la zona de la caja de VAV y el regulador de velocidad del ventilador..
(40) 32. Figura 2.1: Sistema de aire de volumen variable con precalentador opcional. (17). Una característica general del control del sistema VAV es que uno debe asegurar el flujo adecuado en la zona más alejada del tratante del aire. Esto se logra tradicionalmente controlando la velocidad del ventilador de la fuente con una señal de la presión medida cerca del extremo del ducto según lo demostrado en la Figura 2.1. La circulación de aire real a cada zona es controlada por el control de los termostatos de la posición más húmeda (dámper). 2.1.1. CAJA TERMINAL DEL VAV Para la distribución confortable del aire dentro de una zona, el sistema VAV es modificado a menudo para proporcionar la circulación de aire constante mezclando el aire condicionado que varía (llamado aire primario) con el aire del lugar (llamado aire secundario) dentro de una caja de VAV. Según el método para combinar el aire primario y el aire secundario, las cajas de VAV tienen dos tipos:.
(41) 33. (1) Cajas de VAV de inducción, y (2) Cajas de VAV accionadas por ventilador.. En el método de inducción, el aire primario arrastra al aire secundario al cual inducen por medio de dampers de inducción de una caja de VAV. Las cajas de VAV accionadas por ventilador utilizan un pequeño ventilador para mezclar el aire primario y el aire secundario. La cantidad de aire primario es controlada por el dámper del aire primario que es controlado por el termóstato del lugar. Las cajas de VAV accionadas por ventilador se diseñan en serie o en paralelo. Los diagramas esquemáticos de cada tipo se muestran en las Figuras 2.2 y 2.3. Otra característica del flujo de las cajas de VAV es la dependencia del flujo sobre la presión de suministro del ducto. Las cajas de VAV que se diseñan para suministrar la circulación de aire constante a la zona para una señal dada del termóstato a pesar de variar, que ejercen presión sobre la canalización contracorriente desde la caja de VAV son llamadas de presión - independiente. Las cajas de VAV que son sensibles a la presión del ducto de fuente se llaman de presión - dependiente.. Figura 2.2: Diagrama esquemático de la caja de VAV de inducción. (4).
(42) 34. Figura 2.3: Diagramas esquemáticos de la caja de VAV accionada por un ventilador en serie y paralelo. (4) En esta tesis, las cajas de VAV de presión - independientes serán asumidas para la simplificación del modelo. 2.2.METODOS DE CONTROL DE VOLUMEN DEL VENTILADOR7 Los métodos de control de volumen del ventilador en el sistema VAV son un factor importante para el consumo de la electricidad del ventilador, así que se introducen brevemente aquí. Hay varios métodos para controlar la presión y el volumen de entrega de los ventiladores para los usos del VAV (Chen y Demster, 1995; Haines y Wilson, 1994; Kreider y Rabl, 1994).. 7. Chen, S. y Demster, S., (1996). Sistemas de volumen de aire variable para la calidad del ambiente. McGraw-Hill.
(43) 35. . Un dámper de modulación en la descarga del ventilador. Un dámper simple en la salida puede acercarse para incrementar la resistencia y disminuir el flujo. Esto hace que suba la curva del ventilador y ahorre un poco de energía.. . Un puente desde la fuente para el retorno, con un dámper de modulación. Esto significa que el ventilador está funcionando a volumen constante todas las veces mientras que el volumen del sistema varía. Se obtiene un buen control pero no hay ahorros de energía.. . Dampers de la paleta de la entrada. Una cantidad pre-rotada y limitada de aire entra en la voluta del ventilador. Mientras que estos dampers modulan, cambian las características de funcionamiento del ventilador y se ahorra energía. Las veletas de admisión plantean una penalidad de energía a través de la resistencia añadida a la corriente de aire.. . Control electrónico de la velocidad. Se regula la velocidad del ventilador usando un control electrónico de la velocidad llamado impulsor de frecuencia variable (IFV), impulsor de velocidad variable (IVV), o inversor. Este dispositivo modula la energía que va al motor eléctrico de inducción de CA de modo que la velocidad del motor cambie en respuesta al cambio de la frecuencia de la energía producida por los impulsores electrónicos. Este método de control ahorra energía perceptiblemente puesto que el uso de la energía varía como el cubo de la velocidad, aunque hay algunas pérdidas en los circuitos eléctricos.. . Así, se recomienda utilizar el método de la modulación de IVV para los ahorros de energía del ventilador. Los componentes básicos y sus características más importantes de los sistemas VAV se describen tal como sigue.. 6.. Caja terminal del VAV: varía el volumen de aire que la atraviesa, basado en los requerimientos calentamiento/refrigeración de la zona.. 7.. Dispositivo de modulación del flujo del ventilador: el impulsor de velocidad variable sobre el motor, un dámper de entrada, un dámper de descarga, etc.. 8.. Sensor de la presión estática: para detectar y medir la presión terminal del ducto cerca del extremo del ducto para asegurar un flujo adecuado en la zona. El mantenimiento.
(44) 36. de la presión estática se logra controlando el dispositivo de modulación del flujo del ventilador. 9.. Ductos de distribución del aire: incluye el ducto de suministro principal, ramas y accesorios para la unión del ducto.. 10. Dampers automáticos o manuales: controlan la salida del aire, aire de recirculación, retorno de aire y el aire mezclado. 2.2.1.MÉTODOS DE DISEÑO DEL DUCTO Los métodos de diseño del conducto o ducto se presentan fundamentalmente en el manual ASHRAE (1997). Se presentan tres métodos: fricción pareja, recuperación estática, y el T método o método T. Como los métodos basados en la no optimización, el método de fricción pareja, son usados extensamente para sistemas de baja presión en la mayor parte de edificios y el método de recuperación estática es usado para sistemas muy grandes y de alta velocidad (Kreider y Rabl, 1994; Mcquiston y Parker, 1994). El método T, introducido por Tsal 1988, es el único método basado en la optimización, descrito en el manual ASHRAE de 1997. 2.2.2.MÉTODO DE LA FRICCIÓN PAREJA8 El principio del método de la fricción pareja es producir una pérdida constante de la presión por unidad de longitud para el sistema completo. El procedimiento generalmente es seleccionar la velocidad en el ducto principal adyacente al ventilador y entonces la relación conocida de la circulación de aire determina el tamaño del ducto y la perdida de presión por unidad de longitud. La misma pérdida de presión por unidad de longitud entonces se utiliza a través del sistema. Después del dimensionamiento inicial, la pérdida de la presión total de la carrera más larga es calculada incluyendo la pérdida de la presión dinámica de todos los accesorios y transiciones.. Como un híbrido del método de fricción pareja, el método de fricción pareja equilibrada es introducido en la Guía ASHRAE 1997 y la Nueva Guía ASHRAE 2105 en que se 8. ASHRAE, (1997). Manual ASHRAE – Diseño de ductos..
(45) 37. Enfoca en Operación Optima de Sistemas e Instalaciones . Después de que se decida la pérdida total de la presión, las secciones del ducto en la rama se vuelven a clasificar según el tamaño para balancear las pérdidas de la presión en cada unión. Un diseño bien equilibrado se puede producir con este acercamiento si todas las carreras del ventilador al difusor son de longitud casi igual. Sin embargo, la mayoría de los sistemas del conducto tienen una variedad de carreras del ducto que se extienden de largo a cortos rangos. Las carreras cortas tendrán que ser dampered, y pueden causar ruido considerable. Cuando el coste energético es alto y el coste instalado de la canalización es bajo, una baja relación de fricción de diseño es más económica que una relación de alta fricción. 2.2.3.MÉTODO DE RECUPERACION ESTÁTICA El método de la recuperación estática se basa en el requisito que la presión estática del sistema sigue siendo casi igual a través del sistema. Específicamente, los ductos se clasifican de modo que el aumento en la presión estática en una sección del ducto balancee exactamente la pérdida de la presión en la sección siguiente del ducto. El procedimiento es primero seleccionar una velocidad para el ducto unido al ventilador. Con la capacidad de la circulación de aire, el tamaño de este ducto principal se decide. El ducto que funciona es el que tiene la resistencia más grande del flujo, entonces se diseña, usando los accesorios y las disposiciones más eficientes posibles. Se asume una velocidad para la siguiente sección en la carrera y la recuperación de la presión estática se utiliza para superar las pérdidas de la fricción de la presión para esa sección. Este método es conveniente para sistemas de alta velocidad, sistemas de volumen constante que tienen carreras largas del ducto con muchos despegues. Las desventajas principales de este método son las velocidades muy bajas y los tamaños grandes del ducto que pueden resultar en el final de carreras largas. 2.2.4.EL METODO T El método T es un método basado en la optimización que reduce al mínimo el coste del ciclo vital (Tsal 1988). Este método está basado en la misma idea de la programación dinámica (Bellman 1957, Tsal y Chechik 1968). Se ha demostrado que los sistemas del ducto optimizados que usan el método T pueden dar lugar a costes entre el 12,2% y el 53,4% más bajos del ciclo vital sobre un sistema diseñado usando otros métodos (Tsal y.
(46) 38. Behls 1986). La meta de la optimización del ducto es determinar tamaños del ducto según las pérdidas óptimas de la presión y seleccionar un ventilador según la presión óptima del ventilador que reduce al mínimo los gastos de operación. La información sobre los gastos de operación para el sistema de HVAC se describe en el Manual HVAC de ASHRAE (1995). El cálculo de los costes anuales comprende el coste inicial, del análisis del período, del tipo de interés, y de otros costes periódicos. Los gastos de explotación o gastos de operación, incluyen el coste energético, el coste de mantenimiento, el trabajo de operación, y el coste de la escalada. Los gastos de operación y de posesión se juntan para desarrollar un análisis económico. El propósito de la optimización del sistema del ducto es comparar el costo del ciclo vital del sistema para diversos tamaños del ducto y dimensionar la presión total. Por consiguiente, muchos de los elementos constantes antedichos se pueden excluir de los costos del sistema y solamente el coste inicial, el coste energético, el período, la relación de la escalada y el tipo de interés se consideran para la optimización (Tsal y Behls 1990). El coste del ciclo vital se da por:. E E p PWEF ES. (2.1). Donde: E es el coste del ciclo, $ E P es el coste de la energía anual, $. ES es el coste inicial, $. PWEF es el valor actual del factor de intensificación, sin dimensiones. El coste de la energía eléctrica se determina por: EP Qven. ECY Ed Pven 103 g f g e. Donde: Qven es el caudal de la circulación de aire, m3/s (constante durante todo el año). (2.2).
Figure



+7






Documento similar