UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
Facultad de Sistemas Mercantiles
Carrera de Sistemas
Tesis de Grado Previo a la Obtención del Título de Ingeniera en
Sistemas e Informática
Tema:
Sistema de monitoreo, vigilancia y control mediante el uso de
drones para los campos agrícolas– Tulcán
.
Autora: Moreno Vizcaíno Jeniffer Katty
Asesor: Freed Carrera
II
Certificación del Asesor
En mi calidad de Asesor de la Tesis de Grado, previo a la obtención del título de Ingeniero en Sistemas e Informática; Certifico que la señorita Moreno Vizcaíno Jeniffer Katty, elaboro su trabajo de grado sobre el tema: Sistema de monitoreo, vigilancia y control mediante el uso de drones para los campos agrícolas de la ciudad de Tulcán, bajo los lineamientos académicos y de investigación de UNIANDES.
La implementación del Sistema de monitoreo, vigilancia y control mediante el uso de drones para los campos agrícolas de la ciudad de Tulcán propuesto, cuya característica principal es brindar herramientas tecnológicas para las personas del sector agrícola ganadero. La importancia de este sistema radica en la investigación tecnológica dentro del área de la automatización y control, además de aportar con conocimientos adquiridos a los estudiantes de UNIANDES Tulcán.
Como asesor de tesis apruebo la respectiva tesis de grado, para que sea sometida a la revisión de lectores y defensa de la misma, por parte de jurado calificador que se designe.
Atentamente,
III
Declaración de Autoría de la Tesis
Yo, Moreno Vizcaíno Jeniffer Katty con cédula de identidad N°. 040167059-1, egresada de la facultad de sistemas mercantiles, carrera de sistemas e informática, certifico y doy fe que la presente tesis de grado con el tema: Sistema de monitoreo, vigilancia y control mediante el uso de drones para los campos agrícolas de la ciudad de Tulcán, es de mi autoría. Además doy potestad a la universidad para que emplee el trabajo de culminación de estudio como bibliografía para futuras investigaciones relacionadas con el tema planteado.
Atentamente,
Katty Moreno
IV
Dedicatoria
Este esfuerzo dedico a Dios quién supo guiarme por el buen camino, darme
fuerzas para seguir adelante y no desmayar en los problemas,
enseñándome a encarar las adversidades sin perder nunca la dignidad ni
desfallecer en el intento. Además de su infinita bondad y amor.
A mi MADRE, por ser la amiga y compañera que me ha ayudado a crecer,
por ser la persona que me ha acompañado durante todo mi trayecto
estudiantil y de vida, por sus consejos, comprensión, ayudándome en los
momentos difíciles, por ser el pilar fundamental en todo lo que soy, por la
motivación constante que me ha permitido ser una persona de bien, pero
más que nada, por su amor corrigiendo mis faltas y celebrando mis
triunfos.
A mis ABUELITOS, por saberme apoyar durante toda mi vida, sus
consejos y sus experiencias en la vida me han llevado a que pueda
culminar una meta más en trayecto de mi vida por sus esfuerzos de sacar a
V
Agradecimiento
Mi eterna gratitud para la Universidad Regional Autónoma de los Andes
UNIANDES y por su intermedio a todos mis Docentes, que con su labor
altamente generosa y entusiasta impartieron valiosos conocimientos para
mi formación profesional, integral y armónica.
A toda mi familia por darme su apoyo incondicional para que pueda ser
una profesional, gracias a ellos que han sido mi inspiración para no
VI
Índice General
ÍTEM CONTENIDO PÁGINA
Preliminares
Certificación del Asesor
Declaración de Autoría de la Tesis Dedicatoria Agradecimiento Índice General Resumen Ejecutivo Executive Summary Introducción Antecedentes Investigativos Planteamiento del Problema Formulación del Problema Delimitación del Problema
Objeto de Investigación y Campo de Acción Objeto de Estudio
Campo de Acción Línea de Investigación Objetivos
Objetivo General Objetivos Específicos Idea a Defender Justificación del tema
Métodos, Técnicas y Herramientas de Investigación Metodología a Emplear
VII 1.1. 1.2. 1.2.1. 1.2.2. 1.2.2.1. 1.2.2.2. 1.2.2.3. 1.3. 1.4. 2.1. 2.2. 2.2.1. 2.2.2. 2.3. 2.3.1. 2.3.2. 2.4. 2.5. 2.6. 2.7.
CAPÍTULO I. MARCO TEÓRICO
Origen y Evolución del Sistema de automatización y control aéreos mediante Inteligencia artificial
Análisis de las distintas posiciones teóricas de sistemas de monitoreo y vigilancia aérea
Informática Dron
Vigilancia y privacidad Vigilancia de infraestructuras Imágenes extremadamente nítidas
Valoración crítica de los conceptos principales de las distintas posiciones teóricas sobre dispositivos aéreos de monitoreo y vigilancia
Conclusiones Parciales del Capítulo I
CAPÍTULO II. MARCO METODOLÓGICO
Caracterización de la situación actual del sector agrícola de la ciudad de Tulcán
Descripción del procedimiento metodológico para el desarrollo de la investigación
Modalidad de la Investigación Tipos de investigación
Métodos, técnicas e instrumentos Métodos
Técnicas
Población y Muestra
Análisis e interpretación de datos
Metodología de la construcción del dispositivo de monitoreo y vigilancia aérea
Conclusiones parciales del capítulo II
VIII 3.1. 3.2. 3.2.3. 3.2.3.1. 3.2.3.2. 3.3. 3.3.1. 3.3.1.2. 3.3.1.2.1. 3.3.1.2.2. 3.3.2. 3.3.2.1. 3.3.3. 3.3.3.1. 3.3.3.2. 3.3.3.3. 3.3.3.3.1. 3.3.3.3.2. 3.3.4. 3.3.4.1. 3.3.4.2. 3.3.4.3. 3.3.4.4. 3.4. 3.5.
CAPÍTULO III. DESARROLLO DE LA PROPUESTA
Título de la Propuesta Propuesta del Investigador Objetivos
Objetivo General Objetivos Específicos
Caracterización de la Propuesta
Análisis y Especificaciones Técnicas del Hardware Utilizado, Phantom Dji
Componentes de Phantom Dji Hardware y Software
Descripción del Sistema
Diseño de la estructura general del dispositivo aéreo de vigilancia y monitoreo
Proceso de diseño del dispositivo Construcción del dispositivo Estructura General del dispositivo Programación
Herramientas básicas
Herramientas avanzadas de control Herramientas de control de estabilidad
Pruebas Primera Prueba – Sensor de Giroscopio Resultados
Segunda Prueba – GPS Resultados
Validación de la Propuesta
IX
RESUMEN EJECUTIVO
En el presente trabajo de investigación se estudió los sistemas de monitoreo y vigilancia aérea para el sector agrícola de la ciudad de Tulcán.
La presente investigación contempla 3 capítulos, en el primer capítulo se desarrolla el marco teórico que consiste en aplicar los conceptos, leyes y etapas esenciales como material de consulta en el desarrollo del conocimiento científico para contribuir a la solución del problema planteado, realizando una revisión bibliográfica sobre el monitoreo y vigilancia aérea, esta revisión se realizó con el objetivo de mejorar la vigilancia de los terrenos del sector rural de la ciudad de Tulcán.
En el segundo capítulo se desarrolla el marco metodológico que consiste en llevar la investigación de manera práctica objetiva y directamente de la fuente, para lo cual se ha implementado una investigación de campo y explicativa, con la aplicación de los métodos técnicas y herramientas de la investigación, la aplicación de los métodos empíricos y teóricos y las técnicas de Investigación como la entrevista y la encuesta a las personas que trabajan en las fincas del sector rural de la ciudad de Tulcán, para finalmente realizar el análisis y la interpretación de los datos obtenidos que constituyen un componente fundamental en el desarrollo del trabajo investigativo.
En el tercer capítulo se lleva a cabo el desarrollo de la propuesta con lo cual se concluye el trabajo investigativo que consiste en implementar un sistema de drones para el monitoreo y vigilancia del sector agrícola en la ciudad de Tulcán.
X
EXECUTIVE SUMMARY
In the present research monitoring systems and aerial surveillance for the breeds sector of the city of Tulcán was studied.
This research includes 3 chapters, the first chapter the theoretical framework of applying the concepts, laws and essential steps as reference material in the development of scientific knowledge to contribute to the solution of the problem develops, conducting a literature review on monitoring and aerial surveillance, this review was conducted with the aim of improving the monitoring of land in the rural sector of the city of Tulcán.
In the second chapter the methodological framework which is to bring the research objective and practical way directly from the source, for which we have implemented a field research and explanatory, with the application of technical methods and research tools developed The application of empirical and theoretical methods and research techniques such as interviews and survey people working on farms in the rural sector of the city of Tulcán, to finally perform the analysis and interpretation of the data that are a key component in the development of investigative work.
In the third chapter takes place the development of the proposal with which the research work is to implement a system of drones for monitoring and surveillance of agricultural and livestock sector in the city of Tulcán is concluded.
1
INTRODUCCIÓN
Antecedentes Investigativos.
La era tecnológica actual ha sido partícipe de la creación de nuevos dispositivos electrónicos que periten satisfacer y resolver problemas sociales de distintas índoles, en el presente proyecto de tesis se va a analizar un nuevo dispositivo que actualmente se encuentra en desarrollo, este dispositivo se conoce como Drones, el cual es un dispositivo aéreo utilizado para vigilancia ya que contiene una cámara de alta definición que permite grabar video de los lugares por donde el dispositivo esté.
Una de las causas para iniciar con el estudio de esta tecnología es el aporte de conocimientos teóricos y prácticos a los estudiantes de la Universidad en la ciudad de Tulcán.
En el medio social, específicamente en la ciudad de Tulcán se puede observar que no existen investigaciones en el área del monitoreo y vigilancia aérea, y a pesar de que algunas personas y empresas poseen estos dispositivos, no los utilizan adecuadamente más solo los ponen a prueba con mando a distancia (control remoto) y la finalidad que le dan es para entretenimiento.
Los drones son dispositivos electrónicos programables que pueden ejecutar acciones de vigilancia mediante coordenadas GPS; es decir, se los puede enviar a vigilar y grabar video a largas distancias sin la necesidad de utilizar un mando a distancia, para esto se requiere de algoritmos que permitan establecer coordenadas geográficas para que el dispositivo por sí solo se dirija hacia diversos puntos y regrese con información para su respectivo análisis.
Planteamiento del Problema
En la ciudad de Tulcán, especialmente en el área agrícola se ha evidenciado que es conveniente realizar acciones de monitoreo puesto que en la actualidad se realiza un monitoreo terrestre mediante la percepción visual de las personas; este monitoreo terrestre presenta una perspectiva cerrada a lo que el ojo humano alcanza a visualizar, pero es también conveniente la percepción aérea ya que se presente una visión global del campo a monitorear.
2
grabación de todo el terreno y volviendo al mismo punto de partida, esto permite que el dispositivo realice varios recorridos al día sin la necesidad de la presencia humana en los terrenos monitoreados.
Esta nueva área tecnológica brinda a investigadores y aficionados un vasto y variado campo de trabajo, lleno de objetivos y en estado inicial de desarrollo.
El dron es un autómata programable que nació como solución al problema de monitoreo y vigilancia. Por lo tanto se puede decir que un dron es un aparato electrónico que sustituye los circuitos auxiliares o de mando de los sistemas automáticos. A este dispositivo se puede conectar sensores de todo tipo para verificar otro tipo de variables como temperatura, humedad, etc.
Formulación del Problema.
¿Cómo mejorar el monitoreo y vigilancia en el sector agrícola de la ciudad de Tulcán?
Delimitación del Problema.
Lugar.
El lugar en donde se desarrolló el presente trabajo investigativo, es el sector agrícola en las fincas ubicadas en el sector rural de la ciudad de Tulcán.
Tiempo.
El presente proceso investigativo se lo realizó en el período comprendido entre Febrero de 2015 hasta Agosto de 2015, durante este tiempo se profundizó en el campo del monitoreo y vigilancia aérea mediante el uso de drones.
Objeto de Investigación y Campo de Acción
Objeto de Estudio.
3
Campo de Acción.
Robótica.
Línea de Investigación.
Automatización y Control.
Objetivos.
Objetivo General
Implementar el sistema de drones para el mejoramiento del monitoreo y vigilancia del sector agrícola en la ciudad de Tulcán.
Objetivos Específicos
Sistematizar la información sobre drones, monitoreo y vigilancia del sector agrícola.
Diagnosticar la situación actual del monitoreo y vigilancia en el sector agrícola de la ciudad de Tulcán.
Determinar los elementos constitutivos del sistema de drones para el monitoreo y vigilancia del sector agrícola de Tulcán.
Validar la propuesta por la vía de expertos.
Idea a Defender
Con la implementación de dispositivos de vigilancia aérea se contribuiye al perfeccionamiento del monitoreo del sector agrícola de la ciudad de Tulcán, permitiendo así el uso de nuevas tecnologías para la implementación de nuevas técnicas de vigilancia, además de aportar con conocimientos adquiridos a los estudiantes de la Universidad.
Justificación del Tema.
4
La propuesta de esta investigación está dirigida a los sectores rurales de producción en la ciudad de Tulcán, ya que su desarrollo permitirá el aporte de conocimientos en configuración y uso de nuevas tecnologías de monitoreo aéreo que contribuya tanto al sector agrícola como también a los estudiantes de la carrera de Sistemas en Uniandes Tulcán.
Es necesario aplicar nuevas tecnologías que contribuyan con el desarrollo de proyectos en los sectores tanto urbanos como rurales de la ciudad de Tulcán; la tecnología ofrece nuevos recursos que dan beneficio en varias tareas que son complicadas para el hombre, mediante la tecnología se pueden realizar diversas tareas que ayuden al beneficio común de la ciudadanía en general.
Métodos, Técnicas y Herramientas de Investigación.
Metodología a Emplear
Los métodos que se van a utilizar en el desarrollo de la presente tesis son Empíricos y Teóricos.
Métodos Empíricos
Es un modelo de investigación científica, que se basa en la experimentación y la lógica empírica, que junto a la observación de fenómenos y su análisis estadístico, es el más usado en el campo de las ciencias sociales y en las ciencias naturales.
Los métodos a utilizarse en la elaboración de la presente tesis son:
Observación Científica
Porque es un elemento fundamental en todo proceso investigativo, para obtener el mayor número de información, observando la estructura, funcionamiento; clasificando y resumiendo los datos, ya que gran parte del conocimiento que constituye la ciencia ha sido lograda mediante la observación.
Análisis Documental
5 Validación por la Vía de Expertos
Este método es aplicable en la tesis porque permite consultar a un conjunto de expertos para validar la propuesta sustentada en sus conocimientos, investigaciones, experiencia, estudios bibliográficos, etc. Aquí se da la posibilidad a los expertos de analizar el tema con tiempo sobre todo si no hay posibilidades de que lo hagan de manera conjunta.
Métodos Teóricos
A través de los métodos teóricos se logra descubrir la esencia del objeto investigado y sus interrelaciones, ya que no se puede llegar a ella mediante la percepción. Por ello se apoya básicamente en los procesos de abstracción, análisis, síntesis, inducción y deducción.
Entre los métodos teóricos que se destacan en la realización de la presente tesis son:
Método Analítico – Sintético
Este método implica el análisis y la síntesis; es decir, la separación de un todo en sus partes o en sus elementos constitutivos, y la segunda implica la unión de elementos para formar un todo. En la tesis de grado se optará por descomponer y distinguir los elementos del todo y revisar ordenadamente cada uno de ellos por separado para descubrir los distintos elementos que lo componen como las causas y los efectos.
Método Inductivo – Deductivo
En términos muy generales, consiste en establecer enunciados universales ciertos a partir de la experiencia; esto es, ascender lógicamente a través del conocimiento científico, desde la observación de los fenómenos o hechos de la realidad que la ley universal contiene. Es por eso que este método será utilizable ya que hace parte de un marco general de referencia y se va hacia un caso en particular.
Histórico - Lógico
6
abstracciones. Lo histórico, con referencia a lo lógico, es lo primario; la lógica refleja los momentos y consideraciones fundamentales de la historia.
Método Sistémico
Es importante utilizar este método porque permite relacionar hechos aparentemente aislados y se formula una teoría que unifica los diversos elementos.
Técnicas de Investigación
Encuesta
Instrumentos De Investigación
Para la Encuesta se aplica, el cuestionario o test.
Aporte Teórico, Significación Práctica y Novedad.
Aporte Teórico
El aporte teórico de la presente tesis de grado es la configuración e implementación de un dispositivo de monitoreo que realice tareas de vigilancia en el sector agrícola, con los diferentes elementos y conceptos que componen el dron por medio de la manipulación, automatización, control, electrónica y su respectivo manual de información y guía para el usuario.
Significación Práctica
La robótica de dispositivos aéreos en la actualidad es muy necesaria para la automatización de procesos presentes en la vida cotidiana. Los dispositivos aéreos han abierto una nueva etapa en los procesos de mecanización y automatización de los procesos de vigilancia, ya que gracias a estos dispositivos se ha podido sustituir la presencia humana en sectores de difícil acceso, por dispositivos de uso concreto dotados de varios grados de libertad que son capaces de moverse sobre cualquier lugar para capturar imágenes de cualquier parte y desde cualquier ángulo de enfoque.
7
Novedad
8
CAPÍTULO I. MARCO TEÓRICO
1.1. Origen y Evolución del Sistema de automatización y control para monitoreo y
vigilancia aérea
En los últimos años se observó un notable aumento de la investigación en dispositivos de monitoreo y vigilancia aérea en todo el mundo en un intento de aplicar nuevas tecnologías inalámbricas, ya experimentadas en los múltiples campos de la robótica móvil, al campo específico de la Vigilancia.
De esta manera, y a pesar del tiempo transcurrido y los esfuerzos dedicados, no se ha cubierto aún la falencia que existente entre los laboratorios de investigación y el usuario final que para el presente caso es el sector agrícola y ganadero. No obstante, tanto las realidades actuales como las potenciales vías de desarrollo que las diversas tecnologías aplicables prometen un futuro esperanzador al colectivo de los diferentes sectores. Sólo falta encontrar aquél aspecto de entre los ya probados que permita activar el interés de la industria en este campo.
El propósito del documento es presentar y discutir las posibilidades más destacadas en un aspecto tan interesante como la vigilancia y monitoreo con vehículos aéreos. Para ello se partirá de las experiencias de distintos grupos de trabajo y, a continuación, se cruzarán estas experiencias con los datos disponibles obtenidos de procesos de vigilancia. Se espera que las conclusiones extraídas finalmente permitan interesar tanto a los potenciales usuarios como a los fabricantes de equipos.
1.2. Análisis de las distintas posiciones teóricas de sistemas de monitoreo y
vigilancia aérea
Para la elaboración de la propuesta de la tesis de grado, es necesario basarse en los siguientes fundamentos teóricos:
1.2.1. Monitoreo y vigilancia
La vigilancia por sistema es el proceso de monitoreo de personas, objetos o procesos dentro de sistemas para la conformidad de normas esperadas o deseadas en sistemas confiables para control de seguridad o social. La vigilancia clínica se refiere al monitoreo de enfermedades o indicadores públicos relacionados con la salud.
9
no sólo la observación visual. Sin embargo, el "ojo en el cielo" que todo lo ve es aún el icono de la vigilancia. Para la vigilancia en muchas ciudades modernas y edificios se suelen emplear circuitos cerrados de televisión. Si bien la vigilancia puede ser una herramienta útil para las fuerzas y empresas de seguridad, mucha gente se muestra preocupada por el tema de la pérdida de privacidad
1.2.2. Dron
Los drones son dispositivos de vigilancia aérea, aunque hay VANT de uso civil, también son usados en aplicaciones militares, donde son denominados vehículo aéreo de combate no tripulado UCAV por su nombre en inglés. Para distinguir los VANT de los misiles, un VANT se define como un vehículo sin tripulación reutilizable, capaz de mantener un nivel de vuelo controlado y sostenido, y propulsado por un motor de explosión o de reacción. Por tanto, los misiles de crucero no son considerados VANT porque, como la mayoría de los misiles, el propio vehículo es un arma que no se puede reutilizar, a pesar de que también es no tripulado y en algunos casos guiado remotamente.
Hay una amplia variedad de formas, tamaños, configuraciones y características en el diseño de los VANT. Históricamente los VANT eran simplemente aviones pilotados remotamente (en inglés: drones), pero cada vez más se está empleando el control autónomo de los VANT. En este sentido se han creado dos variantes: algunos son controlados desde una ubicación remota, y otros vuelan de forma autónoma sobre la base de planes de vuelo preprogramados usando sistemas más complejos de automatización dinámica. Cabe destacar que las aeronaves controladas remotamente en realidad no califican para ser llamadas como VANT, ya que los vehículos aéreos pilotados remotamente (o por control remoto) se conocen como Aeronaves Radiocontroladas o Aeronaves R/C; esto debido a que, precisamente, los VANT son también sistemas autónomos que pueden operar sin intervención humana alguna durante su funcionamiento en la misión a la que se haya encomendado, es decir, pueden despegar, volar y aterrizar automáticamente.
10
susceptibles de provocar daños colaterales y/o identificar objetivos erróneos, como con otros tipos de arma. Los VANT también son utilizados en un pequeño pero creciente número de aplicaciones civiles, como en labores de lucha contra incendios o seguridad civil, como la vigilancia de los oleoductos. Los vehículos aéreos no tripulados suelen ser preferidos para misiones que son demasiado "aburridas, sucias o peligrosas" para los aviones tripulados.
El ejemplo más antiguo fue desarrollado después de la primera guerra mundial, y se emplearon durante la segunda guerra mundial para entrenar a los operarios de los cañones antiaéreos. Sin embargo, no es hasta poco más que a finales del siglo XX cuando operan los VANT mediante radio control con todas las características de autonomía.
Los VANT han demostrado sobradamente en diferentes escenarios y, especialmente en la Guerra del Golfo y en la Guerra de Bosnia, el gran potencial que tienen. En cuanto a la obtención, manejo y transmisión de la información, gracias a la aplicación de nuevas técnicas de protección de la misma resulta posible conseguir comunicaciones más seguras, más difíciles de detectar e interferir. (Roberto Montoya, 2014).
Los dispositivos aéreos no tripulados se utilizaron por primera vez en la Segunda Guerra Mundial; es evidente que luego del proceso que se presenta en una guerra, los países crean conveniente generar nuevas tecnologías tanto en defensa como en ataque, por lo que después de una guerra la tecnología crece a pasos agigantados.
1.2.2.1. Vigilancia y privacidad.
11
Yugoslavia sería la última en la que se usarían aviones tripulados y no parece que las predicciones estuvieran muy equivocadas.
Algunas estimaciones hablan de que en los próximos años se fabricarán unos 35.000 drones en el mundo, siendo este uno de los segmentos de mayor crecimiento en la industria aeronáutica. En estos momentos, dos tercios de los mismos se producen en Estados Unidos e Israel y menos del diez por ciento en Europa. Y, cada vez más, estos aviones no tripulados se usan fuera de las zonas de conflicto para usos policiales, civiles y comerciales, lo que, indudablemente, suscita cuestiones y preocupaciones para la privacidad de las personas.
Existen diferentes tipos de UAV que, habitualmente, se suelen distribuir en tres grandes categorías, dependiendo de su tamaño, de la carga que pueden transportar y de su autonomía de vuelo: micro y mini UAV, tácticos y estratégicos. Los micro y mini UAV son los más pequeños; pueden pesar entre 100 gramos y 30 kilos y vuelan a baja altitud (por debajo de 300 metros). Su diseño está optimizado para moverse en las calles de una ciudad o, incluso, en el interior de edificios y suelen ir equipados con dispositivos de captura y grabación de audio y vídeo aunque también pueden montar cámaras de infrarrojos, sensores térmicos u otro tipo de equipamiento. Además, en un paso más de miniaturización, se están probando los conocidos como “nano drones” que tienen el tamaño de un insecto.
12
Finalmente, los UAV estratégicos (High Altitude Long Endurance -HALE-) son grandes y pesadas plataformas que pueden llegar hasta las doce toneladas y volar a una altitud máxima de 20.000 metros. Aunque su uso sigue siendo predominantemente militar también se utilizan en otros entornos como realización de mapas y observaciones atmosféricas y terrestres (uno de los más conocidos es el “Helios”, operado por la NASA y que funciona con energía solar).En cualquier caso, no nos vamos a ocupar de las aplicaciones y usos militares de los drones y nos centraremos en su utilización fuera de los teatros de guerra o de las operaciones militares. (Javier Jordán, 2014).
Los dispositivos aéreos no tripulados pueden ser de uso civil y militar, los más pequeños presentan corto alcance y pueden elevarse a alturas no superiores a 300m. Como dispositivos de uso civil pueden capturar imágenes, audio y otro tipo de variables como temperatura, humedad, etc. Además algunos de estos dispositivos cuentan con GPS, lo cual les permite moverse de un lugar a otro sin necesidad de un control remoto.
Los Drones de uso militar son de mayor tamaño y pueden alcanzar grandes distancias; los más grandes pueden transportar objetos grandes y pesados como bombas, misiles, etc.
1.2.2.2. Vigilancia de infraestructuras
13 Fuente: Fotografía de un Dron en proceso de vuelo
Estos usos policiales, civiles y comerciales llevan aparejado que los UAV ya no solo vuelan en zonas de guerra o aisladas, sino que lo hacen en lugares en los que hay presencia humana, ya sea incidental o como objetivo directo de la acción de los drones y, por ello, su utilización plantea desde el origen la forma en que la misma puede afectar o invadir el derecho fundamental a la protección de datos de las personas. Hasta ahora, la mayor preocupación por parte de las autoridades para autorizar el uso de UAV ha sido la seguridad, tanto del espacio aéreo como de las personas sobre las que vuelan los drones, pues hemos de tener en cuenta que en entornos policiales o de control de la seguridad pública, estos aviones no tripulados pueden tener la posibilidad de cargar botes de humo, lanzadores de pelotas de goma o armas de fuego. O, en cualquier caso, simplemente, tener un accidente que cause daños a personas, casas, vehículos, árboles o mobiliario urbano.
Pero ésta limitada perspectiva está empezando a cambiar: en mayo de 2012, por primera vez se regulaba el uso de UAV en Alemania a través de la Ley de Aviación (solo se autorizaban drones de menos de veinticinco kilos y que no desaparecieran de la línea de visión del operador), pero en la misma no se incluía ninguna previsión sobre protección de datos personales o de salvaguardia de la privacidad.
14
de Protección de Datos ya ha anunciado que supervisará de cerca la evolución de la aplicación de la ley. (Javier Jordán, 2014).
El principal objetivo de estos dispositivos es la vigilancia puesto que desde el aire se puede cubrir gran cantidad de terreno, no obstante en ciertos casos se puede violentar el derecho a la privacidad de las personas, entonces es importante conocer el uso de estos dispositivos sin intervenir en la vida privada de otras personas.
1.2.2.3. Imágenes extremadamente nítidas
Las implicaciones para la privacidad de las personas en el uso de drones son obvias. Para llevar a cabo sus funciones de observación, supervisión y vigilancia, todos los UAV comerciales o policiales van equipados con cámaras de televisión que producen imágenes extremadamente nítidas y, en muchos casos, también cuentan con sensibles equipos de grabación de sonido e, incluso, con cámaras de infrarrojos o sistemas de interceptación de las comunicaciones móviles. Además, también pueden ir equipados con dispositivos que “ven dentro de los muros” como detectores térmicos que tienen la posibilidad de ser utilizados para monitorizar personas en sus casas o lugares de trabajo.
A este respecto, el Tribunal Supremo de los Estados Unidos, ya en 2001, en el caso “Kyllo v United States”, sostuvo que el uso de un dispositivo de imágenes termales desde un punto de vigilancia público para monitorizar las radiaciones de calor de la casa de una persona constituía un “registro” en los términos de la constitución de aquel país y, por lo tanto, requería una orden judicial para poder llevarse a cabo. Y ello por contraposición a otros casos en los que dicha autorización judicial no se había considerado necesaria ya que la vigilancia se había llevado a cabo, por ejemplo, utilizando cámaras para filmar el patio trasero de una vivienda para detectar plantaciones de marihuana, puesto que las “expectativas de privacidad” (concepto angular en la doctrina americana y anglosajona en general) eran completamente diferentes.
15
real lo que hace posible sin demasiadas complicaciones monitorizar y seguir individuos basándose en determinados parámetros tales como altura, edad, sexo o raza, con las implicaciones para la privacidad y los potenciales riesgos de discriminación que conlleva, por no mencionar los riesgos de posibles falsos positivos en la identificación de las personas.
Uno de los aspectos más importantes del uso de drones es su invisibilidad. Un pequeño avión no tripulado volando a cientos o miles de metros de altitud pasa completamente desapercibido y sus cámaras y dispositivos de grabación y rastreo pueden filmar y fotografiar prácticamente cualquier cosa y a cualquier persona sin que nadie sea consciente de ello. Por este motivo, el potencial para el abuso de esta tecnología es tremendo y, actualmente, desconocido. Podría ser utilizado por criminales, voyeurs o personas sin escrúpulos para fisgonear dentro de los domicilios de sus víctimas sin que éstas tuvieran ni la más mínima indicación de que estaban siendo sometidos a dicha vigilancia.
Otro aspecto muy relevante, que ha sido puesto de manifiesto en un trabajo de Todd Humphrey, profesor de la Universidad de Texas, son los posibles problemas de seguridad derivados de la capacidad de interferir con sus sistemas de guiado mediante la falsificación de las señales del sistema GPS utilizado para este propósito: el Laboratorio de Radionavegación de la Universidad de Texas, a petición del Departamento de Seguridad Nacional (DHS) del Gobierno de los Estados Unidos, consiguió, desde una distancia de unos 800 metros, tomar el control de un UAV y estrellarlo en el desierto.
16
Por su parte, la Government Accountability Office estadounidense reconoció, en un informe solicitado por el Congreso de los EEUU, que existían preocupaciones sobre la privacidad derivadas del uso de drones, incluido “el potencial para el incremento de la cantidad de vigilancia por parte del gobierno usando tecnologías ubicadas en los UAV, la recogida y uso de tales datos, y las potenciales violaciones de la Cuarta Enmienda constitucional de protección contra los registros y las detenciones arbitrarias”. (Juan Carlos Losada, 2014).
Para una mejor calidad de imagen y video, se ha optado por dotar a estos dispositivos de cámaras de alta definición, y mediante un control remoto de largo alcance se puede observar la imagen emitida por la cámara, por lo que se puede manipular el dispositivo a corto alcance pero de mejor forma.
1.3 Valoración crítica de los conceptos principales de las distintas posiciones
teóricas sobre dispositivos aéreos de monitoreo y vigilancia.
La configuración y programación de dispositivos se ha convertido en una de las herramientas educativas donde los estudiantes ponen en práctica los conceptos adquiridos, así mismo impulsa a los alumnos adquirir y desarrollar nuevos conocimiento en las disciplinas que convergen la configuración y programación de este tipo de dispositivos.
El objetivo del proyecto de tesis es hacer un estudio sobre la implementación de dispositivos de vigilancia aérea no tripulados, utilizando estrategias integradoras para la enseñanza y aprendizaje de las diferentes ciencias que intervienen para que vaya acorde a los procesos sociales y tecnológicos que permitan un desarrollo equitativo y contribuya en la generación de ambientes de aprendizaje basados fundamentalmente en el trabajo de proyectos en donde los estudiantes desarrollan su creatividad e ideas para resolver problemas, con el estudio y manipulación de un dispositivo aéreo no tripulado para vigilancia y monitoreo se genera más conocimiento que estimule la crítica constructiva y análisis, e integre conocimiento innovador con el fin de crear tecnología propia en el desarrollo del sistemas.
17
aérea; de esta manera se permitirá dar conocimientos de este tipo de dispositivos y sus diferentes usos en el sector rural de la ciudad de Tulcán.
1.4. Conclusiones Parciales del Capítulo I.
En este capítulo se revisa el origen y evolución de los procesos informáticos lo cual permite tener el aspecto más importante de la propuesta y permite dar una solución directa del problema, a más de eso se analizan los diferentes temas que se relacionan con el problema a investigarse.
En cuanto a la conceptualización teórica de algunos términos que son importantes en la construcción del presente proyecto de tesis, se puede decir que la configuración y programación del dispositivo juega un rol muy importante, dado el carácter polivalente y multidisciplinario, hace uso de todos los recursos de vanguardia de otras ciencias afines lo que puede ayudar en el desarrollo e implantación de una nueva cultura tecnológica en todos los países, permitiéndoles el entendimiento, mejoramiento y desarrollo de sus propias tecnologías, también crear las condiciones de apropiación de conocimientos y permitir su transferencia en diferentes campos del conocimiento.
18
CAPÍTULO II. MARCO METODOLÓGICO
2.1 Caracterización de la situación actual del sector agrícola de la ciudad de
Tulcán
En la Universidad Regional Autónoma de los Andes Uniandes sede Tulcán se están desarrollando proyectos tecnológicos de gran amplitud puesto que se ha manejado tecnología actual que deja excelentes precedentes, en el área de vigilancia y monitoreo mediante dispositivos aéreos aún no existen investigaciones; por tal motivo en el presente proyecto de investigación se profundizará acerca de todo lo referente a este tipo de dispositivos, sus alcances y limitaciones con el fin de generar nuevos parámetros investigativos para la creación de nuevos proyectos tecnológico científicos posteriores de calidad. Esto permite generar nuevas fortalezas tanto para docentes como para estudiantes para que los procesos de formación profesional del estudiante estén acorde con los avances científicos, tecnológicos, de investigación en vínculo permanente con los sectores sociales y productivos.
2.2 Descripción del procedimiento metodológico para el desarrollo de la
investigación.
2.2.1 Modalidad de la Investigación
Considerando la naturaleza y el área que abarca este proyecto; “Dispositivos aéreos no tripulados para el monitoreo y vigilancia del sector agrícola en la ciudad de Tulcán”, se eligió un entorno cualitativo y cuantitativo debido a que se lo realizó por medio de entrevistas y encuestas a las personas dedicadas a la agricultura y ganadería en la ciudad de Tulcán.
El paradigma cuantitativo se lo utiliza por llevar a cabo una investigación de campo, fundamentada en encuestas o entrevistas, las mismas que son aplicadas a una muestra debidamente seleccionada de la población motivo de estudio, para lo cual se tabulan los datos en forma numérica y se presentan en gráficas estadísticos, estos instrumentos han sido aplicados a los agricultores y ganaderos de la ciudad de Tulcán.
19
2.2.2 Tipos de investigación
Los tipos de investigación empleados para el desarrollo de este trabajo de grado son:
Investigación Aplicada. Este tipo de investigación integró la teoría con la práctica para dar una solución adecuada al problema, como es el monitoreo y vigilancia del sector agrícola en la ciudad de Tulcán.
Investigación de Campo. Se desarrolla en el sector agrícola de la ciudad de Tulcán con la finalidad de recopilar datos a través de encuestas.
Investigación Bibliográfica. Porque se realizó un estudio en libros y en internet.
Investigación Descriptiva. Porque se hace el estudio y la descripción de las dos variables: Software para la automatización – monitoreo y vigilancia del sector agrícola en la ciudad de Tulcán.
Investigación Correlacional. Por cuanto tiene un grado de incidencia la variable independiente sobre la variable dependiente, es decir el: Dispositivos de vigilancia aérea – monitoreo, y mejorar el servicio de transporte a los usuario mediante una red móvil en la cuidad de Tulcán.
2.3 Métodos, técnicas e instrumentos.
2.3.1 Métodos
Métodos teóricos.
Método analítico-sintético. Se utiliza para analizar la elaboración de la encuesta y en el
marco teórico porque nos permite ir de un todo a sus partes, y la síntesis se la aplica en la propuesta porque nos permite ir de las partes al todo.
Método inductivo-deductivo. Se lo utiliza en planteamientos generales para inducir
conocimientos específicos.
Método Histórico – Lógico. Porque se hace un estudio de los antecedentes de la vigilancia aérea, así como se clasifica en etapas el marco teórico.
Método sistémico. Se lo va a implementar en el desarrollo del sistema informático en
20
Métodos empíricos
Observación científica. Permite determinar el problema a investigar para poner una
alternativa de solución
Criterio de Expertos. Mediante la ayuda de profesionales en la rama se valida el
proyecto mediante puntos de vista y se analiza sobre el problema a solucionar.
2.3.2 Técnicas
Como técnicas de investigación se utilizó la encuesta.
2.4 Población y Muestra
Población.
La población tomada en cuenta para llevar a cabo la investigación de campo es:
Tabla Nro.1. Análisis de la población
Extracto Población Técnica
Sector agrícola 600 Encuesta
Total 600
Muestra.
Es un porcentaje del universo que va a ser objeto de estudio en la realización del proyecto ya que ellos serán los encuestados para la obtención de resultados.
m = Tamaño de la Muestra.
U = Población o universo a investigar.
e = Índice de error es igual a 0.1 hasta 0.9.
0.25100 * 1 25 . 0 * e U U m 25 . 0 100 1 . 0 * 599 25 . 0 * 600 m 25 . 0 599 . 0 150 m
0.849
150
m m177 Encuestas.
21
Según los datos de la muestra se deben realizar un total de 177 encuestas.
2.5 Análisis e interpretación de datos.
Encuesta dirigida al sector agrícola de la ciudad de Tulcán.
Pregunta Nº 1:
¿Conoce usted el significado de dron?
Tabla Nro.2. Resultados de la pregunta número 1 de la encuesta
Pregunta N° 1
Opciones Cantidad Porcentaje (%)
Si 0 0%
No 177 100%
Total 177 100%
Fuente: Respuesta de los encuestados a la pregunta número 1
Elaborado por: Katty Moreno
Interpretación:
22
Pregunta Nº 2:
¿Posee usted algún tipo de sistema de vigilancia en su finca o terreno?
Tabla Nro.3. Resultados de la pregunta número 2 de la encuesta
Pregunta N° 2
Opciones Cantidad Porcentaje (%)
Si 8 4.52%
No 169 95.48%
Total 177 100%
Fuente:Respuesta de los encuestados a la pregunta número 2
Elaborado por: Katty Moreno
Interpretación:
La mayoría de la muestra estudiada no posee ningún tipo de sistemas de vigilancia en sus fincas o terrenos puesto que no conocen los diferentes dispositivos para monitoreo, esto ocasiona que sus terrenos estén desprotegidos frente algún riesgo.
Pregunta Nº 3
¿Conoce usted a cerca de dispositivos no tripulados para vigilancia aérea?
Tabla Nro.4. Resultados de la pregunta número 3 de la encuesta
Pregunta N° 3
Opciones Cantidad Porcentaje (%)
Si 25 14.12%
No 152 85.88%
Total 177 100%
Fuente:Respuesta de los encuestados a la pregunta número 3
23
Interpretación:
La mayoría de las personas que son parte del sector agrícola no conocen acerca de la existencia de dispositivos de vigilancia aérea no tripulados ya que ellos están inmersos en sus labores y los gobiernos Cantonales y Provinciales no se han preocupado por instruir a estos sectores en la nueva era tecnológica y los beneficios que brindan estos dispositivos.
Pregunta Nº 4:
¿Está de acuerdo en que su finca o terreno se monitoree desde el aire y se graben videos acerca del estado del terreno en cada vuelo?
Tabla Nro.5. Resultados de la pregunta número 4 de la encuesta
Pregunta N° 4
Opciones Cantidad Porcentaje (%)
Si 130 73.45%
No 47 26.55%
Total 177 100%
Fuente: Respuesta de los encuestados a la pregunta número 4
Elaborado por: Katty Moreno
Interpretación:
24
Pregunta Nº 5:
¿Está de acuerdo en que se implementen dispositivos de vigilancia aérea programados los cuales vigilen su finca o terreno en ciertas horas del día?
Tabla Nro.6. Resultados de la pregunta número 5 de la encuesta
Pregunta N° 5
Opciones Cantidad Porcentaje (%)
Si 140 79.10%
No 37 20.90%
Total 177 100%
Fuente: Respuesta de los encuestados a la pregunta número 5
Elaborado por: Katty Moreno
Interpretación:
Es importante recalcar que algunas personas no están de acuerdo con este tipo de tecnología puesto que ellos toman muy en cuenta los costos de este tipo de dispositivos, pero aun así la mayoría de las personas si están de acuerdo en que sus terrenos o fincas sean monitoreadas en ciertas horas del día y que se graben videos que permitan conocer el estado de los animales y de los cultivos.
2.6. Metodología de la construcción del dispositivo de monitoreo y vigilancia aéreo
25
en las etapas de: análisis, diseño, pruebas e implementación, las cuales se detallan a continuación.
Análisis
En esta fase los analistas de sistemas recopilan la mayor cantidad de información dependiendo de los requerimientos que dispongan las personas del sector agrícola de la ciudad de Tulcán.
Diseño
El diseño de un sistema indica los datos de entrada en este caso comandos de audio o táctiles, aquellos que serán calculados y los que deben ser almacenados. Así mismo, se escriben con todo detalle los procedimientos de cálculo y los datos individuales.
Construcción
En esta fase se pone en práctica todo el estudio y análisis de los diferentes procesos de construcción y programación del dron, para finalmente desarrollar el dispositivo siguiendo todos los parámetros estudiados.
Pruebas
Durante la fase de prueba de sistemas de automatización, el dispositivo se emplea de manera experimental para asegurarse de que el software no tenga fallas; es decir, que funciona de acuerdo con las especificaciones y en la forma en que los usuarios esperan que lo haga.
2.7 Conclusiones parciales del capítulo II
Según los objetivos planteados para el presente trabajo de investigación y tomando en cuenta los resultados obtenidos, se presentan las siguientes conclusiones que fueron resultado de un profundo análisis:
De las preguntas realizadas en la encuesta, la mayoría de la población son campesinos que no tienen conocimientos acerca de la tecnología que actualmente se está manejando a nivel de vigilancia.
En el sector rural de la ciudad de Tulcán que es donde se encuentran la mayoría de las fincas existe muy poca vigilancia y monitoreo de sus terrenos, lo que ocasiona que se presenten robos de animales y también pérdidas en cultivos por ciertas plagas.
26
CAPÍTULO III. DESARROLLO DE LA PROPUESTA
3.1. Título de la Propuesta.
Configuración y programación de un dispositivo de vigilancia y monitoreo aéreo no tripulado.
3.2. Propuesta del Investigador.
La propuesta de la presente tesis de grado se la diseña aplicando metodologías de construcción y programación de drones; realizando el análisis, diseño, construcción y pruebas del dispositivo, etapas que se desarrollan a continuación.
Ilustración 1. DFD 1 - Diagrama de construcción del dispositivo
Fuente: Metodología de construcción y programación del dispositivo - DFD 1 – Ingeniería de software.
Elaborado por: Katty Moreno.
3.2.3. Objetivos de la propuesta.
3.2.3.1. Objetivo General.
Construir un dispositivo de vigilancia aérea que satisfaga los requerimientos del sector agrícola de la ciudad de Tulcán.
Construcción y programación del
dispositivo
Análisis
Diseño
Construcción
27
3.2.3.2. Objetivos Específicos.
Analizar el sistema electrónico que se encarga de controlar el dispositivo aéreo de manera autónoma.
Realizar la configuración del dispositivo en base a la información del medio en el cual se implementará.
Diagnosticar el funcionamiento del dispositivo de vigilancia y monitoreo aéreo mediante filmación de videos.
Realizar las pruebas de funcionamiento, acordes a las acciones que realiza el dispositivo.
3.3. Caracterización de la Propuesta.
La propuesta está orientada a la configuración de un dispositivo aéreo no tripulado para vigilancia y monitoreo del sector agrícola de la ciudad de Tulcán.
La presente investigación se basa en configurar y programar una plataforma robótica aérea, que pueda ser capaz de realizar actividades a través de la inteligencia artificial aplicando principios de aeronáutica, para ello se realizará la configuración de un dispositivo aéreo para monitoreo y vigilancia el cual pueda capturar imágenes de todo el terreno sobrevolado y hacer llegar dicha información al usuario.
La finalidad de esta propuesta es mejorar el monitoreo y vigilancia del sector agrícola de la ciudad de Tulcán y por ende mejorar la investigación en la carrera de Sistemas de la Universidad con el propósito de que esta aplicación informática y todos los dispositivos físicos y equipos necesarios para su funcionamiento se desarrollen y se implementen en beneficio de estudiantes, docentes y la comunidad en general.
Así se cumple con uno de los propósitos principales de la carrera de Sistemas, el cual es innovar tecnológicamente e investigar soluciones y alternativas que aplicadas al medio educativo, den solución a problemas con ideas prácticas.
En definitiva la realización de la propuesta conlleva a promover que en el futuro otras generaciones de estudiantes se motiven y estén dispuestos a incursionar en el campo de la robótica y aeronáutica, logrando de esta manera que la Universidad en sus áreas de enseñanza técnica se afiance aún más.
3.3.1. Análisis del dispositivo Phantom Dji.
28
3.3.1.2. Componentes de Phantom Dji.
3.3.1.2.1. Hardware y Software
Frecuencia: 433 MHz
Voltaje de entrada: 3.7 ~ 15VDC
IC: ATMEGA328P
Dimensiones: 52x29x15mm
Peso: 10,5 g (w/out antena)
3.3v FTDI para Arduino
Puerto serie para actualizar el firmware y la aplicación de telemetría
Puerto de 3.3v I2C para todos los sensores modernos como WiiMotionPlus, WiiNunchuk, giroscopios MEMS, barómetros, acelerómetros y más
9 canales de salida del servo
3.3v MIC5205 regulador de voltaje base con protección de polaridad inversa y apoyo lipo 1S
PWM de salida como salida RSSI. (Puede modificar el código para PWM basado en RSSI de la señal)
Indicadores LED Rojo y azul
Módulo RFM22B de transceptor incluyendo chip Si4432 con configurable la potencia de salida entre 0-100mW, capacidad de salto de frecuencia y cientos de funciones
Procesador Atmega328 16Mhz con Arduino Pro Mini cargador de arranque compatible.
3.3.1.2.2. Descripción del Sistema
Tabla Nro.7. Descripción de requerimientos del sistema
Problema Requerimiento
Falta de Investigación tecnológica Conocimiento más profundo de nuevas tecnologías aéreas actuales.
Desconocimiento general de robótica Profundizar más sobre el tema de la Robótica y aeronáutica.
Desconocimiento del desarrollo y aplicación de dispositivos de vigilancia aérea
Configurar el dispositivo aplicando conocimientos de robótica y aeronáutica dentro de la Universidad.
Fuente: Análisis de los requerimientos del sistema.
29
3.3.2. Diseño de la estructura general del dispositivo aéreo de vigilancia y
monitoreo.
El dispositivo contiene una estructura interna que es la encargada de darle forma y sostener sus componentes, la cual está constituida por numerosos materiales, como plástico, metales, etc. Para la configuración y programación del dron hay que tener en cuenta cuatro puntos importantes que son:
Cerebro.
El circuito principal o de control es el cerebro del dron, el cual está formado por componentes electrónicos; este dron va a realizar el sobrevuelo de terrenos en el sector agrícola de la ciudad de Tulcán.
Las tarjetas electrónicas que se implementan el sistema que administra los periféricos de entrada y salida a controlar, en estas tarjetas se ubican los microcontroladores y dentro de estas los programas ejecutables que se encargan de procesar la información del mundo exterior que a la vez son proporcionados por los diferentes sensores implementados en el dispositivo.
Esqueleto.
El esqueleto es el que soporta todos los componentes electrónicos del dron; los cuales tienen sus respectivas características como son el tamaño, peso y flexibilidad para poder adaptar todos los elementos con los cuales está conformado el dispositivo.
Es así que el esqueleto principal es de material plástico, como la mayoría de los elementos a implantar, lo cual le da al dron un menor peso para que tenga más movilidad y pueda realizar las acciones requeridas, pero a la vez puede soportar otras partes o piezas.
Hélices.
30 Fuente: Análisis del funcionamiento del dispositivo.
Elaborado por: Katty Moreno
Posicionamiento Global.
Es la ubicación del dispositivo, este dron incluye un Gps mediante el cual puede verificar su posición inicial, partir desde ahí hacer su respectivo recorrido y finalmente llegar al mismo punto de partida; esto es posible gracias a la triangulación de los diferentes satélites que se encuentran en la estratósfera a nivel mundial, los cuales brindan información al dispositivo y este las analiza y saca su posición en el globo terrestre.
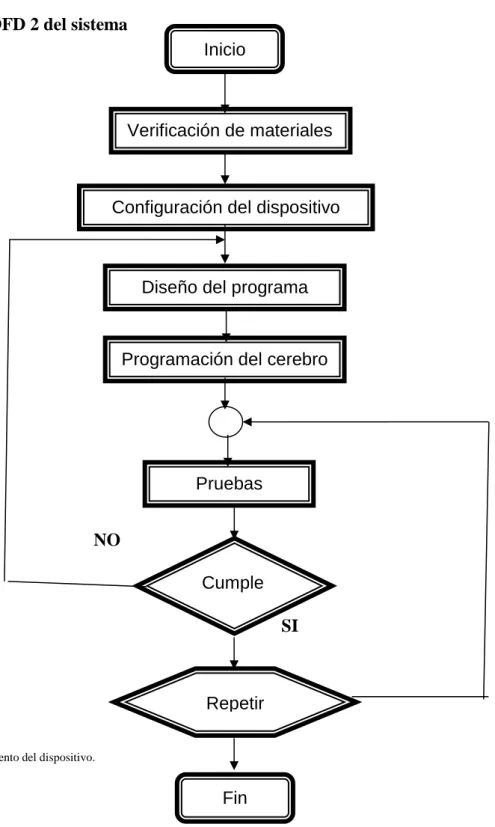
3.3.2.1. Proceso de diseño del dispositivo.
Ilustración 2. DFD 2 del sistema
NO
SI
Repetir
Fin Inicio
Verificación de materiales
Configuración del dispositivo
Diseño del programa
Programación del cerebro
Pruebas
31
3.3.3. Construcción del dispositivo
3.3.3.1. Estructura General del dispositivo
El diseño del dispositivo aéreo de vigilancia y monitoreo está compuesto de los siguientes elementos:
Cerebro principal del dispositivo.
El cerebro del Phantom Dji presenta características que son utilizadas para el control de los 4 motores en donde están las hélices las cuales se encargan de elevar y orientar el dispositivo con el fin de que el dispositivo esté estable en el aire; consta de un puerto en donde se conecta el GPS con el cual el Dron puede moverse libremente en el espacio, también consta de un puerto en donde se conecta un dispositivo con el cual se puede enviar la imagen de la cámara hacia un celular; todos estos dispositivos están interconectados al procesador central el cual se encarga de dirigir las acciones programadas.
Ilustración 3. Arquitectura del dispositivo
Fuente: Imagen de la arquitectura interna del dispositivo.
32
Una vez que se conoce el tipo de cerebro que está encargado de guardar y procesar la información, se procede a ensamblar sus partes, donde se puede ver cómo está incorporado en el dron; el cerebro controla todos los movimientos ejecutados por los programas guardados en el mismo.
Servomotores.
Los servomotores permiten dar fuerza al dron para mover las hélices y así poder desplazarse; estos motores pueden girar a muy altas revoluciones para darle mayor fuerza al dispositivo y son la parte fundamental del dron.
Ilustración 4. Motor del dispositivo
Fuente: Imagen del motor del dron.
Elaborado por: Katty Moreno
Estos servomotores le dan potencia al dispositivo y están conectados al cerebro mediante los respectivos cables para ejecutar las respectivas instrucciones programadas.
Hélices.
33
Ilustración 5. Hélices del dispositivo
Fuente: Imagen de las hélices del dron
Elaborado por: Katty Moreno
Control remoto.
Este dispositivo sirve para manipular manualmente el dispositivo, tiene un alcance de 300 metros y simplemente cumple las veces de un mando a distancia que le permite al usuario controlar manualmente el dispositivo.
Ilustración 6. Control remoto del dispositivo
Fuente: Imagen del control remoto del dron.
34
Batería.
La batería se encarga de dar corriente a todos los dispositivos que conforman el dispositivo; su voltaje es de 11,1 voltios y si intensidad de corriente es de 2,2 amperios; su tiempo de duración es de aproximadamente entre 20 a 25 minutos.
Ilustración 7. Batería del dispositivo
Fuente: Imagen de la batería del dron.
Elaborado por: Katty Moreno
Cargador de batería.
Este dispositivo se utiliza para darle carga a la batería puesto que el tiempo de duración de vuelo del dispositivo es de 20 a 25 minutos; por lo tanto; el cargador de batería es indispensable para el dispositivo.
Ilustración 8. Cargador de la batería del dispositivo
Fuente: Imagen del cargador de la batería del dron.
35
Módulo de empotramiento de las partes.
Es un módulo plástico que permite la inserción de las diferentes partes como son los motores, hélices, cableado, tarjeta madre, cámara, etc.
Ilustración 9. Dispositivo construido
Fuente: Fotografía del dron construido.
Elaborado por: Katty Moreno
Cámara de video.
Este dispositivo se encarga de tomar imágenes y video de los lugares por donde sobrevuela el dispositivo, su capacidad de almacenamiento es útil para grabar las diferentes acciones de cada vuelo.
Ilustración 10. Cámara del dispositivo
Fuente: Fotografía de la cámara del dron.
36
Dron ensamblado.
Este dispositivo ensamblado es el encargado de realizar la vigilancia y monitoreo del sector agrícola de la ciudad de Tulcán.
Ilustración 11. Dispositivo ensmblado
Fuente: Fotografía posterior del dron.
Elaborado por: Katty Moreno
3.3.3.2. Programación
Una vez ensamblado el dispositivo se procede a configurarlo y programarlo para lo cual se utiliza el software llamado DJI NAZAM, que se encarga de controlar el cerebro para realizar las diferentes ejecuciones de los comandos para hacer las respectivas acciones de vuelo.
A continuación se procede a explicar cómo funciona el programa de configuración, para ver cómo se ejecutan las secuencias de comandos programados para los respectivos movimientos del dispositivo.
37
Ilustración 12. Código de programación del dispositivo
Fue nte : Ima g en d e c a p t u ra d e p a n t a lla d el c ód i g o d e p r o gra m a c i ón d el d ron E l a bo ra do po r: Ka t t y M o ren o
A continuación se muestra la barra de herramientas presente en el software DJI NAZAM.
Ilustración 13. Vista principal del software de programación del dispositivo
38
Aquí se pueden destacar la vista principal del funcionamiento de los diferentes accesorios del dispositivo como motores, GPS, voltajes, etc.
3.3.3.3. Herramientas básicas.- En esta barra se muestra la configuración básica del dispositivo.
Ilustración 14. Vista de herramientas básicas del software del dispositivo
Fue nte : Ima g en d e c a p t u ra d e p a n t a lla d el s oft wa r e d e p r og ra ma c i ón d el d ron
Elaborado por: Katty Moreno
3.3.3.3.1. Herramientas avanzadas de control.
En la siguiente ventana se muestra la configuración de potencia de los diferentes motores en tipo intermedio e inteligente.
Ilustración 15. Vista de herramientas avanzadas del software del dispositivo
Fue nte : Ima g en d e c a p t u ra d e p a n t a lla d el s oft wa r e d e p r og ra ma c i ón d el d ron
39
3.3.3.3.2. Herramientas de control de estabilidad.
Estas herramientas son utilizadas para realizar un control de estabilidad y calibración del dispositivo con el fin de que en el proceso de vuelo se mantenga estable ante cualquier posible evento natural.
Ilustración 16. Vista del panel de herramientas del software del dispositivo
Fue nte : Ima g en d e c a p t u ra d e p a n t a lla d el s oft wa r e d e p r og ra ma c i ón d el d ron
Elaborado por: Katty Moreno
3.3.4. Pruebas
Después de la configuración del dron y la programación con la cual se va a manipular el mismo se procede a realizar las pruebas con los debidos dispositivos.
3.3.4.1. Primera Prueba – Sensor de Giroscopio
Este sensor de giroscopio se encarga de verificar la estabilidad del dispositivo para que este no caiga o se traslade hacia un sector equivocado; las pruebas realizadas con este sensor involucran a los motores y las hélices que son las encargadas de dar potencia al dispositivo.
3.3.4.2. Resultados
40
En el siguiente gráfico se observa como el dron se mantiene en el aire de forma estable.
Ilustración 17. Dispositivo en modo de vuelo
Fue nte : Fot o gra fí a d el d r on en mod o d e vu e lo
Elaborado por: Katty Moreno
3.3.4.3. Segunda Prueba – GPS
En esta prueba utilizamos el Sistema de Posicionamiento Global (GPS), el cual le permite al dron navegar mediante coordenadas geográficas a distintos lugares y posteriormente volver al lugar de origen o aterrizar en ciertas posiciones.
3.3.4.4. Resultados
41
Ilustración 18. Fotografía interna del dispositivo
Fue nte : Fot o gra fí a d e la a rq u i t ec t u ra i n t ern a d el d r on
Elaborado por: Katty Moreno
3.4. Validación de la Propuesta.
La validación de la propuesta se realizó mediante la vía de expertos, los cuales son Ingenieros en el área de Sistemas, a quienes se les pidió revisar cómo está estructurado el dispositivo, así como la configuración y programación del mismo, realizando pruebas del software las mismas que fueron enviadas al cerebro del dron para ser ejecutadas en presencia de los expertos, obteniendo los resultados propuestos y constatando así el correcto funcionamiento del dispositivo.
Posteriormente se pidió a cada uno de los expertos llenar la ficha de validación de la propuesta en la cual constan aspectos principales del dispositivo, las mismas que fueron llenas a criterio de cada uno de ellos.
Validador 1.
Nº de cédula: 0401230370
Nombres y Apellidos: Hernán Javier Guancha
Título de mayor jerarquía: Ingeniero en Sistemas.
Institución que labora: Uniandes - Tulcán
Cargo Actual: Docente de tiempo completo.
Años de servicio: 4 años.
42
Validador 2.
Nº de cédula: 0401592514
Nombres y Apellidos: Daniel Paúl Rodríguez Guzmán.
Título de mayor jerarquía: Ingeniero en Sistemas Mercantiles.
Institución que labora: Uniandes - Tulcán
Cargo Actual: Asistente de Telemática.
Años de servicio: 2 años.
Experiencia profesional: 2 años 6 meses.
Validador 3.
Nº de cédula: 0401398003
Nombres y Apellidos: Darwin Andrés Becerra Araújo.
Título de mayor jerarquía: Ingeniero en Sistemas e Informática.
Institución que labora: Uniandes
Cargo Actual: Docente.
Años de servicio: 6 años.
Experiencia profesional: 8 años.
Una vez realizadas las respectivas validaciones mediante expertos de Sistemas se obtuvieron los siguientes resultados:
43
Tabla Nro.8. Resultados de la validación de expertos
Fue nte : C a rá c t e r c i en t í fi c o d e la p rop u est a
Elaborado por: Katty Moreno
En el segundo indicador de la calidad se preguntó por la estructura metodológica de la configuración y programación del dron para monitoreo y vigilancia del sector agrícola de la ciudad de Tulcán; obteniendo los siguientes resultados:
Tabla Nro.9. Resultados de la validación de expertos
Fue nte : Est ru c t u ra met od o ló gi c a d e la p rop u est a
Elaborado por: Katty Moreno
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 100%
Satisfactorio 0 0%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 0%
Satisfactorio 0 100%
Poco satisfactorio 0 0%
No satisfactorio 0 0%