FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
DISEÑO DE UN SISTEMA DE CONTROL ÓPTIMO
PROPORCIONAL INTEGRAL DE NIVEL DE LÍQUIDO
INFORME DE SUFICIENCIA
PARA OPTAR EL TÍTULO PROFESIONAL DE
INGENIERO ELECTRÓNICO
PRESENTADO POR:
JESUS ENRIQUE SIPAN REYES
PROMOCIÓN
1979 - 11
El presente informe nos permite diseñar un sistema de control óptimo proporcional integral a fin de mantener controlado el nivel de líquido en un tanque.
En el Capítulo I se presenta una Introducción a los Sistemas de Control, haciendo una descripción del sistema y analizando los diferentes tipos de controladores.
En el Capítulo II se desarrolla el modelamiento matemático del sistema en lazo abierto del sistema tanque.
En el Capítulo 111 se desarrollan los conceptos de procesamiento y control digital, así como la discretización de la planta a partir del modelado continuo desarrollado en el capítulo II utilizando Matlab.
PRÓLOGO CAPÍTULO 1
INTRODUCCIÓN A LOS SISTEMAS DE CONTROL
1.1 Leyes físicas fundamentales en los sistemas hidráulicos 1.2 Análisis matemático de los sistemas hidráulicos
1.2.1 Definición
1.2.2 Elementos de los sistemas hidráulicos 1.3 Descripción de control
1.4 Selección de la acción del controlador 1.5 Variaciones
1.6 Características del proceso y controlabilidad 1. 7 Tipo de respuestas de los controladores 1. 7 .1 Control si/no
1. 7 .2 Acción proporcional 1.7.3 Acción integral 1. 7.4 Acción derivativa 1. 7 .5 Acción óptima
1.8 Medidores de flujo y nivel 1.8.1 Medidor de flujo
1.8.2 Medidor de nivel
1.9 Utilización de Matlab y Simulink
CAPÍTULO 11
MODELAMIENTO DEL PROCESO 2.1
2.2
Estructura y descripción del proceso Modelamiento del sistema en lazo abierto 2.2.1 Ecuaciones físicas
2.2.2 Ecuaciones en espacios de estados
2.2.3 Controlabilidad y observabilidad del sistema
2.2.4 Respuesta al escalón unitario en Matlab
2.3
Simulación del sistema en Simulink
CAPÍTULO 111
DISCRETIZACIÓN DEL PROCESO
3.1
Simulación y Rediseño Digital
43
45
47
47
3.1.1 Simulación y modelado digital con dispositivos de muestreo y retención 48
3.2
Simulación digital, formulación con variables de estado
53
3.2.1
3.3
3.4
Simulación digital, integración numérica
Discretización del Sistema del nivel de líquido del tanque
Simulación del sistema en lazo abierto
CAPÍTULO IV CONTROL ÓPTIMO
4.1 Ecuación discreta de Euler - Lagrange
4.2 Principio discreto del máximo (mínimo)
53
54
56
59 59
63
4.3 Control de tiempo óptimo con restricción de energía
67
4.4 Diseño del regulador digital lineal óptimo
70
4.4.1 Diseño del regulador digital lineal
73
4.5 Solución de la ecuación discreta de Riccati
73
4.5.1 Método recursivo para resolver la ecuación discreta de Riccati
73
4.5.2 Método de valores y vectores propios
74
4.6 Sensibilidad al periodo de muestreo
76
4. 7 Observador de estados digital
79
4.7.1 Diseño del observador de estados de orden completo
80
4.8 Aplicación del Control óptimo del nivel del líquido del tanque
81
4.8.1 Aplicación Control óptimo proporcional estacionario y simulación
81
4.8.2 Aplicación Control óptimo proporcional integral y simulación
84
CONCLUSIONES
88
En la teoría de control tenemos la capacidad de poder modelar dispositivos físicos, analizar su comportamiento y proponer controladores para cumplir objetivos de estabilidad y performance en el dominio del tiempo.
El presente trabajo se realizó basándose en las bases teóricas de la teoría de Control que utilizaremos para la aplicación de un caso en particular.
Aquí analizamos el caso de un tanque que consta de una entrada y una salida de líquido, siendo nuestra tarea el lograr regular el nivel del líquido que habrá en este deposito, para ello tendremos que controlar ya sea la entrada o la salida de éste.
1.1. Leyes físicas fundamentales de los sistemas hidráulicos
El proceso de modelado analítico, se divide en tres grandes partes. La primera de ellas consiste en la delimitación del modelo en función de los fenómenos que resultan relevantes de acuerdo al problema que se quiere resolver. Esta es una etapa que no puede sistematizarse fácilmente y que requiere de una cierta dosis de experiencia en relación al sistema a modelar.
Una vez delimitados los fenómenos que se consideraron relevantes para la construcción del modelo, podemos pasar a la siguiente etapa en la que se deben formalizar las relaciones constitutivas y estructurales asociadas respectivamente a los fenómenos considerados y a la forma en que estos se disponen dentro del sistema. En los sistemas físicos, estas relaciones constitutivas y estructurales encuentran su expresión formal (matemática) en las leyes fundamentales de los dominios de la física asociados a los fenómenos mencionados.
Por este motivo, el modelado analítico de un sistema físico no es posible sin un conocimiento de las leyes elementales asociadas a los fenómenos en cuestión. Teniendo en cuenta que en este informe trataremos con sistemas hidráulicos, haremos a continuación un repaso de las leyes físicas que rigen la dinámica de los mencionados sistemas.
Navier-Stockes). Por otra parte los cambios en las variables descriptivas de los fluidos originan cambios en la temperatura, de la cual a su vez dependen los parámetros físicos de aquellos. Este fuerte acoplamiento fluido mecánico-térmico viene a aumentar la complejidad de las descripciones más detalladas.
No obstante, hay en la técnica un subconjunto muy importante de sistemas de fluidos dinámicos que se pueden describir con muy buen grado de aproximación mediante modelo de parámetros concentrados. Esto significa que en determinadas regiones espaciales las magnitudes físicas pueden considerarse uniformes (constantes en el espacio) y hasta despreciables, teniendo sólo variación temporal. Esto conduce a su descripción dinámica con ecuaciones diferenciales ordinarias.
Este subconjunto de sistemas son designados usualmente como Sistemas Hidráulicos. En estos casos, el fluido es en general agua y siendo baja su compresibilidad, y bajas las velocidades aún para caudales importantes, se pueden hacer una serie de hipótesis simplificatorias que permiten tratarlos como circuitos hidráulicos.
Continuaremos entonces con el enfoque de la ingeniería, donde es usual plantear las ecuaciones de balance de materia a través del caudal volumétrico en lugar del caudal másico. También despreciaremos en general la interacción con los efectos térmicos, cabe aclarar que el enfoque tendrá validez a condición de considerar pequeñas variaciones dinámicas de las variables en torno a sus puntos estáticos de operación.
1.2 Análisis matemático de los sistemas hidráulicos
1.2.1 Definición
En general, un análisis matemático exacto no es viable debido a las características no lineales y la naturaleza distribuida del fluido. Sin embargo, se pueden realizar estudios aproximados basados en modelos de parámetros concentrados y linealizando las ecuaciones resultantes.
w : velocidad del flujo volumétrico (m 3 /s) v volumen (m 3)
h altura (m) p presión ( N/m 2 )
Para utilizar como variable la presión relativa se suele escoger como referencia la presión atmosférica.
P•(t) = p(t)-Pa
donde p*(t) es la presión relativa y p0 es la presión atmosférica.
1.2.2 Elementos de los sistemas hidráulicos
a) Capacidad
(1.1)
Cuando un líquido es almacenado en un recipiente abierto, existe una relación algebraica entre el volumen total del líquido y la presión en la base del recipiente. La capacidad hidráulica es la relación entre el incremento del volumen de fluido y la variación de presión producida en el fondo del recipiente. Para un recipiente de forma arbitraria con área transversal A(h), donde h es la altura desde la base, la capacidad hidráulica C(h) puede calcularse según la siguiente expresión:
c(h) = A(h) p.g La presión absoluta en la base del recipiente es:
P = p.g.h + Pa
(1.2)
(1.3)
Para obtener las velocidades de variación del volumen, altura o presión a lo largo del tiempo, se realiza un balance del flujo de masa en el elemento:
V= Win (t) -Wout (t)
•
1
h
=--
(w (t)-w (t) A(h) · in out• 1
P =-- (w (t)-w (t)) C(h) · in out
(1.4)
(1.5)
(1.6)
b) Resistencia
Cuando un líquido fluye a través de una tubería, atraviesa una válvula o un orificio, existe una pérdida de presión asociada a la disipación de energía. Normalmente esta pérdida de presión obedece a una ley no lineal respecto al flujo del tipo:
w=k .
.fip
(1.7)La simbología técnica que se usa para estos elementos en circuitos hidráulicos es la siguiente:
+
iJpFigura 1.1: Resistor hidráulico (válvula)
donde k es un parámetro constante que depende de las características de la tubería, válvula u orificio.
w
w*
w
Figura 1.2: Características de las resistencias
La resistencia hidráulica R del elemento es la relación entre la pérdida de presión y su variación de caudal asociada. Puede calcularse como la inversa de la pendiente en ese punto de la ecuación constitutiva del elemento. Para linealizar una ecuación constitutiva de la resistencia hidráulica alrededor del punto de operación, se aproxima la función no lineal por un desarrollo en serie de Taylor de orden 1:
- dw
w= w+-- (!J..p-!J..p)+ ....
sobre el que se puede introducir el concepto de resistencia hidráulica:
- 1
-w-w=-(�p-�p)R
El valor de la resistencia R puede expresarse en función de �P ó w:
c) Fuentes de energía
R = 2.,ft.; = 2.w k k2
(1.9)
(1.10)
Para sistemas hidráulicos, la fuente de energía es generalmente una bomba que obtiene la potencia a partir de un motor eléctrico.
El caso más común es el de bombas centrífugas a velocidad constante, cuyas curvas características típicas son de la siguiente forma:
.fyJ
*
Pi
+
.fyJ-w w
Figura 1.3: Características de la bomba
Para modelar una bomba a velocidad constante en un modelo lineal, se debe evaluar primero el punto de operación calculando �P y �w. Para pequeños desplazamientos alrededor del punto de operación, puede también linealizarse la ecuación característica de la bomba, de manera similar a lo indicado para la resistencia. aunque el problema de la bomba no está presente pero tácitamente es la fuente de agua del caudal de entrada.
q(t)
===tx1==L]
+
í
--h
1
Área A
1 ,1
.,
Figura 1.4: Sistema Tanque
La resistencia R representa la pérdida de carga en la tubería por unidad de caudal. El caudal que sale del depósito Q está relacionado con la presión hidrostática (o altura del nivel de agua) y con la resistencia. Suponiendo que la ecuación característica de la pérdida de carga en la válvula es aproximadamente lineal, se desea modelar matemáticamente el sistema, encontraremos el punto de equilibrio y estudiar su comportamiento en movimiento libre, así como la respuesta del sistema ante una entrada de caudal q(t) escalón.
Para una resistencia lineal el caudal que sale del depósito esta dado por:
Q=
!!_R
(1.13)Haciendo un balance de masa en el interior del depósito obtenemos la ecuación diferencial del sistema:
R.A. dh(t)
+
h(t)= R.q(t) dtEl punto de equilibrio se alcanzará cuando: h=R.q
(1.14)
(1.15)
Para pequeños desplazamientos alrededor del punto de equilibrio, el sistema se comporta como un sistema lineal de orden 1 con tiempo de respuesta T = (R-A):
Movimiento libre
h(t)
=
(h0 -R.E).e r ( 1.17)Respuesta ante entrada rampa de pendiente A
h(t)
=
(h0 + T.A).e r + A.t - a.T (1.18)En nuestro caso la relación entre caudal y presión depende también de un parámetro que representa la variación de la apertura de una válvula.
1.3 Descripción de control
Al llevar a cabo la función de control, el controlador automático usa la diferencia entre el valor de consigna y las señales de medición para obtener la salida hacia la válvula , la precisión y capacidad de respuesta de estas señales es la limitación básica en la habilidad del controlador para controlar correctamente la medición. Si el transmisor no envía una señal precisa, o si existe un retraso en la medición de la señal, la habilidad del controlador para manipular el proceso será degradada. Al mismo tiempo, el controlador debe recibir una señal de valor de consigna precisa (Set-point).
En controladores que usan señales de valor de consigna neumática o electrónica generadas dentro del controlador, una falla de calibración del transmisor de valor de consigna resultará necesariamente que la unidad de control automático llevará a la medición a un valor erróneo. La habilidad del controlador para posicionar correctamente la válvula es también otra limitación. Si existe fricción en la válvula , el controlador puede no estar en condiciones de mover la misma a una posición de vástago específica para producir un caudal determinado y esto aparecerá como una diferencia entre la medición y el valor de consigna.
Para controlar el proceso, el cambio de salida del controlador debe estar en una dirección que se oponga a cualquier cambio en el valor de medición.
Figura 1.5: Control con flotador
o
-+---o
% 50Porcentaje de nivel
%100
Figura 1.6: Característica lineal
A medida que el nivel va desde el 0% al 100%, la válvula se desplaza desde la apertura total hasta totalmente cerrada. La función del controlador automático es producir este tipo de respuesta opuesta sobre rangos variables, como agregado, otras respuestas están disponibles para una mayor eficiencia del control del proceso.
1.4 Selección de la acción del controlador
Dependiendo de la acción de la válvula, un incremento en la medida puede requerir incrementos o disminuciones del valor de salida para el control. Todos los controladores Pueden ser conmutados entre acción directa y acción reversa.
La acción directa significa que cuando el controlador ve un incremento de señal desde el transmisor, su salida se incrementa .La acción reversa significa que un incremento en las señales de medición hacen que la señal de salida disminuya.
controlador lleva a cabo su trabajo manteniendo el balance en un estado permanente, y actuando para restaurar el balance entre el suministro y la demanda cuando el mismo es modificado por alguna variación.
1.5 Variaciones
Cualquiera de los siguientes tres eventos podría ocurrir requiriendo un caudal diferente para mantener el nivel en el tanque. Primero, si la posición de la válvula manual de salida fuera abierta ligeramente, entonces un caudal mayor saldría del tanque, haciendo que el nivel caiga .
Este es un cambio bajo demanda, y para restaurar el balance, la válvula de entrada de caudal debe ser abierta para proveer un mayor ingreso de líquido. Un segundo tipo de condición de desbalance sería un cambio en el valor de consigna. El tercer tipo de variación sería un cambio en el suministro, si la presión de salida de la bomba se incrementara, aún si la válvula de entrada se mantuviera en su posición, el incremento de presión causaría un mayor caudal, haciendo que el nivel comience a elevarse. Al medir el incremento, el controlador de nivel debería cerrar la válvula en la entrada para mantener el nivel a un valor constante.
1.6 Características del proceso y controlabilidad
El controlador automático usa cambios en la posición del actuador final para controlar la señal de medición, moviendo el actuador para oponerse a cualquier cambio que observe en la señal de medición. La controlabilidad de cualquier proceso es función de lo bien que una señal de medición responde a éstos cambios en la salida del controlador; para un buen control la medición debería comenzar a responde en forma rápida, para luego no cambiar rápidamente. Debido al tremendo número de aplicaciones del control automático, caracterizar un proceso por lo que hace, es una tarea engorrosa. Sin embargo, todos los procesos pueden ser descritos por una relación entre las entradas y las salidas. Si al ejemplo de tanque aumentamos una nueva señal como la temperatura debemos tener en cuenta la respuesta de la temperatura del intercambiador de calor cuando la válvula es abierta incrementando manualmente la señal de salida del controlador.
el primero es el tiempo muerto (dead time en inglés), o sea el tiempo antes de que la medición comience a responder, en éste caso, el tiempo muerto se eleva debido a que el calor en el vapor debe ser conducido hasta el agua antes de que pueda afectar la temperatura, y luego hacia el transmisor antes de que el cambio pueda ser percibido. El tiempo muerto es una función de las dimensiones físicas de un proceso y cosas tales como las velocidades de correas y regímenes de mezcla. Segundo, la capacidad de un proceso es el material o energía que debe ingresar o abandonar el proceso para cambiar las mediciones, es por ejemplo, los litros necesarios para cambiar el nivel, las calorías necesarias para cambiar la temperatura, o los metros cúbicos de gas necesarios para cambiar la presión. La medición de una capacidad es su respuesta para un paso de entrada. Específicamente, el tamaño de una capacidad es medida por una constante de tiempo, que es definida como el tiempo necesario para completar el 63% de su respuesta total. La constante de tiempo es una función del tamaño del proceso y del régimen de transferencia de material o energía. Para este ejemplo, cuanto más grande sea el tanque, y menor el caudal de vapor, mayor será la constante de tiempo. Estos números pueden ser de tan sólo algunos segundos, o tan largos como varias horas. Combinados con el tiempo muerto, los mismos definen cuanto tiempo lleva para que la señal responda a cambios en la posición de la válvula.
To
J
caudal de vapor manual
t
t
temperatura de salida de agua
tiempo
tiempo muerto
Figura1.7: Caso especial con señal de temperatura
1.7 Tipos de respuestas de controladores
La primera y más básica característica de la respuesta del controlador ha sido indicada como la acción directa o reversa. Una vez que esta distinción se ha llevado a cabo, existen varios tipos de respuestas que pueden ser usadas para controlar un proceso, siendo importante tener un conocimiento claro del control que utilizaremos con respecto a otros controladores. Entre los más utilizados tenemos:
• Control si/no (o on/off con sus siglas en inglés), o control de dos posiciones • Control proporcional
• Acción integral • Acción derivativo • Control Óptimo
1. 7 .1 Control si/no
Medida
100
Porcentaje
de abertura
de la valvula
o
Valor de consigna
tiempo
Figura 1.8: Control on/off
dentro de una banda muy estrecha alrededor del valor de consigna, y este control puede ser muy aceptable, si el ciclo no es muy rápido. El tipo de control usado con mayor frecuencia en la industria es el Si/No. Sin embargo si la medición del proceso es más sensible a los cambios en el suministro, la amplitud y frecuencia del ciclo comienza a incrementarse, en algún punto el ciclo se volverá inaceptable y alguna forma de control proporcional deberá ser aplicada.
Para estudiar los otros tres tipos de modos de control automático se usaran respuesta de lazo abierto. Un lazo abierto significa que sólo la respuesta del controlador será considerada.
�--!---
salida\
· m
_edicion
Registrador aJuste
Figura 1.9: Respuesta de control a lazo abierto
La figura 1.9 muestra un controlador automático con una señal artificial como la medición introducida desde un regulador manual. El valor de consigna es introducido normalmente y la salida es registrada. Con éste arreglo, las respuestas específicas del controlador a cualquier cambio deseado en la medición puede ser observada.
1.7.2 Acción proporcional
La respuesta proporcional es la base de los tres modos de control, si los otros dos, acción integral (reset) y acción derivativa están presentes, éstos son sumados a la respuesta proporcional. "Proporcional" significa que el cambio presente en la salida del controlador es algún múltiplo del porcentaje de cambio en la medición.
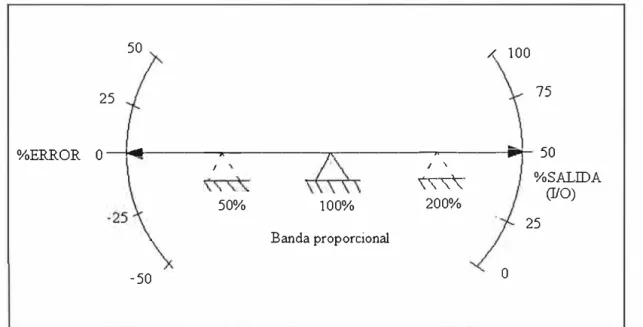
La figura 1.1 0a ilustra la respuesta de un controlador proporcional por medio de un indicador de entrada/salida pivotando en una de estas posiciones . Con el pívot en el centro entre la entrada y la salida dentro del gráfico, un cambio del 100% en la medición es requerido para obtener un 100% de cambio en la salida, o un desplazamiento completo de la válvula. Un controlador ajustado para responder de ésta manera se dice que tiene una banda proporcional del 100%. Cuando el pívot es hacia la mano derecha, la medición de la entrada debería tener un cambio del 200% para poder obtener un cambio de salida completo desde el 0% al 100%, esto es una banda proporcional del 200%. Finalmente, si el pívot estuviera en la posición de la mano izquierda y si la medición se moviera sólo cerca del 50% de la escala, la salida cambiaría 100% en la escala. Esto es un valor de banda proporcional del 50%. Por lo tanto, cuanto más pequeña sea la banda proporcional, menor será la cantidad que la medición debe cambiar para el mismo tamaño de cambio en la medición, o en otras palabras, menor banda proporcional implica mayor cambio de salida para el mismo tamaño de medición. Esta misma relación está representada por la figura 1.1 0a
50 ,< 100
25 75
%ERROR o-14---,,,---¡,,;---.�---t1� 50
-50
/
50% 100%
Banda proporcional
/
'
'(\ \\200%
Figura 1.1 Oa: Acción proporcional
o
%SALIDA (I/0)
% de salida (I/0) 50
o
-so
50%1 1
r
-+-1 1
--+-+
1 1
o
%errorFigura 1.1 Ob: Acción proporcional 50
Este gráfico (figura 1.1 0b) muestra cómo la salida del controlador responderá a medida que la medición se desvía del valor de consigna. Cada línea sobre el gráfico representa un ajuste particular de la banda proporcional. Dos propiedades básicas del control proporcional pueden ser observadas a partir de éste gráfico:
punto de causar un ciclo constante de la medición. Este valor de banda proporcional, conocido como la última banda proporcional, es un límite en el ajuste del controlador para dicho lazo. Por otro lado, si se usa una banda proporcional muy ancha, la respuesta del controlador a cualquier cambio en la medición será muy pequeña y la medición no será controlada en la forma suficientemente ajustada. La determinación del valor correcto de banda proporcional para cualquier aplicación es parte del procedimiento de ajuste (tuning procedure) para dicho lazo. El ajuste correcto de la banda proporcional puede ser observado en la respuesta de la medición a una alteración.
Caudal de agua(carga)
temperatura A Banda prop. muy ancha
B Banda prop. correcta C Banda prop. angosta
Figura 1.11 : Respuesta de lazo cerrado
La figura 1.11 muestra varios ejemplos de bandas proporcionales variadas para el intercambiador de calor.
Idealmente, la banda proporcional correcta producirá una amortiguación de amplitud de cuarto de ciclo en cada ciclo, en el cual cada medio ciclo es ½ de la amplitud del medio ciclo previo. La banda proporcional que causará una amortiguación de onda de un cuarto de ciclo será menor , y por lo tanto alcanzará un control mas ajustado sobre la variable medida, a medida que el tiempo muerto en el proceso decrece y la capacidad se incrementa.
apertura sólo puede ser alcanzado a un nivel menor. En otras palabras, para restaurar el balance entre el caudal de entrada y el de salida, el nivel se debe estabilizar a un valor debajo del valor de consigna (o setpoint ). Esta diferencia, que será mantenida por el lazo de control, es llamada offset, y es característica de la aplicación del control proporcional único en los lazos de realimentación. La aceptabilidad de los controles sólo proporcionales dependen de si este valor de offset será o no tolerado, ya que el error necesario para producir cualquier salida disminuye con la banda proporcional, cuanto menor sea la banda proporcional, menor será el offset. Para grandes capacidades, y aplicaciones de tiempo muerto pequeñas que acepten una banda proporcional muy estrecha, el control sólo-proporcional será probablemente satisfactorio dado que la medición se mantendrá a una banda de un pequeño porcentaje alrededor del valor de consigna. Si es esencial que no haya una diferencia de estado estable entre la medición y el valor de consigna bajo todas las condiciones de carga, una función adicional deberá ser agregada al controlador.
1.7.3 Acción integral
Esta función es llamada acción integral o reset. La respuesta del lazo abierto del modo reset es mostrada en la figura 1.12, que indica un escalón de cambio en algún instante en el tiempo. En tanto que la medición estuviera en su valor de consigna, no existiría ningún cambio en la salida debido al modo de reset en el controlador.
% de medicion
_J
- _ l _
Valor de consigna% de salida
1::J.empo
Sin embargo, cuando cualquier error exista entre la medición y el valor de consigna, la acción de reset hace que la salida comience a cambiar y continúe cambiando en tanto el error exista. Esta función, entonces, actúa sobre la salida para que cambie hasta un valor correcto, necesario para mantener la medición en el valor de consigna.
Esta respuesta es agregada a la banda proporcional del controlador según se muestra en la figura 1.13
El escalón de cambio en la medición, produce primero una respuesta proporcional, y luego una respuesta de reset es agregada a la proporcional. Cuanto más acción de reset o integral exista en el controlador, más rápido cambia la salida en función del tiempo. Entre las varias marcas de controladores, la salida de acción integral es medida de una o dos maneras, tanto en minutos por repetición, o en número de repeticiones por minuto. Para aquellos controladores que miden en minutos por repetición, el tiempo de reset es la cantidad de tiempo necesaria para que dicho modo repita la respuesta del lazo abierto causada por el modo proporcional para un paso de cambio de error. Así , para estos controladores, cuanto menor sea el valor de reset, mayor será la acción del modo reset. En aquellos controladores que miden la acción de reset en repeticiones por minuto, el ajuste indica cuantas repeticiones de la acción proporcional son generados por el modo de reset en un minuto. Así, para dichos controladores cuanto mayor sea el valor de reset, mayor será la acción integral. El tiempo de reset es indicado en la figura 1.13.
% de medición
% de salida (I/0)
_J
....
a
b
tiempo
- _ l _
Valor de consignaRr,
=
tiempo de res et :Min/RPT.El correcto valor de la acción reset depende de que tan rápido puede responder la medición al recorrido adicional de válvula que la misma causa. El controlador no debe comandar la válvula más rápido que el tiempo muerto en el proceso, permitiendo que la medición responda, o de otra manera la válvula irá a sus límites antes de que la medición pueda ser retornada nuevamente al valor de consigna. La válvula se mantendrá entonces en su posición extrema hasta que la medición cruce el valor de consigna en la dirección opuesta. El resultado será un ciclo de reset en el cual la válvula se desplaza de un extremo al otro a medida que la medición oscila alrededor del valor de consigna. Cuando el reset es aplicado en los controladores en procesos en serie en que la medición está alejada del valor de consigna por largos períodos entre series, el reset puede llevar la salida a un máximo resultando en una oscilación de reset. Cuando la próxima serie se inicie, la salida no alcanzará su máximo hasta que la medición cruce el valor de consigna produciendo grandes desviaciones. El problema puede ser prevenido mediante la inclusión de una "llave de serie" en el controlador
1.7.4 Acción Derivativa
% de medición
% de salida (I/0)
r
% de medicion
% de salida
-.---Figura 1.14: Acción derivativa
Dr
=
Tiempo en minutos---
Dr _=:=-�
--j
Sólo proporcionaltiempo
proporcional derivativo
Figura 1.15 : Acción derivativa más proporcional
ya que la acción derivativa en el controlador responderá a los cambios bruscos en la medición que el mismo observa en el ruido. Esto causará variaciones rápidas y grandes en la salida del controlador, lo que hará que la válvula esté constantemente moviéndose hacia arriba o hacia abajo, produciendo un desgaste innecesario en la misma.
% de medicion
% de salida
�- -
--...
tiempo\, Proporcional /
'--
- - - -
____/ \ PD \/
Valor de consigna
,-
/
Figura 1.16: Acción Proporcional más integral más derivativa
existe un error, a pesar de que su contribución disminuye con el error. Además, la salida debido al valor proporcional está cambiando. Así, la medición retorna hacia el valor de consigna. Tan pronto como la medición alcanza el valor de consigna y deja de cambiar, la acción derivativa cesa nuevamente y la salida proporcional vuelve al 50%. Con la medición nuevamente en su valor de consigna, no existen más respuestas a variaciones debidas al reset. Sin embargo, la salida está ahora a un nuevo valor. El nuevo valor es el resultado de la acción de reset durante el tiempo en que la medición se alejó del valor de consigna, y compensa el cambio de carga que fue causado por la alteración original .
1.7.5 Acción Óptima
a) El Principio de Optimización
Para entender la idea de criterio de optimización en variable de estados, la introduciremos con sistemas de tiempo discreto, que son más simples y es como procederemos. El estado de un sistema discreto describe una trayectoria haciendo transiciones discretas de un estado a otro bajo el efecto de una entrada también aplicada en tiempo discreto. Cuando se asocia un criterio de optimización al sistema, cada transición de estado tiene asociado un costo o penalidad. Por ejemplo, pueden penalizarse las transiciones de estado que se alejan demasiado del estado final deseado, o las acciones de control de valores demasiado elevados. A medida que el sistema evoluciona de estado en estado, los costos se suman hasta acumular un costo total asociado a la trayectoria. Ilustramos el concepto con el gráfico de la Figura 1.17, que representa 8 estados de un sistema discreto con sus transiciones posibles. El estado inicial es el 1, y el final el 8. El sistema pasa de un estado a otro en cada tiempo k determinado por la entrada u[k] y las ecuaciones x[k + 1] = Ax[k] + Bu[k].
4 7
8
1
3
Las transiciones posibles se representan por los arcos que conectan el estado inicial al final a través de los estados intermedios. El costo asociado a cada transición se representa con la letra J; por ejemplo, el costo de moverse del estado 3 al 5 es J35. Asumiendo que los costos se acumulan en forma aditiva, vemos que la trayectoria de 1 a 8, por ejemplo, tiene un costo total J13 + J35 + J56 +J68. Como hay varias rutas alternativas del estado 1 al 8, el costo total dependerá de la trayectoria elegida. La señal de control u[k] que determina la trayectoria de menor costo es la estrategia óptima. Como ya veremos, en sistemas de tiempo discreto, la acumulación de costos se representa mediante suma. Y en tiempo continuo por integración.
Otra de las nociones que es muy importante en todo lo que hoy puede considerarse parte del ámbito de la teoría del control es la de "optimización". La optimización es una técnica que tiene como objetivo aumentar o mejorar el valor de una variable que, en la práctica, puede tomar las formas más variadas: temperatura, flujo de aire, velocidad, rentabilidad, beneficio, información, capacidad de destrucción, etc.
Las técnicas de optimización son tan variadas que resulta imposible hacer una presentación global y unificada de todas ellas. Por otra parte, la tecnología informática y de la computación han jugado un papel crítico en las aplicaciones de las técnicas de optimización, tal y como ocurre en el control óptimo de cohetes y proyectiles. En efecto, en vista de la complejidad de los sistemas a los que la Teoría del Control ha de aplicarse en la actualidad, es imposible realizar una implementación eficiente de los métodos de control, sin previamente realizar un riguroso trabajo de simulación numérica.
Dentro del amplio abanico de teorías, técnicas y problemas que podemos enmarcar en el contexto de la optimización cabe mencionar la teoría de juegos, la programación lineal y no lineal, la teoría del control, etc.
Después de un análisis debemos tener en cuenta los siguientes puntos:
• El valor correcto de los ajustes de banda proporcional, reset, y tiempo derivativo dependen de las características del proceso, cabe consignar que en los controladores actuales dichos valores se pueden detectar en forma automática, ya que el controlador dispone de un modo en que produce alteraciones controladas, y dentro de ciertos límites establecidos previamente por el operario, en la salida se miden los resultados del proceso para una cierta cantidad de ciclos de alteración, en base a este comportamiento se puede detectar cuál es el mejor conjunto de ajustes para controlar un proceso mediante el software interno del aparato.
• La función del modo reset (también llamado acción integral ) es para eliminar el offset. Si mucho valor de offset es usado el resultado será una oscilación de la medición cuando el controlador acciona la válvula de un extremo al otro. Si un valor muy bajo de reset es usado, el resultado será que la medición retorna al valor de consigna más lentamente que lo posible.
• El modo derivativo se opone a cualquier cambio en la medición. Una acción derivativa muy pequeña no tiene efecto significativo, una acción con valores muy altos provoca una respuesta excesiva del controlador y un ciclo en la medición.
1.8 Medidores de flujo y nivel
1.8.1 Medidor de flujo
El movimientos de fluidos por canales o conductos abiertos o cerrados y el caudal, cantidad de material en peso o volumen que fluye por unidad de tiempo, están presentes en todos los procesos de transporte de energía, dicha energía es usada bien sea para control de procesos o como simple indicación.
La mayoría de caudalímetros se basan en métodos de medida indirectos y en particular, en la detección de diferencias de presión provocadas por la inserción de un elemento en el conducto donde se desea medir. Para entender éste y otros métodos de medida de caudal es necesario repasar, siquiera brevemente, la teoría básica de flujo de fluidos.
Para un fluido incompresible, en el que la gravedad sea la única fuerza interna, esto es, sin rozamientos, que fluya en régimen estacionario y sin que entre ni salga calor de él, se cumple el teorema de Bernoulli. según éste, todo cambio de velocidad provoca un cambio de sentido opuesto en la presión, cambio que es igual al que experimenta la energía cinética de la unidad de volumen, sumado a cualquier cambio debido a diferencia de nivel.
Es decir:
v2
p+ p .g.z+
p.-
=constante 2donde:
p es la presión estática
p
es la densidad del fluido (incompresible)g es la aceleración de la gravedad
z es la altura geométrica respecto a un nivel de referencia
v es la velocidad del fluido en el punto considerado
v2
p.-
se denomina presión dinámica 2(1.19)
¡.. "t"h
1,
ho
)
...
Figura 1.18: Tubo Pitot canal abierto
.:����������������������==�==�==�:�::i
Puertas de toma a la presión estatica( Presion estática
Presión totai
Manómetro
Figura 1.19: Tubo de Pitot en canal cerrado. El manómetro mide la diferencia entre la presión total y la presión estática, y puede ser de tipo electrónico
El líquido penetra en el tubo y sube lo suficiente para que se equilibre la presión de la columna líquida con la fuerza producida por la velocidad al impactar el fluido en la abertura. Dado que enfrente de ésta velocidad nula, las líneas de flujo se "reparten", creándose un punto de estancamiento. Se cumple entonces:
(1.20)
y como al ser un canal abierto, p1 = p.g.h0 , se tiene finalmente:
En un tubo hay que medir la presión estática mediante un manómetro y en la figura 1.19, se hacen las dos medidas a la vez. A partir de ( 1.19) es fácil obtener la relación entre la velocidad y la diferencia entre presiones, que resulta ser:
v
2=2(Pi-p)/ p
(1.22)El tubo de Pitot es utilizado frecuentemente en aviación para medir la velocidad del aire.
Los caudalímetros de obstrucción son sin duda alguna los más frecuentes, y su funcionamiento se puede describir también a partir de ( 1.19). Se denomina obstrucción a una restricción de flujo de área constante. En ella se produce una caída de presión que depende del flujo, según se muestra seguidamente, de esta manera, la medida de caudal se reduce a una medida de presión diferencial.
Figura 1.20: Placa de obstrucción para la medida de caudal empleando un sensor de presión diferencial
Si a un conducto cerrado se interpone una placa con un orificio, hay una contracción de la vena fluida, que pasa de tener una sección transversal
A
1 (la del conducto) a una sección transversal Ai (la del orificio), figura 1.20, y ello lleva asociado a un cambio de velocidad. Dado que la masa se debe conservar:Por otro parte , la aplicación del teorema de Bernoulli lleva a
P
1+
pgz
1+
pv/ 12 =P
i+ pgz
2+
pv/
/2
Si z1 = z2 , a partir de estas dos expresiones se obtiene
(1.24)
(1.25)
El caudal teórico es Q = A2 .v2 , pero el caudal real es algo inferior y se determina calculando experimentalmente un factor de corrección, denominado coeficiente de descarga, Cd
,
que depende de A1 , Ai y otros factores. Su valor es del orden de 0.6. Se tiene así:(1.26)
1.8.2 Medidor de nivel
Para utilizar un medidor que se preste a la automatización, obtendremos una señal eléctrica mediante una conexión mecánica de un flotador que, en virtud del principio de Arquímedes, convierte el desplazamiento de la superficie libre en una fuerza o par, y éstos en un ángulo de giro (figura 1.21 a). Otra posibilidad es medir la diferencias de presiones l!.p entre el fondo del depósito y la superficie del líquido (figura 1.21 b ), la relación con la altura del líquido es:
h= óp
Figura 1.21 a: Medidor basado en flotador
L..'
Suministro de gas
Figura 1.21c: Medidor de burbujeo y medida de presión diferencial
donde
p
es la densidad del líquido y g la aceleración de la gravedad. Este método se puede aplicar tanto en depósitos abiertos como en depósitos cerrados a presión. En ambos casos, el desconocimiento exacto dep,
que depende del líquido y de latemperatura es una fuente de error. Las posibles fugas en la toma de presión cercana al fondo, son otro problema a considerar.
El método de la figura 1.21c, denominado de burbujeo, evita la medida de presión en el fondo del depósito. Consiste en un tubo inmerso hasta las proximidades del fondo, y por el que se hace circular un gas inerte a caudal constante que se ajusta hasta que se ven aparecer burbujas en el extremo del tubo. La presión en el tubo es igual entonces a la presión en la altura del depósito donde esta el extremo del depósito.
1.9 Utilización de Matlab y Simulink
Matlab y Simulink resultan poderosísimas herramientas para la simulación gran parte de los comandos son utilizados para el control del problema.
En Matlab debe definirse el numerador Y(s) y el denominador U(s) como vectores, cuyos elementos son los coeficientes de los polinomios del numerador y del denominador en potencias decrecientes de S. Por ejemplo, para definir la función de transferencia:
>>y=[1];
>>u=[1 0.25 1];
Para determinar la respuesta en el tiempo para una entrada escalón unitario de este sistema se usa el comando step indicando el vector del numerador y del denominador entre paréntesis: step(num,den)
>>step(y,u)
Puede definirse el tiempo en el cual se desea la respuesta al escalón, mediante un vector de tiempo T, step(num,den,T)
>>t=0:0.1 :20; >>step(y,u,t)
Se define t como un vector cuyo elemento inicial es O, su elemento final es 20 y existen elementos que son el incremento desde O hasta 20 de 0.1 en 0.1. Al ejecutar el comando step para y , u se obtiene en la ventana de figuras la respuesta escalón para los primeros 20 segundos.
Otra forma de definir el sistema en Matlab es usando las ecuaciones de estado de la forma:
x= Ax+Bu y= Cx + Du
Matlab permite hacer la conversión de una función de transferencia a su equivalente en ecuaciones de estado, mediante el comando tf2ss. Se deben especificar las cuatro matrices de estado de la forma:
[A,B,C,D]=tf2ss(num,den)
a= -0.2500 -1.0000
1.0000
o
b = 1
o
c=
o
1d=
o
Se puede hacer la conversión de una ecuación de estado a su equivalente función de transferencia, mediante el comando ss2tf. Se deben especificar los vectores para almacenar los coeficientes del polinomio numerador y del denominador. Su Sintaxis es: [num,den]=ss2tf(a,b,c,d)
Ejemplo
>>[num,den]=ss2tf(a,b,c,d) num =
O O 1.0000 den =
1.0000 0.2500 1.0000
Para obtener la respuesta escalón de un sistema a partir de las ecuaciones de estado se usa el comando step con la sintaxis: step(A,B,C,D)
Ejemplo
>>step(a,b,c,d)
Para obtener la respuesta en el tiempo para una entrada impulso unitario se usa el comando impulse, con Sintaxis idéntica a la utilizada con el comando step.
Si se define el sistema en Matlab por los polinomios del numerador y denominador de la función de transferencia tenemos:
» y=[1 5 4]; » u=[1 6 11 6]; » impulse(y,u)
» [A,B,C,D]=tf2 ss(y,u) A =
-6 -11 -6
1 O O
O 1 O
B = 1
o
o
e=
154D = O
» impulse(A,B,C,D)
En ambos casos, Matlab presenta la respuesta en el tiempo en !a ventana de figuras.
Matlab permite, además de obtener la respuesta en el tiempo para una entrada escalón o impulso, también obtener respuesta para otras entradas tal como rampas o sinusoides. El comando lsim permite obtener la respuesta en el tiempo para un sistema con una entrada u, donde u se define como una función del tiempo.
La Sintaxis de este comando es: lsim (A,B,C,D,U,T) usando las matrices de estado o lsim (NUM,DEN,U,T) usando la función de transferencia.
Para obtener la respuesta en el tiempo para una función rampa, se define U de la siguiente forma:
>>T=0:0.1:10 >>U=T;
>>NUM=[1];
>>DEN=[1 0.25 1];
>>[Y,X]=lsim(NUM,DEN,U,T);
>>PLOT(T,Y,T,U)
En la variable Y se almacena la salida del sistema en función del tiempo T. El comando plot permite presentar en la ventana de figuras la variable Y (salida) y la entra da U (rampa) en función del tiempo, obteniéndose:
Design linear-quadratic (LQ) state-feedback regulator for discrete-time plant
Sintaxis
Descripción
[K,S,e) = dlqr(a,b,Q,R) [K,S,e] = dlqr(a,b,Q,R,N)
[K,S,e] = dlqr(a,b,Q,R,N) calcula la óptima ganancia de la matriz K de retroalimentación
u[n]=-Kx[n] (1.28)
minimiza el costo de la función cuadrática
J (u) =
f (
x [ nr
Qx [ n] + u [ nr
Ru [ n] + 2x [ nr
Nu [n1)
11=1(1.29)
Para el tiempo discreto
x [ n +
1] =
Ax [ n] + Bu [ n] (1.30)Por defecto Matlab asume N =O cuando se omite en adición a la ganancia de retroalimentación K, dlqr retorna la solución G de la ecuación de Riccatti en tiempo discreto:
GT PG-P-CGTPH +N)(R+HTPHr1cHTPG+NT)+Q= o (1.31)
y el lazo cerrado autovalores e = eig(a-b*K). Notar que K es derivada de G. CR+HTPHr1cH
2.1 Estructura y descripción del proceso
El sistema de control de nivel de líquido que se dispone se muestra en la Fig. 2.1, que consiste de un depósito, alimentado en su parte superior a través de una válvula proporcional de apertura a(t) , accionada electromecánicamente por un voltaje de control
u
(t),
que será controlada para mantener el nivel de agua constante en el mismo, y a la salida una válvula de apertura/J(t)
. Los medidores de nivel (L T) y de flujo (MF)convierten a la altura del tanque
h(t)
y a la velocidad con que se llena,dh(t)
,en señalesdt
eléctricas Vh
(t)
y Vq(t)
respectivamente.q, (t)
.; ---
r---�
,6(t)
Siendo:
Abertura de la válvula de entrada
Abertura de la válvula de salida Caudal de entrada
Caudal de salida
Voltaje de control
Voltaje del nivel de líquido Voltaje de flujo
Nivel del líquido Área del tanque
2.2 Modelamiento del sistema en lazo abierto
2.2.1 Ecuaciones físicas
Tanque:
Figura 2.2 :Tanque
() -A dh(t)
q t -s --dt
Caudal de salida :
Figura 2.3: Válvula de salida (2.1)
a(t) /J(t)
q, (t)
qs (t)
u
(t)
vh (t) vq (t)
h (t)
Medidor de nivel (MT) :
vh (t) = h (t)
Caudal de entrada:
Ecuación diferencial derivada de la válvula neumática de entrada:
d a(t)
a.(t) + 25 -- = 0,225
u(t)
dtMedidor de flujo (MF):
Linealizando (2.2):
V (t) = k dh(t)q
dt donde k = 1
(2.2)
(2.3)
(2.4)
(2.5)
(2.6)
A continuación procederemos a evaluar la ecuación en el punto de equilibrio, Como sigue:
(2.7)
Para pequeñas variaciones alrededor del punto definido anteriormente tendremos:
donde:
an
an
ªºI
- qs(t)+- /J(t)+- h(t)=O
aqs o 8/J o ah o
qs(t)-kjh;[J(t)+ tJth(t)=O
qs(t) = k1/J(t)
kl =lk_¡¡;; 2
Despejamos (2.1) y (2.4 ):
q,(t) = A dh(t) dt + q/t)
a(t) =q,(t) 4
(2.8)
(2.9)
(2.1 O)
Derivando (2.1 O) y (2.11) tendremos
.
.. .
qe(t)
=
Ah{t)+ q5{l).
a(t)
=
qe(t) 4Reemplazando (2.11) y (2.13) en (2.5)
.
qe(t)
+
25qe(t)=
0.225.u(t)4
4
Reemplazando (2.1 O) y (2.12) en (2.15)
.
.. .
(2.12)
(2.13)
(2.15)
Ah+qs(t)
+25Ah+qs(t) =0.225.u(t) (2.16)
4
4
(2.9) en (2.16)
.
.. .
A h(t)+ q5 (t)
+
25A .h+ 25 q5 (t) = 0.9u(t).
..
.
A h(t)+ kJ3(t)
+
25A .h+ 25 k1 /J(t) = 0.9u(t).
••
h(t) O 9 k k•
h+-=-·-u(t)--1 /J(t)-_J_/J(t)
25 25A 25A A
.
••
h(t) O 9 k k•
h =--+-·-u(t)--1 f3(t)-_J_/3(t) (2.17)
25 25A 25A A
2.2.2 Ecuaciones de estado
Reemplazando
Derivando (2.18):
(2.18)
(2.19)
Reemplazando (2.19) en (2.20)
Derivando (2.19)
Reemplazando (2.17) en(2.22)
. .. .. .
x2
= h-a0 /J-a1 /3(2.21)
(2.22)
• 1 • O. 9 k¡ k¡ • •• •
x =--(x +a /J+a/3)+-u--/3 --/3-a /3-a /3 2 25 2 0 1 25A 25A A O 1 (2.23)
Se reduce a
Donde:
k¡
a =--
1A
1
0.9
x =--x +-u 2
25 2 25A
de (2.21) y (2.25}
Con /J(t)
=
O en (2.26) queda:l
ºl
[
º
l
l [
Xil
l
O
l
X 1
=
1
+0.9
u;2 O - 25 X2 25A
siendo A =1 ( área del tanque)
(2.25)
(2.26)
(2.28)
(2.29) Considerando que y= x1 va a ser nuestra salida del sistema, tenemos:
(2.30)
Entonces
(2.31)
Por lo tanto las matrices de espacio de estado en tiempo continuo son:
[
o1
l [
ol
Ac - Be
-O -0.04
0.036
Calculando la función de transferencia: num(s) =C (si-A )-1B +D
den(s) e e e e
Cc=[l o] Dc=[0]
0.036
= (modelo de la planta)
s(s +0.04)
(2.32)
(2.33)
Comprobando la función de transferencia con Matlab con el comando ss2tf. >> Ac=[O 1 ;O -0.04]
Ac=
O 1.0000 O -0.0400 >> Be=[ O ; 0.036]
0.0360
>> Cc=[1 O] Ce=
1 O
>> Dc=[O] De=
o
>> [num,den]=ss2tf(Ac,Bc,Cc,Dc) num =
den =
O 0.0000 0.0360
1.0000 0.0400 O
2.2.3 Controlabilidad y observabilidad del sistema
De la ecuación 2.32:
Hallando la matriz de controlabilidad. >> Mc=[Bc Ac*Bc]
Me=
O 0.0360 0.0360 -0.0014
>> rank(Mc)
ans =
2
%Es completamente controlable. Hallando la matriz de observabilidad
>> Nc=[Cc' Ac'*Cc']
Ne=
1 O
O 1
>> rank(Nc) ans =%Es completamente observable
2.2.4 Respuesta al escalón unitario en Matlab
El programa en Matlab que a continuación se presenta, permite obtener la respuesta en lazo abierto de nuestro sistema a una entrda escalón.
Programa:
t=-5:0.01 :5; q=size(t);
f=zeros( q( 1 ),q(2)); q=size(t(501:1001 ));
f(501: 1001 )=ones(q(1 ),q(2)); plot(t,f);
title('función escalón unitario'); axis([-5,5,-0.5, 1.5]);
xlabel('tiem po, t'); ylabel('u(t)');
grid;
funcion escalan
1.5 �--.-, ---.,---.----.----.---.--,--,----.---7 ' '
1 ----�---�----!----�---�1 1 :
'
'
- 1 1 1 1 ' ' ' '
'§' 0.5 - - - - , - - - -T - - -
----,---r----,---:---'
o 1---+---+---:---¿---;- - - :- - - : - - - -' '
' ' '
'
- -
--
-·-
-: li '
-0-�5L__ __ .1...4 ___ ..13 ___ 2.L...,--_...J..1_----::a�--;;-"71 ----;:2--,-�3�....,.,-4�.---;;5 tiempo,t
Figura 2.4: Escalón unitario
Be=[ O; 0.036];
Cc=[1 O]; Dc=[O];
step(Ac,Bc,Cc,Dc, 1 ); grid
title('respuesta a un escalón: entrada=u1'); ylabel('respuesta h(t)')
xlabel('tiempo en segundos')
200
150
10.0
1 1 1 1
1 � 1 ,.
-1 1
: : /�
' /,,/' ' /
1 1 1
/y
- - - � - - - � - - - -:- - - -7- � - - - -
.,,.,,, ':
:
: /
:
1 t
•/ 1
1 1 � 1
- - - � -1 -- - - �- -- - -
-/
_: _ - - - -:
- - ---: /
1 1
1 ./ 1 1
' /• ' '
1 / 1 1 1
50 - - - � - - - - -_.¿. � _, _ "'" -1
/ 1 1 1
1
: : :
,,,,.,,,. '
' '
-
---- 'o -=---'L.,---'---'---'---...J,
0 s0 100 ·tsó 200" r2'so
Figura 2.5: Respuesta al Escalón Unitario en lazo abierto del Sistema de Nivel del líquido
2.3 Simulación del proceso mediante simulink
DJ 1
0.036
1---i•.i s2+o .04s
1---·EI
Step Transfer Fcn Seo pe
Figura 2. 7: Gráfica en Simulink de la salida h(t) en lazo abierto
3.1 Simulación y Rediseño Digital
Es sabido que las computadoras digitales desempeñan una importante función en el análisis y diseño de sistemas de control retroalimentados. No sólo se utilizan para calcular y simular el desempeño del sistema de control; también sirven como controladores en línea de procesos. Puestos que los sistemas de control de datos continuos son los más comunes, y muchos sistemas de control contienen componentes de datos continuos, una práctica habitual es simularlos en una computadora digital.
El procedimiento para hallar un equivalente digital del controlador de datos continuos se conoce como rediseño digital. Si bien es posible diseñar un controlador digital de manera independiente, si ya hay un sistema de control de datos continuos con un desempeño satisfactorio, entonces lo más factible es encontrar un equivalente digital de él.
La simulación de sistemas de control de datos continuos en una computadora digital puede realizarse una vez que se aproxima la dinámica del sistema con una función de transferencia en el dominio z, o por ecuaciones de diferencias. En general, el análisis se efectúa en dos pasos.
• Representación del sistema de datos continuos por un modelo digital.
• Simulación del modelo digital en una computadora digital:
Es evidente que el modelo digital también puede estudiarse analíticamente. En general, el modelado digital puede realizarse con los métodos siguientes.
• Inserción en el sistema de datos continuos de dispositivos de muestreo y retención.
3.1.1 Simulación y Modelado Digital con Dispositivos de Muestreo y Retención
La manera más sencilla de aproximar un sistema de datos continuos con un modelo digital es insertando dispositivos de muestreo y retención en puntos estratégicos del sistema. Hecho lo anterior, el sistema puede describirse con funciones de transferencia en z como se muestra en la ecuación (3.1) o por ecuaciones de estado en diferencias; por ejemplo el sistema de datos continuos de la Fig. 3.2 puede aproximarse por el modelo digital de la Fig. 3.3. Los muestreadores ideales tienen un periodo de muestreo de T s, y el dispositivo de retención puede ser de cualquier tipo a juicio del analista, incluso puede tratarse de un retenedor poligonal que no es físicamente realizable pero que es aceptable por completo para fines analíticos. En la Fig. 3.3, Gh (s) denota la función de transferencia del dispositivo de retención; por tanto, la función de transferencia en z del modelo digital es
C(z)
=---�---
GhG(z)R(z) 1 + GhG(z)GhH1 (z) + GhG(z)GhH2 (z)
(3.1)
R(z) ... ¡._ __
a_
11_(z_) __ _:-.... .., C(z)Figura 3.1 : Función de transferencia en el modelo digital
r(t) G(s) c(t)
+
H1(s)
r(t) retenedor
G(s)
H1(s) retenedor
H2(s) retenedor
Figura 3.3 : Modelo digital del sistema de control de datos continuos con dispositivos de muestreo y retenciones ficticias
Donde:
GhG(z) = f[Gh (s)G(s)]
G1,H1 (z) = f[Gh (s)H1 (s)] GhH2 (z)= f[Gh (s)H2 (s)]
(3.2) (3.3) (3.4)
Aunque en principio el método de modelado digital descrito es sencillo y directo, existen dos consideraciones importantes para la selección del periodo de muestreo T. La primera tiene que ver con la exactitud y el tiempo requerido de la simulación digital. La segunda es que la selección del periodo de muestreo debe hacerse de modo que el sistema digital sea estable. De hecho, los dispositivos de muestreo y retención en general tienen afectos adversos sobre al estabilidad del sistema.
Como un ejemplo ilustrativo, considérese el sistema de datos continuos de la Fig. 3.2 La aproximación digital de este sistema puede obtenerse insertando un dispositivo de muestreo y retención en la trayectoria de retroalimentación, como se indica en la Fig. 3.3. La transformada z de la salida del modelo digital es:
Donde:
y
C(z) = RG(z) 1 + Gh0G(z)
RG(z) = e(R(s)G(s)]
(3.5)
(3.6)
(3.7)
r(t)
=
u(t)
k
+
l+
2s
Figura 3.4 : Sistema de control de datos continuos
r(t)
=
u(t)
k
+
1+2s
retenedor
Figura 3.5: Modelo digital de un sistema de control de datos continuos con dispositivos de muestreo y retención colocados en la trayectoria de
retroalimentación.
Para una entrada escalón unitario, la ecuación adopta la forma
RG(z)=f(
K
)= K(l-e--0.sT )z s{1+2s) (z-l)(z-e-05
T)
(1-e-Ts K
)
K(l-e--0.ST GhoG(z) = f1 2 = ( -05T)
s + s z-e
·
C(z) = (z -l)[z -e-o.sT + K(l -e-o.sT]
(3.8)
(3.9)
(3.10)
El periodo de muestreo T debe elegirse de modo que el sistema digital sea estable; por otra parte, T ha de ser tan pequeño que el sistema digital sea una buena aproximación del sistema de datos continuos original. La ecuación característica del sistema digital es:
z
-
e--0.sT + K(l- e-o.sT) = O (3.11)
La ecuación GhH1 (z) = f[Gh (s)H¡(s)] indica la región de estabilidad en el punto K-T.
2.2s. Para seleccionar el valor de T de modo que el sistema digital sea una buena aproximación del sistema de datos continuos, la frecuencia de muestreo ws > 20 * BW
7
6
5
K4
3 Inestable
2
2 3 4 5 6 7 8
T(segundos)
Figura 3.6 : Regiones estable e inestable y región donde del sistema de control digital de la figura 13
será al menos 20 veces mayor que el ancho de banda del sistema. Cuando K = I , el
ancho de banda del sistema de datos continuos es de 1 rad / s; por lo tanto, la frecuencia
de muestreo úJ5 será de por lo menos 20 rad / s, con lo cual el periodo de muestreo máximo Tes de 0.314s. Cuando K = 2 , BW = 1.49 rad / s; por consiguiente, el valor mínimo de OJ5es de 29.48 rad / s y el T máximo de 0.21s. La Fig. 3.6 muestra la región
del plano K-T donde la aproximación digital es buena. En general, el requisito de buena aproximación digital es mucho más restrictivo que el de estabilidad.
Suponiendo que el periodo de muestreo Tes
o/ios,
con K = I. Con esto, la ecuación(3.1 O) resulta en:
C(z) = 0.145z
(z -l)(z -0.709) (3.12)
La secuencia de salida c(kT) se obtiene al desarrollar C(z) en series de potencias mediante división larga. El resultado es :
C(z) = 0.145z-1 + 0.247z-2 + 0.32z-3 + 0.372z-4 + 0.409z-5 + 0.435z-6
+0.435z-1 +0.466z-8 +0.475z-9 +0.482z-10 +0.487z-11 +0.490z-12 (3.13)
El valor final de c(kT) es 0.5. La Fig. 3.7 ilustra la respuesta al escalón unitario del sistema de datos continuos y del sistema de control digital con K=1 y T=0.314s. La Fig. 3. 7 también contiene la respuesta al escalón unitario del sistema de control digital cuando K=1 y T=1 s. Como era de esperarse, la aproximación es inferior a la que se obtiene cuando T=0.314s. Para periodos de muestreo menores que 0.314s, las mejoras no son significativas, con lo que se justifica el costo asociado al empleo de una frecuencia de muestreo mayor.
Con ROC T=0.314s
Con ROC 0.5
,-._ 0.4
T=0.314s
0.3
0.2 Sistema de datos
continuos 0.1
o
o
2 3 4 5
Tiempo (segundos)
Figura 3. 7 : Simulación digital con el retenedor de orden cero y el retenedor poligonal.
Ahora suponiendo que el dispositivo de retención es un retenedor poligonal con función de transferencia dada por la ecuación:
Entonces,
eTs
-2
+
e-TsGhp(s)
=
Ts
ie[G,,(s)G(s)]= G,,G(z)
=
(z ;21>'
{,'(!� 2s) J (0.5T-1+
e-o.sr)z+ 1-(1 +
0.5T)e-0·5T =0.5T(z -e-o.sr)
La transformada z de la salida del modelo digital es:
C(z) = RG(z) l+GhpG(z)
0.5T(l -e---0.sr )z
=
(z-1)[ (T-1+
e-o.5T)z+
1-(1+
T)e-o.sr](3.14)
(3.15)