Sistema de laboratorios a distancia en el proceso de enseñanza aprendizaje de asignaturas de control
91
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Sistema de Laboratorios a Distancia en el proceso de enseñanzaaprendizaje de asignaturas de control Autor: Rolando Rodríguez Pons [email protected]. Tutor: MSc, Iván Santana Ching Departamento de Automática y Sistemas Computacionales Facultad de Ingeniería Eléctrica [email protected]. Ing, Yidier Rodríguez Pérez de Alejo Departamento de Automática y Sistemas Computacionales Facultad de Ingeniería Eléctrica [email protected] Santa Clara 2009 "Año del 50 aniversario del triunfo de l a Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Nunca consideres el estudio como un deber, sino como una oportunidad para penetrar en el maravilloso mundo del saber.. (Albert Einstein).
(5) ii. DEDICATORIA. A mis padres........................ Por apoyarme siempre a seguir hacia adelante. A mi abuela Anabel............ Por su amor incondicional todos estos años. A mis hermanas.................... Porque son las personas a las que más quiero. A mi tío Wilfredo............... Por ser como un segundo padre para mí. A mi familia en general.
(6) iii. AGRADECIMIENTOS. Este no es el momento de dejar personas excluidas, por eso de todo corazón le agradezco a todo aquel que de una forma u otra aporto su grano de arena para que se pudiera realizar este trabajo: A mi hermano Johan por tener paciencia conmigo y guiarme durante mi formación profesional. A mis compañeros de aula Lean por ser como un tutor para mi y a Víctor por dedicar parte de su tiempo a la revisión de este trabajo. A mis tutores Yidier Rodríguez Pérez de Alejo y a Iván Santana Ching, por servirme como guía en este momento. A Marlene por ser como una madre para mi. A todos mis compañeros de aula que de una forma u otra me ayudaron a llegar hasta aquí y compartieron conmigo estos cinco años. A mis amigos de siempre, por aceptarme como soy, acompañarme en mis logros y fracasos, celebrar mis alegrías, compartir mi dolor y tener su ayuda presente ante los problemas. A todos, muchas gracias….
(7) iv. TAREA TÉCNICA. 1. Búsqueda bibliográfica sobre laboratorios virtuales y remotos con énfasis en la parte pedagógica de los mismos. 2. Rediseño visual del Sitio Web. 3. Incorporación de herramientas educativas y de colaboración al SLD. Informes de prácticas, sistema de revisión de práctica, sistema de comentarios, autentificación de usuarios. 4. Diseño de nuevas prácticas para las asignaturas de la disciplina Sistemas de Control I en la UCLV y Regulación Automática I en la UPM de España. 5. Organización de los contenidos del sitio, prácticas, páginas de teoría, etc. 6. Evaluación y resultados del SLD con las herramientas incorporadas. 7. Redacción del informe final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En la actualidad, los laboratorios remotos y a distancia constituyen una solución idónea para un conjunto de colectivos que exigen disponer de sistemas de enseñanza mucho más flexibles, accesibles y adaptables. Resulta incuestionable que las nuevas tecnologías de la información se presentan como una de las formas alternativas para mejorar la interacción profesor-alumno que ocurre en estos sistemas. En la Universidad Central “Marta Abreu” de la Villas se desarrolló en años pasados un Sistema de Laboratorios a Distancia (SLD) con el objetivo de mejorar el proceso enseñanza aprendizaje de las asignaturas de Automática. Este trabajo esta encaminado a incorporar adecuadamente herramientas educativas y colaborativas que permitan al SLD brindar un servicio con mayor flexibilidad de horarios y una mayor y mejor explotación de los recursos disponibles.. Para ello se realizó un análisis de otros laboratorios existentes en el mundo con el objetivo de determinar las posibles herramientas a incorporar. Para facilitar los cambios se rediseñó el ambiente visual del sitio del laboratorio y se desarrollaron y modificaron prácticas con vistas a optimizar el SLD. Por último, con la intención de evaluar y validar el uso del sistema con los nuevos servicios incorporados, se realizaron varias pruebas de funcionamiento y una encuesta para ver el impacto que causaron los cambios en los estudiantes..
(9) TABLA DE CONTENIDOS PENSAMIENTO ....................................................................................................................i DEDICATORIA ................................................................................................................... ii AGRADECIMIENTOS ....................................................................................................... iii TAREA TÉCNICA ...............................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN ................................................................................................................ 1 CAPÍTULO 1.. Laboratorios Virtuales y Remotos. Implicaciones en la docencia. ............. 4. 1.1. Introducción .......................................................................................................... 4. 1.2. Hacia una Definición de Educación a Distancia .................................................. 5. 1.2.1. Distancia Física ................................................................................................. 6. 1.2.2. Distancia Psicológica ........................................................................................ 6. 1.2.3. Aspectos de la Distancia Transaccional............................................................ 6. 1.3. Laboratorios Remotos a Distancia........................................................................ 7. 1.4. Apreciaciones del Capítulo................................................................................. 20. CAPÍTULO 2.. Prácticas docentes con el Sistema de Laboratorios a Distancia. ............... 22. 2.1. Introducción. ....................................................................................................... 22. 2.2. Diseño del SLD. ................................................................................................. 22. 2.2.1. Analisis del Sitio Existente. ............................................................................ 22. 2.2.2. Diseño Web del Sitio Nuevo. ......................................................................... 23. 2.2.3. Herramientas utilizadas para el Diseño. ......................................................... 25. 2.3. Herramientas Pedagógicas Incorporadas. ........................................................... 25. 2.3.1. Sistema de Autentificación. ............................................................................ 25. 2.3.2. Revisión de Prácticas. ..................................................................................... 26. 2.3.3. Sistema de Comentarios.................................................................................. 26. 2.4 2.4.1. Guías para la realización de las prácticas de laboratorio. ................................... 27 Influencia de las acciones de control en el comportamiento de la respuesta. transitoria de un sistema de segundo orden. ............................................................... 27 2.4.2 2.5 2.5.1. Diseño de Reguladores. .................................................................................. 29 Prácticas con el SLD. ......................................................................................... 30 Identificación de los parámetros Km y Tm del Motor de DC. ........................ 30.
(10) 2.5.2. Prácticas a Desarrollar. ................................................................................... 30. 2.5.3. Modificaciones de las prácticas ya existentes................................................. 33. 2.6. Estándar de prácticas. ......................................................................................... 33. 2.6.1. Estándar de prácticas con controlador predefinido. ........................................ 34. 2.6.2. Estándar para prácticas con controlador definido por el usuario. ................... 35. 2.7. Apreciaciones del Capítulo................................................................................. 38. CAPÍTULO 3.. Resultados del uso del Sistema de Laboratorio a Distancia ..................... 39. 3.1. Introducción ........................................................................................................ 39. 3.2. Ejecución de la práctica de control de un sistema térmico con un regulador PID 39. 3.3. Resultados de la Encuesta .................................................................................. 43. 3.4. Impacto Social y Análisis Económico ................................................................ 47. 3.5. Apreciaciones del Capítulo................................................................................. 48. CONCLUSIONES Y RECOMENDACIONES ................................................................. 49 REFERENCIAS BIBLIOGRÁFICAS ................................................................................ 50 ANEXOS .............................................................................................................................. 54 Anexo I: Manual de Usuario del SLD. ............................................................................ 54 Anexo II: Guías de Ejercicios para las Prácticas en la Asignatura de Sistema de Control I 62 Anexo III: Código estándar de los ficheros *.m de las prácticas. .................................... 68 Anexo IV: Especificaciones de la Maqueta del Sistema Térmico ................................... 81.
(11) INTRODUCCIÓN. INTRODUCCIÓN. Los laboratorios remotos y a distancia hoy día juegan un papel muy importante en la realización de prácticas con equipos reales. En (Candelas Herías et al., 2003) se manifiesta que en estos laboratorios remotos los estudiantes puede analizar los resultados obtenidos y discutir varias vías de solución de ejercicios con otros estudiantes como si estuvieran físicamente presentes en el laboratorio. Pueden acceder a ellos en cualquier momento del día y de cualquier lugar en que se encuentren, por lo que presentan gran flexibilidad.. Estas prácticas reales y simuladas realizadas en estos laboratorios son necesarias e imprescindibles en la formación de ingenieros. Proporcionan valiosas oportunidades de aprendizaje a los estudiantes, difícil de reproducir a través de otras técnicas de enseñanza. En ellas los estudiantes tienen la oportunidad de ilustrar y validar el conocimiento recibido anteriormente en clases, introduciéndose a la práctica profesional. También les permite adquirir una visión de los problemas prácticos, haciendo frente a las incertidumbres que pudieran tener en su futuro desempeño como ingenieros(Lindsay, 2005),(Adiego, 2008).. En la actualidad son varios los ejemplos de laboratorios virtuales y remotos en el mundo. El grupo de educación en Automática del Comité Español de Automática según se informa en (DORMIDO, 2009b), desarrolló un proyecto llamado AutomatL@bs, que es una red de laboratorios virtuales/remotos para la enseñanza de. 1.
(12) INTRODUCCIÓN. la automática que se constituye mediante la integración de los recursos que aportan los grupos que participan en el proyecto.. Otro ejemplo es el Laboratorio Remoto de Automática de la Universidad de León tiene acceso a equipos industriales, como una planta piloto para la realización de experiencias de control de operación y supervisión remota, maquetas de procesos de control sobre variables de nivel, caudal, temperatura, etc. (Domínguez et al., 2005). También está el sistema de laboratorio virtual y remoto del Departamento de Informática y Automática de la Universidad Nacional de Educación a Distancia (UNED) de España en el cual se hace uso del Easy Java Simulations (EJS). Este sistema tiene disponible tres plantas didácticas, el sistema heatflow, el sistema de tres tanques y un motor de corriente continua.. En (Gravier et al., 2008) los autores hacen una valoración de cuáles son las características que deben tener los laboratorios remotos futuros, haciendo especial hincapié en la reutilización, la interoperabilidad y la integración con herramientas de aprendizaje colaborativo.. Situación del problema. En la actualidad el Sistema de Laboratorios a Distancia (SLD) desarrollado por el Dpto. de Automática y Sistemas Computacionales de la Universidad Central “Marta Abreu” de Las Villas no cuenta con herramientas educativas que faciliten el trabajo de estudiantes y profesores. Esto provoca una menor utilización del sistema y limita el proceso de enseñanza aprendizaje.. Hipótesis. Si se incorporan herramientas educativas y colaborativas al SLD se mejorará el proceso de enseñanza aprendizaje de las asignaturas de Control en la carrera de Ingeniería en Automática.. 2.
(13) INTRODUCCIÓN. 3. Objetivo general: Dotar al SLD de herramientas educativas que permitan un mejor desempeño del mismo en el proceso de enseñanza aprendizaje.. Objetivos específicos: 1. Analizar otros laboratorios virtuales y remotos para ver su impacto en la docencia. 2. Evaluar las herramientas educativas y de colaboración posibles a incorporar al SLD. 3. Incorporar herramientas educativas y de colaboración al SLD 4. Incorporar nuevas prácticas al SLD ampliando su campo de acción. 5. Evaluar el uso del SLD.. Organización del informe El informe está conformado con un primer capítulo en donde se realiza un estudio sobre aspectos fundamentales de la educación a distancia, así como una revisión de otros laboratorios implementados en el mundo con vistas a determinar los aspectos positivos de cada uno de ellos para incorporarlos al nuestro.. En el segundo capítulo se abordan los aspectos relacionados a los cambios visuales del SLD, así como lo referente a la incorporación de nuevas prácticas y herramientas educativas al sistema. Por ultimo se presenta un estándar para la programación de los ficheros .m para facilitar la creación de nuevas prácticas.. En el capítulo tres se realiza una evaluación y validación del uso del SLD, realizando pruebas a las prácticas realizadas y encuestas a los estudiantes para valorar el uso del SLD así como el impacto de las herramientas incorporadas.. El trabajo termina con unas conclusiones, recomendaciones, referencias bibliográficas y anexos..
(14) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 4. CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 1.1. Introducción. En la sociedad actual, los laboratorios remotos y a distancia se presentan como la solución idónea que permite disponer de sistemas de enseñanzas mucho más flexibles, accesibles y adaptables. Resulta incuestionable que las nuevas tecnologías de la información se presentan como las formas alternativas de mejorar la interacción profesor-alumno. Dentro de todo el conjunto de nuevas tecnologías, destacan dos herramientas como las más adecuadas para ofrecer un nuevo enfoque en el modelo educativo de la educación a distancia: los sistemas hipermedia como forma de estructurar la información, y las redes de comunicación de área extendida como soporte de la información, es decir, la red Internet (Dormido and Torres, 2005).. Como se expone en (Candela and Sánchez Moreno, 2005), (Gasa et al., 2005) y (Hites, 2002) el alto costo de los equipos y del mantenimiento de estos laboratorios son factores que impiden la fácil adquisición e implementación de los mismos. Debido a esto un gran número de universidades en todo el mundo están enlazando y compartiendo laboratorios remotos, según se plantea en (Vázquez Serrano and Jiménez Hornero, 2008). Esto ofrece a los estudiantes la oportunidad de suscribirse no sólo a los laboratorios que hay en una sola universidad sino que puedan experimentar con un gran número de dispositivos que se encuentran compartidos a través de estas redes de laboratorios remotos..
(15) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 5. En este capítulo abordaremos los aspectos principales del proceso de educación a distancia, de manera que nos acerquemos a su definición. Así como realizar un análisis de otros laboratorios de la misma índole, siempre enfocado en la implicación que estos tengan en la docencia.. 1.2. Hacia una Definición de Educación a Distancia. Cuando se habla de laboratorios virtuales y remotos es preciso conocer sobre el proceso de educación a distancias, el cual ha existido desde hace mucho tiempo. Actualmente este se ha mejorado con el surgimiento de las redes de comunicaciones, haciendo posible que gran cantidad de materiales con diferentes formatos puedan estar disponibles para muchos usuarios.. La definición estándar de Educación a Distancia es la proporcionada por Keegan y citada en (Lindsay, 2005), aquí se articulan cinco elementos clave de la educación a distancia.. 1. La casi permanente separación del profesor y el estudiante a través de la duración del proceso de aprendizaje. Esto la distingue del proceso presencial convencional. 2. La influencia de una organización educativa tanto en la planeación y preparación de materiales de aprendizaje como en la provisión de servicios de soporte al estudiante. Esto la distingue del estudio privado y de los programas de autoenseñanza. 3. El uso de medios técnicos como, información digital, audio, video o computador, todo para unir al profesor y al estudiante y llevar el contenido del curso. 4. La provisión de comunicación de doble vía de tal manera que el estudiante pueda beneficiarse de tal comunicación o hasta iniciar un diálogo. Esto la diferencia de otros usos de la tecnología en educación. 5. La casi permanente ausencia de grupos de aprendizaje mediante la duración del curso. Esto implica que la enseñanza se dirige a las personas como individuos y no como grupos, con la posibilidad de encuentros ocasionales ya sea para propósitos didácticos o para propósitos de socialización..
(16) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 6. 1.2.1 Distancia Física El primer punto es de la separación entre el alumno y el maestro, es el elemento esencial de La Educación a Distancia que aparece en la mayoría de sus definiciones. "Los estudiantes están físicamente separados de la institución que patrocina la instrucción"; educación a distancia implica una separación en el tiempo y espacio, siendo el elemento clave para la definición de Educación a Distancia. Además de ser un atributo necesario de la educación distancia, la separación es también el gran desafío que hay que superar.. 1.2.2 Distancia Psicológica Aunque la separación física es un elemento clave de la educación a distancia, se acepta a la distancia psicológica entre el estudiante y el profesor como otro elemento de suma importancia. Una teoría que ha sido desarrollada para esta medida de separación psicológica es la planteada por Moore y citada también en (Lindsay, 2005) como teoría de la Distancia Transaccional.. 1.2.3 Aspectos de la Distancia Transaccional Moore, amplió las ideas relativas a la autonomía tratando de calificar los factores que afectan a la autonomía de los alumnos en la educación a distancia, lo que condujo a la elaboración de la teoría de la distancia transaccional. La distancia transaccional de un curso de educación a distancia es una medida de la proximidad psicológica entre el alumno y el instructor. Hay tres aspectos fundamentales en la distancia transaccional: el Diálogo, la Estructura y Autonomía.. Diálogo El diálogo se define como la capacidad de interacción significativa entre profesor y alumno, no tiene por qué ser cara a cara, ni instantáneo. El diálogo es simplemente la interacción entre las partes, el mismo requiere de una interacción "útil, constructiva y con un valor para cada una de las partes". A través de la manipulación de los medios de comunicación se puede aumentar el diálogo entre los alumnos y profesores, permitiendo reducir la distancia transaccional..
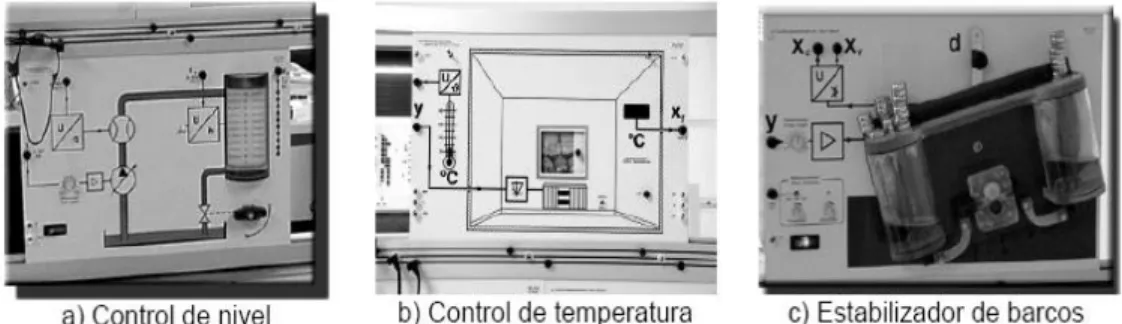
(17) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 7. Estructura Según Lindsay se define a la Estructura como el factor que limita las interacciones entre alumnos y docentes durante un curso, esta es la medida en que un programa de educación se puede acomodar a cada alumno y responder a sus necesidades individuales. Existen una serie de factores que pueden afectar a la estructura de un curso, los mismos son estrategias de enseñanza, métodos de evaluación, limitaciones impuestas en la universidad, las personalidades de los profesores y los alumnos. Uno de los factores más influyentes para la determinación del grado en que un curso es estructurado lo constituye el medio de comunicación que se emplea para facilitar el curso.. Aprendizaje Autónomo Moore en 1972 se refiere a la importancia de la autonomía de los alumnos, desafiando el paradigma dominante de que toda la responsabilidad por el control del proceso de aprendizaje era del maestro residido. Este cambio de filosofía marcó una nueva tendencia en los últimos 35 años, en la misma el profesor dejó de ser el eslabón principal del proceso de aprendizaje y el lugar principal lo ocupó el alumnado. Cursos con una mayor distancia transaccional requieren de un mayor grado de autonomía por parte del alumno para su mejor asimilación.. 1.3. Laboratorios Remotos a Distancia.. A continuación se presentan una serie de trabajos relacionados con el desarrollo de laboratorios remotos para la realización de prácticas, los mismos están orientados a mejorar la enseñanza en la carrera Ingeniería en Automática. Estos trabajos serán analizados en función de conocer las herramientas educativas y colaborativas que usan.. En este punto del trabajo se muestra la plataforma de experimentación remota LABNET (Laboratorio remoto para control de procesos) planteado en (Aliane et al., 2007), (Aliane, 2008) y (Aliane et al., 2008). En esta plataforma se realizan experimentos relacionados con el control sobre tres maquetas (ver figura.1.1)..
(18) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 8. Los experimentos se definen a continuación.. 1. Control de nivel. 2. Control de temperatura. 3. Control de un sistema de estabilización de barcos.. Figura 1.1: Las Maquetas de la plataforma LABNET.. El sistema ofrece la posibilidad de realizar una gama extensa de experimentos de control en lazo abierto o en lazo cerrado utilizando controladores predefinidos. Estos experimentos recogen los aspectos más importantes de los PID industriales.. Los controladores predefinidos de LABNET son tres variantes del PID. El PID teórico. El PID con filtrado de la derivada. El PID con Anti-Windup.. También se puede realizar otro tipo de estudios como el efecto del periodo de muestreo sobre el sistema o el efecto de los retardos de transmisión sobre la realimentación.. Presenta ventajas en comparación con otros sistemas, tales como la posibilidad de controlar varias maquetas de forma concurrente, posibilidad de experimentar una acción de control local o remota, generación de informes o la reutilización de plantillas, la.
(19) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 9. posibilidad de comentar las prácticas y la observación de videos en tiempo real de la respuesta de los equipos.. Los profesores que aplicaron este método para la realización de los laboratorios ofrecieron la siguiente conclusión.. En general, los alumnos que optaron por la experimentación remota mostraron una actitud positiva y han manifestado que el sistema es sencillo y amigable. Esto demuestra que un entorno de experimentación remota es factible y que los alumnos se adaptan rápidamente a un escenario educativo que implique su utilización. Se puede concluir que el manejo del cliente de LABNET no ha supuesto ninguna carga adicional de aprendizaje, y que su uso ha sido con más naturalidad de los que se esperaba.. Otro ejemplo de sistemas de laboratorios es el Laboratorio remoto a distancia para prácticas de regulación, este sistema es el resultado de un proyecto para mejorar la calidad docente desarrollado en el curso 2007/2008 por La Universidad de Córdoba, dirigido por Francisco. J. Vázquez Serrano.. Según se describe en (Vázquez Serrano and Jiménez Hornero, 2008) el laboratorio remoto fue desarrollado como complemento para la docencia, beneficiando al los estudiantes con sus ventajas, en especial el uso del laboratorio en horarios libres mientras se disponga de una conexión a Internet. Por otro lado, el proyecto completa el concebido durante el curso 2006/2007, en el que se desarrollaron herramientas para prácticas completamente presenciales, siguiendo la pauta tradicional.. El laboratorio dispone de diferentes grados de realimentación para los estudiantes, como gráficas temporales de los resultados, visualización de la evolución de la planta (ver figura 1.2) en tiempo real a través de una cámara Web de forma que pueda observar y comparar el comportamiento del sistema con diferentes diseños de controladores y un forum con el objetivo de permitir discutir sobre los resultados obtenidos, así como de nuevas estrategias de soluciones..
(20) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 10. En esta plataforma también se propone un conjunto de prácticas para la sintonía de controladores PID según las especificaciones que se soliciten, de forma tal que refuercen los conceptos analizados en las clases teóricas y lo familiaricen con el manejo de instrumentos y equipos empleados en situaciones reales. Así mismo se presentan prácticas de identificación en las que los datos experimentales necesarios se extraerán usando el laboratorio remoto desarrollado, de forma que los alumnos puedan obtener el modelo de la planta directamente a partir de estos datos.. Figura 1.2: Planta de la plataforma.. En la siguiente ventana, el usuario puede realizar experimentos en lazo cerrado usando controladores PID, cuyos parámetros característicos puede introducir en los campos correspondientes (ver figura1.3). De esta forma puede configurar como entrada un escalón de consigna o un tren de escalones (mediante la introducción directa de datos o a través de un fichero), incluso en torno a un punto de operación determinado..
(21) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 11. Figura1.3: Ventana para poner los parámetros del regulador. El Grupo de Automática, Robótica y Visión Artificial del Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal de la Universidad de Alicante ha creado un laboratorio remoto (RobUALab.Ejs), que es uno de los laboratorios incluidos en el proyecto AutomatL@bs, según (DORMIDO, 2009a) es una red de laboratorios de la cual forman parte varias universidades españolas.. Como se describe en (Jara Bravo et al., 2007), (Jara et al., 2008), (Candelas, 2009) y (Jara et al., 2009), el laboratorio se desarrolló con el objetivo de crear y distribuir simulaciones para su uso pedagógico en la enseñanza de la física y carreras a fines con estas prácticas. En este el usuario tiene que autentificarse en AtomatL@bs antes de realizar prácticas reales, en caso de estar ocupado el sistema, puede reservar prácticas para otro momento mediante un sistema de reservas de prácticas que fue implementado. Los usuarios mediante un applet desarrollado con Ejs (Easy Java Simulations), son capaces de simular y teleoperar un robot tipo Scorbot ER-IX (de Intelitek) a través de Internet teniendo tan sólo instalado en su PC la máquina virtual de Java (Java Virtual Machine) y un explorador Web. Puede mover el robot mediante controles articulares dando valores a cada una de las.
(22) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 12. articulaciones del robot, o mediante controles cartesianos dando valores a los puntos (X, Y, Z).. La aplicación permite al usuario poner en práctica conceptos como la cinemática directa, inversa y planificación de trayectorias, para esta última opción la aplicación posibilita simular trayectorias articulares de tipo síncrono y asíncrono. Además, estas trayectorias pueden ser guardadas en una lista y ejecutarlas todas a la vez creando una trayectoria formada por varios puntos intermedios. Mediante esta herramientas para la docencia a distancia de robótica industrial, el alumno puede simular y tele-operar robots industriales y analizar sus respuestas mediante un flujo de video comprimido que se transmite de forma online al ordenador del usuario y recibida del controlador del robot sobre sus posiciones articulares reales (Ver figura 1.4). El empleo de este laboratorio permite al alumno ser adiestrado de una manera rápida y económica. Estando preparado para afrontar y resolver los problemas de los complejos dispositivos robóticos.. Figura 1.4: Opciones de realimentación.. Otro sistema de laboratorio es el “Laboratorio de Control Remoto del Sistema “Ball & Hoop”, presentado en (Calvo et al., 2008) y (Calvo et al., 2009), es un laboratorio para un curso básico en ingeniería de control que intenta maximizar el uso de una única planta, un.
(23) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 13. sistema de bola y aro (ver figura 1.5). Fue propuesto por el Prof. Wellstead cuando estudiaba el control de las oscilaciones de un líquido en un container que se mueve y que cambia de velocidad y dirección. Se plantea que el sistema “Ball & Hoop” esta compuesto de los siguientes elementos.. 1. Un aro que puede rotar con una bola de acero en el perímetro interior. 2. Un servomotor, M, que puede mover el aro y controlar el ángulo mediante el par del motor, τ(t). 3. Un censor del ángulo del aro, θ. 4. Un censor para el ángulo de la bola de acero dentro del aro, el ángulo,ψ.. Figura 1.5: Fotografía del sistema “Ball & Hoop”.. Es preciso saber que un sistema “Ball & Hoop” no deja de ser un motor DC con una carga cuyo comportamiento es muy especial. Esta aplicación remota permite a los usuarios los siguientes experimentos.. 1. Obtener un modelo experimental del motor DC. 2. Control de velocidad del motor DC. 3. Control de posición del motor DC. 4. Análisis de la resonancia y de los ceros de transmisión..
(24) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 14. En la primera práctica para obtener el modelo del motor (ver figura 1.6) se debe estimar la ganancia del motor G, la constante de tiempo T y la ganancia de taco H. Estos coeficientes se estiman de forma experimental mediante diversos experimentos con el mismo sistema.. Figura 1.6: Modelo del Motor DC. La segunda consiste en sintonizar un regulador PID. Aquí los alumnos previamente deben calcular los mejores valores para el bloque PID, simular el comportamiento de la planta con estos valores y validar los resultados obtenidos en la simulación con los obtenidos experimentalmente. Además, los alumnos pueden comparar el comportamiento de la planta, cuando el sistema se opera en lazo abierto (ver figura 1.7a) y cuando se opera en lazo cerrado con un regulador PID (ver figura 1.7b) a través de un sistema de visualización de graficas que presenta como una herramienta de ayuda a las prácticas.. a). b) Figura 1.7: a) Opera en lazo abierto. b) Opera en lazo cerrado.. En el tercer experimento una vez que el regulador de velocidad ha sido sintonizado, un nuevo lazo de control es introducido, un lazo de posición. El nuevo regulador PID debe ser sintonizado minimizando el tiempo de establecimiento y el sobre impulso (ver figura 1.8)..
(25) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 15. Considerando que el par producido por la bola no afecta apenas a la dinámica del aro, este experimento es básico para simular el movimiento del líquido dentro del container sin regulador alguno. Las oscilaciones medidas por el ángulo (ψ) son análogos a este movimiento.. Figura1.8: Sintonización del control de posición. Los experimentos que se pueden realizar en este laboratorio recogen un amplio abanico de problemas con diferentes grados de dificultad. Además, el sistema a controlar resulta interesante debido a que presenta una gran similitud con un problema real en el estudio de las oscilaciones de un líquido en el interior de un container. Por otra parte permite estudiar una serie de algoritmos de control ligados a los sistemas de secado por centrifuga, en el que el objetivo es mejorar el secado haciendo que las resonancias del sistema no sean excitadas. En el artículo “System Control Through the Internet and a Remote Access Laboratory Implementation” presentado por (Doğan and Erdal, 2008) se utiliza una planta RT-512 (Ver figura 1.9), desarrollada por la compañía GUNT, en el laboratorio remoto (RACL) con el objetivo de que los estudiantes realicen experimentos reales y remotos. El RT-512 ofrece la posibilidad de estudiar los principios del control de procesos a través de un sistema de regulación de nivel. El principal propósito del experimento es mantener el nivel de agua en el punto deseado..
(26) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 16. Figura 1.9: Planta RT 512.. El software de control posibilita al usuario hacer experimentos en la planta RT512 para el aprendizaje de los algoritmos básicos de control como control manual (lazo abierto), Control On-Of y Control PID. Un usuario puede hacer experimentos cambiando el algoritmo de control y sus parámetros, obteniendo los resultados mediante gráficos online a través de Internet, así como videos en tiempo real mediante una Web Cam. Puede verse que las herramientas educativas de visualización de graficas, videos y prácticas de sintonización de controladores aquí implementadas, convierten a este sistema en un complemento importante en la enseñanza del control de proceso. En el trabajo “Plataforma Distribuida para la Realización de Prácticas de Robótica Móvil a través de Internet” descrito por (Payá et al., 2007), se presenta una plataforma distribuida que permite a los alumnos acceder a través de Internet a los robots disponibles en el laboratorio. Mediante esta plataforma se crea un entorno remoto con el que los estudiantes pueden llevar a cabo diferentes experimentos sobre varios equipos con un horario flexible. Los usuarios en este sistema pueden crear algoritmos básicos de control reactivo y de robótica colaborativa y probarlos sobre plataformas robóticas reales, vinculando la teoría con la práctica..
(27) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 17. Se dispone de cuatro modelos diferentes de robots móviles (Ver figura1.10).. Figura 1.10: Robots utilizados en la plataforma. (a) B21r, (b) WiFiBot, (c) EyeBot y (d) RugWarrior.. En las prácticas aquí expuestas se utilizó principalmente el robot WiFiBot, debido a su tamaño, versatilidad y capacidad de procesamiento a bordo, abarcando distintos campos de conocimiento dentro de la robótica móvil. Para complementar las prácticas se brinda la información necesaria sobre los robots disponibles y los servicios de que dispone cada uno de ellos. Así mismo, se ponen a disposición de los estudiantes diversas plantillas y ejemplos que muestran el formato de utilización de los métodos implementados (lectura de censores, captura de imágenes y control del robot) siendo una herramienta de apoyo para la ejecución de las prácticas. Estos ejemplos permiten al alumno introducirse en el manejo del equipo, creación del programa, descarga, compilación, etc. Además presenta un sistema de realimentación con Webcam de forma tal que vean el resultado de cada práctica y comprobar si el objetivo de la práctica se cumplió.. Las prácticas propuestas son: . Control reactivo del robot mediante coordinación competitiva. El alumno debe implementar un programa con el objetivo de mover el robot desde un punto inicial hasta un punto final, evitando varios obstáculos (Ver figura 1.11) durante el recorrido hasta el destino. De este modo, se pretende que el alumno resuelva el problema mediante un control reactivo del robot y que llegue a su destino evitando el obstáculo..
(28) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 18. Figura 1.11: Entorno por el que se mueve el robot para la práctica uno.. . Comparación odometría – posición real. El objetivo que se cumple aquí es comparar los datos de trayectoria proporcionados por la odometría con la trayectoria real del robot. Calcular la orientación necesaria hacia el punto de destino.. . Control reactivo mediante coordinación cooperativa.. Aquí se plantea una. plantilla formada por cinco puntos negros situados en los vértices y en el centro de un cuadrado (ver figura 1.12). Se trata de que el alumno consiga que el robot se mueva sobre si mismo hasta que localice dicha plantilla a partir del sistema de visión embarcado y en ese momento tienda hacia ella situándose a cierta posición relativa y orientándose respecto a la misma.. Figura 1.12: Entorno por el que se mueve el robot para la práctica tres.. . Creación de una base de datos visual del entorno. El objetivo de esta práctica es crear una base de datos con imágenes desde varios puntos del entorno, comprimiendo esta información. Posteriormente, se debe realizar una localización.
(29) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 19. topológica dentro del entorno, proyectando la imagen actual en la base y comprobando cual de las almacenadas en la base de datos es la más cercana.. Con esta plataforma los estudiantes pueden probar los algoritmos que diseñan sobre equipos reales y puede acceder a todos los servicios que ofrecen los robots, aprovechando las ventajas que tiene la educación a través de Internet. La plataforma ACEL-WebLab presentada en (Naumović and Živanović, 2008) realiza tres tipos de experimentos en los cuales los alumnos pueden cambiar parámetro de control y analizar los resultados obtenidos.. 1. Experimentos para el control de velocidad de servos sistemas. 2. Sistema de control de Levitación Magnética en modo analógico. 3. Sistema de control de Levitación Magnética en modo digital.. El experimento de control de la velocidad esta formado por varios elementos: un Motor AC, un tacómetro, un amplificador de potencia, un modulador, un demodulador, un compensador y un detector de errores. Todos estos elementos son diseñados de forma individual pero con la posibilidad de interactuar en forma de cascada (ver figura 1.13). Figura 1.13: Fotografía del sistema de control de velocidad.
(30) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 20. El objetivo en esta práctica es controlar la velocidad del motor AC mediante la variación del voltaje de alimentación. Los alumnos obtienen la velocidad real a través de la señal que proporciona el tacómetro, pudiendo realizar ajustes en el set point del sistema.. También se plantea que el proceso de levitación magnética es altamente motivador y adecuado para experimentos de laboratorio y demostraciones en el aula, desde el punto de vista educativo. Un equipo de laboratorio portátil para experimentos clásicos de control de levitación magnética se presenta en la figura 1.14.. Figura 1.14: Fotografía del equipo para el experimento de Levitación Magnética. En esta sección los usuarios pueden introducir nuevos valores en los parámetros a través de una interface realizada en LabVIEW moviendo el set point logrando la elevación deseada de la bolita que tiene unos 20 g de masa. Todo estos resultados son realimentados a los usuarios a través de un video que es capturado por una Webcam, siendo de gran importancia a la hora de comprobar los resultados de las gráficas con los videos reales.. 1.4. Apreciaciones del Capítulo. El desarrollo de laboratorios virtuales y remotos a distancia es una disciplina que se encuentra todavía en una fase de investigación y desarrollo, destacando la existencia de múltiples iniciativas aisladas por parte de grupos de investigación distribuidos a lo largo del mundo. Para llevar acabo un proyecto de esta envergadura es necesario.
(31) CAPÍTULO 1. Laboratorios Virtuales y Remotos. Implicaciones en la docencia.. 21. conocer los requisitos que tienen que cumplir este proceso de educación a distancia, con el objetivo de facilitar el uso de los laboratorios. Se ha demostrado que ellos pueden mejorar el proceso de enseñanza-aprendizaje, puesto que brindan una gama muy extensa de experimentos reales siendo estos vitales para la realización de prácticas de los estudiantes de ingeniería. Realizando prácticas enfatizadas en el control de reguladores, de robots, de motores, entre otros.. El análisis realizado en este capítulo permitió observar algunas herramientas pedagógicas implementadas en estos laboratorios que facilitan la comprensión de los conocimientos expuestos y ayudan a disminuir esa distancia que existe entre el alumno e instructor. Esas herramientas son: los chat, foros, visualización de videos de las prácticas que se ejecutan, posibilidad de hacer comentarios sobre ellas, reservar prácticas etc. También pudimos ver las ramas en las que se realizan la experimentación con equipos reales.. Todo este estudio nos servirá para determinar las herramientas que implementaremos en el Sistema de Laboratorio a Distancia, realizado en Universidad Central “Marta Abreu” de las Villas, con el objetivo de mejora el proceso de enseñanza aprendizaje que se quiere lograr con este sistema.
(32) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 22. CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia.. 2.1. Introducción.. En el capítulo anterior se analizaron cuestiones sobre el proceso de enseñanza a distancia y algunos laboratorios remotos implementados en otras universidades del mundo. Analizando los aspectos positivos de cada uno de esos laboratorios como las prácticas que se ejecutan en cada uno de ellos y algunas herramientas pedagógicas que utilizan, todo con vistas a incorporarlas a la plataforma SLD que se implementó en la Universidad Central “Marta Abreu” de las Villas. En este capítulo explicaremos como se llevo a cabo el proceso de cambio, específicamente en el aspecto visual del sitio, implementación y modificaciones de prácticas, así como la incorporación de las nuevas herramientas. Además se propondrá un estándar para facilitar la programación de nuevas prácticas.. 2.2. Diseño del SLD.. Para modificar el aspecto visual del sitio web del laboratorio primeramente se analizó la interface existente con vistas a determinar donde se debían centrar los cambios, teniendo en cuenta que el diseño Web antiguo en su momento se ajustó a las necesidades y cumplió con creces su propósito.. 2.2.1. Analisis del Sitio Existente.. El análisis se centró fundamentalmente en ver la cantidad de imágenes que se utilizaban, los colores y el tipo de letras que se empleaban así como el tipo de diseño aplicado..
(33) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 23. Con este análisis pudimos ver que el sitio existente hacia uso de muchas imágenes lo cual traía consigo una demora en la carga de la pagina que daba al traste con los requisitos de desempeño deseados en la actualidad. Por otra parte pudimos ver que esta interface no presentaba una uniformidad de colores y las fuentes de texto utilizadas no eran las más adecuadas para un sitio de este tipo, siendo esto, aspectos que tampoco se ajustaban a lo deseado. Otra cuestión que se tuvo en cuenta es el diseño de sitio el cual estaba realizado con marcos (frames) y paginas construidas con tablas que son técnicas que en la actualidad no gozan de mucha popularidad, por ende el nuevo diseño decidimos hacerlo utilizando hojas de estilo CSS (Cascading Style Sheet).. 2.2.2. Diseño Web del Sitio Nuevo.. La interfaz del sitio nuevo (ver figura 2.1) de forma general se caracteriza por un logotipo, un color base y un solo tipo de letra con variaciones de tamaño según el área donde se encuentren y la información que representen, así como se uso imágenes pequeñas de forma tal que no demoraran en mostrarse cuando el usuario abriera una pagina. Estos elementos brindan a la aplicación identidad y estilo, además de ser recordada por los usuarios con facilidad.. Leyenda 1. Logotipo de GARP. 2. Fecha y hora. 3. Logotipo del sistema. 4. Barra de navegación. 5. Formulario de autentificación, barra de navegación y opciones. 6. Cuerpo de la página. 7. Pie de página, crédito. Figura 2.1: Esquema de las Interfaces..
(34) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 24. En esta nueva imagen del sitio (ver figura 2.2) se facilito el acceso a las prácticas, teniendo la posibilidad de poder acceder desde la página en que se encuentre a cualquier otra sin necesidad de ir a páginas intermedias. Se modificó el ambiente visual de la página que muestra la práctica que se está ejecutando, posibilitando que el usuario elija si desea realizarla de forma simulada o real sin necesidad de salir de esta, disminuyendo así el tiempo de acceso a las prácticas y presentando mayor organización al sitio.. Figura 2.2: Pagina de inicio del SLD.. El diseño fue realizado con CSS, una tecnología desarrollada por el World Wide Web Consortium (W3C) que permite aplicar un formato predeterminado a distintos documentos en HTML o en XML, o sea aplica estilos como color, tipo de letra o espaciado a páginas Web. Dentro de sus beneficios tenemos que acelera la carga de páginas en las conexiones a Internet por línea telefónica. Disminuye la sobrecarga del servidor y del ancho de banda, por lo que se ahorra en la facturación por acceso a Internet. Aminora el tiempo en el diseño y la programación de páginas de Internet. Acorta las operaciones de actualización y mantenimiento. Mientras que Java Script es un lenguaje de programación interpretado que tiene la ventaja de ejecutarse en el cliente por lo que el servidor no es solicitado más de lo.
(35) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 25. debido lo cual brinda rapidez en navegación por la Web y alivia la carga en el servidor (Wikipedia, 2009), (Wikipedia, 2009.), (W3C, 2008), (Gracia, 2008).. 2.2.3. Herramientas utilizadas para el Diseño.. En el diseño visual de la aplicación se utilizó el paquete de Macromedia para las interfaces gráficas, específicamente el editor gráfico Firework 8 para la elaboración de logotipos, imágenes e íconos y el editor Dreamweaver 8 para la conformación de las diferentes páginas.. 2.3. Herramientas Pedagógicas Incorporadas.. En este epígrafe se dejará claro las herramientas que fueron incorporadas al SLD con vista a mejorar su rendimiento en cuanto a la docencia. Estas herramientas se decidieron incorporarlas después de haber analizado en el primer capítulo otros laboratorios que las tenían implementadas.. 2.3.1. Sistema de Autentificación.. Se creó un sistema de autentificación para tener un control más estricto de la comunidad usuaria del sitio, pudiendo controlarse el acceso a las prácticas y posibilitando al los usuarios crearse un perfil en el sistema con sus datos.. Los usuarios en el sistema están divididos en dos grupos importantes.. 1. Usuarios simples: Son aquellos usuarios que hacen uso del sistema en sus funcionalidades más básicas, la ejecución de prácticas, la visualización de prácticas ya realizadas previamente y realización de comentarios.. 2. Usuarios privilegiados: Son aquellos usuarios que tienen mayores privilegios y que pueden trabajar con funcionalidades específicas como son la calificación de prácticas, revisión de comentarios, incorporación de nuevas prácticas, edición de usuarios, configuración del sistema, etc..
(36) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 26. Esta división de usuarios de acuerdo a sus privilegios permite a cada cual centrarse en el role que le corresponde y no interferir en el trabajo de los demás. Al introducirse los datos de usuario login, contraseña y dominio el sistema verifica si son correctos y de acuerdo al privilegio que tenga en la base de datos se le mostraran las opciones correspondientes a su función.. 2.3.2. Revisión de Prácticas.. Esta herramienta cuyo objetivo es completamente pedagógico y docente, permite a los profesores emitir una valoración cuantitativa de los conocimientos del estudiante que ejecutó la práctica. Posibilita también al instructor que les orienta las prácticas a sus alumnos saber el día y la hora que la realizan, llevando un control sobre el aprendizaje de estos. Muestra también al estudiante si la práctica ejecutada es correcta y conocer su calificación, además le permite conocer su estado en esta materia.. 2.3.3. Sistema de Comentarios.. La herramienta implementada se encuentra en la parte inferior de los resultados de cada práctica (ver figura 2.3) con el objetivo de que los estudiantes puedan argumentar, expresar sus criterios y hacer sus comentarios acerca de la práctica realizada; siendo una forma de debate sobre los resultados obtenidos. Por parte del profesor, resulta de gran ayuda esta herramienta, ya que permite evaluar cualitativamente el conocimiento del estudiante sobre esa práctica así como comentar los logros o deficiencias que presenten. También ayuda a establecer ese dialogo importante entre profesor-alumno que existe en las prácticas presenciales debido a que por el SLD el profesor puede encontrarse en ocasiones distante de los alumnos.. Esta herramienta guarda estrecha relación con la explicada anteriormente ya que ambas permiten establecer una realimentación tanto para profesores como para estudiantes..
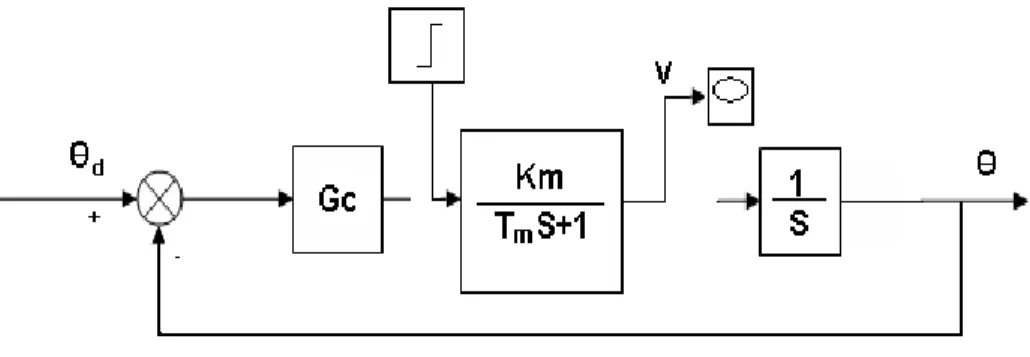
(37) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 27. Figura 2.3: Sistema de comentario.. 2.4. Guías para la realización de las prácticas de laboratorio.. Durante la realización de las prácticas presenciales el profesor distribuye una guía de ejercicios para el laboratorio. En esta modalidad de prácticas de laboratorios a distancia también se confeccionaron guías de laboratorio (ver Anexo II), dirigidas a los alumnos de tercer año de la carrera de Ingeniería en Automática para la realización de las prácticas de la asignatura de Sistemas de Control I. En ellas se muestran una serie de ejercicios en los que se abordan los aspectos principales de la asignatura, siendo de gran apoyo para los alumnos en su estudio independiente.. 2.4.1. Influencia de las acciones de control en el comportamiento de la respuesta transitoria de un sistema de segundo orden.. La primera guía desarrollada tiene como objetivo comprobar el efecto que produce la variación de las acciones de control básicas conocidas (Proporcional, Derivativa e Integral) en el comportamiento transitorio de un sistema.. Para lograr este objetivo, primero se le aconseja al alumno la necesidad de una preparación previa en los contenidos que serán tratados en las prácticas y para eso se les sugieren algunas bibliografías. El primer ejercicio que se le propone al alumno es la obtención de la ganancia y constante de tiempo del motor. Para esto es necesario que los estudiantes analicen la respuesta en lazo abierto antes de un paso en la entrada de la planta, que no es más que un motor de corriente directa (ver figura 2.4)..
(38) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 28. Figura 2.4: Diagrama en bloque del Motor de corriente directa.. Del comportamiento de la salida tienen que identificar el valor de la ganancia Km y el valor de la constante de tiempo Tm con vista a que sean usados en los ejercicios que le siguen.. En el segundo ejercicio se quiere que los estudiantes obtengan la respuesta transitoria del sistema en presencia de diferentes acciones de control. Con el objetivo de que puedan analizar el comportamiento de el sistemas cuando varían cada parámetros del regulador. Aquí se le exige primero al estudiante que le otorgue un valor de cero a los parámetros de Kd y Ki. Luego que empiece a llenar una tabla con determinados valores de Kp y obtener para cada valor los resultados de Mp y tr, con idea de que vea su comportamiento antes de una acción proporcional. Luego se le pide que deje un valor fijo en Kp igual a 110 y cero en la acción integral, cambiando solo Kd con unos valores dado en el ejercicio tiene que completar otra tabla con los parámetros igual a la anterior pero ahora con ts por tr. Por ultimo se le pide dejar fija la ganancia proporcional Kp a 30 y poner a cero la Kd y variar los valores de Ki en los valores que se establece, llenando la tabla correspondiente a este ejercicio.. Una vez realizado los tres experimentos, con las observaciones y los resultados numéricos que hayan obtenido tendrán que responder unas preguntas con el propósito de facilitar la explicación de lo ocurrido..
(39) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 2.4.2. 29. Diseño de Reguladores.. Con la segunda guía que se desarrollo, se quiere que los alumnos obtengan comportamientos predeterminados en la respuesta transitoria de un sistema a partir de diseños adecuados del controlador. Al igual que la primera guía se le sugiere a los estudiantes un estudio breve sobre lo temas correspondientes a diseños de reguladores y otros temas que sean afines a esta practica, indicándole la bibliografía donde lo puede encontrar de forma tal que le sirva de apoyo cuando se enfrenten solos a esta práctica. Aquí también le damos variante para acometer el diseño de su regulador (ver figura 2.5) y luego se le da las especificaciones de la planta (ver figura 2.6) con Km = 2 y Tm =0.02 seg.. Figura 2.5: Variante propuesta para acometer el diseño.. Figura 2.6: Planta para de la guía numero dos.. Todos estos datos son para la realización de los ejercicios propuesto en esta guía. Algunos de estos ejercicios son para diseños de PD otros de PI a partir de unas especificaciones para las respuestas del sistema que se les da en el mismo ejercicio..
(40) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 2.5. 30. Prácticas con el SLD.. En la plataforma SLD se implementaron nuevas prácticas y se modificaron otras que ya estaban confeccionadas. Con estas prácticas es posible abordar temas de: identificación experimental de sistemas SISO, análisis dinámico de sistemas, análisis y diseño en el campo del tiempo, efectos de las acciones de control, ajuste de reguladores de motores de CD y ajuste de controladores. Las nuevas prácticas se hicieron con el objetivo de usarse en las asignaturas de Sistema de Control I en la UCLV y Regulación Automática I en la UPM (Universidad Politécnica de Madrid) de España.. 2.5.1. Identificación de los parámetros Km y Tm del Motor de DC.. Esta práctica fue implementada para usarse en la asignatura de Sistema de Control I con el objetivo de identificar los parámetros Km y Tm del motor de corriente directa, el cual se usa como planta para todas las prácticas que se realizan en el SLD para esta asignatura.. La práctica consiste en darle un paso por el set-point con un valor de (-10 a +10) voltios seleccionado por el estudiante de forma tal que varíe la alimentación de voltaje del motor, luego se analiza la respuesta de la velocidad del sistema en lazo abierto (ver figura 2.7) para determinar los parámetros antes mencionados, donde Km es el cambio total que se produce en la velocidad del motor y el valor de la constante de tiempo Tm como el tiempo que demora la velocidad en alcanzar el 63.2 % del valor final.. Figura 2.7: Esquema en Simulink para la practica de identificación de parámetros del motor.. 2.5.2. Prácticas a Desarrollar.. En el SLD se implementaron dos tipos de prácticas, una con controlador predefinido y otra con controlador definido por el usuario..
(41) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 31. Práctica con controlador predefinido En estas prácticas implementadas se define un controlador al cual se le transfiere mediante la pagina web (ver figura 2.8) parámetros como Kp, Ki y Kd; introducidos por los usuarios. En ellas se puede apreciar los efectos que provocan en la respuesta del sistema la variación de los parámetros de sintonía de los reguladores. Destacar que estas prácticas se pueden desarrollar de forma simulada y también de forma real. En el modo real, primeramente se validan los parámetros introducidos por los usuarios, con el propósito de proteger los equipos reales que se emplean y de realizar prácticas más seguras, de no estar esto valores en el rango aceptado se emite un mensaje de error en forma inmediata. La interfaz empleada es Simulink ejecutada en tiempo real con Real-Time Windows Target.. Figura 2.8: Página Web de la práctica del sistema térmico con controlador predefinido.. Prácticas con controlador definido por el usuario. Estas prácticas implementadas permiten a los usuarios la creación de sus propios controladores de forma remota. Estos controladores pueden ser creados utilizando sólo bloques de Simulink, o de forma opcional, una combinación de bloques de Simulink con funciones definidas por el usuario..
(42) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 32. Cuando el usuario selecciona este tipo de práctica (ver figura 2.9), debe descargar un archivo de Simulink que contiene el diagrama de bloques de la práctica. En este archivo el usuario puede modificar los subsistemas Referencia y Controlador utilizando el software MATLAB-Simulink sin alterar el nombre de las entradas y salidas de los subsistemas. Una vez realizados los cambios, el usuario debe subir al servidor el fichero de Simulink modificado y decidir si quiere realizar una simulación o controlar el proceso real. Si se decide por ejecutar el proceso real, el SLD realiza primero una simulación del sistema y sobre los datos obtenidos de la misma se realizan una serie de pruebas para determinar si el controlador se puede implementar en el sistema real. Una vez determinados estos aspectos el SLD se encarga de implementar el controlador creado, compilar el sistema utilizando el Toolbox Real Time Workshop (RTW) y realizar la práctica en tiempo real.. Figura 2.9: Página Web de una practica de control de posición con controlador definido por el usuario..
(43) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 2.5.3. 33. Modificaciones de las prácticas ya existentes.. Debido a los cambios que se realizaron en la comunicación del SLD se modificaron las prácticas implementadas anteriomente. Esta modificación consistió en eliminar y variar algunas de las funciones que tenían los ficheros .m de cada práctica, adaptándolas a los nuevos requisitos deseados.. La práctica de Control de velocidad de un motor de corriente directa con regulador PID se modifica con fines de utilizarse en prácticas de laboratorio de la asignatura de Sistema de Control I. Con esta práctica los estudiantes tienen la posibilidad de observar los efectos de varios tipos de regulador como P, PI, PD o PID sobre el sistema mostrado en la figura 2.10. Esta práctica complementa a la primera guía desarrollada para esta asignatura, puesto que todos los ejercicios que en ella aparecen están relacionados de una forma directa con la misma.. Figura 2.10: Planta para la práctica de control de velocidad de un motor de corriente directa con regulador P, PI y PID.. 2.6. Estándar de prácticas.. Como se planteó anteriormente, en la plataforma SLD se agrupan principalmente dos tipos de prácticas, las prácticas con controlador predefinido y las prácticas con controlador definido por el usuario. Basado en estos dos modelos se definieron estándares para cada uno de ellos (ver anexo III), de forma tal que puedan ser usados por los usuarios que implementaran nuevas prácticas..
(44) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 2.6.1. 34. Estándar de prácticas con controlador predefinido.. Para la programación del fichero .m de nuevas prácticas con controlador predefinido (ver figura 2.11) se definió un témplate tanto para la reales como para las simuladas. Este témplate permite al usuario programarla con mayor facilidad. Por otro lado obliga a organizar el fichero .m de una manera específica siendo más fácil su revisión.. Figura 2.11: Página Web de prácticas con controlador predefinido.. Pasos a seguir para la confección del fichero .m de las prácticas reales con controlador predefinido.. 1. Validación de las variables: Es donde se definen el número y el nombre de las variables de las prácticas, así como su Límite de Validación Superior (LVS) y Límite de Validación Inferior (LVI). Aquí también es necesario realizar un aviso de error en caso que no cumpla con los límites definidos. 2. Establecer directorio de respuesta: Es la sección del programa donde se establece el directorio para guardar los archivos de respuestas de la práctica..
(45) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 35. 3. Establecer los parámetros de la simulación: Es donde se establecen los parámetros de simulación de la práctica tales como tiempo de inicio y tiempo final de la simulación. 4. Establecer los parámetros para trabajar en tiempo real: En esta parte debe conectarse a los bloques de Simulink y transferir los parámetros de la práctica al bloque correspondiente del mdl y se debe inicializar la simulación en tiempo real. 5. Crear y guardar archivos de respuesta: Es donde se crean y guardan las gráficas, fichero de vectores, página web de salida en el directorio establecido en el paso 2. 6. Limpiar todo el espacio de trabajo: Última parte del programa en donde se debe cerrar todos los mdl, ventanas o figuras abiertas, así como la ventana de comando, de forma tal que la estación este lista para realizar otra práctica.. Los pasos para la confección de ficheros .m para las prácticas simulada con controlador predefinido. Este estándar mantiene en común algunos pasos del anterior.. 1. Igual a la anterior. 2. Igual a la anterior. 3. Envío de las variables al mdl: Es donde se pasan los parámetros introducido en la práctica por el usuario al bloque correspondiente del mdl. 4. Ejecución del mdl: Sección donde se inicializa la simulación en el Simulink con los parámetros introducido por el usuario. 5. Igual que la anterior. 6. Igual que la anterior.. 2.6.2. Estándar para prácticas con controlador definido por el usuario.. El otro estándar que se definió, es para las prácticas con controlador definido por el usuario (ver figura 2.12). Como en el otro estándar, este tiene el objetivo de facilitar la programación del fichero .m de las prácticas..
(46) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 36. Figura 2.12: Página Web de prácticas con controlador definidos por el usuario.. Pasos a seguir para la programación de los ficheros .m de las prácticas reales con controlador definido por el usuario.. 1. Obtención del fichero: Aquí es donde se carga el fichero .mdl del nuevo regulador que introduce el usuario. 2. Establecer directorio de respuesta: Es la sección del programa donde se establece el directorio para guardar los archivos de respuesta de la práctica. 3. Cambio del regulador: Aquí se envía al Simulink el nuevo fichero para remplazar el regulador predeterminado por nuevo fichero, o sea por el nuevo que subió el usuario. 4. Realizar la simulación del modelo (ejecución del mdl): En este paso se debe comenzar a simular la práctica con el nuevo regulador, este paso es importante pues en caso de que el sistema sea muy oscilatorio se emite un mensaje de error y se pasan a los pasos 8 y 9. En caso contrario se procede al siguiente paso. De esta forma se protegen los equipos de trabajo..
(47) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 37. 5. Realizar el reemplazo sobre el modelo real: En esta sección es donde se cambia el regulador predefinido que tiene el .mdl por el modelo de regulador subido por el usuario. 6. Establecer los parámetros de la simulación: Es donde se establecen los parámetros de simulación de la práctica tales como tiempo de inicio y tiempo final de la simulación. 7. Establecer los parámetros para trabajar en tiempo real: En esta parte debe conectarse a los bloques de Simulink y transferir los parámetros de la práctica al bloque correspondiente del mdl y se debe inicializar la simulación en tiempo real. 8. Crear y guardar archivos de respuesta: Es donde se crean y guardan las graficas, fichero de vectores y página web de salida en el directorio establecido en el paso 2. 9. Limpiar todo el espacio de trabajo: Última parte del programa en donde se debe cerrar todos los .mdl, ventanas o figuras abiertas, así como la ventana de comando, de forma tal que la estación este lista para realizar otra práctica. Pasos a seguir para la programación de los ficheros .m de las prácticas simuladas con controlador definido por el usuario.. En este estándar hay pasos iguales al estándar anterior a este.. 1. Obtención del fichero: Igual al estándar anterior. 2. Establecer directorio de respuesta: Igual al estándar anterior. 3. Cambio del regulador: Aquí se envía al Simulink el nuevo fichero para remplazar el regulador predeterminado por nuevo fichero, o sea por el nuevo que subió el usuario. 4. Realizar la simulación del modelo (ejecución del mdl): En este paso se debe comenzar a simular la práctica con el nuevo regulador subido. 5. Crear y guardar archivos de respuesta: Es donde se crean y guardan las graficas, fichero de vectores y página web de salida en el directorio establecido en el paso 2..
(48) CAPÍTULO 2. Prácticas docentes con el Sistema de Laboratorios a Distancia. 38. 6. Limpiar todo el espacio de trabajo: Última parte del programa en donde se debe cerrar todos los .mdl y ventanas o figuras abiertas, así como la ventana de comando, de forma tal que la estación este lista para realizar otra práctica.. 2.7. Apreciaciones del Capítulo.. Como se puede apreciar en este capítulo, al incorporar nuevas herramientas educativas y colaborativa al SLD, se crean nuevos servicios que aumentan las prestaciones que tenía anteriormente. Además que ayuda el proceso de aprendizaje con este sistema y facilita la comprensión de cada práctica. Por otro lado destacar que la implementación de las prácticas en este capítulo se realizó en MATLAB, que es un software muy conocido y utilizado en el campo de la automática.. En el siguiente capítulo veremos los resultados obtenidos de la respectiva ejecución de las practicas implementadas, y una evaluación de uso del SLD por estudiantes de la maestría en automática que se esta impartiendo en la UCLV..
Figure



+7





Documento similar
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
