Estudio cinemático, dinámico y modelado de plataforma simulación de 2 GDL
86
0
0
Texto completo
(2) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(3) i PENSAMIENTO. “La inteligencia consiste no solo en el conocimiento, sino también en la destreza de aplicar los conocimientos en la práctica.” -Aristóteles.
(4) ii DEDICATORIA. A mis Padres Mariela y Elvis, por su cariño, por estar presente en los momentos difíciles, por su paciencia y colaborar siempre para alcanzar mis metas. A ustedes les debo lo que soy.. A mis Abuelos Teresa y Santiago, que me han brindado su apoyo en todos los momento de mi vida. A ustedes por estar siempre que los necesito y por guiarme por los caminos correctos.. A mi bisabuela Fernanda, por ser “su querer del alma”.. A mi Hermanita querida Dani, por darme su felicidad y cariño.. A Beatriz, por todo su amor y la confianza que ha que ha depositado en mí. A ti por todo lo que representas para mí..
(5) iii AGRADECIMIENTOS. A gradezco especialmente a mi tutor Eduardo Izaguirre, por sus enseñanzas, así como por todo el tiempo y empeño que ha dedicado a este trabajo. A Pablo José, por toda su ayuda y consejos, que me fueron de gran ayuda, muchas gracias. A todos mis profesores, por la formación integral que recibí de ellos en mis años de estudio en la carrera. A mis padres y abuelos, por estar siempre presentes y ser mi motivo de inspiración. Este es mi regalo para ellos. A Idelvis y Capó, amigos míos, de siempre y para siempre, gracias por confiar en mí y darme su apoyo en estos 5 años. A mis compañeros de aula, por la amistad que me brindaron durante el tiempo de estudio en la Universidad. A mis familiares y amigos, por alentarme y apoyarme para alcanzar las metas trazadas como profesional. Quisiera agradecer a todas las personas que colaboraron de una forma u otra en la realización de este trabajo. A todos, gracias..
(6) iv RESUMEN. El interés por el estudio de los robots paralelos principalmente el caso de las plataformas de simulación se ha incrementado aceleradamente en los últimos años. Además ocupa en la actualidad un papel preponderante en el proceso de modernización e innovación de las industrias, lo cual se debe a las ventajas que presentan en cuanto al manejo de grandes pesos, la exactitud en el posicionamiento del elemento terminal y la rigidez de las arquitecturas paralelas. En este trabajo se ha hecho un análisis cinemático y dinámico de la Plataforma Simulación de 2-GDL de sello SIMPRO, con vistas al control de la misma. Por lo complejo que puede resultar obtener un modelo dinámico de forma analítica, se han desarrollado técnicas que faciliten el análisis dinámico del comportamiento de estos robots para lograr un control fiable y robusto. Entre estas técnicas está la simulación con programas especializados en mecánica, entre los que se destaca el ADAMS. Por lo que también se presenta la implementación en ADAMS de dicha estructura mecánica, exponiendo las secuencias de pasos a seguir para su diseño. Luego, el modelo obtenido se enlaza con el Simulink de Matlab con el objetivo de intercambiar valores de determinadas variables de interés para el control de la plataforma..
(7) v TABLA DE CONTENIDOS. PENSAMIENTO ....................................................................................................... I DEDICATORIA ....................................................................................................... II AGRADECIMIENTOS ............................................................................................ III RESUMEN ............................................................................................................. IV TABLA DE CONTENIDOS ..................................................................................... V INTRODUCCIÓN .................................................................................................... 1 Organización del informe: ............................................................................................................................... 4. CAPÍTULO I: FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO. .................................. 5 1.1. Introducción al capítulo. ...................................................................................................................... 5. 1.2. Modelo dinámico de los robots paralelos. Importancia:...................................................................... 5. 1.2.1 1.3. Dinámica directa e inversa: ........................................................................................................ 7. Métodos empleados para la obtención del modelo dinámico: ............................................................. 9. 1.3.1. Método de Newton-Euler. ......................................................................................................... 10. 1.3.2. Método de Euler-Lagrange. ...................................................................................................... 13. 1.3.3. Principio del Trabajo Virtual. .................................................................................................. 16. 1.4. Control basado en modelo dinámico inverso: .................................................................................... 19. 1.5. Espacio de Tareas vs Espacio Articular. Ventajas y desventajas....................................................... 21. 1.5.1 1.6. Modelo Dinámico Inverso en el Espacio Cartesiano. ............................................................... 23. Conclusiones del capítulo................................................................................................................... 27. CAPÍTULO II: ESTUDIO CINEMÁTICO Y DINÁMICO ......................................... 28 2.1.. Introducción al capítulo................................................................................................................. 28. 2.2.. Arquitectura y nomenclatura del simulador de 2 gdl .................................................................... 28. 2.2.1.. Definición de las notaciones de la plataforma.......................................................................... 30.
(8) vi 2.3.. Modelo cinemático directo e inverso ............................................................................................. 31. 2.3.1.. Modelo cinemático inverso. ...................................................................................................... 33. 2.3.2.. Modelo cinemático directo........................................................................................................ 33. 2.4.. Cinemática diferencial................................................................................................................... 34. 2.5.. Modelado cinemático de la plataforma. ........................................................................................ 36. 2.5.1.. Modelo cinemático obtenido mediante la formulación vectorial. ............................................. 40. 2.6.. Modelo dinámico. .......................................................................................................................... 44. 2.7.. Conclusiones del capítulo. ............................................................................................................. 53. CAPÍTULO III: MODELADO CON ADAMS. ......................................................... 54 3.1.. Introducción al capítulo................................................................................................................. 54. 3.2.. ADAMS. ......................................................................................................................................... 54. 3.2.1.. ADAMS/Solver .......................................................................................................................... 55. 3.2.2.. Interfaz ADAMS/View. .............................................................................................................. 56. 3.3.. Simulink de Matlab. ....................................................................................................................... 56. 3.4.. Implementación de la plataforma de simulación mecánica para simuladores de conducción. neumáticos. .................................................................................................................................................. 57 3.5.. Análisis económico ........................................................................................................................ 65. 3.6.. Conclusiones del capítulo .............................................................................................................. 65. CONCLUSIONES Y RECOMENDACIONES ........................................................ 66 Conclusiones. ................................................................................................................................................... 66 Recomendaciones. ........................................................................................................................................... 67. REFERENCIAS BIBLIOGRÁFICAS ..................................................................... 68 ANEXOS ............................................................................................................... 71 Anexo I: Producto Vectorial. ......................................................................................................................... 71 Anexo II: Cilindro FESTO DNCB-100-320-PPV-A..................................................................................... 73 Anexo III: Obtención de las expresiones de velocidad................................................................................. 74 Anexo IV: Calculo de la matriz Jacobiana del Robot de 2 gdl.................................................................... 76 Anexo V: Calculo de la matriz Jacobiana. .................................................................................................... 77.
(9) INTRODUCCIÓN. 1. INTRODUCCIÓN A lo largo de los últimos años, la robótica ha alcanzado un notable desarrollo como rama de la ciencia y la tecnología. Actualmente, se ha incrementado la adquisición e instalación de robots de todo tipo en variados entornos productivos relacionados con las esferas de la automatización. El gran interés por estas maquinas se debe a sus múltiples aplicaciones. Ellas intervienen en la medicina, en la industria, en la minería; se usan como simuladores de vuelo para el entrenamiento de pilotos, y también con fines recreativos. Se define como robot al mecanismo articulado multifuncional diseñado para mover materiales, piezas, herramientas o dispositivos especiales, mediante movimientos variados, programados para la ejecución de distintas tareas. De acuerdo a la estructura cinemática del mecanismo los robots se dividen en tres grandes categorías: robots series, paralelos e híbridos. Se dice que un robot es serie si su cadena cinemática es abierta; es decir, sus elementos se encuentran conectados uno a continuación del otro. Un robot paralelo, por su parte, posee una estructura mecánica formada por un mecanismo de cadena cinemática cerrada, en el que el efector final se une a la base por, al menos, dos cadenas cinemáticas independientes. Si aparecen ambos tipos de cadenas cinemáticas en un mismo robot se dice que éste es de estructura híbrida (Merlet 2006). La mayoría de los robots utilizados en la industria son brazos mecánicos con estructura serie, no obstante en los últimos años se ha incrementado el uso de los robots paralelos. Son los robots paralelos los que por su forma permiten el manejo de mayor masa, una velocidad de operación elevada y como si fuese poco una altísima exactitud en el posicionamiento del elemento final. También es cierto que el análisis dinámico de estos robots es más complicado, el espacio de trabajo más pequeño y nada sencillo de calcular. Un robot de cinemática paralela, también llamado robot de cadena cerrada o manipulador paralelo, consiste básicamente en una plataforma móvil unida a una base fija por medio de varios brazos, típicamente las extremidades actuadas puede estar gobernada por uno o más actuadores (Aracil, Saltarén et al. 2006). El primer diseño de un robot de cinemática paralela data de 1962, cuando Gough propuso un manipulador paralelo como máquina para el control de calidad de neumáticos. Dos años después, Stewart (1965) diseñó una plataforma paralela para simulador de vuelo. El mecanismo de Stewart, consistía en una.
(10) INTRODUCCIÓN. 2. plataforma triangular unida mediante articulaciones esféricas a los actuadores lineales ajustables en longitud, que se conectaban a su vez, a una base fija mediante articulaciones universales. Desde entonces muchos investigadores han estudiado el tema y han propuesto nuevos diseños. Algunos de ellos han sido industrializados con gran éxito como por ejemplo la plataforma de Stewart- Gough, el robot Delta, etc. (Limón 2006) Las plataformas de simulación están basadas en la estructura de robot paralelo. El movimiento de estas plataformas está dado por los grados de libertad con que consta. Los grados de libertad son de uno a seis, desde una simple traslación o rotación en un eje hasta traslación y rotación en cada uno de los tres ejes (x, y, z). La plataforma de dos grados de libertad, que es objeto de estudio, es capaz de desarrollar rotaciones alrededor de los ejes (x, y), siendo así apropiada para la simulación de conducción.. Figura 1: Grados de Libertad de la Plataforma de Simulación.. Encontrar el control más eficiente para estos mecanismos es una de las tareas más importantes en la robótica moderna. En el caso del control por modelo dinámico se debe procurar que las trayectorias sean seguidas fielmente por el robot. Para este fin es necesario conocer las ecuaciones que describen la cinemática y la dinámica del robot, así como las herramientas de diseño aportadas por la teoría de control. Estos modelos dinámicos son fuertemente no lineales lo que hace que el procedimiento de diseño para este tipo de sistemas sea muy complejo aunque en la práctica se realizan simplificaciones para facilitar el mismo, pero afectando ciertas características de movimiento del robot..
(11) INTRODUCCIÓN. 3. No obstante, la dinámica juega un papel importante en el control de los robots paralelos. Influye en la rapidez de movilidad del elemento final en robots que manejen grandes pesos como los simuladores de vuelo, en el ancho de banda de la respuesta del robot como en el caso de aplicaciones que necesiten ejercer vibraciones asegurando la rigidez de las articulaciones (Merlet 2006). Para lograr que la plataforma SIMPRO describa un seguimiento de trayectoria con alta exactitud y precisión, se hace necesario diseñar un control satisfactorio. Para lograr esta finalidad se plantea el siguiente objetivo general: •. Desarrollo de un análisis cinemático y dinámico de la Plataforma de Simulación de 2-GDL con vistas al control de la misma en aplicaciones de simulador de movimiento.. Como objetivos específicos se establecen los siguientes: •. Estudio de los fundamentos teóricos relacionados con el control basado en modelo dinámico aplicado a robots paralelos.. •. Planteamiento de las expresiones correspondientes a la cinemática inversa y directa del simulador de movimiento.. •. Planteamiento de las expresiones correspondientes a la dinámica inversa y directa del simulador de movimiento.. •. Desarrollar el modelo virtual de la plataforma de simulación en ADAMS..
(12) INTRODUCCIÓN. 4. Organización del informe. El presente Trabajo de Diploma consta de tres capítulos, conclusiones, recomendaciones, bibliografía y anexos. En el primer capítulo se abordan aspectos teóricos relacionados con la Dinámica de los Robots Paralelos, exponiendo métodos clásicos utilizados para la obtención de los modelos dinámicos de este tipo de estructura, con sus ventajas y desventajas; también se realiza un estudio de la teoría relacionada con Esquemas de Control por modelo Dinámico Inverso en el Espacio Cartesiano aplicado a plataformas de dos grados de libertad. En el segundo capítulo se desarrolla un análisis del comportamiento cinemático y dinámico de la estructura mecánica, donde se plantean las expresiones que corresponden a la cinemática y dinámica inversa y directa de la misma. El tercer capítulo está dedicado al desarrollo del modelo virtual del Simulador de Conducción de 2GDL en ADAMS, en él se realiza un acercamiento a los principales aspectos que presenta este programa especializado en el diseño de sistemas mecánicos, explicando la secuencia de pasos a seguir para lograr esta finalidad..
(13) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO.. 5. Capítulo I: Fundamentos teóricos relacionados con el control basado en modelo dinámico inverso. 1.1. Introducción al capítulo.. Para lograr el control de un robot se hace necesario obtener previamente un modelo matemático el cual describa de la manera más exacta posible las características del sistema, lo cual permitirá estudiar e implementar las acciones de control más apropiadas para cumplir con las exigencias de desempeño del mismo. La obtención del modelo matemático del robot implica análisis de mecanismos que contemplan su estructura, geometría, mecánica, y la obtención de ecuaciones que representen la cinemática y la dinámica del sistema con la mayor precisión posible. El tratamiento analítico constituye un paso imprescindible en el estudio y aplicación de tales sistemas, aunque debido a la complejidad que pueden alcanzar estos modelos se han creado software para la simulación de estos. Mediante la simulación en dichos paquetes de software, se puede evaluar y analizar el comportamiento cinemático y dinámico de los mecanismos de manera eficiente.. 1.2. Modelo dinámico de los robots paralelos. Importancia.. Los robots paralelos se utilizan en diversas aplicaciones, en las que se ha incrementado su uso por las diversas ventajas que brindan respecto a precisión, repetitividad y elevada fuerza. Para su explotación se hace necesario llevar a cabo un control satisfactorio, el cual tendrá como premisa la obtención del modelo dinámico del mismo. La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y los movimientos que en él se originan. Por lo tanto, el modelo dinámico de un robot tiene por objetivo conocer la relación entre el movimiento del mismo y las fuerzas implicadas en dicho movimiento. Entre los pasos más importantes para realizar un modelo dinámico se encuentra la elección del modelo matemático adecuado, el que toma en cuenta consideraciones de precisión y económicas. Las ecuaciones que definen estas relaciones conllevan al resultado del modelo dinámico deseado..
(14) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO.. 6. El desarrollo del modelo dinámico es importante para implementar la estrategia de control apropiada. Para el diseño del controlador se hace necesario un modelo dinámico que represente la relación entre fuerzas y movimiento lo más cercana posible a la realidad. Mientras mayor sea la exactitud del modelo, será más óptimo el trabajo del sistema sobre todo a altas velocidades de operación. La relación entre fuerzas y movimiento tiene que involucrar matemáticamente los siguientes aspectos (Barrientos, Balaguer et al. 1997):. •. La localización del robot definida por sus variables articulares o por las coordenadas de localización de su extremo, y sus derivadas: velocidad y aceleración.. •. Las fuerzas y pares aplicados en las articulaciones (o en el extremo del robot).. •. Los parámetros dimensionales del robot como longitud, masas e inercias y sus elementos.. A medida que aumentan los grados de libertad de estas estructuras mecánicas aumentará el nivel de complejidad de los procedimientos que se realizan para obtener el modelo matemático que describe la dinámica del sistema, por lo que siempre no será posible obtener un modelo dinámico expresado de una forma cerrada. No es tan complicado para robots de uno o dos grados de libertad, pero a medida que aumenten aumentará la complejidad del análisis dinámico debido a la existencia de múltiples cadenas de lazo cerrado. Puede obtenerse el modelo matemático al integrar un conjunto de ecuaciones diferenciales, lo cual permite conocer el movimiento que surge al aplicar una fuerza, o las fuerzas que se deben aplicar para obtener un movimiento deseado(Barrientos, Balaguer et al. 1997). La obtención del modelo dinámico de un robot se basa fundamentalmente en la segunda ley de Newton, la cual se refiere al equilibrio de fuerzas, o su equivalente para movimientos rotacionales, la denominada ley de Euler. Las formulaciones matemáticas generales de ambas leyes son respectivamente:.
(15) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO.. 7. (1.1). (1.2) Siendo: : Momento de inercia. : Velocidad angular. : Masa del cuerpo. : Torque aplicado. : Fuerza aplicada. El efecto que produce una fuerza sobre un cuerpo rígido depende de su punto de aplicación, razón por la cual se introduce el concepto de momento de una fuerza (Beer 2005). Lo más cómodo es elegir como punto de referencia aquel en el cual el eje corta al plano de las fuerzas. La distancia desde este punto a la línea de acción de una fuerza se denomina brazo de la fuerza o brazo del momento de la fuerza respecto al eje. El momento de una fuerza. con respecto a un punto. producto vectorial (denotado como. ) del vector. se define vectorialmente como el. que indica el punto de aplicación de la. fuerza por el vector de dicha fuerza : (1.3) 1.2.1. Dinámica directa e inversa.. El Problema Dinámico Directo (PDD) consiste en determinar la posición, la velocidad y la aceleración del elemento terminal a partir de conocer la fuerza aplicada por los actuadores. Cuando se pretende conocer la fuerza o par necesario que debe ser aplicado en las variables articulares actuadas para producir una conocida velocidad y aceleración en función de.
(16) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO.. 8. tiempo de la plataforma móvil, entonces estamos en presencia del Problema Dinámico Inverso (PDI). La dinámica inversa, consiste en encontrar los torques y/o fuerzas requeridos para generar una trayectoria deseada del manipulador. Cuando estamos en presencia de esta problemática, se conoce el movimiento del sistema (posición, velocidad, aceleración) y se desean encontrar las fuerzas que generan el movimiento ,. (1.4). Donde: : Vector de fuerzas o pares que se aplican en cada articulación. : Matriz de inercia. .. : Fuerzas de Coriolis y Centrífugas : Fuerzas gravitacionales. 1 .. 1 .. La dinámica directa consiste en obtener la respuesta del robot correspondiente a algún torque y/o fuerza aplicado a sus articulaciones. Esto es, dado un vector de torques o fuerzas en la articulación, esperamos conocer el movimiento resultante del manipulador en función del tiempo (Tsai 1999). La solución tanto del Problema Dinámico Directo (PDD), como del Problema Dinámico Inverso (PDI), presupone del conocimiento de un conjunto de parámetros físicos con un nivel de exactitud acorde con la precisión deseada. Estos parámetros se engloban en dos categorías: parámetros cinemáticos y parámetros dinámicos. Los parámetros cinemáticos lo conforman la geometría del robot, la orientación espacial de los pares cinemáticos y la longitud de las articulaciones; mientras que los parámetros dinámicos vienen definidos por las propiedades de masa de las barras que constituyen el sistema robótico: masas, momentos, productos de inercia y ubicación del centro de gravedad. Además, se hace necesario determinar los parámetros que subyacen en el modelo de fricción, fenómeno que ha de ser considerado para realizar un análisis del mismo. Los parámetros dinámicos junto con la fricción constituyen el conjunto de parámetros necesarios a identificar para la resolución del PDI y el PDD. Pese a que desde mediado de los años ochenta se ha venido trabajando en el estudio de la identificación de parámetros dinámicos, todavía permanece.
(17) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN MODELO DINÁMICO INVERSO.. 9. abierto este tema y se ha convertido en una de las áreas consideradas dentro de las principales perspectivas de investigación en la dinámica de sistemas multicuerpos, ya que se ha incrementado la necesidad de obtener modelos más precisos, ya que se hay una mayor demanda de robots en procesos industriales, los que requieren operaciones a altas velocidades (Barrientos, Balaguer et al. 1997). La dinámica inversa puede ser utilizada para el diseño de controladores dinámicos, mientras que la dinámica directa suele ser adoptada al efectuar simulaciones dinámicas del mecanismo, para lo cual también se puede recurrir a efectivos paquetes de software tales como ADAMS, DADS, etc.(Yangmin Li 2008). 1.3. Métodos empleados para la obtención del modelo dinámico.. Entre los métodos clásicos que se emplean para realizar el modelo dinámico destacan los siguientes: •. Método de Newton-Euler.. •. Método de Lagrange-Euler.. •. Principio del Trabajo Virtual.. De todos los métodos basados en vectores uno de los más empleados es la formulación de Newton-Euler. Este método presenta como ventaja la forma lineal de los parámetros del sistema dinámico, de modo que permite el uso de estimadores lineales en el proceso de identificación. Para el caso de los robots tipo serie es más efectivo el uso de una formulación recursiva, pero en caso de robots paralelos es más conveniente usar la formulación no-recursiva de este método (Tsai 1999). Otro de los métodos muy generalizado es el de Lagrange- Euler, el cual ha sido utilizado por sus ventajas en el desarrollo de programas computacionales de propósitos generales para el análisis de sistemas mecánicos (ADAMS, DADS, DYMAC). La formulación Lagrangiana elimina en un principio las fuerzas de restricción, sin embargo, en el caso que se quieran usar con propósitos de diseño, deben ser repuestas algún tiempo después. Este método conduce a ecuaciones finales bien estructuradas en las que aparecen de forma clara los diversos pares y fuerzas que intervienen en el movimiento (gravedad, inercia, Coriolis), aunque tiene la desventaja de tener un alto nivel de complejidad computacional, ya que a.
(18) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 10 MODELO DINÁMICO INVERSO.. medida que aumenten los grados de libertad del sistema, aumentara en potencia de cuatro el número de operaciones a realizar (Barrientos, Balaguer et al. 1997). El denominado Principio del Trabajo Virtual, constituye uno de los métodos de análisis más eficientes desde el punto de vista computacional (Tsai 1999). Este plantea que si una partícula, o un cuerpo rígido, o en general un sistema de cuerpos rígidos unidos, los cuales están en equilibrio bajo la acción de fuerzas externas, se les aplica un desplazamiento arbitrario a partir de la posición de equilibrio, el trabajo realizado por las fuerzas externas durante el desplazamiento será cero. Este principio es muy efectivo cuando se aplica a la solución de problemas relacionados con el equilibrio de maquinas y/o mecanismos que están constituidos por varios elementos conectados entre sí. A continuación se explican cada uno de los métodos anteriormente mencionados. 1.3.1. Método de Newton-Euler.. En la formulación de Newton-Euler, las fuerzas y torques de reacción entre todas las partes móviles, incluyendo las demandas de los actuadores pueden ser fácilmente calculadas, proveyendo un modelo excelente para análisis y estudios de la estructura mecánica. Aunque debido al alto número de ecuaciones y su gran complejidad, la eficiencia computacional del modelo es considerada pobre, haciéndolo difícil de aplicar en control de tiempo real (Cabral 2006). La formulación Newton-Euler incorpora todas las fuerzas que actúan en las articulaciones individuales de la extremidad robótica. Por lo tanto las ecuaciones dinámicas resultantes incluyen todas las fuerzas de restricción entre dos uniones adyacentes. Estas fuerzas de restricción son útiles para dimensionar las articulaciones y uniones durante el estado de diseño (Tsai 1999). El método Newton-Euler puede ser encontrado en dos variantes: •. Newton-Euler Recursivo, el cual suele usarse en robots del tipo serie.. •. Newton-Euler No Recursivo, que es más efectivo para modelar robots paralelos..
(19) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 11 MODELO DINÁMICO INVERSO.. Las cuestiones referentes a la mecánica Newtoniana (Mark W. Spong 2004), que son pertinentes al presente trabajo, pueden ser expresadas en los siguientes postulados: 1. Cada acción tiene una reacción igual y opuesta. Por tanto, si un cuerpo 1 aplica una fuerza una fuerza -. y un torque τ a un cuerpo 2, entonces el cuerpo 2 aplica. y un torque - τ al cuerpo 1.. 2. La razón de cambio del momento lineal corresponde a la fuerza total aplicada al cuerpo. 3. La razón de cambio del momento angular corresponde al torque total aplicado al cuerpo. Entonces aplicando el segundo postulado expresado anteriormente se tiene que:. (1.5) donde. es la masa del cuerpo,. es la velocidad de su centro de masa, y. es la suma de. fuerzas externas aplicadas al cuerpo (Mark W. Spong 2004). Esto puede ser simplificado a la siguiente ecuación donde. es , es decir, la aceleración del centro de masa: (1.6). Aplicando el tercer postulado al movimiento angular del cuerpo se tiene que:. (1.7) donde. es el momento de inercia del cuerpo con respecto al marco de inercia cuyo origen. se encuentra en el centro de masa,. es la velocidad angular del cuerpo, y. de torques aplicados al mismo. La matriz. se obtiene por:. (1.8). es la suma.
(20) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 12 MODELO DINÁMICO INVERSO.. Donde. es la matriz de rotación que transforma las coordenadas del sistema. coordenado adjunto al cuerpo (B) en relación sistema coordenado referencial global (A). Por tanto no existe razón para esperar que. sea constante en función del tiempo. Una. forma de evitar esta dificultad es expresar las ecuaciones del movimiento angular en términos de un marco rígido local al cuerpo o articulación, lo cual lleva a: (1.9) Donde todos los términos están expresados con respecto al marco local del cuerpo (Mark W. Spong 2004). Un adecuado desarrollo de las ecuaciones (1.6) y (1.9) conduce a una formulación recursiva en la que a partir de enunciar las ecuaciones de posición del robot, se obtienen las expresiones para la velocidad y aceleración mediante procedimientos de derivación. El fundamento básico de la formulación Newton-Euler consiste en encontrar los vectores (fuerza y torque) articulares. ,….,. y/o. ,….,. correspondientes a un grupo dado de vectores. , , . En otras palabras, hallar las fuerzas y torques en el robot que. corresponda al conjunto de coordenadas generalizadas del robot dado y a su primera y segundas derivadas (Mark W. Spong 2004). Los principales pasos para obtener el modelo según la formulación de Newton-Euler son: 1. Desarrollar las ecuaciones de la cinemática inversa, obteniendo las velocidades y aceleraciones de todos los puntos de interés. 2. Dibujar el diagrama de cuerpo libre, aislando todos los principales componentes y designando las fuerzas y torques de reacción en los puntos de contacto. 3. Aplicar el Teorema del momento angular y la Segunda Ley de Newton a los elementos pasivos del robot en todas las cadenas cinemáticas (cortando las mismas para abrirlas). 4. Unificar las ecuaciones de las cadenas cinemáticas cerradas en un solo sistema de ecuaciones para obtener las fuerzas de reacción en la plataforma móvil con las extremidades del robot. 5. Desarrollar las ecuaciones de las fuerzas que aplican los actuadores y las fuerzas de anclaje..
(21) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 13 MODELO DINÁMICO INVERSO.. En resumen el método de Newton-Euler constituye uno de los métodos vectoriales más comunes para desarrollar el modelo dinámico. Este tiene la ventaja de tener forma lineal en los parámetros del sistema dinámico, lo cual permite el uso de estimadores lineales en el proceso de identificación (Jens Kroneis 2008). El método del Newton Euler observa los aspectos instantáneos o infinitesimales del movimiento, es diferencial por naturaleza. Sin embargo resulta relativamente complejo, debido al alto número de ecuaciones, lo que hace su eficiencia computacional pobre, siendo así difícil de aplicar en control de tiempo real (Yen P-L 2008). 1.3.2. Método de Euler-Lagrange.. La formulación Lagrangiana es un método muy atractivo para la derivación de la dinámica inversa de un manipulador. Provee de una muy analítica y ordenada estructura, que la hace muy conveniente para los propósitos de control. Esta formulación tiene varias propiedades muy importantes que pueden ser explotadas al diseñar y analizar algoritmos de control. Entre estas propiedades se consideran las relacionadas con las fronteras de la matriz de inercia, la linealidad en los parámetros inerciales, y la conocidas propiedades de pasividad y antisimetría (Mark W. Spong 2004). Para manipuladores paralelos las variables del actuador no son independientes debido a las restricciones cinemáticas. Desde muy temprano se descubrió que este método no es aplicable a manipuladores paralelos de seis grados de libertad. El cálculo viene a ser confuso y la obtención del modelo casi imposible. Aun en mecanismos paralelos de menor movilidad (n<5), la implementación ha demostrado las inconveniencias computacionales de las formulaciones Lagrangianas. Debido a las dificultades mencionadas, al usar el formalismo Lagrangiano en robots paralelos, otros principios de mecánica fueron propiciados para derivar la forma cerrada de la dinámica inversa de tales mecanismos (Houssem Abdellatif 2008). La Función Lagrangiana se define como la diferencia entre las energías cinética y potencial: –. (1.10). Las ecuaciones de Lagrange se formulan en términos de la Función Lagrangiana como (Goldstein 1980).
(22) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 14 MODELO DINÁMICO INVERSO.. ,. , ,…,. (1.11) (fuerza generalizada correspondiente a la iésima coordenada generalizada) representa todas las fuerzas no conservativas. inerciales que son consistentes con las restricciones. mecánicas del sistema, y que no representan reacciones de contacto, pudiendo así englobar tanto a una fuerza. como a un torque , según la correspondiente coordenada generalizada. sobre la que actúa (Tsai 2000). Las coordenadas generalizadas son un conjunto de. parámetros. que sirven para. determinar de manera unívoca la configuración del sistema. Estos parámetros pueden ser cualesquiera, sin necesitar ser homogéneos en cuanto a sus dimensiones. Para un robot estas coordenadas corresponden a las variables articulares activas (Limón 2006). La energía cinética, desde una vista simple, responde a la siguiente ecuación, donde la masa y. es. la velocidad del cuerpo:. 1 2 (1.12) Sabiendo que la velocidad es la derivada de la posición (el vector q) y que el cuadrado de vectores se logra por el producto del vector por su transpuesta, llegamos a: 1 2 (1.13) Dado que se trabaja con matrices y en el campo de la física euleriana (movimientos rotacionales, torques,…) se sustituye la masa del cuerpo por la matriz de inercia ( )..
(23) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 15 MODELO DINÁMICO INVERSO.. 1 2 (1.14) La energía potencial. almacenada en el eslabón. se define como la cantidad de trabajo. requerido para elevar el centro de masa del eslabón. desde un plano de referencia. horizontal a una posición actual bajo la influencia de la gravedad. Siendo el resultado de la siguiente ecuación donde. es la posición del centro de gravedad de cada eslabón (Tsai. 1999).. (1.15) Sustituyendo (1.14) y (1.15) en (1.10) se tiene:. 1 2 (1.16) Luego de un complicado trabajo algebraico con matrices, aplicando (1.11) se obtiene la llamada forma general de las ecuaciones dinámicas por Euler-Lagrange: (1.17) Donde. es el vector de fuerzas gravitacionales y. es el vector que representa las fuerzas. centrífugas y de Coriolis (Tsai 1999). En resumen el método de Euler-Lagrange tiene las ventajas de presentar una analítica y ordenada estructura, que la hace muy conveniente para los propósitos de control. El método de Euler-Lagrange considera las condiciones del sistema durante un espacio de tiempo finito, es un método integral (Bruyninckx 2005). No obstante, aunque se ha aplicado para la obtención del modelo dinámico en robots paralelos, es difícil generalizar el mismo para todas las formas de arquitecturas paralelas (Yen P-L 2008)..
(24) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 16 MODELO DINÁMICO INVERSO.. 1.3.3. Principio del Trabajo Virtual.. El principio del Trabajo Virtual es uno de los métodos de análisis dinámico mejor recomendado en la literatura, por tener una muy buena relación costo/beneficio y permitirnos conocer la información principal del modelo sin un alto costo computacional (Cabral 2006). Este engloba el concepto del Trabajo Virtual y el principio de D’Alembert, mediante los cuales se formulan directamente las ecuaciones dinámicas de manera conjunta para todo el sistema, y no partícula a partícula (Limón 2006). Ahora bien, el principio del Trabajo Virtual aplicado a una partícula establece que, “si una partícula está en equilibrio, el trabajo virtual total de las fuerzas que actúan sobre la partícula es cero para cualquier desplazamiento virtual de la partícula”. Entonces si la partícula está en equilibrio la resultante. de las fuerzas es cero. Extendiendo este mismo. análisis para el caso de un cuerpo rígido, el principio del trabajo virtual plantea que “si el cuerpo rígido está en equilibrio el trabajo virtual de las fuerzas externas que actúan sobre el cuerpo es cero para cualquier desplazamiento virtual del cuerpo”. Esta condición necesaria establece que si el cuerpo está en equilibrio, todas las partículas que lo forman también lo están y el trabajo virtual total de las fuerzas que actúan sobre la partícula debe ser cero. Como el trabajo total de las fuerzas internas es cero, por tanto el trabajo total de las fuerzas externas también debe ser cero (Beer 2005). Existe un término que debe ser explicado antes de plantear las formulaciones; este es el denominado desplazamiento virtual. . Los desplazamientos virtuales son un concepto. abstracto que sirve para formular el Principio del Trabajo Virtual; se trata de desplazamientos ficticios, que tienen lugar en un instante “congelado” de tiempo. Por el contrario, los desplazamientos infinitesimales reales durante un intervalo de tiempo. se producen en el movimiento real,. , y se pueden expresar como un diferencial en funciones. que definen el movimiento (Limón 2006). Además tenemos los vectores de fuerzas generalizadas. .. Para un sistema en equilibrio, el Principio de D’Alembert se reduce a la condición de que el trabajo virtual de las fuerzas aplicadas sea cero; entonces el concepto de trabajo virtual podría expresarse matemáticamente como: ·. ·. …. ·. (1.18).
(25) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 17 MODELO DINÁMICO INVERSO.. …. ·. (1.19). 0 (1.20). Por estas ecuaciones se puede analizar el sistema de manera estática; sin embargo, es posible extender dicho concepto al análisis dinámico si se consideran las ecuaciones de las fuerzas y momentos inerciales. Así, si dichas fuerzas y/o momentos inerciales son agrupados como fuerzas generalizadas inerciales. , el principio de D’Alembert puede. escribirse de la siguiente manera: ∑. –. 0. (1.21). Mientras que el trabajo virtual para desarrollar un análisis dinámico quedaría como:. · (1.22) Por conveniencia se introduce un vector de inercia momentos netos. , que combina las fuerzas netas. y. , que actúa sobre el centro de masa del eslabón .. (1.23) Similarmente se introduce otro vector pero este combinará las fuerzas y momentos que actúan sobre el centro de masa de la plataforma.. (1.24).
(26) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 18 MODELO DINÁMICO INVERSO.. Entonces el principio del trabajo virtual para el robot paralelo puede ser descrito como (Tsai 1999): ∑. 0. (1.25). Aquí, el desplazamiento virtual de cada articulación plataforma móvil como. se denota como. y el del. , mientras que el de las coordenadas generalizadas o variables. articulares activas se denota como. …. . El desplazamiento de las. coordenadas generalizadas se relaciona con el desplazamiento de la plataforma mediante la matriz jacobiana. de la siguiente manera: (1.26). También se relaciona el desplazamiento virtual de la articulación. con el de la. plataforma mediante la matriz jacobiana , quedando (Tsai 1999): (1.27) Sustituyendo (1.26) y (1.27) en (1.25) se obtiene. 0 (1.28) Ya que la ecuación anterior es válida para cualquier desplazamiento virtual. , sigue que:. 0 (1.29).
(27) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 19 MODELO DINÁMICO INVERSO.. La ecuación (1.29) describe la dinámica de un robot paralelo. Si el número de actuadores es igual al de los grados de libertad (como en el caso que nos ocupa), entonces. será una. matriz cuadrada. Por lo tanto, puede ser determinado únicamente por (Tsai 1999):. (1.30) 1.4. Control basado en modelo dinámico inverso.. El desarrollo industrial ha requerido una evolución de los robots, incrementándose sus prestaciones en cuanto a velocidad y precisión de movimiento. Esto ha requerido del uso de materiales más ligeros, de sistemas de trasmisión si holgura y con baja inercia, de actuadores rápidos y precisos o de sensores de elevada resolución. También se han desarrollado algoritmos para realizar un control satisfactorio de estos robots, lo que trae consigo mejoras en cuanto a velocidad y precisión en el movimiento. El control por modelo dinámico inverso es considerado uno de los esquemas de control más efectivos para gobernar robots paralelos. En la actualidad la mayoría de las investigaciones desarrolladas han sido en asuntos de la cinemática de los robots paralelos, mientras que la cantidad referida al control dinámico es relativamente menor. El control cinemático selecciona trayectorias que debería seguir el robot idealmente, ajustándose de la forma mejor posible a las especificaciones del movimiento dadas por el usuario, para lo cual ha de tener en cuenta sus limitaciones. En la práctica las características dinámicas del robot (inercias, rozamientos, holguras, etc.), muchas veces desconocidas impiden que la trayectoria deseada. coincida con la real. . El control dinámico tiene por misión procurar que las trayectorias realmente seguidas por el robot. sean lo más parecidas posibles a las propuestas por el control cinemático. . Para ello se hace uso del conocimiento del modelo dinámico del robot y de las herramientas de análisis y diseño aportadas por la teoría del control (Barrientos, Balaguer et al. 1997)..
(28) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 20 MODELO DINÁMICO INVERSO.. Los métodos más utilizados para controlar robots series son el denominado control simple o control PID y el control por modelo dinámico inverso o torque computado, ambos en el espacio articular. Los conocimientos acerca de los robots series se han llevado al campo de los mecanismos paralelos, por lo que en estos últimos se aplican las mismas estrategias de control. En los robots paralelos, es necesario resolver el modelo dinámico como premisa para obtener un control satisfactorio. Un esquema frecuente consiste en utilizar la dinámica inversa para el diseño de un regulador dinámico. El modelo dinámico inverso permite calcular los pares y/o fuerzas necesarias en cada articulación para seguir una trayectoria deseada (Tsai 1999). Este cálculo puede realizarse antes del movimiento o durante el movimiento (en tiempo real). Para que el modelo sea realizable en tiempo real el costo computacional debe ser aceptable. Si el modelo del robot es exacto y no hay perturbaciones externas significativas, se seguirá la trayectoria sin error al aplicar a cada articulación la fuerza calculada. Por otra parte las incertidumbres del modelo influirán en el comportamiento dinámico del sistema y con ello en el resultado final del control del sistema (systems performance) (Silva 2005). Ya se han visto algunos de los métodos principales para la obtención del modelo dinámico, en este caso la dinámica inversa. Con respecto al control en tiempo real de mecanismos paralelos, el objetivo del modelo dinámico es establecer un modelo dinámico inverso como estrategia de control, el cual sea simple pero lo suficientemente preciso para representar el comportamiento dinámico del sistema robótico. En general, una vez que el mecanismo es diseñado y desarrollado, su exactitud de manipulación puede ser garantizada diseñando su propio controlador. El control por dinámica inversa puede producir un buen desempeño del sistema, mejor aun cuando el modelo completo del sistema es usado con gran exactitud en los parámetros. No obstante siempre existirán incertidumbres no consideradas en el modelo dinámico debido a la dificultad de identificar con precisión los parámetros del modelo, o por naturales simplificaciones cometidas al modelar. Por lo tanto, el desempeño ideal del método de control por dinámica inversa queda degradado. Para resolver este problema se hace necesario introducir otra estrategia de control que trabaje a la par (Yangmin Li 2008)..
(29) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 21 MODELO DINÁMICO INVERSO.. 1.5. Espacio de Tareas vs Espacio Articular. Ventajas y desventajas.. El espacio de tarea abarca todas las colocaciones y todas la orientaciones (las llamadas poses) que el elemento final (en este caso la plataforma móvil) puede tomar (Levine 1999). El control en el espacio de tareas, o espacio cartesiano, es particularmente aplicable a los mecanismos paralelos. Teóricamente, dado que la pose del elemento final es el estado del mecanismo, el control cartesiano asegura un control retroalimentado de dicho estado con una mejor precisión que el control articular. Más aun, al usar un modelo dinámico en el espacio cartesiano, se requiere un uso mínimo de transformaciones numéricas lo cual conduce a un rápido, estable y preciso control, siempre que se haya usado un buen modelo y desarrollado una buena identificación de los parámetros dinámicos, lo cual puede considerarse un reto a resolver en el caso de las estructuras paralelas. Además, algunas ventajas adicionales pueden ser advertidas cuando una medida rápida y precisa de la pose del elemento final puede estar disponible (Flavien Paccot 2009). En este caso se considera que existe un sistema sensorial que pueda brindar la información necesaria de la pose del robot. Primeramente, el control por modelo dinámico inverso en el espacio de tareas puede ser más preciso que su semejante en el espacio articular, ya que en este último el error regulado es el error entre la trayectoria deseada transformada y una medida, no reflejando la pose real del elemento final. El control por modelo dinámico inverso en el espacio cartesiano asegura un control directo de tarea, ya que el error regulado es el error entre la medida y la trayectoria deseada del elemento final (Flavien Paccot 2009). En segundo lugar, puesto que el modelo cinemático inverso no se usa para computar el camino articular de referencia, las restricciones en identificación cinemática podrían despreciarse. Ciertamente, sin identificación cinemática, el control cartesiano realiza un posicionamiento preciso del elemento final, cuando se desea una tarea punto a punto, puesto que la trayectoria de referencia no está influenciada por los errores del modelo cinemático inverso. Además, la identificación dinámica, la cual es lineal, es más fácil de ajustar que la cinemática, que es no lineal (Flavien Paccot 2009). En tercer lugar, un control cartesiano de espacio es más interesante en la vecindad de singularidades. Una configuración de variable articular conduce a varias posturas del elemento final. En el espacio articular, un disturbio en la trayectoria articular puede.
(30) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 22 MODELO DINÁMICO INVERSO.. cambiar la pose del elemento final sin cambiar la configuración articular y no ser observado por el control de este, mientras que el control en el espacio cartesiano es capaz de hacerlo (Avalos 2010). Al usar un control en el espacio articular, los errores de posicionamiento articular son independientes unos de los otros, lo que provoca que las restricciones cinemáticas no puedan ser aseguradas. Esto trae consigo afectaciones como pueden ser movimientos parásitos incontrolables del elemento final o torques internos si estos movimientos son imposibles, afectando las articulaciones pasivas. Estos torque internos pueden ser minimizados, y en el mejor de los casos cancelados si se utiliza un control en espacio cartesiano. Los errores regulados, los cuales son errores en la pose, son naturalmente compatibles con los movimientos del elemento final (Flavien Paccot 2009). En el esquema de la figura 1.1 se indica el empleo de un sistema sensorial para medir la pose de la plataforma móvil, evitando con ello el empleo de la cinemática directa y del cómputo de. disminuyendo considerablemente las exigencias computacionales del lazo. de control, y con ello garantizando su implementación en sistemas de control de tiempo real.. Figura 1.1: Esquema genérico de control dinámico inverso en el espacio cartesiano. El esquema de control empleado, que se muestra en la figura anterior, está implementado en correspondencia con la ecuación: , Donde la señal de mando. (1.31) será:.
(31) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 23 MODELO DINÁMICO INVERSO.. (1.32) (1.33) Siendo. y. las matrices de ganancia y. la posición deseada de la plataforma móvil. en el espacio de tareas. Las acciones de control fundamentadas por las expresiones (1.31) y (1.33) tienen en consideración el modelo dinámico del sistema, y nos conducen a la siguiente ecuación de segundo orden que describe la dinámica del error: 0. (1.34). donde: Vector de error de posición en el espacio de tareas:. (1.35). Vector de error de velocidad en el espacio de tareas:. (1.36). Vector de error de aceleración en el espacio de tareas:. (1.37). Por todo lo anteriormente expresado podemos decir que el control cartesiano tiene varias ventajas sobre el control articular, siendo además aplicable en las estructuras paralelas. Todo esto es asumiendo que se cuenta con una medición precisa y rápida de la pose del elemento final, ya que esta medida no es tarea fácil de resolver. 1.5.1. Modelo Dinámico Inverso en el Espacio Cartesiano.. En nuestro caso se hace necesario tener el modelo dinámico expresado como una relación entre la trayectoria del elemento final y las fuerzas y/o pares que en él se aplican, referidos todos a un sistema de coordenadas cartesianos fijo del entorno de trabajo. Cuando los datos (trayectorias, fuerzas, pares, etc.) se dan en éstas coordenadas, se sabe que se trabaja en el espacio de tareas. La forma generalizada para representar el modelo dinámico de un robot en el espacio articular, se indica en la expresión (1.9) (Barrientos, Balaguer et al. 1997; Aracil, Saltarén et al. 2006; Chuang and K-H 2006): Se conoce que la Jacobiana del robot ( ) puede expresarse como:.
(32) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 24 MODELO DINÁMICO INVERSO.. (1.38) (1.39) Derivando (1.38) respecto al tiempo: (1.40) Despejando. tenemos: (1.41). Las expresiones (1.40) y (1.41) relacionan las aceleraciones cartesianas y articulares de manera directa e inversa. El teorema del trabajo-energía establece que el cambio en la energía cinética del robot es igual al trabajo neto. efectuado por el mismo. Dado que el trabajo de la resultante de. las fuerzas que actúan sobre el robot modifica su energía cinética y como el trabajo es el producto punto del vector fuerza (o torque) por el vector desplazamiento lineal (o angular), se cumple la igualdad: (1.42) Partiendo del hecho de que la potencia consumida por el robot debe ser la misma tanto si se evalúa en el espacio cartesiano como en el articular, se puede escribir: (1.43) Donde. es el vector de fuerzas y/o pares (espaciales) ejercidos en el extremo del robot. expresado en el sistema de coordenadas de la base y. es el vector de fuerzas y/o pares. ejercidos en las articulaciones. Sustituyendo (1.39) en (1.43) se obtiene (Massimo Callegari 2006): (1.44).
(33) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 25 MODELO DINÁMICO INVERSO.. (1.45) (1.46) La expresión anterior es de destacable utilidad, ya que relaciona las fuerzas y/o pares generalizados ejercidos en el extremo del robot con los ejercidos en cada una de las articulaciones. Sustituyendo (1.41) y (1.46) en la ecuación del modelo dinámico se obtiene: ,. (1.47) ,. ,. (1.48). ,. (1.49). ,. (1.50) (1.51). donde: (1.52) ,. ,. (1.53) (1.54). La expresión (1.51) define el modelo dinámico del robot en coordenadas cartesianas conocido también como modelo dinámico en el espacio de tareas (Yangmin Li 2008). Si se considera el efecto de las fuerzas externas sobre el sistema robótico, la misma puede escribirse como:.
(34) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 26 MODELO DINÁMICO INVERSO.. ,. (1.55). donde: : Matriz inercia del sistema. ,. : Matriz de fuerzas de Centrífugas y de Coriolis. : Vector de las fuerzas gravitacionales.. : Fuerzas externas. Obsérvese que dicha formulación parte del modelo dinámico en el espacio articular y de la ecuación que define a la matriz Jacobiana del robot (R. Kelly 2005), también denominada matriz Jacobiana del manipulador (Kurfess 2005). La forma de las matrices. ,. y. sería la siguiente para un robot de dos grados de. libertad:. (1.56) , ,. , , (1.57). (1.58). En los robots paralelos la dinámica de los actuadores debe ser tomada en cuenta en el modelo del robot, siempre que no sea lo suficientemente despreciable con respecto a la del.
(35) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS RELACIONADOS CON EL CONTROL BASADO EN 27 MODELO DINÁMICO INVERSO.. sistema total, y más específicamente cuando el robot alcanzará altas precisiones en sus tareas (R. Kelly 2005). 1.6. Conclusiones del capítulo. •. El modelo dinámico del sistema juega un papel fundamental en el buen desempeño del control. En la medida que el modelo represente mejor el comportamiento dinámico del robot, así será la exactitud con que se logrará controlar y la respuesta que se obtendrá.. •. El control en el espacio de tareas, o espacio cartesiano, resulta eficaz en mecanismos paralelos como el que se ha tratado. Esto es así siempre que se cuente con un sistema de medición rápido y efectivo que brinde la información de las variables que definen la pose de la plataforma..
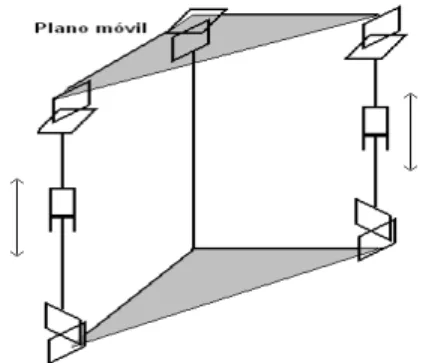
(36) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. 28. Capítulo II: ESTUDIO CINEMÁTICO Y DINÁMICO. 2.1.Introducción al capítulo. En este capítulo se describen los detalles técnicos y el funcionamiento del simulador de conducción desarrollado por SIMPRO, tanto de su parte mecánica como de la neumática. Es importante conocer los movimientos que describe esta plataforma de dos grados de libertad, así como los límites propios de su movilidad, es por ello que se describe con precisión las dimensiones de las articulaciones. Luego se desarrolla un análisis acerca de la cinemática y la dinámica del robot, planteándose las expresiones que describen las mismas. 2.2.Arquitectura y nomenclatura del simulador de 2 gdl. El simulador de conducción de sello SIMPRO (Figura 2.1) producido por CIDSIM es ampliamente utilizado en el entrenamiento de personal. Está compuesto por una cabina de conducción con un monitor que brinda información visual del entorno virtual con el que interacciona el conductor,. pudiendo simularse diferentes tipos de vehículos ligeros o. pesados. La misma presenta una arquitectura formada por una estructura paralela, con cinco uniones universales y dos articulaciones prismáticas actuadas por pistones neumáticos de doble efecto.. Figura 2.1: Imagen de la plataforma de conducción SIMPRO..
(37) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. 29. La cabina pivotea sobre una columna central mediante una articulación pasiva en cuyo extremo superior se encuentra una unión universal. Los movimientos de la plataforma móvil se logran mediante la acción de los dos cilindros neumáticos de doble efecto (actuadores) que constituyen articulaciones actuadas prismáticas, cuyos desplazamientos lineales le imprimen al elemento terminal rotaciones sobre dos ejes perpendiculares entre sí. (ejes x y y para nuestro caso) Estas rotaciones simulan las pendientes del mundo virtual las cuales son visualizadas en el monitor ubicado en la propia cabina. En ambos extremos de las articulaciones prismáticas, se encuentran uniones universales que le permiten los grados de movilidad necesarios para lograr las orientaciones de la plataforma móvil superior. ( Figura 2.2). Figura 2.2: Arquitectura de la Plataforma de simulación SIMPRO.. Dicha plataforma de simulación SIMPRO constituye un robot paralelo de dos grados de libertad, donde la acción de cada uno de los actuadores tiene efecto sobre una sola articulación lo que permite que esta se comporte de forma desacoplada. Parámetro. Valor. Masa total de la cabina (kg) Posición del CM. , ,. en mm. 500 [ 0, 0, 700 ]. Ángulo de cabeceo. de. 13°. 19°. Ángulo de ladeo. de. 13°. 19°. Distancia del origen cada cilindro (mm). 560. Elongación máxima de los cilindros (mm). 320. Tabla 2. 1: Datos mecánicos del simulador de conducción.
(38) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. 30. 2.2.1. Definición de las notaciones de la plataforma. Para el caso particular de la plataforma objeto de estudio, tenemos que la base fija está compuesta por el triángulo formado por los puntos A1OA2 dependiendo solamente de las longitudes. y. .. La plataforma móvil está conformada por el plano que forman los puntos B1PB2 siendo única su geometría y solamente dependiente y definida por la longitud de sus bordes. y. . La definición de los orígenes de coordenadas en los sistemas de referencia fijo y móvil se realizan de acuerdo la bibliografía consultada (Merlet 2006). En tal sentido consideramos ubicar el sistema de referencia móvil coincidente con el centro del triángulo que conforma la plataforma superior (elemento terminal) la cual es la responsable de soportar la cabina de conducción. El sistema de referencia fijo se coloca en el centro de la base fija ubicada en la en la parte inferior de la base metálica que soporta toda la estructura de la plataforma, la cual va anclada al suelo (ver Figura 2.3).. Figura 2.3 Definición de los sistemas de referencia y de las longitudes de los brazos en la plataforma SIMPRO. La orientación en el espacio de la plataforma móvil estará determinada por los ángulos de rotación. y . El ángulo. es el ángulo de rotación alrededor del eje x’ del sistema x’y’z’.
(39) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. de coordenadas móviles, el cual da la sensación de cabeceo, mientras que. 31 es el de. rotación alrededor del eje y’, brindando la sensación de alabeo. 2.3. Modelo cinemático directo e inverso. La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia dado (Merlet 2006). Realiza una descripción analítica del movimiento espacial del robot como una función del tiempo, particularmente estableciendo las relaciones entre la posición y la orientación del extremo final del robot con los valores que toman sus coordenadas articulares. Existen dos problemas a resolver por la cinemática del robot (Tsai 1999), el primero se conoce como el problema cinemático directo que consiste en determinar cuál es la posición y orientación del extremo final del robot con respecto a un sistema de coordenadas que se toma como referencia conociendo los valores de las articulaciones y los parámetros geométricos de los elementos del robot. El segundo se denomina problema cinemático inverso que resuelve la configuración que debe adoptar el robot para una posición y orientación del extremo conocida. También la cinemática del robot define las relaciones entre las velocidades del movimiento de las articulaciones y las del elemento terminal, por su parte el modelo diferencial expresado mediante la matriz Jacobiana establece similares relaciones pero teniendo en cuenta las velocidades. Las relaciones que busca el modelado cinemático no tienen en cuenta las fuerzas o pares que actúan sobre el robot (actuadores, cargas, fricciones) que son originadas por el movimiento del mismo pero si debe permitir conocer, además de la relación entre las coordenadas articulares y el extremo final, la relación entre sus respectivas derivadas que permiten que el sistema de control establezca que velocidad debe imprimir a cada articulación para que el extremo final desarrolle una trayectoria concreta (Barrientos, Balaguer et al. 1997). El análisis de la cinemática directa constituye uno de los problemas más complejos a resolver en la obtención del modelo de los robots paralelos respecto a los robots series. Su objetivo es más bien para la simulación ya que la solución de la problemática de la.
(40) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. 32. cinemática inversa es uno de los elementos básicos para el control de posición y velocidad del robot. El verdadero problema de la cinemática directa sin solucionar radica en complementar los algoritmos actuales para encontrar un algoritmo que rechace las soluciones que no pueden ser alcanzadas (singularidades) del conjunto total de soluciones. Aún no está claro si este criterio podrá ser suficiente para eliminar no todas sino una no posible solución. La modelación cinemática de los robots paralelos difiere de la modelación de los series. En los series se aplica la metodología de Denavit- Hartenberg, (Aracil, Saltarén et al. 2006), que permite la obtención del modelo cinemático directo de una manera sencilla e independiente de su configuración física. La obtención del modelo cinemático inverso es más difícil, y requiere utilizar consideraciones geométricas especificas para cada configuración, resolver ecuaciones por métodos numéricos resulta complejo y brinda un gran número de soluciones. En el caso de los robots paralelos el modelado de la cinemática inversa es sencillo, siendo su planteamiento basado en consideraciones geométricas generales. A diferencia de la robótica serie la cinemática directa resulta ser más compleja. Numerosos han sido los estudios realizados en la modelación cinemática, pero los primeros que se centraron en el estudio de las arquitecturas paralelas fueron Fichter en 1986 y Merlet en 1990. Fichter realizó trabajos con la plataforma de Stewart, formulando las ecuaciones dinámicas de una forma rudimentaria, donde despreciaba la masa de los actuadores y la fricción de las articulaciones, también enumeró configuraciones articulares singulares. Realizó varias recomendaciones para la construcción práctica de la plataforma de Stewart describiendo la construcción del robot de la Universidad de Oregón en el cual usó una plataforma triangular sobre una base hexagonal semiregular. Merlet por su parte presentó una descripción del prototipo de plataforma de Stewart construida en el INRIA, Sophia-Antipolis, Francia, dando las directrices para solucionar las ecuaciones cinemáticas, desarrollar el Jacobiano, derivar las ecuaciones dinámicas en condiciones más generales que las propuestas por Fichter y determinar el espacio de trabajo. También hizo mención del potencial de la plataforma de Stewart como sensor de fuerza y como dispositivo de acoplamiento pasivo..
(41) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. 33. 2.3.1. Modelo cinemático inverso. El modelo geométrico inverso de un robot paralelo se puede definir por el conjunto de ecuaciones que establecen los valores de las variables articulares de su cadena cinemática en función de la configuración del efector final. (Aracil, Saltarén et al. 2006; Merlet 2006). El modelo geométrico inverso de un robot paralelo puede ser planteado en forma vectorial donde el número total de ecuaciones que caracteriza el modelo coincide con el número de grados de libertad del robot. Las relaciones correspondientes a la cinemática inversa permiten calcular las coordenadas articulares a partir de conocer las variables espaciales del robot. En este caso, el modelo cinemático inverso adquiere la forma: , ,. (2.1). Para obtener las expresiones cinemáticas anteriores se procede a ubicar convenientemente el sistema de coordenadas fijo. y móvil. ′ ′ ′, que junto con la nomenclatura. definida para los puntos de la base fija y la plataforma móvil se ilustran en la Figura 2.3. 2.3.2. Modelo cinemático directo. El cálculo del modelo cinemático directo consiste en calcular la posición y orientación de la base móvil a partir del conocimiento de las variables actuadas articulares. Resulta ser más complejo en este tipo de arquitecturas ya que permite obtener analíticamente el vector de coordenadas de la base móvil y la matriz de rotación compatibles con las ecuaciones planteadas para cada cadena cinemática. Así, si se han escogido coordenadas cartesianas y ángulos de Euler para representar la posición del elemento terminal del robot de 2 grados de libertad, la solución al problema cinemático directo vendrá dada por las relaciones: , , La cinemática directa se puede obtener por dos métodos básicos (Merlet 2006). (2.2).
(42) CAPÍTULO 2. ESTUDIO CINEMÁTICO Y DINÁMICO.. -. Método analítico.. -. Método geométrico.. 34. Las múltiples soluciones que brinda la cinemática directa se puede obtener mediante la utilización de métodos numéricos clásicos, por ejemplo mediante el algoritmo de NewtonRaphson (Goldstein 1980), (Varshalovich 1988), Métodos de Euler, Liebman, u otros (Sung-Hua, Chin-I et al. 2008), o bien mediante algoritmos especialmente diseñados para el tipo de robot en particular (Faugere, Merlet et al. 2006), con el inconveniente de que se debe asegurar la convergencia del algoritmo. Sin emabargo aún no se ha encontrado ningún método que permita determinar la pose válida del robot dentro del conjunto de soluciones posibles, lo cual atenta contra la implementación de la cinemática directa en sistemas de control con exigencias de tiempo real. 2.4. Cinemática diferencial. La herramienta principal para analizar las velocidades de un robot paralelo es la matriz Jacobiana que establece la relación entre las velocidades de las coordenadas articulares y las velocidades de variación de la posición y orientación del extremo del robot (Tsai 1999). La matriz Jacobiana es una matriz formada por las derivadas parciales de primer orden de una función. Una de las aplicaciones más importantes de esta matriz es la posibilidad que brinda de aproximar linealmente a la función en un punto. En este sentido, representa la derivada de una función multivariable. Se plantea que para obtener la matriz Jacobiana que defina las ecuaciones diferenciales del movimiento, es decir, caracterizar la velocidad y la aceleración de una plataforma, una de las vías puede ser derivar la matriz de los ángulos de Euler (Tsai 1999). La caracterización de las velocidades angulares de una plataforma de dos grados de libertad se puede hacer a través de la convención XYZ de los ángulos de Euler y a partir del planteamiento de la matriz de posición del elemento terminal derivar la propia matriz (Izaguirre, Dominguez et al. 2008). El análisis Jacobiano de un manipulador paralelo es complicado porque se presentan muchos eslabones que forman cadenas cerradas. Autores como Gosselin y Tsai proponen la.
Figure



+7






Documento similar