Morfología Matemática: Un Enfoque al Procesamiento Digital de Imágenes
Texto completo
Figure

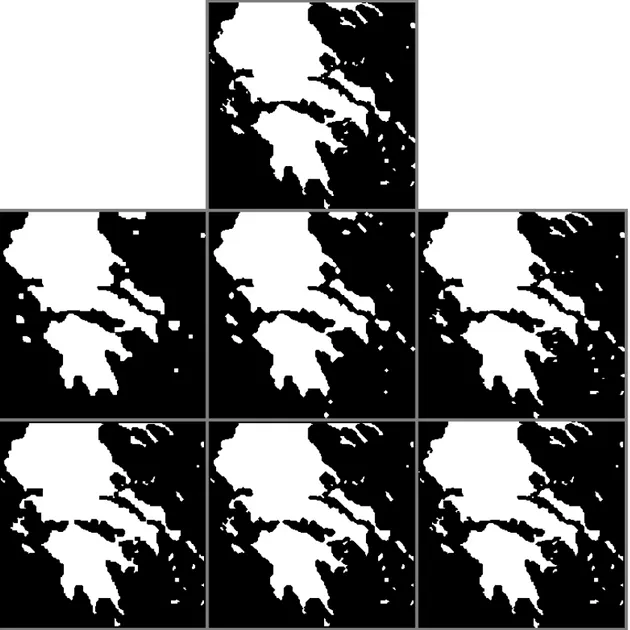
![Figura 2.2: a) Subconjunto de puntos del producto cartesiano [−6, 6] × [−6, 9] ⊂ Z 2](https://thumb-us.123doks.com/thumbv2/123dok_es/5761253.141272/25.918.140.771.150.814/figura-subconjunto-puntos-producto-cartesiano-z.webp)
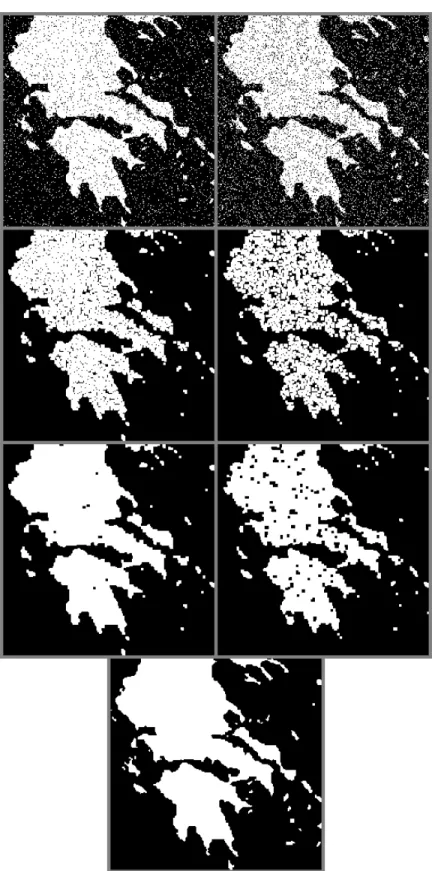
![Figura 2.3: a)Subconjunto de puntos del producto cartesiano [−7, 15] × [−6, 6] ⊂ Z 2](https://thumb-us.123doks.com/thumbv2/123dok_es/5761253.141272/28.918.150.774.193.764/figura-subconjunto-puntos-producto-cartesiano-z.webp)



Documento similar
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
[r]
SVP, EXECUTIVE CREATIVE DIRECTOR JACK MORTON
Social Media, Email Marketing, Workflows, Smart CTA’s, Video Marketing. Blog, Social Media, SEO, SEM, Mobile Marketing,
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
