Impacto de la utilización de múltiples radios en algoritmos de Rendezvous ciegos
68
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Impacto de la utilización de múltiples radios en algoritmos de Rendezvous ciegos Autor: Julio Cesar Pérez García E-mail: [email protected]. Tutor: Msc. Erik Ortiz Guerra E-mail: [email protected]. Santa Clara 2015 "Año 57 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento de Telecomunicaciones y Electrónica.. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “No entiendes realmente algo a menos que seas capaz de explicárselo a tu abuela.” Albert Einstein.
(5) ii. DEDICATORIA. A mi madre por su dedicación y sacrificio….
(6) iii. AGRADECIMIENTOS. A mi madre, mi hermana, mi abuela y a toda mi familia en general, especialmente a mi tío Ángel en su memoria. A mi novia y su familia sin ellos no hubiese sido posible esta tarea. A todos los que han cooperado en mi formación profesional, especialmente a mi tutor Erik por su paciencia. A mis compañeros Antonio Pacheco, Roberto, Hugo, Rigoberto, Yadalis, Glenda y todos los que me ayudaron en algún momento durante la carrera. A todos muchas Gracias..
(7) iv. TAREA TÉCNICA. Con el propósito de cumplir los objetivos trazados para la realización de esta tesis, se tomaron en cuenta para la confección del informe final las siguientes tareas técnicas: . Caracterización del Rendezvous ciego en redes radio cognitivas.. . Caracterización de algunos algoritmos de Rendezvous ciegos propuestos en los últimos años.. . Análisis de las ventajas de la utilización de múltiples radios en algoritmos de Rendezvous ciegos.. . Generalización de algunos algoritmos de Rendezvous ciegos para que se implementen con múltiples radios.. . Evaluación mediante simulación de eventos discretos del desempeño de los algoritmos generalizados.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La Radio Cognitiva surge para mitigar el problema de la ineficiencia espectral existente. El Rendezvous es el proceso esencial en las redes radio cognitivas, especialmente el Rendezvous ciego, el cual debe garantizar el Rendezvous en escenarios descentralizados y sin sincronismo entre usuarios. En el presente trabajo se estudia el impacto de la utilización de múltiples radios en los algoritmos de Rendezvous ciegos, generalizando los algoritmos SSB y el FDCH-CS para su implementación con más de dos radios. Los algoritmos generalizados y el Aleatorio fueron evaluados mediante simulación de eventos discretos y comparados con el RPS, el cual está diseñado para utilizar cualquier cantidad de radios. En todos los escenarios simulados el aumento del número de radios resultó en una disminución del ETTR y el MTTR, aunque la mejora es cada vez menos significativa a medida que se incrementaba el total de radios por usuario. Cuando el número total de radios se incrementa de dos a tres la mejora en términos de ETTR es de un 50 por ciento para la mayoría de los algoritmos simulados, sin embargo para totales de radios superiores a seis la mejora no supera al 30 por ciento, exceptuando el algoritmo Aleatorio..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. GENERALIDADES DE LAS REDES RADIO COGNITIVAS .............. 4. 1.1 Regulación y ocupación del espectro radioeléctrico..................................................... 4 1.2 Definición y evolución de Radio Cognitiva ................................................................. 5 1.2.1 Características de la Radio Cognitiva .................................................................... 6 1.2.2 Ciclo cognitivo ....................................................................................................... 7 1.3 Arquitectura de redes radio cognitivas ......................................................................... 9 1.4 El Rendezvous en redes radio cognitiva ...................................................................... 10 1.4.1 Clasificación de los algoritmos de Rendezvous ................................................... 11 1.4.2 Arquitectura de los algoritmos de Rendezvous .................................................... 11 1.5 Algoritmos de Rendezvous ciegos .............................................................................. 13 1.6 Utilización de múltiples radios en Rendezvous ciego ................................................. 16 1.7 Consideraciones finales del capítulo........................................................................... 18 CAPÍTULO 2.. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS 19.
(10) vii 2.1. Modelación del sistema .......................................................................................... 19. 2.2. Selección de los algoritmos .................................................................................... 20. 2.3. Descripción del algoritmo Aleatorio ...................................................................... 21. 2.3.1 Generalización del algoritmo Aleatorio para utilizar múltiples radios ................ 22 2.4. Descripción del algoritmo SSB .............................................................................. 23. 2.4.1. Generalización del algoritmo SSB para utilizar múltiples radios ................... 24. 2.5. Descripción del algoritmo RPS .............................................................................. 25. 2.6. Descripción del algoritmo FDCH-CS .................................................................... 27. 2.6.1 Generalización del algoritmo FDCH-CS para utilizar múltiples radios .............. 30 2.7 Consideraciones finales del capítulo........................................................................... 31 CAPÍTULO 3.. EVALUACIÓN Y COMPARACIÓN DE LOS ALGORITMOS .......... 32. 3.1. Entornos de simulación de los algoritmos ............................................................. 32. 3.2. Resultados del modelo Ideal .................................................................................. 34. 3.3. Resultados del modelo Simétrico ........................................................................... 36. 3.4 Resultados del modelo Asimétrico ............................................................................. 41 3.5 Conclusiones del capítulo ........................................................................................... 45 CONCLUSIONES Y RECOMENDACIONES ................................................................... 47 Conclusiones ..................................................................................................................... 47 Recomendaciones ............................................................................................................. 48 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 49 ANEXOS .............................................................................................................................. 51 Anexo I Anexo II. Código de los simuladores programados en MATLAB ................................. 51 Resultados de los escenarios con 25 canales disponibles (G=25)............... 57.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. El crecimiento que se ha evidenciado durante los últimos años de nuevas técnicas de radiocomunicaciones y servicios, ha dado lugar a la asignación y consecuente agotamiento de las bandas de frecuencia del espectro radioeléctrico utilizadas para las comunicaciones inalámbricas. Con la actual distribución estática del espectro, la mayoría del espectro licenciado está subutilizado en la mayor parte del tiempo mientras que las bandas no licenciadas se encuentran abarrotadas de usuarios. La Radio Cognitiva surge como una solución para mitigar el problema, con ella los usuarios que no poseen licencia (o usuarios cognitivos), pueden identificar y acceder a las porciones vacantes del espectro en los momentos en que no se estén utilizando por los usuarios que sí poseen licencia para operar en dichas bandas (o usuarios primarios) [1]. Para que la comunicación entre dos usuarios cognitivos se efectúe es necesario que sus respectivos dispositivos de radio estén sintonizados en un mismo canal del espectro, el tiempo suficiente para que estos intercambien la información de handshake y la negociación pertinente para continuar la comunicación. El proceso mediante el cual los usuarios cognitivos coinciden en un canal común e intercambian dicha información es conocido como Rendezvous término proveniente del francés que significa reunión o encuentro. El Rendezvous constituye el proceso principal en redes radio cognitivas, debido a que si los usuarios no coinciden en un mismo canal no se puede efectuar la comunicación. Una variante para lograr el Rendezvous lo constituye el empleo de un canal de control común, en esta variante los usuarios cognitivos eligen un canal pre-asignado para establecer la comunicación. El establecimiento y mantenimiento de un canal suele ser una tarea difícil en las redes radio cognitivas, por lo que en los últimos años han sido consideradas las secuencias de salto de canal como una alternativa frente al canal de control común. En las.
(12) INTRODUCCIÓN. 2. secuencias de salto de canal cada usuario cognitivo emplea una secuencia de salto de canal e intenta coincidir con el otro usuario cognitivo en un mismo canal, esta alternativa es denominada Rendezvous ciego [2]. La mayoría de los algoritmos de Rendezvous ciegos consideran que cada usuario está equipado con un único dispositivo de radio, pero en los últimos años, los avances tecnológicos en la fabricación de radios han traído consigo un decremento en los costos de fabricación de estos dispositivos (transceivers inalámbricos), lo cual puede ser explotado y con bajos costos (costo de los radio extras), se puede minimizar el tiempo para el Rendezvous (TTR, Time to Rendezvous) y los valores asociados a este, o sea el tiempo esperado para el Rendezvous (ETTR, Expected TTR) y el máximo tiempo para Rendezvous (MTTR, Maximum TTR ), los que constituyen las métricas fundamentales de los algoritmos de Rendezvous. El empleo de múltiples radios permite a los usuarios realizar más de un rol en la comunicación, ya que pueden transmitir y recibir al mismo tiempo. El objetivo general del presente trabajo es evaluar el impacto de la utilización de múltiples radios en algoritmos de Rendezvous ciegos. Para dar cumplimiento al objetivo general fueron trazados los siguientes objetivos específicos: Caracterizar el Rendezvous ciego en redes radio cognitiva. Caracterizar algunos algoritmos de Rendezvous ciegos. Analizar las ventajas de la utilización de múltiples radios en algoritmos de Rendezvous ciegos. Generalizar algunos algoritmos de Rendezvous ciegos para que puedan ser implementados con múltiples radios. Evaluar mediante simulación el desempeño de los algoritmos generalizados. Con la culminación de esta investigación se contará con un material en el que se implementan con múltiples radios algoritmos que actualmente utilizan un único radio, a la vez se tendrá una comparación de dichos algoritmos en diferentes escenarios pudiendo ser utilizados por investigadores con el objetivo de elegir en su momento cuál de ellos es el más adecuado para determinado escenario. La realización de esta investigación no requerirá recursos adicionales a los ya existentes en la Facultad de Ingeniería Eléctrica, además para.
(13) INTRODUCCIÓN. 3. la ejecución de las pruebas necesarias se empleará la simulación de eventos discretos con el objetivo de viabilizar la obtención de resultados sin gasto económico alguno. La memoria escrita está estructurada en introducción, tres capítulos, conclusiones, recomendaciones, bibliografía y anexos. En el primer capítulo se abordan generalidades de ocupación y regulación del espectro radioeléctrico, donde se analiza el problema de ineficiencia espectral que provocan las incorrectas reglas existentes para la asignación del espectro radioeléctrico, además se define el estado del arte de las redes radio cognitivas como solución al problema de escasez de espectro para las comunicaciones inalámbricas y los retos que enfrentan los dispositivos radio cognitivos para convivir con los usuarios licenciados circundantes y se profundiza en los métodos para alcanzar el Rendezvous y la posible utilización de múltiples radios para mejorar el desempeño de los algoritmos existentes. En el segundo capítulo se describen los algoritmos de Rendezvous ciegos que se utilizan en las simulaciones y se generalizan algunos de ellos para su implementación con múltiples radios. En el capítulo tres se muestran los resultados obtenidos mediante la simulación de los diferentes algoritmos descritos y se comparan en términos ETTR y MTTR. En las conclusiones y las recomendaciones se pretende hacer una valoración del alcance de este trabajo y su posible expansión hacia futuras investigaciones..
(14) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 4. CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. En este capítulo se abordan los conceptos más relevantes de la Radio Cognitiva, el Rendezvous ciego y la posible utilización de múltiples radios por parte de un usuario para mejorar el desempeño de los algoritmos de Rendezvous ciegos existentes. En el primer epígrafe se abordan las legislaciones que norman el espectro y los problemas que provocan las formas estáticas de asignación del espectro por parte de las mismas. Luego en los epígrafes siguientes se muestra la evolución de la Radio Definida por Software hasta llegar a la Radio Cognitiva, luego se caracterizan las redes radio cognitivas en cuanto a su arquitectura y los principales desafíos que deben enfrentar. Finalmente se aborda el Rendezvous ciego como solución a los problemas de las redes radio cognitivas y de la posible implementación de los mismos con múltiples radios. 1.1 Regulación y ocupación del espectro radioeléctrico En la mayoría de los países el espectro radioeléctrico se gestiona a través de un sistema de asignación, distribuciones y autorizaciones de frecuencias. El espectro radioeléctrico total está dividido en bloques o bandas de frecuencias establecidas para un tipo de servicio particular en el proceso de asignación de frecuencias. Estas asignaciones generales pueden ser subdivididas en bandas designadas para un servicio particular. Las asignaciones refieren la subdivisión final del espectro radioeléctrico, donde a cada cliente se le otorga una autorización o licencia para efectuar la transmisión de radio en un canal específico, o grupo de canales en una ubicación determinada bajo condiciones específicas y por tiempo generalmente largo..
(15) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 5. Cada país tiene un cuadro nacional de atribución de bandas de frecuencias, conforme lo acordado en las Conferencias Mundiales de Radiocomunicaciones [3] de la UIT (Unión Internacional de Telecomunicaciones) [4]. Estudios han demostrado que gran parte del espectro asignado está subutilizado, observándose grandes variaciones temporales y geográficas en su utilización. Según la FCC (Federal Communications Commission) las variaciones en la utilización del espectro están comprendidas entre 15 y 85 por ciento [5]. Lo que provoca que existan gran cantidad de bandas sin utilización permanente y una gran concentración en las que sí se utilizan la mayor parte del tiempo, incluso en bandas por debajo de los 3GHz, las cuales son particularmente valiosas para los sistemas inalámbricos debido a sus favorables características de propagación, por ejemplo la banda GSM (Global System for Mobile Communications) para sistemas celulares y la ISM (Industrial, Scientific and Medical) para Wifi, Bluetooth y microondas, están fuertemente utilizadas, mientras otras bandas como las destinadas a radioaficionados, televisión y otras están subutilizadas parte del tiempo y en diferentes lugares geográficos [6]. 1.2 Definición y evolución de Radio Cognitiva El crecimiento que se ha evidenciado durante los últimos años de nuevas técnicas de radiocomunicaciones y servicios y la política de asignación de espectro, ha dado lugar a la asignación y consecuente agotamiento de las bandas de frecuencia del espectro radioeléctrico utilizadas para las comunicaciones inalámbricas.Como solución a esta realidad surge el desafío de obtener una radio capaz de utilizar el hardware en una forma genérica y de reconfigurarse mediante software en distintos momentos. Joseph Mitola define en [7] el concepto de Radio Software (SR, Software Radio) como una radio en el que sus formas de ondas de modulación son definidas por un software. En un sistema SR la digitalización de la señal se realiza en la antena. Sin embargo, el estado actual de la tecnología hace que un sistema SR Ideal no se pueda implementar, surge entonces la idea de la Radio Definida por Software (SDR, Software Defined Radio) que es una versión de un SR que se puede implementar con la tecnología disponible, donde la conversión se realiza en la etapa de Frecuencia Intermedia (FI), tras un filtrado selectivo..
(16) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 6. Un sistema SDR está compuesto por tres bloques fundamentales, los cuales se muestran en la Figura 1.1, la etapa de RF se encarga de transmitir/recibir las señales de radiofrecuencia, para adecuarlas y convertirlas a FI en el caso de recepción o para ser amplificadas y moduladas en caso de transmisión, siendo acomodadas para su posterior transmisión por radio, los encargados de este proceso de acomodo son los bloques ADC (Analog to Digital Converter) y DDC (Digital Down Conversion) en el caso de recepción y el DAC (Digital to Analog Converter) y el DUC (Digital Up Conversion) en el caso de transmisión [8].. Antena. Sección RF. Sección IF. Sección RF. Rx ADC. Entrada y Salida de radiofrecuencias. DDC. Procesamiento en banda base Tx. DAC. DUC. Figura 1.1. Diagrama en bloques de Radio Definida por Software. Adaptada de Figura 1.1 en [8]. La Radio Cognitiva es un sistema SDR cognitivo. Joseph Mitola en [9] en el año 1999 define la Radio Cognitiva como un radio que puede cambiar sus parámetros basado en interacciones con el entorno en que opera. Existen varias definiciones de Radio Cognitiva [10, 11], pero todas convergen en que debe ser un dispositivo capaz de detectar las necesidades de comunicación del usuario y luego mediante la adquisición de conocimiento (información) de su entorno, disponer los mecanismos para satisfacer dichas necesidades. La Radio Cognitiva surge como solución a los problemas de disponibilidad e ineficiencia espectral, utilizando las bandas autorizadas sin interferir con las redes de usuarios con licencia. La Radio Cognitiva posibilita el uso temporal del espectro vacante, o sea las porciones del espectro que no están siendo utilizadas. 1.2.1 Características de la Radio Cognitiva Para que la Radio Cognitiva tenga todas las habilidades que se requieren es necesario que posea capacidad cognitiva y la capacidad de auto reconfigurarse, para poder adaptarse.
(17) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 7. fácilmente al ambiente de radio dinámico y no interferir las comunicaciones de otros usuarios. La capacidad cognitiva se refiere a la habilidad de la tecnología de la radio para capturar la información del entorno circundante. La misma hace que los dispositivos radio cognitivos sean conscientes de la forma de onda transmitida, el espectro de radiofrecuencias, el tipo de protocolo de la red de comunicación, la información geográfica, los recursos y servicios disponibles localmente, las necesidades de los usuarios, las políticas de seguridad y de toda la información posible del ambiente de trabajo. La capacidad cognitiva provee conciencia del espectro mientras que la capacidad de reconfigurabilidad pone la radio en condiciones de estar dinámicamente programada según el entorno. Dentro de los parámetros reconfigurables de la Radio Cognitiva están la frecuencia de transmisión, el esquema de modulación, la potencia de transmisión y la tecnología de comunicación. Los parámetros de transmisión de un dispositivo radio cognitivo pueden ser reconfigurados no sólo al inicio de la transmisión, sino también durante la misma. Según las características del espectro, estos parámetros se reconfiguran para garantizar la comunicación sin interferir en la comunicación de otros usuarios del entorno [8]. 1.2.2 Ciclo cognitivo La Radio Cognitiva necesita ciertas funciones de gestión del espectro que forman el ciclo cognitivo [5]. Los elementos que conforman el ciclo cognitivo son cuatro funciones de gestión del espectro: análisis, decisión, compartición y movilidad del espectro. Análisis del espectro: El dispositivo radio cognitivo debe monitorear las bandas disponibles y detectar huecos del espectro como muestra la Figura 1.2, existen agujeros espectrales en la frecuencia y en el tiempo. El análisis del espectro es la funcionalidad básica de los dispositivos radio cognitivos, debido a que brinda la información del espectro circundante, que es utilizada por las otras funciones del ciclo y es quien define el comportamiento del dispositivo. Decisión del espectro: Una vez que se ha identificado el espectro disponible mediante el análisis del espectro, el dispositivo radio cognitivo selecciona la banda más apropiada para sus requerimientos de calidad de servicio (QoS, Quality of Service). Es importante.
(18) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 8. caracterizar la banda del espectro de acuerdo al ambiente de radio y al comportamiento estadístico de los usuarios que poseen licencia, ya que para implementar un algoritmo que incorpore características de espectro dinámico, se necesita obtener a priori información acerca de la actividad de los usuarios con licencia para no interferirlos. frecuencia. tiempo Espectro en uso. Figura 1.2. Representación de agujeros espectrales en tiempo y en frecuencia. Adaptada de Figura 3 de [5]. Compartición del espectro: El dispositivo radio cognitivo debe coordinar sus transmisiones para evitar colisiones e imbricaciones de sus señales con las de otros usuarios. Esta función permite compartir los recursos espectrales por parte de múltiples usuarios y evita la interferencia con usuarios con licencia. Para que se pueda compartir el espectro es necesario un protocolo de control de acceso al medio (MAC, Medium Access Control), que puede incluso repartir las tareas de análisis del espectro y determinar los tiempos de transmisión entre otras acciones. Movilidad del espectro: Cuando se detecta mediante el análisis del espectro actividad de un usuario que posea licencia para operar en alguna banda, los dispositivos radio cognitivos deben inmediatamente cambiarse a otra porción vacante del espectro y continuar la comunicación en dicha banda. La movilidad del espectro necesita un plan de handoff para detectar el fracaso del enlace e intercambiar la transmisión actual para una nueva ruta o una nueva banda del espectro con degradación mínima de calidad. Además, esta funcionalidad necesita un plan administrativo de conexión para sostener la función de protocolos de las capas superiores, mitigando la influencia de alternación del espectro..
(19) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 9. 1.3 Arquitectura de redes radio cognitivas Los componentes de la arquitectura de la red radio cognitiva (CRN, Cognitive Radio Network), se pueden separar en dos grupos: la red primaria (con licencia) y la red cognitiva ver Figura 1.3. En la red primaria los usuarios poseen una licencia para operar en una determinada banda del espectro. Los usuarios que forman parte de la red secundaria son los que están equipados con un dispositivo radio cognitivo y se nombran usuarios cognitivos o secundarios (US) [5]. Banda que no requiere licencia. Cooperación Servidor. Banda que requiere licencia I. Acceso a la Red Primaria. Otras CRN. Estación Base de la CRN. Estación Base de la Red Primaria. Banda que requiere licencia II Usuario Cognitivo. Acceso ad-hoc. Usuario Primario. Sistema Distribuido. Sistema Centralizado. Figura 1.3. Diagrama de una red radio cognitiva heterogénea. Adaptada de Figura 6 de [5]. Como muestra la Figura 1.3 los US pueden acceder a las partes del espectro utilizado por los UP y también a las partes que no requieren licencia. En consecuencia, los tipos de operación de los US pueden ser divididos en operación en bandas con licencia y sin licencia respectivamente. La banda con licencia se utiliza principalmente por la red primaria. Por lo tanto, la red secundaria se enfoca principalmente en la detección de los usuarios de la red primaria para la detección de las porciones vacantes de la banda..
(20) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 10. En la capacidad del canal que perciben los UP, influye directamente la interferencia por parte de la red secundaria en las inmediaciones de los mismos, por lo que si los UP reclaman la utilización de la banda del espectro ocupado por los US, estos últimos deben abandonar inmediatamente dicha banda y moverse a otra disponible. En ausencia de UP, los US tienen el mismo derecho de acceder al espectro, por lo que los métodos para compartir el espectro son imprescindibles para los usuarios cognitivos. Los US deben coexistir no solo con los UP, sino que además, con otros US [5]. 1.4 El Rendezvous en redes radio cognitivas Los US de una CRN deben detectar la presencia de otros usuarios dentro de la red, para intercambiar la información necesaria para que se comparta el espectro o para la transmisión de datos propiamente. Es imprescindible para que la comunicación se efectúe, que los radios de los respectivos usuarios estén sintonizados en un mismo canal. Al proceso en el que los radios de dos o más usuarios se encuentran y establecen un vínculo de comunicación en un canal común es llamado Rendezvous, operación fundamental en CRN, debido a que sería imposible la comunicación sin el Rendezvous de los usuarios [12]. Debido a la heterogeneidad y variabilidad del entorno radioeléctrico, el Rendezvous no es un proceso trivial, los canales disponibles de cada usuario cambian dinámicamente con el tiempo, además la posición geográfica de cada usuario no es usualmente la misma y puede que algún usuario posea canales disponibles en una región geográfica que no posee otro de distinta ubicación. De acuerdo a la disponibilidad de canales que posean los usuarios las CRN se dividen en dos modelos: el modelo Simétrico y el modelo Asimétrico. El modelo Simétrico es donde todos los US de una CRN tienen la misma disponibilidad de espectro, o sea perciben las mismas porciones vacantes del espectro, en este trabajo se denomina modelo Ideal a los escenarios con un modelo Simétrico en el cual todos los canales están disponibles para los US. El modelo Simétrico aparece usualmente cuando los US tienen relativa proximidad geográfica con respecto a los UP [1]. Por otra parte el modelo Asimétrico es en el que todos los US que conforman la CRN no poseen la misma disponibilidad de canales y es el modelo más común en la práctica..
(21) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 11. 1.4.1 Clasificación de los algoritmos de Rendezvous La Figura 1.4 muestra la clasificación para los algoritmos de Rendezvous existentes, teniendo en cuenta si la CRN es centralizada o no y si utiliza o no un canal de control común (CCC, Common Control Channel) [2].. Algoritmos de Rendezvous. Sistema Centralizado. Con CCC. Sin CCC. Sistema Descentralizado. Sin CCC (Rendezvous ciego). CCC Global. Con CCC. CCC Local. Figura 1.4. Clasificación de los algoritmos de Rendezvous. Adaptado de Figura 1 de [2]. 1.4.2 Arquitectura de los algoritmos de Rendezvous En dependencia de la existencia o no de un centralizador (estación base) la CRN se clasifica en centralizada o descentralizada. Como muestra la Figura 1.5 en una arquitectura descentralizada los US se comunican con cada uno de los otros de modo ad-hoc, sin la existencia de un centralizador como ocurre en el caso de las CRN centralizadas, donde los US se comunican con sus estaciones base y pueden realizar operaciones periódicamente para la gestión del espectro. Las estaciones base secundarias pueden ser interconectadas a través de una red troncal inalámbrica o cableada. La mayoría de los sistemas centralizados, tales como DIMSUMNet [13] y DSAP [14] requieren de un servidor para operar sobre un CCC predeterminado, el cual es bien conocido y es accesible para todos los usuarios en la CRN. Técnicamente el CCC se puede establecer en un canal sin licencia (banda ISM) o en una banda específica con licencia para la aplicación [14]. Aunque la utilización de un CCC facilitaría el proceso de Rendezvous tiene varios inconvenientes, por ejemplo, la colocación del CCC en una banda que no requiera licencia solo agravaría la congestión en dicha banda,.
(22) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 12. por otra parte a colocación y mantenimiento del CCC en una banda que requiera licencia no es viable, generalmente debido a que la disponibilidad de canales de cada usuario varía dinámicamente con el tiempo y con la posición geográfica, además un CCC sería vulnerable a los ataques de jamming y un fácil punto de falla para el sistema [2].. Usuario Primario. Usuario Primario. CRN Usuarios Secundarios CRN Descentralizada. Centralizador CRN Centralizada. Figura 1.5. Diagrama de CRN Centralizada y Descentralizada. Elaboración propia. Algunos algoritmos proponen métodos para sistemas centralizados sin la utilización de un CCC, la idea básica de dichos métodos consiste en que cada US encuentre un canal buscando de menor a mayor en el rango de frecuencias y cuando encuentre un canal disponible luego del análisis de espectro, espere en dicho canal el tiempo suficiente para que se encuentre con el servidor, si el canal está disponible para el US y para el servidor entonces la comunicación se establecerá en este canal [2]. Los sistemas centralizados son fáciles de implementar pero débiles en cuanto a robustez y escalabilidad. Generalmente el servidor se convierte en un cuello de botella para la comunicación, además una falla en el servidor colapsaría toda la red. En los sistemas distribuidos se puede utilizar un CCC global de la misma manera que en los sistemas centralizados, con la idea que si un par de usuarios desea comunicarse con otro se reúnen en el CCC e intercambian la información de control, debido a lo difícil que resulta establecer un canal común a todos los usuarios dadas las variaciones dinámicas de sus respectivas disponibilidad de canales, los autores en [15] proponen agrupar los US, de.
(23) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 13. modo que para cada uno de los grupos exista un CCC local por el que puedan establecer comunicación con cada uno de los miembros de su grupo. La creación de los grupos conlleva un gran costo computacional y de tiempo. Debido a los inconvenientes que conllevan el establecimiento y mantenimiento de los CCC en las CRN descentralizadas, en los últimos tiempos se ha extendido el estudio de los métodos que no requieren de un CCC, nombrados Rendezvous ciegos, los cuales se basan fundamentalmente en técnicas de salto de canal (CH, Channel Hopping), en las que cada US sigue una secuencia de saltos de canal hasta lograr Rendezvous con el otro US, con que se desea comunicar. La clave de las técnicas de CH radica en el algoritmo utilizado para generar la secuencia de salto, la cual debe guiar a dos US cualesquiera a saltar a un mismo canal, en una misma ranura de tiempo y lo más pronto posible [2]. 1.5 Algoritmos de Rendezvous ciegos El Rendezvous ciego se basa fundamentalmente en técnicas de CH. La clave de las técnicas de CH radica en el algoritmo utilizado para generar la secuencia de CH, la cual debe guiar a dos US cualesquiera a saltar a un mismo canal, en una misma ranura de tiempo lo más pronto posible [2]. La Figura 1.6 muestra la clasificación del Rendezvous ciego de acuerdo a si requiere o no sincronización entre los US [2].. Rendezvous ciego. Algoritmo Aleatorio. No Requiere Sincronización. Aplicable solo al modelo Simétrico. Requiere Sincronización. Aplicable al modelo Simétrico y Asimétrico. Figura 1.6. Clasificación de los Algoritmos de Rendezvous ciegos. Adaptada de Figura 1 de [2]..
(24) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 14. Un algoritmo de CH trivial es el Aleatorio, donde cada usuario conforma su propia CH escogiendo aleatoriamente, en cada ranura de tiempo, uno de sus canales disponibles e intentando el Rendezvous en dicho canal. Este método es aplicable a cualquier escenario. El principal inconveniente de este tipo de algoritmos es que no garantizan el Rendezvous en un tiempo finito. El algoritmo AMRCC [16] es un algoritmo aleatorio mejorado, que sigue la idea que los canales con menor probabilidad de interferir con un UP posean mayor chance de ser seleccionados para formar la CH. Pero el algoritmo AMRCC [16] tampoco garantiza el Rendezvous en un tiempo finito [17]. Algunos de los algoritmos de Rendezvous ciegos existentes requieren de sincronización en el tiempo entre los US, pero debido a la heterogeneidad de la red es muy complicado lograr una sincronización de todos los US en una CRN descentralizada. Si la sincronización es realizable existen varios algoritmos que garantizan el Rendezvous, entre los más representativos están los algoritmos propuestos por los autores de [18] los cuales utilizan sistemas basados en quorum para garantizar el Rendezvous, estos algoritmos son el M-QCH y el L-QCH [17]. Debido al problema que supone la sincronización se han desarrollado algoritmos que no requieran de la misma. Uno de los más representativos es el propuesto en [19] y luego llamado por los autores de [20] como GOS (Generated Orthogonal Sequence). Algunos algoritmos utilizan una idea conocida como camino en anillo (RW, Ring-walk) [21], donde cada canal es representado por un vértice en un anillo y los US visitan los vértices (canales) con diferentes velocidades y el Rendezvous se garantiza porque los US rápidos alcanzan a los de menor velocidad de salto, variantes de estos algoritmos son los propuestos en [1, 21] los que poseen mejor rendimiento que el GOS. Las técnicas de RW requieren que los usuarios posean una identificación única para cada nodo, para luego establecer su velocidad y además que conozca la cantidad de canales máxima que posee la red [2]. Los autores en [16] proponen el algoritmo MC (modular clock) y la versión modificada MMC, para los modelos Simétricos y Asimétricos, estos algoritmos se basan en la idea que cada US toma un número primo P y aleatoriamente una razón r, con r menor que P, basado en estos parámetros cada usuario construye su CH, con la regla que si se encuentra en un canal i salta en la próxima ranura de tiempo al canal ((i+r) mod P). Este algoritmo para el.
(25) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 15. modelo Asimétrico garantiza el Rendezvous en un tiempo menor que P. Estos algoritmos poseen el inconveniente que si los US seleccionan los mismos valores para P y r no se garantiza el Rendezvous en un tiempo finito [2]. Otros algoritmos han sido propuestos para resolver el problema del Rendezvous ciego como son el DRSEQ (Deterministic Rendezvous Sequence) [19] y el CRSEQ (Channel Rendezvous Sequence) [14]. Estos algoritmos no poseen un MTTR satisfactorio para el modelo Simétrico [2]. En [17] se propone el algoritmo Jump-Stay que garantiza el Rendezvous en un tiempo finito en escenarios Simétricos y Asimétricos, la idea de dicho algoritmo es generar la secuencia en rondas y cada ronda consta de un patrón de salto y un patrón de estancia, los cuales son subconjuntos de la secuencia. Los US continuamente saltan (intentan Rendezvous) a los canales disponibles durante el patrón de salto y se detienen en un canal especifico mientras dure el patrón de estancia. Los usuarios primero desarrollan el patrón de salto y posteriormente el de estancia en cada ronda. Este algoritmo posee diversidad máxima, o sea el Rendezvous se puede alcanzar en cualquiera de los canales disponibles. En [22] los mismos autores de [17] proponen el EJS (Enhanced Jump Stay), que también garantiza diversidad máxima y posee mejor desempeño que el Jump-Stay en términos de los valores relacionados al TTR (MTTR y ETTR) en el modelo Asimétrico, pero incrementa ligeramente el MTTR en el modelo Simétrico [1]. En [23] se introduce el algoritmo FRCH (Fast Rendezvous Channel Hopping), que posee mejores valores de ETTR que el JumpStay, pero no garantiza diversidad máxima. Los autores en [24] proponen el algoritmo SSB (Short Sequences Based) que obtiene mejores valores de ETTR y MTTR que los algoritmos FRCH y el EJS, pero no garantiza diversidad máxima tampoco [1]. La mayor parte de los algoritmos reportados implícitamente asumen que cada US está equipado con un único radio, debido a que los algoritmos generan una única salida (canal a intentar Rendezvous) en cada ranura de tiempo. Si en lugar de utilizar un único radio los algoritmos se implementaran con múltiples radios, debido a que se puede intentar el Rendezvous en más de un canal a la vez, esto puede ayudar a reducir el TTR de los algoritmos de Rendezvous ciegos, los cuales son muy necesarios en redes radio cognitivas debido a que garantizan el Rendezvous en redes heterogéneas, incluso sin sincronismo entre los usuarios [1]..
(26) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 16. 1.6 Utilización de múltiples radios en Rendezvous ciego Los avances tecnológicos han traído consigo una disminución en el costo de fabricación de los dispositivos de radio lo cual puede ser explotado de modo que se logre una mejora significativa en el proceso de Rendezvous con bajos costos [25]. La utilización de múltiples radios se puede mejorar los valores asociados al TTR (ETTR y MTTR). Cuando un US esté equipado con más de un dispositivo de radio podrá realizar diferentes roles en la comunicación debido a que podrá actuar como receptor y como transmisor a la vez. En [25] se definen dos métodos de implementación de los algoritmos con múltiples radios, el método de secuencia paralela y el de secuencia independiente. El método de secuencia independiente aplica una secuencia de CH diferente en cada radio, dichas secuencias son generadas por alguno de los algoritmos existentes. Con esta estrategia cada radio es tratado como un usuario virtual independiente intentando el Rendezvous, lo cual provoca una mejora en el TTR. La Figura 1.7 muestra el seudocódigo que ilustra la implementación de dicho método. Secuencia Independiente 1: Entrada: N, k, Q u u 𝑢 𝑢 2: t=1; Stu = {St1 , St2 , St3 , … , Stk };. 3: S𝑄𝑖 , i ∈ (1, k)// la i-ésima secuencia generada por Q. 4: while (no Rendezvous) 5: for i=1 to k u 6: St,i =S𝑄𝑖 (𝑡);. 7:end 8: t=t+1; 9: Intentar Rendezvous en Stu 10: end 6: end while 7: Salida 𝑆𝑡𝑢 Figura 1.7. Seudocódigo del método de secuencia independiente. Adaptado de [25]. 7:.
(27) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. 17. Donde 𝑁 es el total de canales disponibles, 𝑘 el número de radios que posee el usuario u y 𝑢 𝑢 𝑢 Q es el algoritmo a implementar. Sea 𝑆𝑡𝑢 = {𝑆𝑡,1 , 𝑆𝑡,2 , … , 𝑆𝑡,𝑘 } los canales visitados por el 𝑢 US 𝑢 en la ranura de tiempo 𝑡, donde 𝑆𝑡,ℎ representa el canal visitado por el US 𝑢 con el. radioℎen la ranura de tiempo 𝑡. En la línea tres k radios siguen k secuencias de CH independientes y en cada ranura de tiempo el radio 𝑖 intenta el Rendezvous en el canal que le corresponde en la secuencia iésima. Como se demuestra en [25] si 𝑀𝑇𝑇𝑅𝑘 es el MTTR de la implementación con 𝑘 radiosdel algoritmo 𝑄y 𝑀𝑇𝑇𝑅1 , el MTTR del algoritmo 𝑄 implementado con un solo radio, entonces el𝑀𝑇𝑇𝑅𝑘 no será menor que el 𝑀𝑇𝑇𝑅1 , por lo que este método mejora el ETTR pero no el MTTR, esto hace que no sea apropiado utilizar esta estrategia [25]. En el método con secuencia paralela como muestra el seudocódigo de la Figura 1.8 el algoritmo 𝑄 genera una única secuencia de CH (línea 3) y luego la secuencia es implementada por todos los radios a la vez. Secuencia Paralela 1: Entrada: N, k, Q u u 𝑢 𝑢 2: t=1; Stu = {St1 , St2 , St3 , … , Stk };. 3: SQ ; //secuencia generada por Q. 4: while (no Rendezvous) 5: for i=1 to k u 6: St,i =SQ ((𝑡 − 1) × 𝑘 + 𝑖);. 7:end 8: t=t+1; 9: Intentar Rendezvous en Stu 10: end 6: end while 𝑢 Figura 1.8.𝑆Seudocódigo del método paralelo. Adaptado de [25]. 7: Salida 𝑡 Supongamos que la secuencia generada por el algoritmo 𝑄 es {𝑆1 , 𝑆2 , 𝑆3 , 𝑆4 , 𝑆5 , 𝑆6 … } y que el7:usuario está equipado con tres radios entonces en la primera ranura de tiempo los tres radios intentan el Rendezvous en los canales 𝑆1 , 𝑆2 y 𝑆3 respectivamente y en la próxima ranura de tiempo los tres radios saltan a 𝑆4 , 𝑆5 y 𝑆6 respectivamente y así sucesivamente..
(28) CAPÍTULO 1. GENERALIDADES DE LAS REDES RADIO COGNITIVAS. Como se demuestra en [25] el 𝑀𝑇𝑇𝑅𝑘 =. 𝑀𝑇𝑇𝑅1 𝑘. 18. . Actualmente no existen muchos. algoritmos que estén diseñados para utilizar varios radios, en [25] se propone el algoritmo identificado como RPS (Role-based Parallel Sequence) en el cual cada US está equipado con más de dos radios. Uno de los radios es marcado como receptor mientras que el resto son identificados como transmisores. En [1] los autores proponen una variante del algoritmo FDCH (Full Diversity Channel Hopping), identificada como FDCH-CS (Full Diversity Channel Hopping- Common Strategy), en la que se considera que cada US está equipado con dos radios y cada radio sigue una secuencia diferente para visitar los canales de la red. Los resultados obtenidos en [1] muestran que el algoritmo FDCH-CS obtiene menores valores de ETTR y MTTR que el algoritmo RPS. Sin embargo, el algoritmo FDCH-CS solo emplea dos radios mientras que, el algoritmo RPS, puede emplear tantos radios como estén disponibles para el US. 1.7 Consideraciones finales del capítulo La Radio Cognitiva surge para mitigar el problema de la insuficiencia espectral, causada por las políticas estáticas de asignación del espectro. Uno de los problemas que deben enfrentar las CRN es el problema del Rendezvous entre los US, las soluciones que implican la existencia de un CCC son vulnerables y difíciles de establecer y mantener, por lo que es necesario desarrollar algoritmos de Rendezvous ciegos, que además no requieran sincronismo entre los US debido a lo difícil que suele ser conseguirlo, dadas las características heterogéneas de las CRN. El hecho de que el precio de los radios haya disminuido en los últimos tiempos puede explotarse para mejorar el desempeño de los algoritmos de Rendezvous ciegos con bajos costos. Existen pocos algoritmos de Rendezvous ciegos que se hayan diseñado para su implementación con múltiples radios, por lo que se hace necesario generalizar los algoritmos existentes para que se puedan implementar con varios radios..
(29) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 19. CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. En este capítulo se describen algunos algoritmos de Rendezvous ciegos y se generalizan los algunos algoritmos para que se implementen con múltiples radios. En el epígrafe 2.1 se hace la modelación matemática del sistema, en los siguientes epígrafes se describen los algoritmos Aleatorio, SSB, RPS y el FDCH-CS y se generalizan el FDCH-CS y el SSB para que se puedan implementar con múltiples radios. 2.1. Modelación del sistema. Se considera una red radio cognitiva formada por 𝑀 ≥ 2 US que coexisten con algunos UP en la misma área geográfica. Desde el punto de vista de los US, el espectro se divide en 𝑁 ≥ 2 canales y se considera que no existe solapamiento entre canales adyacentes. Los US identifican de manera única cada uno de los canales de la red usando las etiquetas 0,1,2, … , 𝑁 − 1. Sea 𝐴𝑢 ⊆ {0,1,2, … , 𝑁 − 1} el conjunto de canales disponibles para el US 𝑢 ∈ {1,2, … , 𝑀} y 𝐺 el número de canales disponibles comunes para todos los US, de manera que: 𝐺 = |∩∀𝑢 𝐴𝑢 |, donde ∩∀𝑢 𝐴𝑢 denota la intersección entre el conjunto de canales disponibles de todos los US y |∙| es el operador de cardinalidad del conjunto, con G≠0 para que sea posible el Rendezvous. Se considera además que la comunicación es dividida en ranuras de tiempo de duración fija y cada US está equipado con 𝑘 ≥ 2 radios que son identificados como 2, 3, … , 𝑘 . Sea 𝑆𝑡𝑢 = 𝑢 𝑢 𝑢 𝑢 {𝑆𝑡,1 , 𝑆𝑡,2 , … , 𝑆𝑡,𝑘 } los canales visitados por el US 𝑢 en la ranura de tiempo 𝑡, donde 𝑆𝑡,ℎ. representa el canal visitado por el US 𝑢 con el radioℎen la ranura de tiempo 𝑡. Esta notación se utiliza durante la explicación de todos los algoritmos a lo largo del capítulo..
(30) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 20. Sea τ el tiempo necesario para intercambiar la información de handshake necesaria. Debido a que los US pueden no estar sincronizados se considera 2τ como la duración de una ranura de tiempo para asegurar que el solapado de cualquiera dos ranuras de tiempo sea suficiente para completar el proceso de Rendezvous [26], esto equivale a considerar que las ranuras de tiempo de los US están alineadas, aunque cada uno puede comenzar su secuencia de CH en ranuras de tiempo diferentes [17]. 2.2. Selección de los algoritmos. Los algoritmos seleccionados para las simulaciones se toman a partir del desempeño que poseen en CRN de dos US. Tabla 2.1. Métricas de ETTR y MTTR de algoritmos recientes. Elaboración propia. Soporta. Máxima. Asimétrico. diversidad. Infinito. Si. Si. 5𝑃 +3 3. 3P. Si. Si. EJS [22]. 3𝑃 +3 2. 4P. Si. Si. SSB [24]. 2(𝑁 − 1)2 2𝑁 − 1. 2𝑁 − 2. Si. No. GOS [20]. 𝑁 4 + 2𝑁 2 + 6𝑁 − 3 3𝑁 2 + 3𝑁. 𝑁(𝑁 − 1). -. -. MC [16]. 2𝑃2 𝑃−1. desconocido. Si. No. RPS [25]. (1). (2). Si. Si. FDCH-CS [1]. (𝑇 − 1)(𝑇 + 1) 4𝑇. 𝑇−1 2. Si. Si. Protocolos. ETTR. MTTR. Aleatorio. 𝑁/𝑝𝐻 *. JS [17].
(31) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. (1). 𝐸𝑇𝑇𝑅 = ⌈. 𝑃. 2. 𝑃. ⌉+. max(𝑘1 ,𝑘2 )−1. 21. (⌈max(𝑘 ,𝑘 )−1⌉−1) 1 2 𝑃. 2⌈min(𝑘 ,𝑘 )−1⌉ 1 2. (2). 𝑀𝑇𝑇𝑅 = ⌈2 ⌈. 𝑃. ⌉ − 1⌉. max(𝑘1 ,𝑘2 ). * 𝑝𝐻 es la probabilidad de un handshake exitoso. Ver sección 2.3. Se utilizan algoritmos que soporten el modelo Asimétrico debido a la importancia práctica de los mismos, dado que es el modelo más común. La Tabla 2.1 muestra los valores de ETTR y MTTR para el modelo Ideal, de los algoritmos que mejor rendimiento han presentado en los últimos tiempos [1], los campos que no están llenos en la Tabla 2.1 es debido a que los autores no ofrecen dicha información. En la tabla 𝑁 es el número de canales total de la CRN, 𝑇 es 𝑁 si 𝑁 es impar o 𝑇 = 𝑁 + 1, si 𝑁 es par (ver sección 2.6), 𝑘1 𝑦 𝑘2 son el número de radios de cada uno de los US (ver sección 2.5) y P es el menor número primo que es mayor que 𝑁. Los algoritmos escogidos para la simulación fueron el SSB, FDCH-CS, RPS y el Aleatorio debido a que son aplicables en los modelos Simétricos y Asimétricos sin necesidad de sincronización de los US, a la vez que poseen mejores valores de ETTR y MTTR para el escenario con el modelo Ideal, que la mayoría de los algoritmos existentes. Además resultan novedosos sobre todo el FDCH-CS y el SSB. Los algoritmos FDCH-CS, SSB y el Aleatorio son comparados con el algoritmo RPS que está diseñado para que se implemente con múltiples radios, en cuanto a sus valores de ETTR y MTTR. El algoritmo Aleatorio permite observar la mejora en términos de ETTR que resulta de utilizar múltiples radios debido a que este algoritmo no sigue una estrategia predeterminada, como en el caso de los otros algoritmos que utilizan ciertas ideas para garantizar el Rendezvous. 2.3. Descripción del algoritmo Aleatorio. En el algoritmo Aleatorio cada US decide su propia secuencia de CH basado en la disponibilidad de canales de forma aleatoria. Durante cada ranura de tiempo el US selecciona cualquiera de los 𝑁 canales con probabilidad 1/𝑁. El seudocódigo de la Figura 2.1 muestra la implementación del algoritmo aleatorio. Donde 𝐴𝑢,𝑗 representa la j-ésima posición de 𝐴𝑢 .Sea 𝑝𝑅 la probabilidad de Rendezvous, 𝑝𝐻 la probabilidad de un handshake exitoso y E denota el evento de que en una misma ranura de tiempo ambos US seleccionen el mismo canal y asumiendo que los dos eventos son independientes entonces:.
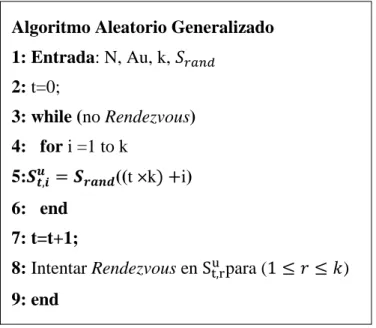
(32) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 22. 𝑝𝑅 = 𝑝𝐻 × p(E) Para el modelo Ideal donde la disponibilidad de ambos US sea la misma e incluya todos los canales posibles se tiene 𝑝(𝐸) =. 1 𝑁. [22].. Algoritmo Aleatorio 1: Entrada: N, 𝐴𝑢 2: while (no Rendezvous) 3: j=rand [0,|𝐴𝑢 |] 4: 𝑆𝑡𝑢 =𝐴𝑢,𝑗 5: Intentar Rendezvous en 𝑆𝑡𝑢 6: end while 7: Salida 𝑆𝑡𝑢 7: Figura 2.1. Seudocódigo del algoritmo Aleatorio implementado con un radio. Adaptado de Algoritmo 1 en [20]. El TTR constituye una variable aleatoria geométricamente distribuida representando el número de fallas antes del primer éxito en una secuencia de pruebas independientes de Bernoulli con probabilidad de éxito iguales a𝑝𝐻 ⁄𝑁.La función de densidad de probabilidad del TTR puede ser expresada como: 𝑝(𝑇𝑇𝑅 = 𝑘) =. 𝑝𝐻 𝑁. (1 −. 𝑝𝐻 𝑘−1 ) , 𝑁. luego 𝐸𝑇𝑇𝑅 = 𝑁/𝑝𝐻 .. 2.3.1 Generalización del algoritmo Aleatorio para utilizar múltiples radios Para generalizar el algoritmo aleatorio para que pueda ser implementado utilizando múltiples radios se utiliza la estrategia de secuencia paralela propuesta en [25]. El seudocódigo de la Figura 2.2 describe el algoritmo generalizado para su implementación con varios radios, donde 𝑆𝑟𝑎𝑛𝑑 es la secuencia formada por la salidas del algoritmo de la Figura 2.1 para z intervalos de tiempo donde 𝑧 ≫ 𝑘. Como se demuestra en [25] para la estrategia de secuencia paralela el MTTR es como máximo 𝑀𝑇𝑇𝑅1 /max(𝑘1, 𝑘2), donde 𝑘1 𝑦 𝑘2 denotan el número de radios de los US y 𝑀𝑇𝑇𝑅1 el MTTR del algoritmo Aleatorio implementado con un único radio..
(33) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 23. Algoritmo Aleatorio Generalizado 1: Entrada: N, Au, k, 𝑆𝑟𝑎𝑛𝑑 2: t=0; 3: while (no Rendezvous) 4: for i =1 to k 5:𝑺𝒖𝒕,𝒊 = 𝑺𝒓𝒂𝒏𝒅 ((t ×k) +i) 6: end 7: t=t+1; u 8: Intentar Rendezvous en St,r para (1 ≤ 𝑟 ≤ 𝑘). 9: end Figura 2.2. Seudocódigo del algoritmo Aleatorio para su implementación con múltiples radios. Elaboración propia. 2.4. Descripción del algoritmo SSB. Los autores de [24] introdujeron el algoritmo SSB (Short Sequences Based) el cual garantiza el Rendezvous y opera en modelos Simétricos y Asimétricos. Algoritmo SSB 1: Entrada: t, p, 𝐴𝑈 , N 2:if p(2N − 1) ≤ t < 𝑝(2N − 1) + N 3: 𝑆𝑡𝑢 = (t + p) mod N 4: else 5: 𝑆𝑡𝑢 = N − 2 − (t + p) mod N 6: end 7: if 𝑆𝑡𝑢 ∉ 𝐴𝑈 8: 𝑆𝑡𝑢 = m(p mod |AU |) 9: end 10: Salida 𝑆𝑡𝑢 Figura 2.3. Seudocódigo del algoritmo SSB para su implementación con un único radio. Tomado de Figura 2 en [24]. 5: 𝑺𝒖𝒕,𝒊 = 𝑺𝑻𝒖 (𝑡 × 𝑟𝑈 + 𝑖) 6: end 𝑟. 7: for h=⌈ 𝑈⌉+1to𝑟𝑈 2.
(34) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 24. La idea fundamental de este algoritmo es ubicar los N canales de la red en un segmento discreto. Cada US comienza en un extremo del segmento y avanza progresivamente hasta el otro extremo, una vez alcanzado el otro extremo, regresa por el camino opuesto. Para evitar que puedan transponerse sin Rendezvous al arribar al extremo inicial del segmento cada US espera una ranura de tiempo, logrando así que en la próxima ronda coincidan [24]. La implementación de este algoritmo con un radio se representa con el seudocódigo mostrado en la Figura 2.3, donde p es el número de períodos que ha realizado el US u y el operador |.| representa la cantidad de elementos del vector. En [24] se demuestra que implementación es: 𝐸𝑇𝑇𝑅 =. el ETTR de este algoritmo con un único radio en su 2(𝑁−1)2 2𝑁−1. , 𝑀𝑇𝑇𝑅 = 2𝑁 − 2 y el MTTR máximo condicional. (MCTTR, maximum conditional TTR) que denota el MTTR en el modelo Asimétrico es (2𝑁 − 1)(𝑁 − 1) [24]. 2.4.1. Generalización del algoritmo SSB para utilizar múltiples radios. La generalización de este algoritmo se realiza como en los casos anteriores utilizando la estrategia de secuencia paralela propuesta en [25]. Algoritmo G-SSB 1: Entrada: N, Au, k 2: t=0; 3: while (no Rendezvous) 4: for i =1 to k 𝑢 5:𝑆𝑡,𝑖 = 𝑆𝑆𝑆𝐵 ((t ×k) +i). 6: end 7: t=t+1; 𝑢 8: Intentar Rendezvous en 𝑆𝑡,𝑟 para (1 ≤ 𝑟 ≤ 𝑘). 9: end. Figura 2.4.Seudocódigo del algoritmo G-SSB para su implementación con múltiples radio. Elaboración propia..
(35) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 25. El algoritmo generalizado se nombra G-SSB, el seudocódigo de la implementación con múltiples radios propuesto, se muestra en la Figura 2.4, donde 𝑆𝑆𝑆𝐵 es la secuencia generada por el algoritmo de la Figura 2.3 al evaluarla en z ranuras de tiempo con 𝑧 ≫ 𝑘 . 2.5. Descripción del algoritmo RPS. Los algoritmos hasta aquí descritos estaban diseñados para utilizar un único radio, a partir de este epígrafe se describe el RPS el cual está diseñado para utilizar cualquier cantidad de radios que estén disponibles, en el siguiente epígrafe se generaliza el algoritmo FDCH-CS que estaba diseñado para utilizar dos radios, nombrando al nuevo algoritmo generalizado como G-FDCH-CS. Los autores de [25] introducen el algoritmo RPS (Role-based Parallel Sequence) el cual está generalizado para que se implemente con múltiples radios. La Figura 2.5 muestra el seudocódigo del algoritmo RPS propuesto en [25]. La idea básica de dicho algoritmo es dividir los radios que posee el US en dos grupos (roles) un grupo formado por un único radio, nombrado radio dedicado y otro grupo formado por el resto de los radios, nombrados radios generales. Los US saltan con los radios generales mientras permanece fijo en un canal con su radio dedicado. El Rendezvous se espera que ocurra entre los radios generales de un US con el dedicado del otro US. Si el US tiene 𝑘 radios, divide sus radios en dos grupos con 𝑘 − 1 radios generales y un radio dedicado, un índice inicial 𝑖 aleatoriamente se selecciona de modo que 𝑖 ∈ [1, 𝑃 − 1], luego se selecciona aleatoriamente una longitud de paso 𝑟, de modo que 𝑟 ∈ [1, 𝑃 − 1], donde 𝑃 es el menor número primo mayor que 𝑁. Los 𝑘 − 1 radios generales saltan en los 𝑃 canales con una longitud del salto de 𝑟. El radio dedicado permanece en un mismo canal durante ⌈. 𝑃. ⌉ ranuras de tiempo y luego. 𝑘−1. salta al próximo canal y permanece este mismo tiempo, si algún canal no está disponible se sustituye por otro aleatoriamente escogido entre los canales previamente marcados como disponibles [25]..
(36) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 26. Algoritmo RPS 1: Entrada: N, Au, k 𝑢 𝑢 𝑢 2: t=1; 𝑆𝑡𝑢 = {𝑆𝑡,1 , 𝑆𝑡,2 , … , 𝑆𝑡,𝑘 }. 3: P= menor primo que no es menor que N 4:l = rand(1, P); h = rand(1, N); 5:while (no Rendezvous) 6:for i = 1 to k-1 𝑢 7: 𝑆𝑡,𝑖 = (𝑙 + ((𝑡 − 1) × (𝑘 − 1) × ℎ − 1) 𝑚𝑜𝑑 (𝑃 + 1) 𝑢 8: if 𝑆𝑡,𝑖 >𝑁 𝑢 𝑢 9:𝑆𝑡,𝑖 = (𝑆𝑡,𝑖 ) 𝑚𝑜𝑑𝑁 𝑢 10: if 𝑆𝑡,𝑖 ∉ 𝐴𝑢 𝑢 11: 𝑆𝑡,𝑖 = 𝐴𝑢 (𝑟𝑎𝑛𝑑[1, |𝐴𝑢 |]). 12: end 𝑢 13: 𝑆𝑡,𝑘 = (⌈. 𝑡. ⌉ − 1)mod N + 1. 𝑃 ⌈ ⌉ 𝑘−1. 𝑢 14: if 𝑆𝑡,𝑘 ∉ 𝐴𝑢 𝑢 15: 𝑆𝑡,𝑘 = 𝐴𝑢 (𝑟𝑎𝑛𝑑[1, |𝐴𝑢 |]). 16: end 17: t=t+1; 𝑢 18: Intentar Rendezvous en 𝑆𝑡,𝑟 para (1 ≤ 𝑟 ≤ 𝑘). 19: end Figura 2.5. Seudocódigo del algoritmo RPS. Adaptado de [25]. Este algoritmo garantiza el Rendezvous y con máxima diversidad. Para este algoritmo como se demuestra en [25]: 𝐸𝑇𝑇𝑅 = ⌈. 𝑃. 𝑃 max(𝑘1 ,𝑘2 )−1. ⌉+. (⌈max(𝑘 ,𝑘 )−1⌉−1) 1 2. 𝑃. del MTTR se calcula como 𝑀𝑇𝑇𝑅 = ⌈2 ⌈. max(𝑘1 ,𝑘2 ). 𝑃. 2⌈min(𝑘 ,𝑘 )−1⌉ 1 2. 2. , por otra parte el valor. ⌉ − 1⌉, donde 𝑘1 𝑦 𝑘2 son el número de. radios que posee cada uno de los US respectivamente..
(37) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 2.6. 27. Descripción del algoritmo FDCH-CS. Algunos autores consideran [22, 24] en el diseño de las secuencias de CH en cuál de los canales puede ocurrir el Rendezvous (diversidad de Rendezvous) [1], este parámetro es una métrica para los algoritmos de Rendezvous y es más relevante en CRN con modelos Asimétricos. Los autores de [1] proponen dos variantes del algoritmo FDCH (Full Diversity Channel Hopping) con el cual el Rendezvous puede ocurrir en cualquiera de los canales disponibles del US (diversidad máxima). Las variantes propuestas en [1] tienen la idea fundamental de representar los canales como nodos de un anillo circular y con el requisito que el total nodos del anillo sea impar, en caso de N ser par se toma como N+1 la cantidad de nodos y se completa con uno de los canales disponibles. En la variante FDCH-RB (Full Diversity Channel Hopping-Role Based) los US toman un rol en la comunicación cada uno, transmisor y receptor respectivamente, como muestra la Figura 2.6 el transmisor salta alrededor del anillo en sentido horario y el receptor, en sentido anti horario, luego de haber completado una ronda permanece en el último canal que visitó durante una ranura de tiempo para evitar que se puedan transponer los US sin que ocurra el Rendezvous.. 0. T-1. 1. A. 2. T-2. 3. B. T-3 ….. Figura 2.6. Representación de los canales como nodos de un anillo y dirección de los US en dependencia del rol que realicen. Tomado de Figura 1 en [1]. La Figura 2.7 muestra el seudocódigo de las secuencias de recepción y transmisión que deben seguir los US de acuerdo al rol que realicen [1]..
(38) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. Secuencia de Transmisión. Secuencia de Recepción. 1: Entrada:t, k, T, 𝐴𝑈 , 𝑆𝑇 (0). 1: Entrada: t, k, T, 𝐴𝑈 , 𝑆𝑅 (0). 2:𝑆𝑇𝑡𝑢 = ( 𝑆𝑇 (0) − 𝑡) 𝑚𝑜𝑑 𝑇. 2:𝑆𝑅𝑡𝑢 = ( 𝑡 + 𝑆𝑅 (0) − 𝑘) 𝑚𝑜𝑑 𝑇. 3: if 𝑆𝑇𝑡𝑢 = 𝑁. 3: if 𝑆𝑅𝑡𝑢 = 𝑁. 4: 𝑆𝑇𝑡𝑢 = 𝑘 𝑚𝑜𝑑 𝑁. 4: 𝑆𝑅𝑡𝑢 = 𝑘 𝑚𝑜𝑑 𝑁. 5: end. 5: end. 6: if. 𝑆𝑇𝑡𝑢. 28. 6: if 𝑆𝑅𝑡𝑢 ∉ 𝐴𝑈. ∉ 𝐴𝑈. 7: call Operación de remplazo. 7: call Operación de remplazo. 8: end. 8: end. 9: Salida 𝑆𝑇𝑡𝑢. 9: Salida 𝑆𝑅𝑡𝑢 a). b). Figura 2.7. Seudocódigo de las secuencias basada en el rol. a) Secuencia de Transmisión. b) Secuencia de Recepción .Adaptada de Figura 2 en [1]. La operación de remplazo ocurre cuando el canal al que corresponde saltar no está disponible para el US, luego en dependencia del modelo de la CRN, Simétrico o Asimétrico, se aplica una de las operaciones de remplazo que muestran el seudocódigo de la Figura 2.8.El algoritmo FDCH-RB [1] necesita que los roles sean pre asignados, lo cual no siempre es posible en las CRN, por lo que los propios autores proponen el algoritmo FDCH-CS. Operación de remplazo. Operación de remplazo. 1: Entrada: k, T, 𝐴𝑈. 1: Entrada: 𝐴𝑈. 𝑘. 2:𝑖 = ⌊ ⌋ 𝑚𝑜𝑑|𝐴𝑈 | 𝑇. 3: 𝑆𝑈 (𝑡) = 𝐴𝑈 (𝑖) 4: Salida 𝑆𝑈 (𝑡). 2:𝑖 = 𝑟𝑎𝑛𝑑(1, |𝐴𝑈 |) 3: 𝑆𝑈 (𝑡) = 𝐴𝑈 (𝑖) 4: Salida 𝑆𝑈 (𝑡). a). b). Figura 2.8. Seudocódigo de la Operación de remplazo. a) Modelo Simétrico. b) Modelo Asimétrico. Adaptada de Figura 4 en [1]..
(39) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 29. 0. T-1. 1. SRB. STA. A. 2. B. T-2. STB. SRA. 3. T-3 ….. Figura 2.9. Dirección de los radios de los US A y B basado en el rol de cada uno. Adaptado de Figura 5 en [1]. Como muestra la Figura 2.9 en este algoritmo cada usuario está equipado con dos radios los cuales son designados como de transmisión y recepción respectivamente. Los radios de cada US siguen en cada ranura de tiempo la secuencia 𝑆𝑅𝑡𝑢 mostrada en la Figura 2.7 b) si cumplen el rol de receptor y la secuencia 𝑆𝑇𝑡𝑢 mostrada en la Figura 2.7 a) si están destinado a la transmisión, de esta manera no es necesario preestablecer el rol de cada usuario, ya que cada uno puede desempeñar ambos roles simultáneamente [1]. La Figura2.10 muestra el seudocódigo del algoritmo FDCH-CS, donde en cada ranura de tiempo cada US intenta el Rendezvous con ambos radios a la vez en los canales 𝑆𝑇𝑢 (𝑡) y 𝑆𝑅𝑢 (𝑡) respectivamente. Estrategia Común (CS) 1: Entrada:t, k, T, 𝐴𝑈 , 𝑆𝑈 (0) 2: 𝑆𝑇𝑢 (𝑡) = 𝑆𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎𝑑𝑒𝑇𝑟𝑎𝑛𝑠𝑚𝑖𝑠𝑖ó𝑛(t, k, T, 𝐴𝑈 , 𝑆𝑈 (0)) 3: 𝑆𝑅𝑢 (𝑡) = 𝑆𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎𝑑𝑒𝑅𝑒𝑐𝑒𝑝𝑐𝑖ó𝑛(t, k, T, 𝐴𝑈 , 𝑆𝑈 (0)) 4: Salida 𝑆𝑇𝑢 (𝑡), 𝑆𝑅𝑢 (𝑡) Figura 2.10. Seudocódigo del Algoritmo FDCH-CS para su implementación de dos radios por cada US. Adaptado de Figura 6 en [1]. Como se demuestra en [1] el 𝑀𝑇𝑇𝑅 = o es igual a 𝑁 + 1 si 𝑁 es impar.. 𝑇−1 2. y 𝐸𝑇𝑇𝑅 =. (𝑇−1)(𝑇+1) 4𝑇. , donde 𝑇 = 𝑁 si 𝑁 es par.
(40) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 30. 2.6.1 Generalización del algoritmo FDCH-CS para utilizar múltiples radios El algoritmo FDCH-CS [1] está diseñado para ser implementado con dos radios, para su implementación con múltiples (más de dos) radios se utiliza la estrategia de secuencia paralela propuesta en [25]. Se utiliza además de la estrategia de secuencia paralela una distribución de los radios de acuerdo al rol del US, la división no se realiza como en el método RPS. Con el objetivo de generalizar el algoritmo FDCH-CS para su empleo con más de dos radios, cada uno de los 𝑘 radios de cada US se clasifica en transmisor o receptor, de manera 𝑘. 𝑘. 2. 2. talque la mitad de los radios (⌈ ⌉) son marcados como transmisores y el resto (𝑘 − ⌈ ⌉) como receptores. La Figura 2.11 muestra el algoritmo G-FDCH-CS, el cual constituye la generalización del FDCH-CS para su implementación con múltiples radios, donde 𝑆𝑇𝑢 y 𝑆𝑅𝑢 son las secuencias generadas por el algoritmo FDCH-CS descrito en los seudocódigos de la Figura 2.7 a) y b) respectivamente, evaluadas en z ranuras de tiempo con 𝑧 ≫ 𝑘 . Algoritmos G- FDCH-CS 1: Entrada: 𝑘, 𝑆𝑇𝑢 , 𝑆𝑅𝑢 2: t=0; 3: while (no Rendezvous) 𝑘. 4: for i=1 to⌈ ⌉ 2. 𝑢 5:𝑆𝑡,𝑖. = 𝑆𝑇𝑢 (𝑡 × 𝑘 + 𝑖). 6: end 𝒌. 7: for h=⌈ ⌉+1 to k 2. 8:. 𝑢 𝑆𝑡,ℎ. = 𝑆𝑅𝑢 (𝑡 × 𝑘 + ℎ). 9: end 10: t=t+1; 11: Intentar Rendezvous en 𝑆𝑡𝑢 para (1 ≤ 𝑡 ≤ 𝑘) 12: end Figura 2.11. Seudocódigo del algoritmo G-FDCH-CS para su implementación con una cantidad mayor de dos radios. Elaboración propia..
(41) CAPÍTULO 2. GENERALIZACIÓN DE ALGORITMOS DE RENDEZVOUS CIEGOS. 31. 2.7 Consideraciones finales del capítulo La mayoría de los algoritmos de Rendezvous ciegos existentes implícitamente asumen que los US están equipados con un único dispositivo de radio, para adaptar dichos algoritmos para su implementación con múltiples radios se utiliza el método de secuencia paralela, debido a sus ventajas sobre el método de secuencia independiente. Para la generalización del algoritmo FDCH-CS se utiliza una distribución de los radios de cada US según el rol, dicha distribución se efectúa de una manera diferente a la utilizada por los autores del algoritmo RPS. En este capítulo se generalizan los algoritmos FDCH-CS y el SSB, los algoritmos generalizados se nombran como G-FDCH-CS y G-SSB respectivamente..
(42) CAPÍTULO 3. EVALUACIÓN Y COMPARACIÓN DE LOS ALGORITMOS. 32. CAPÍTULO 3. EVALUACIÓN Y COMPARACIÓN DE LOS ALGORITMOS. En este capítulo se muestran los resultados de la simulación de los algoritmos seleccionados y se comparan en los escenarios Ideal, Simétrico y Asimétrico. En el epígrafe 3.1 se describe el entorno de simulación de la CRN en cuestión. En los epígrafes siguientes se comparan los algoritmos SSB, FDCH-CS, RPS y el Aleatorio en cuanto a los valores de ETTR y MTTR estimados, estos valores se estiman a partir de la simulación de los algoritmos, a los cuales se le varía en cada caso el número de radios que posee cada US y la cantidad de canales comunes. En el epígrafe final se realizan consideraciones finales del capítulo. 3.1. Entornos de simulación de los algoritmos. Para la simulación a los algoritmos G-SSB, G-FDCH-CS, RPS y el Aleatorio se le programan los simuladores con ayuda del software MATLAB. Dichos simuladores permiten variar la cantidad de canales disponibles (G) para evaluar los algoritmos en los diferentes modelos (Ideal, Simétrico y Asimétrico). En todos los casos se realizan 105 corridas de cada escenario y se estima el ETTR y el MTTR, como la media aritmética y el valor máximo de los resultados, respectivamente. En el caso del algoritmo Aleatorio cuando el TTR supera el valor de 103 ranuras de tiempo se considera infinito y no se tiene en cuenta en los resultados de estimación del ETTR, a su vez no se le estima el MTTR en ningún escenario al algoritmo Aleatorio, ya que es teóricamente infinito. Para garantizar que la cantidad de simulaciones utilizadas fueran suficientes se calcula el error en cada una de ellas logrando que el mismo fuera menor que el cinco por ciento del valor del ETTR..
(43) CAPÍTULO 3. EVALUACIÓN Y COMPARACIÓN DE LOS ALGORITMOS. 33. La CRN simulada posee 2 US (M=2), con 45 canales posibles (N=45), en los escenarios Ideales (G=45), se varía el número de radio de uno en uno desde 2 hasta 10 radios. Para los escenarios con modelo Simétrico se varía el valor de 𝐺 tomando los valores 35 y 15. En el caso de los escenarios con modelo Asimétrico se varía 𝐺 tomando los valores 35, 15 y 1. Al variar la cantidad de canales disponibles se simula la actividad de UP cercanos a cada US. Como muestra la Figura 3.1 los canales disponibles de cada US dependen de la posición geográfica de los US respecto a los UP. Los US de las Zonas Geográficas 1 y 2 respectivamente poseen diferentes disponibilidades, por lo que conforman un escenario con un modelo Asimétrico, en el caso de los US que pertenecen a una misma Zona Geográfica poseen la misma disponibilidad conformando un escenario con un modelo Simétrico. En caso que no exista ningún UP en la Zona Geográfica es el escenario con modelo Ideal (Zona Geográfica 3). Zona Geográfica 1. Zona Geográfica 2. Comunicación en Escenario Asimétrico. Comunicación en Escenario Simétrico. Usuario Primario. Zona Geográfica 3. Comunicación en Escenario Ideal. Usuario Cognitivo. Figura 3.1. Diagrama de la CRN de los US con diferente disponibilidad de canales en dependencia de la posición respecto a los UP. Elaboración propia. El valor de la cantidad de canales disponibles de cada usuario (G) se asigna en dependencia del modelo que tenga el escenario a simular. En el caso de escenarios con el modelo Asimétrico se seleccionan G canales escogidos aleatoriamente entre los N canales posibles,.
Figure
![Figura 1.1. Diagrama en bloques de Radio Definida por Software. Adaptada de Figura 1.1 en [8]](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/16.918.148.813.335.555/figura-diagrama-bloques-radio-definida-software-adaptada-figura.webp)
![Figura 1.2. Representación de agujeros espectrales en tiempo y en frecuencia. Adaptada de Figura 3 de [5]](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/18.918.185.697.243.543/figura-representación-agujeros-espectrales-tiempo-frecuencia-adaptada-figura.webp)
![Figura 1.3. Diagrama de una red radio cognitiva heterogénea. Adaptada de Figura 6 de [5]](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/19.918.149.797.379.798/figura-diagrama-red-radio-cognitiva-heterogénea-adaptada-figura.webp)
![Figura 1.4. Clasificación de los algoritmos de Rendezvous. Adaptado de Figura 1 de [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/21.918.169.795.278.562/figura-clasificación-de-los-algoritmos-rendezvous-adaptado-figura.webp)
+7

![Figura 1.6. Clasificación de los Algoritmos de Rendezvous ciegos. Adaptada de Figura 1 de [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/23.918.163.778.701.965/figura-clasificación-algoritmos-rendezvous-ciegos-adaptada-figura.webp)
![Figura 1.7. Seudocódigo del método de secuencia independiente. Adaptado de [25].](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/26.918.149.616.570.984/figura-seudocódigo-método-secuencia-independiente-adaptado.webp)
![Figura 2.5. Seudocódigo del algoritmo RPS. Adaptado de [25].](https://thumb-us.123doks.com/thumbv2/123dok_es/7346890.458055/36.918.145.583.105.778/figura-seudocódigo-del-algoritmo-rps-adaptado-de.webp)

Outline
Documento similar