Dise˜
no e Implementaci´
on de un Sistema de P´
endulo Invertido
para la Ense˜
nanza de Conceptos de Control en Ingenier´ıa,
a Trav´
es del M´
etodo de Variables de Estado
´
Angela Paola Duquino S´
anchez
Universidad Distrital Francisco Jos´
e de Caldas
Facultad de Ingenier´ıa
Proyecto Curricular de Ingenier´ıa Electr´onica Bogot´a D.C.
Dise˜
no e Implementaci´
on de un Sistema de P´
endulo Invertido
para la Ense˜
nanza de Conceptos de Control en Ingenier´ıa,
a Trav´
es del M´
etodo de Variables de Estado
´
Angela Paola Duquino S´anchez
C´od. 20091005017
Trabajo de grado para optar al t´ıtulo de:
Ingeniero Electr´onico en la modalidad de investigaci´on
Directora:
Diana Marcela Ovalle Mart´ınez. PhD.
L´ınea de Investigaci´on: Se˜nales y Control Grupo de Investigaci´on:
IDEAS
Universidad Distrital Francisco Jos´e de Caldas
Facultad de Ingenier´ıa
Proyecto Curricular de Ingenier´ıa Electr´onica Bogot´a D.C.
Nota de Aceptaci´
on
Firma del Jurado
La preocupaci´on por el hombre y su destino siempre debe ser el inter´es primordial de todo esfuerzo t´ecnico. Nunca olvides esto entre tus diagramas y ecuaciones.
Agradecimientos
A Dios, por los logros obtenidos y por cada una de las personas que puso en mi camino a lo largo de mi carrera.
A mi familia, por su amor, formaci´on, apoyo incondicional, opiniones, sugerencias y
cola-boraci´on en cada experiencia y actividad de mi vida.
A mis profesores y compa˜neros, por su ayuda, ense˜nanzas, sugerencias y opiniones en los momentos de duda que me ayudaron a la construcci´on de este trabajo. A la profesora Diana Marcela Ovalle y al Grupo de Investigaci´on ((IDEAS)), por su apoyo y por darme la oportunidad de hacer parte de esta gran labor y de este proyecto de investigaci´on. A la Universidad Distrital por la educaci´on brindada, por formarme como una profesional con valores y consciente de su responsabilidad en el progreso y desarrollo de una mejor sociedad.
RESUMEN xi
Resumen
En este documento se desarrolla un prototipo funcional tipo p´endulo invertido de trayecto-ria circular, el cual es aportado al Proyecto de Investigaci´on “Dise˜no e Implementaci´on de Plantas B´asicas para la Ense˜nanza de Conceptos de Control en Ingenier´ıa” del Grupo de Investigaci´on IDEAS de la Universidad Distrital Francisco Jos´e de Caldas como herramienta para la ense˜nanza en el ´area de sistemas de control. Se presentan las ecuaciones que represen-tan la din´amica del sistema, las cuales fueron utilizadas como punto de partida, tanto para el dise˜no de la implementaci´on electr´onica y mec´anica del prototipo como para el dise˜no de controladores que lo llevan a la estabilidad.
Se muestra el dise˜no para la implementaci´on tanto electr´onica como mec´anica del prototipo, la selecci´on de los componentes y materiales a usar para la misma, as´ı como las caracter´ısti-cas b´asicas de cada uno de ellos. Tambi´en, se presenta la caracterizaci´on de los sensores y actuadores del sistema, as´ı como la caracterizaci´on de la planta, la cual se lleva a cabo por medio de la medici´on y optimizaci´on de los par´ametros f´ısicos calculados que modelan el comportamiento del sistema, comparando las variables del modelo de simulaci´on y los datos obtenidos de la implementaci´on del sistema. De igual forma, se presentan los resultados de las estimaciones realizadas, que corresponden al modelo din´amico del prototipo implemen-tado.
Se describe el dise˜no de un controlador por la t´ecnica de variables de estado. De igual forma, se describe el dise˜no de controladores difusos tipo 1 y tipo 2. De esta manera, se crean gu´ıas de laboratorio para el trabajo con el prototipo en el ´area, que abarcan t´ecnicas de dise˜no de controladores tanto de tipo lineal como no lineal, a ser implementadas de forma digital.
Adicionalmente, se presentan los planos realizados para la construcci´on mec´anica del proto-tipo, los esquem´aticos y circuitos impresos dise˜nados para el mismo y la programaci´on del microcontrolador. Dado que el proyecto tiene como resultado un prototipo de hardware, es necesario e indispensable el desarrollo de un manual de usuario, mantenimiento y reparaci´on del mismo.
Contenido
Resumen XI
Lista de Figuras XVII
Lista de Tablas XXI
Lista de S´ımbolos XXIII
Introducci´on 1
1. Generalidades 3
1.1. Planteamiento del problema . . . 3
1.2. Objetivos . . . 5
1.2.1. Objetivo general . . . 5
1.2.2. Objetivos espec´ıficos . . . 5
1.3. Aportes y Reconocimientos . . . 6
2. Dise˜no del Prototipo 7 2.1. Selecci´on de la estructura de p´endulo invertido a dise˜nar . . . 7
2.2. Recomendaciones para la construcci´on de equipos de laboratorio . . . 9
2.2.1. Dise˜no Electr´onico . . . 9
2.2.2. Dise˜no Mec´anico . . . 11
2.3. An´alisis de requerimientos del sistema . . . 14
2.4. Selecci´on de componentes para la parte electr´onica del sistema . . . 15
2.4.1. Sensores . . . 15
2.4.2. Motor . . . 16
2.4.3. Microcontrolador . . . 17
2.4.4. M´odulo de comunicaci´on . . . 19
2.4.5. Otros componentes electr´onicos . . . 20
2.5. Dise˜no electr´onico . . . 23
2.5.1. Captura y entrega datos . . . 23
xiv CONTENIDO
2.5.3. Comunicaci´on microcontrolador-PC . . . 25
2.5.4. Microcontrolador . . . 25
2.5.5. Etapa de protecci´on para las salidas . . . 26
2.6. Selecci´on de componentes para la parte mec´anica del sistema . . . 26
2.6.1. Selecci´on componentes y piezas . . . 26
2.6.2. Selecci´on materiales . . . 29
2.7. Dise˜no mec´anico (aproximado) . . . 32
2.7.1. Carro . . . 33
2.7.2. Base del carro . . . 39
2.8. Consideraciones . . . 42
3. Implementaci´on del Prototipo 45 3.1. Caracterizaci´on de sensores y motor . . . 45
3.1.1. Potenci´ometro lineal . . . 45
3.1.2. Motor . . . 46
3.1.3. Encoder . . . 46
3.2. Circuitos impresos . . . 48
3.3. Programaci´on Microcontrolador . . . 52
3.4. Costos de implementaci´on . . . 57
3.5. Sistema de p´endulo invertido implementado . . . 59
4. Modelamiento y Caracterizaci´on del Sistema 61 4.1. Modelo din´amico del sistema de p´endulo invertido . . . 61
4.2. Linealizaci´on y ecuaciones de estado del sistema de p´endulo invertido . . . . 65
4.3. Caracterizaci´on del sistema . . . 66
4.3.1. Optimizaci´on de los par´ametros del sistema . . . 68
4.3.2. Sistemas simulado/real . . . 69
4.4. An´alisis de resultados . . . 70
4.4.1. Caracterizaci´on del sistema . . . 70
4.4.2. Consideraciones . . . 71
5. Dise˜no e Implementaci´on de Controladores 73 5.1. Dise˜no e Implementaci´on de controladores difusos . . . 73
5.1.1. Sistema difuso tipo 2 de intervalo . . . 73
5.1.2. Sistema difuso tipo 1 . . . 75
5.1.3. Optimizaci´on de los par´ametros del controlador . . . 76
5.2. Dise˜no e implementaci´on de un controlador por el m´etodo de variables de estado 77 5.3. An´alisis de resultados . . . 79
5.3.1. Sistemas simulado/real . . . 79
5.3.2. Controladores difusos . . . 79
CONTENIDO xv
5.3.4. Funci´on ((CSPI)) . . . 81
5.3.5. Consideraciones . . . 84
5.3.6. Conclusi´on . . . 84
6. Conclusiones y Trabajos Futuros 87 6.1. Conclusiones . . . 87
6.2. Trabajos Futuros . . . 88
A. AAnexos 91 A.1. Hoja de datos y manual de usuario . . . 91
A.2. Pr´acticas de laboratorio . . . 91
A.3. Caracterizaci´on planta . . . 91
A.4. ArchivosMatLabr . . . 94
Lista de Figuras
2-1. Estructuras de p´endulo invertido. . . 8
2-2. Diagrama del proceso de dise˜no mec´anico [13]. . . 13
2-3. Partes principales del sistema. . . 14
2-4. Potenci´ometro. . . 15
2-5. Encoder [14]. . . 15
2-6. Motor. . . 16
2-7. Microcontrolador MSP430G2553 [15]. . . 18
2-8. FT232. . . 20
2-9. Diagrama funcional del DAC [18]. . . 21
2-10.Atenuador para capturar el voltaje del motor. . . 23
2-11.Seguidor de voltaje para el canal del encoder dirigido al microcontrolador. . 24
2-12.Amplificadores para otorgar los voltajes correspondientes a los valores del ´ angulo y velocidad dados por el microcontrolador. . . 24
2-13.Etapa de potencia para el motor. . . 25
2-14.Comunicaci´on microcontrolador-PC por medio de la tarjeta FT232. . . 26
2-15.Diagrama circuital microcontrolador. . . 26
2-16.Protecci´on de las salidas ´angulo y velocidad a cortos con la fuente. . . 27
2-17.Llanta. . . 27
2-18.Anillo Colector (Slip Ring). . . 28
2-19.Funcionamiento de un anillo colector. . . 29
2-20.Carro. . . 34
2-21.P´endulo. . . 34
2-22.Pieza mec´anica para el movimiento del p´endulo. . . 35
2-23.Acople potenci´ometro-p´endulo. . . 35
2-24.Acople motor. . . 36
2-25.Acople motor-llanta. . . 36
2-26.Chumacera llanta libre. . . 36
2-27.Acople encoder. . . 37
2-28.Acople anillo colector-carro. . . 37
2-29.Ensamble Carrocer´ıa. . . 38
xviii LISTA DE FIGURAS
2-31.Paredes del carro. . . 39
2-32.Base del carro. . . 39
2-33.Ensamble de la Base del Carro. . . 41
2-34.Tapas base. . . 41
2-35.Paredes de la base del carro. . . 42
3-1. Caracterizaci´on potenci´ometro y amplificador del valor del ´angulo con su res-pectivas l´ıneas de tendencia. . . 45
3-2. Ajustes para el voltaje en el motor con su respectivas l´ıneas de tendencia. . . 46
3-3. Caracterizaci´on encoder y amplificador del valor de la velocidad con sus res-pectivas l´ıneas de tendencia. . . 47
3-4. Comportamiento del motor respecto a la velocidad. . . 47
3-5. Esquem´atico del prototipo. . . 48
3-6. Circuitos impresos del prototipo. . . 49
3-7. PCB’s del prototipo. . . 51
3-8. Interfaz gr´afica principal “Grace”, donde se activan y seleccionan los m´ odu-los que se desean utilizar en el microcontrolador, as´ı como su frecuencia de trabajo, voltaje de alimentaci´on, entradas, salidas, entre otros. . . 52
3-9. Activaci´on en secuencia de dos canales del ADC, para capturar los voltajes del motor y potenci´ometro. . . 53
3-10.Activaci´on interrupci´on de tiempo cada 10 mseg en el Timer0 A3 Bloque 0. 54 3-11.Activaci´on de la interrupci´on en el pin de entrada P1.5 para el canal del encoder. 54 3-12.Activaci´on modo PWM del Timer1 A3 Bloque 1 para generar el PWM del ´ angulo. . . 54
3-13.Activaci´on modo PWM del Timer1 A3 Bloque 2 para generar el PWM de la velocidad. . . 55
3-14.Activaci´on de laU ART en el USCI A0 para establecer comunicaci´on entre el microcontrolador y FT232. . . 56
3-15.Asignaci´on de las entradas, salidas, canales ADC, PWM y m´odulos de comu-nicaci´on del microcontrolador. . . 56
3-16.Sistema de p´endulo invertido implementado. . . 59
4-1. Diagrama de cuerpo libre del sistema de p´endulo invertido de trayectoria circular. . . 61
4-2. Circuito equivalente para un motor DC. . . 63
4-3. Respuestas del sistema simulado y real a una entrada seno con los par´ametros iniciales. . . 67
4-4. Diagramas de bloque para el sistema. . . 69
LISTA DE FIGURAS xix
5-1. Funciones de pertenencia de entrada y salida del controlador. . . 73
5-2. Diagramas de bloque para el sistema. . . 79
5-3. Respuestas del sistema controlado simulado y real, con un controlador difuso tipo 2 de intervalo. . . 80
5-4. Respuestas del sistema controlado simulado y real, con un controlador difuso tipo 1 optimizado en (5-23). . . 81
5-5. Respuestas del sistema controlado simulado y real, con el controlador por realimentaci´on de estados mostrado en (5-21). . . 81
5-6. Comportamiento posici´on angular del p´endulo en tiempo real. . . 82
5-7. Comportamiento de las variables del sistema de p´endulo invertido en el tiempo. 83
5-8. Ejecuci´on de la funci´on CSPI(Tiempo,’COM’). . . 84 5-9. Respuestas del sistema controlado simulado y real, para cada uno de los
con-troladores desarrollados. . . 85
Lista de Tablas
2-1. Tabla de datos encoder Pittman serie E22A [14]. . . 16
2-2. Tabla de datos del motor. . . 16
2-3. Caracter´ısticas microcontrolador MSP430G2553 [15]. . . 17
2-4. Funciones terminales del DAC TLC5615 [18]. . . 21
2-5. Componentes electr´onicos. . . 22
2-6. Piezas Mec´anicas. . . 30
2-7. Accesorios para el ensamble de las piezas. . . 33
3-1. Costos para la implementaci´on mec´anica del prototipo. . . 57
3-2. Costos para la implementaci´on electr´onica del prototipo. . . 58
3-3. Caracter´ısticas del Sistema. . . 59
4-1. Par´ametros del sistema implementado. . . 71
5-1. Tabla de verdad por l´ogica de Kleene. . . 74
5-2. Valor del criterio ISE para cada controlador. . . 85
Lista de s´ımbolos
S´ımbolos Generales
S´ımbolo T´ermino Unidad SI
Asup Area superficial´ m2
t Tiempo s
g Gravedad m/s2
h Altura m
η Viscosidad Ns/m2
z Distancia hundimiento m
S´ımbolos del motor DC
S´ımbolo T´ermino Unidad SI Definici´on
τ Torque Nm KTIa
τs Torque Stall Kg f-cm 1 Kg f-cm = 0,09806 Nm
KT Constante de torque Nm/A
Ia Corriente de armadura A
Ra Resistencia de armadura Ω
Vm Voltaje aplicado al motor V
Ki Constante de inducido AΩs
ωm Velocidad angular del motor rads
xxiv LISTA DE S´IMBOLOS
S´ımbolos del p´
endulo invertido
S´ımbolo T´ermino Unidad SI Definici´on
θ Angulo de inclinaci´´ on rad ◦
˙
φ Velocidad angular carro rads
N Fuerza normal del carro N (M +m)g
u Fuerza de control N τ /r
2l Longitud p´endulo m
m Masa p´endulo kg
M Masa del carro kg
µ Coeficiente fricci´on viscosa Ns/m Kg/s
b Coeficiente fricci´on rotacional Nms Kgm2/s
ρ Coeficiente fricci´on normal
I Inercia p´endulo Kg m2
R Radio pista m
r Radio llanta m
ω Velocidad angular 1s dθ/dt=v/r
s Arco m Rφ
S´ımbolos de un modelo din´
amico
S´ımbolo T´ermino Unidad SI
Mp Sobre paso m´aximo (Overshoot)
ξ Factor de amortiguamiento
ωn Frecuencia natural no amortiguada
ts Tiempo de establecimiento s
LISTA DE S´IMBOLOS xxv
S´ımbolos de ecuaciones de estado
S´ımbolo T´ermino
x(t)−x[n] Vector de estado u(t)−u[n] Vector de entrada y(t)−y[n] Vector de salida r(t)−r[n] Vector de referencia
A Matriz de estados
B Matriz de entrada
C Matriz de salida
D Matriz de transmisi´on directa
U Matriz de controlabilidad
I Matriz identidad
S Matriz de transformaci´on
K Vector de ganancias
S´ımbolos selecci´
on disipador
S´ımbolo T´ermino Unidad SI Definici´on
PD Potencia disipada W
TA Temperatura ambiente ◦C
TJ Temperatura de juntura ◦C
RJC Resistencia juntura-cotenedor ◦C/W
RCD Resistencia contenedor-disipador ◦C/W
Introducci´
on
La ingenier´ıa de control ha sido uno de los m´as grandes avances en la tecnolog´ıa mundial y es base de estudios hoy d´ıa. Gracias a esta, se han logrado desarrollos significativos para mejorar la calidad de vida de las personas. Por tal motivo, es pertinente y necesario en-se˜nar los conceptos b´asicos que se requieren para el an´alisis e implementaci´on de sistemas de control, por medio de la sustentaci´on te´orica y la aplicaci´on de dicho aprendizaje, a trav´es de pr´acticas de laboratorio que orienten a los estudiantes en el desarrollo de los conceptos adquiridos en la teor´ıa. Para lograr tal fin, el Grupo de Investigaci´on, Desarrollo y Aplica-ciones en Se˜nales (IDEAS) de la Universidad Distrital Francisco Jos´e de Caldas, a trav´es del Proyecto de Investigaci´on “Dise˜no e Implementaci´on de Plantas B´asicas para la Ense˜nanza de Conceptos de Control en Ingenier´ıa”, evaluado, aprobado y financiado por el Centro de Investigaciones y Desarrollo Cient´ıfico de la Universidad, propone el desarrollo de diferentes plantas b´asicas para la ense˜nanza de conceptos de control en ingenier´ıa.
2 INTRODUCCI ´ON
La implementaci´on del sistema se llev´o a cabo con la participaci´on de la docente profesional en el ´area de control. En cuanto a la metodolog´ıa de trabajo, en primer lugar se realiz´o una b´usqueda de las diferentes estructuras de sistemas de p´endulo invertido implementadas ac-tualmente, con el fin de determinar cu´al de ellas era la m´as apropiada para ser implementada.
Cap´ıtulo 1
Generalidades
1.1.
Planteamiento del problema
Dada la importancia que tienen los conceptos de control en el desarrollo de tecnolog´ıas y competencias en los estudiantes de algunos n´ucleos de ingenier´ıa (como la ingenier´ıa el´ ectri-ca, electr´onica y de sistemas), se hace necesario proveer a los estudiantes de las herramientas necesarias que les permitan comprender de forma clara y concisa los conceptos b´asicos de control en ingenier´ıa, teniendo en cuenta la complejidad de esta ´area debido al fuerte conte-nido matem´atico que involucra. Es por ello que actualmente se cuenta con diferentes recursos de ayuda para la ense˜nanza de estos conceptos como simuladores, software acad´emico, equi-pos de laboratorio especializado y, en algunos casos, el dise˜no e implementaci´on de sistemas de control reales en el laboratorio para la resoluci´on de problemas particulares.
Los simuladores ofrecen resultados ideales comparados con la implementaci´on real de un sis-tema y, pese a que pueden dar un nivel de realismo bastante elevado, es muy dif´ıcil suponer cu´ales son las no linealidades que puede presentar un sistema, a menos que sea implemen-tado inicialmente. Por supuesto, en diferentes universidades, e incluso los desarrolladores de ciertos programas de software licenciados, como Matlab, se han tomado el trabajo de
desarrollar modelos de simulaci´on bastante detallados de una amplia variedad de sistemas din´amicos, con el fin de que las personas interesadas en aplicarle teor´ıa de control a dichos sistemas puedan utilizar los modelos y enfocarse plenamente en las diferentes estrategias de control que se deseen probar. Sin embargo, al utilizar programas de simulaci´on los estudian-tes quedan con la idea de que no est´an experimentando con sistemas reales.
4 1 Generalidades
bajo costo. Adem´as en el caso particular de la Universidad, esta cuenta con m´ultiples fuentes de alimentaci´on recientemente adquiridas, as´ı como con licencias de programas orientados al control de sistemas, que hacen un poco sobredimensionada la inversi´on que se debe hacer para adquirir equipos de laboratorio de control comerciales.
Cuando los estudiantes se ven en la necesidad de dise˜nar e implementar sus propios siste-mas, se ven enfrentados a una serie de problemas y dudas debido al inesperado o inadecuado funcionamiento de los mismos por diferentes motivos; problemas que el aspirante a inge-niero debe comprender y corregir para lograr objetivos propuestos. Sin embargo, el tiempo destinado para las pr´acticas de laboratorio usualmente no es el suficiente para lograr que el sistema funcione de manera adecuada (electr´onicamente hablando), por lo que el objetivo del laboratorio de control se pierde totalmente y resulta siendo mucho m´as complicado debido a las falencias te´orico-pr´acticas heredadas de otras materias y no por la complejidad inherente a los sistemas de control, lo que genera una desmotivaci´on en los estudiantes por seguir esta l´ınea de profundizaci´on.
Debido a todo lo anterior, se hace necesario contar con herramientas, principalmente plantas (sistemas) de laboratorio, que permitan a los estudiantes el desarrollo de pr´acticas que forta-lezcan y ayuden a comprender de forma clara y concisa los conceptos de control introducidos en la teor´ıa. Con el fin de suplir esta necesidad en la Universidad, a trav´es del Grupo de Investigaci´on, Desarrollo y Aplicaciones en Se˜nales (IDEAS) de la Universidad Distrital, se est´a desarrollando el Proyecto de investigaci´on “Dise˜no e Implementaci´on de Plantas B´asicas para la Ense˜nanza de Conceptos de Control en Ingenier´ıa”, evaluado, aprobado y financiado por el Centro de Investigaciones y Desarrollo Cient´ıfico de la Universidad. El proyecto de investigaci´on en menci´on busca implementar tres plantas b´asicas orientadas al aprendizaje de conceptos b´asicos de control en la Facultad de Ingenier´ıa, de las cuales una de ellas es implementada en el presente proyecto. En este contexto y orientado espec´ıficamente a las tem´aticas de identificaci´on de sistemas y Variables de Estado en los espacios acad´emicos del ´
area de control del Proyecto Curricular de Ingenier´ıa Electr´onica surge el presente proyecto de grado, que pretende dar respuesta a la pregunta:¿C´omo, a partir de la
implementa-ci´on de un sistema tipo p´endulo invertido sobre un carro, se pueden fortalecer
los conceptos fundamentales de los cursos del ´area de control que incluyen
las tem´aticas de identificaci´on de sistemas y la t´ecnica de variables de estado,
en el proyecto curricular de ingenier´ıa electr´onica de la Universidad Distrital?
Para darle respuesta a la pregunta, en este trabajo de grado se propone el dise˜no e imple-mentaci´on de un sistema tipo p´endulo invertido sobre un carro, con una entrada (voltaje sobre el motor del carro) y dos salidas (la posici´on del p´endulo respecto a la vertical y la velocidad del carro), con el fin de utilizarlo en el desarrollo de pr´acticas de laboratorio en el ´
1.2 Objetivos 5
de controladores en Variables de Estado, o t´ecnicas de control avanzadas. Lo anterior supone la elaboraci´on y desarrollo de gu´ıas de laboratorio orientadas a los conceptos que se desean fortalecer.
As´ı mismo, se espera que el prototipo de sistema de p´endulo invertido sea utilizado en el laboratorio y por tanto replicado para que cada grupo pueda trabajar con su prototipo de forma simult´anea, lo cual supone la necesidad de la elaboraci´on de manuales, tanto de usuario como de mantenimiento y reparaci´on.
1.2.
Objetivos
1.2.1.
Objetivo general
Dise˜nar e implementar un sistema de p´endulo invertido sobre un carro para la ense˜nanza de conceptos de control en ingenier´ıa, relacionados con la t´ecnica de Variables de Estado y la identificaci´on de sistemas.
1.2.2.
Objetivos espec´ıficos
3.2.1 Dise˜nar y simular un sistema de p´endulo invertido sobre un carro con una entrada anal´ogica (voltaje sobre el motor del carro) y dos salidas anal´ogicas (la posici´on del p´endulo respecto a la vertical y la velocidad del carro).
3.2.2 Implementar y poner a punto un prototipo del sistema teniendo en cuenta las reco-mendaciones para la construcci´on de equipos de laboratorio.
3.2.3. Realizar el manual de usuario, donde se especifiquen con claridad las capacidades y limitaciones del sistema, as´ı como su adecuada forma de uso.
3.2.4. Realizar un manual de mantenimiento y reparaci´on, donde se especifiquen comple-tamente los dise˜nos electr´onico y mec´anico, y se detallen los procesos de reparaci´on espec´ıficos.
6 1 Generalidades
1.3.
Aportes y Reconocimientos
El desarrollo de un prototipo funcional de p´endulo invertido de trayectoria circular que incluye un m´odulo de comunicaci´on con el PC (para la ejecuci´on de controladores digitales directamente desde el mismo en tiempo real) y el acceso a las variables del sistema anal´ogico (para la ejecuci´on de controladores anal´ogicos), posibilita que dicho prototipo sea utilizado como herramienta para el estudio de sistemas din´amicos y control avanzado (difusos, robustos, ´optimos, adaptivos, entre otros).
El sistema de p´endulo invertido de trayectoria circular, es un prototipo poco com´un, ya que por lo general, estos sistemas est´an definidos en trayectorias lineales, lo que otorga al prototipo aqu´ı implementado un mayor grado de dificultad tanto para el an´alisis del sistema como para el dise˜no e implementaci´on de controladores en el mismo.
Se desarroll´o la funci´onCSPI(Tiempo,’COM’) en MatLabr para que el usuario
inter-act´ue con el sistema de p´endulo invertido, por medio de la aplicaci´on de controladores propios y la visualizaci´on de los comportamientos de las variables que componen el sistema controlado.
Cap´ıtulo 2
Dise˜
no del Prototipo
2.1.
Selecci´
on de la estructura de p´
endulo invertido a
dise˜
nar
En la literatura se encuentran varias estructuras para el desarrollo de un sistema de p´endulo invertido:
Sistema de p´endulo invertido en base lineal: es la estructura m´as com´un y la cual se observa en la Fig.2-1(a). Se compone de un veh´ıculo (carro o riel) que tiene la funci´on de balancear el p´endulo, el cual puede moverse en ´unica dimensi´on y cuyo movimiento est´a gobernado por un motor DC (actuador) localizado en uno de los extremos de la barra horizontal y que est´a adherido al carro por medio de un engranaje y una banda de conexi´on. Sujeto al veh´ıculo se encuentra la barra pendular que, en estado de reposo, se encuentra en la posici´on vertical inferior y que se conoce como estado natural [44].
Sistema de p´endulo invertido de furuta: tambi´en conocido como p´endulo rotacional invertido. Es un mecanismo sub-actuado con 2 grados de libertad y constituido por 2 eslabones, o brazos, y 2 articulaciones rotacionales. El primer eslab´on tiene la capaci-dad de girar en el plano horizontal, en uno de sus extremos se encuentra el actuador (motor), quien imprime sobre este la capacidad de movimiento, a su vez este se conec-ta al segundo eslab´on, o p´endulo, en el extremo restante mediante una articulaci´on, que puede girar libremente y permite su rotaci´on sobre el plano vertical [4], se puede observar en la Fig. 2-1 (b).
Sistema de p´endulo invertido sobre dos ruedas (Segway): se observa en la Fig. 2-1
8 2 Dise˜no del Prototipo
Sistema de p´endulo invertido en base circular: se basa en una trayectoria circular, con un grado de libertad y consiste en un riel o un carro sobre el cual se soporta el p´endulo, el cual se estabiliza por medio de movimientos circulares de derecha a izquierda, o viceversa. La plataforma de la base del carro contiene 2 ruedas (una de las cuales est´a dirigida y conectada a un motor DC) y un conector de audio (en el caso del p´endulo mostrado en la Fig. 2-1 (d)). Cuando el motor est´a activado, el carro gira alrededor de un c´ırculo con el centro del eje de rotaci´on en su conector de audio, el cual tiene 2 prop´ositos: primero, se utiliza como eje de rotaci´on del carro y, segundo, se utiliza para llevar la energ´ıa a la tarjeta del controlador. El p´endulo se une a la plataforma del carro por medio de un potenci´ometro con una posibilidad de giro de 180◦.
(a) Sistema de p´endulo invertido de trayectoria lineal [3].
(b) Sistema de p´endulo inver-tido de Furuta [5].
(c) Sistema de p´endulo invertido sobre dos ruedas (Segway) [7].
(d) Sistema de p´endulo invertido de tra-yectoria circular [8].
2.2 Recomendaciones para la construcci´on de equipos de laboratorio 9
A partir de las opciones anteriores, es necesario seleccionar cu´al de ellas es pertinente imple-mentar como prototipo para el laboratorio de control. Considerando el sistema de p´endulo invertido en base lineal, este ocupa un ´area bastante grande y tendr´ıa sentido para hacer pr´acticas demostrativas con una sola unidad dentro del laboratorio, pero no ser´ıa viable tener seis de ellos dentro de un laboratorio de las dimensiones de los laboratorios de la Universi-dad. El sistema de p´endulo invertido de furuta resulta ser adecuado para los prop´ositos del proyecto, en el sentido de que tiene un tama˜no relativamente peque˜no; sin embargo, necesita primero ser llevado a una posici´on de 90o respecto a la horizontal con un control de swing up y posteriormente si tener un control de estabilizaci´on en dicha posici´on, lo cual lo hace un sistema m´as complejo de lo que se necesitar´ıa, ya que lo que se busca es el refuerzo de conceptos b´asicos control; de manera adicional, ya fue implementado en el a˜no 2012 como proyecto de grado [6] y no tendr´ıa sentido volverlo a implementar. El sistema de p´endulo invertido sobre dos ruedas tambi´en fue implementado como proyecto de grado en la Uni-versidad [7]; sin embargo, este sistema tiene el problema de que al moverse libremente en el espacio tendr´ıamos en una sesi´on de laboratorio a 18 estudiantes movi´endose por toda la sala detr´as de su sistema, lo cual no es muy atractivo. Finalmente, el sistema de p´endulo invertido en base circular satisface resulta ser conveniente para los objetivos del proyecto, ya que es un sistema fijo, que perfectamente puede estar en un banco de laboratorio de la Uni-versidad junto con fuente, osciloscopio y dem´as equipos; adem´as, a diferencia del p´endulo de furuta, solamente necesita un tipo de control para estabilizarse, lo cual lo hace m´as sencillo y conveniente para el refuerzo de conceptos b´asicos control. Por todo lo anterior, para el presente proyecto se decidi´o implementar un sistema de p´endulo invertido de base circular.
2.2.
Recomendaciones para la construcci´
on de equipos
de laboratorio
Para la implementaci´on de prototipos de laboratorio es muy importante tener en cuenta recomendaciones tanto de tipo electr´onico como mec´anico, que delimitar´an, en un buen sentido, tanto el dise˜no como la implementaci´on del prototipo y lo har´an m´as o menos viable de ser reproducido en masa. A continuaci´on se detallan dichas recomendaciones o consideraciones.
2.2.1.
Dise˜
no Electr´
onico
Se han de tener en cuenta las siguientes consideraciones para implementar laboratorios de control [2]:
1. Formular los objetivos del experimento.
10 2 Dise˜no del Prototipo
en masa tiene un menor costo. Determinar si se va a utilizar componentes nuevos o usa-dos. Tener en cuenta los costos inesperados (partes con la misma finalidad, reparaci´on o remplazo de componentes).
3. Tener presente la estructura t´ıpica de un experimento en control: un proceso f´ısico con sensores, actuadores, fuentes de alimentaci´on, amplificadores operacionales, conden-sadores, resistencias, microcontrolador, si se desea un computador con una interface (tarjeta de adquisici´on de datos) para la comunicaci´on con el proceso f´ısico [9].
4. Para el dise˜no, es m´as productivo seguir procedimientos est´andar que lleven a resulta-dos satisfactorios, en lugar de emplear demasiado tiempo en procedimientos de dise˜no propio.
5. Una vez se ha dise˜nado y se tiene el presupuesto del proyecto, seleccionar los materiales.
6. A la hora de la implementaci´on: tener presente que el primer dise˜no no ser´a perfecto, dado que en la primera oportunidad no se consideran todas las variables que influyen en el problema. Ser cuidadoso con los planos del dise˜no, tanto electr´onico como mec´anico; tener mucho cuidado en la selecci´on y el dise˜no de los cables (fuente de error m´as probable en un sistema).
7. Respecto a los acondicionamientos de se˜nal, cerciorarse si el amplificador tiene alg´un filtro, ya que este podr´ıa modificar el comportamiento frecuencial de la planta.
8. En cuanto a los actuadores (amplificadores de potencia), se puede usar de dos clases principales: basados en PWM (modulaci´on de ancho de pulso) o lineales (de se˜nales continuas); si se desea aplicar un voltaje constante al sistema f´ısico, cerciorarse que el actuador tenga acoplamiento DC.
9. Documentar, ya que le permite a los ingenieros de un equipo conocer los problemas que se presentaron en una implementaci´on particular, para tratar de evitarlos y de esta forma ir evolucionando como equipo.
Adicionalmente para el dise˜no de PCB’s se han de tener en las siguientes normas b´asicas para el dise˜no de placas de circuito impreso [10]:
1. Se dise˜nar´a sobre d´ecimas de pulgada, de modo que se hagan coincidir las pistas con las l´ıneas de la cuadr´ıcula o formando un ´angulo de 45◦ con estas, y los puntos de soldadura con las intersecciones de las l´ıneas.
2.2 Recomendaciones para la construcci´on de equipos de laboratorio 11
3. No se realizar´an pistas con ´angulos de 90◦; cuando sea preciso efectuar un giro en una pista, se har´a con dos ´angulos de 135◦; si es necesario ejecutar una bifurcaci´on en una pista, se har´a suavizando los ´angulos con sendos tri´angulos a cada lado.
4. El ancho de las pistas depender´a de la intensidad que vaya a circular por ellas. Se tendr´a en cuenta que 0,8 mm puede soportar, dependiendo del espesor de la pista, alrededor de 2 A, 2 mm unos 5 A y 4,5 mm unos 10 A.
5. Entre pistas pr´oximas y entre pistas y puntos de soldadura, se observar´a una distancia que depender´a de la tensi´on el´ectrica que se prevea existir´a entre ellas; como norma general, se dejar´a una distancia m´ınima de unos 0,8 mm.; en casos de dise˜nos complejos, se podr´a disminuir los 0,8 mm hasta 0,4 mm. En algunas ocasiones ser´a preciso cortar una porci´on de ciertos puntos de soldadura para que se cumpla esta norma.
6. La distancia m´ınima entre pistas y los bordes de la placa ser´a de dos d´ecimas de pulgada, aproximadamente unos 5 mm.
7. Todos los componentes se colocar´an paralelos a los bordes de la placa. 8. No se pasar´an pistas entre dos terminales de componentes activos.
9. La pista debe disponerse sobre el nodo perpendicularmente, y no de forma tangencial. 10. Con el fin de facilitar una buena soldadura hay que evitar ´areas excesivas de cobre. 11. En los casos de pistas que se requieren grandes superficies de cobre, se debe dise˜nar
una rejilla de tipo rayado, con el fin de que el soporte aislante no se deforme.
12. Al trazar las pistas de uni´on entre varios nodos se debe evitar la formaci´on de ´angulos agudos entre nodos comunes que pueden producir puentes de soldadura.
2.2.2.
Dise˜
no Mec´
anico
El componente mec´anico es el elemento encargado de ejecutar el movimiento y de ser la estructura o soporte de los dem´as componentes. Para desarrollar dispositivos mec´anicos, la selecci´on de los materiales y los procesos para transformarlos en las partes m´oviles o es-tructurales del sistema, constituyen un pilar que garantiza el correcto funcionamiento del componente mec´anico dise˜nado. Por tal motivo, el proceso de selecci´on de los materiales de-be seguir una metodolog´ıa rigurosa, que permita conseguir un dise˜no con elevados est´andares de calidad, mientras que los costos de dise˜no, fabricaci´on, operaci´on y mantenimiento del dispositivo permitan mantener los niveles de competitividad del desarrollador [11].
12 2 Dise˜no del Prototipo
as´ı mismo la accesibilidad sencilla al sistema en general. Tambi´en se ha de tener en cuenta las piezas mec´anicas adicionales que se requieren para su funcionamiento, tales como aco-ples, torniller´ıa, ejes, anillos, rodamientos, chumaceras, entre otros. En caso de que se deban dise˜nar piezas, dado que estas no se encuentran en el mercado, en el dise˜no se han de tener claros los objetivos para los que se va a dise˜nar dicha pieza y as´ı mismo los elementos con los que se cuenta y sobre los cuales esta se va a elaborar. Por tanto, es importante tener presente las dimensiones de las piezas que se van a dise˜nar, as´ı como, la adecuada selecci´on de materiales y procesos que garanticen el correcto funcionamiento de dichas partes mec´anicas.
A la hora de seleccionar y/o dise˜nar una pieza mec´anica se han de tener en cuenta los siguientes requerimientos [11]:
Disponibilidad para su reemplazo.
Econom´ıa.
Rigidez.
Dimensionalmente estable a diferentes temperaturas.
Liviana.
Ciclo ´util de vida.
Resistente a la corrosi´on y al desgaste.
Que no tenga gran impacto sobre el medio ambiente o las personas.
Debe tener numerosos usos.
Conductividad el´ectrica (la parte electr´onica puede verse afectada).
Adicionalmente se debe tener en cuenta el proceso de dise˜no que se debe llevar a cabo, el cual se resume en la Fig. 2-2.
Cabe aclarar que existen tres m´etodos para la selecci´on de materiales [12]:
1. M´etodo tradicional: Mediante este m´etodo el ingeniero selecciona el material que
2.2 Recomendaciones para la construcci´on de equipos de laboratorio 13
Necesidad de Mercado
Diseño inicial Definición general
Definir especificaciones.
Determinar las funciones del sistema. Definir el principio de funcionamiento. Definir componentes y requerimientos de cada uno de ellos.
Modelar y analizar cada componente. Seleccionar los materiales de cada componente que cumplen los
requerimientos definidos previamente.
Analizar los componentes en detalle. Seleccionar proceso de fabricación. Especificar planos de diseño.
Fabricación de un prototipo.
Verificación de si el prototipo cumple las especificaciones definidas inicialmente.
En caso afirmativo, definir proceso de producción.
En caso negativo volver a las
etapas anteriores y modificar el diseño o la selección de materiales.
Análisis inicial de cada componente
Diseño detallado. Análisis detallado de componentes
Especificaciones de producto. Prototipo
Figura 2-2: Diagrama del proceso de dise˜no mec´anico [13].
2. M´etodo gr´afico: Este m´etodo se apoya en graficas (conocidas como mapas de
mate-riales), en las que se relacionan por pares ciertas propiedades de los materiales. En estos mapas se puede hacer una aproximaci´on del material m´as adecuado (perteneciente a una determinada familia de materiales), con base en la relaci´on de las propiedades m´as importantes que debe poseer el componente.
3. M´etodo con ayuda de bases de datos: En Internet existe una amplia gama de
14 2 Dise˜no del Prototipo
encapsulado tipo DIP (usado com´unmente) y respecto a la implementaci´on del prototipo mec´anico se tiene la necesidad de dise˜nar e implementar piezas removibles del sistema en caso de da˜no o reparaci´on.
Cabe aclarar que algunos de los materiales y/o componentes que se utilizaron para el desa-rrollo del proyecto, se seleccionaron debido a que el Grupo de Investigaci´on IDEAS de la Universidad Distrital Francisco Jos´e de Caldas ya contaba con ellos, como la tarjeta progra-madora para el microcontrolador.
2.3.
An´
alisis de requerimientos del sistema
*Sensores:
*Motor DC
*Adquisición datos: Microcontrolador *Comunicación serial PC
-Posición angular péndulo -Velocidad angular carro
*Base del carro *Carro
*Péndulo *Llantas
*Piezas mecánicas: Acoples *Anillo colector (Slip Ring)
Parte Mecánica
Sistema de Péndulo Invertido de Trayectoria Circular
Figura 2-3: Partes principales del sistema.
Para el desarrollo del prototipo se ha de tener en cuenta (Ver Fig. 2-3):
Funcionamiento al´ambrico en la planta. El sistema debe tener su propio sistema de alimentaci´on y no ir´a a bordo del carro para disminuir su peso y no necesitar un motor de mayor tama˜no.
Sensores: Para el correcto funcionamiento del sistema se requiere principalmente de
dos sensores, un sensor que mida el ´angulo de inclinaci´on del p´endulo y otro que mida lavelocidad angular del carro.
Actuadores: Para esta planta s´olo se requiere de un actuador el cual corresponde a
un motor DC, este se encargar´a de dar movimiento al carro y de esta forma mantener el p´endulo en equilibrio.
2.4 Selecci´on de componentes para la parte electr´onica del sistema 15
Definida la parte electr´onica y circuiter´ıa del prototipo, se dise˜na la estructura mec´anica sobre la cual ir´a montado el sistema de p´endulo invertido, de igual forma a partir de estas dos ´ultimas, se dise˜nan las piezas mec´anicas para el debido funcionamiento de la planta.
2.4.
Selecci´
on de componentes para la parte electr´
oni-ca del sistema
2.4.1.
Sensores
Sensor para el ´angulo de inclinaci´on
Potenci´ometro lineal: Dado que el sistema a implementar es de un ´unico eje se puede
llevar a cabo la medida del ´angulo a partir de un potenci´ometro; por tanto, se selecciona un potenci´ometro lineal con un giro aproximado de 270◦, ya que el ´angulo del p´endulo variar´a en un rango m´aximo de [−90◦,90◦]. (Fig. 2-4).
Figura 2-4: Potenci´ometro.
Sensor de velocidad del carro
Encoder:E22AEncoder ´optico incremental PITTMAN. En la Tabla2-1se pueden observar
las caracter´ısticas de este encoder y en la Fig.2-5se puede observar un diagrama esquem´atico del mismo.
VC
C
GND ChA ChB
16 2 Dise˜no del Prototipo
Tabla 2-1: Tabla de datos encoder Pittman serie E22A [14].
Datos encoder S´ımbolo Unidades Valor
Resoluciones disponibles - - 128, 256
Salida - - 2 canales en cuadratura
Interfaz de salida - - Compatible con TTL
Voltaje de alimentaci´on VCC VDC 4.5 a 5.5
Suministro de corriente ICC mA 20 max
Voltaje m´aximo de salida VOH V 2.4 min
Voltaje m´ınimo de salida VOL V 0.5 max
Frecuencia m´axima de operaci´on fmax kHz 40 Temperatura m´axima de operaci´on θmax ◦C -20 a 85
Peso (masa) WE g 3.7
2.4.2.
Motor
Teniendo en cuenta que toda la electr´onica al interior del sistema funcionar´a con fuentes DC de±12V, lo m´as natural es utilizar un motor DC. Teniendo en cuenta que el mismo ser´a el encargado de generar el movimiento del carro, para de esa forma producir movimiento en el p´endulo y lograr mantenerlo en la posici´on vertical, el motor debe tener el torque suficiente para mover el carro y la fuerza suficiente para generar movimientos bruscos que le permitan al carro manter el p´endulo en equilibrio. En ese sentido, resulta sensato pensar que un motor DC convencional, que est´a m´as orientado a tener alta velocidad de giro y bajo torque, no va a ser muy ´util. Por lo anterior, la forma de tener un motor DC con mayor torque es utilizando un motorreductor, en el cual a medida que se reduce la velocidad, se aumenta el torque generado.
Motorreductor: La informaci´on del motorreductor seleccionado se puede observar en la
Tabla 2-2 y una imagen del mismo se puede observar en la Fig.2-6.
Tabla 2-2: Tabla de datos del motor.
Datos Motor S´ımbolo Unidades Valor Voltaje de operaci´on VCC V -12 a 12
Velocidad sin carga VRP M RPM 200
Torque Stall Ts Kgf-cm 2
2.4 Selecci´on de componentes para la parte electr´onica del sistema 17
2.4.3.
Microcontrolador
El microcontrolador seleccionado corresponde alMSP430G2553de Texas Instruments que se muestra en la Fig. 2-8(a) as´ı como su diagrama funcional en la Fig. 2-8(b), puesto que, como se mencion´o anteriormente, ya se cuenta con su tarjeta programadora, adicionalmente por sus ventajas como facilidad en la programaci´on, conocimiento previo que se posee del mismo, dado que satisface las necesidades del sistema y debido a sus caracter´ısticas que se muestran en la Tabla 2-3, as´ı como su estabilidad, velocidad y experiencia que se tiene del mismo en el desarrollo de este tipo de aplicaciones, que arroja ´optimos y eficientes resultados. Adicionalmente, porque la planta posee un tiempo de muestreo de 30 ms, y en este microcontrolador la m´ınima es de 10 ms (se determin´o experimentalmente), y se considera que un periodo de 30mses adecuado para la implementaci´on de los PWM (la m´as baja posible para la aplicaci´on); en cuanto a FLASH se usan 7166 B y de RAM 162 B, por lo que este microcontrolador es suficiente y adecuado para la aplicaci´on, sin embargo, este microcontrolador tiene un costo mayor a otros en el mercado con caracter´ısticas similares.
Tabla 2-3: Caracter´ısticas microcontrolador MSP430G2553 [15].
Encapsulado PDIP
Pines 20
Voltaje Alimentaci´on 1,8 V-3,6 V
Consumo de energ´ıa Modo activo: 230µA a 1 MHz y 2,2 V Modo espera: 0,5µA Modo dormido: 0,1µA
Arquitectura RISC 16 bits
Tiempo ciclo de instrucci´on 62,5 ns
Frecuencia Interna: 16 MHz
Externa: 32 KHz
RAM 512 B
FLASH 16 KB
UART 1
I2C 1
SPI 1
ADC 8×10 bits
PWM 3
JTAG 1
Timers 2×16 bits
Puertos I/O 16
Temperatura −40◦Ca 85◦C
18 2 Dise˜no del Prototipo
(a) Microcontrolador MSP430G2553.
(b) Diagrama Funcional.
Figura 2-7: Microcontrolador MSP430G2553 [15].
Por tanto, para el desarrollo de la programaci´on del microcontrolador que permita la correcta interacci´on de los componentes de la planta se ha de tener en cuenta:
2.4 Selecci´on de componentes para la parte electr´onica del sistema 19
M´odulo ADC en secuencia: Para la captura del voltaje otorgado por el potenci´ometro lineal y del motor.
M´odulos PWM: Se deben implementar dos PWM para otorgar a la salida del micro-controlador los valores correspondientes a ´angulo de inclinaci´on y velocidad.
M´odulo de comunicaci´on UART: Para la comunicaci´on entre microcontrolador y PC. GPIO (Entradas y salidas de prop´osito general): El sistema posee dos entradas adicio-nales:
• Habilitaci´on o deshabilitaci´on de la comunicaci´on serial, para que de esta ma-nera el microcontrolador reconozca cual es el valor del voltaje en el motor, si el capturado por el ADC o el capturado por el receptor del microcontrolador en la comunicaci´on serial con el PC.
Y tres salidas:
• Para enviar datos binarios (10 bits) al DAC.
• Reloj para sincronizar el DAC con el microcontrolador.
• Para activar la captura de datos por el DAC, activo en bajo.
Cabe mencionar que se utiliza el oscilador interno del microcontrolador y se ajusta al m´aximo (16 M Hz) para trabajar el micro a m´axima velocidad, y se selecciona teniendo en cuenta que la velocidad de actualizaci´on del DAC es de 1,21M Hzy que la tarjeta de comunicaci´on trabaja con un frecuencia de 12 M Hz, por lo que la frecuencia seleccionada es suficiente.
2.4.4.
M´
odulo de comunicaci´
on
A pesar de que se cuenta con el Launchapad del microcontrolador, este no se usa para la comunicaci´on, debido a que se necesita para la ejecuci´on y depuraci´on de otros proyectos, por tanto, para la comunicaci´on entre planta y PC se utiliza un m´odulo que se compone de un integrado FT232, que es un conversor de interfaz serial USB-UART y realiza la comunicaci´on v´ıa mini USB. En la Fig. 2-8(a) se puede observar el m´odulo y en la Fig.2-8(b) la conexi´on del integrado con un microcontrolador. Este integrado no requiere de cristal externo, su EEPROM es de 1024 bits, con tasas de transferencia de datos de 300 baudios a 3 Mbaudios a niveles TTL. Como se mencion´o anteriormente tiene soporte para la interfaz UART para 7 u 8 bits. Puede alimentarse entre 1,8 V a 5V, funciona en un rango de temperatura de
−40◦C a 85◦C y es compatible con la USB 2.0 a m´axima velocidad. Para la instalaci´on de los drivers para el respectivo funcionamiento del m´odulo se debe consultar la p´agina:
20 2 Dise˜no del Prototipo
(a) M´odulo FT232 [16].
(b) Diagrama de conexi´on a microcontrolador [17].
Figura 2-8: FT232.
Cabe mencionar que el microcontrolador se ajust´o a un tasa de 9600bps(lo que corresponde a 9600/8 = 1200 baudios), dado que se observ´o que en MatLabr se opera bien con esta velocidad, otra genera problemas en la comunicaci´on volvi´endola m´as lenta.
2.4.5.
Otros componentes electr´
onicos
Adicionalmente se debe contar con:
DAC: Para la etapa de potencia del motor. El DAC a utilizar corresponde alTLC5615
2.4 Selecci´on de componentes para la parte electr´onica del sistema 21
la tensi´on de referencia. El diagrama funcional del DAC se muestra en la Fig. 2-9y de igual forma en la Tabla 2-4se muestran las funciones de las terminales del DAC.
Figura 2-9: Diagrama funcional del DAC [18].
Tabla 2-4: Funciones terminales del DAC TLC5615 [18].
Nombre Terminal No. Pin I/O Descripci´on
DIN 1 I Entrada de datos seriales
SCLK 2 I Entrada de reloj serial
¯
CS 3 I Selecci´on de chip, activo en bajo
DOU T 4 O Salida de datos seriales para la conexi´on en serie
AGN D 5 Tierra anal´ogica
REF IN 6 I Entrada de referencia
OU T 7 O Salida de voltaje anal´ogico
VDD 8 Voltaje de alimentaci´on
Reguladores de voltaje: Para la alimentaci´on del microcontrolador y el DAC.
Atenuador: Para capturar con el microcontrolador (ADC) el voltaje en el motor.
Amplificadores: Para otorgar el valor del ´angulo cuyo intervalo corresponde a (−90◦,90◦) en valores de voltaje a (−9V,9 V), para el valor de la velocidad cuyo intervalo se su-pone en (−10 rad/s,10 rad/s) en valores de voltaje a (−10 V,10 V) y otro para el valor de voltaje en el motor en un rango de (−12 V,12V).
Comparadores de voltaje: Para la respectiva etapa de protecci´on a las salidas del
sistema.
Transistores: Para la etapa de potencia del motor, tanto NPN como PNP, as´ı como
22 2 Dise˜no del Prototipo
Condensadores: Para filtrar el ruido generado en el circuito debido al motor.
Anillo Colector (Slip Ring): Para evitar que los cables de alimentaci´on y
comu-nicaci´on que van del carro a la base del mismo, de tal forma que este puede girar m´as de 360◦.
Los componentes utilizados para el dise˜no electr´onico se muestran en la Tabla 2-5.
Tabla 2-5: Componentes electr´onicos.
Elementos Objetivo Cantidad Referencia
Microcontrolador An´alisis de las variables del sistema 1 MSP430G2553 Potenci´ometro lineal Sensor de captura ´angulo inclinaci´on 1
Motor Movimiento carro 1
Encoder Sensor velocidad del carro 1 Pittman E22A
DAC Etapa potencia motor 1 TLC5615
Tarjeta FT232 Comunicaci´on con el PC 1 FT232
Transistores encapsulado TO-220 Etapa potencia motor 2
Transistor NPN 1 TIP41
Transistor PNP 1 TIP42
Transistores encapsulado TO-92 Varios 6
Transistor NPN 5 2N3904
Transistor PNP 1 2N3906
Amplificadores Operacionales Atenuador voltaje motor 5 LF353 Amplificador voltaje motor
Seguidor voltaje etapa potencia motor Amplificador ´angulo Amplificador velocidad
Comparador para protecci´on ´angulo 1 Comparador para protecci´on velocidad 1 Seguidor voltaje para canal A del encoder
Regulador de voltaje Alimentaci´on: 3.6 V del microcontrolador 1 LM317 Regulador de voltaje Alimentaci´on: 5V del DAC 1 LM7805
Resistencias Varios 55
Switch Activar/desactivar Comunicaci´on micro-PC 2 Encendido/apagado de la planta
Rel´es Protecci´on salidas sistema 2 JQC-3F
Condensadores Varios 6
2.5 Dise˜no electr´onico 23
2.5.
Dise˜
no electr´
onico
Una vez seleccionados los principales componentes electr´onicos y electromec´anicos, en el caso del motor, es necesario dise˜nar los circuitos electr´onicos que permitan que todos los componentes previamente seleccionados funcionen de manera adecuada en el sistema. A continuaci´on se detallan los circuitos electr´onicos dise˜nados y se explica su finalidad.
2.5.1.
Captura y entrega datos
Captura del voltaje del motor
Cuando la entrada del sistema es anal´ogica, se debe proteger al microcontrolador de los voltajes que sobrepasan su capacidad y poder capturar los datos otorgados, se procede a realizar un atenuador para el voltaje del motor de (12 V,−12 V) a (3,6 V,0 V) para un V0 = 203 Vi+ 1,8, tal y como se observa en la Fig. 2-10.
-Vcc
Vcc
34K
5.1K
34K
3K
5.1K
LF353
ADCMotor VMotor
Vcc
Figura 2-10: Atenuador para capturar el voltaje del motor.
Captura voltaje potenci´ometro lineal
Para capturar el voltaje sobre el potenci´ometro, este se alimenta con los 3,6V de alimenta-ci´on del microcontrolador y as´ı evitar una atenuaci´on innecesaria, de esta forma el pin del potenci´ometro es enviado directamente a una entrada ADC en el microcontrolador ( P1.3 Ver Fig. 2-15).
Captura flancos canal A del encoder
24 2 Dise˜no del Prototipo
se produc´ıa una ca´ıda de voltaje, raz´on por la cual se tom´o la decisi´on de implementar un seguidor de voltaje entre el canal del encoder y la entrada del microcontrolador tal y como se observa en la Fig.2-11.
-Vcc
Vcc
LF353
ChA ChA-Encoder
Figura 2-11: Seguidor de voltaje para el canal del encoder dirigido al microcontrolador.
Entrega voltaje correspondiente al ´angulo y velocidad
Dado que las salidas del sistema son an´alogas y corresponden a los voltajes que representan en ´angulo del p´endulo y la velocidad del carro, para la generaci´on de estos voltajes se imple-mentan dos amplificadores tal y como se observa en la Fig. 2-12. Un amplificador para el voltaje correspondiente al valor del ´angulo de (0V,3,6V) a (−9V,9V) para unV0 = 5Vi−9,
y otro amplificador para el voltaje correspondiente al valor de la velocidad de (0 V,3,6 V) a (−10V,10 V) para un V0 = 509Vi −10. Cabe aclarar que el valor del voltaje otorgado, se
genera en el microcontrolador a partir de un PWM.
Ángulo
-Vcc
Vcc 2.4K
12K
16K
3K
LF353
PWMAng
(a) Entrega valor ´angulo.
-Vcc
Vcc
1.8K
10K
22.5K
2.4K
LF353
Velocidad PWMVel
12K
Vcc
(b) Entrega valor velocidad.
Figura 2-12: Amplificadores para otorgar los voltajes correspondientes a los valores del
´
angulo y velocidad dados por el microcontrolador.
2.5.2.
Etapa potencia motor
Para la etapa de potencia del motor, se decidi´o usar un DAC el cual se alimenta con 5V (Fig.
2.5 Dise˜no electr´onico 25
a (−12V,12V) para unV0 = 245Vi−12 (Fig.2-13(b)). Finalmente, seguido del amplificador
se implementa la etapa de potencia Darlington, tal y como se muestra en la Fig. 2-13 (c).
TL
C56
15
DIN CLK CS VDD OUT REFIN AGND DOUT Gnd 7805 Out In Vcc 1K 1K 100nF (a) DAC. -Vcc Vcc 2.5K 12K 10K 3K LF353 VolMotor outDAC 12K Vcc (b) Amplificador. Vcc -Vcc -Vcc Vcc LF353 VolMotor(c) Etapa de potencia.
Figura 2-13: Etapa de potencia para el motor.
2.5.3.
Comunicaci´
on microcontrolador-PC
La comunicaci´on entre microcontrolador y PC se realiza por medio de la Tarjeta FT232 [16], tal y como se muestra en la Fig. 2-14.
2.5.4.
Microcontrolador
26 2 Dise˜no del Prototipo
TX RX
FT232
1 2 3 4 5
3.3V 5.0V RXD TXD GND
Figura 2-14: Comunicaci´on microcontrolador-PC por medio de la tarjeta FT232.
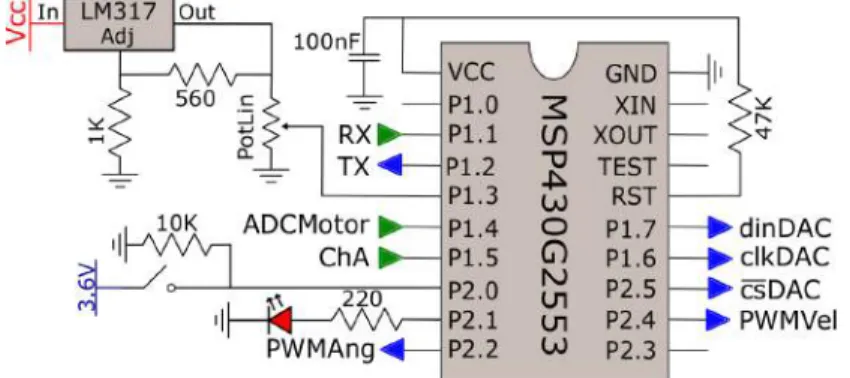
In Out Adj LM317 560 1K Vcc MSP43 0G25 53 VCC P1.0 P1.1 P1.3 P1.4 P1.5 P2.1 P2.2 GND XIN XOUT TEST RST P1.7 P1.6 P2.5 P2.4 P2.3 P1.2 P2.0 TX
Figura 2-15: Diagrama circuital microcontrolador.
2.5.5.
Etapa de protecci´
on para las salidas
Para proteger las salidas del sistema (´angulo y velocidad) de cortos con la fuente, se procede a dise˜nar dos comparadores de tal forma que cuando el voltaje en dicho pin supere los±10V, dado que la fuente es de ±12V, se dispara cualquiera de los comparadores y por medio de una OR dise˜nada con transistores, se env´ıa un voltaje de saturaci´on para activar un rel´e y abrir el circuito. Ver Fig. 2-16.
2.6.
Selecci´
on de componentes para la parte mec´
anica
del sistema
2.6.1.
Selecci´
on componentes y piezas
Para la parte mec´anica de la planta se ha de tener en cuenta que esta debe contar con:
Llantas que permitan el movimiento del carro. (Fig. 2-17).
2.6 Selecci´on de componentes para la parte mec´anica del sistema 27
1K
10K
Vcc
1K
10K
-Vcc
-Vcc Vcc
LF353
ÁnguloProtec
-Vcc Vcc
LF353 10K
10K
3904
4.7K
Vcc
3904
Ángul
o
Figura 2-16: Protecci´on de las salidas ´angulo y velocidad a cortos con la fuente.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-17: Llanta.
Pista o base circular sobre la cual se mover´a el carro y dentro de la cual se colocar´an las respectivas fuentes de voltaje as´ı como la PCB, la conexi´on al PC por mini USB y la cual servir´a para la protecci´on de los circuitos y de igual forma para para proveer al usuario las variables necesarias para el funcionamiento del controlador
28 2 Dise˜no del Prototipo
anillo colector usado, fue fabricado por adafruit [19], permite 6 conexiones con valores m´aximos de 240V 2A cada uno, con un calibre de 26 AWG y una velocidad nominal de 300 RPM (o m´as velocidad pero se reduce la vida ´util y se vuelve m´as sensible al ruido), en la Fig. 2-18 se pueden observar las dimensiones de dicho anillo.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-18: Anillo Colector (Slip Ring).
El anillo colector, anillo de deslizamiento o bien conocido como Slip Ring, es un disposi-tivo electromec´anico que permite la transmisi´on de se˜nales el´ectricas de una estructura estacionaria a una estructura giratoria, eliminando los efectos de la torsi´on de los cables en movimiento. El anillo colector consiste en una corona circular conductiva montada en un eje y aislada de ´el, donde las conexiones el´ectricas se realizan con contactos de deslizamiento, es decir, las conexiones fijas o escobillas del mismo, est´an en contacto constante con el anillo, transfiriendo as´ı la energ´ıa el´ectrica del exterior, a la parte ro-tativa del sistema [20]. En la Fig.2-19, se puede observar con mayor detalle las partes y el funcionamiento de este dispositivo.
P´endulo, varilla vertical que realiza el respectivo movimiento angular y la cual se desea mantener en equilibrio sobre su eje vertical.
Pieza mec´anica que permita el movimiento libre del p´endulo, limite el rango de varia-ci´on del ´angulo en el mismo y sea anti choques para evitar da˜nos debido al golpe del p´endulo con el carro en momentos de ca´ıda libre.
Acople p´endulo y potenci´ometro, para que de esta manera el potenci´ometro se mueva conforme se mueve el p´endulo, y as´ı realizar una lectura adecuada del ´angulo o la posici´on angular en la que se encuentra el p´endulo
Acoples motor, para que est´e ajustado y estable en el carro
2.6 Selecci´on de componentes para la parte mec´anica del sistema 29
(a) Funcionamiento de un anillo colector [21]. (b) Slip Ring de 4 anillos [20].
Figura 2-19: Funcionamiento de un anillo colector.
Acople llanta libre, para el movimiento adecuado de la otra llanta del carro y para mantenerla estable.
Acople encoder, para mantenerlo estable sobre el carro. Acople entre el carro y su base por medio del anillo colector.
Las piezas utilizadas para el dise˜no mec´anico se resumen en la Tabla 2-6.
2.6.2.
Selecci´
on materiales
Teniendo en cuenta las caracter´ısticas de cada componente mec´anico y la funcionalidad que deben cumplir, para la implementaci´on de la carrocer´ıa y la base del carro se decide utilizar el material de acr´ılico, mientras que para el acople del motor a la llanta, acero inoxidable dada su dureza, y para las dem´as piezas mec´anicas, aluminio.
30 2 Dise˜no del Prototipo
Tabla 2-6: Piezas Mec´anicas.
Elementos Objetivo Cantidad
Llantas Movimiento del carro 2
Anillo Colector (Slip Ring) Giros del carro por m´as de 360◦ 1
P´endulo Pieza a estabilzar 1
Acople carro-anillo colector Asegurar anillo colector al carro 1
Acoples motor Asegurar motor al carro 2
Acople motor-llanta Transmisi´on movimiento a la llanta 1 1 Acople llanta libre Movimiento libre llanta 2 1
Acople encoder Asegurar encoder al carro 1
Acople p´endulo-potenci´ometro Sensar valor ´angulo 1 Pieza mec´anica p´endulo Asegurar, permitir movimiento del p´endulo 1
Limitar rango del ´angulo del p´endulo
Carrocer´ıa Carro 1
Pista Soporte para el carro 1
Acr´ılico
Es un pol´ımero (compuesto qu´ımico), dentro de sus caracter´ısticas t´ecnicas se encuentran [22]:
Ligero con una densidad de 1190 kg/m3. Resistencia al impacto.
Tiene un menor peso que el vidrio y tiene alta capacidad de conservaci´on. Transparencia superior al 92 % (el m´as transparente de los pl´asticos). Resistencia qu´ımica, resiste a la mayor´ıa de las substancias qu´ımicas.
Resistencia a la intemperie, el acr´ılico soporta largas horas a la exposici´on de los rayos ultravioletas, sin da˜nar su estructura y los colores del mismo.
Estabilidad dimensional, si bien la l´amina de acr´ılico se expande y contrae a conse-cuencia de cambios de temperatura y niveles de humedad, no encoge con la edad. Excelente aislante t´ermico y ac´ustico, es un aislante el´ectrico con una constante diel´ ectri-ca elevada.
F´acil combusti´on, no produce gases t´oxicos al arder. Facilidad de mecanizaci´on y moldeo.
2.6 Selecci´on de componentes para la parte mec´anica del sistema 31
Aluminio
Es el tercer elemento qu´ımico m´as abundante de la corteza terrestre; este metal posee una combinaci´on de propiedades que lo hacen muy ´util en ingenier´ıa mec´anica [23], tales como:
Baja densidad: 2700Kg/m3.
Dureza (resistencia a dejarse penetrar).
Ductilidad, permite la fabricaci´on de cables el´ectricos.
Maleabilidad, permite la producci´on de l´aminas muy delgadas. Resistencia al desgaste aceptable.
De f´acil mecanizado dado que es un material blando, f´acilmente soldable, que forma aleaciones con otros metales para mejorar las propiedades mec´anicas.
Permite la fabricaci´on de piezas por fundici´on, forja (compresi´on) y extrusi´on.
Gracias a su alto estado de oxidaci´on, al contacto con el aire se forma r´apidamente una capa protectora de ´oxido de aluminio, proporcion´andole resistencia y durabilidad, lo que lo hace resistente a la corrosi´on
El aluminio posee 1/3 de la rigidez del acero.
Es un material f´acilmente reciclable, sin un elevado coste.
Acero Inoxidable
Es una aleaci´on de hierro con peque˜nas cantidades de carbono, 10 % de cromo y otros elemen-tos, con gran resistencia a la corrosi´on, dentro de sus caracter´ısticas t´ecnicas se encuentran [24]:
Tenacidad, es capaz de absorber energ´ıa sin producir fisuras (resistencia al impacto). Ductilidad, es relativamente d´uctil, con ´el se obtienen hilos delgados llamados alambres. Maleable, se pueden obtener l´aminas delgadas llamadas hojalata.
Resistencia al desgaste, es resistente a la erosi´on cuando est´a en contacto de fricci´on con otro material.
Maquinabilidad, permite una buena mecanizaci´on en m´aquinas y/o herramientas antes de recibir un tratamiento t´ermico.
32 2 Dise˜no del Prototipo
Trabajabilidad, se pueden cortar y perforar a pesar de que es muy resistente y aun as´ı siguen manteniendo su eficacia.
Soldabilidad, es un material que se puede unir por medio de soldadura y gracias a esto se pueden componer una serie de estructuras con piezas rectas.
Forjabilidad, al calentarse y al darle martillazos se les puede dar cualquier forma desea-da.
Alta resistencia mec´anica, los aceros son materiales con alta resistencia mec´anica al someterlos a esfuerzos de tracci´on y compresi´on.
Reciclabilidad.
Caucho
Es un pol´ımero el´astico con una densidad de 950 Kg/m3, dentro de sus caracter´ısticas t´ecnicas se encuentran [25]:
Elasticidad, la cualidad m´as importante de caucho es su elasticidad, puede ser estirado o compactado y a continuaci´on, vuelve a su forma original.
Flexibilidad.
Maleabilidad.
Resistencia diel´ectrica.
Resistencia al desgarre.
Resistencia a la abrasi´on o desgaste por fricci´on.
Resistencia al impacto.
Resistencia a la intemperie.
Amortiguador de vibraciones.
2.7.
Dise˜
no mec´
anico (aproximado)
2.7 Dise˜no mec´anico (aproximado) 33
Tabla 2-7: Accesorios para el ensamble de las piezas.
Nombre Accesorio Cantidad
Tornillo 1/800 8
Longitud: 28 mm TRL18
Tornillo 1/800 28
Longitud: 18 mm TRC18
Tuerca 1/800 40
TU18
Arandela 30
AR
Prisionero bristol 1/800 4 Longitud: 6 mm PB18
Rodamiento 1/800 1
Di´ametro exterior: 7 mm RO18
Rodamiento 3/800 2
Di´ametro exterior: 22 mm RO38
2.7.1.
Carro
El Carro es el encargado de generar el movimiento necesario para mover el p´endulo sobre ´
el y mediante el controlador mantenerlo en equilibrio; en la Fig. 2-20 se puede observar el esquema general del carro con cada una de sus partes.
Partes del carro
Teniendo en cuenta las dimensiones de los accesorios mostrados en la Tabla2-7, as´ı como del motor, encoder, potenci´ometro y anillo colector, se procede a dise˜nar las piezas del sistema, cuyas medidas se encuentran en unidades de mm:
1. P´endulo. Se dise˜na de tal forma que en un extremo tiene una terminaci´on en tornillo
34 2 Dise˜no del Prototipo
4
2 13
6
10 12
9 8 11
5
3 1
7
Figura 2-20: Carro.
par´ametros a tener en cuenta en el p´endulo son su grosor y longitud, sin embargo, el p´endulo usado consiste en una antena en la cual se puede variar la longitud del mismo, por lo cual el p´endulo tiene una longitud m´ınima de 32,5 cm y m´axima de 80 cm. Ver Fig.2-21.
Figura 2-21: P´endulo.
2. Pieza mec´anica para libre movimiento del p´endulo. Para esta pieza se tuvo en
cuenta la dimensiones de los rodamientosRO38, de las varillas limitadoras y se dise˜na en forma de arco debido el movimiento angular del p´endulo. Ver Fig. 2-22.
2.7 Dise˜no mec´anico (aproximado) 35
(a) Vista Frontal. (b) Vista Superior.
(c) Vista General.
Figura 2-22: Pieza mec´anica para el movimiento del p´endulo.
del potenci´ometro, del p´endulo y la pieza mec´anica anterior. Ver Fig. 2-23.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-23: Acople potenci´ometro-p´endulo.
4. Acople motor. Para este acople se tuvo en cuenta las dimensiones del motor. Ver Fig.
2-24.
5. Acople llanta-motor. Para este acople se tuvo en cuenta las dimensiones de la llanta
y el eje del motor. Ver Fig. 2-25.
dimen-36 2 Dise˜no del Prototipo
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-24: Acople motor.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-25: Acople motor-llanta.
siones del eje de la llanta, el rodamiento RO18 y la altura del motor sobre la base del carro. Ver Fig.2-26.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-26: Chumacera llanta libre.
7. Acople encoder. Para este acople se tuvo en cuenta las dimensiones del encoder. Ver
Fig.2-27.
8. Acople anillo colector-carro. Para este acople se tuvo en cuenta las dimensiones
del anillo colector. Ver Fig.2-28.
9. Anillo Colector (Slip Ring).
10. Llantas.
2.7 Dise˜no mec´anico (aproximado) 37
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-27: Acople encoder.
12. Motor.
13. Potenci´ometro.
(a) Vista Frontal. (b) Vista Superior. (c) Vista General.
Figura 2-28: Acople anillo colector-carro.
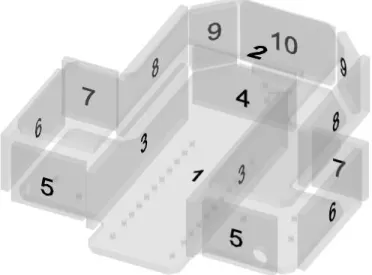
Ensamble carrocer´ıa
Se determina teniendo en cuenta las dimensiones de los acoples, la pieza mec´anica del p´ endu-lo, el motor, el encoder, el potenci´ometro, las llantas y la mini PCB, as´ı como el desplaza-miento lineal que realizar´a la pieza mec´anica sobre la cual se soporta el p´endulo. En la Fig.
2-29, se muestran cada una de las caras que componen la carrocer´ıa y de igual forma se puede observar como ensamblar cada una de ellas.
38 2 Dise˜no del Prototipo
Figura 2-29: Ensamble Carrocer´ıa.
(a) Tapa Inferior. (b) Tapa Superior.
![Figura 2-2: Diagrama del proceso de dise˜ no mec´ anico [13].](https://thumb-us.123doks.com/thumbv2/123dok_es/5662034.739581/39.918.225.730.139.654/figura-diagrama-del-proceso-de-dise-mec-anico.webp)
![Tabla 2-1: Tabla de datos encoder Pittman serie E22A [14].](https://thumb-us.123doks.com/thumbv2/123dok_es/5662034.739581/42.918.189.687.189.424/tabla-tabla-datos-encoder-pittman-serie-e-a.webp)