UNIVERSIDAD NACIONAL DE EDUCACIÓN
Enrique Guzmán y Valle
Alma Mater del Magisterio Nacional
FACULTAD DE TECNOLOGÍA
Escuela Profesional de Electrónica y Telecomunicaciones
MONOGRAFÍA
Simulación de un PIC en Proteus
Examen de Suficiencia Profesional Resolución N° 0006-2018-D-FATEC
Presentada por:
Giraldo Cama Apaza
Para optar al Título Profesional de Licenciado en Educación
Especialidad: Electrónica e Informática
MONOGRAFÍA
Simulación de un PIC en Proteus
Designación de Jurado Resolución Nº 0006–2018–D-FATEC
MIEMBROS DEL JURADO:
PRESIDENTE : Dr. Fidel Tadeo SORIA CUELLAR ____________________
Firma
rlos Enrique NIÑO CUEVA ____________________ Firma
Dedicatoria
Al ser supremo que nos da la vida y nos guía por el
camino correcto para ser útiles a la sociedad, brindándonos
las oportunidades y las fuerzas para seguir adelante y
cumplir con las metas trazadas, superando los escollos que
se presenten.
A mis PADRES, quienes supieron inculcarme con
ejemplo y consejos sabios, el deseo de superación en el
aspecto personal y profesional, siendo guías constantes para
ser un hombre de bien.
A mis COMPAÑEROS DE ESTUDIOS, por los
momentos que pasamos durante nuestra vida universitaria,
apoyándonos de forma incondicional, para culminar la
Agradecimiento
A la Universidad Nacional de Educación Enrique
Guzmán y Valle “Alma Máter del Magisterio Nacional”,
por brindarnos una educación de calidad en el campo de la
tecnología electrónica y de formarnos, además, como
profesionales idóneos en el campo de la educación
tecnológica.
A los docentes que participaron en nuestra formación
académica, quienes supieron inculcarnos también, los
valores morales necesarios para ser profesionales modelos
en el campo de la educación.
A mis amigos, compañeros de trabajo y demás
personas, que me apoyaron para poder culminar con éxito el
Contenido
Carátula i
Contracarátula ii
Dedicatoria iii
Agradecimiento iv
Contenido v
Índice de figuras x
Índice de tablas xiv
Introducción xv
Capítulo I
Microcontroladores PIC
1.1.Generalidades 18
1.2.Definición 19
1.3.Diferencias entre microprocesadores y microcontroladores 20
1.4.Aplicaciones con microcontroladores 21
1.5.Arquitecturas 23
1.5.1. Von Newman 23
1.5.2. Harvard 24
1.5.3. CISC 25
1.5.4. RISC 26
1.5.5. SISC 26
1.6.Familias de PIC 26
1.6.1. Gama enana 27
1.6.2. Gama baja 28
1.6.3. Gama media 29
1.6.4. Gama alta 31
1.6.5. Gama mejorada 32
1.7.Etapas básicas 33
1.8.Sistemas microcontrolados 35
1.8.1. Dispositivos de entrada 36
1.9.Herramientas de sistemas 37
1.9.1. Ensamblador 38
1.9.2. Compilador 38
1.9.3. Simulador 38
1.9.4. Placas de evaluación 38
1.9.5. Emuladores en circuito 38
1.9.6. Programador 39
1.9.7. Paquetes IDE 39
Capítulo II
Diseño con Proteus VSM versión 8,6
2.1. Aspectos generales 41
2.1.1.¿Qué es el PROTEUS VSM? 41
2.1.2.Elementos que contiene el PROTEUS VSM 41
2.1.3.Características principales del PROTEUS 42
2.2.Instalación del programa 43
2.3.Creación de nuevo proyecto en ISIS 46
2.4.La interfaz de ISIS 50
2.4.1.Distribución de la pantalla 50
2.4.2.La hoja de trabajo 51
2.4.3.La rejilla 51
2.5.Barra de herramientas 52
2.5.1.Clases 52
2.5.2.Herramientas de modo 53
2.5.3.Elegir componentes de las librerías 55
2.5.4.Colocar un componente 58
2.5.5.Manipular componentes en la ventana de edición 60
2.6.Herramientas de visualización 61
2.6.1.Diversidad de herramientas 61
2.6.2.Herramientas para edición 63
2.7.Conexiones 64
2.7.1.Pasos para conectar componentes 64
2.8.1.Pasos para dibujar un circuito en ISIS 67
2.8.2.Guardar diseño 68
2.9.Simulación 68
2.9.1.Componentes que se pueden simular y los que no se puede simular 68
2.9.2.Librería Active y componentes especiales 69
2.9.3.Los controles de simulación 71
2.9.4.El informe de simulación 71
2.9.5.Ejemplo de simulación analógica 72
2.9.6.Ejemplo de Simulación Digital 73
Capítulo III
Proyecto: Simulación de un PIC en PROTEUS
Módulo: Temporizador con el microcontrolador PIC 16F628A con alarma y display LED
3.1.Fundamentación 75
3.2.Objetivos 76
3.2.1.Objetivo General 76
3.2.2.Objetivos Específicos 76
3.3.Diseño del proyecto 77
3.3.1.De la simulación 77
3.3.2.De la elaboración del módulo 77
3.3.3.Diagrama en bloques 78
3.3.4.Descripción de etapas 79
3.3.5.Diagrama esquemático 80
3.3.6.Características técnicas de los dispositivos 80
3.3.6.1. Microcontrolador PIC 16F628A 80
a. Características generales 81
b. Distribución de pines 82
c. Esquema Pictorico del PIC 16F628A 83
d. Arquitectura interna 84
e. Organización de memoria 85
f. El oscilador 85
3.3.6.3. Buzzer 88
3.3.6.4. Relé o Relay 90
3.3.6.5. Fuente de 220VAC a 12VDC 90
3.4.Planificación 91
3.4.1.Cronograma de actividades 91
3.4.2.Relación y costo de componentes 92
3.4.3.Gastos varios 92
3.4.4.Gasto total 92
3.5.Construcción del proyecto 93
3.5.1 Elaboración de la maqueta 93
3.5.2 Elaboración del circuito esquemático para simulación 93
3.5.3 Elaboración del circuito impreso 94
3.5.4 Armar el circuito 94
3.5.5 Diagrama de flujo del programa 95
3.5.6 Instrucciones del programa 104
3.5.7 Grabación del PIC 109
a. Etapas del proceso de grabación 109
b. Grabación con el PICKIT2 111
c. Programador PIC 115
3.6. Prueba del proyecto 115
3.7. Evaluación del proyecto 116
Capítulo IV Aplicación Didáctica
4.1. Sílabo 118
4.2. Sesión de aprendizaje 121
4.3. Hoja de Información 127
4.4. Hoja de Práctica 133
4.5. Evaluación 140
Resumen 142
Conclusiones y Recomendaciones 143
Conclusiones 144
Referencias 146
Apéndice 148
A. Glosario de términos 149
Índice de figuras
Figura 1. Estructura del microprocesador 20
Figura 2. Estructura del microcontrolador 21
Figura 3. Evolución del microprocesador 22
Figura 4. Arquitectura Von Newman 23
Figura 5. Arquitectura Harvard 24
Figura 6. PIC Gamma enana 27
Figura 7. PIC Gamma baja 28
Figura 8. PIC Gamma media 30
Figura 9. Etapas básicas del microcontrolador 33
Figura 10. Sistema General microcontrolador 36
Figura 11. Icono que identifica al PROTEUS 43
Figura 12. Seleccionar ejecutar como administrador 43
Figura 13. Selección de carpeta que contiene el programa 44
Figura 14. Selección de carpeta Menú-inicio 44
Figura 15. Instalación de archivos del programa 45
Figura 16. Instalación completada 45
Figura 17. Icono de Acceso directo 45
Figura 18. Apertura de nuevo proyecto 46
Figura 19. Colocar nombre del nuevo proyecto 46
Figura 20. Creación de un esquema 47
Figura 21. Seleccionar no crear circuito impreso 47
Figura 22. Componentes de circuito 48
Figura 23. Seleccionar No Firmware 48
Figura 24. Finalización de crear nuevo proyecto 49
Figura 25. Pantalla principal para esquematizar 49
Figura 26. Distribución de la pantalla 50
Figura 27. La hoja de trabajo 51
Figura 29. Clases de Barras de herramientas 52
Figura 30. Herramientas de modo 54
Figura 31. Elección de componentes 56
Figura 32. La ventana Pick Devices 56
Figura 33. Selección del componente 58
Figura 34. Pasar el componente a la ventana de edición 58
Figura 35. Buscar fijar el componente en la ventana de edición 59
Figura 36. Fijar el componente en la ventana de edición 59
Figura 37. Manipular el componente en la ventana de edición 60
Figura 38. Diversas herramientas de visualización 61
Figura 39. Herramientas de edición 63
Figura 40. Opciones de edición 64
Figura 41. Ubicar componentes. 64
Figura 42. Inicio de conexión 65
Figura 43. Conexión a realizar 65
Figura 44. Conexión realizada 66
Figura 45. Nueva conexión realizada 66
Figura 46. Ejemplo de circuito 67
Figura 47. Colocando dispositivos 67
Figura 48. Situar dispositivos en ventana de edición 67
Figura 49. Circuito realizado 68
Figura 50. Dispositivo que no se puede simular 69
Figura 51. Componentes de la librería ACTIVE del módulo ISIS 69
Figura 52. Controles de simulación 71
Figura 53. Simulación exitosa 72
Figura 54. Simulación con errores 72
Figura 55. Simulación de circuito analógico correcta 73
Figura 56. Simulación de circuito digital correcta 73
Figura 57. Medidas del módulo 77
Figura 59. Circuito esquemático del temporizador 80
Figura 60. Mapa de la memoria de programa 81
Figura 61. Distribución de pines modo físico 82
Figura 62. Esquema pictórico 83
Figura 63. Arquitectura interna 84
Figura 64. Organización de la memoria 85
Figura 65. Oscilación LP, XT y HS 86
Figura 66. Oscilación con resonador cerámico 87
Figura 67. Oscilación con reloj externo 87
Figura 68. Oscilación con RC 88
Figura 69. Display Led 88
Figura 70. Buzzer 89
Figura 71. Dimensiones del Buzzer 89
Figura 72. Relé o Relay 90
Figura 73. Aspecto interno 90
Figura 74. Fuente Conmutada 91
Figura 75. Módulo de madera 93
Figura 76. Circuito esquemático 93
Figura 77. Circuito impreso 94
Figura 78. Armado del circuito 94
Figura 79. Diagrama de flujo 96
Figura 80. Subrutina 1 97
Figura 81. Subrutina 2 98
Figura 82. Subrutina 3 99
Figura 83. Subrutina 4 100
Figura 84. Subrutina 5 101
Figura 85. Subrutina 6 102
Figura 86. Subrutina 7 103
Figura 87. Subrutina 8 103
Figura 89. Verificación de conexión del programador 111
Figura 90. Comunicación del PIC con el Software 112
Figura 91. Habilitación del PIC 112
Figura 92. Programar código 113
Figura 93. Cargar código 113
Figura 94. Exportar código 114
Figura 95. Almacenar código 114
Figura 96. Circuito del programador PIC 115
Figura 97. Ensamblado de partes 115
Figura 98. Circuito energizado 116
Índice de tablas
Tabla 1. Características de los PIC Gamma enana 28
Tabla 2. Características de los PIC Gamma baja 29
Tabla 3. Características de los PIC Gamma media PIC 16C6XX 30
Tabla 4. Características de los PIC Gamma media PIC 16C7X 31
Tabla 5. Características de los PIC Gamma media PIC 16FXX 31
Tabla 6. Características de los PIC Gamma alta 32
Tabla 7. Características de los PIC Gamma mejorada 18CXXX 32
Tabla 8. Características de los PIC Gamma mejorada 18FXXX 33
Tabla 9. Componentes de la librería ACTIVE del módulo ISIS 70
Tabla 10. Descripción de pines del PIC 16F628A 83
Tabla 11. Valores de capacitores para la frecuencia del cristal 1 86
Tabla 12. Valores de capacitores para la frecuencia del cristal 2 87
Tabla 13. Características técnicas del Buzzer 89
Tabla 14. Cronograma de trabajo 91
Tabla 15. Relación y costo de componentes 92
Introducción
Después de la aparición de los microprocesadores y su constante evolución que han
cambiado la vida de los seres humanos, al incursionar en todas sus actividades, tanto
domésticas, educativas, empresariales e industriales, se produce el diseño y elaboración de
otro dispositivo de mayor versatilidad, fácil acceso a instrucciones para realizar actividades
diversas, mayor velocidad y precio accesible, al cual se le denomina microcontrolador, que
constituye uno de los logros más sobresalientes del siglo XX, por la mayor influencia que
ha causado en el mundo actual, encontrándose en dispositivos con microondas,
refrigeradoras, autos, aviones, comunicaciones a distancia, receptores de tv y radio,
equipos de automatización, equipos médicos, telecomunicaciones, circuitos de control
electrónico de potencia etc.
Cada vez es más frecuente la aparición de nuevas familias de microcontroladores,
debido a que son requeridos para efectuar múltiples aplicaciones, por lo que se necesita
más velocidad y capacidad de memoria, así como mayor cantidad de puertos para las
entradas y salidas de información.
El presente trabajo constituye un aporte en cuanto a la evolución de los
microcontroladores, su estructura interna y sus aplicaciones básicas, con la finalidad de que
el profesional en la especialidad de electrónica, tenga conocimiento de este tema que es
muy importante en la vida del ser humano. El trabajo se desarrolla en cuatro capítulos:
El primer capítulo está referido a los microcontroladores en general, la definición, su evolución, estructura interna y las aplicaciones básicas en las que puede ser utilizado.
El segundo capítulo trata sobre el PROTEUS, que es un software electrónico muy potente, con una librería que contiene dispositivos modernos con sus respectivas
características técnicas, permitiendo el diseño de circuitos complejos tanto analógico como
digitales, siendo el aspecto más sobresaliente, el hecho de poder realizar la simulación del
circuito a diseñar, antes de elaborarlo físicamente y posteriormente realizar el circuito
impreso respectivo. El uso de este software por parte del diseñador, es una herramienta
El tercer capítulo trata sobre el proyecto de aplicación del microcontrolador 16F628A, que consiste en un circuito temporizador con regulación de tiempos en forma
externa, la cual puede ser programado por el usuario de acuerdo a una aplicación en
particular. Aquí se describen características técnicas del microcontrolador, el circuito del
temporizador, las instrucciones efectuadas, las funciones que realiza y las pruebas de
funcionamiento acorde a lo programado.
El cuarto capítulo desarrolla la aplicación pedagógica, en la que se detalla la elaboración del Sílabo, la hoja de información, la guía de práctica y el plan de lección,
Capítulo I
Microcontroladores PIC
1.1.Generalidades
Los microcontroladores PIC (Peripheral interface Controller), son circuitos
integrados lógicos que pueden ser programados, diseñados por Microchip con tecnología
RISC (Reduced Instruction Set Computer), con arquitectura interna especial de acuerdo a
cada modelo a utilizar.
Tienen similitud a un computador miniaturizado, conteniendo la mayor parte de
recursos como memoria ROM, RAM, datos, puertos I/O, temporizadores, comparadores,
convertidores A/D, USART, comunicación en serie para EEPROM y otras prestaciones
que varían de acuerdo a cada modelo en particular.
Este dispositivo representa la parte principal del circuito que se diseña para ejercer
control de periféricos, encargándose de la dirección del proceso o procesos del circuito en
particular diseñado, de acuerdo al conjunto de instrucciones contenidas en el programa, en
las que se encuentran las funciones de control debidamente especificadas, las cuales se
realizan mediante un determinado lenguaje de programación, que va a depender
principalmente del requerimiento o requerimientos de lo que se requiere diseñar para una
finalidad determinada en particular.
Antes de realizar el diseño del programa, hay que hacer un estudio previo del
hardware a utilizar para que el proyecto realice la función deseada. Con ello se logrará
determinar que función van a cumplir cada puerto y los pines de cada puerto. Es posible
configurar de acuerdo a la necesidad de diseño todo un puerto como salida o como entrada,
así como solamente utilizar algún o algunos pines para el cumplimiento de alguna función
determinada. Existe una larga lista de periféricos que pueden ser conectados al
motores que pueden ser rotativos simples o paso a paso, pulsadores, teclados, y otros que
se encuentran en el mercado electrónico.
Otro aspecto relevante es la elección apropiada del microcontrolador, ya que de ello
va a depender el éxito en la elaboración del diseño a elaborar, para cumplir estrictamente
con la idea primigenia.
1.2.Definición
Torres M. (2007), definió a los microcontroladores, como computadoras digitales
que se encuentran integradas en un solo chip y que en su interior cuentan con una unidad
central que procesa la información, conocida generalmente como CPU, memorias para
almacenar programas y datos, además de puertos de entrada y salida. También refiere que
son unidades autosuficientes y más económicas, comparados con los microprocesadores.
(p.3).
Reyes C. (2008), definió a los microcontroladores, como un circuito integrado cuyo
interior se encuentra conformado por circuitos diversos, que poseen la arquitectura de un
computador, es decir contiene el CPU que es la unidad central de proceso, memorias del
tipo RAM y EEPROM, también circuitos para entradas y salidas de datos. Un PIC de
fábrica no efectúa ninguna acción, ya que se encuentra en blanco, por lo que necesita que
se le programe internamente, es decir introducirle las instrucciones adecuadas para que
pueda realizar la acción requerida, que pueden ser funciones lógicas AND, NAND, OR,
NOR; conversores D/A, A/D, circuitos temporizadores y decodificadores, etc. (p.17).
Bodington C. (2008), definió a los microcontroladores PIC, que son dispositivos
que se parecen a un computador de tamaño pequeño, por contar con iguales recursos en
cuanto a memorias ya sean de programa, de acceso aleatorio, de datos éstas, también
contener puertos cuyos pines en forma parcial o total pueden ser usados como entradas o
salidas, también temporizadores, convertidores, comparadores, comunicación serial para
EEPROM, circuitos especiales como los USART, etc.
Teniendo en cuenta las anteriores definiciones, los microcontroladores son circuitos
integrados que realizan funciones propias de un computador, debido a que su estructura
interna contiene esta arquitectura, permitiéndole realizar una serie de funciones lógicas,
decodificación, etc. Pero para cumplir con todas estas acciones, requiere de una
programación mediante instrucciones debidamente codificadas, de acuerdo a las
actividades que va a realizar.
1.3.Diferencias entre microprocesadores y los microcontroladores.
La diferencia principal radica en la configuración interna de ambos, en este caso a
los microprocesadores se les fabrica con un sistema denominado abierto, es decir que todas
las partes que se encuentran en su interior para procesar la información que contienen,
tienen una configuración denominada abierta, la cual permite que pueda variarse acorde a
la aplicación que se desee destinar. Contienen partes básicas como el CPU para la
interpretación de las instrucciones, las diversas memorias mencionadas en el párrafo
anterior, los diversos buses de comunicación para la ejecución de datos y que se conectan
al exterior, justamente para conectarse con diferentes módulos de entrada y salida, además
de memorias, con la finalidad de configurarse de acuerdo a la aplicación que se quiere dar.
El esquema en la figura 1.
Sin embargo, los microcontroladores tienen un sistema el cual se caracteriza por ser
cerrado, por lo que todas las partes para el procesamiento se encuentran situados en el
interior del chip, saliendo al exterior mediante pines, las líneas que van a conectarse a los
periféricos que contemple el diseño en particular. El diagrama en bloques en la figura 2.
1.4.Aplicaciones con microcontroladores
Cada vez es más frecuente observar productos en todas las actividades del ser
humano, tanto domésticas, comerciales, empresariales, industriales, etc., que incorporan un
su diseño un chip microcontrolador, con la finalidad de incrementar las facilidades
ofrecidas al usuario, disminuir considerablemente el tamaño, peso, costo, bajo consumo de
energía, así como también mejorar la fiabilidad y calidad del producto.
Debido al uso cada vez más creciente de este dispositivo, los fabricantes de este
producto realizan ventas que superan millones de unidades, referido a un modelo que se
produce semanalmente. Existe muchos modelos en microcontroladores y tal vez una forma
de clasificarlos seria por el número de bits que ingresan a los buses que manejan datos y
señales, resaltando aquellos de cuatro (4), ocho (8), dieciséis (16) y treintaidos (32) bits;
hay que precisar que, a mayor cantidad de bits mejora la prestación del chip, por cuanto
pueden realizarse proyectos de mayor complejidad. El dominio del marcado lo tienen los
de 8 bits, siguiéndole los de 4 bits, debido fundamentalmente al costo y cumplir con los
requerimientos de proyectos de menor complejidad, ya que sería innecesario utilizar un
chip potente y más caro en la elaboración de un diseño pequeño.
Figura 2. Estructura del microcontrolador Fuente: Microcontroladores (2012)
µC Periféricos
La aplicación de microcontroladores según la actividad a desarrollar, puede ser
clasificado de la siguiente manera:
a. Domésticas
Receptores de televisión, sistemas de video: DVD, Blue Ray, juegos, lavadoras,
refrigeradoras, hornos microondas, equipos de sonido, juguetes, etc.
b. Comunicaciones
Sistemas de Telefonía fija y telefonía celular, equipos de transmisión y recepción,
sistemas satelitales, etc.
c. Computación
Equipos de cómputo, impresoras, módems, fotocopiadoras, monitores, etc.
d. Industria manufacturera
Sistemas de automatización y control, maquinaria ligera y pesada, montacargas,
sistemas de locomoción, etc
e. Industria automotriz
Comprende los sistemas integrales de encendido, de control de carga, de arranque,
de luces de encendido, de alarma, etc.
f. Otros
Equipos médicos, electrónica de potencia, sistemas de vigilancia, robótica,
instrumentación, equipos militares, etc.
En la actualidad se están utilizando con mayor frecuencia los microcontroladores
que usan 32 bits, los cuales tienen mucha acogida por ser utilizados para procesar todo tipo
de imágenes, en comunicaciones cercanas y a distancia, equipos para uso militar, procesos
industriales y control de dispositivos que almacenan datos masivos. Ver figura 3.
1.5.Arquitecturas
La arquitectura representa la forma de interconectar las partes internas del
microcontrolador con la CPU, como la memoria, y al conjunto de instrucciones que
conforman el programa. (Villamil H. 2009, pp. 143-147). Las principales son
1.5.1. Von Newman
Es una de las primeras arquitecturas diseñadas para la fabricación de
microprocesadores, cuya característica principal es que la conexión de la única memoria
que tiene el diseño, conteniendo los datos y las instrucciones con las que se elabora el
programa, se encuentra conectada al CPU, tal como se representa en la figura 4.
Un aspecto relevante para la comunicación entre etapas, lo constituye la capacidad
del único bus de memoria para transferir datos, que para este caso fue diseñada para 8 bits
que representa un byte (1 byte), representando una limitación en cuanto a velocidad en la
que opera el microprocesador, dado que tiene que comunicarse con varias unidades para el
procesamiento de la información. También se afecta notablemente la velocidad en el
proceso del microprocesador, cuando se tiene que transmitir información de más de un
byte, en este caso se tiene que acceder repetidamente a la memoria hasta dar termino a la
información requerida antes de iniciar la transferencia de otra información.
De lo anterior se puede deducir, que el presente diseño adolece de ciertas
limitaciones, pudiendo ser resumidas en dos:
a. Longitud de instrucciones: ante instrucciones de mayor complejidad por lo tanto mayor
longitud de datos, se tiene que efectuar repetidos accesos hacia la memoria con la finalidad
de procesar toda la información.
b. Velocidad de proceso o de operación: no hay superposición de tiempos para acceder a la
información, ya que hay solo una vía de comunicación, por lo que se produce el
denominado cuello de botella que retarda el proceso.
En este tipo de arquitectura se permite que los programas se diseñen con la
característica de código automodificable, lo cual era bastante usada en el diseño de
computadoras de esa época por estar constituidos básicamente por el reducido modo de
direccionamiento.
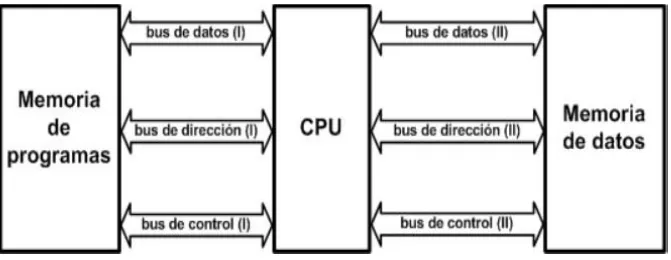
1.5.2. Harvard
En el diseño de esta arquitectura, la característica principal es la conexión que
existe entre las dos memorias y la CPU, la cual se realiza mediante dos buses que se
encuentran separados, logrando con ello una mejora en la velocidad del proceso de la
información, tal como se muestra en la figura 5.
La independencia total de los buses, da lugar a que puedan tener anchos diferentes,
por lo que la información que llegue a cada memoria puede llegar al CPU mediante una
única posición en la memoria de programa; la ventaja que se obtiene con este diseño
particular, es la de obtener mayor velocidad de procesamiento, debido a que el CPU se
encuentra en la capacidad de acceder simultáneamente a datos de una instrucción que se
está ejecutando y a la vez leer la siguiente instrucción que se va a ejecutar.
En resumen, las ventajas que ofrece este tipo de arquitectura con respecto a la
arquitectura tradicional, son las siguientes:
a. Las instrucciones y los datos pueden tener diferentes tamaños ya que son
independientes, lográndose con ello un incremento en la velocidad de procesamiento,
debido a que ambas informaciones pueden situarse en una posición en la memoria del
programa.
b. La simultaneidad en el acceso a instrucciones y datos, hace posible incrementar la
velocidad en la operación.
Una mínima desventaja en el diseño de este tipo de procesadores con esta
arquitectura, lo constituye el hecho de que, para tener acceso a tablas con valores
constantes para ser incluidos en programas específicos, es necesario contar con
instrucciones denominadas especiales, para obtener dicha información; el ejemplo clásico
es la información contenida en la EPROM.
Existen familias de microcontroladores que utilizan este tipo de arquitectura, que
pertenecen a la serie PIC 16C5X, 16CXX y 17CXX, que se caracterizan por tener 8 bits en
la memoria correspondiente a datos, además de 12, 14 y 16 bits en lo que corresponde a la
memoria de los programas, para las series 16C5X, 16CXX y 17CXX, respectivamente.
1.5.3. CISC
Esta forma de arquitectura tiene la característica, de utilizar todo un juego de
instrucciones complejas para procesar información, siendo su aplicación principal en
computadoras de uso general. Las características básicas, son.
a. Longitud con tamaño variable de sus instrucciones.
b. Cantidad mayor a ochenta instrucciones en el set.
c. Instrucciones potentes y sofisticadas, para actuar como macros.
d. Instrucciones con requerimiento de múltiplos para ciclo máquina.
e. Direccionamiento múltiple.
f. Para propósito general, número reducido para registros de trabajo.
En este tipo de diseño se evita lo que se denomina paralelismo que hay entre
instrucciones, actualmente los CISC que tienen alto rendimiento, utilizan una conversión a
1.5.4. RISC
RISC es la abreviatura de Reduced Instruction Set Computer, cuyo significado es:
Computadoras de set con instrucciones reducidas; siendo implementada con éxito en los
PIC, debido a las siguientes características:
a. Instrucciones reducidas menores a 120.
b. Solo cuatro modos de direccionamiento, es decir como el procesador utiliza la
memoria para la comunicación interna.
c. El chip procesador contiene generalmente 32 registros que son utilizados para
propósito general.
d. La ejecución de instrucciones se lleva a cabo en solo un ciclo de máquina, el cual
puede tener como máximo cuatro ciclos de reloj.
e. Las instrucciones tienen una longitud con tendencia a ser fijas y a la vez pequeñas,
oscilando entre 12 bits a 32 bits, con pocos formatos.
1.5.5. SISC
SISC es la abreviatura de Specific Instruction Set Computer, cuyo significado es:
computadora con instrucciones específicas; aquellos microcontroladores que se destinan a
una aplicación concreta, manejan pocas instrucciones que son puntuales para obtener un
resultado específico o predefinido.
1.6.Familias de PIC
La evolución constante, motivada por la demanda cada vez más acentuada de los
microcontroladores, así como el desarrollo de la tecnología en el diseño y elaboración de
estos dispositivos, ha hecho posible que se desarrollen las denominadas familias de
fabricantes de microcontroladores, entre las que destacan las siguientes:
Atmel, Hitachi, Intel de 8 y 16 bits, National Semiconductor, Microchip, Motorola
de 8, 16 y 32 bits, Texas Instruments y Zilog. Cada una de estas marcas han desarrollado
variedad de modelos, los cuales han evolucionado con el transcurrir del tiempo y la
tecnología, con la intención de mejorar su performance. A continuación, la descripción de
algunas de ellas.
En esta parte del trabajo de investigación, solo se va a hacer referencia a la familia
de microcontroladores PIC, fabricada por la empresa microchip. Los microcontroladores
PIC han desarrollado en el transcurso del tiempo, las denominadas familias, las cuales por
se inicia con Gamma enana, prosigue con baja, luego media y por último alta. Las
diferencias entre ellas son por la longitud de las instrucciones, número de funciones y
puertos, complejidad en el diseño interno, programación y cantidad de aplicaciones.
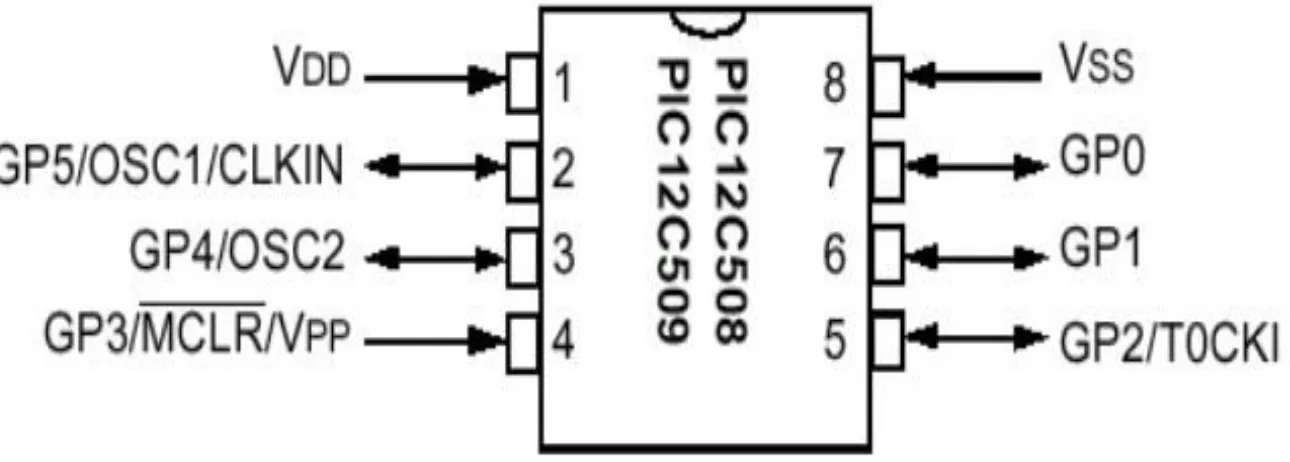
1.6.1. Gama enana
Son de tamaño físico reducido, por lo que tienen solo 8 pines externos. La tensión
de alimentación se encuentra en el rango de 2,5 VDC a 5,5 VDC, con frecuencia máxima
de 4 Mhz, con corriente de consumo menor a 2 mA. Soportan formatos de instrucciones
comprendidos entre 12 a 14 bits, siendo el total de las instrucciones a utilizar la cantidad de
33 a 35. La Figura 6, muestra la distribución de pines en este PIC.
De los ocho pines externos que tiene, seis pueden ser utilizados para señales de
entradas y salidas para el control de periféricos; también tiene en su diseño interior un
circuito oscilador RC. La Tabla 1 contiene características principales correspondientes a
esta familia de acuerdo a cada modelo en particular. Se observa también que hay
variaciones en la longitud de las instrucciones de acuerdo a cada modelo, que varían de 12
a 14 bits y algunos que tienen memoria Flash y EEPROM para los programas y datos
respectivamente.
Tabla 1
Características de los PIC Gamma enana
Modelo Mem. de
programa
Mem. de
datos Frecuencia
Líneas de E/S
ADC de
8 bits Temporizador
12C508 512x12 25x8 4MHz 6 --- TRM0+WDT
12C509 1024x12 41x8 4MHz 6 --- TRM0+WDT
12C670 512x14 80x8 4MHz 6 --- TRM0+WDT
12C671 1024x14 128x8 4MHz 6 2 TRM0+WDT
12C672 2048x14 128x8 4MHz 6 4 TRM0+WDT
12F680 512x12 FLASH
80x8 16x8
EEPROM 4MHz 6 4 TRM0+WDT
12F681 1024x14 FLASH
80x8 16x8
EEPROM 4MHz 6 4 TRM0+WDT
12C508 512x12 25x8 4MHz 6 --- TRM0+WDT
Nota: Elaborado por Villamil H. (2009)
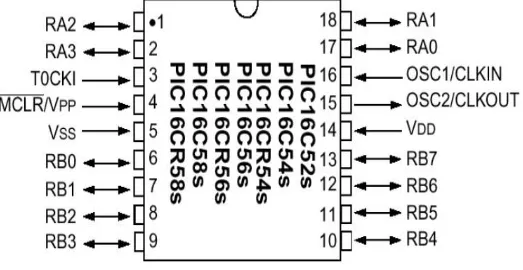
1.6.2. Gama baja
Son PICs diseñados con recursos bastante limitados pero que son económicos y
ofrecen prestaciones en aplicaciones de poca complejidad. Se han fabricado diversas
versiones, variando las conexiones externas de 18 a 28 pines, con voltajes de alimentación
comprendidos en el rango de 2,5 VDC a 5,5 VDC, con corriente menor a 2 mA, por lo
tanto, útil en aplicaciones con alimentación a pilas. El número de instrucciones llega a 33
con formato de 12 bits. La Figura 7, muestra la distribución de pines correspondiente.
Estos dispositivos han incorporado en su diseño, las etapas siguientes:
a. Sistema Power On Reset: para reiniciar el arranque del circuito.
b. Perro guardián (WDT): Vigilante de la ejecución.
c. Código de protección: Para grabar o no la información.
La Tabla 2, presenta las características principales.
Tabla 2
Características de los PIC Gamma Baja
Modelo Mem. de
programa
Mem. de
datos Frecuencia
Líneas
de E/S Temporizador Pines
16C52 384 25 bytes 4 MHz 12 TRM0+WDT 18
16C54 512 25 bytes 20 MHz 12 TRM0+WDT 18
16C55 512 24 bytes 20 MHz 20 TRM0+WDT 28
16C56 1K 25 bytes 20 MHz 12 TRM0+WDT 18
16C57 2K 72 bytes 20 MHz 20 TRM0+WDT 28
16C58A 2K 73 bytes 20 MHz 12 TRM0+WDT 18
Nota: Elaborado por Villamil H. (2009)
1.6.3. Gama media
Es una gama muy variada, que presenta modelos de tamaño diversos, con número
de pines que van desde los 18 hasta los 68, por lo que se puede controlar mayor cantidad
de periféricos al incrementarse la cantidad de puertos. Se adecúan fácilmente a
aplicaciones de mayor complejidad, con tan solo 35 instrucciones de programa. Algunas de
sus características son las que se mencionan:
a. Acceden a interrupciones
b. Tiene comparadores analógicos y convertidores A/D
c. Circuitos temporizadores y puertos seriales, etc.
d. Permite subrutinas anidadas.
La Figura 8 muestra el diagrama de pines de uno de estos PICs, en la que se
observa claramente que cuenta con cuatro puertos de entrada y salida, lo que mejora la
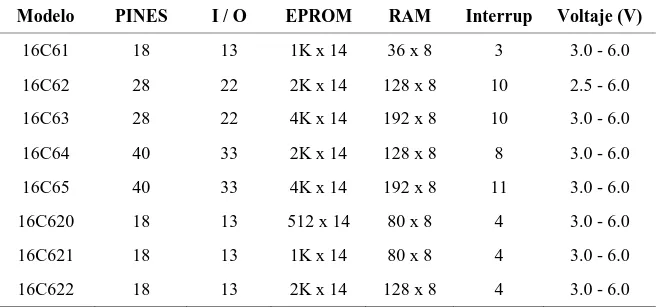
En la Tabla 3, Tabla 4 y Tabla 5, se presentan las principales características de
algunos de los modelos de esta familia.
Tabla 3
Características de los PIC Gamma media PIC 16C6XX
Modelo PINES I / O EPROM RAM Interrup Voltaje (V)
16C61 18 13 1K x 14 36 x 8 3 3.0 - 6.0
16C62 28 22 2K x 14 128 x 8 10 2.5 - 6.0
16C63 28 22 4K x 14 192 x 8 10 3.0 - 6.0
16C64 40 33 2K x 14 128 x 8 8 3.0 - 6.0
16C65 40 33 4K x 14 192 x 8 11 3.0 - 6.0
16C620 18 13 512 x 14 80 x 8 4 3.0 - 6.0
16C621 18 13 1K x 14 80 x 8 4 3.0 - 6.0
16C622 18 13 2K x 14 128 x 8 4 3.0 - 6.0
Nota: Elaborado por Villamil H. (2009)
Tabla 4
Características de los PIC Gamma media PIC 16C7X
Modelo PINES I / O EPROM RAM Interrup Canales A/D
16C70 18 13 512 x 14 36 x 8 4 4
16C71 18 13 1K x 14 36 x 8 4 4
16C72 28 22 2K x 14 128 x 8 8 5
16C73 28 22 4K x 14 192 x 8 11 5
16C74 40 33 4K x 14 192 x 8 12 8
Nota: Elaborado por Villamil H. (2009)
Tabla 5
Características de los PIC Gamma media PIC 16FXX
Nota: Elaborado por Villamil H. (2009)
1.6.4. Gama alta
Este es un modelo avanzado de diseño para microcontroladores, que contiene
variaciones muy significativas en lo que respecta a la longitud de las instrucciones que para
este caso es de 16 bits y la cantidad es de 58, pudiendo realizar aplicaciones de mayor
complejidad, también acepta interrupciones las cuales se encuentran gestionadas mediante
vectores, lo que demuestra su potencialidad. Se incluye también controladores para
periféricos variados, comunicación mediante puertos seriales y paralelos utilizando
elementos externos, el multiplicador para hardware que trabaja a gran velocidad y mayor
capacidad de memoria, alcanzando 8K palabras para la memoria de instrucciones y 454
bytes en memoria de datos.
Una característica destacable de estos componentes es la arquitectura abierta, que
posibilita el uso de elementos externos. Para ello los pines externos comunican los buses
Modelo
Mem. De
programa Memoria de
programa
Mem. de
datos Int. Líneas de E(S Temporizador
RAM EEPROM
16F83 36 64 512x14
FLASH 25 Bytes 4 13 TRMO+WDT
16C84 36 64 1K x 14
EEPROM 25 Bytes 4 13 TRMO+WDT
16F84 68 64 1K x 14
de datos, de direcciones y de control, conectando memorias y diversos controladores para
periféricos.
La Tabla 6, presenta características relevantes de estos modelos, que se usan en
determinadas aplicaciones puntuales.
Tabla 6
Características de los PIC Gamma alta
Modelo CAP PWM Multiplica hardware Mem. de programa Mem. de datos RAM Líneas
de E/S Temp. pines Modelo
17C42A 2 2 8X8 2KX16 232 33 4+WDT 18 17C42A
17C43 2 2 8X8 4KX16 454 33 4+WDT 18 17C43
17C44 2 2 8X8 8KX16 454 33 4+WDT 18 17C44
17C52 4 1 8X8 8KX16 454 50 4+WDT 18 17C52
17C56 4 1 8X8 16KX16 902 50 4+WDT 28 17C56
17C42A 2 2 8X8 2KX16 232 33 4+WDT 18 17C42A
Nota: Elaborado por Villamil H. (2009)
1.6.5. Gama mejorada
Tiene las siguientes características: 8 bits en los datos, 16 bits en las instrucciones,
número de instrucciones 77, velocidad de hasta 40 Mhz y 10 MIPS alto rendimiento,
Arquitectura para uso del lenguaje C, herramientas para emulación potentes.
En las Tablas 7 y 8, se presentan características muy relevantes para los
dispositivos de esta Gamma.
Tabla 7
Características de los PIC Gamma mejorada. PIC 18C XXX
Modelo
Memoria de programa EEPROM Data memoria
Bytes
RAM Bytes I/O Pines
Bytes OTP ROM
Words
18C242 16384 8192x16 - - 512 23
18C252 32768 16384x16 - - 1536 23
18C442 16384 8192x16 - - 512 34
Tabla 8
Características de los PIC Gamma mejorada. PIC 18F XXX
Modelo
Memoria de programa EEPROM Data memoria
Bytes
RAM Bytes I/O Pines
Bytes OTP ROM
Words
18F6620 65536 32768x16 - 1024 3840 52
18F8680 65536 32768x16 - 1024 3328 69
18F8720 131072 65536x16 - 1024 3840 68
Nota: Fuente http://edii.uclm.es/~miniesta/mc_pic_1.pdf
1.7.Etapas básicas
Según Parra L. (2012), el funcionamiento de los microcontroladores es de mayor
actividad que los microprocesadores, ya que en una sola unidad denominada chip se
encuentran contenidas varias etapas, con las que se realizan aplicaciones complejas
superiores a las que realizaría un microprocesador y varios circuitos adicionales. En el
diseño interior se concentran los siguientes bloques para cumplir con la función
encomendada:
La memoria de programación, que cumple con la función de almacenar programas
que serán ejecutadas en el micro; Memoria RAM, en la que se guardan datos en forma
temporal; Puertos de entrada y salida, en la que se conectan señales externas al dispositivo
con la finalidad de comunicación con otros elementos; también la generación del reloj
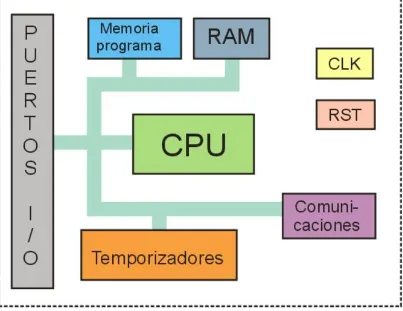
interno, temporizadores, etc. lo que se muestra en la figura 9. (pp. 24-25).
a. Unidad de Procesamiento Central (CPU)
Consta típicamente de un bus de 8 bits, aunque también hay de 4 bits, pero con el
desarrollo de la tecnología y los requerimientos cada vez mayores de velocidad y
memoria, se han desarrollado de 16, 32 e inclusive de 64 bits, la arquitectura puede ser
Harvard que contiene bus de datos y de instrucciones del programa; también puede
tener el diseño de Von Newman denominada también arquitectura Princeton,
conteniendo memoria, bus para datos, memoria y el bus de programa que son
compartidos).
b. Memoria de Programa
Contiene una memoria para solo lectura denominada ROM (de solo lectura), una
memoria que se programa denominada memoria EPROM (ROM programable) y
memoria de borrado y programable denominada EEPROM (ROM de borrado y
programación eléctrica), también memoria Flash, que se utiliza para almacenar el
código de programa que usualmente puede tener 1 kilobyte hasta muchos megabytes.
c. Memoria de Datos
Es aquella memoria de acceso aleatorio denominada RAM (Random Access Memory)
que es una memoria no volátil y que usualmente puede tener hasta 32 kilobytes de
capacidad de almacenamiento.
d. Generador de la señal de Reloj
Contiene un generador de pulsos constantes (generador astable) denominada clock, la
cual puede obtenerse de tres formas distintas, de acuerdo a la frecuencia y exactitud
requerida; con circuitos RC, cuando no se requiere mucha frecuencia ni exactitud; con
resonadores cerámicos, cuyo funcionamiento se asemeja a un cristal, pero de menos
precisión y con cristal, que se utiliza cuando se requiere mayor frecuencia y precisión.
La frecuencia de oscilación en general puede variar entre 1 a 40 MHz.
e. Interfaz de Entrada/Salida
Son los dispositivos por los cuales puede ingresar o salir información contenida en la
memoria del microcontrolador. Entre ellos se encuentran las EEPROM que son
memorias, los puertos que pueden ser seriales y paralelos, para la conexión de
interfaces, monitores para la visualización de información, los USB para intercambio de
información, los controladores de área de redes de trabajo y otros que cumplen con el
f. Convertidores A/D
Los convertidores Analógico-Digitales, son circuitos que convierten una señal de
entrada consistente en un nivel de voltaje que varía en forma constante a través del
tiempo, a la cual se le denomina señal analógica, en una señal que solamente contiene
dos estados de variación de voltaje, el cero lógico (0) y el uno lógico (1), que son
señales manipulables por el microcontrolador a través del programa.
g. Moduladores PWM
Son circuitos que son requeridos para la generación de señales de forma rectangular a
frecuencia fija, aunque el ancho del pulso es variable.
h. Temporizadores
Cumplen las siguientes funciones:
h.1. Temporización de entradas o captura: capturan o miden el tiempo de ocurrencia
ante eventos externos.
h.2. Salidas de señales temporizadas: se generan señales con temporización definidas.
h.3. Contador de eventos: conteo exacto de eventos efectuados externamente.
i. Salidas PWM
Generación de salidas con información mediante pulsos digitales.
j. Circuitos de vigilancia
Se les denomina Watchdog y protegen contra caídas en el sistema.
k. Controlador de interrupciones
Se administra que las tareas se ejecuten adecuadamente mediante interrupciones,
permitiendo efectuar multitareas.
l. Controladores DMA
Acceso a la memoria de otros dispositivos, independientemente del CPU.
1.8.Sistemas microcontrolados
Los microcontroladores representan el núcleo de todo un sistema controlado,
debido a sus características especiales de procesar diversas señales entrada/salida, también
procesar los datos velozmente, elegir decisiones al instante, inmunidad al ruido y bajo
consumo de energía, que lo han convertido a través del tiempo, en un componente muy
utilizado, versátil y de mayor venta actualmente. En la figura 10 se ha representado a todo
1.8.1. Dispositivos de entrada
Son todos aquellos dispositivos que ofrecen un cambio significativo de su estado
inicial, al estar afectos a una acción física o la percepción de un fenómeno, brindando
como respuesta la generación de señales que pueden ser utilizadas por el microcontrolador,
para la ejecución de operaciones de decisión o control. Los más comunes son:
a. Interruptores o Switching
b. Pulsadores
c. Teclados
d. Transductores
e. Sensores: Temperatura, presión, humedad, luz, etc.
En los elementos de contacto como el switch, teclado, pulsadores, lo que se
pretende es generar estados lógicos como el cero (0) y el uno (1), para lograr finalmente
una acción determinada. En lo que respecta a sensores y transductores, generan una señal
eléctrica al percibir un determinado fenómeno que, para ser admitidas por el
microcontrolador, tienen que ser convertidas a señal digital mediante convertidores A/D.
1.8.2.Dispositivos de salida
Son los encargados de recepcionar las señales procesadas por el microcontrolador y
otros dispositivos anexos y mostrar externamente el resultado mediante luces, imágenes,
sonido, caracteres, etc. Pueden ser: visuales, auditivos y actuadores.
a. Visuales
a.1. Diodos LED individuales
a.2. Diodos LED de siete segmentos
a.3. Diodos LED matricial
a.4. Lámparas incandescentes
a.5. Pantallas LCD (Cristal líquido), de 1x16 (1 línea, 16 caracteres), de 2x16 (2
líneas, 26 caracteres).
b. Audibles
b.1. Parlantes o bocinas
b.2. Zumbador (buzzer).
c. Actuadores
c.1. Relay: elemento electromecánico que acciona un interruptor mediante campo
magnético, utilizando una etapa denominada “driver” gobernada
generalmente por transistores.
c.2. Motores DC: que pueden ser continuos o de paso a paso, los cuales son
accionados con switchs o puentes H, para controlar el giro.
c.3. Motores AC: se activan mediante relays o componentes semiconductores
como los tiristores, triacs o relés electrónicos.
c.4. Electroválvulas: actúa como un interruptor para el paso de gases o líquidos
mediante acción electromagnética.
1.9.Herramientas de sistemas
Estas herramientas que forman parte del desarrollo de sistemas para utilizar los
microcontroladores, se encuentran relacionadas con un conjunto de interfaces y programas
que utilizan lenguajes de programación específicos a diferentes niveles. Algunas de estas
1.9.1. Ensamblador
Con este lenguaje se logra el desarrollo eficiente de programas, debido a que se
dirige directamente al sistema, utilizando muchas instrucciones, pero ocupando poca
memoria, Es un tanto difícil el dominio para el que se inicia en programación.
1.9.2. Compilador
Los compiladores son programas que convierten las instrucciones realizadas en
algún lenguaje de programación a lenguaje de máquina, es decir a un conjunto de códigos
en formato hexadecimal. La cantidad de códigos generados varían según el lenguaje
utilizado en la programación, por ejemplo, en lenguaje Assembler la cantidad de códigos
generados es menor a la de cualquier otro lenguaje utilizado, debido a que las instrucciones
van directamente al sistema, sin embargo, los otros lenguajes utilizan programas
intermedios para lograr menos instrucciones, pero generan mayor cantidad de códigos,
requiriendo mayor cantidad de memoria como desventaja.
1.9.3. Simulador
Los simuladores electrónicos son de mucha utilidad en la realización de proyectos
tecnológicos de diversa índole, ya que permiten visualizar la acción realizada por el
microcontrolador, de acuerdo a lo requerido en el diseño y efectuada mediante la
programación y compilado requerido.
1.9.4. Placas de evaluación
Son circuitos que contienen diversidad de componentes como microcontroladores,
pantalla LCD, display LED, teclados, relay, pines E/S, etc, los cuales pueden ser
interconectados por el operador según diseño en particular, con conexión a la PC para
cargar programas ejecutados por el microcontrolador.
1.9.5. Emuladores en circuito
El emulador es un instrumento el cual debe ser colocado entre la PC y la tarjeta que
contiene al circuito impreso con el microcontrolador, conectados mediante conectores
seriales. La ejecución del programa se realiza desde la PC, aunque para el circuito de
1.9.6. Programador
Es un circuito diseñado especialmente para grabar el programa conteniendo las
instrucciones en código hexadecimal en el interior del microcontrolador, el cual se lleva a
cabo mediante conexión a la PC previa instalación y configuración del circuito. También
existe otra forma de grabar la información mediante el uso del cargador de arranque, que
básicamente es un programa que se comunica con el microcontrolador por enlace serial
como el RS232, EEPROM, USB, bus CAN, etc
1.9.7. Paquetes IDE
IDE significa entornos de desarrollo integrado y es un paquete de varios softwares
específicos para microcontroladores que trabajan con Windows, permitiendo su fácil
acceso lo que lo hace versátil, cuenta además con editores de texto para efectuar
instrucciones y lograr el compilado posterior, que servirá de base para realizar la
simulación del circuito para verificar el funcionamiento de acuerdo a lo concebido en el
proyecto original. Algunos de estos softwares pertenecientes a IDE son el MPLAB, PBP,
Capítulo II
Diseño con Proteus VSM Versión 8.6
2.1. Aspectos generales
2.1.1. ¿Qué es el PROTEUS VSM?
Rossano V. (2013), definió a este software, como el sistema para diseñar circuitos
electrónicos mediante simulación análoga, digital y también mixta, brindando la
oportunidad de interactuar con la mayoría de componentes que forman parte de un circuito,
en las que se incluye a dispositivos que pueden ser animados con la finalidad de ver su
comportamiento a tiempo real, contando además con que generan y analizan señales.
Como complemento se tiene el módulo para diseñar circuitos impresos. (p. 14).
En el manual de laboratorio (2014), se definió al PROTEUS VSM, como el
software que permite simular el funcionamiento de circuitos con diseño electrónico, que
usan microcontroladores. En reconocimiento a las diversas prestaciones que ofrece, los
usuarios lo han convertido en un simulador muy popular. PIC. (p. 4).
De las definiciones anteriores y lecturas acerca de este tema, se define al
PROTEUS VSM como un software que contiene todo un sistema, cuyos elementos
constituyen la principal herramienta para diseñar y simular diversos y complejos circuitos
electrónicos, ya sean digitales o analógicos, aunque en algunos casos puede ser mixta,
incluyendo a los circuitos con PIC.
2.1.2. Elementos que contiene el PROTEUS VSM
La suite de PROTEUS VSM, comprende los siguientes elementos:
a. ISIS
Herramienta con la cual se puede elaborar complejos esquemas electrónicos,
incorporando para ello una librería surtida de aproximadamente 6000 diferentes
b. ARES
Herramienta utilizada para elaborar circuitos impresos, una vez realizado el
esquema en ISIS es posible generar automáticamente las pistas mediante la
posición automática de dispositivos y elementos. El tedioso trabajo del esquema
lo realiza la computadora, disminuyendo la fatiga del diseñador.
c. PROSPICE
Herramienta que permite simular el funcionamiento del circuito como si fuese
real, acorde al standard SPICE3F5, en circuitos analógicos, digitales y circuitos
mixtos, los cuales pueden contener microcontroladores.
d. VSM
Las siglas corresponden a Sistema de Modelamiento Virtual, siendo la
herramienta con la que se logra simular circuitos con microcontroladores de
diversas familias que priman en el mercado, como PIC, 8051, ARM/LPC200,
AVR, HC11 y BASIC STAMP.
La simulación comprende el uso de diversos dispositivos periféricos como los
display LCD, display LED, conectores RS232, teclados, memorias I2C y otros, lo
que realza la potencia de este software muy útil para el diseñador, por cuanto
permite la verificación del funcionamiento antes de la realización física del
mismo. (Manual de laboratorio, 2014, p. 4)
2.1.3.Características principales del PROTEUS
En resumen, las características más relevantes son:
a. Facilidad para el usuario de las herramientas que contiene ISIS, por lo tanto, amigable para el diseñador.
b. Facilita la simulación de circuitos simples y complejos, incluyendo aquellos que usan microcontroladores.
c. Se logra diseñar circuitos impresos ya sea en forma manual o también en forma automática.
d. Hace uso de interfaces estandarizados.
e. Compatibilidad garantizada con respecto al uso de herramientas que forman parte del entorno PROTEUS, por lo tanto, también la inter operatividad entre las
2.2. Instalación del programa
A continuación, se explicará en detalle los pasos a seguir, para realizar la
instalación del Software PROTEUS, versión 8.6.
a. Se selecciona la carpeta donde se encuentra el programa y al hacer doble click
aparecerá el icono, como puede verse en la figura N° 11.
b. Al hacer click derecho en el icono, se mostrará en pantalla el siguiente cuadro.
c. Al hacer click izquierdo en ejecutar como administrador, aparecerá en pantalla una
ventana indicando que se va a realizar cambios en la PC; hacer click en el recuadro
que indica Sí.
d. Aparecerá en pantalla el siguiente cuadro.
Figura 11. Icono que identifica al PROTEUS Fuente: Elaboración propia
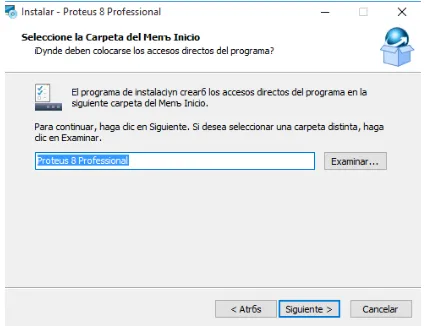
e. Hacer click en el recuadro que indica Siguiente. Aparecerá el siguiente cuadro.
f. Hacer click en el recuadro que indica Siguiente. Aparecerá el siguiente cuadro, en
el cual la barra de color verde indica la instalación de los archivos que se
encuentran dentro del programa.
Figura 13. Selección de carpeta que contiene el programa Fuente: Elaboración propia
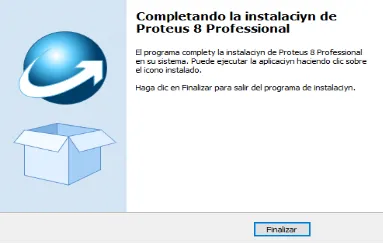
g. Al completarse la instalación de todos los archivos, aparecerá el siguiente cuadro,
que indica que se ha completado la instalación.
h. Hacer click en el recuadro que indica finalizar, para salir del programa de
instalación
i. Aparecerá en el escritorio, el icono de acceso directo al PROTEUS
Figura 15. Instalación de archivos del programa Fuente: Elaboración propia
Figura 16. Instalación completada Fuente: Elaboración propia
2.3. Creación de nuevo proyecto en ISIS
a. Al hacer doble click en el icono de acceso directo del PROTEUS, aparece el
siguiente cuadro. Si se desea empezar un nuevo proyecto, hacer click donde indica
la flecha.
b. Al seleccionar nuevo proyecto, se muestra el siguiente cuadro. Hay que colocar el
nombre del nuevo proyecto, pero manteniendo la extensión del archivo (.pdsprj).
También hay que colocar donde se va alojar el proyecto, haciendo click en browse
o por defecto ira a mis documentos.
Figura 18. Apertura de nuevo proyecto Fuente: Elaboración propia
c. Una vez que se ha colocado el nombre el nuevo proyecto, hacer click en el recuadro
que dice Next, aparecerá el siguiente cuadro. Aquí se pregunta si se va a crear un
esquema.
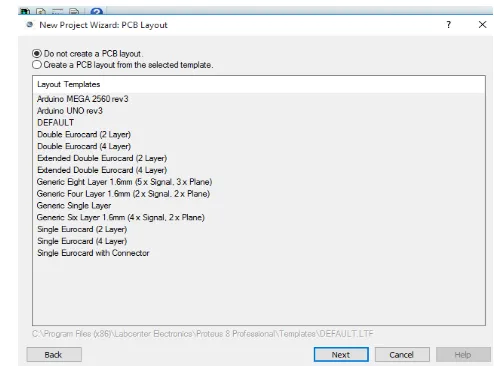
d. Al presionar Next, aparecerá el siguiente cuadro. Aquí se pregunta si se va a crear
el circuito impreso del esquema que se va a elaborar. Seleccionar el que más le
convenga
Figura 21. Seleccionar no crear circuito impreso Fuente: Elaboración propia
e. Si selecciona no crear circuito impreso, aparecerá el siguiente cuadro.
f. Al hacer click en Next, aparecerá el siguiente cuadro.
Figura 22. Componentes de circuito Fuente: Elaboración propia
g. Al hacer click en Next, aparecerá el siguiente cuadro.
h. Al hacer click en Next, aparecerá el siguiente cuadro, que es la pantalla principal.
Figura 25. Pantalla principal para esquematizar. Fuente: Elaboración propia
2.4. La interfaz de ISIS
Este programa tiene dos módulos bien definidos. El primero es ISIS, donde se dibujan los esquemas o diagramas electrónicos, efectuando además las simulaciones
virtuales para verificar el correcto funcionamiento del diseño. El segundo es ARES,
utilizado exclusivamente para diseño del circuito impreso.
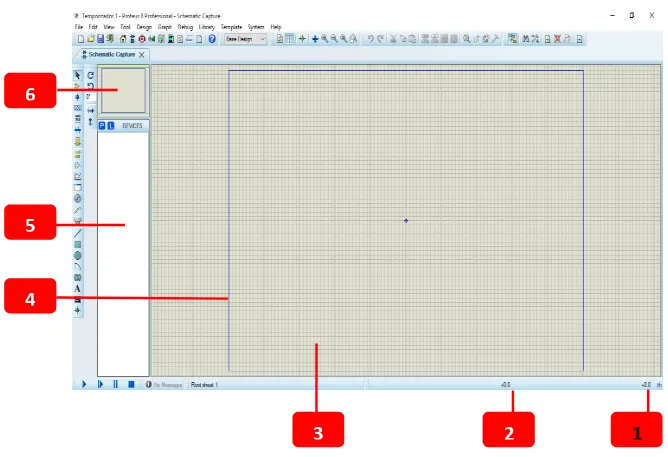
2.4.1. Distribución de la pantalla
La descripción de la distribución de la pantalla de interfaz de ISIS es la siguiente:
1. Barra de coordenadas
Se visualiza el lugar exacto de ubicación del cursor durante su desplazamiento por
ventana para la edición.
2. Barra de estado
Información del elemento seleccionado mediante el cursor en todo momento.
3. Ventana de edición
Lugar donde se dibujan los circuitos, ubicando los componentes, herramientas e
instrumentos, e interconectándolos convenientemente.
1
2
3
4
5
6
4. Borde de hoja
Es un espacio rectangular limitado por los cuatro costados con líneas azules, en cuyo
interior se realiza el circuito a realizar.
5. Selector de objetos
Es una pequeña ventana donde se encuentran listados los componentes y otros que han
sido seleccionados, para luego ser colocados en el orden que corresponda.
6. Ventana de vista previa
Pequeño espacio en la parte izquierda superior, en el cual se observa la forma del
circuito que está siendo diseñado.
2.4.2.La hoja de trabajo
Es el lugar donde se elabora el diseño del circuito a realizar y se encuentra
delimitada por líneas azules, siendo las medidas iniciales por defecto de 10 x 7 pulgadas,
las cuales se pueden modificar accediendo al menú y seleccionando System/Set Sheet
Sizes , luego se selecciona Sheet Size Configuration, apareciendo otra ventana mostrando
diferentes medidas para elegir una de ellas o acceder a un tamaño personalizado mediante
el USER.
2.4.3. La rejilla
Para la edición por defecto, el programa muestra una forma de malla o rejilla en
forma de pequeñas cuadriculas con líneas o puntos, que facilitan considerablemente la
realización de dibujos; la distancia por defecto entre puntos es una décima de pulgada, pero
se puede configurar con otra medida. Si el usuario desea prescindir de esta ayuda, entonces
procede a desactivarla.
2.5. Barra de herramientas 2.5.1.Clases
Con la finalidad de tener acceso a diversas funciones que ofrece el programa en
forma directa, se presentan siete barras con botones que se ubican en la posición que
muestra la figura.
Figura 28. La Rejilla. Fuente: Elaboración propia
La descripción de las clases de barras de herramientas, es la siguiente:
1. Modo
Permite la elección del modo de trabajo, seleccionando componentes y diversos
elementos que se necesitan para la elaboración propia del circuito, también la
incorporación de uno o varios instrumentos de medición, así como gráficos para la
simulación entre otros.
2. Opciones de archivo
Tiene similitud con Windows en cuanto a operaciones con archivos, creando nuevos,
abrir los existentes, diversas formas de guardar, etc.
3. Visualización
Los botones controlan como se desea ver el circuito durante la edición.
4. Edición
Opciones para la edición de elementos.
5. Herramientas de diseño
Opciones para diseñar utilizando varias hojas, generación de reportes, etc.
6. Simulación
Se controla la simulación con play, pausa, etc.
7. Rotación y reflexión
Cambio de posición física de componentes y elementos en el circuito.
2.5.2.Herramientas de Modo
La barra se particiona en tres: el botón superior muestra herramientas principales,
en el medio herramientas para acceso a dispositivos, y abajo, herramientas para dibujar en
2D.
Cuando se efectúa cambio de modo se producen ciertas modificaciones, como
cambio en el título en el seleccionador de objetos y la aparición de varios botones.
Para dibujos 2D se puede incluir al diseño del circuito, gráficos especiales como líneas,
flechas, marcos, textos indicativos, cuadros de texto, títulos, etc, también para dibujar
La descripción de cada uno de sus elementos, es la siguiente:
1. Selección
Herramienta para inclusión en la edición de cualquier objeto, herramienta o línea de
conexión.
2. Componente
Selección y colocación exclusiva de diversos componentes para la edición.
3. Puntos de unión
Es para la unión de puntos que de alguna forma se conectan, aunque su uso es poco
frecuente.
4. Notas de texto
Posibilidad para agregar texto en forma de nota en algún lugar del circuito.
5. Terminales
Ofrece variedad de terminales para ser usado en el diseño, se encuentra disponible en el
selector para objetos.
6. Línea
Exclusivo para usarse en elementos gráficos, colocando líneas rectas en el dibujo.
7. Cuadrado
Dibuja cuadrados.
8. Círculo
Dibujo de círculos.
9. Arco
Dibuja arcos de circunferencia.
10. Forma mixta
Se crean formas cerradas mixtas, que se encuentran compuestas de líneas curvas y
rectas. Para el trazo de una porción curva hay que presionar tecla CTRL.
11. Texto
En el diseño se coloca línea con texto.
12. Símbolos
Selecciona de una librería símbolos que han sido prediseñados.
13. Marcadores
Uso de marcadores que se encuentran en una lista y que se visualizan al hacer click del
mouse sobre la figura que lo representa.
2.5.3. Elegir componentes de las librerías
Para seleccionar los componentes, hay que estar en el modo Componente, para lo
cual, simplemente, presionaremos el botón Component Mode en la barra de herramientas
de Modo. Aparentemente no sucede nada al hacerlo, pero si observamos la ventana del
otro con una L. Además, a la derecha de ellos, en el título de la ventana del Selector de
objetos, se puede apreciar la palabra DEVICES, que significa dispositivos.
Si se presiona el botón P, se abrirá la ventana Pick Devices, donde se puede
navegar por las librerías de componentes, para elegir los que formarán el diseño requerido.
Desde esta ventana también es posible hacer una búsqueda concreta.
Figura 31. Elección de componentes Fuente: Elaboración propia
La descripción de cada uno de sus elementos, es la siguiente:
1. Show only parts with models
Significa mostrar solamente los componentes que tengan modelo, es decir, aquellos que
tienen la opción de simularse. Si se desactiva se obtendrán todos los componentes que
hay en la librería, inclusive aquellos que no están aptos para simularse.
2. Keywords
Representa el cuadro para buscar componentes en todas las librerías, se caracteriza por
la sensibilidad de búsqueda, o sea mientras se va escribiendo letras de la palabra en el
recuadro, van asomando ciertas coincidencias que pueden abreviar la búsqueda.
3. Match whole words
Al marcar la opción, hay que ingresar el nombre completo del componente para que sea
buscado.
4. Results
Muestra el listado completo de componentes por categorías, luego el nombre y el tipo
de librería al que pertenece con una descripción resumida, aunque en algunos casos se
presentan otras columnas de acuerdo a la categoría seleccionada.
5. PCB Preview
Aquí se observa el empaque que tiene el componente, lo que es de mucha utilidad
cuando se va a confeccionar el circuito impreso, ya que se tendrá las medidas exactas
del componente. También en algunos casos se muestra una serie de empaques cuando el
componente se fabrica con diferentes formas.
6. Schematic preview
Se muestra el símbolo del componente que se ha seleccionado.
7. Manufacturer
Representa un filtro de búsqueda teniendo en cuenta el nombre del fabricante.
8. Sub category
Muestra subcategorías del componente. Por ejemplo, al seleccionar Transistores se
tendrá como subcategoría, la variedad de tipos como bipolares, Mosfet, Jfet, etc.
9. Category
División de componentes por categorías.
Al realizar la búsqueda en Pick Devices, hay la posibilidad de encontrar
componentes que se requieren para hacer los circuitos, pudiendo ser elegidos de las
a. Se hace doble clic al componente seleccionado, entonces el nombre es mostrado en el
selector de objetos. Es posible seguir en la búsqueda de más componentes e irlos
agregando en la ventana que contiene al selector. Luego se cierra la ventana.
b. Hacer un clic al componente que se encuentra en la lista y luego presionar OK. El
componente pasa al Selector y se cierra la ventana.
2.5.4.Colocar un componente
Paso 1: Seleccionar el componente deseado en el Selector para objetos.
Paso 2: Colocar cursor del ratón o mouse en cualquier sitio en la ventana para edición; se puede observar cómo se convierte a lápiz color blanco.
Figura 33. Selección del componente Fuente: Elaboración propia