Localización de móviles en GSM
78
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electrónica y Telecomunicaciones. TRABAJO DE DIPLOMA LOCALIZACIÓN DE MÓVILES EN GSM Autor: Leonel del Risco Montero [email protected]. Tutor: MSc. Samuel Montejo Sánchez [email protected]. Santa Clara 2012 “Año 54 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicado sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “El día en el que el hombre se dé cuenta de sus profundas equivocaciones, se habrá acabado el progreso de la ciencia”. Charles Chaplin.
(5) ii. DEDICATORIA A mis padres porque son el motivo de inspiración de todos y cada uno de mis sueños. A mis abuelas y abuelos por darme tanto cariño, gracias por tanto amor. A mi hermanita, que para demostrarle todo el cariño y admiración que siento por ella no bastan las dedicatorias del mundo. A mis tías Nina y Xiomi por todo el apoyo que siempre me han brindado, por hacerme sentir como su hijo. A mis demás familiares por estar siempre a mi lado. A mis compañeros y amigos por brindarme su apoyo y ayuda en todos estos años..
(6) iii. AGRADECIMIENTOS A toda mi familia, en especial a mis padres, abuelos, hermana y tíos, por el amor, la dedicación, la confianza y el amor que siempre me han brindado. A mi tutor Samuel, por el apoyo, la exigencia y la confianza que brinda durante la confección del trabajo. A Dayana por estar a mi lado ayer, hoy, mañana y siempre. Por brindarme su amor y el que falta. ¿Te gustaría casarte conmigo? A mis inigualables compañeros de aula, que conocerlos ha sido una de las mejores cosas que me han sucedido en la vida. Dayana, Marisabel, Yanisleisy, Lisveysi, Alejandro, Yunier, Reinier, Iván y Ernesto por mencionar algunos. A mis profesores. Y a ti. A todos muchas gracias..
(7) TAREA TÉCNICA. iv. TAREA TÉCNICA Con el propósito de darle cumplimiento a los objetivos trazados para la realización de esta tesis, se tomaron en cuenta una serie de tareas técnicas de suma importancia para la confección del informe final, ellas fueron: 1. Revisión de la bibliografía relacionada con los diferentes sistemas de localización y los algoritmos más conocidos en la localización de móviles en GSM. 2.. Analizar. las. herramientas. computacionales. que. se. utilizarán. implementación. 3.. Implementar los diferentes algoritmos con la herramienta escogida.. 4.. Establecer los criterios de comparación adecuados.. 5. Comparar los algoritmos en base a los principales criterios de localización.. Firma del Autor. Firma del Tutor. para. la.
(8) RESUMEN. v. RESUMEN Las redes GSM, responden a satisfacer la necesidad de comunicación de múltiples usuarios. Diversos servicios de elevada relevancia social pueden ser ofrecidos, si se dispone de la información de localización asociada a los móviles. Esencial resulta la precisión de esta información para brindar alta calidad al servicio. Disímiles son los estudios realizados respecto al tema. Distintos autores han propuesto diversos métodos para estimar la localización de un móvil en una red GSM. Todas estas propuestas se centran en lograr la mayor exactitud posible durante la estimación de la ubicación del móvil, mediante la medición activa de factores como: el tiempo de arribo, el ángulo de llegada y la intensidad de la potencia recibida. En este trabajo se propone el diseño de un algoritmo de localización, basado en RSS y TOA, que permita estimar de forma precisa la ubicación de un móvil en una red GSM. Los resultados de las simulaciones realizadas muestran que el algoritmo diseñado presenta una mayor exactitud en la localización de la estación móvil que el algoritmo Lin destacándose el basado en ToA y que la propuesta basada en RSS reduce notablemente el número de estimaciones fallidas presentes en la propuesta de Lin..
(9) TABLA DE CONTENIDOS. vi. TABLA DE CONTENIDOS PENSAMIENTO................................................................................................................. i DEDICATORIA ................................................................................................................ ii AGRADECIMIENTOS ..................................................................................................... iii TAREA TÉCNICA ........................................................................................................... iv RESUMEN ........................................................................................................................ v INTRODUCCIÓN ............................................................................................................. 1 CAPÍTULO 1. 1.1. Comunicaciones celulares. .................................................................................. 4. 1.1.1 1.2. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM.4. Historia. ........................................................................................................ 4. GSM. .................................................................................................................. 6. 1.2.1. Arquitectura. ................................................................................................. 9. 1.2.2. Red de Acceso............................................................................................. 10. 1.2.3. Núcleo de Red. ............................................................................................ 11. 1.2.4. Especificaciones de GSM. ........................................................................... 12. 1.3. Localización de móviles en GSM. ..................................................................... 13. 1.3.1. Necesidad de la localización. ....................................................................... 13. 1.3.2. Técnicas existentes. ..................................................................................... 13. 1.4. Parámetros y conceptos básicos utilizados en la localización. ............................ 16. 1.4.1. Handover. ................................................................................................... 16. 1.4.2. Timing Advance. ......................................................................................... 17. 1.5. Modelos de propagación. .................................................................................. 17. 1.5.1. Modelo Okumura – Hata. ............................................................................ 18. 1.5.2. Modelo Lee. ................................................................................................ 18.
(10) TABLA DE CONTENIDOS. vii. 1.5.3. Modelo Walfisc – Ikegami. ......................................................................... 19. 1.5.4. Modelo Dos Rayos ...................................................................................... 19. 1.6. Conclusiones. .................................................................................................... 20. CAPÍTULO 2.. DISEÑO E IMPLEMENTACIÓN........................................................ 21. 2.1. Herramienta para la implementación ................................................................. 21. 2.2. Características de los sistemas de localización................................................... 21. 2.3. Implementación de los algoritmos de localización. ............................................ 22. 2.3.1. Descripción del algoritmo para RSS. ........................................................... 22. 2.3.2. Descripción del algoritmo para ToA. ........................................................... 31. 2.3.3. Descripción del algoritmo Lin para la comparación. .................................... 33. 2.4. Conclusiones del capítulo. ................................................................................. 33. CAPÍTULO 3. 3.1. COMPARACIÓN DE RESULTADOS. ............................................... 34. Comparación respecto al error de la estimación. ................................................ 34. 3.1.1. Comparación basada en el algoritmo de RSS. .............................................. 34. 3.1.2. Comparación basada en el algoritmo de ToA............................................... 48. 3.2. Conclusiones del capítulo. ................................................................................. 50. CONCLUSIONES Y RECOMENDACIONES ................................................................ 51 REFERENCIAS BIBLIOGRÁFICAS .............................................................................. 53 ANEXOS ......................................................................................................................... 55.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN Las comunicaciones celulares, entendidas como aquellas que liberan a sus usuarios de tener que estar en una posición fija y predeterminada para comunicarse, se han difundido más rápido que cualquier otra tecnología de comunicaciones en la historia. Nótese en este sentido cómo en las últimas décadas, estas pasaron de ser una tecnología al alcance de unos pocos a superar en número a las líneas de telefonía fija. En la actualidad, las nuevas tecnologías aplicadas a las comunicaciones celulares aparecen con una multiplicidad de nombres que cambian según la aplicación y el uso que se haga de ellas: Wi-Fi, WiMax, Bluetooth, ZigBee, GSM, Radiodifusión por satélite, entre una amplia diversidad de sistemas heterogéneos. Debido al constante auge que ha tenido en los últimos años la tecnología celular y sus aplicaciones, surge la necesidad de desarrollar servicios basados en localización para dar solución a una de las mayores preocupaciones en una red móvil, la seguridad asociada al móvil y al cliente. Existen diferentes soluciones para localizar la posición de un móvil y son de innegable aplicabilidad en servicios como: sistemas de llamada de emergencia, servicios médicos de urgencia, sistemas de rastreo de vehículos, sistemas antirrobos, guías de viaje, entre otros. Múltiples aplicaciones utilizan GPS (Global Position System) para la localización. El GPS establecido como sistema de posicionamiento global y presente en varios de los dispositivos móviles se ha convertido en una solución predominante. Esta propuesta presenta dos grandes inconvenientes. El primero asociado a la exactitud de la localización afectada directamente, por diversos factores como el efecto de ensombrecimiento en zonas de denso follaje o en ciudades debido a la presencia de construcciones de gran tamaño. El segundo producto a la necesidad de módulos GPS adicionales en los teléfonos móviles, lo que trae consigo baja escalabilidad producto a la imposibilidad de brindar el servicio a usuarios que no disponen de dispositivos GPS. Diversas soluciones se basan en la medición de los parámetros de la señal y estimación de la posición, y para algunos casos se ha abordado la integración de ambas técnicas..
(12) INTRODUCCIÓN. 2. En el contexto de una red GSM en la que el tráfico es básicamente voz, las células de reducido tamaño, denominadas microcélulas, con radios de cobertura de a lo sumo algunos centenares de metros, responden a la necesidad de satisfacer a una fuerte concentración de usuarios. Esencial resulta la exactitud y precisión de la información capturada en la localización para brindar calidad al servicio. De allí la importancia de establecer métodos que garanticen estimar la ubicación de forma precisa de un móvil en una red GSM. Disímiles son los estudios realizados respecto al tema. Distintos autores han propuesto diversos métodos para estimar la localización de un móvil en una red GSM. Todas estas propuestas se centran en lograr la mayor exactitud posible durante la estimación del móvil, mediante la observación activa de diversos factores como el tiempo de transmisión, las coordenadas de su ubicación y la intensidad de la potencia de transmisión. En este sentido se trazó el objetivo general de este trabajo y para darle cumplimiento perfilamos la investigación hacia el desarrollo de una serie de objetivos específicos. Objetivo General Diseñar un método que permita estimar de forma precisa la ubicación de un móvil en una red GSM. Objetivos específicos ·. Realizar un estudio del estado del arte de las tecnologías involucradas en la investigación.. ·. Diseñar y describir algoritmos eficientes para la ubicación de móviles, asistidos y no por GPS, en una red GSM.. ·. Implementar los algoritmos de ubicación del celular en una red GSM.. ·. Discutir los resultados obtenidos.. ·. Elaborar un informe con todos los elementos de la investigación.. El presente trabajo está estructurado en resumen, introducción, tres capítulos, conclusiones, recomendaciones, bibliografía, y anexos. En el primer capítulo se describen los fundamentos de la telefonía celular mediante un estudio teórico de sus antecedentes, principales características, funcionalidades y.
(13) INTRODUCCIÓN. 3. aplicaciones. En el segundo capítulo se describen los algoritmos de localización diseñados y se describe además el algoritmo implementado por Lin con el cual se establecerán comparaciones en el tercer capítulo. En el tercer capítulo se muestran los resultados de las simulaciones realizadas y la discusión de estos. En las conclusiones se destaca el cumplimiento de los objetivos trazados para esta investigación y las recomendaciones están perfiladas a enriquecer futuras investigaciones sobre el tema. El anexo recoge las funciones implementadas en la herramienta MatLab para el desarrollo de los algoritmos implementados en capítulos anteriores..
(14) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM 4. CAPÍTULO 1.. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM.. 1.1. Comunicaciones celulares.. En la actualidad, las nuevas tecnologías aplicadas a las comunicaciones celulares aparecen con una multiplicidad de nombres que cambian según la aplicación y el uso que se haga de ellas: Wi-Fi, WiMax, Bluetooth, ZigBee, GSM, Radiodifusión por satélite, entre una amplia diversidad de sistemas heterogéneos. 1.1.1 Antecedentes. Los orígenes de las comunicaciones celulares, se remontan a 1861 cuando Maxwell propuso una teoría matemática sobre el electromagnetismo en el King’s College de Londres. Estas fueron inicialmente concebidas en los laboratorios Bell en los estados Unidos por W. Rae Young y Douglas H. Ring en 1947. La idea se basaba en un sistemático e inteligente reúso del espectro disponible asignado al servicio, a través de miles de celdas con áreas de cobertura reducidas y desplegadas por todo el territorio (F.Molisch, 2011). El surgimiento del teléfono móvil data de los inicios de la Segunda Guerra Mundial debido a la necesidad imperante de comunicarse a distancia en el campo de batalla. Así surge un dispositivo creado por la compañía telefónica Motorola al cual denominó Handie Talkie H12-16. Con este dispositivo móvil se logró la comunicación con las tropas a través de ondas de radio a una frecuencia que no superaba los 600 KHz (Anderson, 2005). Ya creadas las bases de la telefonía celular se hizo necesario modernizar estos dispositivos, realizar innovaciones para mejorar la calidad de audio, disminuir el peso, y determinar el tipo de modulación. De allí surge lo que se conoce como las generaciones en la telefonía celular. En la década del setenta del siglo XX la AT&T (American Telephone and Telegraph) propone el sistema AMPS (Advanced Mobile Phone System). Este sistema fue el comienzo de la denominada primera generación de comunicaciones móviles (1G)..
(15) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 5. Limitaciones propiciaron en la década de los ochenta el lanzamiento del sistema GSM (Global System for Mobile Communication) y con él la segunda generación de comunicaciones móviles (2G) y posteriormente GPRS (General Packet Radio System) conocida como la generación 2.5 (2.5 G). UMTS (Universal Mobile Telecommunication System) es el sistema más importante de la denominada tercera generación de comunicaciones móviles (3G). La rápida evolución de la tecnología hace que los sistemas mencionados no sean estáticos y entre generación y generación aparezcan saltos evolutivos significativos como es el caso paradigmático en UMTS del HSDPA (High-Speed Downlink Packet Access) denominada generación 3.5 (3.5G). Actualmente y siguiendo una corriente evolutiva similar a las generaciones anteriores, la ITU-R (International Telecommunications Union Radio) está impulsando el IMT o cuarta Generación de Comunicaciones Móviles (4G). La evolución del teléfono móvil ha permitido disminuir su tamaño y peso, desde ese primer teléfono móvil en 1983 que pesaba 780 gramos, a los actuales más compactos y con mayores prestaciones de servicio. El desarrollo de baterías más pequeñas y de mayor duración, pantallas más nítidas y de colores, la incorporación de software más amigable, hacen del teléfono móvil un elemento muy apreciado en la vida moderna (Chacón and Pérez, 2002). La tendencia a la movilidad hace que cada vez sean más utilizados los sistemas inalámbricos. Las principales aplicaciones inalámbricas incluyen: telefonía móvil, comunicación inalámbrica de datos, comunicaciones móviles por satélites, GPS (Global Position System), dispositivos remotos infrarrojos, servicio de radio aficionado y aplicaciones militares (F.Molisch, 2011). En el presente trabajo nos centraremos en el estudio del estándar GSM perteneciente a la segunda generación de la telefonía móvil, y para ello se realizará una breve descripción de sus principales características para una mejor comprensión del algoritmo de localización a diseñar en el capítulo 2..
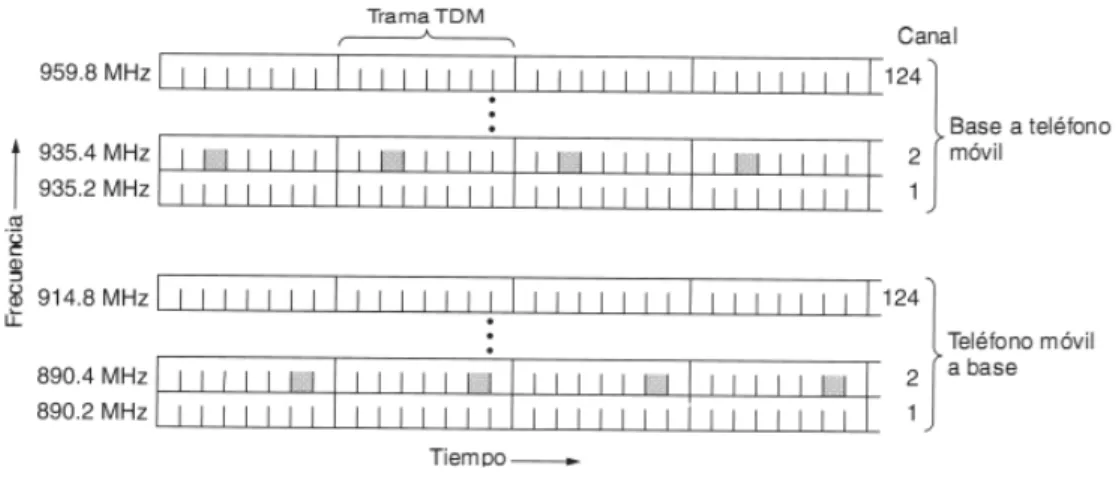
(16) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 1.2. 6. GSM.. GSM es el sistema digital de telefonía móvil más utilizado y un estándar de facto para los teléfonos móviles en Europa. Definido originalmente como estándar Europeo abierto para que una red digital de telefonía móvil soporte voz, datos, mensajes de texto y roaming en varios países. El GSM es uno de los estándares digitales inalámbricos 2G más importantes del mundo (Fernández and Fernández, 2004). Este sistema utiliza la multiplexación por división de frecuencia, en el que cada dispositivo móvil transmite en una frecuencia y recibe en una frecuencia mayor. Además, utiliza la multiplexación por división de tiempo para dividir un solo par de frecuencia en ranuras de tiempo compartidas por múltiples teléfonos móviles. Los canales GSM son de 200 kHz y almacenan ocho usuarios. A continuación se describirán brevemente algunas de las propiedades principales de GSM: Cada banda de frecuencia tiene una longitud de 200 kHz, como se muestra en la figura 1.1 (Tanenbaum, 2003). Un sistema GSM tiene 124 pares de canales simplex. Cada uno de ellos tiene una longitud de 200 kHz y maneja ocho conexiones por separado, mediante la multiplexación por división de tiempo. A cada estación activa se le asigna una ranura de tiempo en el par de canal. En teoría, en cada celda se pueden manejar hasta 992 canales, aunque muchos de ellos no están disponibles, para evitar conflictos de frecuencia con las celdas vecinas. En la figura 1.1 las ocho ranuras de tiempo sombreadas pertenecen a la misma conexión, pero en cada dirección hay sólo cuatro. La transmisión y la recepción no suceden en la misma ranura de tiempo porque los radios GSM no pueden transmitir y recibir al mismo tiempo, además de que toma algo de tiempo cambiar de una a otra..
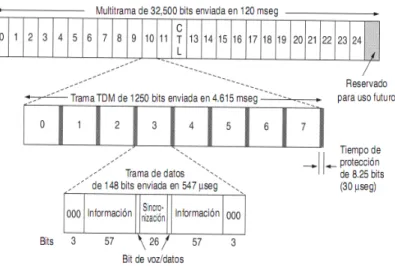
(17) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 7. Figura 1.1. GSM utiliza 124 canales de frecuencia, cada uno de los cuales utiliza un sistema TDM de ocho ranuras. Las ranuras TDM (Time Division Multiplex) que se muestran en la figura 1.1 son parte de una jerarquía compleja de entramado. Cada ranura TDM tiene una estructura específica, así como grupos de ranuras TDM de multitrama, que también tienen una estructura específica. En la figura 1.2 se muestra una versión simplificada de esta jerarquía. Observe que una ranura TDM consiste en tramas de datos de 148 bits que ocupan el canal por 577 μs (incluyendo un tiempo de protección o guarda de 30 μs después de cada ranura). Cada trama de datos inicia y termina con tres bits 0, para propósitos de delineación de trama. También contiene dos campos de información de 57 bits, cada uno de los cuales tiene un bit de control que indica si el siguiente campo de información es para voz o para datos. Entre los campos de información hay un campo de sincronización de 26 bits que es utilizado por el receptor para sincronizar los límites de la trama del emisor..
(18) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 8. Figura 1.2. Parte de la estructura de entramado GSM. Una trama de datos se transmite en 547 μs, pero un transmisor sólo tiene permitido enviar una trama de datos cada 4.615 ms, debido a que comparte el canal con otras siete estaciones. La tasa bruta de cada canal es de 270.833 bps, dividida entre ocho usuarios. La información adicional consume una fracción grande del ancho de banda, lo que finalmente deja 24.7 kbps de carga útil por usuario antes de la corrección de errores. Después de ésta, se dejan 13 kbps para voz, lo que da una calidad de voz sustancialmente aceptable con el costo de utilizar más ancho de banda. Cómo puede ver en la figura 1.2, ocho tramas de datos forman una trama TDM y 26 tramas TDM forman una multitrama de 120 ms. De las 26 tramas TDM de una multitrama, se utiliza la ranura 12 para el control y la 25 se reserva para uso futuro, de manera que sólo 24 tramas están disponibles para el tráfico del usuario. Sin embargo, además de la multitrama de 26 ranuras mostrado en la figura 1.2, también se utiliza una multitrama de 51 ranuras. Algunas de estas ranuras se utilizan para almacenar algunos canales de control utilizados para manejar el sistema. El canal de control de difusión es un flujo continuo de salida de la estación base que contiene la identidad de la estación base, así como el estado del canal. Todas las estaciones móviles supervisan su fuerza de señal para ver cuándo se han movido a una nueva celda. El canal dedicado de control se utiliza para actualización de localización, registro y establecimiento de llamada. En particular, cada estación base mantiene una base de datos.
(19) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 9. de las estaciones móviles actualmente bajo su jurisdicción. La información necesaria para mantener esta base de datos se envía en el canal dedicado de control. Por último, hay un canal de control común, que se divide en tres subcanales lógicos. El primero de estos subcanales es el canal de localización, que la estación base utiliza para anunciar llamadas entrantes. Cada estación móvil lo supervisa continuamente en busca de llamadas a las que debería responder. El segundo es el canal de acceso aleatorio, que permite que los usuarios soliciten una ranura del canal dedicado de control. Si dos peticiones chocan, se distorsionan y se tienen que volver a realizar más tarde. La estación puede establecer una llamada utilizando la ranura del canal dedicado de control. La ranura asignada es anunciada en el tercer subcanal, el canal de otorgamiento de acceso. 1.2.1 Arquitectura. Una red GSM está dividida fundamentalmente en tres subsistemas: NSS (Network Switching Subsystems), BSS (Base Station Subsystems) y NMS (Network Management Subsystems). En (Nokia, 2002) se encuentran descritos los componentes de la arquitectura GSM: ·. MS (Mobile Station o Estación Móvil): son teléfonos digitales que pueden estar acoplados a vehículos, pueden ser portables o incluso portátiles. Incluyen una tarjeta SIM (Subscriber Identify Module) que es la que le proporciona a la red la identificación del móvil y la información de servicio. A las estaciones móviles también se les conoce como terminales.. ·. NSS (Network Switch Subsystem o Subsistema de Conmutación y Red): es el encargado de conmutar entre las redes externas, como son el caso de las redes PSTN (Public Switched Telephony Network), PDN (Public Data Network), y redes GSM.. ·. BS (Base Station o Estaciones Base): es el conjunto de antenas dotadas de electrónica de red que brindan cobertura a las MS. El área geográfica de cobertura de cada estación base se denomina celda o célula.. ·. BTS (Base Transceiver System o Estación transmisora-receptora Base): está constituida por los módulos de radio y las antenas.. ·. BSC (Base Station Controller o Controlador de Estaciones Base): esta se basa en el control de potencia de terminales y estaciones base y de la asignación o reparto de.
(20) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 10. frecuencias. Gestiona las operaciones de radiofrecuencia de las BTS y la conecta a un único NSS. ·. BSS (Base Station System o Subsistema de Estaciones Base): no es más que el conjunto de BS y BSC. Sus principales componentes son BTS y BSC.. 1.2.2 Red de Acceso. La red de acceso permite la movilidad del usuario dentro del área de cobertura de la red y está constituida por el subsistema de estaciones base. Algunas de las características de una estación base determinan que puede alcanzar un radio de cobertura entre algunos cientos de metros en zonas urbanas y hasta un máximo práctico de 35 Km en zonas rurales, siempre teniendo en cuenta la topografía del entorno y su potencia. La cantidad máxima de usuarios que puede atender una BS viene dada por la limitación de ancho de banda, la cual está dividida en canales y es el BSC el que asigna a cada BS el ancho de banda. En cuanto a su potencia, estas tienen un máximo de 320 W, que comparada con la potencia de antenas de FM o de televisión es despreciable. Esta potencia no es mayor para evitar las interferencias con otras celdas lejanas que pudieran transmitir a la misma frecuencia, incluso, en zonas urbanas muy pobladas y en túneles se instalan muchas BSs con rango de potencia limitado, menor de 2.5 W, para la creación de microceldas que permiten una mejor reutilización de las frecuencias o para dar cobertura en lugares en los que una BS normal no alcanza o precisa de mayor capacidad (Weber et al., 1998). Por tanto, en zonas donde exista una gran concentración de usuarios, como grandes ciudades, debe instalarse un gran número de BSs de potencia muy limitada, y en zonas de menor densidad de uso, como áreas rurales, puede reducirse el número de estaciones y ampliar su potencia. Esto asegura además mayor duración de la batería de los terminales y menor uso de potencia de las estaciones base (Redl et al., 1995). Cuando el terminal no se encuentra emitiendo durante el transcurso de toda la llamada para ahorrar batería y permitir un uso más eficiente del espectro, se emplea el esquema de.
(21) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 11. transmisión TDMA (Time Division Multiple Access, o acceso múltiple por división del tiempo). El tiempo se divide en unidades básicas de 4,615 ms, y éstas a su vez en 8 time slots o ranuras de tiempo de 576,9 μs. Durante una llamada, se reserva el primer time slot para sincronización, enviada por la BS; transcurrido un tiempo, el terminal emplea un slot para enviar de terminal a BS y otro para recibir, y el resto quedan libres para el uso de otros usuarios en la misma BS y canal. Así se permite un buen aprovechamiento del espectro disponible y una duración de batería superior, al no usar el emisor del terminal constantemente sino sólo una fracción del tiempo (Weber et al., 1998). Al mismo tiempo, la comunicación no debe interrumpirse porque un usuario se desplace (roaming) y salga de la zona de cobertura de una BS, deliberadamente limitada para que funcione bien el sistema de celdas. Tanto el terminal del usuario como la BS calibran los niveles de potencia con que envían y reciben las señales e informan de ello al BSC. Normalmente varias estaciones base al mismo tiempo pueden recibir la señal de un terminal y medir su potencia. De este modo, el BSC puede detectar si el usuario va a salir de una celda y entrar en otra, y avisa a ambas MSCs (Mobile Switching Center) y al terminal para el proceso de salto de una BS a otra: este proceso se conoce como handover o traspaso entre celdas, una de las tres funciones del BSC (Khan, 2010). En ese caso el BSC remite al terminal a otra estación vecina, menos saturada, incluso aunque el terminal tenga que emitir con más potencia. Producto a esto es habitual percibir cortes de la comunicación en zonas donde hay muchos usuarios al mismo tiempo. Esto nos indica la segunda y tercera función del BSC, que son controlar la potencia y la frecuencia a la que emiten tanto los terminales como las BSs para evitar cortes con el menor gasto de batería posible (Weber et al., 1998).. 1.2.3 Núcleo de Red. Está constituido por el subsistema de conmutación, responsable del establecimiento de la trayectoria a través de la cual tiene lugar el intercambio de información. La MSC se encarga de iniciar, terminar y canalizar las llamadas a través del BSC y BS.
(22) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 12. correspondientes al abonado llamado. Es similar a una centralita telefónica de red fija, aunque como los usuarios pueden moverse dentro de la red realiza más actualizaciones en su base de datos interna (Nokia, 2002). Cada MSC está conectado a los BSCs de su área de influencia, y debe tener acceso a la interconexión con las redes de telefonía de otros operadores (Nokia, 2002).. 1.2.4 Especificaciones de GSM. Algunas de las especificaciones del sistema GSM son descritas a continuación: ·. Banda de frecuencia: Es el rango de frecuencia especificado por GSM y comprende desde 850 hasta 900 MHz y desde 1800 hasta 1900 MHz (de estación móvil a estación base).. ·. Distancia Dúplex: La distancia dúplex es de 80 MHz. Es la distancia entre las frecuencias de enlace descendente y las de enlace ascendente. Un canal tiene dos frecuencias espaciadas 80 MHz una de otra.. ·. Separación del Canal: Es la separación entre las frecuencias portadoras adyacentes de 200 KHz.. ·. Modulación: Es el proceso de envío de señal cambiando las características de la frecuencia portadora. En GSM esto se realiza a través de la GMSK o manipulación de desplazamiento mínimo gaussiano.. ·. Razón de transmisión: GSM es un sistema digital con una razón de transmisión por el aire de 270 Kbps.. ·. Método de acceso: GSM utiliza TDMA que es una técnica con la cual varias llamadas pueden usar la misma portadora. Cada llamada es asignada a un slot de tiempo particular.. ·. Codificador del habla: GSM usa Códigos LPC o de Predicción Lineal. El propósito de LPC es reducir la razón de bit. Los LPC proporcionan parámetros para un filtro que imita el tracto vocal. La señal atraviesa el filtro dejando residuos de señal. La voz es codificada a 13 Kbps..
(23) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 1.3. 13. Localización de móviles en GSM.. 1.3.1 Necesidad de la localización. En el contexto de una red GSM donde prevalece el tráfico de voz, las células de reducido tamaño, denominadas microcélulas, con radios de cobertura de a lo sumo algunos centenares de metros, responden a la necesidad de satisfacer a una fuerte concentración de usuarios. Esencial resulta la exactitud y precisión de la información capturada en la localización para brindar calidad al servicio. De allí la importancia de establecer métodos que garanticen estimar la ubicación de forma precisa de un móvil en una red GSM. Disímiles son las soluciones que se han basado en la medición de los parámetros de la señal y la estimación de la posición. La exactitud y precisión de la información durante la localización es importante para brindar calidad del servicio. De allí la importancia de establecer métodos que garanticen la ubicación de forma precisa de un celular en una red GSM (ANISETTI et al., 2008). Algunas de las técnicas de localización empleadas son: · Cell ID (Identificador de Celda). · ToA (Time of Arrive o Tiempo de Llegada). · AoA (Angle of Arrive o Ángulo de Llegada). · E-OTD (Enhaced Observed Time Difference o Estimación Mejorada de la Diferencia de Tiempo). · A-GPS (Assisted GPS o Sistema de Posicionamiento Global Asistido). · RSS (Received Signal Strength o Intensidad de Potencia Recibida). · Fingerprinting.. 1.3.2 Técnicas existentes. En la actualidad existen disímiles técnicas para estimar la ubicación de un móvil en GSM las cuales se describen a continuación: · Cell ID: Consiste en encontrar el ID de la celda donde se encuentra conectado un dispositivo móvil, cuya información nos puede orientar sobre la zona donde se.
(24) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 14. encuentra el usuario, la cual varía según la zona, urbana (entre 2 km y 20 km), y según el diámetro de la celda será la exactitud del método (Akgul and Pahlavan, 2009). Requiere que la red identifique la BTS en la cual se encuentra el dispositivo y la ubicación de éste. Si se está realizando una llamada la información de la celda se actualiza en tiempo real, en caso contrario la información será almacenada por la red en el HLR (Home Location Register); con el fin de mantener la información de ubicación actualizada la red realizará solicitudes periódicas al dispositivo con el fin de actualizar el Cell-ID (Akgul and Pahlavan, 2009). · Cell ID + TA (Timing Advance): Cada dispositivo dentro de una celda dada va a estar a una diferente distancia de la estación base, con el fin de mantener el sincronismo. En GSM los móviles y las estaciones base disponen de ciertos intervalos de tiempo para comunicarse y a medida que la distancia a la BTS aumenta, el dispositivo móvil envía cada ráfaga de datos antes del tiempo asignado, contrarrestando así el retardo introducido por el tiempo que le toma a la señal propagarse desde el móvil hasta la BTS. Esta información se puede usar para determinar la posición dentro de la celda con mayor exactitud (Calabrese et al., 2011). · Cell ID + Potencia de señal: Los móviles y las estaciones base intercambian información acerca del nivel de señal que el dispositivo recibe de la estación que le sirve. Usando modelos de pérdida de propagación puede determinarse la ubicación del dispositivo. · Tiempo de llegada (ToA): Es el tiempo que tarda en llegar la señal de una estación base a un dispositivo móvil. Para obtener su posición se necesitan al menos 3 torres para hacer una triangulación. Esta técnica presenta dificultades en zonas rurales donde es difícil encontrar las tres estaciones bases requeridas (Kos et al., 2006). · Ángulo de llegada (AoA): El AoA es definido como el ángulo entre la dirección de propagación de una onda incidente y alguna dirección de referencia, que es conocida como la orientación. La orientación es definida como una dirección fija contra la cual los AoA son medidos, es representada en grados en sentido de la dirección de las manecillas del reloj desde el Norte. Cuando la orientación es 0° o señalando al Norte, el AoA es el absoluto, de lo contrario, relativo. Un acercamiento común para la.
(25) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 15. obtención de mediciones de AoA debe usar una matriz de antena en cada nodo de sensor (Kos et al., 2006). ·. Diferencia de Tiempo. Observado Enriquecido (Enhanced Observed Time. Difference): En GSM, las mediciones de diferencia de tiempo son llamadas OTDs (diferencias de tiempo observadas). La resolución en la cual las mediciones del OTD son reportadas es solo 554 m y la sincronización requerida de las BSs no es garantizada. Estos problemas han sido solucionados en la técnica E-OTD (OTD Enriquecida). Un microteléfono con software modificado es capaz de reportar una estimación del OTD precisa por el uso de algoritmos sofisticados de procesamiento de señales, por ejemplo para el rechazo del multitrayecto, para encontrar la componente de señal que primero arriba. Estas mediciones del OTD son entonces enviadas a través de SMS (servicio de mensajes cortos) a un MLC (centro de localización móvil) que realiza los cálculos de la posición. La sincronización de las BS es lograda por la instalación de receptores similares como a la MS en localizaciones conocidas, típicamente en BS locales, para medir el timing advance entre las BS. Estas RTDs (diferencias de tiempo reales) son enviadas al MLC a través de SMS. Las desventajas de esta técnica son la necesidad de modificaciones del software para los microteléfonos y la necesidad de receptores adicionales. En el uso operacional, la transferencia de información tomará lugar usando mensajes específicos de señalización en lugar de SMS (Kos et al., 2006). ·. A-GPS: Está formado por una constelación de 24 satélites que orbitan alrededor de la tierra en 6 planos orbitales distintos con 4 satélites por plano de manera que en cualquier punto de la tierra haya entre 5 y 11 satélites visibles en un momento dado. Son necesarios 4 satélites para ubicar un objeto en 3 dimensiones con una precisión de hasta 3 m. Para sistemas móviles actuales el uso de GPS no es práctico debido a que los móviles deben estar equipados con sistemas GPS dentro del equipo (Kos et al., 2006).. ·. Intensidad de Señal Recibida (RSS): Esta técnica usa la atenuación de la señal recibida para inferir la localización del terminal móvil. Esta es una solución simple y barata. Las mediciones de potencia se pueden obtener en la mayoría de los.
(26) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 16. dispositivos móviles sin necesidad de un hardware adicional, a diferencia de los arreglos de antenas en una localización por AoA y de la sincronización necesaria en los transmisores para el caso de ToA. Atendiendo a la atenuación sufrida por la señal en su trayecto se puede estimar la distancia que separa al terminal móvil del punto de acceso. Sin embargo la relación distancia/potencia de señal recibida no es muy clara en interiores al haber multitrayecto, reflexiones, difracciones; por lo que se utilizan otros métodos para la localización que tienen en cuenta el entorno, como son la triangulación y el método de fingerprinter (Borges, 2010). ·. Fingerprinting: El fingerprinter es un método de localización que se basa en el comportamiento de la señal en ambientes. La atenuación debido al multitrayecto hace que la señal fluctúe alrededor de un valor medio para una posición dada. La señal recibida es usualmente modelada por una combinación de efectos a larga escala (large-scale) y efectos a pequeña escala (small-scale) (Nuño and Páez, 2006). La primera fase de este método se basa en la construcción de un mapa de potencia del entorno. El mapa de potencia se construye mediante un modelo de predicción de potencia o la lectura reiterada de la potencia en diferentes puntos físicos, de tal forma que se pueda caracterizar la potencia de la señal recibida desde cada AP (Access Point) en cada uno de los puntos escogidos. Con esta caracterización se construye una base de datos que permite distinguir la potencia de la señal para una posición en particular. En la segunda fase se realiza la estimación de la posición teniendo en cuenta una medida de potencia leída por el terminal móvil. La lectura del terminal móvil se trata de aproximar a uno de los puntos que se encuentran en la base de datos mediante la implementación de un algoritmo matemático (Nuño and Páez, 2006).. 1.4. Parámetros y conceptos básicos utilizados en la localización.. 1.4.1 Handover. En (F.Molisch, 2011) es descrito como el sistema utilizado con el objetivo de transferir el servicio de una estación base a otra cuando la calidad del enlace es insuficiente. Este mecanismo garantiza la realización del servicio cuando un móvil se traslada a lo largo de su.
(27) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 17. zona de cobertura. El mecanismo de handover es extremadamente importante en una red celular debido a que la arquitectura de red emplea un nivel de utilización de espectro máximo. Es el procedimiento que transfiere una llamada en curso de una celda a otra mientras el usuario se mueve a través del área de cobertura de su sistema celular. Con un uso eficiente del handover el rendimiento en la red celular mejora (Khan, 2010). Diferentes tipos de handover pueden ser caracterizados con respecto al cambio de región, que puede ser el cambio de una celda, o el área de una BSS o el área de una MSC. Estos tipos de handover son: intracell handover, intra-BSS handover, intra-MSC handover y el inter-MSC handover (Khan, 2010). 1.4.2 Timing Advance. Es el valor que corresponde a la longitud de tiempo que toma una señal para alcanzar la estación base desde el teléfono móvil. GSM usa tecnología TDMA en interfaces de radio para compartir una frecuencia entre varios usuarios, asignando ranuras de tiempo secuenciales a cada usuario que comparte la frecuencia. Cada usuario transmite periódicamente un tiempo determinado que es asignado a una de las ocho ranuras de tiempo en que se dividen. Dado que el usuario está a cierta distancia de la estación base y las ondas de radio viajan a la velocidad de la luz, el tiempo de arribo preciso dentro de la ranura puede ser usado por la estación base para determinar la distancia de un teléfono móvil. Es dada con unidades de período de bits con una exactitud de 550 m. El TA posee valores entre 0 y 63, donde 0 significa que la estación móvil se encuentra entre 0 y 550 m de la estación base (Spirito, 2001). GSM soporta rangos de celdas de hasta 30 km, de modo que el retardo de propagación entre BS y MS podría ser tan grande como 100 µs (F.Molisch, 2011), otros autores afirman que la celdas soportan rangos de hasta 35km (Medved, 2004). 1.5. Modelos de propagación.. Existen varios factores que afectan la transmisión de la señal como interferencia, ruido y atenuación. Para ello existen diferentes modelos de pérdidas, los cuales hay que tener en cuenta a la hora de realizar cualquier tipo de predicción de potencia recibida en función de las características del entorno. Algunos de estos modelos son descritos a continuación:.
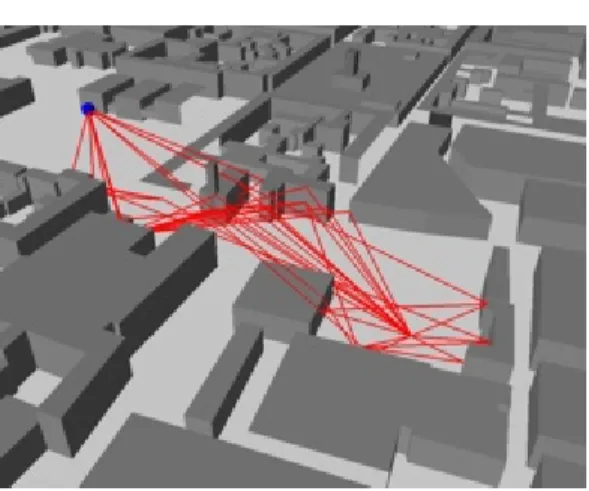
(28) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. ·. Modelo Okumura - Hata. ·. Modelo Lee. ·. Modelo Walfisch – Ikegami. ·. Modelo Dos Rayos. 18. Figura 1.4 Escenario de propágación donde se evidencian las pérdidas por múltiple trayecto. 1.5.1. Modelo Okumura – Hata.. Este modelo se basa en los datos de pérdidas por propagación de Okumura y es válido en las frecuencias de 150 MHz a 1500 MHz, pero se extrapola hasta los 3000 MHz, para una altura de la antena transmisora de 30 a 200 metros y de una altura para las antenas de las estaciones móviles de 1 a 10 metros. Se basa en las pérdidas por trayectoria en espacio libre y la atenuación de la señal la cual considera una zona urbana y una superficie casi suave. Los valores utilizados en la atenuación de la señal dependen de la distancia y de la frecuencia (Olivera and Alatriste, 2007). 1.5.2. Modelo Lee.. El modelo de predicción de pérdidas por trayectoria de Lee, es un modelo empírico diseñado por William C. Lee para macroceldas urbanas y suburbanas para obtener las características de propagación en la banda de UHF, este modelo es preciso ya que toma en cuenta parámetros como la densidad de árboles que existen en la zona, si se presenta propagación en el agua, la elevación del móvil respecto a la estación base, y sobretodo, considera la difracción y reflexión de la señal que se presenta cuando existe un obstáculo en.
(29) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 19. la trayectoria entre la estación base y el móvil. A este modelo también se le conoce como modelo punto a punto (Olivera and Alatriste, 2007). 1.5.3. Modelo Walfisc – Ikegami.. Este modelo es también conocido como modelo de pantallas de difracción. Se implementa para una distancia de entre 20 m y 5000 m entre el transmisor y el receptor. Las expresiones de propagación son derivadas de un modelo ideal, en el cual se considera una ciudad donde los edificios son agrupados en una hilera uniforme de acuerdo a su altura y su ancho (Olivera and Alatriste, 2007). Es válido cuando no existe línea de visión entre la estación base y el móvil. En algunos casos, la señal propagada de la antena transmisora a la receptora sufre múltiples difracciones después de pasar la hilera de edificios. Para el estudio de la señal recibida, las hileras de edificios son modeladas como un conjunto de pantallas de difracción y absorción, las cuales son responsables de las pérdidas de propagación debido a la cercanía a los edificios. Una parte de la señal transmitida que pasa por el techo del edificio que se encuentra antes de la ubicación del receptor es difractada hacia él, mientras la otra parte de esta señal se refleja en el edificio siguiente hasta llegar a la ubicación del receptor (Olivera and Alatriste, 2007). 1.5.4. Modelo Dos Rayos. El modelo de dos rayos es uno de los más sencillos que toma en cuenta las reflexiones del suelo. Se recibe la onda del suelo con un desfase Φ y un coeficiente de reflexión R. Las pérdidas son la suma del rayo directo con una reflexión directa..
(30) CAPÍTULO 1. FUNDAMENTOS DE LA LOCALIZACIÓN DE MÓVILES EN GSM. 20. Figura 1.5 Modelo de dos rayos 1.6. Conclusiones.. La tecnología móvil celular ha experimentado a lo largo de los años un proceso evolutivo caracterizado por el despliegue de diversas tecnologías que difieren en cuanto a su complejidad y escalabilidad. GSM representa el salto evolutivo entre la primera generación y la segunda y resulta atractiva para la mayoría de usuarios del mundo. En GSM, al igual que en el resto de las tecnologías resulta esencial la exactitud y precisión de la información capturada en la localización del móvil para brindar calidad al servicio al usuario..
(31) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. CAPÍTULO 2.. 21. DISEÑO E IMPLEMENTACIÓN.. En este capítulo se tratarán las distintas implementaciones de cada uno de los algoritmos, sus características más importantes y las necesidades del sistema de localización. Estas necesidades son los principales aspectos a tener en cuenta para establecer una comparación entre estos algoritmos. Además se expondrán las características. más. importantes del sistema de localización diseñado. Se utilizará la herramienta MatLab 7.10 (R2010a) para la implementación y la obtención de resultados comparativos debido a que esta ofrece una serie de ventajas y es una de las herramientas más utilizadas en aplicaciones afines. 2.1. Herramienta para la implementación.. MatLab (MATrix LABoratory) es una herramienta matemática con un entorno de desarrollo integrado (IDE) y con un propio lenguaje de programación (lenguaje M). Fue creado en el año 1984 por The MathWorks con la idea de emplear subrutinas escritas en Fortran para los cursos de álgebra lineal y análisis numérico, sin la necesidad de escribir programas en dicho lenguaje de programación. El lenguaje de programación M fue creado en el año 1970 para desarrollar un sencillo acceso al software de matrices LINPACK Y EISPACK sin tener que usar el lenguaje Fortran. MATLAB dispone de un código básico y de Toolboxes que son librerías especializadas que cubren las principales áreas en el mundo de la ingeniería y la simulación. 2.2. Características de los sistemas de localización.. Los sistemas de localización presentan diversas características debido a que los entornos son muy variables, lo que influye en que algunos entornos tengan características que predominen sobre otros a la hora de la localización. Después de determinada la configuración del sistema se deben tener en cuenta algunas características importantes a la hora de escoger un algoritmo de estimación de la posición (Nuño and Páez, 2006). Algunas de ellas son:.
(32) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. ·. 22. Precisión: está relacionada con el promedio de error en la distancia y la probabilidad de ocurrencia.. ·. Granularidad: está relacionada con la separación existente entre los puntos de calibración del mapa de potencia. Si estos puntos están muy cercanos, la lectura de potencia (RSS) es muy similar en puntos adyacentes y no se podrá distinguir muy bien cada uno. Si estos puntos se encuentran muy separados entonces se reduce muy drásticamente la precisión que pueda tener el algoritmo.. ·. Tiempo de cómputo: los algoritmos deben ser rápidos ya que pueden cargar al sistema si los tiempos de cómputo son relativamente grandes. Además, en algunas arquitecturas los MT son los que corren los algoritmos, y como estos trabajan con batería limitada, es necesario que sean lo más rápido posible para agotarla menos.. Estos son los parámetros principales para determinar el desempeño de los algoritmos de localización. 2.3. Implementación de los algoritmos de localización.. En el trabajo se desarrollan dos algoritmos de localización propios, los cuales se basan, uno en la técnica de localización RSS y el otro en la técnica de localización ToA, comparados mediante simulación en el capítulo 3 con un algoritmo realizado por Lin en (Lin et al., 2010). 2.3.1 Descripción del algoritmo para RSS. El objetivo de este algoritmo de localización es la obtención de una ubicación estimada del móvil con una gran exactitud basándose en la técnica de RSS. Para ello se inició primeramente la definición del escenario de simulación, para el cual se utilizó el sistema de coordenadas cartesianas. Para la realización de dicho escenario se supuso un área de “x” estaciones bases y se consideró además que la estación móvil siempre se encuentra dentro del área de cobertura de tres de ellas, por lo que el escenario de simulación cuenta de tres estaciones bases, las cuales se enumeran de izquierda a derecha y de arriba hacia abajo, y están distanciadas equitativamente a 48 km una de otra con un radio de cobertura de 35 km (ver figura 2.1)..
(33) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 23. Figura 2.1. Escenario de simulación, tres estaciones base con su centro y radio de cobertura. Para la simulación del trayecto se implementó una función denominada trayr.m (ver Anexo I). ·. Función trayr.m.. Objetivo: Dicha función es la encargada de generar la posición real o posiciones de la estación móvil y de darle movimiento en el caso que lo lleve. Para el caso en que la estación móvil se encuentra estacionaria solamente generamos N posiciones aleatorias del móvil dentro del escenario. Para el caso en que el trayecto sea lineal pero a pie, se toman mediciones cada un minuto. Se especificó que el usuario móvil se traslada a una velocidad constante de 3.6 km/h, con un ángulo de 45° de izquierda a derecha en un área definida dentro del escenario. Con estos datos se generan las posiciones de la estación móvil empleando las siguientes ecuaciones:.
(34) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. = donde. =. y. 24. ∗ ∗ cos ∅. (2.1). ∗ ∗ sin ∅. (2.2). son los desplazamientos en el eje x y en el eje y respectivamente,. es la. velocidad de la estación móvil, es el tiempo de medición del sistema de localización (considerado igual a un minuto) y. es el ángulo de la trayectoria.. Se toma la posición inicial del móvil y a partir de las siguientes fórmulas se determina la nueva posición del móvil: =. donde. y. =. (. ). (. ). + +. son las coordenadas de la posición actual del móvil,. (2.3) (2.4) y. son las. coordenadas iniciales del móvil. Para el caso en que el trayecto sea lineal pero en auto, se toman también mediciones cada un minuto, se especificó que el usuario móvil se desplaza a una velocidad constante de 90 Km/h con un ángulo de 45°. Con estos datos se generan la posición de la estación móvil a través del empleo de las ecuaciones (2.1) y (2.2) y se determina la nueva posición del móvil a través de las fórmulas (2.3) y (2.4). Ahora bien, para el caso en que el trayecto sea aleatorio pero a pie, se toman mediciones cada un minuto, se especifica que el usuario móvil se desplaza a una velocidad constante de 3.6 Km/h con un ángulo generado aleatoriamente. Con estos datos se generan las posiciones de la estación móvil empleando las ecuaciones (2.1), (2.2), (2.3) y (2.4), además de la siguiente ecuación:. donde. =2∗. ∗. (2.5). es el ángulo de la trayectoria aleatoria, que puede tomar valores entre 0o y 360o y. rand es una función del MatLab que genera valores aleatorios entre 0 y 1..
(35) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 25. Para el caso en que el trayecto sea aleatorio pero en automóvil, se realizan también mediciones cada un minuto, se especifica que el usuario móvil se desplaza a una velocidad constante de 90 Km/h con un ángulo aleatorio. Con dichos datos se generan las posiciones de la estación móvil empleando las ecuaciones (2.1), (2.2), (2.3), (2.4) y (2.5). Siguiendo con el algoritmo de localización se determina la distancia existente entre la estación móvil y cada una de las tres estaciones base a través de:. donde. =. (. ) −(. −. −. (2.6). ). es la distancia desde el móvil a cada estación base, [. ,. ] son las coordenadas. de la estación móvil y [ , ] son las coordenadas de las estaciones base, con ·. Función OkumuraHata.m (ver Anexo II).. = 1, 2. 3.. Objetivo: Para la generación del modelo de pérdida de propagación, se utilizó el modelo de pérdidas de Okumura – Hata por ser uno de los más empleados en el mundo (ver epígrafe 1.4.3), donde se inicializan variables como la frecuencia de portadora ( ), la altura de la estación. base (ℎ ), altura de la estación móvil ( ℎ ), distancia entre la estación móvil y cada una de. las tres estaciones base ( ), phi ( ) y la variable el caso de la frecuencia de portadora de. = 900. August 1980) las alturas están en el orden 30. la distancia calculada en (2.6),. puede ser. phi tomará valores de 0, 1, 3, 5 y 10 dB. Para el caso en que. es. , las cuales pueden tomar valores, para. ≤ ℎ ≤ 200 ,. = 1800 y1 ,. ; según (Hata, ≤ℎ ,. ≤ 10 ; ,. es ,. , se utiliza para determinar las pérdidas de. propagación (Lp) la siguiente expresión: = 69.55 + 26.16 ∗ log( ) − 13.82 ∗ log(ℎ ) −. + (44.9 − 6.55 ∗ log(ℎ )) ∗ log. (2.7). y para la determinación del factor de corrección para la altura de la antena de la unidad móvil ( ), según (Hata, August 1980), la ecuación viene dada por:.
(36) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. = (1.1 ∗ log( ) − 0.7) ∗ ℎ − (1.56 ∗ log( ) − 0.8). Para el caso en que. con. (2.8). (Lp) se determina a través de (2.7) y el factor de. ≤ 300. corrección para. con. es. 26. = 8.29 ∗ (log(1.54 ∗ ℎ )) − 1.1. (2.9). = 3.2 ∗ log(11.75 ∗ ℎ ) − 4.97. (2.10). =3. ; y para cuando. =3. .. > 300. Para cuando city es definida como suburban las pérdidas (Lp) se determinan como: =. − 2 ∗ log. 28. − 5.4. (2.11). donde Lpsm es las pérdidas en city small y médium vista en (2.7). Para el caso en que city es rural las pérdidas Lp se determinan como: =. − 4.78 ∗ (log(. )) + 18.33 ∗ log( ) − 40.94. A las pérdidas de propagación les adicionamos un factor de sombra (Shadowing). (2.12). el cual. está definido como: =. donde. (0, ). (2.13). es una función de MatLab que genera números aleatorios siguiendo una. distribución normal, en el presente caso con media 0 y desviación estándar .. ·. Función CalcularDistancia.m (ver Anexo III).. Objetivo: Con esta función se calcula la distancia estimada (. ) entre la estación móvil y las. estaciones base, considerando el error que introduce el factor de sombra..
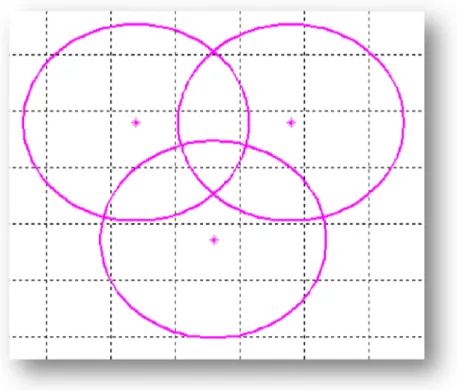
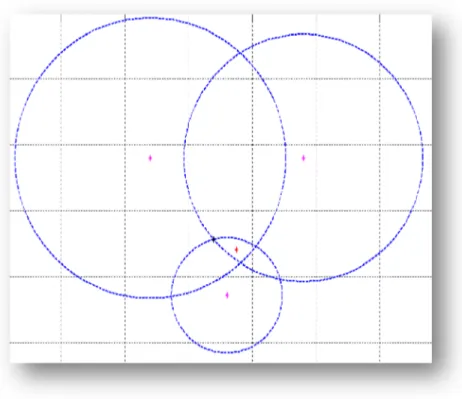
(37) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. Para 150. ≤ = 10. y para 1500. ≤ 1500. (. .. <. .. ∗. la distancia (. ( ). .. ≤ 2000. ∗. (. ). 27. ) se determina: ) /(. .. .. ∗. (. )). (2.14). se aplica el la extensión al modelo Hata para ese. rango de frecuencia y se determina como: = 10. (. .. . ∗. ( ). .. ∗. (. ). ) /(. .. .. ∗. (. )). (2.15). Debido a la diferencia entre las distancias reales ( ) y las distancias estimadas (. ) es. necesaria la implementación de un método de localización que permita la ubicación lo más precisa posible. ·. Función location.m (ver anexo IV).. Objetivo: Para el algoritmo implementado se definen cuatro casos posibles. · Primer caso: Cuando las tres circunferencias imaginarias con centro en las estaciones base y radios. se cortan entre ellas generando 6 puntos (ver figura 2.2)..
(38) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 28. Figura 2.2. Primer caso para la localización. El algoritmo propuesto, para este primer caso, necesita de la ubicación de tres puntos para estimar la ubicación. Para la determinación de estos puntos de intersección, el algoritmo primeramente busca los dos puntos de intersección entre las estaciones 1 y 2 y determina cuál de ellos es el más cercano al radio imaginario de la estación base 3 y ese es el primer punto de intersección. Para determinar el segundo punto, se ubican los puntos de intersección entre las estaciones base 1 y 3 y se realiza el mismo procedimiento anteriormente descrito. El tercer punto se determina entre las estaciones base 2 y 3 realizando el mismo procedimiento. Una vez determinados los puntos de localización se realiza un promedio de los tres puntos y se asume que la estación móvil se encuentra en esa posición estimada, que está representada en la figura 2.2 como “ * ”..
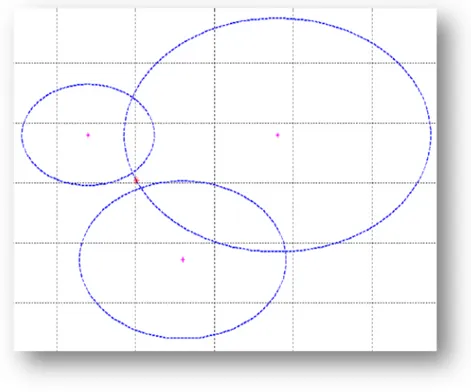
(39) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 29. · Segundo caso: Cuando se cortan las circunferencias imaginarias según las siguientes opciones 1 con 2, 2 con 3, y 1 con 3 no se cortan, o cuando se cortan 1 con 2, 1 con 3 y 2 con 3 no se cortan o cuando se cortan 1 con 3, 2 con 3 y 1 con 2 no se cortan.. Figura 2.3. Segundo caso para la localización. El algoritmo propuesto para el segundo caso necesita de la localización de dos puntos para la estimación de la posición. Se buscan los puntos de intersección de dos de las estaciones base que se cortan, se determina igualmente cual es el más cercano al radio de la que no se corta y ese es el primer punto. Para determinar el segundo punto se buscan los puntos de las otras dos estaciones base que se cortan y se ubica el más cercano a la estación que no se corta con ellos y ese es el segundo punto. Una vez ubicados ambos puntos, se determina el promedio de estos y ese promedio es la localización estimada del móvil para este caso, el cual se representa en la figura anterior como “ * ”..
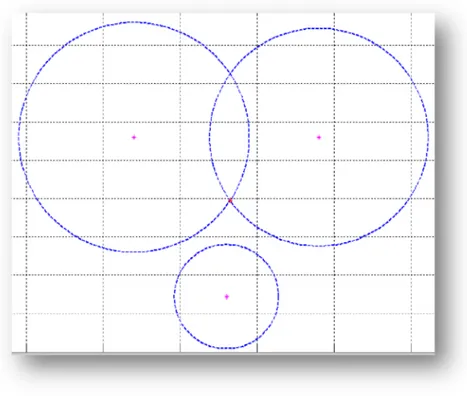
(40) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 30. · Tercer caso: Cuando se cortan entre sí sólo dos circunferencias y una no corta a ninguna de las otras dos.. Figura 2.4. Tercer caso para la localización. En el tercer caso, al cortarse sólo dos estaciones base, se determinan solamente dos puntos de intersección, por lo que la localización estimada del móvil es el más cercano al radio de la que no se corta. Se representa como “ * ” en la figura 2.4. · Cuarto caso: Cuando ninguna de las circunferencias se cortan entre ellas..
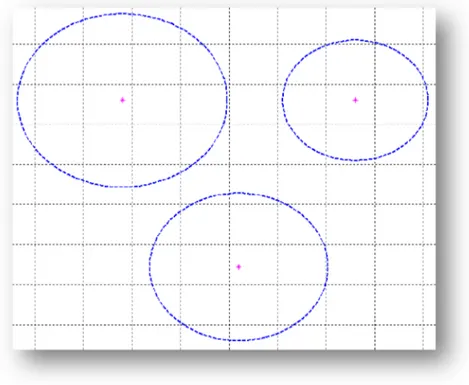
(41) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 31. Figura 2.5. Cuarto caso para la localización. En el cuarto caso, al no cortarse ninguna de las estaciones base, se determina esa medición como no válida y se solicita una nueva medición. Este caso es un evento imposible para el algoritmo de localización Propio. De este modo se realiza la localización estimada de una estación móvil basada en la técnica de localización RSS. 2.3.2 Descripción del algoritmo para ToA. En este epígrafe se realizará un algoritmo para la estimación de la posición basados en la técnica ToA. El escenario de simulación es el mismo que para RSS, ver epígrafe anterior. Para la simulación del trayecto real, el cual puede ser en estado estacionario, en movimiento a pie, tanto lineal como aleatorio, y en movimiento en auto, tanto lineal como aleatorio, se implementó la función trayr.m (ver Anexo I), explicada en el epígrafe anterior..
(42) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 32. Después de determinar la trayectoria real del móvil y las distancias de este a cada estación base, se determinan los tiempos que demoran cada estación base en detectar al móvil a través de la ecuación: (2.16). = donde. es la distancia real del móvil a la estación base , es la estación base a la que le. realizamos los cálculos, aproximadamente, y. es la velocidad de propagación, que es la velocidad de la luz. es el tiempo que demora la estación base en detectar al móvil.. Teniendo dicho tiempo, se calcula el tiempo estimado a través de la fórmula:. donde. =. es el estimado y. la función. +. (2.17). es un número simulado aleatoriamente en MatLab siguiendo. (0, ) donde. es la raíz cuadrada de la varianza y la varianza según. (Patwari et al., July 2005) se determina como: = donde. 8∗. ∗. 1. ∗. (2.18) ∗. ∗. es el ancho de banda de la señal con valor 200. portadora con valores de. segundos con valor de 577. = 900 y. o. = 1800. ,. ,. es la frecuencia de la. es la duración de la señal en. es la relación señal a ruido con valor de 9. Con el tiempo estimado se determina la distancia estimada. .. del móvil a cada estación. base a través de la fórmula: =. ∗. (2.19). Determinadas las posiciones estimadas, se implementa el algoritmo de localización descrito en el epígrafe anterior (location.m) y con este se determina la localización estimada de la estación móvil para esta técnica..
(43) CAPÍTULO 2. DISEÑO E IMPLEMENTACIÓN. 33. 2.3.3 Descripción del algoritmo Lin para la comparación. Para hacer justa la comparación se implementó el mismo escenario que para los epígrafes anteriores, con las mismas condiciones que para. RSS, variando el algoritmo de. localización, utilizando el propuesto por Lin en (Lin et al., 2010). ·. Función locationLin.m (ver Anexo V).. Objetivo: Para este algoritmo de localización los autores en (Lin et al., 2010) describen dos casos posibles para que su algoritmo estime la posición del móvil. Estos son: · Primer caso: Cuando las tres circunferencias imaginarias de cobertura con centro en las estaciones base y radios. se cortan entre ellas generando 6 puntos (ver figura 2.2).. Para el primer caso el algoritmo de localización determina cuál de las estaciones base recibe la señal del móvil más próximo a ella, por lo que de los seis puntos de intersección que se forman inicialmente se quedan con los cuatros puntos que incluyen a dicha estación base. Después determinan cual es la segunda estación que recibe al móvil más cerca, y toman los dos puntos de esta con la que lo recibió más próximo, y para finalizar escogen el punto de los dos que está más cercano al radio imaginario de la que lo recibe más lejos y allí estiman que se encuentra el móvil. Se representa en la figura 2.2 como “ * ”. · Segundo caso: Cualquiera de los demás posibles casos que no incluyen el caso anterior, (ver figuras 2.3, figura 2.4 y figura 2.5). Para el segundo caso estas mediciones son no válidas y se solicita una nueva medición. Este caso sería un evento imposible para este algoritmo de localización. 2.4. Conclusiones del capítulo.. El algoritmo de localización Propio implementado basado en las técnicas de posicionamiento RSS, y ToA, es un novedoso método para la localización de móviles en redes GSM, y sus resultados se validarán mediante la comparación con el algoritmo de localización basado en RSS propuesto por Lin en (Lin et al., 2010)..
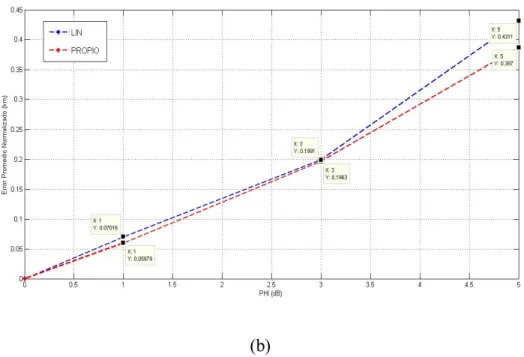
(44) CAPÍTULO 3. COMPARACIÓN DE RESULTADOS. CAPÍTULO 3.. 34. COMPARACIÓN DE RESULTADOS.. Una propuesta económica y viable para comprobar el desempeño y la exactitud de los algoritmos de localización de una estación móvil es la utilización de simuladores. Con el objetivo de comparar los resultados del algoritmo de localización diseñado se desarrollaron algoritmos de simulación con el empleo del MatLab 7.10.0. En este capítulo se realizarán las simulaciones del algoritmo implementado en el capítulo 2 y se realizarán comparaciones con el algoritmo propuesto por (Lin et al., 2010) en cuanto al error de la estimación y cantidad de casos imposibles. 3.1. Comparación respecto al error de la estimación.. 3.1.1 Comparación basada en el algoritmo de RSS. En este epígrafe se mostrarán los resultados de la simulación para el algoritmo basado en RSS en cuanto a error medio normalizado respecto al radio de cobertura de las estaciones base vs phi y casos imposibles vs phi, donde Phi [dB] representa la desviación típica de la componente de efecto de sombra. En la figura 3.1 se pueden apreciar los resultados de la simulación en cuanto a error medio normalizado vs phi para frecuencias de portadora de f = 900 MHz y f = 1800 MHz y una. trayectoria aleatoria con movimiento a pie.. (a).
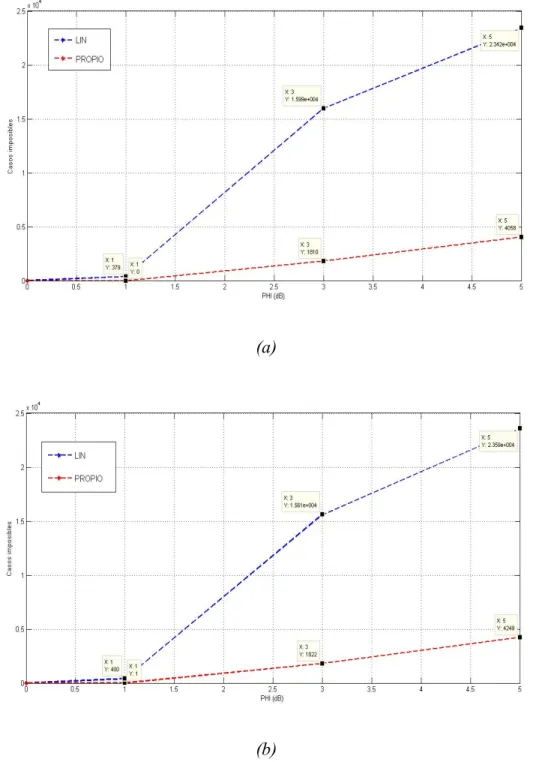
(45) CAPÍTULO 3. COMPARACIÓN DE RESULTADOS. 35. (b) Figura 3.1. Error promedio normalizado respecto al radio vs phi para el trayecto aleatorio a pie para (a) fc = 900 MHz y (b) fc = 1800 MHz. En esta figura se pueden apreciar que, tanto para fc = 900 MHz como para fc = 1800 MHz, ambos algoritmos presentan resultados similares, e incluso para un valor de phi de 3 dB, los resultados son casi idénticos. Se evidencia también que a medida que phi aumenta el algoritmo Propio presenta un mejor comportamiento que el propuesto por Lin. Esta simulación se realizó para 48000 iteraciones. En la figura 3.2 se aprecian los resultados de la simulación en cuanto a casos imposibles vs phi, también para frecuencias de portadora f = 900 MHz y f = 1800 MHz y una. trayectoria aleatoria con movimiento a pie..
(46) CAPÍTULO 3. COMPARACIÓN DE RESULTADOS. 36. (a). (b) Figura 3.2. Casos imposibles vs phi para el trayecto aleatorio a pie para (a) fc = 900 MHz y (b) fc = 1800 MHz. En esta figura se puede apreciar que, tanto para fc = 900 MHz como para fc = 1800 MHz, a medida que phi aumenta los casos imposibles (estimación no válida debido a las mediciones) también aumentan para ambos algoritmos, hasta phi = 1 dB son relativamente.
(47) CAPÍTULO 3. COMPARACIÓN DE RESULTADOS. 37. similares los comportamientos, pero para valores superiores de phi se evidencia el deterioro del algoritmo Lin con un 49.1% de casos imposibles para phi = 5dB mientras nuestra propuesta basada en RSS sólo presenta un 8.85%. Esta simulación también se realizó para 48000 iteraciones. En la figura 3.3 se pueden apreciar los resultados de la simulación en cuanto a error medio normalizado respecto al radio de cobertura vs phi para una frecuencia de portadora = 900. = 1800. con una trayectoria lineal y un movimiento a pie.. (a).
Figure
+7
Documento similar