Demodulación de señales de AM empleando el sistema de sonido de la PC
70
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Centro de Estudios de Electrónica y Tecnologías de la Información. TRABAJO DE DIPLOMA Título: Demodulación de señales de AM empleando el sistema de sonido de la PC. Autor: Dayren Gil Casas Tutor: Dr.CT. Carlos Ferrer. Santa Clara 2013 “Año 55 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Informática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) Pensamiento 1.
(5) Teoría es cuando se sabe todo y nada funciona; práctica, cuando todo funciona y nadie sabe por qué. Anónimo. 2.
(6) Dedicatoria 3.
(7) A mis padres, por su confianza y apoyo incondicional. A mi hermano Bayron, por ser un pilar fundamental en el desarrollo de este trabajo. A mis abuelos, por estar siempre presentes.. 4.
(8) Agradecimientos 5.
(9) A mis padres, por todo su sacrificio. A mis hermanos Bayron y Aslan. A mis abuelos. A Amarilys por ser un apoyo en momentos vitales. A mi tutor, Dr.C Carlos Ferrer Riesgo. Al profesor Dr.C Miguel A. Mendoza. A Pablo Marín y Julio Cesar Negrin por su ayuda. A familiares y amigos. A todo aquel, que de una forma u otra contribuyó al desarrollo y confección de este trabajo. A todos, muchas gracias.. 6.
(10) Resumen 7.
(11) Resumen La creciente disponibilidad de las PC, así como cada vez la mayor capacidad de cómputo de éstas, nos lleva a una búsqueda para aumentar sus prestaciones. La adquisición, procesamiento y visualización de señales a través de la PC cada vez recibe más interés. Una alternativa barata y cómoda es el empleo de la tarjeta de sonido para adquirir las señales, aprovechando las ventajas de la misma, como lo es el poseer convertidores análogos digitales y digito analógicos. El empleo de Instrumentos Virtuales (VI) para confeccionar sistemas capaces de procesar datos en la PC, mediante el uso de tarjetas externas o internas, es cada vez mayor. La mayor limitación del sistema de sonido viene dado por el ancho de banda de frecuencias que tiene la tarjeta de sonido, que no permite obtener señales de bajas frecuencias, como son muchas señales biomédicas. Una solución a este problema es la modulación, adquisición y posterior demodulación de las señales de entrada. En el presente trabajo se construyó un sistema capaz de recuperar una señal modulada, logrando la adquisición, visualización y salva de la señal.. 8.
(12) Índice 9.
(13) Índice INTRODUCCIÓN .......................................................................................................................... 14 CAPÍTULO 1. GENERALIDADES DE VI’S, PC’S Y AM ..................................................................... 18. 1.1. SISTEMAS DE ADQUISICIÓN DE SEÑALES .............................................................................................18. 1.2. INSTRUMENTACIÓN VIRTUAL ...........................................................................................................19. 1.2.1. Conceptos, ventajas y desventajas del uso de la PC .......................................................20. 1.2.2. Sistemas Comerciales .....................................................................................................21. 1.3. SISTEMA DE SONIDO DE LA PC .........................................................................................................22. 1.3.1. Aspectos del Hardware ...................................................................................................22. 1.3.2. Aspectos de Software .....................................................................................................24. 1.3.3. Algunos ejemplos ...........................................................................................................26. 1.4. DEMODULACIÓN...........................................................................................................................27. 1.4.1. Detector de Envolvente ..................................................................................................27. 1.4.2. Detector Coherente ........................................................................................................28. 1.4.3. Detector Coherente en Cuadratura ................................................................................29. 1.5. CONCLUSIONES DEL CAPÍTULO .........................................................................................................31. CAPÍTULO 2 2.1. PROGRAMACIÓN DEL VI ...................................................................................... 33. PROGRAMACIÓN EN LABVIEW .........................................................................................................33. 2.1.1. Adquisición de la señal. ..................................................................................................33. 2.1.2. Proceso de Demodulación ..............................................................................................34. 2.1.2.1. Detector de Envolvente ......................................................................................................34. 2.1.2.2. Detector Coherente ............................................................................................................35. 2.1.3. Interfaz Usuario-VI .........................................................................................................36. 2.1.3.1. Interfaz para Detector de Envolvente I ...............................................................................36. 2.1.3.2. Interfaz para Detector de Envolvente II ..............................................................................38. 10.
(14) 2.2. 2.1.3.3. Interfaz para Detector de Envolvente III .............................................................................39. 2.1.3.4. Interfaz para el Detector Coherente ...................................................................................40. PROGRAMACIÓN CON DELPHI..........................................................................................................41. 2.2.1. Adquisición de la Señal ...................................................................................................41. 2.2.2. Proceso de Demodulación ..............................................................................................44. 2.2.2.1. Filtrado y obtención de la Transformada de Hilbert ...........................................................45. 2.2.2.2. Demodulación .....................................................................................................................45. 2.2.2.3. Generación y Sincronismo de Portadora ............................................................................45. 2.2.3 2.3. Interfaz de Usuario .........................................................................................................46. MEDICIÓN DE LA DISTORSIÓN DE LA SEÑAL DEMODULADA .....................................................................46. 2.3.1. Medición de diferencias..................................................................................................47. 2.3.2. Medidas de correlación ..................................................................................................47. 2.3.3. Medidas de Distorsión Espectral. Distorsión Total de Armónicos (THD) ........................47. 2.4. CONCLUSIONES DEL CAPÍTULO .........................................................................................................48. CAPÍTULO 3 3.1. RESULTADOS........................................................................................................ 50. RESULTADOS EN LABVIEW .............................................................................................................50. 3.1.1. Pruebas al Detector de Envolvente I ...............................................................................50. 3.1.2. Pruebas al Detector de Envolvente II ..............................................................................51. 3.1.3. Prueba al Detector de Envolvente III ..............................................................................52. 3.1.4. Pruebas al Detector Coherente .......................................................................................53. 3.2. RESULTADOS EN DELPHI .................................................................................................................53. 3.2.1. Funcionalidad .................................................................................................................53. 3.2.2. Evaluación Cuantitativa..................................................................................................54. CONCLUSIONES ......................................................................................................................... 58 RECOMENDACIONES ................................................................................................................ 60. 11.
(15) REFERENCIAS BIBLIOGRÁFICAS ........................................................................................... 62 ANEXOS........................................................................................................................................ 64 DETECTOR DE ENVOLVENTE I................................................................................................ 64 DETECTOR DE ENVOLVENTE II............................................................................................... 65 DETECTOR DE ENVOLVENTE III ............................................................................................. 66 DETECTOR COHERENTE .......................................................................................................... 67. 12.
(16) Introducción 13.
(17) Introducción El incremento de las Computadoras Personales (PC’s), en hogares, centros de trabajo, áreas académicas y centros de investigación, así como nuestra cada vez mayor dependencia de éstas, incentiva el interés en aumentar sus prestaciones. La adquisición, procesamiento y visualización de señales a través de la PC es una propuesta cada vez más atractiva, flexible y barata. Una de las alternativas para ello es utilizar la tarjeta de sonido de la PC ya que posee circuitos Convertidor Dígito-Analógico (DAC por sus siglas en inglés Digital to Analog-Converter) y Convertidor Análogo-Digital (ADC), con frecuencias de muestreo y rangos de voltajes de entrada adecuados para múltiples aplicaciones de no muy altos requerimientos. A esto se suma la simplicidad de uso, estandarización, y soporte siempre actualizado para múltiples sistemas operativos de los drivers de sonido para las PCs, lo que facilita el desarrollo de aplicaciones y su mantenimiento. A pesar de las ventajas que posee la tarjeta de sonido en la adquisición señales, su principal limitación viene dada por su ancho de banda, que no permite la adquisición de señales con frecuencias por debajo de la decena de Hz. Una alternativa a esta limitación es someter a dicha señal de baja frecuencia a un proceso de modulación para trasladarla a frecuencias que pueden adquirirse, y recuperar posteriormente la señal original mediante el proceso inverso (la demodulación). La modulación y demodulación de amplitud en señales de baja frecuencia es una técnica que viene siendo utilizada desde hace algunos años, con el objetivo de transmitir información de cierto medio a otro con la menor pérdida posible. Esta técnica es mayormente utilizada en ambientes o condiciones de trabajo donde la señal que nos interesa no se puede transmitir o adquirir en su forma original, como en nuestro caso, donde estamos limitados por las especificaciones de la tarjeta de sonido. Por otro lado el empleo de Instrumentos Virtuales (VI) para la adquisición, procesamiento y visualización de señales es cada vez mayor, debido a las grandes ventajas que estos brindan, como son la flexibilidad de la interfaz de 14.
(18) usuario, la flexibilidad del procesamiento y otros. En este trabajo se desarrolla un VI que permite adquirir, demodular y visualizar la señal de interés, que haya sido modulada en un sistema exterior a la PC. Se emplean dos plataformas diferentes de desarrollo, LabView y Delphi. LabVIEW es un programa que te permite crear instrumentos virtuales (VI’s) a partir de subVI’s propios del programa o creados por el programador, con un ambiente gráfico y una interfaz de usuario lo suficientemente cómoda como para convertirlo en un instrumento de programación atractivo para los desarrolladores de VI’s. La programación es gráfica, o sea a partir de bloques gráficos ya programados, lo que brinda cierta ventaja sobre la programación en códigos. Cuenta con una series de subVI’s o VI’s internos que permiten el procesamiento de señales de forma digital o analógica, así como herramientas para probar los instrumentos de forma simulada. Permite la comunicación o interconexión del VI desarrollado con diferentes dispositivos de la PC para la transmisión y recepción de datos. También permite la creación de una aplicación desde el VI creado. Delphi es un lenguaje de programación que permite crear programas capaces de resolver disimiles problemas, con una compatibilidad absoluta con el sistema operativo Windows, aunque recientes versiones (Delphi 10) presentan además compatibilidad con Linux y Mac. Dispone de una paleta dotada de una gran variedad de componentes, algo así como los bloques de construcción de cada programa. Esta paleta es denominada Borland VCL (Visual Component Library), o biblioteca de componentes visuales. Posee un aspecto similar a Visual Basic. A diferencia de otras herramientas de desarrollo visuales (Visual Basic, Toolbook, etc.) con Delphi es posible crear nuevos componentes que pueden incorporarse en la paleta con los ya existentes y ser utilizados de la misma forma. La VCL puede estructurarse libremente y así adaptarse a las situaciones propias de programación. Entre las características por las cuales resulta atractivo el Delphi para su empleo en la programación del nuestro VI puede ser la presencia de componente de trabajo a bajo nivel con audio de Windows 15.
(19) (desarrollado en el CEETI), así como la existencia del TChart, un componente para la visualización de gráficos de todo tipo. El objetivo general de ese proyecto es desarrollar un VI capaz de adquirir y demodular señales de AM provenientes de la tarjeta de sonido de la PC. Para ello se trazaron los siguientes objetivos específicos: . Selección de métodos de demodulación a emplear.. . Desarrollar un VI capaz de adquirir, demodular, visualizar y salvar las señales.. . Evaluar los resultados.. Se plantea como hipótesis la posibilidad de recuperar en tiempo real la envolvente de una señal modulada en amplitud adquirida a través del sistema de sonido de la PC. Como aporte fundamental, este proyecto da solución a la necesidad de contar con un sistema de adquisición de señales de baja frecuencia, como pueden ser señales biomédicas, industriales y otras de interés, que resulte económico, sencillo, flexible y fácil de utilizar. A la vez, permite un mejor aprovechamiento de las PCs aumentando las potencialidades de su tarjeta de sonido.. Estructura del informe Este informe cuenta con 3 capítulos. En el capítulo 1 se hace referencia a toda la teoría que involucra el sistema de adquisición de señales, la instrumentación virtual y la demodulación de señales AM (amplitud modulada). En el Capítulo 2 se describe la programación de los VI’s, en los lenguajes seleccionados (LabView y Delphi). En el Capítulo 3 se exponen los resultados obtenidos en las pruebas realizadas a cada uno de los VI’s, en la comprobación de su correcto funcionamiento. Finalmente se incluyen las conclusiones y recomendaciones. 16.
(20) Capítulo 1 17.
(21) CAPÍTULO 1 GENERALIDADES DE VI’S, PC’S Y AM En este capítulo se hace énfasis en los principales conceptos y antecedentes para el desarrollo del sistema que se aborda.. 1.1 Sistemas de adquisición de señales La adquisición de señales consiste en tomar un conjunto de variables mensurables en forma física y transformarlas en tensiones eléctricas, de forma tal que puedan ser procesadas y/o almacenadas por un dispositivo determinado [1]. Si tenemos en cuenta que la mayoría de las señales analógicas pueden tomar cualquier valor dentro de un rango determinado, entonces se requiere una etapa de acondicionamiento que adapte la señal a niveles compatibles con el elemento encargado de la conversión digital (el DAC). Ya digitalizadas la señales analógicas, instrumentos programados para aplicaciones específicas las pueden procesar, visualizar y almacenar [2]. El proceso descrito anteriormente se puede apreciar en la figura 1.1:. Fig. 1.1 Diagrama general de un sistema de adquisición.. En la actualidad es cada vez más común el empleo de la PC para la adquisición de señales, debido a la considerable reducción de los costos, así como las facilidades de procesamiento que alcanzan los microprocesadores actuales, y la posibilidad de gráficar las señales en la pantalla y/o almacenarlas en el disco duro, etc.. 18.
(22) De la misma manera que se toma una señal eléctrica y se transforma en una digital dentro del ordenador, se puede tomar una señal digital o binaria y convertirla en una analógica [1] a través del ADC, permitiendo la confección de sistemas dependientes de dichas señales digitales. La señal dentro de la memoria de la PC la puede generar un programa orientado a la aplicación que se desea y luego de procesada ser recibida por mecanismos que ejecuten movimientos mecánicos, a través de servomecanismos, o modificar variables físicas a través de transductores. Los elementos de interfaz internos o externos al PC que permiten la comunicación entre este último y el medio, constituyen los elementos de hardware para el diseño de instrumentos virtuales. La flexibilidad de procesamiento, posibilidad de realizar las tareas en tiempo real o en análisis posteriores, gran capacidad de almacenamiento, rápido acceso a la información y toma de decisión, así como la posibilidad de emular una gran cantidad de dispositivos de medición y activar varios instrumentos al mismo tiempo, propician un creciente interés el desarrollo de estos [3]. En la actualidad existen muchas compañías que se dedican a la manufactura y comercialización tanto de instrumentos profesionales (como osciloscopios digitales que ya no solo visualizan sino que permiten almacenar las señales que adquieren) como de otros virtuales que aumentan cada vez más las prestaciones de las PC. Entre las más significativas se pueden mencionar: National Instruments, Computer Boards, Keithley, Hewlett Packard, IOTech y Data Translation.. 1.2 Instrumentación Virtual El concepto de instrumentación virtual nace a partir del empleo de la computadora personal (PC) como "instrumento" de medición de señales tales como la temperatura, presión, humedad, etc. La PC comienza a ser utilizada 19.
(23) para realizar mediciones de fenómenos físicos representados en señales de corriente (Ej. 4-20mA) y/o voltaje (Ej. (0-5Vdc). Sin embargo, el concepto de "instrumentación virtual" va más allá de la simple medición de corriente o voltaje, sino que involucra también todo lo que tiene que ver con el procesamiento, análisis, almacenamiento, distribución y despliegue de los datos e información relacionados con la medición de una o varias señales específicas [4]. Entonces un instrumento virtual (VI) se define como el conjunto de hardware y software que instalado en una PC le permite al usuario interactuar con la computadora de modo bastante similar a como utilizaría un instrumento electrónico tradicional. La conexión del instrumento virtual con el exterior se realiza mediante un hardware apropiado, para la captura, conversión y acondicionamiento de las señales eléctricas que representan a las variables físicas a estudiar [5]. El instrumento virtual está concebido para que el usuario posea amplias posibilidades de conexión en red y a otros periféricos. Las funciones de estos instrumentos son definidas por software, con una estructura abierta y flexible lo cual garantiza la reutilización y la reconfiguración [6]. 1.2.1 Conceptos, ventajas y desventajas del uso de la PC Todo instrumento virtual contiene tres elementos fundamentales: la adquisición, el análisis, y la presentación. La adquisición es el proceso mediante el cual una señal analógica es convertida a un formato digital y entregada a la PC. El análisis permite caracterizar la señal adquirida y es realizado por rutinas de software optimizadas para este objetivo y disponibles en diversos ambientes de desarrollo. La presentación de la señal adquirida y analizada se puede realizar de diversas maneras, ya sea utilizando el monitor de la PC, mediante una copia dura obtenida de una impresora o a través de ficheros [7]. Los instrumentos tradicionales como el osciloscopio o el generador de funciones tienen una funcionalidad ya predefinida desde la fábrica donde lo diseñan, producen y ensamblan. El término "virtual" nace precisamente a partir del hecho de que cuando se utiliza la PC como "instrumento" es el usuario 20.
(24) mismo quién, a través del software, define su funcionalidad y "apariencia" y por ello decimos que "virtualizamos" el instrumento, ya que su funcionalidad puede ser definida una y otra vez por el usuario y no por el fabricante [4] [7]. Para la construcción de un VI, sólo se requiere de una PC, el hardware apropiado (muchas veces una tarjeta de adquisición de datos PCMCIA, ISA, XT, PCI, etc. con acondicionamiento de señales) o el empleo de los propios sistemas de la PC y el software apropiado. Se dice que el "acondicionamiento de señales" es opcional, porque dependiendo de cada señal y/o aplicación, se puede o no requerir amplificación, atenuación, filtraje, aislamiento, o algún otro tratamiento a cada señal. Si la señal está en el rango de los +/- 5Vdc y no se requiere de aislamiento o filtraje, la misma puede ser conectada directamente a la tarjeta de adquisición de datos [4] [8]. En el instrumento virtual, el software es la clave del sistema, a diferencia del instrumento tradicional, donde la clave es el hardware. Sin embargo, las tarjetas de adquisición de datos, por su costo relativamente alto, han limitado en buena medida, la generalización de la instrumentación virtual. Por otra parte las tarjetas de sonido (TS) se han convertido en un componente imprescindible de las PC y actualmente forman parte de la tarjeta madre (mother-board) en todas las configuraciones. La mayoría de las tarjetas de sonido implementan cuatro funciones básicas: reproducción, captura, síntesis y procesamiento de sonido, lo que las convierte en una atractiva vía para buscar una razón de compromiso entre costos de implementación y calidad de instrumentos virtuales [5]. 1.2.2 Sistemas Comerciales En la actualidad existen diversos sistemas de adquisición y vías de implementación cada vez más completas. Un ejemplo de ello pudiera ser el LABJACK U12, un equipo de control y adquisición de datos portátil para PC. Este equipo permite la adquisición de señales con una resolución de 12 bits. Con conexión por puerto USB, no necesita alimentación externa y dispone de 21.
(25) software en inglés actualizable gratuitamente con librerías de National Instruments Labview y múltiples utilidades de visualización y control incluidas. También dispone de 8 entradas analógicas y 4 entradas analógicas diferenciales de 12 bits, con una razón de muestreo de 8 kSamples/seg, así como 20 entradas/salidas digitales. Incluye además un contador de 32-bits y soporta adquisición temporizada por hardware y software. Los datos obtenidos se muestran y se comparan en el software de su PC a modo de osciloscopio y se almacenan en el disco duro a intervalos configurables. Todas las opciones disponibles son mediante hardware, no dispone de jumpers. El software es compatible con los sistemas operativos Windows 98SE, Me, 2000 y XP.. 1.3 Sistema de Sonido de la PC 1.3.1 Aspectos del Hardware De forma general las tarjetas de sonido típicas, incorporan las funciones de Convertidor dígito-analógico y análogo-digital (DACs por sus siglas en inglés Digital-Analog-Conversor), encargadas de la conversión de las formas de ondas grabadas o generadas digitalmente en una señal analógica y viceversa. Tienen también un conector de entrada "Line In" por el cual puede entrar cualquier tipo de señal de audio proveniente de otro dispositivo como micrófonos, caseteras, entre otros, para la posterior digitalización de estas ondas y guardarlas en el disco duro del computador. Otro conector externo que tiene una tarjeta de sonido típica es el conector para micrófono. Este conector está diseñado para recibir una señal proveniente de dispositivos con menor voltaje al utilizado en el conector de entrada "Line-In". Muchos parámetros de las tarjetas de sonido son variables y dependientes del fabricante. Algunos intervalos típicos de estos parámetros se pueden apreciar en la Tabla 1.1.. 22.
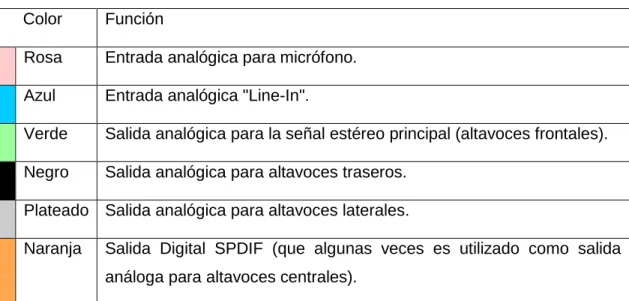
(26) Tabla 1.1 Intervalos Típicos de Algunos Parámetros de Tarjetas de Sonido. Rango Típico Parámetro. Entrada de Línea. Entrada de Micrófono. Impedancia de entrada. 10KΩ -- 47 KΩ. 1.5KΩ -- 20 KΩ. Ancho de banda de ent.. 10hz – 96Khz. 15hz – 20Khz. Máximo voltaje de ent.. 0.5V – 2V. 0.01V – 0.5V. Razón de muestreo. Hasta 192 Kmuestras/seg. Hasta 192 Kmuestras/seg. Resolución. 8, 16, 24, 32 bits. 8, 16, 24, 32 bits. Como puede apreciarse en la tabla, los rangos de voltajes de entrada, frecuencias de muestreo y resolución de las tarjetas de sonido resultan más que suficientes para muchas señales con relativamente estrecha composición espectral, siendo la principal limitación la existencia de una frecuencia de corte inferior, que imposibilita la adquisición de señales de muy baja frecuencia. Casi todas las tarjetas de sonido se adaptan al estándar PC99 de Microsoft que consiste en asignarle un color a cada conector externo, de este modo: Tabla 1.2 Estándar PC99 de Microsoft. Color. Función. Rosa. Entrada analógica para micrófono.. Azul. Entrada analógica "Line-In".. Verde. Salida analógica para la señal estéreo principal (altavoces frontales).. Negro. Salida analógica para altavoces traseros.. Plateado Salida analógica para altavoces laterales. Naranja. Salida Digital SPDIF (que algunas veces es utilizado como salida análoga para altavoces centrales).. 23.
(27) Los conectores más utilizados para las tarjetas de sonido a nivel de usuario son los mini-jack al ser los más económicos. Con los conectores RCA se consigue mayor calidad ya que permite contar con dos canales independientes (rojo y blanco). A nivel profesional se utilizan las entradas y salidas S/PDIF, también llamadas salidas ópticas digitales, que trabajan directamente con sonido digital eliminando las pérdidas de calidad en las conversiones[9]. Para el trabajo con interfaz MIDI se requiere de entrada y salida MIDI correspondientes al estándar propuesto inicialmente en un documento dirigido a la Audio Engineering Society por Dave Smith, presidente de la compañía Sequential Circuits en 1981. La primera especificación MIDI se publicó en agosto de 1983. Se trata de un protocolo industrial estándar que permite a las computadoras,. sintetizadores,. secuenciadores,. controladores. y. otros. dispositivos musicales electrónicos comunicarse y compartir información para la generación de sonidos. El protocolo incluye especificaciones complementarias de hardware y software [10]. 1.3.2 Aspectos de Software A continuación se describe brevemente el funcionamiento de la API (Application Programming Interface) de Audio de Windows cuando se desea tener acceso a los datos a medida que van llegando (funcionamiento cercano al Tiempo Real). El procedimiento para realizar la entrada de audio usando las funciones de la API de Windows es el siguiente:[11] 1. La tarjeta de sonido (o cualquier otro dispositivo de sonido compatible) se inicializa con la función WaveInOpen. 2. Se prepara el o los. buffers (segmentos de señal de. una duración. determinada) donde quedarán almacenadas las muestras de la señal con la función WaveInPrepareHeader. 3. Se añaden los buffers a la cola de buffers de la tarjeta de sonido con la función WaveInAddBuffer. 24.
(28) 4. Se da inicio a la entrada de señal con la función WaveInStart. 5. Cada vez que se llene un. buffer la aplicación recibe la notificación. correspondiente (ver significado del cuarto parámetro de WaveInOpen más adelante), de forma que se puedan retirar del mencionado buffer los datos adquiridos con una demora ínfima (la cercanía a tiempo real queda limitada por el tiempo de llenado del buffer, igual a su duración). 6. Se detiene la adquisición en el momento que se desee con la función WaveInStop. 7. Se le retira el control de los buffers a la tarjeta de sonido con la función WaveInReset. 8. Se liberan los buffers con la función WaveInUnprepareHeader 9. Se libera la tarjeta de sonido con la función WaveInClose. La función WaveInOpen mencionada en el primer paso es particularmente importante para comprender el funcionamiento de la adquisición, pues este queda prefijado con los parámetros que se le pasan (con @ se especifica que el parámetro es realmente la dirección de memoria donde se encuentra): WaveInOpen(@Hdl,DevNum,@Fmt,@WavInProc,Inst,Flag) El significado de estos seis parámetros es el siguiente: 1. Hdl: En este parámetro se almacena un handle (identificador) con el que se hará referencia a la tarjeta de sonido en las llamadas a las funciones siguientes. 2. DevNum: Este parámetro puede ser el valor de un identificador de dispositivo, o el valor de –1, si no se tiene el handle y se desea obtenerlo en el 1erparámetro. 3. (Hdl): En este caso la Media Control Interface de Windows se encarga de buscar un dispositivo capaz de trabajar con el formato que se pasa como el 3er parámetro.. 25.
(29) 4. Fmt: Formato en el que se desea adquirir la señal. Este es una estructura que contiene especificaciones de Frecuencia de Muestreo (Fs), # de Canales, Bits por Muestra, etc. 5. WavInProc: Dirección de -una función, -un handle de un evento, -un handle de una ventana, -o el identificador de un hilo de ejecución separado, a ser invocado cada vez que se llene un buffer. Esta es útil para efectuar la transferencia de los datos del buffer a la aplicación en el momento en que se ha llenado u otras operaciones requeridas en ese momento. Es importante destacar que si se usa una dirección de una función (opción empleada en este trabajo), dentro de esta función no se podrán invocar otras funciones de las API del sistema operativo que no sean de sincronismo de hilos, de lo contrario no se garantiza el funcionamiento del subsistema de audio. 6. Inst: Dirección de un objeto del usuario. Este parámetro se le pasa automáticamente al mecanismo de llamada definido en el 4to parámetro, junto con información sobre el motivo de la llamada (por ejemplo, el llenado de determinado buffer). 7. Flag: Constante que especifica con qué modo de funcionamiento se abre el dispositivo, básicamente define qué es el 4toparámetro. (en este caso se le pasa la constante “CALLBACK_FUNCTION” para emitir llamadas a la función definida por el 4toparámetro). 1.3.3 Algunos ejemplos En la actualidad, es creciente el número de interesados en el desarrollo de sistemas que emplean la tarjeta de sonido, como el Diseño de Estación Sismológica Asistida por Computador que permite la adquisición, detección y almacenamiento de eventos sísmicos en tiempo real y el análisis de los eventos almacenados fuera de línea, utilizando equipamiento estándar de computadoras personales, para ser utilizado en trabajos de campo o situaciones de emergencia. 26.
(30) Este sistema incorpora a los equipos de medición, circuitos electrónicos que filtran, amplifican y modulan en frecuencia las señales utilizando un VCO sobre la banda de voz (500Hz - 4kHz), con la finalidad de facilitar multiplexión sobre un mismo canal de transmisión de radio frecuencia, así como una interfaz implementada sobre LabView que se encarga de la adquisición y visualización en tiempo real. Eventos como el V Congreso de la Sociedad Cubana de Bioingeniería realizado entre el 10 y el 13 de junio de 2003 en La Habana, fueron el marco propicio para la presentación de trabajos como “ESTRATEGIAS PARA UNA INSTRUMENTACIÓN VIRTUAL DE BAJO COSTO CON APLICACIONES MEDICAS” que evidencian el interés en la adquisición a través de la tarjeta de sonido se referencia el empleo de la tarjeta de sonido tipo AD1815/16 de Creative Technology para adquirir y procesar las señales electrocardiográficas generadas con el electrocardiógrafo ECG 6101 Nihon Kohden y un simulador de ECG [12].. 1.4 Demodulación La demodulación no es más que el proceso inverso de la modulación, en el cual se extrae la señal mensaje de la portadora, eliminando el efecto de la misma en la señal recibida. La señal recuperada debe tener la misma frecuencia, así como las mismas características relativas a la amplitud [12]. En este caso es una demodulación de amplitud donde se intenta recuperar una señal con un nivel de offset por encima de cero y componentes de frecuencia por debajo de los 10 Hz. Para este tipo de demodulación existen varios métodos o formas de hacerla, a continuación abordaremos sobre algunas de ellas. 1.4.1 Detector de Envolvente La función principal de un detector de envolvente es recobrar la señal envolvente de la señal de amplitud modulada, mediante el seguimiento de su 27.
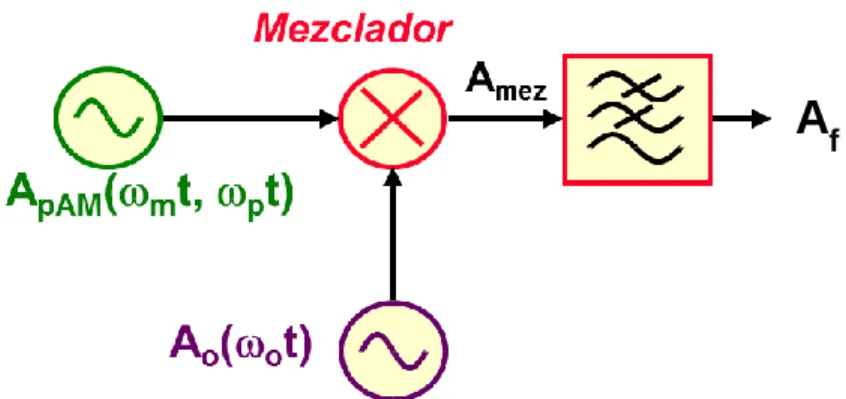
(31) lenta variación y la eliminación de las variaciones rápidas de la alta frecuencia de la señal portadora [13]. En este tipo de detector se busca que la salida siga la envolvente de la señal modulada [14] [12], o sea formar una onda con los picos máximos positivos de la señal recibida. En esencia es un circuito rectificador de onda con un capacitor a través de los terminales de salida. De esta forma se elimina el ciclo negativo, formando una onda a partir de los valores de los picos máximos y suavizándola con la disminución. del nivel rizado producido por el capacitor. Con estas. aproximaciones se logra formar una forma de onda muy semejante a la moduladora. Para garantizar una detección correcta es necesario que la envolvente no cruce por cero [15]. 1.4.2 Detector Coherente La detección coherente se obtiene de multiplicar la señal modulada por un tono de la misma frecuencia y fase que la portadora, para luego mediante un filtrado pasabajos obtener la señal de banda base original [15] [16]. Básicamente este detector está compuesto por tres bloques, uno para generar el tono, otro para multiplicar la señal modulada por el tono y por ultimo un filtro pasabajos para eliminar la frecuencia de la portadora, como se muestra en la figura (1.2):. Af. Fig. 1.2 Detector Coherente.. Si tenemos que la señal de entrada es: AM. (. m. p. ). [. m. (. m. )]. (. p. ). (1.1) 28.
(32) Y el tono generado es: o. (. o. ). (. o. ). o. (1.2). Luego de multiplicar ambas señales en el mezclador quedaría: [. mez. m(. m. )]. o. [. [(. p. o. ). ]. [(. o. p. ). ]]. (1.3) Si la señal proveniente del oscilador (bloque generador del tono) coincide en frecuencia y fase con la portadora, o sea. o. p. y. , entonces lo que. sale del filtro es: p. f. [. m. (. m. )]. (1.4). o. Que es proporcional a la moduladora. m. (. m. ).. Entonces podemos concluir que en la práctica se elimina el semiciclo negativo de la señal y se duplica la frecuencia de la portadora, para luego remover esta componente con un filtro pasabajos y quedarnos solamente con lo que sería la señal moduladora. 1.4.3 Detector Coherente en Cuadratura Existe otra alternativa de detector coherente [17], que requiere además de la señal S(t), su transformada de Hilbert Š(t) (la señal S(t) desfasada 90o, de ahí el nombre de demodulador en cuadratura de fase) [18]. En este proceso se considera que la señal está dada por la siguiente ecuación: ( ). ( ). (. p. ). ( ). (. p. ). (1.5). Es importante destacar que en el caso particular de la modulación de amplitud simple podemos considerar que Q(t) es cero, o sea, se transmite exclusivamente a componente de señal en cuadratura. La transformada de Hilbert de (1.5) es: S t I t sen pt Qt cos pt . (1.6). 29.
(33) Si se cuenta con dos portadoras de la misma frecuencia y en cuadratura de fase en el receptor. (. r. r. ) y. (. r. r. ), donde. r. es la diferencia. relativa entre las fases de las portadoras de recepción y transmisión, se puede realizar la demodulación mediante las ecuaciones:. I t 1 S t cos t S t sen t 2. (1.7). Q t 1 S t sen t S t cos t 2. (1.8). pues sustituyendo (1.5) y (1.6) en (1.7) y (1.8) se llega a:. I t cos p t cos t Qt sen p t cos t I t 1 2 I t sen t sen t Qt cos t sen t p p . (1.9). I t cos p t sen t Qt sen p t sen t Q t 1 2 I t sen t cos t Qt cos t cos t (1.10) p p y utilizando las identidades del seno y el coseno del ángulo suma, pueden formularse como: I t I t cos pt t Qt sen t pt . (1.11). Q t Qt cos pt t I t sen t pt . (1.12). que bajo la condición de r. ( ). r. p. y. r. se reducen a. r. ( ). ( ) y. ( ).. Aplicando el conocimiento de que la componente Q(t) original (transmitida) era cero, se puede deducir que cualquier valor no nulo en (1.12) se debe a la influencia del canal I(t) en Qr(t), y esto puede ocurrir sólo por ser φr≠0, o ωr≠ ωp. Este criterio resulta útil en el desarrollo de los métodos de sincronismo de portadora necesarios para lograr una demodulación correcta. En este trabajo se implementan versiones de los tres tipos de detector.. 30.
(34) 1.5 Conclusiones del Capítulo El sistema de sonido de la PC es cada vez más atractivo para el desarrollo de aplicaciones de procesamiento de señales. Desde el punto de vista de hardware cuenta con frecuencias de muestreo de hasta 192 KHz, resoluciones de hasta 32 bits por muestra en dos canales simultáneos, voltajes de entrada del orden de unidades de volt y acceso a microprocesadores cada vez con mayor potencia de cálculo. Desde el punto de vista de software se cuenta con drivers completamente estandarizados independiente del fabricante, y con actualización compatible garantizada para cada nuevo sistema operativo. La principal limitación de su uso radica en la existencia de una frecuencia de corte inferior (~10Hz) que impide su uso en muchas aplicaciones biomédicas, industriales, y otras de variación lenta. Este trabajo está encaminado al desarrollo de un sistema de demodulación de señales de baja frecuencia moduladas en AM, que en conjunto con un sistema de modulación externo permitirá la adquisición de señales con estas características en la PC.. 31.
(35) Capítulo 2 32.
(36) CAPÍTULO 2 PROGRAMACIÓN DEL VI El diseño y programación del Instrumento Virtual (VI) se realizó siguiendo un esquema general del proceso de demodulación para cada una de las alternativas antes descritas, como se muestra: 1. Adquisición de la señal. 2. Proceso de Demodulación. 3. Interfaz Usuario-VI.. 2.1 Programación en LabView Se empleó la versión de LabView 2010, el cual cuenta con mejoras con respecto a versiones anteriores en cuanto a diseño de sus paletas de control y funciones, así como VI’s internos nuevos que permiten la reducción de bloques empleados y mejorar el desempeño algunos diseños. 2.1.1. Adquisición de la señal.. La adquisición de la señal proveniente del dispositivo de sonido de la PC se realiza mediante el VI Acquire Sound, herramienta que logra la adquisición y transmisión datos provenientes del dispositivo de sonido. Este componente agrupa dentro de sí a los cuatro bloques o subVI’s comúnmente utilizados en la adquisición de señales provenientes de la tarjeta de sonido de la PC. Se configura automáticamente para cargar datos desde una de las entradas de sonido de la PC, carga el dato y luego de completar la adquisición vuelve a su estado inicial. Una vez inicializado el VI este bloque busca las entradas de sonido habilitadas y según la configuración que posea adquiere el dato de una forma o de otra, por lo que el usuario debe configurar algunos parámetros de este VI, como el número de canales (1 para mono y 2 para estéreo), resolución para especificar la calidad de cada muestra en bits, duración (en segundos), el radio de muestreo (Hz), y el dispositivo de entrada para verificar si está 33.
(37) tomando el canal de entrada de sonido correcto. Para utilizar este VI es necesario en el caso de que el sistema operativo que posea la PC sea Windows tener DirectX 8.0 o posterior y para el caso de Linux debe tener Open Sound System (OSS) [19]. 2.1.2 Proceso de Demodulación El proceso de demodulación se realizó en dependencia de las alternativas descritas en el Capítulo 1. Como consecuencia de esto se creó para cada una de las formas de demodulación descritas anteriormente, un VI capaz de realizar el proceso. 2.1.2.1 Detector de Envolvente Como se mencionó en el primer capítulo este tipo de demodulador lo que persigue es detectar la señal moduladora o envolvente, ya sea por detección de picos o por aproximaciones de los valores máximos positivos, el objetivo es el mismo. Teniendo en cuenta esto y los bloques presentes en el LabView, se formaron dos prototipos de detector de envolvente, el primero como detector de picos y el segundo como un aproximador de puntos positivos. 2.1.2.1.1 Detector de Envolvente I Para este caso básicamente se construyó un detector de picos. Luego del bloque de adquisición se colocó un Peak Detector VI el cual a partir de cualquier señal devuelve los picos máximos de la misma, este bloque trae la configuración por defecto idónea para realizar el proceso de demodulación de amplitud, puesto que viene configurado para detectar los picos por encima de cero para cualquier sinusoide. 2.1.2.1.2 Detector de Envolvente II En este prototipo, posterior al bloque de adquisición se colocó el Sample Compression VI, que permite a partir un número grande de puntos de datos aproximarlos hasta reducirlos a un número pequeño puntos de datos, según el método de reducción que se utilice, en este caso se empleó el método 34.
(38) “máximo”, que reduce las señales de entrada utilizando los valores más altos en cada segmento. Detrás de este un filtro pasabajos para eliminar los componentes de alta frecuencia de la portadora aún presentes. De esta manera comprimimos las muestras quedándonos con una serie de aproximaciones de los valores máximos presentes en la señal recibida, eliminando con esto casi por completo el semiciclo negativo de la señal, quedándonos solamente con los componentes necesarios para luego de un filtrado obtener finalmente la moduladora. 2.1.2.1.3 Detector de Envolvente III Este prototipo se hizo usando los bloques fundamentales de los detectores anteriores (Peak Detector VI y Sample Compression VI), buscando una mejor respuesta de señal demodulada con respectos a los VI’s. El VI se construyó de manera que se aprovecharan las principales ventajas de los dos subVI’s utilizados, primeramente se colocó detrás del bloque de adquisición el Peak Detector y luego de este el Sample Compression, de manera que se comenzara el proceso detectando los máximos picos de la señal para a continuación realizar una aproximación con los valores máximos de cada muestra, y así obtener una señal de salida bastante aproximada a la envolvente. 2.1.2.2 Detector Coherente La detección coherente tiene como principal obstáculo la necesidad de generar un tono puro en la misma frecuencia y fase que la portadora para luego multiplicarlo por la señal, lo que trae como consecuencia que un pequeño error o atraso en el sincronismo o sintonización con la portadora, conlleva a un error en el proceso de demodulación. En este VI se empleó la alternativa de multiplicar la señal por ella misma, elevándola al cuadrado. Esto nos lleva al mismo resultado sin los obstáculos antes mencionados.. 35.
(39) Para realizar lo antes expuesto solo fue necesario el empleo de dos bloques, el primero fue Formula Express VI para realizar el proceso matemático y el segundo fue Butterworth Filter VI para eliminar las altas frecuencias. 2.1.3 Interfaz Usuario-VI Para llevar a cabo el diseño de la interfaz de comunicación usuario-instrumento virtual se tuvo en cuenta que por lo general el usuario prefiere un ambiente de trabajo cómodo y sencillo, en el que le resulte fácil trabajar, pero que a su vez contenga todo lo necesario e imprescindible para el pleno desarrollo de la tarea. Persiguiendo esto se trabajó en base a diseñar una interfaz para cada uno de los VI’s creados que contara con todo lo necesario para realizar el proceso, pero que a su vez resultara muy sencillo de manipular para cualquier usuario. Los primeros parámetros a configurar por el usuario en cada uno de los VI’s, son los del bloque de adquisición de la señal, que son los mismos puesto que se empleó el mismo tipo de bloque para los tres instrumentos, que como fueron abordados anteriormente es imprescindible que el usuario verifique su configuración antes de empezar el proceso. 2.1.3.1 Interfaz para Detector de Envolvente I Para este instrumento la interfaz de comunicación usuario-instrumento se diseñó de como se muestra en la figura 2.1. 36.
(40) Fig. 2.1 Interfaz del Detector de Envolvente I.. Donde: 1 Duración del muestro. 2 Resolución en bits. 3 Radio de muestreo. 4 #’s de Canales. 5 Dispositivo de Entrada. 6, 7 y 8 Son los parámetros del bloque detector de picos ancho, umbral y picos/valleys, los cuales se deben mantener con la configuración con la cual viene por defecto. 9 Botón para parar el proceso. 10 y 11 Indicadores para la Distorsión de Armónicos de las señales de entrada y salida respectivamente. 12 Gráfico para la señal recibida. 13 Gráfico para la señal recibida (muestras en el tiempo). 14 Gráfico para la señal demodulada. 37.
(41) 2.1.3.2 Interfaz para Detector de Envolvente II Para este instrumento se diseñó de la siguiente manera:. Fig. 2.2 Interfaz del Detector de Envolvente II Donde: 1 Radio de Muestreo 2 Tiempo de Muestreo 3 Dispositivo de Entrada 4 Resolución 5 #´s de Canales 6 Tipo de Filtro 7 Orden del Filtro 8 y 9 Frecuencias de Corte 10, 11, y 12 Indicadores de THD de Señal de Entrada, Señal de salida del Filtro y Señal Multiplicada, respectivamente. 13 y 14 Gráficos para la Señal de Entrada 38.
(42) 15 Gráfico para la Señal Aproximada 16 Gráfico para la Señal Demodulada. 2.1.3.3 Interfaz para Detector de Envolvente III. Fig. 2.3 Interfaz del Detector de Envolvente III. Donde: 1 Duración del muestro. 2 Resolución en bits. 3 Radio de muestreo. 4, 5 y 6 Son los parámetros del bloque detector de picos ancho, umbral y picos/valleys, los cuales se deben mantener con la configuración con la cual viene por defecto. 7 #’s de Canales. 8 Parar el proceso. 9 Dispositivo de entrada. 39.
(43) 10 y 11 Indicadores para la Distorsión de Armónicos de las señales de entrada y salida del proceso. 12 Gráfico de la señal recibida. 13 Gráfico de la señal recibida (muestras en el tiempo). 14 Gráfico de la señal demodulada. 2.1.3.4 Interfaz para el Detector Coherente Puesto que el principio de funcionamiento de este VI es totalmente diferente a los anteriores se confeccionó de la manera siguiente.. Fig. 2.4 Interfaz del Detector Coherente.. Los parámetros 1, 2, 3 y 4 son los del bloque de adquisición. 5 Tipo de filtro. 6 y 7 Frecuencias de Corte. 8, 9 y 10 Indicadores de THD de Señal de Entrada, Señal Multiplicada y Señal Filtrada, respectivamente. 11 Gráfico de la señal adquirida. 12 Gráfico de la señal recuperada. 40.
(44) 13 Gráfico de la señal elevada al cuadrado. 14 Botón para para el proceso.. 2.2 Programación con Delphi En la implementación del VI se empleó la versión Delphi 10, que como anteriores versiones de Delphi es una herramienta de desarrollo de programas que permite la creación de aplicaciones sobre Windows. 2.2.1 Adquisición de la Señal Para este trabajo se empleó una biblioteca de componentes [20] desarrollados en Delphi 4.0 y que facilitan el trabajo con el subsistema de audio de Windows. Esta biblioteca brinda la posibilidad de emplear dos tipos básicos de componentes, uno para el trabajo a más bajo nivel con los buffers denominado ChunkPlayer, y otro a más alto nivel que añade la posibilidad de trabajo con ficheros de audio con extensión .WAV, denominado WavePlayer. El WavePlayer contiene un. ChunkPlayer para el trabajo a bajo nivel. Existen. versiones de ambos componentes para dos modos de trabajo (ver parámetros 4 y 6 de WaveInOpen) mediante llamada a una función, y mediante un manipulador de una ventana. En este trabajo se empleó la versión de llamada a una función, con empleo de hilos de ejecución separados y mecanismos de sincronismo de hilos. El componente ChunkPlayer efectúa la adquisición mediante el empleo de dos buffers de entrada (B1 y B2), de manera que cuando uno se llena el usuario pueda proceder a la descarga de su contenido mientras el otro está llenándose, y a su posterior reubicación en la cola de la tarjeta de sonido. La correcta temporización en el manejo de los buffers se logra en el ChunkPlayer mediante el uso de un evento de sincronismo (R) y se muestra en las figura 2.4 y 2.5. La figura 2.4 contiene el diagrama de flujo de la función pasada a WaveInOpen en el parámetro WavInProc. Su contenido es exclusivamente indicar en la variable 41.
(45) Buffer cual fue el buffer que se llenó, y activar el evento de sincronismo R del sistema, permitiendo que el hilo de ejecución dedicado al reciclado de los buffers proceda a efectuar el mismo. Llegada de Buffer. Sí M.L=@B1. Buffer=@B1. No. Buffer=@B2. Wake R. Fin Fig. 2.4 Diagrama de flujo de la función asignada para responder al mecanismo de comunicación de la API de Windows. En el parámetro M.L la función recibe la dirección del buffer lleno.. En la Figura 2.5 se muestra el diagrama de flujo del hilo de reciclado. A pesar de que este hilo de ejecución es implementado por el componente ChunkPlayer, se ha programado de manera que el WavePlayer que lo contiene le puede añadir un procedimiento a ejecutar (bloque de líneas discontinuas en el diagrama de la figura 2.5) y el usuario del WavePlayer puede añadir otro (bloque de línea de puntos en figura 2.5). De hecho, la tarea del WavePlayer es añadir los datos del buffer Buffer (transferidos a Data por ChunkPlayer antes de reciclar Buffer) a una lista manejada por él. 42.
(46) Wake R. Reset (R) Transfer Buffer → Data Procedimiento de Usuario del ChunkPlayer Add Data to Received List Procedimiento de Usuario del WavePlayer … …. Reciclar Buffer a la cola de Sonido. Sleep R. Fin. Fig. 2.5 Diagrama de flujo del hilo de ejecución de reciclado de buffers.. El proceso de demodulación y visualización de la señal pudiera ser efectuado en el recuadro de línea de puntos de la figura 2.5, pero pruebas preliminares arrojaron que se podían perder segmentos de señal en la lista del WavePlayer. La causa probable es una demora excesiva en el procesamiento, que cause la pérdida de un buffer de datos. Esto puede realmente ocurrir: cuando el procesamiento demora más que el llenado de un buffer, el WavInProc del siguiente ocurre antes de que se haya reciclado el actual, y B pasa a apuntar al más reciente, que entonces se recicla, quedando como único buffer en la cola. Con un solo buffer es inevitable la pérdida de algunos segmentos de señal. 43.
(47) Para solucionar este problema se dejó sólo la demodulación en el procedimiento de usuario del WavePlayer, y se efectuó la visualización de la señal en un procedimiento gobernado por un componente TTimer del Delphi, sincronizado con la duración de los buffers (100 mS). Para acceder a la lista de buffers del WavePlayer desde el TTimer fue necesario modificar la visibilidad de esta última de privada a pública. Al sacar el procedimiento de visualización del hilo de reciclado se garantiza que el reciclado se efectúe correctamente, pues el consumo de tiempo de las operaciones gráficas es muy superior al procesamiento requerido para la demodulación. 2.2.2 Proceso de Demodulación Para la implementación del proceso de demodulación de la variante del Demodulador Coherente en Cuadratura, variante explicada en el Cápitulo 1. Este proceso se puede dividir en subprocesos de la siguiente manera: 1. Transformada de Hilbert (recuadro en líneas discontinuas) 2. Demodulación (recuadro en línea de puntos). 3. Sincronismo de Portadora (recuadro en puntos y líneas).. GENERADOR DE PORTADORA. S(t). S(t). Ŝ(t) FILTRO PASOBANDA. -90º. SINCRONISMO DE PORTADORA. SEN(ct). COS(ct). FILTRO PASOBANDA. . D E M O D U L A D O R. I(t). Q(t). Fig. 2.6 Diagrama de Bloques del Receptor.. 44.
(48) 2.2.2.1 Filtrado y obtención de la Transformada de Hilbert Como se muestra en la fig. 2.6 el primer proceso (Transformada de Hilbert) está conformado por dos filtros pasabandas. Estos filtros cumplen dos objetivos, el primero es reducir en la práctica el nivel de ruido de la señal al limitar el ancho de banda de entrada, y el segundo es la obtención de la Transformada de Hilbert de la señal, que se diferencia de esta en un desfasaje de 90o. Ambos filtros tienen estructura FIR de 441 muestras, y fueron diseñados como un pasabajos trasladado a la frecuencia central deseada mediante la multiplicación por una portadora de esa frecuencia. Como filtro pasabajos original se empleó una ventana de Hamming de longitud igual a la del filtro (441 muestras), y como portadoras se emplearon una función coseno a la frecuencia de la portadora para el caso del filtro pasa bandas que entrega S(t) a su salida, y un seno a la misma frecuencia para el que entrega Ŝ(t). De esta manera se logra una misma repuesta de magnitud en ambos filtros, y el desfasaje deseado de 90o entre las salidas de ambos. Un aspecto importante en la implementación del filtrado es la continuidad entre los buffers provenientes de la tarjeta de sonido. Los filtros FIR tienen un retardo considerable entre la salida y la entrada, por lo que se requiere conservar muestras suficientes del buffer de entrada anterior para llenar el filtro FIR y que la salida obtenida sea idéntica a si el proceso fuera continuo. 2.2.2.2 Demodulación La demodulación se programó según la teoría de un demodulador QAM descrito en el Capítulo 1, empleando las ecuaciones 1.7 y 1.8, las cuales producen los valores de I y Q recibidas. 2.2.2.3 Generación y Sincronismo de Portadora Con cada muestra K de la señal de entrada se incrementa el argumento X de las funciones seno(X) y coseno(X), requeridas para la demodulación, en un. 45.
(49) valor de 2*pi*Fc/Fs, de manera que si no se efectuaran correcciones, en cada muestra K se cumpliría que: X = 2*pi*Fc/Fs*K. El sincronismo de portadora es el bloque que garantiza el correcto funcionamiento de la demodulación. El mismo tiene que garantizar que la portadora local se genere con un argumento X tal que en la recepción se obtenga Qr(t)=0 (recordar ecuaciones 1.11 y 1.12). A este fin primero se obtiene una señal de error de fase, para introducir una corrección contraria al error existente y así tender a una diferencia cero. Este es el funcionamiento típico de un lazo de control de fase [12]. En este caso se empleó como error la expresión E(r) = Qr(t)/Ir(t) siempre que Qr(t) < Ir(t), en otro caso E(r)=Sign(Q)*Sign(I). La expresión de error obtenida se filtra pasabajos para no efectuar correcciones debidas a ruidos espurios, empleando un filtro IIR de orden 1. 2.2.3 Interfaz de Usuario Se programó una interfaz de comunicación usuario-VI muy sencillo, con los parámetros imprescindibles para que el usuario tenga control sobre el proceso y visualice los aspectos fundamentales, y además pueda salvar la señal demodulada para la evaluación de su fiabilidad. La descripción del VI desarrollado se encuentra en el epígrafe 3.2.1.. 2.3 Medición de la distorsión de la señal demodulada Se consideraron tres alternativas para la estimación de la distorsión introducida por el demodulador. Estas son los grupos de medidas de diferencia o error, las medidas de correlación, y las medidas de distorsión espectral. En todos los casos hay que mencionar que existen grandes distorsiones en las señales externas, obtenidas empleando los generadores de señales disponibles, tanto en las portadoras y las moduladoras como en el mismo proceso de demodulación. El procedimiento de evaluación de la distorsión siempre partiría de recuperar una Sm(t) y evaluar la precisión de la recuperación. 46.
(50) 2.3.1 Medición de diferencias Las medidas basadas en la diferencia de una señal con respecto a otra “patrón” (RMS del error, desviación estándar, error en porciento, etc.) tienen el inconveniente de que diferencias de retardo y de atenuación producen un incremento inmerecido del error, por lo que habría que efectuar compensación para ambos efectos. Sin embargo, el mayor inconveniente está dado por la necesidad de contar con la señal de referencia, que en este caso por ser de baja frecuencia tendría que ser adquirida por otro canal, que introduciría su propia distorsión y alteraría la estimación de la deseada. 2.3.2 Medidas de correlación El empleo de técnicas de correlación permite eliminar la afectación por corrimientos (se mide en el desplazamiento que produce máxima correlación) o atenuaciones. Sin embargo, tiene el mismo inconveniente de no contarse con la señal original. 2.3.3 Medidas. de. Distorsión. Espectral.. Distorsión. Total. de. Armónicos (THD) En el espectro de la señal se puede estimar en cuanto esta se aleja de una sinusoide, cuantificando la cantidad de energía fuera del armónico o frecuencia de la sinusoide. Una medida ampliamente difundida en equipos de transmisión y amplificadores es la Distorsión Total de Armónicos, también conocido como monto total de distorsión no lineal o Total Harmonic Distortion (THD) Para determinar el THD de una señal, se miden las amplitudes de los armónicos que el sistema presenta relativo a la amplitud de la frecuencia fundamental, como se muestra en la siguiente ecuación: √. 47.
(51) donde. es la amplitud de la frecuencia fundamental,. segundo armónico,. es la del tercero,. es la amplitud del. la del cuarto, y así sucesivamente. [21]. En este trabajo se ha preferido el empleo del THD como medida de distorsión de la señal, porque aunque es comparable en cuanto a ventajas y desventajas a las medidas de correlación, tiene una ligera superioridad. Esta consiste en que ambas medidas pueden partir de la suposición de una sinusoide como señal pura, pero en la autocorrelación se necesita sintetizarla, y el parámetro de Fm original es desconocido. En el cálculo de THD sin embargo, podemos considerar que Fm se encuentra en el pico del espectro más pronunciado.. 2.4 Conclusiones del Capítulo Se seleccionaron las técnicas de demodulación a emplear, las plataformas de desarrollo de los VI’s (LabView y Delphi) y la evaluación a través del THD.. 48.
(52) Capítulo 3 49.
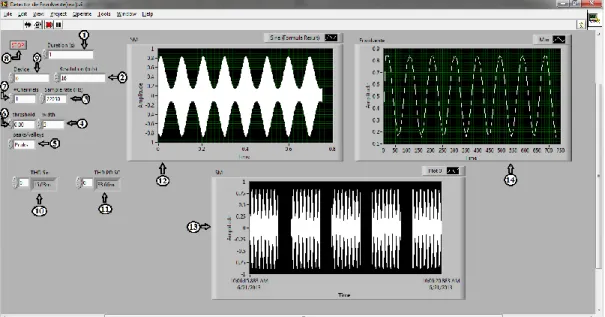
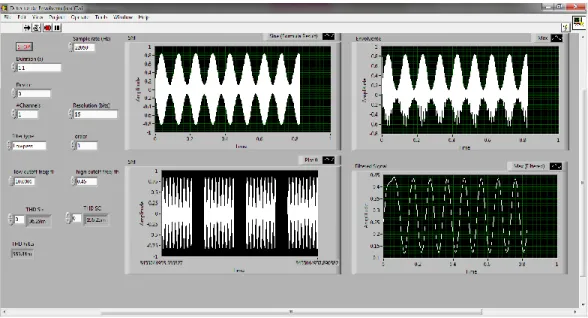
(53) CAPÍTULO 3 RESULTADOS Durante el desarrollo de este capítulo se exponen los resultados obtenidos con el empleo de los instrumentos descritos en el capítulo 2.. 3.1 Resultados en LabVIEW Se le realizaron pruebas a cada uno de los VI’s con una sinusoide de aproximadamente 10 Hz. con una amplitud relativa de 0.2 V y con una. portadora de 1kHz y 0.1 V de amplitud, buscando que la señal modulada no sobrepasase los 0.5V para que no saturara la entrada del micrófono en la PC. El análisis fundamental para probar la efectividad del proceso de demodulación en cada uno de los VI’s fue el THD que fue descrito en el capítulo anterior, el cual no solo nos ayuda a evaluar de cierta manera la eficacia del VI, sino que también nos sirve para comparar la respuesta de uno con otro, haciendo un ranking para buscar el mejor. Se llegaron a los siguientes resultados. 3.1.1 Pruebas al Detector de Envolvente I Como se puede apreciar en la Fig. 3.1 la señal de salida posee las mismas características de frecuencia y amplitud que la envolvente de la señal recibida, pero su medida de distorsión total de armónicos (THD) es alta con respecto a la señal de entrada, lo que indica un proceso de demodulación no ruidoso. ,. 50.
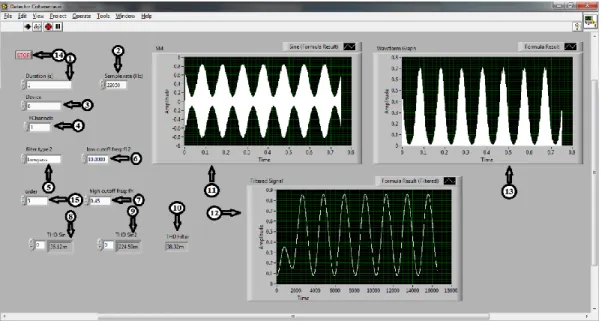
(54) Fig.3.1 Prueba con el Detector de Envolvente.. Un problema más grave puede apreciarse en la gráfica inferior del VI. La adquisición de audio empleando el VI AcquireSound de LabView no permite una grabación continua mediante su posicionamiento en un ciclo iterativo. Entre la entrega de un segmento de señal y el comienzo de la adquisición del siguiente ocurre un vacío en la señal, representado por las discontinuidades de la señal en la gráfica. La solución de este problema es suficientemente compleja como para descartar el LabView como sistema adecuado para la adquisición continua de señales de audio en tiempo real. De aquí en adelante se muestran los resultados de los VI’s de demodulación en cuanto a THD, pero con la limitante de conocer que no pueden ser empleados como una solución viable a la demodulación de AM por la tarjeta de sonido. 3.1.2 Pruebas al Detector de Envolvente II Las pruebas a este VI arrojaron una recuperación casi exacta de la envolvente. Este detector presenta una distorsión total de armónicos mayor que el anterior, acercándose al valor de THD de la señal modulada, lo que no indica una gran mejoría en el suavizado de la respuesta con respecto al primer detector.. 51.
(55) Fig. 3.2 Pruebas con el Detector de Envolvente II. 3.1.3 Prueba al Detector de Envolvente III Las pruebas realizadas a este VI arrojaron una buena aunque rústica detección de envolvente, presentando el mismo problema con el bloque de adquisición que los VI’s anteriores. En cuanto a la THD podemos decir que su respuesta es aceptable, cerca del doble de la THD de la señal de entrada.. Fig. 3.3 Pruebas con el Detector de Envolvente III.. 52.
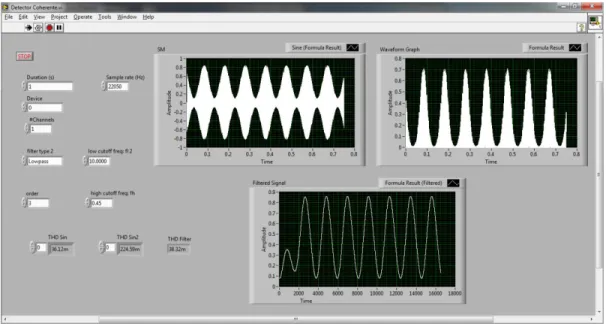
(56) 3.1.4 Pruebas al Detector Coherente Las pruebas a este detector arrojaron el mismo problema que los anteriores, afectando el desempeño del filtro utilizado. Aquí como en el caso del Detector de Envolvente II el filtro tiene un pequeño transiente provocado por el espacio entre las muestras provenientes del bloque de adquisición. A pesar de esta problemática los resultados también muestran una correcta demodulación de la señal recibida, con una recuperación bastante exacta del valor de amplitud de la señal recibida.. Fig. 3.4 Pruebas con el Detector Coherente.. 3.2 Resultados en Delphi El funcionamiento interno con doble buffer del VI desarrollado en Delphi impide la perdida de segmentos de señal como el ocurrido en LabView. 3.2.1 Funcionalidad Las pantallas principales de la aplicación desarrollada en Delphi se muestran en la figura 3.5 53.
(57) Fig. 3.5 Distintos gráficos disponibles en la interfaz de usuario. DE izquierda a derecha, arriba abajo: 1-Señal recibida S(t), 2-FFT de(S(t), para verificar coincidencia aproximada con la portadora del receptor, 3- Gráfico Q(t) vs I(t), sin activar sincronismo de portadora, se observa cambio continuo de la fase, que con amplitud constante de la portadora en S(t) describe una circunferencia, 4- Gráfico Q(t) vs I(t), activando sincronismo de portadora, se observa corrección permanente de la fase de manera que Q(t)~0.. Como aspecto notable puede señalarse el alto contenido de armónicos apreciable en la transformada de Fourier de la señal recibida (en este caso una portadora sin modular procedente de un generador) al capturar las imágenes. 3.2.2 Evaluación Cuantitativa Se desarrolló un experimento para evaluar la influencia de los niveles de modulación y magnitud relativa de las señales portadora y moduladora. Para ello se generaron señales con amplitudes de portadora (Ac) y de moduladora 54.
(58) (Am) correspondientes a dos escenarios (experimentos) diferentes. En uno se redujeron las amplitudes de ambas en manera proporcional (experimento 1) de manera que el mínimo de señal nunca cayera por debajo del 5% del rango dinámico de la señal (Ac - Am >= 0.05) y tampoco sobrepasara el 95% del rango dinámico (Ac + Am <= 0.95). En el otro experimento se redujo la amplitud de la moduladora con respecto a la portadora, manteniendo la mayor intensidad de señal total posible sin superar el 95% del rango dinámico (Ac + Am <= 0.95). Tabla 3.1 Configuración de portadora y moduladora en cada experimento.. Nivel 1 2 3 4 5 6 7 8 9. Experimento1 Ac Am 0.5 0.45 0.45 0.4 0.4 0.35 0.35 0.3 0.3 0.25 0.25 0.2 0.2 0.15 0.15 0.1 0.1 0.05. Experimento2 Ac Am 0.5 0.45 0.55 0.4 0.6 0.35 0.65 0.3 0.7 0.25 0.75 0.2 0.8 0.15 0.85 0.1 0.9 0.05. Las señales se generaron en MatLab, con una duración de 16 segundos, en una PC diferente a la que realiza la demodulación. Se empleó Fc= 1KHz y Fm 10Hz. La señal se conectó a través de la salida de audio la PC moduladora, y la entrada de línea de la demoduladora. El THD se calculó para FFTs de 44100 puntos sobre una señal demodulada muestreada a 44100 Hz. En la Figura 3.6 se muestran los resultados mínimo, máximo y promedio de 10 realizaciones de cada nivel de modulación para los dos experimentos.. 55.
(59) Resultados de los experimentos 1 y 2 16. THD (%). 14 12. Max1. 10. Min1. 8. Mean1. 6. Max2. 4. Min2. 2. Mean2. 0 1. 2. 3. 4. 5. 6. 7. 8. 9. Fig. 3.5 Resultados de THD para ambos experimentos. Valores medios en líneas continuas, valores extremos (mínimo y máximo) en líneas de puntos (experimento 1) y de líneas discontinuas (experimento 2).. Ambos experimentos muestran el resultado esperado de aumentar el deterioro a medida que disminuye la amplitud de la señal a recuperar (Am). En cuanto a la comparación entre ellos, el mayor deterioro mostrado en el Experimento 2 para el mismo valor de (Am) que el Experimento 1 sugiere que ocupar al máximo la amplitud de la portadora en el proceso de modulación es más importante que ocupar el rango dinámico de entrada del sistema de adquisición. 56.
(60) Conclusiones 57.
(61) Conclusiones . Se seleccionó como plataforma de desarrollo de los VI a evaluar el LabView, por su prestigio en el campo de la instrumentación virtual, y el Delphi, por contar con facilidades para el trabajo con el sistema de sonido y la visualización de señales en ese entorno.. . Se desarrollaron VIs con diferentes técnicas de demodulación, incluyendo variantes de detectores por envolvente y detectores coherentes.. . Se evaluó el funcionamiento de los VIs en cuanto a fidelidad de la señal demodulada a la señal original. Independientemente de los resultados de fidelidad obtenidos, no fue posible desarrollar un VI en LabView que funcionara adecuadamente. La adquisición de audio empleando el VI AcquireSound de LabView no permite una grabación continua mediante su posicionamiento en un ciclo iterativo. Entre la entrega de un segmento de señal y el comienzo de la adquisición del siguiente ocurre un vacío en la señal, representado por las discontinuidades de la señal en la gráfica. La solución de este problema es suficientemente compleja como para descartar el LabView como sistema adecuado para la adquisición continua de señales de audio en tiempo real. Los resultados del VI en Delphi apuntan a que es recomendable emplear al máximo la amplitud de la portadora en el proceso de modulación, por encima de otro factor como la amplitud máxima de la señal transmitida.. 58.
(62) Recomendaciones 59.
Figure


+7

Outline
Documento similar