Control vectorial de máquinas eléctricas de corriente directa
62
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubian” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419. II.
(3) PENSAMIENTO. “La mayoría de las ideas fundamentales de la ciencia son esencialmente sencillas y, por regla general pueden ser expresadas en un lenguaje comprensible para todos”.. Albert Einstein. III.
(4) DEDICATORIA. Este trabajo va dedicado a todas las personas que estuvieron siempre a mi lado, brindándome su apoyo cada día para mi formación. A mis amigos gracias por los momentos de estudio y disfrute juntos. A mi familia por brindarme su confianza y tiempo durante todos mis estudios. A mi novia por su dedicación.. IV.
(5) AGRADECIMIENTOS. El desafío de realizar un trabajo, tiene como recompensa la satisfacción de saber que se ha logrado y que este trabajo ayudará al desarrollo de una sociedad, demostrando así la capacidad de un hombre que ha obtenido los conocimientos adecuados para forjar una base en la cual se sustentará su vida y la de los que con este se relacionen. Es por eso que el presente trabajo va dirigido con expresión de gratitud para mis distinguidos Padres, hermano, novia e instructores académicos, que con nobleza y entusiasmo pusieron su apostolado en mis manos.. V.
(6) RESUMEN. En el sistema industrial se ha disminuido la utilización de los motores de CD, y así con el tiempo sus estudios también han decaído. A pesar de su complejo mantenimiento estos motores son necesarios aun para muchas aplicaciones debido a su amplio rango de velocidades y fácil control. Se propuso en este el trabajo un estudio acerca del comportamiento de la velocidad de los motores de CD a partir del control vectorial, variando señales de entrada en los convertidores. Para poder analizar estos comportamientos es necesario primeramente de un estudio teórico sobre el funcionamiento y estructura de los motores y convertidores. Su estudio fue realizado mediante la simulación en la herramienta SIMULINK del MATLAB, para esto fue necesario plantear el modelo matemático y su implementación en el programa. Luego de su simulación se llegaron a resultados concretos y convincentes de la eficiencia que tiene el control vectorial para la variación de la velocidad en los motores de CD, aportando así un nuevo método a utilizar en industrias donde sea necesario la implementación de estos motores.. VI.
(7) Contenido. PENSAMIENTO ............................................................................................................... III DEDICATORIA ................................................................................................................. IV AGRADECIMIENTOS ....................................................................................................... V RESUMEN........................................................................................................................ VI INTRODUCCIÓN ............................................................................................................... 1 CAPÍTULO 1. ASPECTOS TEÓRICOS RELACIONADOS CON LOS MODELOS MATEMÁTICOS DE LAS MÁQUINAS Y REGULADORES DE CORRIENTE DIRECTA. . 4 1.1. Motores de CD. Características y partes principales. ..................................... 4. 1.1.1. Clasificación de las máquinas de CD. ........................................................... 6. 1.1.2. Principio de Funcionamiento....................................................................... 12. 1.1.3. Control de Velocidad. ................................................................................. 17. 1.2. Convertidores de CD-CD ................................................................................. 19. 1.2.1. Conversores Buck y Boost. Estructura y funcionamiento ............................ 19. CAPÍTULO 2. MODELADO MATEMÁTICO DEL MOTOR DE CD Y CONVERSORES. IMPLEMENTACIÓN EN MATLAB. ................................................................................. 23 2.1. Modelado matemático del motor de CD. ........................................................ 23. 2.1.1. Estado estacionario .................................................................................... 25. 2.1.2. Diagrama de Bloques y control de velocidad .............................................. 26. 2.2. Modelado matemático del conversor Buck ................................................... 28. 2.3. Modelado matemático del conversor Boost .................................................. 31. 2.4. Aplicación del SIMULINK ................................................................................ 34. 2.4.1. Motor de CD ............................................................................................... 35. 2.4.2. Conversor Buck y Boost ............................................................................. 37. Capítulo 3: ANÁLISIS DE RESULTADOS. .................................................................... 40 3.1. Simulación de los convertidores independientes ......................................... 40. 3.2. Simulación de los convertidores con el motor. ............................................. 45. CONCLUSIONES Y RECOMENDACIONES ................................................................... 54 Conclusiones.............................................................................................................. 54 Recomendaciones...................................................................................................... 54 REFERENCIAS BIBLIOGRÁFICAS ................................................................................ 55.
(8) INTRODUCCIÓN. INTRODUCCIÓN Actualmente se emplean en aplicaciones de potencia variados tipos de máquinas eléctricas, la primera en ser desarrollada fue la máquina de corriente continua (CC). La razón de ello fue que, en un principio, no se pensó que la corriente alterna tuviera las ventajas que hoy se le conocen, especialmente en la transmisión de energía eléctrica a grandes distancias. Sin embargo la primera máquina de CC, fue ideada por el belga Gramme alrededor de 1860 y empleaba un enrollado de rotor especial (anillo de Gramme) para lograr la conmutación o rectificación del voltaje alterno generado. Posteriormente, el físico W. Siemens y otros, contribuyeron al desarrollo de estas máquinas realizando mejoras en su construcción, hasta llegar a la máquina de CC que se conoce hoy. Pese a las mejoras que han sido desarrolladas en su diseño, la máquina de corriente continua es constructivamente más compleja que las máquinas de corriente alterna, el empleo de escobillas, colector, etc., la hace comparativamente menos robusta, requiere mayor mantenimiento, y a la vez, tiene un mayor volumen y peso por kilo-watt de potencia.[1] No obstante lo anterior, la máquina de CC tiene múltiple aplicaciones, especialmente como motor, debido principalmente a: Amplio rango de velocidades, ajustables de modo continuo y controlable con alta precisión. Característica de torque-velocidad variable, constante, o bien, una combinación ideada por tramos. Rápida aceleración, desaceleración y cambio de sentido de giro. Posibilidad de frenado regenerativo. Las máquinas de corriente continua CC se caracterizan por su versatilidad. Mediante diversas combinaciones de devanados en derivación (shunt), en serie y excitación separada de los campos, se puede hacer que exhiban una amplia variedad de curvas características volt-ampere y velocidad-torque, tanto para funcionamiento dinámico como para estado estacionario. Debido a la facilidad con la que se pueden controlar, a menudo se usan sistemas de máquinas de CC en aplicaciones donde se necesita una amplia gama de velocidades de motor o de control de la potencia de éste[2]. Como resultado de un intenso esfuerzo en investigaciones, en años recientes ha producido otras variantes de máquinas eléctricas, tales como máquinas de CD sin escobillas (Brushless), máquinas de imanes permanentes y máquinas de reluctancia variable, que son una alternativa viable en muchas aplicaciones[3]. Sin embargo, durante las tres últimas décadas, la investigación en el desarrollo de la tecnología de impulsores se ha incrementado, el costo y el desempeño de los mismos han mejorado considerablemente. Su popularidad en la industria está definitivamente en alza. El control vectorial fue desarrollado originalmente para aplicaciones de motor con alto rendimiento, y para funcionar sin problemas en todo el rango de velocidad, incluso puede generar torque completo a velocidad cero. Además, es capaz de lograr una rápida 1.
(9) INTRODUCCIÓN. aceleración y desaceleración. Se está convirtiendo en cada vez más atractivo para aplicaciones de requerimiento más bajo debido al menor tamaño del motor, con reducción de costos y consumo de energía. Algunos aspectos significativos del control vectorial son: Se necesita medición de velocidad o posición del rotor, o algún tipo de estimación. El torque y el flujo pueden cambiar rápidamente, en el orden de 5-10 milisegundos, cambiando las referencias. La frecuencia de conmutación es generalmente constante. La precisión alcanzada en el torque y la velocidad depende de la precisión de los parámetros del motor utilizados en el control. Una de las aplicaciones típicas de los variadores vectoriales es en la industria plástica, como en máquinas extrusoras. Debido a la facilidad de control de estas máquinas se emplean en donde se requieren aplicaciones de velocidad variable, tomando en cuenta los problemas que tienen en operación: una menor eficiencia con respecto a las máquinas de corriente alterna (CA) debido a las escobillas que conectan la parte fija y la móvil de la máquina. Aún con este problema, existen aplicaciones en donde las máquinas de CD no han podido ser sustituidas por máquinas de CA.[4] Es por eso que el control de motores eléctricos es un tema que ha adquirido gran importancia a partir de la automatización de los procesos industriales y de la incorporación cada vez más notoria de la electrónica y de la electrónica de potencia en el control de máquinas eléctricas. Hoy en día en un ambiente típicamente industrial se puede tener tecnologías convencionales tal como los controles por relevadores variando corriente de campo o corriente de armadura, que son técnicas de control no lineal. Para poder analizar estos métodos en el presente se requiere del conocimiento físico del sistema, de las unidades de las constantes que aparecen en el modelo, la selección adecuada de las variables de estado y el conocimientos de desarrollo de ecuaciones diferenciales utilizando la transformada de Laplace y a su vez para poder observar el comportamiento un simulador el cual para objeto de estudio se utiliza SIMULINK una herramienta del programa MATLAB. Por todo lo antes expuesto la interrogante científica del trabajo es: ¿cómo controlar eficientemente un motor eléctrico de corriente directa utilizando un regulador? Objetivo general de la investigación: Implementar un control de velocidad en un motor eléctrico de corriente directa utilizando un regulador. Objetivos específicos de la investigación: Fundamentar los referentes teóricos relacionados con los modelos matemáticos de las máquinas de corriente directa, así como de reguladores de corriente directa. Analizar diferentes métodos de control vectorial utilizados en la actualidad para el control de motores de corriente directa. Implementar en el SIMULINK el modelo matemático del motor de CD con un regulador. Analizar los resultados obtenidos. 2.
(10) INTRODUCCIÓN. Tareas técnicas: 1) Revisión de referentes teóricos de los motores eléctricos de corriente directa y del funcionamiento de los reguladores de directa actuales. 2) Análisis de los diferentes modelos matemáticos y la implementación en el SIMULINK del MATLAB del motor de corriente directa con el regulador. 3) El análisis de los resultados obtenidos mediante la simulación. El capítulo uno aborda los referentes teóricos relacionados con las máquinas y reguladores de corriente directa. En el capítulo dos se analizan los diferentes métodos de control vectorial utilizados en la actualidad para el control de motores de corriente directa, también se realizan simulaciones analizando su comportamiento. El capítulo tres muestra diferentes resultados obtenidos de las simulaciones en el SIMULINK con el modelo matemático del motor de CD con un regulador. La sección final contiene las conclusiones, recomendaciones y las referencias bibliográficas.. 3.
(11) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. CAPÍTULO 1. ASPECTOS TEÓRICOS RELACIONADOS CON LOS MODELOS MATEMÁTICOS DE LAS MÁQUINAS Y REGULADORES DE CORRIENTE DIRECTA. Es necesario para la correcta realización de una investigación, el desarrollo de un profundo análisis bibliográfico sobre el tema a tratar, pues este constituye el pilar fundamental que sustenta al proceso investigativo. El análisis bibliográfico constituye esencialmente en detectar, obtener, y consultar la bibliografía y luego extraer y recopilar la información relevante y necesaria que atañe al problema científico a resolver. Uno de los principales objetivos que persigue es fijar la investigación dentro de un conjunto de conocimientos, que permita orientar los pasos de forma adecuada a los términos que se utilicen (Wolfe, 1999; citado en Hernández Aro y Rodríguez Ruiz, 2006). El presente capítulo se sustenta en el análisis de la bibliografía y otras fuentes consultadas con vistas a lograr una conceptualización objetiva de las principales definiciones y tendencias a abordar en la investigación. Para ello se hace prudente la revisión del Hilo Conductor que inserta un análisis de los aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de corriente directa 1.1. Motores de CD. Características y partes principales.. Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en eléctrica, funcionando como generadores. Los motores eléctricos de tracción usados en locomotoras realizan a menudo ambas tareas, si se los equipa con frenos regenerativos.[5] En la actualidad su uso está dado como motor, ya que la generación de energía en corriente continua se logra mediante equipos rectificadores, de mejor eficiencia y menor costo. En cuanto a su uso como motor, tiene gran importancia en la industria automotriz ya que los vehículos, cuentan con un número importante de motores de pequeña potencia (limpiaparabrisas, motor de arranque, levanta vidrios, calefactor, etc.).[6] Los motores de CD siguen siendo la acción común si se necesita de accionamientos eléctricos que operan en un rango amplio de velocidad. Esto es debido a sus propiedades operacionales y sus características de control, siendo la única desventaja esencial el conmutador mecánico el cual restringe la potencia y la velocidad del motor, aumenta la inercia, la longitud axial y necesita mantenimiento periódico. En todo proceso de diseño actual, el paso previo a la fabricación de cualquier sistema de control son los prototipos, a su vez, el paso previo a los prototipos es el análisis y la simulación a través de la computadora. Con ello se persiguen fundamentalmente los: cierta comodidad, debido a que distintas pruebas de simulación tan solo requieren ciertos cambios en las líneas de un programa.[7]. 4.
(12) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Para el análisis de la máquina de corriente continua es imprescindible comenzar por su composición y las partes que la integran, las cuales se distingue por dos: La inmóvil, destinada principalmente para crear el flujo magnético La rotatoria, llamada inducido, en la que transcurre el proceso de transformación de la energía mecánica en eléctrica (generador eléctrico) o a la inversa, la transformación de la energía eléctrica en mecánica (motor eléctrico). Las partes inmóvil y rotatoria están separadas una de otra por un espacio denominado entrehierro. La parte inmóvil o estator de la máquina de continua está compuesta por los polos principales, destinados a crear el flujo magnético principal; auxiliares o polos de conmutación, instalados entre los principales y que sirven para lograr el funcionamiento sin chispas de las escobillas en el colector (en el caso de falta de espacio en las máquinas de pequeña potencia los polos auxiliares no se instalan); y el armazón o yugo. El inducido representa un cuerpo cilíndrico, que gira en el espacio entre los polos, y está compuesto por el núcleo dentado del inducido, el devanado arrollado a éste, el colector y el aparato de escobillas.[8]. Figura 1.1: Partes de una máquina de CD. Para algunas máquinas de CD también son indispensables los carbones o escobillas que conectan la parte fija y la móvil, el colector de delgas que actúa como un rectificador mecánico, y los polos auxiliares que ayudan a reducir el efecto de la reacción de inducido. En estas máquinas también es necesario comentar que el devanado de campo es colocado en el estator y al devanado que va colocado en el rotor se le conoce como devanado de armadura.. 5.
(13) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.2: Devanado de armadura de una máquina de CD.. Una característica importante de estas máquinas es que se pueden encontrar de acuerdo con la aplicación que se requiera ya que existen diferentes tipos de conexiones y entre las principales se encuentra la conexión serie, paralelo, compuesto, excitación independiente, imanes permanentes, etc.[4] 1.1.1. Clasificación de las máquinas de CD.. Puesto que el devanado de campo es un electroimán, una intensidad de corriente debe fluir a través de él para producir un campo magnético; esta corriente se conoce como corriente de excitación y se puede suministrar al devanado del campo en dos formas: puede provenir de una fuente externa independiente de CD, en cuyo caso el motor o generador se clasifica como de excitación independiente, o bien puede provenir dela propia conexión de la armadura del motor o generador en cuyo caso se denomina autoexcitado. Cuando un devanado de campo se excita por medio de una CD se establece un flujo magnético fijo en la máquina, y si se aplica un esfuerzo mecánico al eje del rotor (o más correctamente, la armadura) haciendo que gire, las bobinas de la armadura cortarán el flujo magnético induciéndose en ellas una tensión de CA convirtiéndola en CD mediante el colector de delgas y las escobillas, y en este caso la máquina se encuentra operando como generador de CD. Si el devanado de armadura es excitado mediante una fuente de CD y al mismo tiempo el devanado de campo es excitado por la misma fuente de CD o una fuente externa, ambos flujos interactúan haciendo que la armadura de la máquina gire en cierta dirección; en este caso esta máquina está operando como motor. Hay cinco clases principales de Motores CD de uso general: a) Motor CD Conexión Serie. b) Motor CD Conexión Paralelo o Shunt. c) Motor CD Conexión Compuesta. d) Motor CD Conexión Imán Permanente. e) Motor CD Conexión Independiente a) Motor CD Conexión Serie. 6.
(14) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Se designa así al motor de corriente continua cuya bobina de campo (inductor) está conectada en serie con la bobina de armadura (inducido). Al igual que en los generadores serie, las bobinas de campo son construidas de pocas espiras y con conductor de gran sección. Este motor se caracteriza por su par de arranque elevado, ya que el par de esta máquina es directamente proporcional a la corriente de armadura al cuadrado. El problema que tiene esta máquina es que si se deja en vacío en condiciones nominales, presenta el peligro de embalarse debido al reducido valor del flujo de campo que depende de la corriente de campo. Recordando que la corriente de campo es igual que la corriente de armadura por estar conectados en serie, como la máquina se encuentra en vacío la corriente de armadura es prácticamente cero. En consecuencia, la velocidad del motor depende totalmente de la corriente de campo, por lo tanto la velocidad es baja cuando la carga es pesada y alta con cargas ligeras.[4] El circuito equivalente de este motor se encuentra representado en la figura 1.3, en donde se puede ver que las ecuaciones de la máquina son. 𝑉𝑡 = 𝐸𝑎 + (𝑅𝑎 + 𝑅𝑠 )𝐼𝑎 (1.1) 𝐼𝑎 = 𝐼𝑠 = 𝐼𝐿 (1.2) Vt = Voltaje en los terminales Ea = Voltaje de armadura Ra y Rs = Resistencias de armadura y serie respectivamente Ia e Is = Corrientes de armadura y serie El voltaje en las terminales de la armadura también se puede calcular a partir de. 𝐸𝑎 = 𝑘∅𝜔 (1.3) k = Constante que depende de la construcción de la máquina ∅ = Flujo del devanado de campo serie dado [webers] 𝜔 = Velocidad angular de la máquina [rad/seg] El par que entrega la máquina entre sus terminales está dado por. 𝜏 = 𝑘∅𝐼𝑎 (1.4) 𝜏 = par que proporciona la máquina en [N-m] Ia = Corriente de la armadura Los motores serie de C.D presentan una pésima regulación de velocidad, con cargas muy pesadas la velocidad de operación es muy pequeña y en vacío, excesivamente alta. Para variaciones grandes de carga, su velocidad de operación varía mucho. El momento electromagnético depende directamente de la intensidad del campo magnético. Con una carga elevada la rotación de la armadura será más lenta, esto reduce la fuerza contraelectromotriz en la armadura y aumenta la corriente a través de la misma, aumentando la intensidad del campo. Por consiguiente una carga elevada origina tanto un aumento en el flujo magnético de la armadura como en el flujo magnético del campo y de esta manera el momento electromagnético del motor es incrementado. Si no existe carga en el motor y se le aplica un voltaje constante, la única oposición a la velocidad del motor es la fuerza contraelectromotriz y las pérdidas rotacionales; al ir adquiriendo velocidad el motor, la fuerza contraelectromotriz aumenta dado que la velocidad de corte de líneas de fuerza aumenta y la corriente a través de la armadura disminuye. Una disminución en la 7.
(15) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. corriente de armadura significa una disminución en la corriente del campo debido a que ambos devanados están en serie, produciendo un debilitamiento del campo. Los motores serie tienen un alto par de arranque, por esta razón nuca deben de arrancarse sin carga, debido a que el motor alcanzaría una velocidad peligrosa. En la figura se pueden ver las bobinas La y Ls de forma ficticia, ya que como se sabe una bobina alimentada con una fuente de corriente directa se comporta como un cortocircuito en estado permanente creando un campo magnético fijo.. Figura 1.3: Circuito del motor serie. Alguna de las principales características de estas tipos de motores son las siguientes: Momento de arranque muy elevado. Difícil control de velocidad. Requiere reóstato de arranque. Se utiliza para tracción eléctrica.. b) Motor CD Conexión Paralelo o Shunt. El motor de CD en paralelo es diferente del motor de serie ya que el devanado inductor está conectado en paralelo con la armadura. Puesto que el devanado inductor se conecta en paralelo al devanado del inducido, a este tipo de máquinas se le conoce como motor con excitación en paralelo, o simplemente motor paralelo. Un motor en paralelo o en derivación tiene características diferentes en construcción al motor serie, ya que la bobina de campo en derivación está devanada con alambre de calibre delgado y muchas vueltas para generar un campo lo suficientemente fuerte para mantener la velocidad de esta máquina prácticamente constante. Esto significa que el motor tiene un 8.
(16) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. par de arranque menor que el motor serie, pero es más estable con respecto a su velocidad de operación. [4] Las ecuaciones que rigen a este tipo de máquina se pueden obtener a partir del circuito equivalente mostrado en la figura 1.4.. 𝑉𝑡 = 𝐸𝑎 + 𝐼𝑎 𝑅𝑎 𝑉𝑝 = 𝑉𝑡 (1.6). (1.5). Vt = Voltaje en los terminales Ea = Voltaje de armadura Ra = Resistencia de armadura Ia = Corrientes de armadura Vp = Voltaje de campo paralelo Las ecuaciones 1.3 y 1.4 se aplican de la misma forma a este tipo de máquina.. Figura 1.4: Circuito equivalente del motor paralelo a) autoexcitado, b) excitación separada.. Alguna de las principales características de estas tipos de motores son las siguientes: Momento de arranque menor que en el motor serie. Muy estable. Requiere reóstato de arranque en el inducido. Utilizado en máquinas herramientas.. c) Motor CD Conexión Compuesta. Un motor compuesto combina las características de los motores serie y paralelo, ya que esta máquina tiene un devanado de campo serie y un devanado de campo paralelo. Dependiendo de la conexión de estos devanados, estas máquinas pueden clasificarse como: motor compuesto largo o motor compuesto corto, y éstas a su vez pueden ser aditivas o sustractivas.. 9.
(17) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Cuando el devanado de campo serie se conecta en serie con la armadura se conoce como motor compuesto largo, cuando el devanado de campo serie se conecta en serie con la línea se le conoce como motor compuesto corto. Dependiendo de las marcas de la polaridad de las bobinas de excitación serie y paralelo, se clasifican como aditivas y sustractivas. Si la dirección de las corrientes en las bobinas serie y paralelo entran o salen por las marcas de polaridad a esta máquina se le conoce como motor compuesto (largo o corto) aditivo, si la corriente en uno de los devanados entra por el signo de polaridad y en el otro devanado el sentido de la corriente sale por el signo de polaridad al motor se le conoce como motor compuesto (largo o corto) sustractivo. En la figura 1.5 se muestra el circuito equivalente del motor compuesto largo y corto. En esta máquina se debe de tener cuidado con la conexión respetando las marcas de polaridad, ya que si se conecta con la polaridad de los (*) los flujos internos de la máquina se suman (aditivo), y si se conectan con la polaridad de los (^) los flujo internos se restan (sustractivo). [4]. Figura 1.5: Circuito equivalente del motor compuesto a) largo y b) corto. A partir del circuito equivalente de la figura 1.5 (a) se pueden obtener las ecuaciones del motor compuesto:. 𝑉𝑡 = 𝐸𝑎 + (𝑅𝑎 + 𝑅𝑠 )𝐼𝑎 𝑉𝑡 = 𝑉𝑝 (1.6) 𝐼𝐿 = 𝐼𝑎 + 𝐼𝑝 (1.7) 𝐼𝑎 = 𝐼𝑠 (1.8) 𝐼𝑝 =. 𝑉𝑝 𝑅𝑝. (1.1). (1.9). y a partir de la figura 1.5 (b) se pueden obtener las ecuaciones. 𝑉𝑡 = 𝐸𝑎 + 𝑅𝑎 𝐼𝑎 + 𝑅𝑠 𝐼𝑠 (1.10) 𝑉𝑝 = 𝐸𝑎 + 𝑅𝑎 𝐼𝑎 (1.11) 10.
(18) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. 𝐼𝐿 = 𝐼𝑠 = 𝐼𝑎 + 𝐼𝑝 𝐼𝑝 =. 𝑉𝑝 𝑅𝑝. (1.12). (1.9). Vt = Voltaje en los terminales Ea = Voltaje de armadura Ra = Resistencias de armadura Rs = Resistencia serie Rp = Resistencia paralelo Vp = Voltaje de campo paralelo Ia = Corriente de armadura Ip = Corriente de campo paralelo Las ecuaciones 1.3 y 1.4 se aplican de la misma forma a este tipo de máquina. Alguna de las principales características de estas tipos de motores son lassiguientes: Momento de arranque más elevado que el motor paralelo. Muy estable. Requiere reóstato de arranque en el inducido. Utilizado en máquinas herramientas y para tracción. En estos motores la FEM en reposo es cero, y por consiguiente, la corriente y el momento de arranque sólo quedan limitados por la resistencia del circuito de armadura.. d) Motor CD Conexión Imán Permanente. Un Motor CD de imán permanente es un Motor CD cuyos polos están hechos de imanes permanentes. En algunas aplicaciones, los Motores CD ofrecen muchos más beneficios que los Motores CD en derivación. Puesto que, estos Motores no requieren circuito de campo externo, no tienen las pérdidas en el cobre del circuito de campo asociados con los Motores CD en derivación. Debido a que no requieren devanado de campo, estos Motores pueden ser más pequeños que los correspondientes Motores CD en derivación. Los Motores CD de imán permanente son muy comunes en tamaños pequeños de caballaje fraccional y subfraccional, en los cuales no puede justificarse el costo y espacio de un circuito separado de campo. Obsérvese en detalle la figura 1.6.. 11.
(19) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.6: Circuito Equivalente Motor Imán Permanente. e) Motor CD Conexión Independiente. Por medio de la alimentación CD del rotor y del estator de dos fuentes de tensión independientes, como se detalla en la figura 1.7. El campo del estator es constante al no depender de la carga del motor, y el par de fuerza prácticamente es constante. Las variaciones de velocidad al aumentar la carga se deberán solo a la disminución de la fuerza electromotriz por aumentar la caída de tensión en el rotor. Se aplica donde se requiera una velocidad prácticamente constante como grúas marinas ventilador de hornos, tornos, taladros de materiales, desenrollado de bobinas y proceso de útiles.[9]. Figura 1.7: Equivalente Eléctrico Motor CD Conexión Independiente. 1.1.2. Principio de Funcionamiento.. En el bobinado del rotor o armadura de una máquina de corriente continua se producen cantidades eléctricas alternas (tensiones y corrientes). Gracias a un ingenioso dispositivo 12.
(20) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. mecánico, denominado colector se ha podido convertir estas cantidades alternas en cantidades de continua, es decir, de valor medio constante. Para comprender de manera sencilla el funcionamiento del colector conviene utilizar la máquina de continua elemental operando como generador. Sea un generador con un rotor de dos ranuras diametralmente opuestas, las cuales alojarán los dos conductores de una espira, tal como se ve en la figura 1.8:. Figura 1.8: Generador elemental de alterna con una sola espira. Los extremos de la espira se han conectado a dos anillos aislados entre sí, y sobre los anillos se han instalado las escobillas A y B, a las cuales se conecta los bornes externos del generador. Se conviene en llamar a la línea que pasa por el centro del inducido, justamente por la mitad de la distancia entre los polos N y S, línea neutra geométrica; y a la parte de la circunferencia del inducido 𝜏, que corresponde a un polo, paso polar. La máquina representada en la figura 1.8 tiene dos pasos polares y un par de polos. Al girar el rotor de radio r con una velocidad angular 𝜔 cada conductor se desplazará a lo largo de la periferia del rotor con una velocidad tangencial, induciéndose instantáneamente en cada uno de ellos una f.e.m. En una vuelta completa de la espira la f.e.m., variable con el tiempo, cambia su polaridad dos veces. Como los dos conductores están en serie, la f.e.m. resultante en los bornes de la espira es el doble de la de cada conductor.. 13.
(21) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.9: Sinusoide de la f.e.m.. En la figura 1.9 se muestra la sinusoide de la f.e.m. Recuérdese que el número de polos es siempre par. Examinando la figura 1.8, se ve que cada escobilla está conectada por intermedio del anillo con un solo conductor. Por consiguiente, en los bornes del circuito exterior; Por consiguiente, en los bornes del circuito exterior surge tensión variable con el tiempo y por éste se genera una tensión alterna de una cierta frecuencia. Para obligar a esta tensión a aparecer por el circuito exterior en una sola dirección cualquiera, es decir, rectificarla, la máquina es dotada de un dispositivo especial llamado colector. Véase la figura 1.10. Su principio de funcionamiento consiste en lo siguiente. Los extremos de la espira se conectan a dos segmentos de cobre (llamados también delgas o láminas de colector) aislados entre sí con mica y montado el conjunto sobre el mismo eje del rotor aunque eléctricamente aislado de él. Sobre las delgas se colocan las escobillas A y B, fijas en el espacio, las cuales conectan la espira con el circuito exterior. La disposición de las escobillas en las delgas tiene mucha importancia.. 14.
(22) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.10: Esquema de funcionamiento de una máquina de CC.. Para rectificar totalmente la tensión alterna es necesario colocar las escobillas a lo largo de la línea media que pasa por los polos denominados también eje principal: de este modo la f.e.m. inducida en la espira se hace igual a cero cuando la escobilla pasa de una delga a otra. Entonces, al girar el rotor, en la espira se sigue generando f.e.m. variable, pero cada una de las escobillas hará contacto sólo con aquella delga y, por consiguiente, con aquel conductor que se encuentren bajo el polo de polaridad dada. Por consiguiente, la tensión se aplicará al circuito exterior sólo en una dirección, en otras palabras, tiene lugar la rectificación de la f.e.m. variable inducida y alterna en la espira a f.e.m. pulsante en las escobillas y, por lo tanto, en el circuito exterior. Si logramos fijar la escobilla B a una tensión de referencia, por ejemplo, la tensión cerro, se obtiene la gráfica de la figura 1.11. [10]. Figura 1.11: F.e.m. rectificada en función del tiempo.. La entrega de torque en la máquina de CC lo establece la relación: 15.
(23) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. 𝑇 = 𝑘𝑚 𝐼 ∅𝑒𝑥 (1.13) Donde: 𝑇 : Torque entregado por la máquina. 𝑘𝑚 : Constante de la máquina. 𝐼: Corriente de armadura ∅𝑒𝑥 : Flujo producido por la corriente de campo Su funcionamiento se basa en el siguiente principio básico del electromagnetismo: la interacción entre dos campos magnéticos posicionados 90º entre sí genera un efecto de atracción y repulsión resultando en movimiento. Cuando un conductor, por el que pasa una corriente eléctrica, se sumerge en un campo magnético, el conductor sufre una fuerza perpendicular al plano formado por el campo magnético y la corriente, de acuerdo con la Fuerza de Lorenz:. 𝐹 = 𝐵 ∗ 𝐿 ∗ 𝐼 ∗ sin(∅) (1.14) F: Fuerza en Newton I: Intensidad que recorre el conductor en amperios L: Longitud del conductor en metros B: Densidad de campo magnético o densidad de flujo teslas Φ: Ángulo que forma I con B Fuerza contraelectromotriz inducida en un motor Es la tensión que se crea en los conductores de un motor como consecuencia del corte de las líneas de fuerza. La polaridad de la tensión en los generadores es opuesta a la aplicada en los bornes del motor. Durante el arranque de un motor de corriente continua se producen fuertes picos de corriente ya que, al estar la máquina parada, no hay fuerza contraelectromotriz y el bobinado se comporta como un simple conductor de baja resistencia. La fuerza contraelectromotriz en el motor depende directamente de la velocidad de giro del motor y del flujo magnético del sistema inductor. Número de escobillas Las escobillas deben poner en cortocircuito todas las bobinas situadas en la zona neutra. Si la máquina tiene dos polos, tenemos también dos zonas neutras. En consecuencia, el número total de delgas ha de ser igual al número de polos de la máquina. En cuanto a su posición, será coincidente con las líneas neutras de los polos. En realidad, si un motor de corriente continua en su inducido lleva un bobinado imbricado, se deberán poner tantas escobillas como polos tiene la máquina, pero si en su inducido lleva un bobinado ondulado, como solo existen dos trayectos de corriente paralela dentro de la máquina, en un principio. 16.
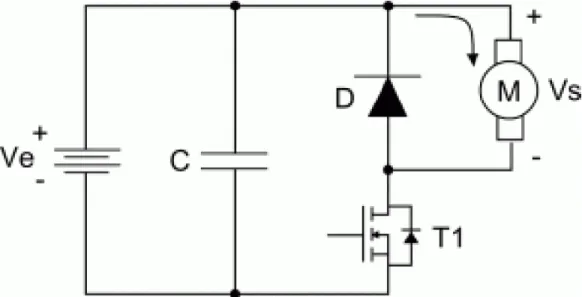
(24) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. es suficiente colocar dos escobillas, aunque si se desea se pueden colocar tantas escobillas como polos. Sentido de giro En máquinas de corriente directa de mediana y gran potencia, es común la fabricación de rotores con láminas de acero eléctrico para disminuir las pérdidas asociadas a los campos magnéticos variables, como las corrientes de Foucault y las producidas por histéresis. Reversibilidad Los motores y los generadores de corriente continua están constituidos esencialmente por los mismos elementos, diferenciándose únicamente en la forma de utilización. Por reversibilidad entre el motor y el generador se entiende que si se hace girar el rotor, se produce en el devanado inducido una fuerza electromotriz capaz de transformarse en energía eléctrica. En cambio, si se aplica una tensión continua al devanado inducido del generador a través del colector delga, el comportamiento de la máquina ahora es de motor, capaz de transformar la fuerza contraelectromotriz en energía mecánica. En ambos casos el inducido está sometido a la acción del campo magnético del inductor principal en el estator. [11] 1.1.3. Control de Velocidad.. La solución más habitual es el uso de reductores de voltaje (step-down) para regular la velocidad de estos motores, como vemos en la figura 1.12, en el cual se realiza mediante la modulación de ancho de pulso (PWM) de la señal de encendido en el transistor T1, donde funciona como interruptor, donde el paso de corriente se corta a altas frecuencias.. Figura 1.12: Circuito reductor de V aplicado al control de velocidad de un motor de CC.. 17.
(25) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Debido a la naturaleza inductiva de los enrollados del motor, necesitaremos añadir un diodo en paralelo, con esto conseguimos la circulación de corriente mientras el transistor no conduce, y evitamos sobretensiones de potencia. Para terminar, el condensador proporciona altas corrientes en periodos cortos de tiempo en el comienzo e incluso para estabilizar el voltaje Ve. La modulación de ancho de pulso se utiliza para controlar la cantidad de energía que envía a una carga, esto se consigue manejando el tiempo en el que el transistor T1 conduce o el tiempo en que la función es positiva (ancho del pulso). El ciclo de trabajo de una señal periódica es el ancho relativo de su parte positiva en relación con el período. Expresado matemáticamente: 𝑡𝑜𝑛 𝑡𝑜𝑛. 𝛿=. 𝑡𝑜𝑛 +𝑡𝑜𝑓𝑓. =. 𝑇. (1.15). Donde: ton es el tiempo en que la función es positiva (ancho del pulso) toff es el tiempo en que no conduce T es el período de la función Por lo tanto, el voltaje medio del motor (Vs) será:. 𝑉𝑠 = 𝛿 ∗ 𝑉𝑒 (1.16) Podemos realizar el control del ciclo de trabajo mediante circuitos digitales o analógicos, para conseguirlo tenemos la posibilidad de implementar lazos de control, por ejemplo, regulamos la corriente para tener un torque deseado sin que la variable de la velocidad pueda influir. Modulación de Ancho de Pulso- PWM. Esta técnica consiste en trabajar con una señal digital cuadrada, en la cual podemos variar el ciclo de trabajo sin variar la frecuencia. Para un PWM se toma en consideración los siguientes parámetros: • El ciclo de trabajo, D • El tiempo en que la función es positiva (ancho del pulso en alto), 𝜏 • El período de la función, T • El ciclo de trabajo indica el tiempo que la función esta en alto respecto al tiempo total de la señal (periodo). [12] El ciclo de trabajo describe la cantidad de tiempo que la señal está en un estado lógico alto, como un porcentaje del tiempo total que esta toma para completar un ciclo completo. La frecuencia determina con qué rapidez se completa un ciclo, y por lo tanto, con qué velocidad se cambia entre los estados lógicos alto y bajo. Al modificar una señal de estado alto a bajo; en un espacio temporal reducido y con un cierto ciclo de trabajo, la salida parecerá comportarse como una señal analógica constante cuanto está siendo aplicada a algún dispositivo.[13] 18.
(26) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. 1.2. Convertidores de CD-CD. Se llama convertidor CD-CD a un dispositivo que transforma corriente continua de una tensión a otra. Suelen ser reguladores de conmutación, dando a su salida una tensión regulada y, la mayoría de las veces con limitación de corriente. Se tiende a utilizar frecuencias de conmutación cada vez más elevadas porque permiten reducir la capacidad de los condensadores, con el consiguiente beneficio de volumen, peso y precio. Los convertidores se pueden clasificar de acuerdo con la forma en que los mismos se conmutan: • Conmutación natural: El cambio de estado de los interruptores es mediante la frecuencia de la red eléctrica. • Conmutación fuerte: El cambio de estado de los interruptores es determinado por el pulso de gatillo que lo controla • Conmutación suave: La tensión y / o fugas en el momento de la conmutación, que disminuyen las pérdidas asociadas al proceso de conmutación de los interruptores. Electrónica de potencia: El control se realiza a través de transistores que funcionan en las regiones de corte y saturación, reduciendo así las pérdidas. Conmutación forzada El elemento principal de la conmutación son los interruptores estáticos. Todos los interruptores se caracterizan por 2 estados: • El estado cerrado o de conducción (ON) donde existe conducción entre los terminales del interruptor. • El estado abierto o de bloqueo (OFF) donde no hay conducción de corriente entre los terminales del interruptor. Características eléctricas de simetría (direccionalidad) La característica eléctrica de conducción se refiere a los sentidos de conducción que la corriente puede recorrer en su estado cerrado. El dispositivo se dice: • Bidireccional: si la conducción se especifica para ambos sentidos de corriente. • Unidireccional: si la conducción puede ocurrir para un solo sentido de la cadena. Tipos de convertidores CD-CD Son varios los tipos de convertidores CD-CD existentes. Normalmente se clasifican en tres grupos: los que disminuyen la tensión a su salida (convertidor reductor), los que aumentan la tensión a su salida (convertidor elevador) y los que son capaces de realizar ambas funciones. En este trabajo se hará énfasis en el convertidor Buck y Boost (bajada y subida respectivamente). 1.2.1. Conversores Buck y Boost. Estructura y funcionamiento. Conversor Buck. 19.
(27) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. El convertidor Buck (o reductor) es un convertidor de potencia, CD/CD sin aislamiento galvánico, que obtiene a su salida un voltaje continuo menor que a su entrada. El diseño es similar a un convertidor elevador o Boost, también es una fuente conmutada con dos dispositivos semiconductores (transistor S y diodo D), un inductor L y opcionalmente un condensador C a la salida. La forma más simple de reducir una tensión continua (CD) es usar un circuito divisor de tensión, pero los divisores gastan mucha energía en forma de calor. Por otra parte, un convertidor Buck puede tener una alta eficiencia (superior al 95% con circuitos integrados) y autorregulación.. Figura 1.13: Esquema básico de un convertidor Buck.. La relación de tensión entre la entrada y salida puede ser encontrada calculando el valor medio de la tensión en la inductancia en un período, que en régimen permanente debe ser cero, entonces: 𝑡𝑜𝑛 𝑇𝑠 1 𝑇𝑠 𝑣 𝑑𝑡 = 0 → 𝑣 𝑑𝑡 + 𝑣 𝑑𝑡 = 0 (1.17) ∫ ∫ ∫ 𝐿 𝐿 0 𝑡𝑜𝑛 𝐿 𝑇𝑠 0 𝑉0 𝑡 = 𝑜𝑛 = 𝐷𝑠𝑤 (1.18) 𝑉 𝑇 𝑑. 𝑠. El funcionamiento del conversor Buck es sencillo, consta de un inductor controlado por dos dispositivos semiconductores los cuales alternan la conexión del inductor bien a la fuente de alimentación o bien a la carga. Las dos configuraciones de un Buck dadas en la figura 1.14 tenemos: Primer caso la energía se transfiere de la fuente a la bobina al condensador y a la carga. Segundo caso la energía se transfiere de la bobina y el condensador a la carga. [14]. 20.
(28) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.14: Estados del convertidor Buck.. Conversor Boost El convertidor Boost (o elevador) es un convertidor CD a CD que obtiene a su salida una tensión continua mayor que a su entrada. Es un tipo de fuente de alimentación conmutada que contiene al menos dos interruptores semiconductores (diodo y transistor), y al menos un elemento para almacenar energía (condensador, bobina o combinación de ambos). Frecuentemente se añaden filtros construidos con inductores y condensadores para mejorar el rendimiento. Un conector de suministro de energía habitual no se puede conectar directamente a dispositivos como ordenadores, relojes o teléfonos. La conexión de suministro genera una tensión alterna (CA) y los dispositivos requieren tensiones continuas (CD). La conversión de potencia permite que dispositivos de continua utilicen energía de fuentes de alterna, este es un proceso llamado conversión CA a CD y en él se usan convertidores CA a CD como rectificadores. La energía también puede provenir de fuentes CD como baterías, paneles solares, rectificadores y generadores CD, pero ser de niveles inadecuados. El proceso de cambiar una tensión de continua a otra diferente es llamado conversión CD a CD. Un convertidor Boost es uno de los tipos de convertidores CD a CD. Presenta una tensión de salida mayor que la tensión de la fuente, pero la corriente de salida es menor que la de entrada. El principio básico del convertidor Boost consiste en dos estados distintos dependiendo del estado del interruptor S como se muestra en la figura 1.15: Primer caso la energía se transfiere de la fuente a la bobina y del condensador a la carga y segundo caso la energía se transfiere de la fuente y de la bobina al condensador y a la carga.. 21.
(29) Capítulo 1: Aspectos teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de CD. Figura 1.15: Estados del convertidor Buck.. . Cuando el interruptor está cerrado (On-state) la bobina L almacena energía de la fuente, a la vez la carga es alimentada por el condensador C. Cuando el interruptor está abierto (Off-state) el único camino para la corriente es a través del diodo D y circula por el condensador (hasta que se carga completamente) y la carga. La relación de tensión entre la entrada y salida puede ser encontrada calculando el valor medio de la tensión en la inductancia en un período, que en régimen permanente debe ser cero, entonces: [15] 𝑡𝑜𝑛 𝑇𝑠 1 𝑇𝑠 𝑣 𝑑𝑡 = 0 → 𝑣 𝑑𝑡 + 𝑣 𝑑𝑡 = 0 (1.19) ∫ ∫ ∫ 𝐿 𝐿 0 𝑡𝑜𝑛 𝐿 𝑇𝑠 0 𝑉0 1. 𝑉𝑑. =. 1−𝐷𝑠𝑤. (1.20). Conclusiones parciales del capitulo: La fundamentación de los referentes teóricos relacionados con los modelos matemáticos de las máquinas y reguladores de corriente directa demostró que existe una amplia bibliografia sobre el tema que puede ser utilizado para el control vectorial de motores de CD, ademas se explican sus partes, aspectos constructivos, clasificación y funcionamiento de estas máquinas. [14]. 22.
(30) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. CAPÍTULO 2. MODELADO MATEMÁTICO DEL MOTOR DE CD Y CONVERSORES. IMPLEMENTACIÓN EN MATLAB. En este capítulo se presenta el modelo matemático de un motor de corriente continua y también el de los convertidores Buck y Boost, proyectándolas luego en diagrama de bloques en el programa SIMULINK. Se ha desarrollado el modelo matemático usando ecuaciones diferenciales y a su vez también se desplegó el análisis respectivo en términos de las variables físicas que se tiene en el motor, como en la carga mecánica acoplada al mismo. En la actualidad los métodos de control de velocidad se han ido desarrollando considerablemente y los más comunes son el control de velocidad por corriente de campo y el control de velocidad por corriente de armadura, que son técnicas de control no lineal, haciéndose de principal interés la segunda variante. Para poder analizar estos métodos se requiere del conocimiento físico del sistema, unidades de las constantes que aparecen en el modelo, selección adecuada de las variables de estado y conocimientos de desarrollo de ecuaciones utilizando la transformada de Laplace[16]. La selección de variables no es evidente, sino más bien resulta de la experiencia en el modelado de sistemas eléctricos y mecánicos, y así como de la apropiada selección de constantes físicas como de fricción, inercia y torque eléctrico.[17] 2.1. Modelado matemático del motor de CD.. Puesto que los motores de CD se usan en forma extensa en sistemas de control, es necesario establecer modelos matemáticos de los mismos para propósitos de análisis. Un modelo matemático es un conjunto de ecuaciones que intentan aproximar el efecto que tienen las variables de entrada sobre las variables de salida en un sistema a lo largo del tiempo. Se construyen con la intención de que correspondan tan exactamente como sea posible con el mundo real, más ningún modelo puede ser jamás una réplica exacta de su contraparte real. Un modelo resulta útil en la medida de que sus propiedades corresponden con las del mundo real. El modelo siempre es una aproximación y supone un compromiso entre exactitud y sencillez. [18] El motor a utilizar es un motor de excitación separada, cuya característica principal es la bobina (inductor) que genera el campo magnético no se encuentra dentro del circuito del motor, es decir no existe conexión eléctrica entre el rotor y el estator como se muestra en la siguiente figura:. 23.
(31) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. Figura 2.1: Motor de excitación independiente. El modelado matemático del motor de corriente continua requiere de dos ecuaciones, una ecuación mecánica y otra ecuación eléctrica. Estas ecuaciones están acopladas y se basan en las Leyes de la dinámica y de Kirchhoff, respectivamente. Por una parte, la ecuación mecánica modela principalmente el movimiento del rotor, y por otra parte la ecuación eléctrica modela lo que ocurre en el circuito eléctrico del inducido. Aplicando la ley de Ohm, la tensión útil será: 𝑑 𝑉𝑎 = 𝑅𝑎 𝑖𝑎 + 𝐿𝑎 𝑖𝑎 + 𝑉𝑟𝑜𝑡 (2.1) 𝑑𝑡. 𝑉𝑓 = 𝑅𝑓 𝑖𝑓 + 𝐿𝑓. 𝑑. 𝑖 (2.2) 𝑑𝑡 𝑓. Vf: Voltaje de exitación de campo. Rf: Resistencia del devanado de campo. If: Corriente de campo. Lf: Inductancia de campo. Va: Voltaje de armadura. Ra: Resistencia del devanado de armadura. Ia: Corriente de armadura. La: Inductancia de armadura. Vrot: Voltaje de reacción de armadura. D: Constante de roce. El rotor realizara su movimiento debido al torque electromagnético generado por el campo magnético que se produce en el estator y a su vez este dependerá de la corriente que circula en la armadura. El motor en su movimiento giratorio arrastra una carga, creándose por lo tanto, un par-motor resultante, y a su vez se tiene fricción en el sistema que depende de la velocidad a la cual gira el rotor y este causa un torque que es en sentido opuesto al movimiento, en una sumatoria de torque y se obtiene la siguiente ecuación:. 𝐽. 𝑑 𝑑𝑡. 𝜔𝑚 = 𝑇𝑒𝑙 − 𝑇𝑐𝑎𝑟𝑔𝑎. (2.3). 𝑉𝑟𝑜𝑡 = 𝐺𝑓𝑞 𝐼𝑓 𝜔𝑚 = 𝐾𝑎 ∅𝑑 𝜔𝑚. (2.4). 24.
(32) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. 𝑇𝑒𝑙 = 𝐺𝑓𝑞 𝐼𝑓 𝐼𝑎 = 𝐾𝑎 ∅𝑑 𝐼𝑎. (2.5). Tel: Torque eléctrico. Tcarga: Torque de carga. Gfq: Constante de relación de enlace magnético entre el estator y el rotor. J: Momento de inercia. ωm: Velocidad angular de rotación [rad/seg].. ∅𝑑 = 𝑓(𝑖𝑓 ) (2.6) → Curva de magnetización 2.1.1. Normalmente, intenta mantenerse Φd en el posible valor más grande (viable) para hacer disponible un conjugado elevado. Normalmente, es considerado el Φd/if = cte. Los efectos de ia sobre Φd frecuentemente se desprecia Para operar en las velocidades sobre el nominal, es común reducir Φd. Estado estacionario. Como se mencionaba inicialmente, la máquina de cc se puede conectar de diversas maneras. Para comenzar el estudio de los lazos de control, se considerará un campo constante, es decir V f = cte. Esto genera una corriente de campo constante, por lo que se tiene que 𝐺𝑓𝑞 𝐼𝑓 = 𝐾. En estado estacionario, las derivadas se hacen 0, por lo que las ecuaciones se reducen a las expresiones siguientes:. 𝑉𝑓 = 𝑅𝑓 𝑖𝑓 = 𝑐𝑡𝑒 (2.7) 𝑉𝑎 = 𝑅𝑎 𝑖𝑎 + 𝑉𝑟𝑜𝑡 (2.8) 𝑉𝑟𝑜𝑡 = 𝐾𝜔𝑚 (2.9) 𝑇𝑒𝑙 = 𝐾𝐼𝑎 (2.10) 𝑇𝑒𝑙 − 𝑇𝑐𝑎𝑟𝑔𝑎 = 𝜔𝑚 (2.11) Despejando Ia de 2.8 y reemplazando en 2.10 se tiene: 𝑉 −𝑉 𝑇𝑒𝑙 = 𝐾 𝑎 𝑟𝑜𝑡 (2.12) 𝑅 𝑎. De igual manera, al incluir la ecuación 2.8 en 2.12 y despejando 𝜔 se tiene: 𝑉 𝑅 𝜔 = 𝑎 − 𝑎2 𝑇𝑒𝑙 (2.13) 𝐾 𝐾 El torque eléctrico generado por un motor está determinado por la exigencia de la carga. En estado estacionario se cumple la ecuación 2.11, por lo que finalmente, al reemplazar en 2.13 se tiene:. 25.
(33) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. 𝜔=. 𝐾𝑉𝑎 𝐾2 +𝑅𝑎. −. 𝑅𝑎. 𝑇 (2.14) 𝐾2 +𝑅𝑎 𝑐𝑎𝑟𝑔𝑎. Se puede simplificar a la siguiente expresión: 𝑉𝑎 𝑅𝑎. 𝜔=. −. 𝑇. (2.15). 𝐾 𝐾 2 𝑐𝑎𝑟𝑔𝑎 La ecuación 2.15 describe la relación velocidad torque para un motor de CC excitado con campo constante, y corresponde a una relación lineal entre ambas variables.. Figura 2.2: Relación velocidad torque de un motor de cc de excitación de campo constante.. Claramente esta es una de las tantas posibles curvas de relación velocidad torque, ya que, dependiendo de la conexión del campo, se pueden lograr otras curvas con características diferentes. 2.1.2. Diagrama de Bloques y control de velocidad. Del conjunto de ecuaciones antes descritas, se puede establecer un conjunto de relaciones en bloque que muestran la interacción del sistema.. 26.
(34) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. Figura 2.3: Diagrama de bloques de un motor de CC.. Si se considera Va como la variable de control y ω la variable a controlar, Vrot actúa como perturbación en el lazo. Vrot es el voltaje generado por la reacción de armadura, y para compensarlo habría que utilizar un sistema de control prealimentado. Despreciando el roce viscoso, el diagrama de la figura 2.3 se puede escribir en el plano s. Esto facilita su comprensión y permite una mejor visualización para la implementación de los lazos de control figura 2.4.. Figura 2.4: Diagrama en el plano S de un motor de CC.. Claramente se distinguen dos constantes de tiempo dentro del lazo, siendo una de ellas mucho más rápida que la otra. Se define la constante de tiempo eléctrica como Te=La/Ra que corresponde a la formada por el circuito de armadura, su ganancia Kar=1/Ra, y la constante de tiempo mecánica Tm=J que está relacionada con la inercia. En general, la constante de tiempo relacionada con el circuito de armadura toma valores entre 1[ms] y 100[ms], dependiendo del uso o no de inductores de filtro, debido al riple producido por los drives de alimentación. La constante de tiempo mecánica depende considerablemente del tipo de carga que se trate y en general esta constante puede ir desde 0,1[s] a unos cuantos minutos. Utilizando un esquema de control de velocidad clásico e incorporando la dinámica del sistema de alimentación como un sistema de primer orden con constante de tiempo equivalente Ta y ganancia Ka, se pueden lograr resultados bastante aceptables para el control de la máquina. La constante de tiempo del sistema de alimentación depende mucho del equipo que se utilice, la cual puede ir de unos pocos milisegundos, en el caso de 27.
(35) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. convertidores estáticos, hasta unos cientos de milisegundos, en el caso de generadores rotatorios. La figura 2.5 muestra el diagrama en bloque de un sistema de control clásico que tiene un PI de velocidad en cascada con un PI de corriente considerando la dinámica del actuador. [2]. Figura 2.5: Esquema de control de velocidad clásico.. 2.2. Modelado matemático del conversor Buck. Los modelos matemáticos de estos conversores varían con respecto a sus dos modos de trabajo. A continuación se presentamos modos con sus respectivas ecuaciones a utilizar. Modo continuo El convertidor se dice que está modo continuo si la corriente que pasa a través del inductor (IL) nunca baja a cero durante el ciclo de conmutación. En este modo, el principio de funcionamiento es descrito por el cronograma de la figura 2.6:. Figura 2.6: Evolución de los V y I con el tiempo en un convertidor Buck ideal en modo continuo.. . Con el interruptor cerrado la tensión en el inductor es VL = Vi − Vo y la corriente aumenta linealmente. El diodo está en inversa por lo que no fluye corriente por él. 28.
(36) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. . Con el interruptor abierto el diodo está conduciendo en directa. La tensión en el inductor es VL = − Vo y la corriente disminuye.. La energía almacenada en el inductor es:. 1. 𝐿𝐼2 (2.16) 2 𝐿 Como puede verse la energía almacenada en la bobina se incrementa en estado ON (interruptor cerrado) y se decrementa durante el estado OFF (interruptor abierto). La bobina se usa para transferir energía desde la entrada a la salida. La variación de IL viene dada por: 𝑑𝐼 𝑉𝑙 = 𝐿 𝐿 (2.17) 𝑑𝑡 𝐸=. Con VL igual a Vi – Vo durante el estado a ON y a –Vo durante el estado OFF. El incremento de corriente en ON es: (𝑉 −𝑉 )𝑡 𝑡 𝑡 𝑉 ∆𝐼𝐿𝑜𝑛 = ∫0 𝑜𝑛 𝑑𝐼𝐿 = ∫0 𝑜𝑛 𝐿 𝑑𝑡 = 𝑖 0 𝑜𝑛 (2.18) 𝐿 𝐿 De la misma forma el decremento de corriente en OFF es: 𝑉0 𝑡𝑜𝑓𝑓 𝑡 𝑡 𝑉 ∆𝐼𝐿𝑜𝑓𝑓 = ∫0 𝑜𝑓𝑓 𝑑𝐼𝐿 = ∫0 𝑜𝑓𝑓 𝐿 𝑑𝑡 = − (2.19) 𝐿 𝐿 Si se asume que el convertidor opera en un estado estable, la energía almacenada en cada componente al final del ciclo de conmutación T es igual a que había al principio del ciclo. Esto significa que la corriente IL es igual en t=0 y en t=T. Por lo tanto:. ∆𝐼𝐿𝑜𝑛 + ∆𝐼𝐿𝑜𝑓𝑓 = 0 (2.20) De las ecuaciones anteriores se obtiene: (𝑉𝑖 −𝑉0 )𝑡𝑜𝑛. −. 𝑉0 𝑡𝑜𝑓𝑓. = 0 (2.21). 𝐿 𝐿 Como se puede ver en la figura 1.14: 𝑡𝑜𝑛 = 𝐷𝑇 y 𝑡𝑜𝑓𝑓 = 𝑇 − 𝐷𝑇. D es un escalar llamado ciclo de trabajo (duty cycle) cuyo valor está comprendido entre 0 y 1:. 𝑉0 = 𝐷𝑉𝑖. (2.22). De esta ecuación se puede observar como la tensión de salida del conversor varía linealmente con el ciclo de trabajo para una tensión de entrada dada. Como el ciclo de trabajo D es igual al cociente entre ton y el periodo T no puede ser mayor a 1. Por consiguiente Vo ≤ Vi, de ahí su nombre de reductor. Por ejemplo para regular una tensión de 12 V a 3 V el ciclo de trabajo en un circuito ideal debe ser del 25%. Modo discontinuo En algunos casos la cantidad de energía requerida por la carga es tan pequeña que puede ser transferida en un tiempo menor que el periodo de conmutación; en este caso la corriente a través de la bobina cae a cero durante una parte del periodo. La única diferencia con el 29.
(37) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. funcionamiento descrito antes es que el inductor está completamente descargado al final del ciclo de conmutación figura 2.7. Esto tiene algunos efectos sobre las ecuaciones anteriores.. Figura 2.7: Evolución de los V y I con el tiempo en un convertidor Buck ideal en modo discontinuo.. La energía en el inductor sigue siendo la misma al principio y al final del ciclo (esta vez de valor cero). Esto significa que el valor medio de la tensión del inductor (VL) es cero (el área de los recuadros amarillos y naranjas de la figura es igual). (𝑉𝑖 − 𝑉0 )𝐷𝑇 − 𝑉0 𝛿𝑇 = 0 (2.23) De esta manera el valor de δ es:. 𝛿=. 𝑉𝑖 −𝑉0. 𝐷. (2.24). 𝑉0 La corriente de salida entregada a la carga (Io) es constante. También se supone que capacidad del condensador de salida es suficientemente alta para mantener constante nivel de tensión en sus terminales durante un ciclo de conmutación. Esto implica que corriente que pasa a través del condensador tiene como valor medio cero, así que corriente media en la bobina será igual a la corriente de salida:. la el la la. 𝐼𝐿 = 𝐼0 (2.25) La corriente en el inductor es cero al principio y aumenta durante ton hasta llegar a ILmax. Esto significa que ILmax es igual a: 𝑉 −𝑉 𝐼𝐿𝑚𝑎𝑥 = 𝑖 0 𝐷𝑇 (2.26) 𝐿 Sustituyendo el valor de ILmax en la ecuación 1.26 y sustituyendo δ por la expresión dada: 1 𝑉0 = 𝑉𝑖 2𝐿𝐼0 (2.27) +1 2 𝐷 𝑉𝑖 𝑇. Como se puede ver la tensión de salida de un convertidor Buck en modo discontinuo es más complicada que su contraparte en modo continuo. Además la tensión de salida es función no sólo de la tensión de entrada (Vi) y el ciclo de trabajo (D), sino también del valor de la bobina (L), el periodo de conmutación (T) y la corriente de salida (Io). 30.
(38) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. La transferencia en tensión justifica el nombre step-down por el hecho de que la tensión en la salida puede ser regulada a partir de la tensión de entrada, solamente reduciendo ese valor hasta cero. [19] 2.3. Modelado matemático del conversor Boost. Al igual que el convertidor anterior existen dos situaciones de funcionamiento: Modo continuo (toda la energía se transfiere a la carga, sin llegar a que la corriente se anule), y Modo Discontinuo (la carga consume menos de lo que el circuito puede entregar en un ciclo). . Modo continuo: Cuando un convertidor Boost opera en modo continuo, la corriente a través del inductor (IL) nunca llega a cero. La figura 2.8 muestra las formas de onda típicas de corrientes y voltajes de un convertidor operando en este modo.. Figura 2.8: Formas de onda de I y V en un convertidor Boost operando en modo continuo. El voltaje de salida se puede calcular como sigue, en el caso de un convertidor ideal (es decir, que usa componentes con comportamiento ideal), operando en condiciones estacionarias: Durante el estado ON, el conmutador S está cerrado, lo que hace que el voltaje de entrada (Vi) aparezca entre los extremos del inductor, lo que causa un cambio de corriente (I L) a través del mismo durante un período (t), según la fórmula: ∆𝐼𝐿 𝑉𝑖. =. (2.28). ∆𝑡 𝐿 Al final del estado ON, el incremento en corriente a través del inductor es: 31.
(39) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. 𝐷𝑇 𝑉𝑖. ∆𝐼𝐿𝑜𝑛 = ∫0. 𝑑𝑡 =. 𝑉𝑖 𝐷𝑇. (2.29). 𝐿 𝐿 D es el ciclo de trabajo (factor activo), que representa la fracción del periodo T durante el cual el conmutador S está ON. Por tanto, D varía entre 0 (S siempre OFF) y 1 (S siempre ON). Durante el estado OFF, el conmutador S está abierto, y la corriente del inductor fluye a través de la carga. Si consideramos que no hay caída de tensión en el diodo (necesario para que el condensador no devuelva corriente hacia atrás), y un condensador suficientemente grande en voltaje para mantener este constante, la evolución de IL es: 𝑑𝐼 𝑉𝑖 − 𝑉0 = 𝐿 𝐿 (2.30) 𝑑𝑡 Por tanto, la variación de IL durante el periodo OFF es:. (1−𝐷)𝑇 (𝑉𝑖 −𝑉0 ) 𝑑𝑡. ∆𝐼𝐿𝑜𝑓𝑓 = ∫0. 𝐿. =. (𝑉𝑖 −𝑉0 )(1−𝐷) 𝑇 𝐿. (2.31). Si consideramos que el convertidor opera en condiciones estacionarias, la cantidad de energía almacenada en cada uno de sus componentes, debe ser la misma al principio y al final del ciclo completo de conmutación. En particular, la energía almacenada en el inductor está dada por: 1 𝐸 = 𝐿𝐼𝐿2 (2.32) 2 Así pues, es obvio que la corriente de inductor tiene que ser la misma al principio y al final del ciclo de conmutación. Esto puede ser expresado como:. ∆𝐼𝐿𝑜𝑛 + ∆𝐼𝐿𝑜𝑓𝑓 = 0 (2.33) Sustituyendo: 𝑉0. =. 1. (2.34). 𝑉𝑖 1−𝐷 Lo que nos dice que el factor activo ("duty cycle") es: 𝑉𝑖. 𝐷 =1−. (2.35). 𝑉0 De esta expresión, se puede ver que el voltaje de salida es siempre mayor que el de entrada (ya que el factor activo D va entre 0 y 1), y que se incrementa con D, teóricamente hasta el infinito según D se acerca a 1. Esto es por lo que normalmente este convertidor a veces se llama "step-up converter" (convertidor que sube un escalón). Modo discontinuo En algunas situaciones, la cantidad de energía requerida por la carga es suficientemente pequeña como para ser transferida en un tiempo menor que el tiempo total del ciclo de conmutación. En este caso, la corriente a través del inductor cae hasta cero durante parte del periodo. La única diferencia en el principio descrito antes para el modo continuo, es que 32.
(40) Capítulo 2: Modelado matemático del motor de CD y conversores. Implementación en MATLAB.. el inductor se descarga completamente al final del ciclo de conmutación. En la figura 2.9 se ven las formas de ondas.. Figura 2.9: Formas de onda de I y V en un convertidor Boost operando en modo discontinuo.. Sin embargo, esta pequeña variación en el funcionamiento, tiene un fuerte efecto en la ecuación del voltaje de salida, que puede calcularse como sigue: Como la corriente del inductor al principio del ciclo es cero, su máximo valor ILmax (en el tiempo t=DT) es: 𝑉 𝐷𝑇 𝐼𝐿𝑚𝑎𝑥 = 𝑖 (2.36) 𝐿 Durante el tiempo OFF, IL cae hasta cero después de un tiempo δT: (𝑉 −𝑉 )𝛿𝑇 𝐼𝐿𝑚𝑎𝑥 + 𝑖 0 = 0 (2.37) 𝐿 Usando las dos ecuaciones previas, δ es:. 𝛿=. 𝑉𝑖 𝐷. (2.38). 𝑉0 −𝑉𝑖 La corriente de carga Io es igual a la corriente media del diodo (ID). Como se puede observar en la figura 2.9, la corriente del diodo es igual a la corriente del inductor durante el estado OFF. Por tanto, la corriente de salida puede escribirse como: 𝐼𝐿 𝐼𝑜 = 𝐼𝐷 = 𝑚𝑎𝑥 𝛿 (2.39) 2 Reemplazando ILmax y δ por sus expresiones respectivas tenemos:. 𝐼𝑜 =. 𝑉𝑖 𝐷𝑇 𝑉𝑖 𝐷. =. 𝑉𝑖2 𝐷2 𝑇. 2𝐿 𝑉0 −𝑉𝑖 2𝐿(𝑉0 −𝑉𝑖 ) Por tanto, la ganancia del voltaje de salida es: 𝑉0 𝑉𝑖 𝐷 2 𝑇 𝑉𝑖. =1+. 2𝐿𝐼0. (2.40). (2.41). 33.
Figure




+7





Documento similar
Se consideran aprobadas con anterioridad las materias cursadas de acuerdo con el currículo regulado por la LOE con una calificación igual o superior a 5, que tengan
La combinación, de acuerdo con el SEG, de ambos estudios, validez y fiabilidad (esto es, el estudio de los criterios de realidad en la declaración), verificada la
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Luis Miguel Utrera Navarrete ha presentado la relación de Bienes y Actividades siguientes para la legislatura de 2015-2019, según constan inscritos en el
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
