Estudio de la dinámica de tracción de un vehículo eléctrico
33
0
0
Texto completo
(2) Contenido 1. INTRODUCCIÓN ....................................................................................................................... 7 2. OBJETIVOS ............................................................................................................................... 8 OBJETIVO GENERAL .................................................................................................................... 8 OBJETIVOS ESPECÍFICOS ............................................................................................................. 8 3. CAPÍTULO 1 ............................................................................................................................. 9 4. 1. ........... ANÁLISIS DE MODELOS PARA LA DINÁMICA DE TRACCIÓN DE VEHÍCULOS ELÉCTRICOS ................................................................................................................................................ 9 1.1 Modelo 1. Aportación y Apropiación de Metodologías de desarrollo de Vehículos para Recreación tipo Buggy [1]. .......................................................................................................... 9 1.1.1.. Fuerza de tracción Ft ............................................................................................. 10. 1.1.2.. Fuerza de resistencia aerodinámica Fw .................................................................. 10. 1.1.3.. Fuerza de inercia Fjx .............................................................................................. 10. 1.1.4.. Resistencia al ascenso Fi........................................................................................ 10. 1.1.5.. Resistencia a la rodadura Ff ................................................................................... 10. 1.1.6.. Resistencia total del camino fΨ .............................................................................. 10. 1.1.7.. Potencia requerida................................................................................................ 11. 5. 1.2. ................................................................ Modelo 2. Fundamentals of Vehicle Dynamics [2] .............................................................................................................................................. 12 1.2.1.. Aceleración limitada por la tracción ...................................................................... 14. 1.2.2.. Resistencia a la rodadura ...................................................................................... 14. 1.2.3.. Fuerza aerodinámica ............................................................................................. 18. 1.2.4.. Fuerza según la pendiente .................................................................................... 19. 1.3.. Modelo 2. DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO SOLAR HÍBRIDO [3] ................. 20. 1.3.1.. Cargas resistivas del vehículo en movimiento ........................................................ 20. 6. Capítulo 2 .............................................................................................................................. 27 2.1.. Selección del modelo .................................................................................................... 27. 2.1.1.. Potencia requerida por el vehículo ........................................................................ 28. 2.1.2.. Par motriz ............................................................................................................. 30. 7. Conclusiones ......................................................................................................................... 32 8. Referencias............................................................................................................................ 33.
(3) LIST A DE FIGURAS. Figura 1 Árbol de objetivos planteados para el proyecto ......................................... 7 Figura 2 Cargas debida al peso y centro de gravedad [1] ....................................... 9 Figura 3 Fuerzas arbitrarias actuando en un vehículo........................................... 12 Figura 4 . Temperatura relativa del neumático y resistencia a la rodadura durante el arranque. ............................................................................................................... 15 Figura 5. Coeficiente de resistencia a la rodadura versus presión de inflado........ 15 Figura 6 Resistencia al rodamiento versus velocidad............................................ 16 Figura 7 Coeficientes de la ecuación 1.27 [2]........................................................ 17 Figura 8 Coeficientes de resistencia de varios cuerpos. [2] .................................. 19 Figura 9 Fuerza de rodadura ................................................................................. 21 Figura 10 Lineas de flujo de aire en un vehiculo ................................................... 22 Figura 11 Fuerzas resistivas de cada modelo ....................................................... 25 Figura 12 Comparación de potencia exigida por cada fuerza en función de la velocidad y a diferentes pendientes ...................................................................... 29 Figura 13 Curva del torque que entrega el motor 3CG401.................................... 30 Figura 14 Potencia entregada por el motor 3CG401 ............................................. 31.
(4) Lista de tablas. Tabla 1 Valores típicos de coeficientes de rodadura [2] ........................................ 17 Tabla 2 coeficientes de rodadura para diferentes superficies ............................... 21 Tabla 3 Síntesis de la dinámica de según distintos autores tracción .................... 24 Tabla 4 Parámetros del vehículo ........................................................................... 27.
(5) Nomenclatura Ft. Fuerza de tracción. Fw. Fuerza de resistencia aerodinámica. Fjx. Fuerza de inercia. Fi. Fuerza de inercia. Ff. Resistencia a la rodadura. Kw. Coeficiente de resistencia al aire. Aw. Área frontal del automóvil. bw. Ancho. hw. Altura. V. velocidad del vehículo. δ. Coeficiente de consideración de las masas rotatorias. ma. Masa total del vehículo. θ. Ángulo de la pendiente. f. Coeficiente de rodadura. Ga. Peso total de vehículo. P. Potencia del motor necesaria para el desplazamiento del automóvil. Me(max) Máximo momento desarrollado por el motor para su característica externa. u(inferior) Relación de transmisión del cambio más bajo de la caja de marchas. up:. Relación de transmisión.. u0:. Relación de la transmisión final.. ωmax. velocidad máxima del cigüeñal.. re. Radio efectivo de rodadura del neumático.. ualta. Relación de transmisión del cambio más alto de la caja de marchas.. Vmax. velocidad máxima..
(6) ηt. Eficiencia mecánica de la transmisión.. i. inclinación del camino. M. Mass of the vehicle = W/g. ax. Aceleración longitudinal. Fx. Fuerza de tracción en el suelo. Rx. Fuerza de resistencia de rodadura. DA. Fuerza de resistencia aerodinámica. Rhx. Fuerza de enganche (remolque). µ. Pico de coeficiente de fricción.. W. Peso en ruedas motrices. 𝑓𝑟. Coeficiente de resistencia de rodadura. Rx. Fuerza de resistencia a la rodadura. W. Peso en la rueda. C. Pérdida reflectante constante y características elásticas del material del neumático.. D. Diámetro exterior. ht. Altura de la sección del neumática. w. Ancho de la sección del neumático. fo. Coeficiente básico. fs. Coeficiente de efecto de velocidad. CD. coeficientes de resistencia aerodinámica. A. Área frontal del vehículo. Ρ. Densidad del aire. S. Sección transversal del vehículo perpendicular a la dirección del viento.. Ka. Coeficiente de penetración aerodinámica..
(7) INTRODUCCIÓN. El grupo de investigación de Tecnología Mecánica se encuentra trabajando en el proyecto DISEÑO Y CONSTRUCCIÓN VIRTUAL DE UN VEHÍCULO ELÉCTRICO, el cual busca desempeñar una aplicación utilitaria de transporte de carga o pasajeros; Teniendo en cuenta el árbol de objetivos planteado para el proyecto (ver figura 1), es necesario trabajar cada uno de los sistemas que conforman un vehículo por separado.. Figura 1 Árbol de objetivos planteados para el proyecto. En el proyecto se busca desarrollar un modelo teórico que facilite el cálculo de la potencia que el motor del vehículo necesitará, teniendo en cuenta las condiciones del terreno, para así poder seleccionar el tipo de motor eléctrico indicado. En la expresión se tendrán en cuenta las diferentes fuerzas que se le aplican al vehículo, como son, la fuerza aerodinámica, la fuerza que se obtiene debido a la pendiente, la fuerza de rodadura y la fuerza debida a la aceleración. La idea del diseño de un vehículo utilitario eléctrico es con el fin de que las empresas colombianas cambien sus vehículos utilitarios de motores de combustión a vehículos con motor eléctrico, esto ayudará a disminuir un poco el daño que a diario se le causa al medio ambiente. Con el modelo hallado se podrá comparar el comportamiento de la potencia debido a cada fuerza en función de la velocidad y debido a la pendiente en que se encuentre el vehículo. El documento constará de 2 partes (capítulos), en el primer capítulo se darán los parámetros establecidos para el vehículo y se hablará de 3 modelos teóricos que proponen diferentes autores, serán estudiados cada uno según los parámetros establecidos para el vehículo y las condiciones del terreno..
(8) En el segundo capítulo se harán los respectivos cálculos con cada uno de los modelos, mostrando resultados con gráficas para poder comprarlos y seleccionar el más adecuado para el vehículo. OBJETIVOS OBJETIVO GENERAL Desarrollar un modelo teórico que permita el análisis de la dinámica de tracción de un vehículo utilitario. OBJETIVOS ESPECÍFICOS ● ● ● ● ●. Establecer y definir los componentes de carga que influyen en la potencia de un vehículo. Establecer los modelos teóricos que definen la potencia y el par de un vehículo en movimiento. Generar una aplicación computacional que permita la aplicación de los modelos planteados. Comparar los diferentes modelos propuestos mediante cruces de curvas del modelo con las curvas de desempeño de modelos comerciales. Validar el modelo con los parámetros propios del vehículo utilitario base del proyecto..
(9) CAPÍTULO 1 1. ANÁLISIS DE MODELOS PARA LA DINÁMICA DE TRACCIÓN DE VEHÍCULOS ELÉCTRICOS En este capítulo se va a hablar de los modelos teóricos que se tienen como opción para el cálculo de la potencia requerida por el vehículo eléctrico, se analizarán las componentes que tiene en cuenta la dinámica de tracción de cada autor para poder elegir el modelo teórico indicado para el vehículo de carga eléctrico. Los análisis de dinámica de tracción de los libros que se han estudiado hablan del caso más general que es cuando el vehículo va transitando en un camino con una inclinación α, como se muestra en la figura 2, Donde actúan diferentes fuerzas resistivas mientras el vehículo este en aceleración. Cada fuerza depende de diferentes factores, como la velocidad, el peso, la pendiente del camino, coeficiente de rodadura según el estado de la carretera, de la rueda, según el área frontal que proyecte el vehículo se dará un factor aerodinámico, la densidad del aire y la aceleración del vehículo, cada autor maneja este ultimo de factor de diferentes maneras. 1.1 Modelo 1. Aportación y Apropiación de Metodologías de desarrollo de Vehículos para Recreación tipo Buggy [1].. Para empezar, se va a hablar del modelo que uso el ngeniero Gabriel Calle Trujillo en la Aportación y Apropiación de Metodologías de desarrollo de Vehículos para Recreación tipo Buggy.. Figura 2 Cargas debida al peso y centro de gravedad [1]. Este esquema de fuerzas, el ingeniero Gabriel lo determina por la siguiente ecuación de equilibrio:.
(10) 1.1.1. Fuerza de tracción Ft Donde se tiene:. 𝐹𝑡 = 𝐹𝑤 + 𝐹𝑗𝑥 + 𝐹𝑖 + 𝐹𝑓. (1.1). Es el resultado de la transmisión del momento desarrollado por el motor, en régimen estable. 1.1.2. Fuerza de resistencia aerodinámica Fw La cual influye de manera significativa en las propiedades de velocidad del automóvil especialmente a altas velocidades. Fw = K w ∗ A w ∗ V 2. (1.2). 1.1.3. Fuerza de inercia Fjx Fuerza de inercia o fuerza de D´Alembert, llamada comúnmente, resistencia a la aceleración longitudinal del vehículo. 𝐹𝑗𝑥 = 𝛿 ∗ 𝑚𝑎 ∗ 𝑔. (1.3). 1.1.4. Resistencia al ascenso Fi Es la componente de fuerza gravitacional del automóvil, dirigida paralela a la superficie de apoyo y aplicada en el centro de masas. 𝐹𝑖 = 𝑚𝑎 ∗ 𝑔 ∗ 𝑠𝑖𝑛𝜃. (1.4). 1.1.5. Resistencia a la rodadura Ff Se introduce de manera convencional y por conveniencia en vez del momento de resistencia a la rodadura. 𝐹𝑓 = 𝑓 ∗ 𝑚𝑎 ∗ 𝑔. (1.5). 1.1.6. Resistencia total del camino f Ψ Por conveniencia se calcula como la suma de la resistencia a la rodadura y la resistencia al ascenso: 𝐹𝛹 = 𝐹𝑓 + 𝐹𝑖 = (ƒ + 𝑠𝑖𝑛𝛼) ∗ 𝑚𝑎 ∗ 𝑔 = 𝛹 ∗ 𝑚𝑎 ∗ 𝑔. (1.6). Dónde: Ψ = ƒ+sinα y se denomina coeficiente o factor de resistencia total del camino y ma * g= Ga que es el peso total del vehículo..
(11) Al sumar todas las fuerzas, esto es lo que queda: 𝐹𝑡 = 𝐾𝑤 ∗ 𝐴𝑤 ∗ 𝑉 2 + 𝑓 ∗ 𝑚𝑎 ∗ 𝑔 + 𝑚𝑎 ∗ 𝑔 ∗ 𝑠𝑖𝑛𝛼 + 𝛿 ∗ 𝑚𝑎 ∗ 𝑔. (1.7). Se factoriza la resistencia a la rodadura con la resistencia al ascenso: 𝐹𝑡 = 𝐾𝑤 ∗ 𝐴𝑤 ∗ 𝑉 2 + 𝑚𝑎 ∗ 𝑔 ∗ (ƒ + 𝑠𝑖𝑛𝛼). (1.8). Y como Ψ = ƒ+sinα y ma*g = Ga, entonces: 𝐹𝑡 = 𝐺𝑎 ∗ 𝛹 + 𝐾𝑤 ∗ 𝐴𝑤 ∗ 𝑉 2. (1.9). Se puede observar que la fuerza debida a la inercia desaparece y es porque, este modelo es una aproximación de la dinámica de arranque del vehículo que no refleja completamente el comportamiento del vehículo, ya que no se tienen en cuenta los fenómenos transitorios que ocurren en el proceso de aceleración [1]. 1.1.7. Potencia requerida Para la selección del motor, Gabriel, utilizó la siguiente expresión, que es la fuerza de tracción resultante anteriormente multiplicada con la velocidad máxima del vehículo, donde la velocidad será la única variante: 𝑃=. 2 𝑉𝑚𝑎𝑥 (𝐺𝑎∗𝛹𝑣 + 𝐾𝑤 ∗𝐴𝑤 ∗𝑉𝑚𝑎𝑥 ). (1.10). 𝜂𝑡. Aunque inicialmente se mencionó que los modelos trabajan sobre un caso general, que es cuando la carretera tiene una pendiente α, se puede notar que el modelo utilizado no tiene en cuenta la componente de fuerza gravitacional (𝐹𝑖 = 𝑚𝑎 ∗ 𝑔 ∗ 𝑠𝑖𝑛𝜃), ya que después de la selección del motor se calcula la máxima pendiente que el vehículo puede superar, esta fuerza se calcula de la siguiente manera: Primero se determina el máximo valor de fuerza de tracción: 𝑓𝑇𝑚𝑎𝑥 =. 𝑀𝑒(𝑚𝑎𝑥)∗𝑢𝑝∗𝑢(𝑖𝑛𝑓𝑒𝑟𝑖𝑜𝑟)∗𝑢0∗Ƞ𝑡. u0=. 𝑟𝑒 𝜔max∗ 𝑟𝑒. (1.11) (1.12). 𝑢𝑝∗ 𝑢𝑎𝑙𝑡𝑎 ∗ 𝑣𝑚𝑎𝑥. Con la siguiente expresión se determina la máxima inclinación: 𝐹𝑡𝑚𝑎𝑥 = ( 𝑓 + 𝑖𝑚𝑎𝑥 ) ∗ 𝑚𝑎 ∗ 𝑔. (1.13). Donde: f : Coeficiente de resistencia del camino. i : inclinación del camino, donde: sinα≈i; 𝑖 𝑚𝑎𝑥 =. ( 𝐹𝑡𝑚𝑎𝑥) 𝑚𝑎∗𝑔. −𝑓. (1.14).
(12) Para el vehículo propuesto en este proyecto será complicado utilizar esta ecuación para hallar la máxima inclinación que el motor puede superar, ya que esta ecuación depende de las relaciones de transmisión y este es un vehículo con motor eléctrico, lo que significa que no tendrá eficiencias de las relaciones de transmisión. 1.2.. Modelo 2. Fundamentals of Vehicle Dynamics [2]. El autor del libro Fundamentals of vehicle Dynamics habla de la aplicación de la segunda ley de Newton para determinar las cargas por cada eje de un vehículo bajo condiciones arbitrarias, dice que la carga de cada eje afecta la aceleración del vehículo, la gravedad, la velocidad máxima y la barra de remolque. A continuación, se muestra la mayoría de fuerzas significativas.. Figura 3 Fuerzas arbitrarias actuando en un vehículo. Donde: W: es el peso del vehículo actuando en el centro de gravedad. W/g*ax: efecto de fuerza inercial, se presenta cuando el vehículo está acelerando sobre la carretera, es conocida como, fuerza Alembert [3] y se representa en dirección opuesta a la aceleración. W f y W r : fuerza normal que experimentan las llantas de los vehículos con la carretera, representando el peso dinámico llevado a las llantas traseras y delanteras. Fxf , Fxr : fuerzas de tracción y Rxf , Rxr resistencia a la rodadura. DA : fuerza aerodinámica que actúa en el cuerpo del vehículo. Puede ser representada como un punto sobre el suelo indicada por una altura h. Rhz , Rhx : son fuerzas verticales y longitudinales actuando en el punto de enganche cuando el vehículo está remolcando un tráiler. El libro Fundamentals of Vehicle Dynamics, habla de realizar una sumatoria de torques aplicada en el punto A para hallar las cargas en el eje frontal y trasero. Al hallar el peso en el eje frontal y trasero se sabe en qué porcentaje se divide el peso en cada eje..
(13) 𝑊𝑓 𝐿 + 𝐷𝐴 ℎ𝑎 +. 𝑊 𝑔. 𝑎𝑥 ℎ + 𝑅ℎ𝑥 ℎℎ + 𝑅ℎ𝑧 𝑑ℎ + 𝑊 ℎ 𝑠𝑖𝑛𝛩 – 𝑊𝑐 𝑐𝑜𝑠𝛩 = 0. (1.15). Mientras el vehículo este en inclinación el mayor porcentaje de peso estará en el eje trasero. 𝑊𝑓 = 𝑊𝑓 =. 𝑊 𝑎 𝑔 𝑥. 𝑊𝑐 𝑐𝑜𝑠𝛩− 𝑅ℎ𝑥 ℎℎ−𝑅ℎ𝑧𝑑ℎ −. ℎ−𝐷𝐴 ℎ𝑎 −𝑊 ℎ 𝑠𝑖𝑛𝛩. 𝐿 𝑊 𝑔. 𝑊 𝑏 𝑐𝑜𝑠𝛩+ 𝑅ℎ𝑥 ℎℎ+𝑅ℎ𝑧(𝑑ℎ +𝐿)+ 𝑎𝑥ℎ+𝐷𝑎 ℎ𝑎+𝑊ℎ 𝑠𝑖𝑛𝜃 𝐿. (1.16) (1.17). 𝑊𝑓 = (−𝐷𝐴 ℎ𝑎 ) Cuando el vehículo está estático y la carretera tiene una pendiente cero, esto significa que la velocidad será cero, entonces las variables que dependen de esta se anulan, como, Rhx, Rhz , a x y DA y el peso se distribuye por igual en los dos ejes ya que las distancias c y b son iguales. 𝑊𝑐. 𝑊𝑓𝑠 = 𝑊𝑟𝑠 = •. (1.18). 𝐿 𝑊𝑏. (1.19). 𝐿. Cargas en grados. La influencia del grado de la pendiente es un valor considerado. El grado es definido como el aumento de la carretera [ pag 13]. Esa relación es la tangente del ángulo de pendiente. Los grados comunes en carreteras interestatales están limitados a 4% siempre que sea posible. En carreteras primarias y secundarias ocasionalmente ellos alcanzan entre 10% y 12%. los cosenos de ángulos pequeños son muy cercanos a uno, y el seno está muy. cerca del ángulo mismo. Es decir: CosΘ=0.99+≡ 1 SenΘ≡ Θ Por lo tanto, la carga de los ejes influenciado por los grados será: 𝑐. ℎ. W f = W (𝐿 – 𝐿 Θ) = W fs – W 𝑏. ℎ. 𝐿. 𝐿. Wr = W ( +. Θ) = W rs – W. ℎ 𝐿 ℎ 𝐿. Θ. (1.20). Θ. (1.21). El autor Guillespie plantea la siguiente ecuación donde se consideran todas las fuerzas de la figura 3. Esta ecuación es obtenida de la segunda ley de Newton. 𝑀𝑎𝑥 =. 𝑤 𝑔. 𝑎𝑥 = 𝐹𝑥 − 𝑅𝑥 − 𝐷𝐴 − 𝑅ℎ𝑥 − 𝑊𝑠𝑖𝑛𝜃. (1.22).
(14) El autor menciona una fuerza de enganche (Rhx) que no se tendrá en cuenta en este análisis de modelos. 1.2.1. Aceleración limitada por la tracción Asumiendo que el motor tiene una potencia adecuada, la aceleración puede ser limitada por el coeficiente de fricción entre el neumático y la carretera. En este caso Fx está limitado por: 𝐹𝑥 = µ𝑊. (1.23). Gillespie resalta que el peso en una rueda motriz depende de la carga estática más la dinámica debido a la aceleración.. 1.2.2. Resistencia a la rodadura La resistencia a la rodadura siempre se opone al movimiento del vehículo, ayudando así al momento de frenar. La fuerza de resistencia a la rodadura es: 𝑅𝑥𝑓 + 𝑅𝑥𝑟 = 𝑓𝑟 (𝑊𝑓 + 𝑊𝑟 ) = 𝑓𝑟 𝑊. (1.24). El parámetro 𝑓𝑟 es el coeficiente de resistencia de rodadura. El autor dice que, para un cálculo teóricamente correcto, el peso dinámico del vehículo incluye los efectos de aceleración, la fuerza del remolque y la componente vertical de la resistencia del aire. Para la estimación del rendimiento del vehículo, la magnitud cambiante del peso dinámico complica los cálculos sin ofrecer mejoras significativas en la precisión. además, la transferencia de peso dinámico entre los ejes tiene una influencia mínima en la resistencia total a la rodadura (elevación aerodinámica descuidada). El autor dice que, por esta razón, el peso del vehículo estático es lo suficientemente preciso para calcular la resistencia al rodamiento en la mayoría de los casos. 1.2.2.1.. Factores que se tienen en cuenta en la resistencia de rodadura. El coeficiente de resistencia a la rodadura es un factor adimensional que expresa los efectos de las complicadas e independientes propiedades físicas del neumático y el suelo. Las condiciones estandarizadas para la medición de los efectos de variables como la estructura de los materiales del suelo, la composición del caucho, los elementos del diseño del neumático, temperatura, etc. No resulta difícil sino imposible. 1.2.2.1.1. Temperatura del neumático Porque mucho de la resistencia de rodadura en la superficie del pavimento surgen de la deflexión y la perdida de energía en el material del neumático, la temperatura del neumático tiene un efecto significativo en la resistencia experimentada. En la típica situación donde la resistencia del neumático comienza en condiciones frías, la temperatura subirá y la resistencia disminuirá durante el primer periodo de viaje..
(15) En la figura 4 se muestran los cambios relativos en la temperatura y la resistencia de rodadura que ocurrirán.. Figura 4 . Temperatura relativa del neumático y resistencia a la rodadura durante el arranque.. En la figura se puede observar que el neumático debe rodar una distancia de al menos 20 millas antes de que el sistema se aproxime al funcionamiento estable. En una prueba de llanta típica, por lo tanto, es común calentar la llanta por 20 minutos o más antes de tomar medidas que puedan verse afectadas por la condición de calentamiento. Cuando se sobrepasan las 20 millas se nota que el arrastre neumático disminuye y la temperatura aumenta. 1.2.2.1.2. Presión/ carga de inflado de neumáticos En gran medida, la presión de inflado del neumático determina la elasticidad del neumático y, en combinación con la carga, determina la deflexión en las paredes laterales y la región de contacto. El efecto general sobre la resistencia a la rodadura también depende de la elasticidad del suelo. La Figura 5 muestra cómo el coeficiente cambia con la presión de inflado en diferentes tipos de superficies.. Figura 5. Coeficiente de resistencia a la rodadura versus presión de inflado.
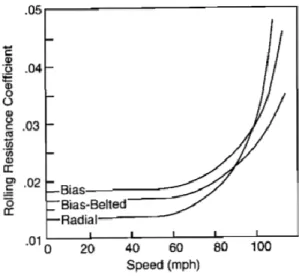
(16) 1.2.2.1.3. Velocidad El coeficiente es directamente proporcional a la velocidad debido al aumento del trabajo de flexión y la vibración en el cuerpo del neumático, aunque el efecto es pequeño a velocidades moderadas y bajas, y se supone que es constante para el cálculo. La influencia de la velocidad se vuelve más pronunciada cuando la velocidad se combina con una presión de inflado más baja. La Figura 6 muestra la resistencia a la rodadura frente a la velocidad para un neumático radial, de banda sesgada y de capa sesgada. El fuerte aumento en el coeficiente a altas velocidades es causado por una onda estacionaria de alta energía desarrollada en la carcasa del neumático justo detrás del parche de contacto del neumático.. Figura 6 Resistencia al rodamiento versus velocidad. 1.2.2.1.4. Material y diseño de neumático El autor menciona que las pérdidas de energía en los neumáticos rodantes se determinan por el grosor y el material de las paredes del neumático. 1.2.2.1.5. Coeficientes típicos En el libro se tratan varios modelos para determinar el coeficiente debido a que hay factores múltiples e interrelacionados que afectan la resistencia a la rodadura y esto hace que sea imposible que una sola formula tenga en cuenta todas las variables. Los estudios sobre las características de pérdida de balanceo de los neumáticos de caucho sólido condujeron a una ecuación de la forma [2]: 𝑓𝑟 =. 𝑅𝑥 𝑊. =𝐶. 𝑊 𝐷. √. ℎ𝑡 𝑤. (1.25). A partir de esta formulación, se considera que la resistencia a la rodadura es sensible a la carga, aumentando linealmente con la carga. Se han desarrollado también otras ecuaciones para la resistencia a la rodadura, para neumáticos que ruedan sobre superficies de hormigón. Las variables en estas ecuaciones.
(17) generalmente son presión de inflación, velocidad y carga. La precisión de un cálculo está naturalmente limitada por la influencia de factores que se descuidan.. Tabla 1 Valores típicos de coeficientes de rodadura [2]. También se habla del coeficiente de resistencia a la rodadura que se puede estimar como una constante. La siguiente tabla que utiliza Gillespie enumera algunos valores típicos que podrían usarse en ese caso: A velocidades más bajas, el coeficiente aumenta aproximadamente linealmente con la velocidad. Por lo tanto, se han desarrollado ecuaciones que incluyen una dependencia de velocidad lineal, tal como a continuación: 𝑓𝑟 =(1+v/100). (1.26). En rangos de velocidad más amplios, el coeficiente aumenta de una manera que está más cerca de una relación velocidad-cuadrado. El Instituto de Tecnología de Stuttgart ha desarrollado la siguiente ecuación para rodar sobre una superficie de concreto [2]. 𝑉. 𝑓𝑟 = 𝑓𝑜 + 3.24𝑓𝑠 (100)2.5. (1.27). Los dos coeficientes, fo y fs 'dependen de la presión de inflado y se determinan a partir del gráfico que se muestra en la figura 8.. Figura 7 Coeficientes de la ecuación 1.27 [2]. En el Instituto de Investigación de Transporte de la Universidad de Michigan, se desarrollaron ecuaciones similares a la resistencia a la rodadura de la biomasa de los neumáticos para camiones pesados, tanto de tipo radial como de capas diagonales. Estas son: 𝑓𝑟 = (0.0041 + 0.000041 𝑉) 𝐶ℎ. Neumáticos radiales. 𝑓𝑟 = (0.0066 + 0.000046 𝑉) 𝐶ℎ. Neumáticos diagonales.
(18) Donde: V= Velocidad en mph. Ch= Coeficiente de la superficie de la carretera. = 1.0 para hormigón liso. = 1.2 para concreto gastado, ladrillo, asfalto frío. = 1.5 para asfalto caliente. La resistencia al rodamiento es claramente mínima en superficies duras, lisas y secas. Un camino desgastado casi duplica la resistencia a la rodadura. En superficies mojadas, se observa una mayor resistencia a la rodadura, probablemente debido a la temperatura de funcionamiento más fría del neumático, que reduce su flexibilidad. Se puede ver que existen diferentes ecuaciones para el cálculo del coeficiente de rodadura, donde cada una de ellas manejan diferentes constantes y variables, o también se toman por medio de tablas los valores de los coeficientes, estos valores se clasifican según la superficie del suelo y el tipo de vehículo. En este caso el coeficiente que se usara para los cálculos de la resistencia a la rodadura se tomara por medio de tablas, este valor será constante ya que la velocidad que manejara el vehículo será baja entonces no sufriría grandes cambios si se llegara a usar una ecuación. 1.2.3. Fuerza aerodinámica Esta es la fuerza que resulta de una corriente de aire que fluye sobre y por debajo del perfil de un vehículo. La aerodinámica tiene su mejor impacto en automóviles y camiones a través de su contribución a la "carga en carretera". Las fuerzas aerodinámicas interactúan con el vehículo causando resistencia, elevación (o carga), fuerzas laterales, momentos en balanceo, cabeceo y guiñada, y ruido. Estos impactan la economía de combustible, el manejo y NVH (Ruido, Vibración, Aspereza). Hallar la resistencia aerodinámica sobre el vehículo tiene su complejidad ya que el autor dice que hay tres fuerzas que actúan sobre él y tiene en cuenta otros factores que no se tendrán en cuenta acá, estas fuerzas son, la fuerza longitudinal y las fuerzas laterales. La resistencia aerodinámica se caracteriza por: 𝐷𝐴 = 1/2 𝜌𝑉 2 𝐶𝐷 𝐴. (1.28). El coeficiente de resistencia se determina experimentalmente a partir de pruebas de túnel de viento o a partir de un programa computacional donde se establece una fuerza de arrastre conocida y por medio de la ecuación 1.29 se halla el coeficiente aerodinámico para el tipo de vehículo que se está analizando. 𝐶𝐷 = 1. 𝐷𝐴. ρ𝑉 2𝐴. 2. =. 𝐹𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 𝑎𝑟𝑟𝑎𝑠𝑡𝑟𝑒 (𝑃𝑟𝑒𝑠𝑖𝑜𝑛 𝑑𝑖𝑛á𝑚𝑖𝑐𝑎)(Á𝑟𝑒𝑎). (1.29).
(19) El coeficiente varía en un amplio rango según las diferentes formas. En la siguiente figura que muestra el libro, Fundamentals of Vehicle Dynamics, se pueden ver algunos ejemplos de formas y sus respectivos coeficientes, teniendo en cuenta que el aire que se aproxima es recto, o sea que está a lo largo del eje longitudinal del vehículo.. Figura 8 Coeficientes de resistencia de varios cuerpos. [2]. El cuerpo ideal según los valores de los coeficientes que se muestran en la imagen es el cuerpo en forma de gotera. Este cuerpo tiene una fuerza de arrastre de 0.007 mayor que la presión dinámica que actúa sobre el área de la gotera, es una diferencia muy mínima a comparación con la placa plana que tiene un área más grande, esta pequeña área que se forma en la gotera facilita la separación del aire y disminuye la fuerza de resistencia que se crea [2]. 1.2.4. Fuerza según la pendiente Gillespie, toma esta fuerza como un esfuerzo que se le adiciona al momento de frenar y este esfuerzo varía según el grado de la pendiente y si es positivo o negativo. Esta fuerza adicional está dada por: 𝑅𝑔 = 𝑊𝑠𝑖𝑛𝜃. (1.30). En este estudio de dinámica del vehículo no se hablará sobre el frenado, así que esta fuerza será únicamente para la sumatoria de la fuerza de tracción. Gillespie, realiza la suma de la resistencia a la rodadura y las fuerzas aerodinámicas (y las fuerzas de grado, si están presentes) indicando la carga de propulsión para el vehículo, y normalmente se conoce como "carga en carretera". Se calcula de la siguiente manera: 1. 𝑅𝑅𝐿 = 𝑓𝑟 𝑊 + 2 𝜌𝑉 2 𝐶𝐷 𝐴 + 𝑊𝑠𝑖𝑛𝜃. (1.31). Y para obtener la potencia de la carga de la carretera se multiplica el total de la carga de carretera con la velocidad y aplican el factor de conversión apropiado para obtener caballos de fuerza:.
(20) 1. 𝐻𝑃𝑅𝐿 = 𝑅𝑅𝐿 𝑉/550 = (𝑓𝑟 𝑊 + 𝜌𝑉 2 𝐶𝐷 𝐴 + 𝑊𝑠𝑖𝑛𝜃) 𝑉/550 2. 1.3.. (1.32). Modelo 2. DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO SOLAR HÍBRIDO [3]. 1.3.1. Cargas resistivas del vehículo en movimiento El análisis de fuerzas resistivas pretende determinar la potencia requerida de la unidad motora en función de todos los parámetros de carga involucrados [4]. Las cargas que se mencionan en el libro son las siguientes: • • • •. Fuerza debida a la pendiente FΘ Fuerza debida a la rodadura Fr Fuerza por efectos aerodinámicos Fa Fuerza de tracción. Figura 9 Fuerzas presentes en un vehículo en dirección a movimiento. [3]. 1.3.1.1.. Fuerza debida a la pendiente FΘ. En base en la figura 10 se obtiene la fuerza debida a la pendiente: 𝐹𝜃 = 𝑊𝑠𝑖𝑛𝜃. (1.33). Como en los modelos anteriores, cuando la pendiente es negativa esta fuerza deja de ser resistiva para convertirse en un aporte a la potencia neta del motor..
(21) 1.3.1.2.. Fuerza debida a la rodadura Fr. Esta fuerza está relacionada con el efecto resistivo presente debido a la deformación existente entre el elemento rodante (llanta) y la superficie de apoyo.. Figura 9 Fuerza de rodadura. La fuerza de rodadura se obtiene de la siguiente manera: 𝐹𝑟 = 𝐶𝑟 𝑁 = 𝐶𝑟 𝑊𝑐𝑜𝑠𝜃. (1.34). Donde Cr es el coeficiente de rodadura. Los autores manejan la siguiente tabla para determinar algunos valores de coeficientes de rodadura para diferentes superficies y ruedas.. Tabla 2 coeficientes de rodadura para diferentes superficies.
(22) 1.3.1.3.. Fuerza debida a efectos aerodinámicos Fa. Es la fuerza que se opone al avance del cuerpo a través del viento. Al igual que en los análisis anteriores, esta fuerza depende de la geometría del cuerpo, de la densidad del aire ρ, y de la velocidad del viento V.. Figura 10 Lineas de flujo de aire en un vehiculo. Se parte de la energía cinética aprovechable del viento y se tiene: 1. 𝐹𝑎 = 𝜌𝑆𝐾𝑎 𝑉 2. (1.35). 2. 1.3.1.4.. Fuerza de tracción FT. Para el movimiento de cualquier cuerpo se necesita la aplicación de una fuerza externa, para el caso de vehículos se utiliza la fuerza proveniente de la unidad motriz. Esta fuerza se relaciona con el radio de la rueda RT y el par de tracción. 𝑇. 𝐹𝑇 = 𝑅𝑇. (1.36). 𝑇. Se utiliza la 2a ley de Newton para relacionar las fuerzas externas sobre el vehículo. ∑ 𝐹 = 𝑚𝑎. (1.37). 𝐹𝑇 − 𝐹𝜃 − 𝐹𝑟 − 𝐹𝑎 = 𝑚𝑎. (1.38). 𝐹𝑇 = 𝐹𝜃 + 𝐹𝑟 + 𝐹𝑎 − 𝑚𝑎. (1.39). De esta ecuación se obtiene:. De esta forma la fuerza de tracción se podrá determinar mediante: 1. 𝐹𝑇 = 𝑊𝑠𝑖𝑛𝜃 + 𝐶𝑟 𝑊𝑐𝑜𝑠𝜃 + 2 𝜌𝑆𝐾𝑎 𝑉 2 + 𝑚𝑎. (1.40).
(23) Esta fuerza de tracción considera entonces los efectos de pendiente, rodadura, aerodinámica y los efectos inerciales unidireccionales (debidos a la presencia de aceleración). La potencia requerida para el movimiento del vehículo teniendo en cuenta todas las fuerzas de restricción que estarán en función de la velocidad se determinara por: Ẇ = 𝐹𝑇 𝑉. (1.41). A partir de la ecuación 1.40 y 1.41 la potencia se convierte en: 1. Ẇ = (𝑊𝑠𝑖𝑛𝜃 + 𝐶𝑟 𝑊𝑐𝑜𝑠𝜃 + 𝜌𝑆𝐾𝑎 𝑉 2 + 𝑚𝑎) 𝑉 2. (1.42). En este modelo se incluye la componente inercial, para prever un cambio de velocidad y que podría, en el caso particular del movimiento desde el reposo, usarse para cuantificar la necesidad de potencia para el vehículo. Lo acostumbrado en la literatura es que a partir de la capacidad de potencia que el motor ofrece, determinan que potencia sobra en determinado cambio y con ese remanente de potencia qué aceleración le puede imprimir al vehículo. En conclusión, en este modelo se usan los mismos componentes para el cálculo de la fuerza total de tracción del vehículo, que son, la fuerza debido a la rodadura, debido a la pendiente, la fuerza aerodinámica y la fuerza inercial, para la fuerza inercial los autores toman una aceleración de cero. En la tabla 1 se hace una síntesis de los modelos para ver que similitudes se encuentran en los componentes de cada uno y efectivamente se prueba que los autores coinciden en la mayoría de los componentes..
(24) Tabla 3 Síntesis de la dinámica de según distintos autores tracción. PUBLICACIÓN APROPIACIÓN Y APORTACIÓN DE METODOLOGÍA DE DESARROLLO DE VEHÍCULOS PARA RECREACIÓN TIPO BUGGY [5][6][7]. EXPRESIÓN DE POTENCIA. 𝑃=. 2 𝑉𝑚𝑎𝑥 (𝐺𝑎 ∗ 𝛹 𝑣 + 𝐾𝑤 ∗ 𝐴𝑤 ∗ 𝑉𝑚𝑎𝑥 ) 𝜂𝑡. RODADURA. AERODINÁMICA. PENDIENTE. INERCIA. 𝐹𝑓 = 𝑓𝑊. 𝐹𝑤 = 𝐾𝑤 ∗ 𝐴𝑤 ∗ 𝑉 2. 𝐹𝑖 = 𝑊𝑠𝑖𝑛𝛼. 𝐹𝑗𝑥 = 𝛿 ∗ 𝑚𝑎 ∗ 𝑔. 𝐹𝜃 = 𝑊𝑠𝑖𝑛𝜃. ∑ 𝐹 = 𝑚𝑎. 𝑅𝑔 = 𝑊𝑠𝑖𝑛𝜃. 𝑊/𝑔 ∗ 𝑎𝑥. DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO SOLAR HÍBRIDO [4]. 1 Ẇ = (𝑊𝑠𝑖𝑛𝜃 + 𝐶𝑟 𝑊𝑐𝑜𝑠𝜃 + 𝜌𝑆𝐾𝑎 𝑉 2 + 𝑚𝑎) 𝑉 2. 𝐹𝑟 = 𝐶𝑟 𝑊𝑐𝑜𝑠𝜃. 1 𝐹𝑎 = 𝜌𝑆𝐾𝑎 𝑉 2 2. FUNDAMENTALS OF VEHICLE DYNAMICS [2]. 1 𝐻𝑃𝑅𝐿 = (𝑓𝑟 𝑊 + 𝜌𝑉 2 𝐶𝐷 𝐴 + 𝑊𝑠𝑖𝑛𝜃) 𝑉/550 2. 𝑅𝑥𝑟 = 𝑓𝑟 𝑊. 𝐷𝐴 = 2 𝜌𝑉 2 𝐶𝐷 𝐴. 1.
(25) Observaciones de la síntesis •. •. En el cálculo de la fuerza aerodinámica de Gabriel Calle no se tiene en cuenta todos 1 los factores de la presión dinámica del aire que es 𝜌 𝑉 2 , solo se tiene en cuenta 2 la velocidad, esto hace que el valor de esta fuerza sea diferente a comparación de las otras dos. El único en tener en cuenta el coseno en la fuerza de rodadura es el modelo usado en, DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO SOLAR HÍBRIDO . Con esto quieren ser más precisos en la obtención de la fuerza de tracción, que por ejemplo, cuando el vehículo transite por una pendiente se tenga en cuenta el esfuerzo real que se tiene entre la superficie del suelo y la llanta, aunque este valor no varía mucho con o sin el coseno del ángulo, ya que los ángulos de las pendientes no pasan de 20°, siendo así los resultados del coseno del ángulo muy cercanos a uno, por tal motivo los otros autores, no toman este dato para sus cálculo, ellos prefieren aproximar este valor a 1.. Por medio de las siguientes graficas se mostrará el comportamiento de cada una de las fuerzas resistivas al movimiento y el de la fuerza total de tracción de cada autor con una aceleración y una pendiente cero.. Figura 11 Fuerzas resistivas de cada modelo.
(26) Se puede ver que el modelo que utiliza Gabriel en el cálculo de la fuerza aerodinámica arroja un esfuerzo el doble de grande que los otros dos modelos, esto significa que se tendría un mayor consumo de potencia en el motor..
(27) Capítulo 2 2.1.. Selección del modelo. El objetivo de este capítulo es seleccionar un modelo adecuado que permita calcular la demanda de potencia que exige el vehículo de acuerdo con unos parámetros ya establecidos de diseño, y seleccionar un motor que entregue una potencia y un par motriz que supla estas necesidades. Se trabajará con los siguientes parámetros. Coeficiente de rodadura. Cr. 0,03. Área frontal de automóvil. S. 1,98. ma. 600. Peso del automóvil Peso de carga. 600. m2 kg kg. Peso del automóvil total (del vehículo + carga) en Newton. Ga. 11772. Eficiencia mecánica de la transmisión. nT. 0,912. Gravedad. N. 9,81. m/s2. Densidad del aire. ρ. 1,2. kg/m3. Coeficiente de penetración aerodinámico. Ka. 1,1. Aceleración. a. 0. m/s2. Vmax. 45. km/h. 14. in. Velocidad máxima Diámetro de la llanta. N. Tabla 4 Parámetros del vehículo. Para la selección del coeficiente de rodadura se utilizó el método por medio de tablas, de la figura 12 [8] se selecciona el coeficiente de una carretera de asfalto. En las gráficas de la figura 14 se puede validar que el modelo de Gillespie y el modelo que utilizaron los autores del vehículo solar, son muy similares, así que el modelo que se eligió para el análisis de la dinámica de tracción del vehículo que se está trabajando es el modelo de Diseño y construcción de un vehículo solar híbrido, es interesante porque ellos quisieron tener en cuenta todos los aspectos que interfieren en el movimiento de un vehículo, todos los esfuerzos que se dan principalmente si este transita por una pendiente, no quisieron dejan escapar nada, lo que hacen es que calculan todas las componentes presentes para que al momento de seleccionar la potencia que el motor deba tener , este pueda suplir con todo lo que el vehículo exige para su buen rendimiento..
(28) Además, ese proyecto no se quedó solo en papel, fue construido logrando así validar los resultados que se obtuvieron por medio de ecuaciones. 2.1.1. Potencia requerida por el vehículo La figura 16 presenta el comportamiento de la potencia en función de la velocidad, se describen los valores de potencia que genera cada una de las fuerzas resistivas (aerodinámica, rodadura, pendiente) dependiendo de la inclinación de la carretera, allí se puede ver cual fuerza influye más al momento de determinar la potencia total según el ángulo de la pendiente y la velocidad. Se calculan pendientes de 0° 3° 5° y 10° con una velocidad de referencia de 45 km/h. Con una pendiente de 5° la potencia requerida sólo por la fuerza de pendiente es de 12825 W, pertenece a un 65% de la potencia total (19775 )W, esta sería la fuerza dominante a mayores pendientes, con pendientes de 0°,, predomina la fuerza de rodadura con una demanda de 4414 W siendo un 63% de la total (6977 W), aunque no en todos los casos es así ya que todo depende del coeficiente de rodadura que se elija, en otros casos, a pendientes de cero la fuerza que más influye es la aerodinámica, se puede ver un ejemplo en la referencia [3] pagina 21. Mas adelante se muestra la potencia del motor que suplirá estos requerimientos, por medio de graficas se enseña cómo será el comportamiento y hasta que pendiente y velocidad será limitado el vehículo. En el siguiente numeral se muestra el par motriz requiero por el vehículo..
(29) 3°. 0°. Ppendiente 0 Prodadura 4414 Paerodinamica 2552 Ptotal. Ppendiente Prodadura Paerodinamica. 7701 4408 2552. Ptotal. 14662. 6967. 10°. 5°. Ppendiente 12825 Prodadura 4397 Paerodinamica 2552 Ptotal. 19775. Ppendiente 25552 Prodadura 4347 Paerodinamica 2552 Ptotal. Figura 12 Comparación de potencia exigida por cada fuerza en. función de la velocidad y a diferentes pendientes. 32452.
(30) 2.1.2. Par motriz El par motriz o torque es la fuerza que necesita el motor para hacer mover el automóvil. Una de las mayores ventajas que tienen los motores eléctricos es que sus curvas de potencia y par aparecen desde velocidades cero, facilitando así la aceleración y mejorando la efectividad de la entrega de energía del motor, otra ventaja también es que el motor eléctrico puede iniciar y detener su giro en cualquier posición y no necesita estar girando constantemente para no “apagarse”. Con el motor eléctrico se aprovecha al máximo la potencia que este entrega, a comparación de un motor de combustión interna que solo se utiliza un pequeño porcentaje de la potencia disponible. Otra ventaja muy importante por la cual se eligió un motor eléctrico para este tipo de vehículo es que este motor se presta mucho más fácil para transitar en la ciudad, ya que el vehículo puede transitar en medio de una calle muy congestionada y no va a tener el problema de que, si le toca frenar o disminuir mucho la velocidad el motor se va a apagar, ya que este no tiene que estar en constante rotación para estar encendido. El motor que se seleccionó fue el motor 3CG401 con el que el Renault Twizy está equipado. Es un motor con una potencia de 13 kW y un par máximo de 57 Nm a 2100 revoluciones por minuto. [9] En la figura 17 se calcularon los torques que el vehículo necesita a diferentes velocidades y pendientes, con una pendiente de 5° el par motriz todavía logra suplir las exigencias del vehículo, pero no a su máxima velocidad si no a 30 km/h, lo que significa que el vehículo puede transitar por el alto de la línea (Calarcá) a esta velocidad y la demanda de torque la supliría el motor. El par motriz se calcula de la siguiente manera: 𝑇𝑀 =. 𝑅𝑇 ƞ𝐺. 𝐹𝑇. (2.0). Donde R es el radio de de la reueda de traccion, ƞ la eficiencia de la transmision y G la relacion de transmision.. Figura 13 Curva del torque que entrega el motor 3CG401.
(31) La figura 18 Presenta la máxima potencia del motor 3CG401 (13 kW), esta potencia suple las necesidades del vehículo a la velocidad máxima que se estableció y a una pendiente de 0°. Mientras más aumenta la velocidad y el ángulo más potencia se va demandado, al igual que sucedió con el torque, a 5° a una velocidad de 30 km/h la potencia que entrega el motor logra satisfacer las exigencias del vehículo en estas condiciones.. Figura 14 Potencia entregada por el motor 3CG401.
(32) Conclusiones En la realización del proyecto se encontraron diferentes métodos que se utilizan para hacer un análisis de la dinámica de tracción a los vehículos, se pudo encontrar que cada factor que se vaya a elegir influye muchísimo en los resultados finales que se quieran obtener, por ejemplo, en la selección de los coeficientes aerodinámicos y los de rodadura. En el caso del coeficiente de rodadura se encontró en el libro de Gillespie que existen diferentes métodos de hallar este coeficiente, ya sea por tablas como se eligió acá, por ecuaciones en función de la velocidad, según el tipo de neumático o si es un camión muy pesado. El motor no satisface las necesidades a velocidades mayores de 60 km/h, pero no es necesario que lo haga porque este será un vehículo para transportar carga con una velocidad máxima de 45 km/h y para esto no necesita velocidades altas, solo necesita que llegue a su destino final sin tener que competir con nadie. Tiene sentido que Guillespie y Gabriel Calle no tengan en cuenta en la expresión del cálculo de la fuerza de rodadura la componente perpendicular al suelo (cosθ) por los ángulos tan pequeños que se manejan en las carreteras dando un valor muy aproximado a 1. Por medio de las gráficas se obtuvo la demanda de potencia y torque del vehículo a diferentes ángulos y velocidades, comprobando que a pendientes de 10° el motor no suple estas grandes exigencias. Los factores más influyentes en el consumo de potencia a medida que la pendiente va aumentando es la fuerza debido a la pendiente, con más de un 60% de consumo de la potencia total. Una de las formas de disminuir este gran consumo seria disminuyendo el peso total del vehículo. Y a bajas velocidades y a pendientes de 0° las fuerzas actuantes son la aerodinámica y la de rodadura, predominando la de rodadura. Un cambio en un coeficiente o en el diseño afecta mucho en la potencia requerida por el vehículo, puede disminuir o aumentar notablemente el consumo, por eso se deben de hacer las respectivas pruebas para obtener valores reales y no quedarse solo con los teóricos. En los análisis realizados la aceleración fue de cero, debido a que no es usual en la literatura calcular la demanda de potencia para el vehículo con consideración de la inercia. Lo acostumbrado es, a partir de una disponibilidad de potencia del motor, determinar que potencia le sobra en determinado cambio y con este remanente de potencia qué aceleración le puede imprimir a vehículo, que dinamismo le puede imprimir [3]..
(33) Referencias [1] Calle, G. 2012. Aportación y Apropiación de Metodologías de desarrollo de Vehículos para Recreación tipo Buggy. Universidad Tecnológica de Pereira. Facultad de Ingeniería Mecánica. [2] Gillespie, Thomas D. 1992. Fundamentals of Vehicle Dynamics. Society f Automotive Engineers, Inc. [3] Salazar, E. Arroyave, F. Vásquez, A. 2016. Diseño y construcción de un vehículo solar híbrido. Universidad Tecnológica de Pereira, Facultad de Tecnología. [4] Romero, C. 1995. Dinámica de tracción del automóvil. Universidad Tecnológica de Pereira, Facultad de Tecnología. [5]R. Stone y J.k Ball, Automotive Engineering Fundamentals, Warrendale: SAE, 2014. [6] G. Genta y L. Morello, The Automotive Chassis, vol. 2:System Design, Torino: Springer, 2009. [7] A. S. litvinov y Y. E. Farobin, Automobili: teoriya aekspluatatsionnykh svoystv, Moscú: Mashinostroyeniye, 1989. [8] Wong, J. Y. 2001. Theory of Ground Vehicles. Departament of Mechanical and Aerospace Engineering, Carleton University, Canada. Third Edition, John Wiley and Sons, Inc. [9] Renault. (2015). Boletín Técnico Renault SOFASA N° 1495..
(34)
Figure

![Figura 2 Cargas debida al peso y centro de gravedad [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/2715589.539232/9.918.263.630.722.986/figura-cargas-debida-peso-centro-gravedad.webp)


+7
![Figura 7 Coeficientes de la ecuación 1.27 [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/2715589.539232/17.918.331.641.716.855/figura-coeficientes-de-la-ecuación.webp)
![Figura 8 Coeficientes de resistencia de varios cuerpos. [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/2715589.539232/19.918.278.627.217.488/figura-coeficientes-resistencia-varios-cuerpos.webp)
![Figura 9 Fuerzas presentes en un vehículo en dirección a movimiento. [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/2715589.539232/20.918.274.649.508.655/figura-fuerzas-presentes-vehículo-dirección-movimiento.webp)


Documento similar
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
