UNIVERSIDAD NACIONAL DE INGENIERÍA
, , ,
FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA
"CONTROL DE LOS MOTORES SERIE DE CORRIENTE
CONTINUA DE UNA LOCOMOTORA, BASADO EN PLC"
INFORME DE SUFICIENCIA
PARA OPTAR EL TÍTULO PROFESIONAL DE:
INGENIERO ELECTRICISTA
PRESENTADO POR:
RAFAEL JULIO LUCERO MELGAREJO
PROMOCIÓN
1999-2
SUMARIO
El presente trabajo tiene por objetivo, diseñar e implementar un sistema de control basado en un Controlador Lógico Programable (PLC), para el sistema electromecánico de arranque, incremento de velocidad y parada de una locomotora extractora de mineral, compuesta por 02 motores serie de corriente continua.
En el capítulo I, se efectúa la descripción del sistema de control actual de la locomotora: sus características generales de operación y descripciones mecánicas. En el capítulo II, se efectúa la descripción en detalle del diseño del sistema de control de los motores serie de corriente continua, es decir:
Se describe el sistema electromecánico a controlar; haciendo uso de un esquema gráfico, - en el cual se indican los dispositivos sobre los que se actuaría y como se efectuaría esto.
Se señalan, además, las secuencias lógicas empleadas para la elaboración del programa de control, mostrando la tabla lógica correspondiente y el detalle del funcionamiento del sistema para cada instrucción ingresada.
Se muestran las características técnicas de los dispositivos constitutivos del sistema de control: contactores de potencia para corriente continua y controlador lógico programable, así como las del software de control SLC-500 de Allen -Bradley.
En el capítulo III se muestra la evaluación técnico-económica efectuada, para la
elección del sistema de control a implementarse, efectuando un análisis técnico
comparativo, así como la comparación de costos respectiva. Además se efectúa la
descripción del prototipo del sistema de control implementado; en el cual se emplea el
mismo modelo de controlador lógico programable utilizado en la solución y relés de
PRÓLOGO
CAPÍTULO I
ÍNDICE
DESCRIPCIÓN DEL SISTEMA DE CONTROL ACTUAL DE LA LOCOMOTORA
1.1 Introducción 3
1.2 Motores Serie de Corriente Continua a controlar 4
1.2.1 Características y aplicaciones de los motores serie de corriente continua 4
1.2.2 Aplicaciones Típicas y observaciones generales 4 1.2.� Dispositivos de arranque automático para motores de e.e. 4 1.2.4 Control de velocidad serie-paralelo de motores serie de e.e. 5 1.3 Características eléctricas y mecánicas de la locomotora 8 CAPÍTULO II
DISEÑO DEL SISTEMA DE CONTROL DE LOS MOTORES SERIE DE
CORRIENTE CONTINUA
2.1 Descripción del Sistema Electromecánico a controlar
2.2 Descripción del modo de operación del sistema ha controlar
13 15 2.3 Diseño y descripción de la lógica de control para la elaboración del software
VII
2.4 Descripción de los dispositivos constitutivos del Sistema de Control 21
2.4.1 Contactor 27
2.4.2 Controlador Lógico Programable (PLC) 30
2.4.3 Computador personal con software de programación 34
2.5 Formulación del programa de control 34
CAPÍTULO 111
EVALUACIÓN TÉCNICO-ECONOMICA PARA LA IMPLEMENTACION DEL SISTEMA DE CONTROL
3.1 Evaluación técnica de la solución planteada 3.2 Evaluación económica de la solución planteada
3 .3 Descripción del prototipo implementado
CONCLUSIONES
APÉNDICES
BIBLIOGRAFÍA
57
58
60
66
68
PRÓLOGO
La necesidad, en el área de control, de reemplazar los sistemas lógicos constituidos por relés, temporizadores, contadores, etc., o los sistemas electrónicos de aplicaciones a procesos específicos; debido al alto costo que significaba su
mantenimiento o cambio en sus condiciones de operación; motivó al desarrollo de nuevas tecnologías destinadas a satisfacer este requerimiento.
Es así que se logra desarrollar un equipo electrónico dotado de interfases de entrada y de salida, programable en su operación a través de un software, lo que le permite ser un sistema flexible y confiable, eliminando los altos costos de mantenimiento y reemplazo de dispositivos.
A este equipo electrónico se le denominó PLC (Controlador Lógico Programable), el cual soporta condiciones eléctricas y ambientales variables, características de la industria.
En el desempeño de mi labor profesional tuve la ocasión de desarrollar e
implementar un sistema destinado a controlar las secuencias electromecánicas de
2
compuesto por dos motores sene de corriente continua, empleando para ello un
Controlador Lógico Programable (PLC).
El problema que se planteo fue el siguiente:
El sistema electrónico de control de contactores de potencia, correspondiente a una
locomotora extractora de mineral pertenece a la mina Santa Luisa ubicada en el
departamento de Ancash, estaba averiado.
El reemplazo de las tarjetas electrónicas de este sistema, significaba un tiempo elevado (03 meses), por lo cual el propietario solicitó una solución local.
Una empresa dedicada a la reparación de locomotoras, instaló un sistema
electromecánico de contacto de levas, no utilizando para ello, los contactores existentes.
El sistema electromecánico instalado no fue dimensionado adecuadamente por lo
cual falló, es entonces que se solicita una solución electrónica confiable.
La solución planteada fue la siguiente:
Se planteó utilizar un Controlador Lógico Programable (PLC), reutilizando los contactores existentes, debiéndose actuar sólo en las bobinas de estos, empleándose para ello tensiones de 24 VDC, que serian inyectadas a las bobinas a través de relés auxiliares de baja potencia accionados por una fuente DC externa y los contactos del controlador.
Se efectuó un estudio de todas las características con las que debía contar el controlador, con lo cual se determinó cual era el más apropiado.
CAPÍTU LOI
DES C RIPCIÓN DEL SIS TEMA DE CONT ROL AC TUAL DE LA LOCOMOTORA
1.1 Introducción
Actualmente la locomotora extractora de metal se encuentra operativa, con el sistema
de control basado en PLC, montado en la propia locomotora.
Tuvo que diseñarse para el montaje, un gabinete robusto con resortes interiores para
amortiguar al PLC, en casos de choques de la locomotora (muy usuales).
El PLC es alimentado localmente con 24 VDC, proveniente de una batería.
La activación del arranque, variación de velocidades, inversión de dirección y
parada, es efectuada a través de un mecanismo de palanca que proporciona contactos
secos en su variación, forma parte del antiguo sistema de control y está montado en
la consola del operador. El sistema está asociado al contacto correspondiente al
"pedal de hombre muerto", el cual es un dispositivo de seguridad que tienen las
locomotoras y se trata de un sistema en el que el maquinista debe pisar
continu�ente un pedal. En caso de que el maquinista deje de pulsar el pie del pedal,
4
1.2 Motores serie de corriente continua a controlar
Se denomina así a los motores de corriente continua, cuyo arrollamiento de
excitación respecto al arrollamiento del inducido, se encuentra conectado en serie.
1.2.1 Características y aplicaciones de los motores serie de corriente continua.
• Par de arranque%: Muy elevado, hasta 500.
• Par máximo de funcionamiento momentáneo%: Hasta 400.
• Regulación o característica de velocidad %: Muy variable, desde plena carga
a vacío.
• Control de velocidad %: Mediante reóstato en serie.
1.2.2 Aplicaciones Típicas y observaciones generales:
• Para motores que requieran pares de arranque muy elevados y cuya velocidad
variable ajustable sea satisfactoria.
• Este motor se denomina a veces motor de tracción.
• La carga debe estar accionada rígidamente, no mediante correas.
• Para locomotoras, montacargas, grúas, puentes, volquetes.
• Para evitar sobrevelocidades, las cargas más ligeras no deben ser menores
que el 15 o 20 % del par de plena carga.
1.2.3 Dispositivos de arranque automático para motores de e.e.
La palabra automático significa actuando por sí mismo, funcionando por su propio
mecanismo cuando se pone en acción o es impulsado a hacerlo por alguna influencia
impersonal, como por ejemplo el paso del tiempo. En este caso el operador
únicamente pulsa el botón de arranque, incremento de velocidad, parada, marcha
5
completamente automática. El mecanismo activo de un controlador automático es
generalmente un contactor magnético.
Las partes importantes de un arranque automático son: los contactores magnéticos
usados para hacer las conexiones a la línea y para desconectar las resistencias de
arranque; los distintos enclavamientos auxiliares eléctricos y mecánicos y los relés
asociados con el contactor; los interruptores y botones de control, y las resistencias
de arranque.
La parte más importante de cualquier dispositivo de arranque o controlador
automático es el contactor magnético.
En el arranque de tipo automático, las resistencias de arranque se sustituyen por
contactores llamados de aceleración, cuyas bobinas de accionamiento están controladas de acuerdo con el método de aceleración de límite de tiempo definido, por ejemplo ( que es el método que fue empleado para el presente proyecto). Tal
como su nombre lo sugiere, en el método de aceleración de tiempo definido las resistencias se desconectan unas tras otra, a intervalos definidos de tiempo.
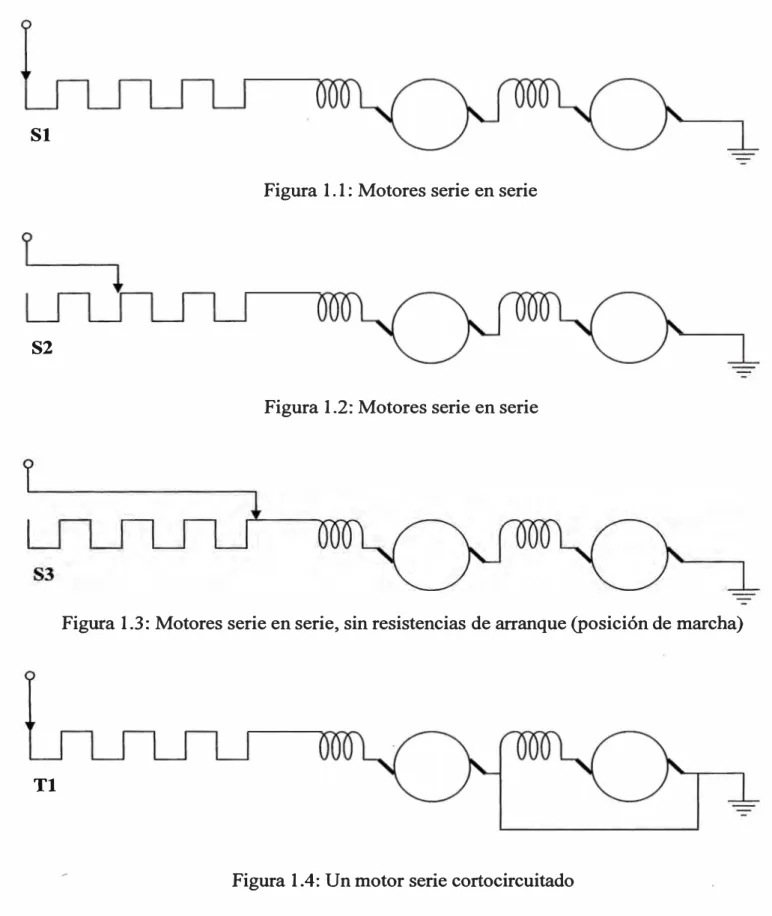
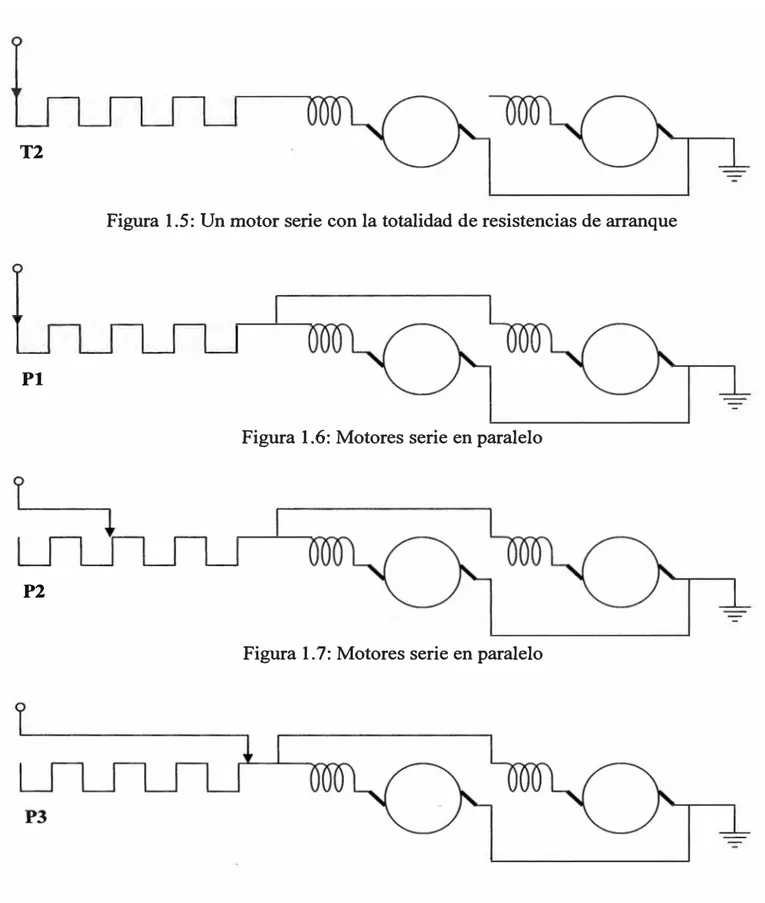
1.2.4 Control de velocidad serie-paralelo de motores serie de e.e.
El control a través de variación de conexión con resistencias serie se usa para variar
la velocidad de los motores serie de las locomotoras.
La resistencia produce una caída en la curva de velocidad. Cuando la locomotora está equipada con dos o más motores, se aplica el control serie-paralelo.
Esto es un control combinado reostático y de tensión.
6
S1
Figura 1.1: Motores serie en serie
S2
Figura 1.2: Motores serie en serie
Figura 1.3: Motores serie en serie, sin resistencias de arranque (posición de marcha)
Tl
T2
Pl
P2
Figura 1.5: Un motor serie con la totalidad de resistencias de arranque
Figura 1.6: Motores serie en paralelo
Figura 1.7: Motores serie en paralelo
Figura 1.8: Motores serie en paralelo, sin resistencias de arranque (posición de marcha)
8
En S 1 (ver Figura 1.1) los motores están en serie entre sí y con todos los reóstatos de
arranque.
En S2 (ver Figura 1.2) se han eliminado algunos de los reóstatos de arranque, y en S3
(ver Figura 1.3) el reóstato se ha eliminado por completo y cada motor funciona a la mitad de tensión de línea. En TI (ver Figura 1.4) un motor esta cortocircuitado y todos los reóstatos de arranque están en serie con el otro motor. El control continúa
hasta P3 (ver Figura 1.8), donde ambos motores reciben plena tensión de línea. Las posiciones S3 (ver Figura 1.3) y P3 (ver Figura 1.8) se conocen como posiciones de marcha, debido a que todos los reóstatos están eliminados.
1.3 Características eléctricas y mecánicas de la locomotora
A continuación se indican el equipamiento estándar de la locomotora a controlar y
dimensiones:
• Motores serie:
Dos de 250 VDC, 45kW (60h.p.). (Ver Figura 1.9)
• Controlador:
Controlador de contacto de leva. (Ver Figura 1.1 O)
• Resistencia:
Bobina de aleación tipo cinta. (Ver Figura 1.11)
• Transmisión:
Se efectúa a través de una rueda dentada, que forma parte del eje y el
eje biselado sin fin del motor. (Ver Figura 1.12)
• Frenos de pedal:
Una plancha de hierro de forma de zapato opera directamente un
• Frenos de emergencia / parada:
Se efectúa a través de frenos de disco, asociados al pedal de hombre muerto.
• Ruedas:
Ruedas con riel, de acero de 61 O mm de diámetro, las cuales son frenadas por el mecanismo.
• Ejes:
De aleación de acero y de gran diámetro.
• Caja de ejes:
Tipo cojinete de rodillos. • Suspensión:
Caucho adherido al metal para amortiguarlo.
• Marco:
De lámina de acero soldada.
• Acopladores:
Tipo cavidad y conector tipo pasador. Acopladores alternativos están
disponibles.
• Dispositivo de alerta:
Corneta operada eléctricamente.
• Colector de corriente:
Pértiga de trole tipo pantufla. Colectores de corriente del pantógrafo disponibles.
• Focos delanteros:
Luces herméticamente selladas en cada extremo de la locomotora.
• Dimensiones de la locomotora:
Ancho de vías mínimo 600 mm; ancho completo mínimo 1270 mm. (Ver Figura 1.14)
Figura 1.9: Motor Serie DC
.
' .,
Figura 1.1 O: Controlador de contacto de leva
Figura 1.11 : Resistencias
11
Figura 1.12: Transmisión
12
CLl�VTON
CAPÍTULO II
DISEÑO DEL SISTEMA DE CONTROL DE LOS MOTORES SERIE DE
CORRIENTE CONTINUA
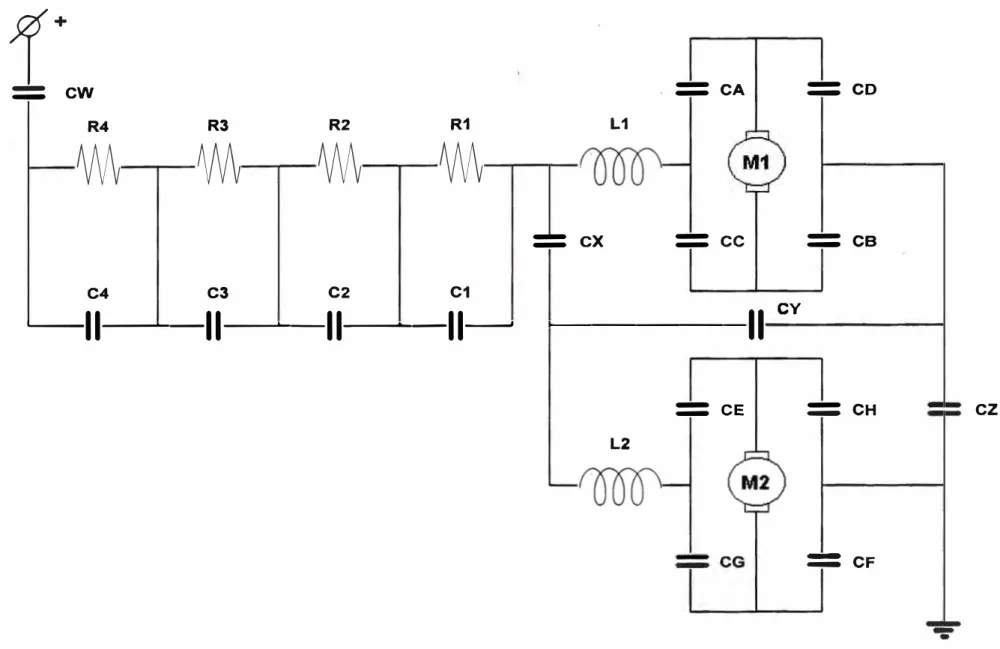
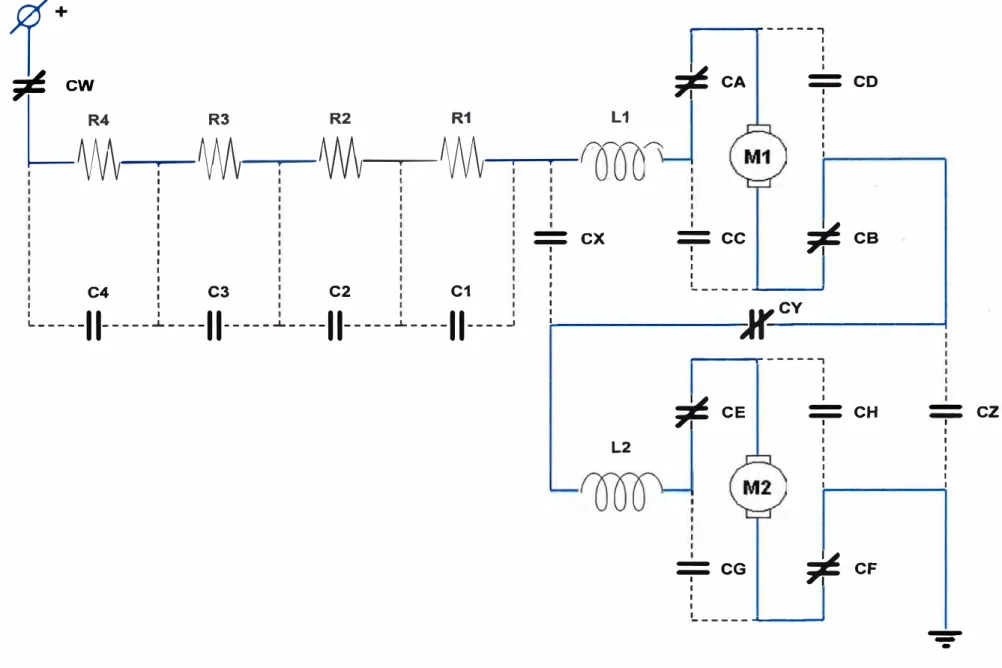
2.1 Descripción del Sistema Electromecánico a controlar.
El diagrama del sistema electromecánico a controlar es el que se muestra a
continuación en la Figura 2.1.
El sistema está compuesto por 02 motores serie de corriente continua de 60 HP a 250
VDC, cada uno; 01 contactor principal (CW) que determina la operación o no del
sistema, se encuentra asociado al "pedal de hombre muerto" de la locomotora; 04
resistencias (Rl, R2, R3 y R4) que están en paralelo con 04 contactores
respectivamente (Cl, C2, C3 y C4), los cuales hacen posible incrementar la
velocidad de los motores al disminuir las resistencias serie del circuito,
incrementando la tensión aplicada a los motores; 03 contactores que hacen posible
poner a los motores en serie o en paralelo (CX, CY y CZ) y 08 contactores
adicionales que hacen posible determinar el sentido de giro de cada motor (CA, CB,
1
-
-
+
cw
-
-
CA-
-
CDR4 R3 R2 R1 L1
V\A
V\A
V\A
V\A
--
ex
-
-
ce
-
-
CBC4 C3 C2 C1
.____11_____._-11---J.--11---11----
1---II
CY=ce
-
-
CHcz
L2
=
CF15
Las características de operación de los contactores DC unipolares asociados al
sistema son las siguientes:
• Contactor de apertura y cierre a plena carga: CW.
• Contactor de apertura y cierre a carga parcial: Cl, C2, C3, C4, CX, CY y CZ.
• Contactor de apertura y cierre sin carga: CA, CB, CC, CD, CE, CF, CG y
CH.
Cabe mencionar que el control se efectúa sobre las bobinas de los contactores,
empleándose para ello tensiones de 24 VDC, que serán inyectadas a estas a través de
relés auxiliares de baja potencia accionados por una fuente DC externa y los
contactos del controlador.
2.2 Descripción del modo de operación del sistema ha controlar.
El sistema electromecánico a controlar ha de operar de la siguiente forma:
Se ha de variar la conexión de las resistencias en serie, para variar la velocidad de los
motores serie de la locomotora al incrementarse la tensión aplicada a los motores
serie, dispuestos en serie o en paralelo.
Como la locomotora está equipada con dos motores, se aplica el control sene
paralelo. Esto es un control combinado reostático y de tensión.
A plena velocidad, la resistencia queda eliminada completamente y ambos motores
funcionan en paralelo a la tensión de línea.
El operador hará uso de una serie de pulsadores dispuestos en la consola de la
locomotora, para determinar la velocidad a la cual se desplazará.
El controlador (PLC), efectuará automáticamente la secuencia de control para los
16
Es necesaria, para todo el proceso de control, la activación del contactor
correspondiente al "pedal de hombre muerto".
2.3 Diseño y descripción de la lógica de control para la elaboración del software
correspondiente.
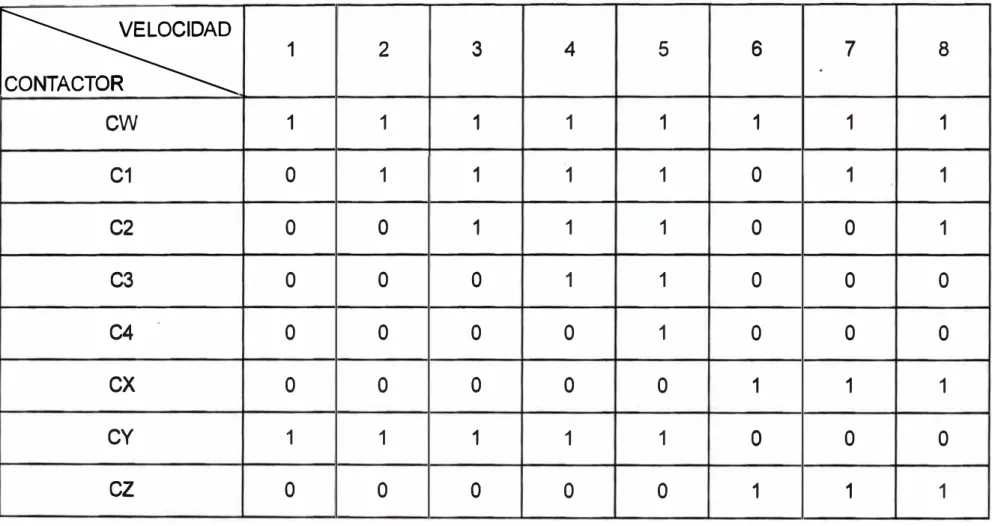
A continuación se muestra la tabla lógica (TABLA Nº 2.1 ), correspondiente a las
secuencias de control necesarias para el incremento de velocidades de los motores
serie de corriente continua.
Cabe señalar que se han de activar sólo 03 niveles de velocidad, a los cuales fueron
asociados 03 pulsadores:
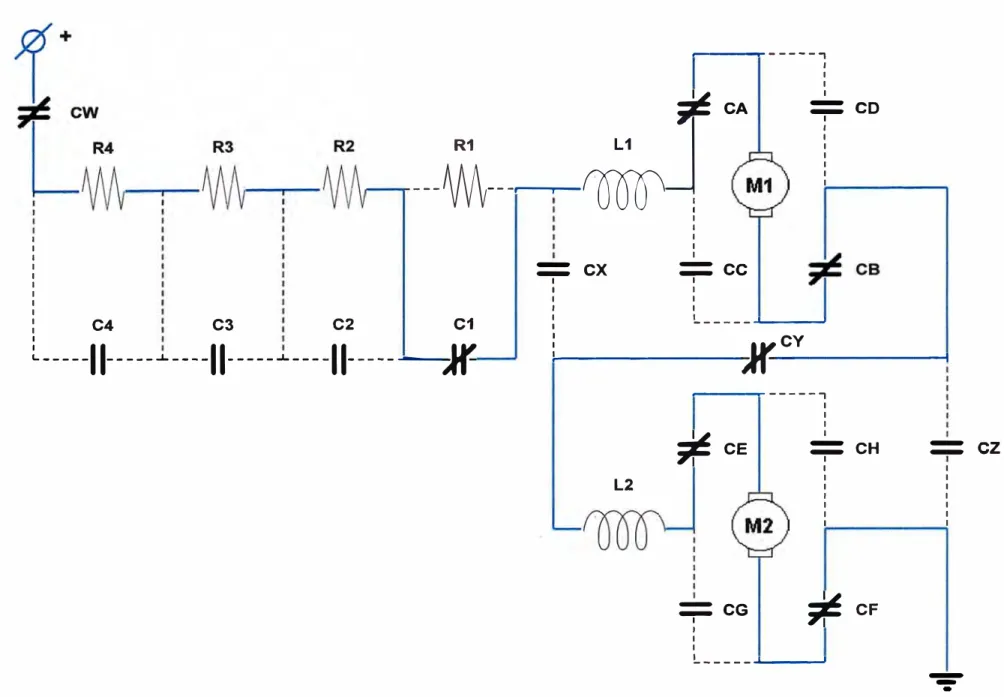
• El primer nivel agrupará las velocidades 1, 2 y 3 (ver Figuras 2.2, 2.3 y 2.4),
mostradas en la tabla y las secuencias de control correspondientes serán
efectuadas automáticamente. En la velocidad 1 (ver Figura 2.2) los motores
serie se encuentran conectados en serie entre ambos y con la totalidad de
resistencias (04 en total) conectadas también en serie con ellos. En la
velocidad 2 (ver Figura 2.3) los motores serie se encuentran conectados en
serie entre ambos y ahora sólo 03 resistencias (de las 04) permanecen
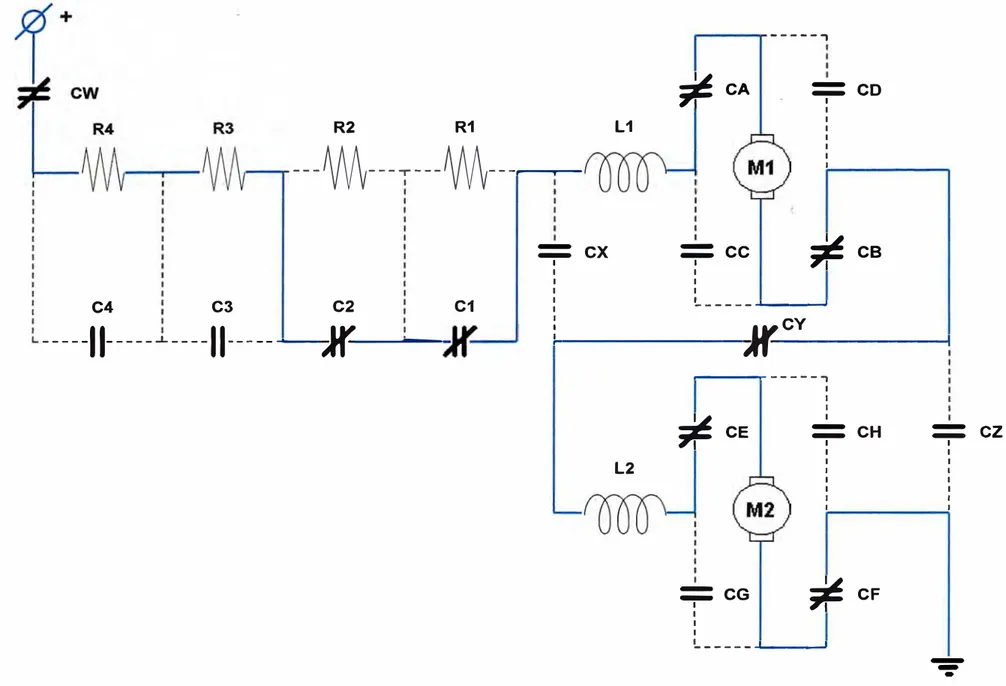
conectadas también en serie con ellos. En la velocidad 3 (ver Figura 2.4) los
motores serie se encuentran conectados en serie entre ambos y ahora sólo 02
resistencias (de las 04) permanecen conectadas también en serie con ellos.
• El segundo nivel agrupará las velocidades 4, 5 y 6 (ver Figuras 2.5, 2.6 y 2. 7),
mostradas en la tabla y las secuencias de control correspondientes serán
efectuadas automáticamente. En la velocidad 3 (ver Figura 2.5) los motores
�
1
2
3
4
5
6
7
8
R
cw
1
1
1
1
1
1
1
1
C1
o
1
1
1
1
o
1
1
C2
o
o
1
1
1
o
o
1
C3
o
o
o
1
1
o
o
o
C4
o
o
o
o
1
o
o
o
ex
o
o
o
o
o
1
1
1
CY
1
1
1
1
1
o
o
o
cz
o
o
o
o
o
1
1
1
1
#
+
cwL
W\
-
,
AM
-
Wh-Wv
�
,,-....,,.-....L,,.-....1,,.-....1 1 C4 1 1 1 1 1 1 1 1 1 1
C3 C2 C1
--
1 1 1 1 1 1 ex----
---,
#
CA 1 1 1 1--
1 1 1 1 1 1 1 1 CD=ce
1#
CB1 1 1 !,_ __________ _ 1 1
L
_
-
---11-
----1---
-11-
----
_i_ - - --11-
----
_i_ - - --
11
----
.J ¡..: ___________K-
_
c
_
v
________ _
L2
---
...---,
#
CE 1 1 1 1--
1 1 1 1 1 1 1 1 CH=cG
1#
CF1 1
1
!,_ _________ __,
Figura 2.2: Control de velocidad serie de motores serie de corriente continua - Velocidad 1
1 1 1 1 1 1 1 1
C4 C3 C2
---
-
----,
11 1 1
-#
CA---Wv
-
--
...----.-
�
11 1 1 1 1 1 1 C1
--
1 1 1 1 1 1ex
1 1 1 1 1=ce
11 1 1
L _____ _.._ __ __,
CD
1 1 1
L---11---A---11-
---A----
-
11-
---
-
-
K-
¡...¡
---
K-
-
c
v
_
________ _
L2
---,
#
CE 1 1 1 1--
1 1 1 1 1 1 1 1 CH=cG
1#
CF1 1 1
L _____ _.._ __ __,
Figura 2.3: Control de velocidad serie de motores serie de corriente continua - Velocidad 2
C4 C3
R2 R1
---Wv---
T - --Wv--
-
·
--...--C2 C1
--
1 1 1 1 1 1ex
L1#
CA---,
--
1 1 1 1 1 1 1 1 CD7
ce
#
ce
1 1 1
L----'----__,,¡
---11---L----II---
-
K-
-
;..
¡
_________K-
_c_v
_______
-1 L2
---
--
-
--,
#
CE 1 l 1 1--
1 1 1 1 1 1 1 1 CH=cG
11
1
#
CF
1
t. _____ _.._ __ __,
Figura 2.4: Control de velocidad serie de motores serie de corriente continua - Velocidad 3
21
resistencia (de las 04) permanece conectada también en serie con ellos. En la
velocidad 5 (ver Figura 2.6) los motores serie se encuentran conectados en
serie entre ambos y ahora ninguna resistencia ( de las 04) permanece
conectada en serie con ellos, aplicándose a cada motor, la mitad de la tensión
de línea. En la velocidad 6 (ver Figura 2.7) los motores serie se encuentran
conectados en paralelo entre ambos y la totalidad de resistencias (04 en total)
conectadas en serie con ellos.
• El tercer nivel agrupará las velocidades 7 y 8 (ver Figuras 2.8 y 2.9),
mostradas en la tabla y las secuencias de control correspondientes serán
efectuadas automáticamente. En la velocidad 7 (ver Figura 2.8) los motores
serie se encuentran aún conectados en paralelo entre ambos y ahora sólo 03
resistencias (de las 04) permanecen conectadas en serie con ellos. En la
velocidad 8 (ver Figura 2.9) los motores serie se encuentran conectados en
paralelo entre ambos y ahora sólo 02 resistencias ( de las 04) permanecen
conectadas en serie con ellos.
En cada cambio de velocidad que involucra apertura de contactores ( en especial para
la conexión paralelo de moto tes), se ha de tener en cuenta los tiempos necesarios
para la extinción de los arcos generados, a fin de garantizar un :funcionamiento
confiable.
C4
---11---R3 R2 R1
---V\A---,---V\A---, ---V\A--
-
.---.---
ex
-
11
1
1
C3 C2 C1 1 1
L1
.----
'T'"
---,
CA 1 1 1 1
--
1 1 1 1 1 1 1 1 CD=ce
11 1
#
CB 1 !,_ __________ _, 1K-
K-
K-
11
---
;jf
-
c
_
v
_____
---1 .----...---
---,
#
L2
J
�
CE
-
-
1 1 1CH
=cG
11 1
#
CF1
!,_ _____ ...__ __ _,
Figura 2.5: Control de velocidad serie de motores serie de corriente continua- Velocidad 4
R3 R2 R1
----Af\fv---
T - --Af\fv---
T - --A/1/v
-
--
r --Af\fv--
-.---.---
,
C4 C3 C2 C1
--
1 1 1 1 1 1ex
L1---
---
---,
1 1 1 1--
1 1 1 1 1 1 1 1 CD7
ce
#
ce
1 1 1
!,.. _________ _
.____M---M---M---M-
....
:
---
M-
-
c
_
v
________
-tL2
---
---,
#
CE 1 1 1 1--
1 1 1 1 1 1 1 1 CH=co
1#
CF1 1
1
!,.. _________ _
Figura 2.6: Control de velocidad serie de motores serie de corriente continua - Velocidad 5
1
+
---
--
---,
#
CW#
CAL
A
��
-
A
�
3
A
,
_
A
�
2
A
__
R1 L1J
--
1 1 1 1 1 1 1 1 CD'VVV
'VVV
'
VVV
W\
TT
'UO(f\
i
1
#
ex
: ce
#
CBC4 C3 C2 C1
1 1
1 1
1 1
1 �---'----'
1 1
L---
--11---'-
--
.
--
1 I---'---11---'---11-___
J
---11---
CYL2
#
CE--
1 1 1 1 CG ---, 1 1 1 1--
1 1 1 1 1 1 1 1 CH#
CF�---..._--J
Figura 2.7: Control de velocidad paralelo de motores serie de corriente continua- Velocidad 6
#
cz
-R1
---
VV\
-
-
-
·
...----.--#
ex
C4 C3 C2 C1
L1
---
---,
#
CA'
1 1 1--
1'
' 1 '
1
'
1CD
--
1ce
#
CB' '
1
!... - - - - -...__ _ ___,
�---11----
--L- ---11----
--L----11---
---11---
CYL2
----
--
-
-
-
,
#
CE=cG
11 ' 1 1 1 1 1
--
1 1 1 ' 1 1 1 1 !... --- - -...._ _ __, CHFigura 2.8: Control de velocidad paralelo de motores serie de corriente continua - Velocidad 7
#
cz
-
N1 1 1 1 1 1 1 1 1 1 1 1
1 C4 C3
#
---
'VVv---:---rJ:A
-
-
-
--
�
#
ex
--
11 1 1 CA
ce
---,
--
1 1 1 1 1 1 1 1 CD#
CBC2 C1 !.. - - - - -..,__ _ ___,
L
----
-11-
----�----
ll
-
----
�
if
---
K-
---11---
CYL2
---
---,
#
CE 1 1 1 1--
1 1 1 CH--
1 CG#
CF 11 1
1 - - - -
-
-..,___
___,Figura 2.9: Control de velocidad paralelo de motores serie de corriente continua - Velocidad 8
27
2.4.1 Contactor: La N.E.M.A. (National Electrical Manufacturers Association)
define un contactor como un aparato que sirve para abrir y cerrar
repetidamente un circuito eléctrico de potencia. Un contactor magnético
funciona por medios electromagnéticos. La Figura 2.1 O muestra un contactor
de corriente continua, de 400 A, con terminales de arco, contactos
principales, bobina de soplado y bobina de accionamiento.
Categoría de servicio
La categoría de serv1c10 está relacionada con el poder de ruptura del
contactor. Las normas han determinado
5
categorías de servicio paraaplicaciones en corriente continua, que representan las condiciones más
corrientes de utiliz.ación y difieren por los poderes de ruptura exigidos.
Las categorías para corriente continua son:
DCl:
En funcionamiento normal: conexión y desconexión al 100 % de la corriente
nominal del aparato receptor.
En funcionamiento ocasional: conexión y desconexión al 150 % de la
corriente nominal del aparato receptor.
DC2:
En funcionamiento normal: conexión al 250 % de la corriente nominal
( constante de tiempo hasta 2 mseg) y desconexión al 100 % de la corriente
nominal ( constante de tiempo hasta 7 ,5 mseg) del aparato receptor.
En :funcionamiento ocasional: conexión y desconexión al 400 % de la
29
DC3:
En funcionamiento normal: conexión y desconexión al 250 % de la corriente
nominal ( constante de tiempo hasta 2 mseg) del aparato receptor.
En funcionamiento ocasional: conexión y desconexión al 400 % de la corriente nominal ( constante de tiempo hasta 2,5 mseg) del aparato receptor.
DC4:
En funcionamiento normal: conexión al 250 % de la corriente nominal ( constante de tiempo hasta 7 ,5 mseg) y desconexión al 100 % de la corriente nominal ( constante de tiempo hasta 1 O mseg) del aparato receptor.
En funcionamiento ocasional: conexión y desconexión al 400 % de la
corriente nominal ( constante de tiempo hasta 15 mseg) del aparato receptor.
DC5:
En funcionamiento normal: conexión y desconexión al 250 % de la corriente
nominal (constante de tiempo hasta 7,5 mseg) del aparato receptor.
En funcionamiento ocasional: conexión y desconexión al 400 % de la corriente nominal ( constante de tiempo hasta 15 mseg) del aparato receptor.
La constante de tiempo citada resulta del cociente entre la inductancia y la resistencia del circuito. Cabe acotar que en CC generalmente se emplean contactores unipolares. En función de la categoría de servicio, algunas aplicaciones son:
DCl: Cargas puramente resistivas o débilmente inductivas, para calefacción
eléctrica, por ejemplo.
DC2: Motores derivación, con desconexión a motor en rotación, nunca a
motor frenado.
DC3: Motores derivación, con desconexión a motor frenado, inversiones del
30
DC4: Motores serie, con desconexión a motor en rotación, nunca a motor
frenado.
DC5: Motores sene, con desconexión a motor frenado, inversiones del
sentido de giro.
Funcionamiento del contador.
El circuito que se quiere gobernar se conecta a los contactos principales. En
nuestro caso se trata de un contactor unipolar.
• Cuando la bobina del contactor queda excitada por la circulación de la
corriente, mueve el núcleo en su interior y arrastra el contacto,
estableciendo a través de los polos el circuito entre la red y el
receptor.
• Cuando la bobina deja de ser alimentada, abre los contactos.
• La bobina está concebida para resistir los choques mecánicos
provocados por el cierre y la apertura de los contactos y los choques
electromagnéticos debidos al paso de la corriente por sus espiras.
2.4.2 Controlador Lógico Programable (PLC): Se define así a toda máquina
electrónica, diseñada para controlar en tiempo real y en medio industrial
procesos secuenciales. Realiza funciones lógicas: series, paralelos,
temporizaciones, contajes y otras más potentes como cálculos, regulaciones,
etc. El PLC utilizado es el MicroLogixTM 1000 1761-L32BWB de Allen
-- '.
•
ii'tv#l!A
• ílUN
•
f'JiUL
-
f
áiflt.
Figura 2.11: Controlador Lógico Programable Allen Bradley, MicroLogix 1000 1761-L32BWB
32
Especificaciones generales:
Tipo de memoria: EEPROM de lK (aproximadamente 737
palabras de instrucción; 437 palabras de dato).
Tensión de fuente de alimentación: 20.4 - 26.4 VCC.
Uso de fuente de alimentación:
Ciclos de potencia:
Temperatura de operación:
7VA.
50 000 mínimo.
OºC a 55°C (32 ºF a 131 ºF) para el montaje
horizontal.
OºC a 45ºC (32 ºF a l 13°F) para el montaje
vertical.
Temperatura de almacenamiento: -40ºC a 85°C (-40ºF a 185°F).
Humedad de operación: 5 a 95% sin condensación.
Vibración:
De operación: 5 Hz a 2 KHz, 0.381 mm (0.015 pulg.) pico a pico/2.5 g,
montaje en panel, 1 hr por eje.
Fuera de operación: 5 Hz a 2 KHz, 0.762 mm (0.030 pulg.) pico a pico/5 g, 1
hr por eje.
Impacto:
De operación: Aceleración pico 10g (7.5 g montaje en riel DIN), (11±1 ms de
duración) 3 veces en cada dirección, cada eje.
Fuera de operación: Aceleración pico 20 g (11±1 ms de duración) 3 veces en
cada dirección, cada eje.
Certificación:
• Listado por UL.
• Marca CE para todas las directivas aplicables.
Par tornillo terminal: 0.9 N-m máximo (8.0 pulg-lbs)
Descarga electrostática: IEC801-2 a 8KV
33
Sensibilidad radiada: IEC801-3 a 10 V/m, 27 MHz - 1000 MHz
Fenómenos transitorios rápidos:
Aislamiento:
Especificaciones de entrada:
Cantidad de entradas:
Rango de voltaje:
Voltaje activado:
Voltaje desactivado:
Corriente activada:
Corriente desactivada:
excepto
3 V/� 87 MHz - 108 � 174 MHz - 230
MHz y 470 MHz - 790 MHz
IEC801-4 a fuente de al9imentación de 2 KV,
E/S; comunicación de 1 KV.
1500VCA
20
14 a 30VCC
14 VCC min.
24 VCC nominal
26.4 VCC máx. a 55°C (131ºF)
30.0 VCC máx. a 30ºC (86ºF)
5VCC
2.5 mA mín. a 15 VCC
8.0 mA nominal a 24 VCC
12.0 mA máx. a 30 VCC
Impedancia nominal: 3 Kohms
Capacidad nominal de contactos de relé:
Cantidad de salidas:
Tensión máxima:
Amperes continuos:
Volt-amperes:
12
24VCC
2.0A
28VA
34
2.4.3 Computador personal con software de programación: El software de
programación del PLC utilizado es el SLC-500 de Allen- Bradley (ver
Figuras 2.12 y 2.13). Los requerimientos mínimos del sistema son los
siguientes:
• Sistema operativo Windows 98, 98se, ME, NT4, SP3, 2000
• Procesador Pentium 100 MHz
• Memoria RAM de 64M bytes
• 800x600, 256-color
2.5 Formulación del programa de control
Mediante el uso del programa SLC-500 de Allen- Bradley instalado en una
computadora personal con los requerimientos mínimos indicados, se procedió a
formular mediante el uso de las instrucciones del software, las condiciones de
funcionamiento planteadas en la Tabla Nº 2.1.
37
Listado de Programa: Control de 02 motores de corriente continua
-Archivo procesador: ARRANQUE.ACH.
El listado que se muestra a continuación es el programa desarrollado para
efectuar el control de los 02 motores de corriente continua correspondientes a
una locomotora.
El programa ha sido elaborado mediante el uso del lenguaje escalera.
En el listado se muestra la secuencia lógica que realiza el PLC al efectuarse
cada acción de mando.
Las acciones de mando o contactos de entrada se encuentran denotadas en el
programa por las instrucciones asociadas a 1:0 y el número de entrada
correspondiente; los contactos de salida se encuentran denotados en el
programa por las instrucciones asociadas a 0:0 y el número de salida
correspondiente; las instrucciones denotadas por B3 y T4:* (donde
*
es elnúmero de temporizador empleado), son contactos y temporizadores lógicos
programados en el PLC para el propósito en particular.
Se observa en el programa, el uso de 07 entradas ( de las 20 disponibles en el
PLC elegido) y 09 salidas (de las 12 disponibles en el PLC elegido), así como
de 07 contactos y 1 O temporizadores lógicos.
Allen-Bradley Co. Software Serie 1747
APS Versión 5. 11
Utilidad de documentación Listando progr.
CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Archivo procesador: ARRANQUE.ACH
Marzo 12, 2003 - 15:34
CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Marzo 12, 2003 Página 1 Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:0
Renglón 2:0
Í-�ii�1
3=
1��i1---1
4 53
)-l
OB3
] [
Renglón 2:1
11 B3 I: O 0:0 11
Jl-J C-J [---< >-A
11 o 6 4 11
Renglón 2:2
Jl
-1 BJC-l I: Oe---<
B3 JI>-A
11 o 6 1 11
Renglón 2:3
11 B3 I : O B3 O O fl
Jl-1 C-1 c-11c---: Jl
11 O 6 2 ( )-5 11
Renglón 2:4
U B3 I: O To:: 11
A-] [--] [---�TEMP A LA CONEXION -(EN)-A
O 6 Temporizador T4: O -(DN)
Base Tiempo 1.0
Presel 8
Acum O
Renglón 2:5
U B3 T4:0 B3 0:0 Ü
A-][-][
�]/[-,---( )-A
1 DN B3 2 6
1 [
3
Renglón 2:6
U B3 T4 : O rTON 11
A-] [-] [---lTEMP A LA CONEXION-(EN)-A1 DN Temporizador T4:1 -(DN)
Base Tiempo 1.0
Presel 5
Acum o
Renglón 2:7
i-r'i-1 _T!
=
i-N-:'
�
1=
;�
:j-:.---?'
11
40
CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Marzo 12, 2003 Página 2 Listando progr. Archivo procesador: ARRANQUE.ACM Renglón 2:8
Renglón 2:8
U 83 T4: 1 I : O To:· 11
A-] [--] [--] [---ITEMP A LA CONEXION1-(EN)-A
1 DN 7 Temporizador T4:2-(DN) Base Tiempo 1.0
Presel 5
Acum O
Renglón 2:9
11 B3 T4 : 2 83 O: O 11
Jl-1 [-1 r-111---< )-A
11 1 DN 2 8 11
Renglón 2:10
U B3 T4 : 2 TO.. 11
A-] [--] [---�TEMP A LA CONEXION1-(EN)-A
1 DN Temporizador T4: 3 ,-.(DN)
Base Tiempo 1.0
Presel 5
Acum O
Renglón 2:11
11 B3 T4 : 3 83 O O 11
1-J c-1 [-JI[---: J.
U 1 DN 2 ( )-9 11
Renglón 2:12
Jl
83 T4 : 3 TO:: 11-] [-] [---lTEMP A LA CONEXIQN,-.(EN)-A
1 DN Temporizador T4 :4 '-(DN)
Base Tiempo 1.0
Presel 5
Acum O
Renglón 2:13
U 83 T4 : 4 I : O 11
A-][-][ � ] [---J ....,---8 ( 3 ) Á
1 � 8
-B3 T4:6 S
1 [-] [
5 DN
Renglón 2:14
l
B3 B3 T4 : 6 B3 11-J C-J C-J [---< )-A
11 1 5 DN 211
Renglón 2:15
U B3 T4:4 I:0 TO.. 11
A-] [--) [--] [---lTEMP A LA CONEXION'-(EN)-A1
DN 8 Temporizador T4:5 -(DN)
Base Tiempo 0.01
Presel 50
CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Marzo 12, 2003 Página 3 Listando progr. Archivo procesador: ARRANQUE,ACH Renglón 2:16
Renglón 2:16
U B3 T4 : 4 I : O TOF 11 A-] [-] [-] [---ITEMP A LA DESCONEX�(EN)-A
1 DN 8 Temporizador T4: 6 -(DN) Base Tiempo 1.0
Presel 1
Acum 1
Renglón 2:17
11 B3 T4:5 0:0 11
Jl-1 C-J [---< >-1
11 1 DN 10 11
Renglón 2:18
11 B3 T4:5 0:0 11
A-1 C-J [---< >-1
11 1 DN 11 11
Renglón 2:19
11 B3 T4:5 r-TO-- 11
A-) [--) (---� TEMP A LA CONEXION'--(EN)-l
1 DN Temporizador T4: 7 '--(DN)
Base Tiempo 1.0
Presel 7
Acum O
Renglón 2:20
U B3 T4:7 I:O B3 11
A-)(-)[-][---( )-l
JI
1 DN 9 3 lfRenglón 2:21
i
B3 T4 : 7 I : O TON 11-] [-) [-] [---1 TEMP A LA CONEXION'-(EN)-l
1 DN 9 Temporizador T4:8 '-(DN)
Base Tiempo 1.0
Presel 7
Acum O
Renglón 2:22
i
B3 · T4:8 B3 11
-] [-] [---( )-l
11 1 DN 4 11
Renglón 2:23
U
1:0 1:0 B3 11
A-]/[
�) [-r---( )-A
4 5 9
B3
l [
42
CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Marzo 12, 2003 Página 4
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:24
Renglón 2:24
11 B3 To:; lf
A-] (---�TEMP A LA. CONEXION .-( EN)-A
9 Temporizador T4: 13 .-(DN)
Base Tiempo 0.01
Presel 70
Acum O
Renglón 2:25
U T4: 13 O: O 11
A-] [---( )-A
11 DN 1 11
Renglón 2:26
Jl,---1
ENDt---1CONTROL DE 02 MOTORES DE CORRIENTE CONTINUA Marzo 12, 2003
Listando progr. Archivo procesador: ARRANQUE.ACH
RESUMEN OPCIONES REPORT
Asegurar Info Válida X-Ref: Modo Gráfico:
Ancho Página: Longitud Página: Archivo Inicial: Archivo Final: Línea potencia:
Comentarios dirección: Display Dirección:
Comentarios Renglón:
Ref.Cruzada en diag. escalera:
SI SI 80 66 2 15 SI NO NO NO NING
43
44
• Listado de Programa con referencia cruzada: Control de 02 motores de
corriente continua - Archivo procesador: ARRANQUE.ACH
En el listado que se muestra a continuación, se observa los mismos reglones
con instrucciones, mostrados en el listado anterior; mostrando además, cada
una de las instrucciones utilizadas en el reglón de programación
correspondiente ( contactos abiertos, contactos cerrados, bobinas,
temporizadores con retardo a la conexión, temporizadores con retardo a la
desconexión) y señala la ubicación de estas en cada uno de los reglones en los
que se encuentra incluido. Lo cual hace posible una verificación más rápida
Allen-Bradley Co.
Software Serie 1747 APS Versión 5.11
Utilidad de documentación Listando progr.
Archivo procesador: ARRANQUE.ACH Febrero 24, 2003 - 22:00
+---+
46
Febrero 24, 2003 Página 1
Archivo procesador: ARRANQUE.ACH Renglón 2:0
Listando progr.
Renglón 2:0
I:0 I:O I:0 B3
-)/ [-+-) [-+-]/ [---(
)-3
1
B3 4
1
5 O+-] [-+
B3/0
-] [- 2:0 2:1 2:2 2:3 2:4
-( )- 2:0 I:0/3
-]/[- 2:0
I:0/4
-] [- 2:0 -)/[- 2:23 I:0/5
-] [- 2:23 -]/[- 2:0
Renglón 2:1
1 -) [-) [---(: )-B3 I:0 O O 1
B3/0
I:0/6
0:0/4
º 6 4
-] [- 2:0 2:1 2:2 2:3 2:4 -( )- 2:0
-) [- 2:1 2:2 2:3 2:4
-( )- 2:1
Renglón 2:2
1 -] [-º -] (-6---( )� B3 I:O B3 1 B3/0
B3/1
I:0/6
-] [- 2:0 2:1 2:2 2:3 2:4
-( )- 2:0
-] [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
47
Febrero 24, 2003 Página 2
Archivo procesador: ARRANQUE.ACH Renglón 2:3 Listando progr.
Renglón 2:3
1 -] [-] [-]/[---(. )-B3 I:O B3
°·
0 1B3/0
B3/2
I:0/6
0:0/5
º
6 2 5-J [- 2:0 2:1 2:2 2:3 2:4
-( )- 2:0
-]/[- 2:3 2:5 2:7 2:9 2:11
-( )- 2:14
-] [- 2:1 2:2 2:3 2:4
-( )- 2:3
Renglón 2:4
B3 I:0 +TON---+
-] [--] [---.'TEMP A LA
CONEXION+-(EN)-0 6 Temporizador T4:0+-(DN)
B3/0
-J
[- 2:0
-( )- 2:0
I:0/6
-) (- 2:1 T4:0
-TON- 2:4
2:1 2:2 2:3
2:2 2:3 2:4
2:4
Base Tiempo 1.0
,
Presel 8
Acum O
Renglón 2:5
B3 T4:0 B3
-) [-] [-+-)/[
---r�-B3/1
B3/2
1 DN
I
B3 2
1
6+-) [-+
.3
-J [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
48
Febrero 24, 2003 Página 3
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:6
B3/3
0:0/6
T4:0/DN
Renglón 2:6
83 T4:0
-J [-] [
-]
[--(
)--(
)--J [-2:5 2:20
2:5
2:5 2:6
+TO1N---+
---+TEMP A LA C0NEXI0N+-(EN) 1 DN Temporizador T4:l+-(DN)
B3/1
T4:0/DN
T4:l
Renglón 2:7
Base Tiempo
1.ogl
Presel Acum
-J [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
-J [- 2:5 2:6
-TON- 2:6
B3 T4:l I:O 83 0:0
-) [-] [-] (-+-)/(-1---(
)-1 DN 7
1 83 2 1 7
B3/1
B3/2
B3/4
I:0/7
+-] [-+
-] [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
-J/[- 2:3 2:5 2:7 2:9 2:11 -( )- 2:14
-J [- 2:7
-( )- 2:22
49
0:0/7
-( )- 2:7 Febrero 24, 2003 Página 4
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:8
T4:1/DN
-}
e-
2:7 2:8Renglón 2:8
B3 T4: 1 I: O +TO---+
-J [-) [-) [---+TEMP A LA
CONEXION+-(EN)-1 DN 7 Temporizador T4:2+-(DN)
B3/1
I: 0/7
Base Tiempo 1.0
�1 Presel
Acum
+---·+
-} [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
-) [- 2:7 2:8 T4:1/DN
-J [- 2:7 2:8
T4:2
-TON- 2:8
Renglón 2:9
1 B3 T4:2 B3 O O
1
-J [-) [-)/[---(:
)-B3/l
B3/2
O:0/8
1 DN 2 8
-) [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2 :2
-]/[- 2:3 2:5 2:7 2:9 2:11
-( )- 2: 14
-( )- 2:9 T4:2/DN
-J [- 2:9 2:10
Renglón 2:10
B3 T4: 2 +To---+
-J [-) [---+-'TEMP A LA
CONEXION+-(EN)-1 DN Temporizador T4:3+-(DN)
Base Tiempo 1.0
Presel 5
50
Febrero 24, 2003 Página 5
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:11
B3/1
-]
-( [-
)-2 5 )-2:6 )-2:7 )-2:8 )-2:9 )-2:10 )-2:11 )-2:1)-2 )-2:13 )-2:14 )-2:15 )-2:16 )-2:17 2 18 2:19 2:20 2:21 2:22
2 2
T4:2/DN
-] [- 2:9 2:10
T4:3
-TON- 2:10 Renglón 2: 11
1 -J [-) [-}/(---(. )-B3 T4:3 B3 O•O 1
B3/1
B3/2
0:0/9
1 DN 2 9
-] [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
-]/[- 2:3 2:5 2:7 2:9 2:11 -( )- 2: 14
-( )- 2:11
T4:3/DN
-J [- 2: 11 2: 12
Renglón 2:12
B3 T4: 3 +TO•»---�
-J [-] [---+TEMP A LA
CONEXION+-(EN)-B3/1
1 DN Temporizador T4:4+-(DN)
Base Tiempo 1.0 ,
Presel 5
Acum O
-) [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
T4:3/DN
-J [- 2:11 2:12
T4:4
51
Febrero 24, 2003 Página 6
Archivo procesador: ARRANQUE.ACH Renglón 2:13
Listando progr. Renglón 2:13
B3 T4:4 I:0 B3
-] [-] [-+-) [----+---(
)-1 DN 1 8
1 5
B3/1
B3/5
I:0/8
T4:4/DN
T4:6/DN
B3 T4:6
+-] [-) [-+
5 DN
-]
e-
2:5 2:18 2:6 2:19 2:7 2:20 2:8-( )- 2:2
-] [- 2:13 2:14
-( )- 2: 13·
-]
e-
2:13 2:15 2:16-] [- 2:13 2:15 2:16
-]
e-
2:13 2: 142:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17
2:21 2:22
Renglón 2:14
1 B3 B3 T4:6 B3
1 -] [-] [-] [---( )-2
1 5 DN
B3/1
B3/2
B3/5
-) [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2
-J/[- 2:3 2:5 2:7 2:9 2:11 -( )- 2:14
-) [- 2:13 2:14
-( )- 2:13 T4:6/DN
-] [- 2:13 2:14
Renglón 2:15
B3 T4:4 I:0 +TON---+
-] [-] [-] [---4'TEMP A LA CONEXION+-(EN)-1 DN 8
Temporizador T4:5+-(DN) Base Tiempo 0.01
1
Presel 50
52
Febrero 24, 2003 Página 7
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:16
B3/1 -] -( I:0/8 -) T4:4/DN -) T4:5 [- )-
[-2 5 [-2:6 [-2:7 [-2:8 [-2:9 [-2:10 [-2:11 [-2:1[-2 [-2:13 [-2:14 [-2:15 [-2:16 [-2:17 2 18 2:19 2:20 2:21 2:22
2 2
2:13 2:15 2:16
2:13 2:15 2:16
-TON- 2:15 Renglón 2:16
83 T4: 4 I: O +TOF'---+
-) [-) [-) [---+TEMP A LA
DESCONEX+-(EN)-1 DN 8 Temporizador T4:6+-(DN)
Base Tiempo 1.0 �1
83/1
I:0/8
T4:4/DN
T4:6
Renglón 2:17
-) [-] [
Presel
Acum
-) [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2: 2
-) [- 2:13 2:15 2:16
-) [- 2:13 2:15 2:16
-TOF- 2:16
( )-1 B3 T4:5
l DN 0:0 1 10 B3/1 -) -( 0:0/10 -( T4:5/DN -)
e-)-
e-2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
2:2
2:17
53
Febrero 24, 20 0 3 Página 8
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:18
Renglón 2:18
1
B3 T4 : 5 O• O
1
-] (-] [---(.
)-1 DN 11
B3/1
0:0/11
-] [- 2 5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2 18 2:19 2:20 2:21 2:22
-( )- 2 2
-( )- 2:18
T4:5/DN
-] [- 2:17 2:18 2:19
Renglón 2:19
B3 T4:5 +TO---•
-] [--] [---+TEMP A LA
CONEXION+-(EN)-B3/1
1 DN Temporizador T4:7 +-(DN)
Base Tiempo 1.
0
0
71
Presel
Acum
-) [- 2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
-( )- 2:2 T4:5/DN
-1
e-
2:11 2:10 2:19T4:7
-TON- 2:19
Renglón 2:20
-) (-] [-) [
1 B3 T4:7 I:0
1 DN 9
---1
3
>;-I
B3/1 -) -( B3/3 -] -( I:0/9 -J T4:7/DN -) [- )- [- )-[-2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
2:2
2:5 2:20
2:20 2:21
54
Febrero 24, 20 0 3 Página 9
Archivo procesador: ARRANQUE.ACH Renglón 2:21
Listando progr. Renglón 2:21
B3 T4 : 7 I : O +TO +
-] [-] [-] [---+TEMP A LA
CONEXION+-(EN)-1 DN 9 Temporizador T4:8+-(DN)
B3/1
I:0/9
T4:7/DN
T4:8
Renglón 2:22
-] (-] [
Base Tiempo 1.
7 0 0 1 Presel Acum +---...
-] [- 2 5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2 18 2:19 2:20 2:21 2:22
-( )- 2 2
-1
e-
2:20 2:21-1
e-
2:20 2:21-TON- 2:21
1 B3 1 T4:8
DN ---� 3 )�1 B3/1 -) -( B3/4 -J -( (-
)-e-
)-2:5 2:6 2:7 2:8 2:9 2:10 2:11 2:12 2:13 2:14 2:15 2:16 2:17 2:18 2:19 2:20 2:21 2:22
2:2
2:7 2:22 T4:8/DN
-] [- 2:22
Renglón 2:23
I:0 I:0 B3
-]/ [-+-) [-t---( )-4
1 B3 S 1 9
B3/9
I:0/4
+-) [-+
9
-J (- 2:23 2:24
-( )- 2:23
55
Febrero 24, 2003 Página 10
Listando progr. Archivo procesador: ARRANQUE.ACH Renglón 2:24
I:0/5
-]
e-
2:23-)/[- 2:0
Renglón 2:24
B3 +TON
-) [ +TEMP A LA
CONEXION+-(EN)-9 Temporizador T4:13+-(DN)
Base Tiempo 0.01 1
Presel 70
Acum o
+ +
B3/9
-] [- 2:23 2:24
-( )- 2:23
T4:13
-TON- 2:24
Renglón 2:25 1
T4: 13 0:0
1
-] [ (
)-DN 1
0:0/1
-( )- 2:25 T4:13/DN
-]
e-
2:25r•gl6n 2,26
Listando progr. Archivo procesador: ARRANQUE.ACH Febrero 24, 2003 RESUMEN OPCIONES REPORT
Asegurar Info Válida X-Ref: Modo Gráfico:
Ancho Página:
Longitud Página:
Archivo Inicial: Archivo Final: Línea potencia:
Comentarios dirección:
Display Dirección:
Comentarios Renglón:
Ref.cruzada en diag. escalera:
SI
NO 80
66
2
15
SI
SI SI SI TODOS
56
CAPÍTULO 111
EVALUACIÓN TÉCNICO-ECONOMICA PARA LA IMPLEMENTACION
DEL SISTEMA DE CONTROL
3.1 Evaluación técnica de la solución planteada:
• El PLC es un equipo electrónico dotado de interfases de entrada y de salid�
programable en su operación a través de un software.
• El sistema soporta condiciones eléctricas y ambientales variables,
características de la industria.
• Es un sistema flexible y confiable, que elimina los altos costos de
mantenimiento y reemplazo de dispositivos en contraposición a la solución
que significaba instalar un sistema electrónico de aplicación especifica, como
el original.
• El PLC elegido para dar solución al problema cuenta con 20 entradas de
contacto seco (se requieren sólo 07), por lo cual, se tiene 13 entradas de
contacto seco adicionales, disponibles para un uso futuro o reprogramación
58
• El PLC elegido para dar solución al problema cuenta con 12 salidas tipo relé
(se requieren sólo 09), por lo cual, se tiene 03 salidas tipo relé adicionales,
disponibles para un uso futuro o reprogramación para características
adicionales de funcionamiento.
3.2 Evaluación económica de la solución planteada:
• El reemplazo del circuito electrónico para el control de la locomotora, que
estaba averiado, tiene una demora de 03 meses, por la importación, y un costo
aproximado de US$ 5000 más el I.G.V. (18%). Este tiempo resulta excesivo,
pues la empresa minera sólo cuenta con O 1 locomotora adicional, que dadas
las nuevas circunstancias, deberá funcionar en forma continua, por lo cual, las
posibilidades de falla se ven incrementadas.
• Una locomotora puede efectuar un viaje de ida y vuelta extrayendo mineral
(Zinc, Plomo) en aproximadamente 45 minutos; en cada viaje puede extraer
120 toneladas de mineral, es decir, 3 840 toneladas de minerales al día. El
tener la segunda locomotora averiada significaría el no extraer
aproximadamente 3 840 toneladas de mineral al día, durante el tiempo que no