Estrategia de control PD Borroso+I para un robot paralelo de dos grados de libertad
63
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Estrategia de control PD-Borroso+I para un robot paralelo de dos grados de libertad. Autor: Andrés Alejandro Feitó Marcheco. Tutores: Ing. Dianelis García Llerena Dr. Boris L. Martínez Jiménez Msc. Orlando Urquijo Pascual. Santa Clara 2015 "Año 57 de la Revolución".
(3) i. PENSAMIENTO. ¨ Los que sembraron con lágrimas, con regocijo segarán ¨ Salmos 126:5.
(4) ii. DEDICATORIA. Dedico esta tesis a mi madre Edelsa, por su apoyo incondicional en todo momento, gracias a ella estoy aquí. A mi abuela Nelia por darme fuerzas cuando más lo necesité, donde quiera que estés, para ti. A mi padre por dedicarme toda su vida a prepararme para la vida. A mi musa Denices para ti también..
(5) iii. AGRADECIMIENTOS. Agradezco a mi madre, a mi padre, a toda la familia que me ha apoyado, a Denices gracias por la inspiración, a Bertica, Daniela, Manolito. A mi hermano Alfredo, a Eduardo, Yojaner, Michel, Pacho, Lisán. A mi amigo Cleyton. A mi familia de la vida, la vieja María, Oneida, Lisandra, Arasay, Ramos, Lianni, José Manuel, María. Agradecimientos especiales para mis tutores, Urquijo, Boris, Dianelis, gracias por la paciencia. Gracias a toda mi familia, mi abuelo Marcheco, a los de Holguín. A mis compañeros de mis dos aulas. A los del 117, a Oscarito. Y para todos mis amigos y a todos los que han hecho posible que llegue hasta aquí. GRACIAS.
(6) iv. RESUMEN. Los simuladores de conducción, además de ser usados para la capacitación y entrenamiento de potenciales conductores de vehículos, tienen variadas y crecientes aplicaciones en juegos y entretenimientos. Dichas plataformas permiten el entrenamiento del personal y se minimiza así el uso de vehículos reales, con el consiguiente ahorro de recursos. Además evitan posibles accidentes de los principiantes en condiciones de peligrosidad. El Grupo de Automática Robótica y Percepción (GARP) tiene la tarea de desarrollar estrategias de control para sistemas no lineales aplicados en robots paralelos empleando actuadores electro-neumáticos, los cuales son más baratos pero a la vez más difíciles de controlar. En este trabajo se expone la estrategia de control inteligente PD-Borroso+I por la efectividad del mismo ante elementos altamente no lineales y para suavizar los mandos y así proteger las válvulas y pistones neumáticos. Los resultados obtenidos mediante simulación demuestran las potencialidades de dicho algoritmo de control..
(7) v TABLA DE CONTENIDOS. PENSAMIENTO ..................................................................................................................... i DEDICATORIA ..................................................................................................................... ii AGRADECIMIENTOS ......................................................................................................... iii RESUMEN............................................................................................................................. iv INTRODUCCIÓN ..................................................................................................................1 CAPÍTULO 1.. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. ...............4. 1.1. Desarrollo de los robots paralelos. ...........................................................................4. 1.2. Características de los robots paralelos. ....................................................................5. 1.2.1 1.3. Campo de aplicación. ........................................................................................7. Tipos de actuadores. .................................................................................................8. 1.3.1. Actuadores neumáticos de desplazamiento lineal. ............................................8. 1.4. Modelado de pistones neumáticos............................................................................9. 1.5. Identificación experimental para pistones neumáticos. ..........................................11. 1.6. Estrategias de control convencional para robots paralelos utilizando pistones. neumáticos. .......................................................................................................................12 1.7. Control basado en lógica borrosa y PID Borroso...................................................13. 1.8. Técnicas borrosas aplicadas a actuadores neumáticos. ..........................................14. 1.9. Consideraciones parciales ......................................................................................15. CAPÍTULO 2.. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE. DOS GRADOS DE LIBERTAD. .........................................................................................17 2.1. Características técnicas de la plataforma de pruebas. ............................................17. 2.2. Modelo Analítico de los actuadores electro-neumáticos........................................19.
(8) vi 2.3. Identificación experimental. ...................................................................................21. 2.4. Sistemas de inferencia borrosos. ............................................................................24. 2.4.1 Sistemas tipo Mamdani. .......................................................................................24 2.4.2 Sistemas tipo Takagi-Sugeno-Kang.....................................................................25 2.5. Controlador PID-Borroso. ......................................................................................27. 2.5.1 Estructura y diseño de un controlador borroso. ...................................................28 2.5.2 Diseño del PID como controlador borroso. .........................................................29 2.5.3 Estructuras de los controladores PID-borrosos ....................................................31 2.5.4 Procedimiento de diseño de un controlador PID borroso ....................................35 2.6. Consideraciones Parciales ......................................................................................36. CAPÍTULO 3.. Control PID Borroso ................................................................................37. 3.1 Ajuste del PID por Ziegler y Nichols. ........................................................................37 3.2 Ajuste del PID- Borroso..............................................................................................38 3.3 Simulación de un control PID y control Borroso con el modelo lineal. .....................41 3.4. Análisis económico ................................................................................................48. 3.5. Consideraciones finales ..........................................................................................49. CONCLUSIONES y RECOMENDACIONES ....................................................................50 Conclusiones .....................................................................................................................50 Recomendaciones..............................................................................................................50 REFERENCIAS BIBLIOGRÁFICAS..................................................................................52.
(9) INTRODUCCIÓN. 1. INTRODUCCIÓN. El tema del control de posicionamiento de los actuadores neumáticos utilizados en las plataformas de simulación es objeto de estudio de numerosos científicos e investigadores. El controlador PID (Proporcional - Integral - Derivativo) constituye el algoritmo de control más usado en las aplicaciones industriales. El desempeño de estos controladores es muy bueno si los parámetros de la dinámica de la planta no varían en el tiempo. Debido a la compresibilidad del aire, zonas muertas y fuerzas de fricción presentes en los sistemas neumáticos la dinámica de estos actuadores presenta fuertes características no lineales las cuales provocan la variación de sus parámetros en el tiempo. Estas son las principales causas que limitan la aplicación de los PID clásicos en estos sistemas (Krivts & Krejnin, 2006). El control inteligente ha ganado considerable atención en los últimos años, llamado de esta manera para diferenciarlo del control convencional, ya que no emplea métodos y teorías sobre sistemas dinámicos de control cuyo comportamiento es descrito por ecuaciones diferenciales. Hay tres ramas básicas en las que se puede dividir esta forma de control: sistemas expertos basados en conocimiento (expert systems), lógica borrosa (fuzzy logic) y redes neuronales (neural networks). El control que emplea la lógica borrosa ha sido intensamente estudiado, numerosos resultados teóricos y aplicaciones se han evidenciado en diferentes países como Japón, Estados Unidos, Alemania para mencionar unos pocos (Moreno, 2000). El mismo, llamado control borroso constituye una buena herramienta en el campo de los sistemas de procesos no lineales pues se basa en el conocimiento adquirido por el humano para lograr el control sin necesidad alguna de tener un modelo matemático detallado (Yurkovich, 1998). La lógica borrosa tiene una gran simplicidad en el trabajo con problemas complejos como lo son las no linealidades, aspecto común en los robots paralelos. Por medio de reglas.
(10) INTRODUCCIÓN. 2. semánticas establecidas por un experto, se puede compensar los parámetros desconocidos de un modelo, manejar las no linealidades y combinar esto con la robustez de técnicas convencionales como el PI y el PID (Gutierrez, 2003). La aplicación de técnicas borrosas al control de posición para sistemas electro-neumáticos es ventajosa en términos de simplicidad del diseño y puesta en práctica, además de reducir el tiempo requerido para el desempeño del sistema. La experiencia demuestra que el éxito de técnicas borrosas depende del nivel de conocimiento referente al comportamiento de posicionamiento continuo. No obstante, a veces no se garantiza la estabilidad y robustez del sistema con el control borroso (LEE, 1995). A partir de las necesidades del Centro de Investigación y Desarrollo de Simuladores CDSIM (SIMPRO), del Ministerio de la Fuerzas Armadas Revolucionarias en el marco de la Tarea Triunfo, y en conjunto con el Grupo de Automatización, Robótica y Percepción (GARP) de la Universidad Central “Marta Abreu” de Las Villas se han desarrollado prototipos de simuladores para uso en el entrenamiento y capacitación de personal en la conducción de vehículos, así como juegos virtuales. SIMPRO se ocupa de la parte constructiva del vehículo, mientras que el GARP, aprovechando su experiencia en este campo trabaja en el desarrollo de algoritmos de control que logren satisfacer los requerimientos del sistema (Aracil, Saltarén, & Reinoso, 2003; García Llerena, Prieto, Cazarez-Castro, & Cardenas-Maciel, 2014; Urquijo, 2014). Algunos fabricantes apuestan por el uso de la tecnología neumática en robots paralelos. Los actuadores neumáticos de desplazamiento lineal tienen una amplia utilización industrial por ser una tecnología limpia, de bajo costo, respuesta rápida y fácil mantenimiento. En los últimos años estos actuadores se han venido introduciendo en aplicaciones que requieren posicionamiento continuo tales como: robots paralelos y plataformas de simulación (A. E. Rubio, Hernández, Aracil, Saltarén, & Guerra, 2008). La dinámica de los actuadores electroneumáticos es altamente no lineal, debido a la compresibilidad del aire, la baja viscosidad del gas y el comportamiento no lineal del flujo de aire a través de las válvulas. Ello, unido a la existencia de fuerzas de fricción estáticas y dinámicas entre el cilindro y el pistón, provoca serias perturbaciones al sistema y dificulta el control de los mismos..
(11) INTRODUCCIÓN. 3. El problema científico se enfoca entonces en: ¿Cómo implementar un algoritmo de control borroso que permita atenuar el efecto de los cambios en los parámetros en los sistemas neumáticos?. Objetivo general: Evaluar el desempeño de estrategias de control borroso (fuzzy control) en una plataforma robótica paralela de 2GDL.. Objetivos específicos: -Analizar las características generales, estrategias y resultados obtenidos en el control de actuadores neumáticos utilizando las técnicas de control inteligente borroso. - Establecer los pasos a seguir para el diseño de la estrategia de control borroso para la plataforma de 2GDL. - Diseñar la estrategia de control seleccionada a partir del modelo dinámico del sistema. - Evaluar mediante simulación el desempeño del algoritmo de control.. Organización del informe: La investigación incluye tres capítulos, además de la introducción,. conclusiones,. recomendaciones,. referencias. bibliográficas. y. anexos. correspondientes. Los temas que se abordan en cada capítulo se encuentran estructurados de la forma siguiente:. Capítulo I: En el primer capítulo se realiza el análisis crítico de la literatura especializada consultada. Se ofrece una panorámica sobre las principales características de los robots paralelos, aplicaciones, así como los elementos actuadores empleados en su construcción. Se presenta un estudio comparativo sobre las principales metodologías aplicadas al control de sistemas neumáticos.. Capítulo II: El segundo capítulo se utilizará para detallar los principales elementos que hacen al sistema altamente no lineal. Se establecen los pasos para el diseño e implementación del algoritmo de control borroso hasta llegar al diagrama de bloques correspondiente.. Capítulo III: Este capítulo se dedicará a expresar los resultados de la validación mediante simulación de la efectividad del método empleado..
(12) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 4. CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL.. En este capítulo se describe el desarrollo de los robots paralelos a lo largo de la historia hasta la actualidad. Las características de estos son detalladas, se identifican las diferentes topologías a encontrar y son mencionadas las principales aplicaciones en las cuales son empleados estos robots. Se muestran los diferentes tipos de actuadores y su clasificación, se profundiza en los actuadores neumáticos de desplazamiento lineal, de los cuales son descritas las características que dificultan su control. Para hallar el modelo lineal de los pistones neumáticos se nombran las partes que influyen en él, y son mostradas vías de diferentes autores para llegar al modelo más exacto. Se detallan los diferentes métodos de identificación propuestos por los autores. y son mencionadas diferentes estrategias de control. convencionales propuestas por los autores para robots paralelos utilizando pistones neumáticos. Para concluir el capítulo se hace una breve reseña del desarrollo del control basado en lógica borrosa, así como el PID-Borroso y su aplicación a los actuadores neumáticos. 1.1. Desarrollo de los robots paralelos.. Los robots paralelos son aquellos los cuales su estructura mecánica, que une la base fija con el elemento terminal, está compuesta por múltiples e independientes cadenas cinemáticas cerradas, donde como mínimo una es actuada (Merlet, 2006). Estos poseen mayor fortaleza en su estructura debido a que cada elemento está soportado en varios puntos, también las propias extremidades del robot tienen función de sostén estructural y de actuadores..
(13) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 5. El área de los simuladores de movimiento sentó las bases para la investigación y el desarrollo de los robots paralelos. En el año 1931, James E. Gwinnett patentó el primer mecanismo paralelo conocido. Consistía en una plataforma de movimiento para la industria del entretenimiento, la cual nunca llegó a realizarse físicamente (Ilian Bonev, 2003). Años más tarde surge el primer robot industrial conocido, el cual consistía en un robot paralelo de 5GDL destinado a la pintura con spray, el cual nunca llegó a realizarse (Ilian Bonev, 2003) (Aracil et al., 2003). En 1947 V.E. Gough ideó un robot paralelo con seis actuadores lineales en forma de un octaedro de 6GDL, el cual fue utilizado por la empresa Dunlop para la prueba de neumáticos de aviación (I Bonev, 2003) (Zabalza & Ros, 2007). En 1965 D. Stewart presentó en un artículo una plataforma con 6 GDL para su utilización como simulador de vuelo, el cual es considerado uno de los primeros análisis de plataformas paralelas (I Bonev, 2003) (Zabalza & Ros, 2007). Por esta misma fecha Klaus Cappel realizaba varias investigaciones en plataformas paralelas de 6 GDL, como un simulador de movimiento basado en un hexápodo, el cual fue construido al igual que varios de sus experimentos (I Bonev, 2003). En 1978 K.H. Hunt sugirió que se usaran los mecanismos actuados de forma paralela para robots manipuladores, y señaló el requerimiento de un estudio más profundo debido a sus ventajas en cuanto a rigidez y precisión con respecto a los robots series convencionales (Aracil et al., 2003). En 1983 presentó un manipulador paralelo de 6 GDL accionado por actuadores giratorios. En la actualidad los robots paralelos son empleados en una amplia gama de aplicaciones, su uso va en aumento debido a las ventajas en precisión, repetitividad y elevada fuerza, apoyado por el aumento en la capacidad de cómputo de nuevos procesadores.. 1.2. Características de los robots paralelos.. La expresión robot paralelo identifica y diferencia a los robots de cadena cinemática cerrada de los robots de cadena cinemática abierta (robots serie). El término paralelo se introduce en el sentido topológico más que por carácter puramente geométrico, ya que los actuadores accionan en conjunto o de manera paralela, sin embargo nada tiene que ver con la existencia de elementos alineados paralelamente (F. Wobbe, M. Kolbus, & W Schumacher, 2008)..
(14) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 6. La topología o arquitectura de un mecanismo paralelo se establece como las articulaciones, conexiones, acoplamientos y actuadores que están estructurados para lograr un determinado movimiento. Existen innumerables configuraciones estructurales para los robots paralelos. Las combinaciones de número de cadenas cinemáticas, tipo de las mismas y restricciones en el movimiento de las articulaciones hacen prácticamente imposible un análisis generalizado de las estructuras de los robots paralelos. El investigador francés Jean Pierre Merlet ha sido el autor que más profundamente ha estudiado dichas configuraciones. En principio, y según el tipo de movimientos que son capaces de realizar, se pueden distinguir dos grupos: los robots planares y los espaciales (Merlet, 2006).. Figura1.1. Robots planares Los robots planares son aquellos en los cuales su movimiento se reduce al plano por lo que pueden tener de dos a tres grados de libertad, correspondientes a dos traslaciones en el plano y una rotación sobre un eje perpendicular a dicho plano. Estos mecanismos presentan tres cadenas cinemáticas independientes que se encuentran unidas a la plataforma móvil y a la tierra mediante tres puntos, por consiguiente se pueden considerar de manera general como plataformas móviles triangulares (Merlet, 2006).. Fig 1.2.Robots espaciales..
(15) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 7. Los robots espaciales son aquellos que experimentan su movimiento en todo el espacio tridimensional y no en un plano, es decir; se pueden trasladar y girar en los tres ejes de coordenadas, esto le confiere de tres a seis grados de libertad (Merlet, 2006).. 1.2.1. Campo de aplicación.. Entre las principales aplicaciones de los robots paralelos en la actualidad figuran las aplicaciones espaciales, los simuladores de vuelos y de conducción de vehículos, la colocación u orientación de elementos mecánicos como son la orientación de grandes antenas, aplicaciones industriales como máquinas herramienta y centros de ensamblaje, aplicaciones médicas y otras donde se requiera el empleo de dispositivos de alta precisión, velocidad elevada y alta capacidad de carga (Merlet, 2006) (Dominguez Velazco, 2007).. Figura 1.3. Aplicaciones de la robótica paralela. La exactitud que es posible lograr con los robots paralelos en el posicionamiento del elemento final es utilizada en el campo de la medicina, específicamente en la cirugía (oftalmología y neurocirugía), para lograr suturas precisas. Esta característica también es aprovechada en la industria de componentes electrónicos debido a la necesidad de una alta precisión en la soldadura por puntos de los componentes electrónicos..
(16) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 1.3. 8. Tipos de actuadores.. Un mecanismo puede ser operado manualmente, o por medio de un dispositivo impulsor para generar el movimiento deseado. A estos dispositivos que se encargan de producir las fuerzas y/o torques para mover las estructuras mecánicas, se les denomina actuadores. En la robótica, los más usados son clasificados de acuerdo a los siguientes criterios (Yañez, 2007): Según el tipo de movimiento generado: es posible usar actuadores lineales, los cuales desarrollan una fuerza y generan un movimiento de traslación en una misma dirección. También se usan los actuadores de rotación; estos desarrollan un par y generan un movimiento de rotación respecto al eje de torque. Según la naturaleza de la fuente primaria de energía. Se dispone de: actuadores neumáticos; que desarrollan su potencia a partir del fluido del aire comprimido. Actuadores hidráulicos; que su potencia se basa en el fluido hidráulico presurizado y, los más modernos, actuadores eléctricos.. 1.3.1. Actuadores neumáticos de desplazamiento lineal.. A los mecanismos que convierten la energía del aire comprimido en trabajo mecánico se les denomina actuadores neumáticos. La energía neumática que emplea aire comprimido como fuente de potencia tiene cualidades excelentes, propias del elemento de base (Krivts & Krejnin, 2006; A. E. Rubio et al., 2008), entre estas cualidades podemos destacar: - No están sujetos a las limitantes de temperatura de los fluidos hidráulicos. - Los gases de escape no necesitan ser recogidos. - Las líneas de retorno para líquido son innecesarias y el almacenamiento a largo plazo no es un problema porque los actuadores neumáticos son virtualmente secos y no necesitan de materiales orgánicos. - Los actuadores neumáticos tienen un menor peso específico. - Son de fácil uso y mantenimiento. - Presentan una tecnología simple y de bajo costo. - Son limpios, seguros y fáciles de instalar..
(17) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 9. Los actuadores neumáticos presentan características que dificultan considerablemente el control de su posición en aplicaciones donde se requiera el posicionamiento de la carga en cualquier parte de la carrera posible del cilindro. Algunas características que hacen que la dinámica de los actuadores neumáticos sea altamente no lineal son (A. E. Rubio et al., 2008): - La compresibilidad del aire. - El comportamiento no lineal del flujo de aire a través de las válvulas. - La existencia de elevadas fuerzas de fricción estáticas y dinámicas entre el cilindro y el pistón. Otras dificultades en el control servo-neumático están dadas por la presencia de posibles disturbios provenientes de fugas en las válvulas. Además, la incertidumbre en los parámetros del sistema hace que el diseño de los controladores sea problemático (Song, Bao, & Y., 1997). 1.4. Modelado de pistones neumáticos.. Los actuadores electro-neumáticos están formados por un cilindro neumático, al cual se le acopla directamente la carga, y una o varias válvulas electro-neumáticas conectadas a las cámaras del cilindro. Para su modelación suelen dividirse en tres subsistemas (A. E. Rubio et al., 2008): - Modelo de la válvula: Contempla la dinámica del flujo de aire a través de la válvula en función de la acción de control y las presiones en sus extremos. - Modelo del actuador: Contempla la dinámica de las presiones en las cámaras del cilindro en función del flujo de aire y los volúmenes de las cámaras del cilindro, así como sus variaciones. Estos dos últimos parámetros quedan definidos por la posición y velocidad del émbolo (y, por tanto, de la carga) si se conoce el área de sus dos caras. - Modelo de la carga: Contempla la dinámica del movimiento de la carga en función de las presiones aplicadas a cada lado del émbolo y las fuerzas externas y de fricción que estén presentes en la estructura mecánica. Para la síntesis de muchas estrategias de control es necesario contar con el modelo lineal de la planta, por lo que se impone linealizar los modelos de los actuadores electro-neumáticos,.
(18) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 10. pero evitando perder los efectos de sus no linealidades. Para ello es común que se emplee el método de linealización extendida, propuesto por W. Rugh (Rugh, 1984), que permite obtener el modelo lineal para un punto de operación genérico. Aplicando este método a los actuadores electro-neumáticos, se obtienen modelos lineales con coeficientes determinados por la posición del émbolo del cilindro. Belgharbi expone un modelo analítico para el flujo a través de una válvula proporcional y propone una aproximación polinomial del mismo (Belgharbi, Thomasset, Scavarda, & Sesmat, 1999). Más tarde Brun (Brun, Belgharbi, Sesmat, Thomasset, & Scav-arda, 2000) expone el modelo no lineal de un actuador electro-neumático con el flujo de aire según el modelo de Belgharbi y lo linealiza. Obtiene como resultado un modelo lineal en espacio de estado de cuarto orden con coeficientes en función de la posición de la carga. Ese modelo de cuarto orden es reducido a uno de tercer orden, promediando las constantes de tiempo asociadas a la variación de los volúmenes en cada cámara del cilindro, y con este último sintetiza diversas estrategias de control (A. E. Rubio et al., 2008) . En su trabajo, Janiszowski presenta la linealización del modelo teniendo en cuenta el retardo introducido por las tuberías cuando son considerablemente largas (Janiszowski, 2004) .Obtiene así, para la velocidad, un modelo de segundo orden con retardo de tiempo, cuyos coeficientes dependen de la posición del émbolo en el cilindro. En este modelo, si se compara con el de Brun, puede notarse que no aparecen consideradas las constantes de tiempo asociadas a las cámaras del cilindro. Por otra parte, en el trabajo de Karpenko puede verse la linealización del modelo sin promediar ninguno de sus parámetros. Como resultado obtiene un modelo de quinto orden (teniendo en cuenta la dinámica de la válvula) con un cero. Los coeficientes de este modelo dependen de los volúmenes de las cámaras del cilindro (Karpenko & Sepehri, 2004). En su trabajo Rubio desarrolla el modelo lineal del sistema considerando que el punto de operación del cilindro puede estar en cualquier posición, por lo que se aplica la linealización extendida (Sira-Ramírez, 2005). Trabajando con las funciones que caracterizan el flujo de aire por la válvula, las presiones en las cámaras del cilindro y el movimiento de la carga, se obtiene un modelo lineal de cuarto orden, tipo uno, con un cero similar a Karpenko. El nuevo.
(19) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 11. modelo a diferencia del resto analizados, tiene en cuenta el subdimensionamiento de la válvula y la diferencia entre las constantes de tiempo asociadas a las cámaras del cilindro. Luego, el modelo es reducido a uno de tercer orden, tipo uno, sin ceros, obteniéndose un modelo similar al de Brun. El nuevo modelo describe con mayor precisión la dinámica del sistema. Las peculiaridades de la dinámica, reflejadas en el nuevo modelo, permiten establecer criterios de sintonía para el controlador propuesto que garantiza su buen desempeño a pesar de las no linealidades del sistema (A. E. Rubio et al., 2008). 1.5. Identificación experimental para pistones neumáticos.. Debido al engorroso trabajo para la determinación analítica de los parámetros para el modelado algunos autores optan por medirlos prácticamente, otros prefieren determinar el modelo por métodos de identificación experimental. Entre los autores que recurren al método de identificación experimental se encuentra Varseveld el cual identifica el sistema en lazo abierto con una señal PRBS ¨Señal Binaria Pseudo Aleatoria¨ de diferentes amplitudes y obtiene los modelos para posiciones en el centro y extremos del cilindro, verificando la variación de la razón de amortiguamiento del sistema en función de la posición. Luego en el diseño de la estrategia de control toma el modelo de la posición central (Varseveld & Bone, 1997). Debido a que la dinámica del sistema depende de la posición de la carga, y el sistema es de tipo uno, es conveniente la identificación en lazo cerrado para diferentes posiciones (A. E. Rubio et al., 2008). En esto sobresale el trabajo de Schulte, el cual identifica el sistema en lazo cerrado con una señal sinusoidal de frecuencia variable, para cinco posiciones diferentes. Los modelos obtenidos para cada posición y frecuencia se combinan en una única estructura mediante un modelo borroso (Schulte & Hahn, 2001). Dada la complejidad de los modelos, algunos autores lo tratan como sistemas multivariables. Zorlu identifica el sistema lazo abierto con una señal PRBS, en la cual mide además de la posición de la carga, las presiones en la cámara del cilindro. Separa el modelo en una parte mecánica y dos neumáticas y determina los modelos individuales, lo que resulta una estructura multivariable (Zorlu, Özsoy, & Kuzucu, 2003)..
(20) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 12. En su trabajo, Rubio, realiza la identificación experimental del modelo en función de la posición de la carga, cerrando un lazo de control con un regulador proporcional y empleando como referencia una señal PRBS centrada en diferentes posiciones que cubren todo el recorrido del cilindro (A. E. Rubio et al., 2008). 1.6. Estrategias de control convencional para robots paralelos utilizando pistones neumáticos.. Entre las estrategias que usualmente se pueden encontrar en el control de actuadores neumáticos está el PID (Proporcional-Integral-Derivativo). Las primeras investigaciones de su aplicación en actuadores neumáticos son atribuidas a Shearer en 1956, y continuadas por Vaughan, Burrows y Webb. Estos se basaban en controladores lineales con ganancias fijas, los cuales se diseñaron en base a un modelo de función de transferencia obtenida mediante linealización del sistema alrededor de condiciones específicas de operación. Estos artículos proporcionaron las bases para muchas investigaciones posteriores, y establecieron los principios fundamentales para la comprensión y control de sistemas neumáticos (Burrows, 1972). El algoritmo PID es el más popular de los controladores retroalimentados utilizados en la industria. Es de fácil implementación que puede proporcionar un excelente desempeño de control a pesar de las características dinámicas variadas de la planta en cuestión. Es importante notar que el controlador PID de ganancia fija es un método muy efectivo en casos donde el modelo lineal presenta parámetros que no varían durante la operación. Por otro lado, la simplicidad del controlador pone limitaciones sobre sus capacidades para proceder con problemas de control complejos, como los casos antes mencionados. Es difícil alcanzar el control de posición, velocidad y fuerza satisfactorio de un sistema neumático vía control PID de ganancia fija a causa de las no linealidades inherentes del actuador, tales como zonas muertas y fricciones viscosas, estáticas y dinámicas (Karpenko & Sepehri, 2004). El desempeño de estos controladores depende del conocimiento de los parámetros del sistema. La respuesta de los sistemas neumáticos con algoritmos PID suele ser rápida por lo que resultan ser oscilatorias amortiguadas. Con el objetivo de resolver dicho problema se plantea el uso de un prefiltro a la entrada del sistema, con ello se garantiza una referencia.
(21) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 13. suave. De esta forma, son evitadas oscilaciones en la salida y excesiva amplitud en la señal de mando que pudiera dañar la estructura mecánica del robot. El complejo proceso de posicionamiento neumático tiene comportamientos no lineales y variantes en el tiempo, en consecuencia es difícil deducir e identificar un modelo dinámico apropiado para los controladores tradicionales. Varias investigaciones han sido dedicadas a modificar los algoritmos PID y que puedan ser utilizados en actuadores neumáticos en lazo cerrado (Kikuuwe & Fujimoto, 2006; Van Damme et al., 2009). Generalmente las estrategias basadas en PID, se han utilizado como referencia para comparar con otras estrategias de control. 1.7. Control basado en lógica borrosa y PID Borroso.. En 1965 el Profesor Lotfi Zadeh introdujo la lógica borrosa proponiendo una vía matemática de mirar la vaguedad intrínseca del lenguaje humano, y desde ese momento varias aplicaciones exitosas, principalmente en control, han aparecido en la literatura (Reznik, 1997). Zadeh introdujo el concepto de variables lingüísticas. Los valores de estas variables son expresiones que describen una condición, como Alto, Pequeño, Grande, Cero, Pobre, Rico, Muy Largo. Estos no son entidades independientes sino un conjunto de elementos que asumen diferentes grados de pertenencia en el conjunto, el cual es denominado conjunto borroso. En conjuntos convencionales un elemento pertenece al conjunto o no; en conjuntos borrosos, un elemento puede pertenecer completamente, parcialmente o no pertenecer al conjunto. Las técnicas borrosas han sido. aplicadas al mundo. industrializado. (procesos. y. automatización) brindando un buen desempeño. Los resultados de este uso han demostrado que los sistemas borrosos presentan ventajas en comparación con algoritmos PID. Las ventajas principales de los borrosos son las siguientes (Sorli, Gastaldi, Codina, & De las Heras, 1999): -. No es necesario construir un modelo matemático detallado.. -. Pueden funcionar con un gran número de entradas.. -. Pueden ser empleados en sistemas no lineales..
(22) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. -. 14. El conocimiento humano se puede aplicar de manera directa.. La esencia del control borroso, es que las reglas lingüísticas apropiadas están elegidas, basados en usar un cierto procedimiento de toma de decisión, de una tabla de reglas construida basado en la experiencia y bases de datos del control humano. Las reglas borrosas son establecidas por ensayo y error con el concepto de simetría. Estas características hacen de la lógica borrosa una herramienta útil para enfrentar complejos problemas de control, donde las estrategias convencionales no trabajan muy bien, o simplemente fallan. El control borroso es robusto para los sistemas con variación en su dinámica, o en un modelo libre en sistemas en los cuales la información precisa no es requerida. Estos han tenido un completo uso en procesos complejos indefinidos con un mejor desempeño. que un. controlador PID. Otra importante ventaja de los controladores borroso es que tienen un tiempo de respuesta corto y un sobre impulso alto. Sin embargo hay todavía dificultades en el diseño de los controladores borrosos. Uno de los problemas importantes es la complejidad de los controladores borrosos, la cual incrementa exponencialmente, cuando aumenta el número de variables a la entrada. El controlador hibrido PID-Borroso alcanza su ventaja por la característica no lineal del borroso y la casi exactitud de la referencia garantizada por el PID normal. 1.8. Técnicas borrosas aplicadas a actuadores neumáticos.. La aplicación de control borroso a un sistema de posicionamiento neumático continuo fue desarrollada por Ferraresi en 1988, resultando particularmente ventajosa en términos de simplicidad de diseño e implementación (Moreno, 2000). En su trabajo M. Parnichkun y C. Ngaecharoenkul proponen un controlador híbrido PIDborroso para la solución de un sistema neumático. El algoritmo de control es separado en dos partes, el controlador borroso y el controlador PID. La posición y velocidad del pistón neumático son controladas de tal manera que el pistón es capaz de moverse con la velocidad específica en la posición indicada. El controlador borroso es usado en el control del pistón cuando está localizado fuera de la posición deseada y el controlador PID es aplicado cuando el pistón está cerca de la posición deseada. En el experimento para comprobar el desempeño del sistema, el tiempo de establecimiento y el error en estado estable son investigados, para.
(23) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 15. los cinco algoritmos de control P, PI, PD, PID y PID-fuzzy. Como resultado se obtiene que el controlador PID-Borroso obtiene el mejor desempeño en cuanto a tiempo de establecimiento y error en estado estable (Parnichkun & Ngaecharoenkul, 2000). En su trabajo Chillari presenta la comparación de varios controladores: un PID, uno borroso, un PID con realimentación de presión, uno borroso con realimentación de presión, uno por Modo Deslizante y uno borroso con realimentación de presión, a partir de estimarla por una red neuronal. Los controladores que realimentan presión tienen un mejor desempeño, y como que medir la presión en cada cámara del cilindro encarece considerablemente el sistema, concluye que la variante borrosa con estimador neuronal resulta la más conveniente (Chillari, Guccione, & Muscato, 2001). En su trabajo Llerena lleva a cabo un control por modo deslizante basado en lógica difusa aplicado en el espacio articular a un robot paralelo de dos grados de libertad (GDL) (ladeo y cabeceo). Dicho algoritmo, aplicado sobre los pistones electro-neumáticos, se basa en el autoajuste de la pendiente de superficie deslizante acorde a la dinámica del sistema neumático. Los resultados experimentales muestran no solo la convergencia del sistema sino la atenuación del chattering con respecto al posicionamiento de los actuadores neumáticos (García Llerena et al., 2014). 1.9. Consideraciones parciales. Las aplicaciones de los robots paralelos. son diversas debido. a sus. ventajas,. fundamentalmente por su precisión. Sin embargo, cuando se emplean en ellos actuadores neumáticos, aparecen características que dificultan considerablemente el control de su posición. Entre ellas se encuentran la dinámica altamente no lineal, las fugas en las válvulas, entre otras. Las técnicas de identificación experimental demostraron ser un método eficaz para la obtención de modelos que respondan eficientemente a la dinámica de los sistemas electroneumático..
(24) CAPÍTULO 1. ROBÓTICA PARALELA Y ALGORITMOS DE CONTROL. 16. Las técnicas de control borroso constituyen una estrategia de control adecuada para sistemas de una sola entrada y una sola salida, y demuestran buen comportamiento en aplicaciones de control a sistemas electro-neumático. A continuación se tratarán de utilizar la combinación de las técnicas PID por su robustez y las borrosas por su manejo de las nolinealidades en el control de una plataforma de dos grados de libertad..
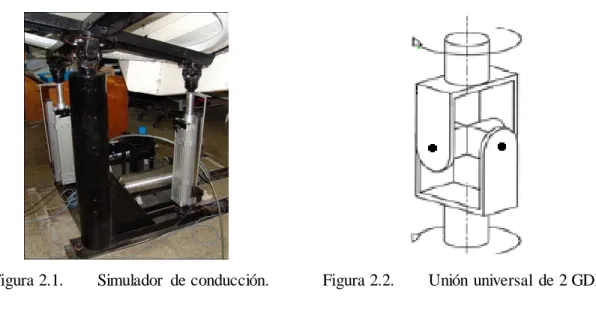
(25) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 17. CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. En este capítulo se detallan las características técnicas de la plataforma de pruebas, se muestra el modelo analítico de los actuadores electro-neumáticos y se identifica experimentalmente el modelo lineal para experimentos posteriores. Son descritos los sistemas de inferencia borrosos, el sistema tipo Mamdani y el sistema tipo Takagi-Sugeno-Kang y se escoge el primero para este trabajo. Son mostradas la estructura y diseño de un controlador borroso, así como el diseño del PID como controlador borroso y los pasos a seguir para el diseño de este. 2.1. Características técnicas de la plataforma de pruebas.. El simulador de conducción de sello SIMPRO producido por CIDSIM es ampliamente utilizado en el entrenamiento de personal. Está compuesto por una cabina de conducción con los mandos reales que simulan el comportamiento al cual se enfrenta el chofer del vehículo y un monitor que le brinda la simulación virtual del entorno con el que interacciona. Puede simularse un vehículo ligero o pesado. El mismo presenta una estructura mecánica formada por una estructura paralela, con cinco uniones universales y dos articulaciones constituidas por pistones neumáticos. La cabina presenta una estructura mecánica formada por una estructura paralela, con cinco uniones universales y dos articulaciones constituidas por pistones neumáticos. En la figura 2.1 se representa la estructura mecánica del robot. Las uniones universales son equivalentes a dos articulaciones en revolución cruzadas (figura 2.2). La cabina pivotea sobre una columna central mediante una articulación pasiva en cuyo extremo superior se encuentra una unión universal. Los movimientos de la plataforma móvil se logran mediante la acción de los dos cilindros neumáticos que constituyen articulaciones.
(26) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 18. actuadas cuyos desplazamientos lineales le imprimen al efector lineal rotaciones sobre dos ejes perpendiculares entre sí. Estas rotaciones simulan las pendientes del mundo virtual las cuales son visualizadas en el monitor ubicado en la propia cabina (Velazco, 2007).. Figura 2.1.. Simulador de conducción.. Figura 2.2.. Unión universal de 2 GDL.. La plataforma de SIMPRO es un robot paralelo de dos grados de libertad, donde la acción de cada uno de los actuadores tiene efecto sobre una sola articulación lo que permite que esta se comporte de forma desacoplada. En ambos extremos de las articulaciones se encuentran uniones universales que le permiten los grados de movilidad necesarios para lograr las orientaciones de la plataforma móvil superior como se muestra en la figura 2.3.. Figura 2.3.. Arquitectura de la plataforma. Según el fabricante del simulador, la condición crítica de movimiento a experimentar por el vehículo simulado se considera como la caída libre de un extremo pivoteando en el otro. En estas condiciones, la plataforma debe ser capaz de alcanzar aceleraciones angulares de hasta.
(27) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 19. 2𝑟𝑎𝑑/𝑠𝑒𝑔2 que para los cilindros representa aceleraciones lineales de hasta 1000 𝑚𝑚/𝑠𝑒𝑔2 (A. E. Rubio et al., 2008). Los datos más importantes de la plataforma del simulador se ofrecen en la siguiente Tabla 2.1 (Moreno, 2000). El origen de coordenadas para las medidas de longitud y ubicación del centro de masa (CM) se establece en el pivote central. En ambos extremos de las articulaciones se encuentran uniones universales que le permiten los grados de movilidad necesarios para lograr las orientaciones de la plataforma móvil superior. Cada articulación electro-neumática está formada por un cilindro FESTO DNC-100-400, gobernado por una válvula proporcional de flujo FESTO MPYE-5-3/8 (A. E. Rubio et al., 2008). Tabla 2.1 Características del simulador. Parámetro. Valor. Posición del CM en Z. 480 mm. Posición del CM en X. 100 mm. Posición del CM en Y. 60 mm. Distancia del origen cada cilindro. 500 mm. Elongación de los cilindros. ±150 mm. Ángulo de ladeo y cabeceo. ±0.26 rad. 2.2. Modelo Analítico de los actuadores electro-neumáticos.. Llegar al modelo analítico de un actuador electro-neumático es importante para la descripción del funcionamiento físico del proceso. En este caso se tiene en cuenta en el modelo el subdimensionamiento real que presentan las válvulas neumáticas debido a que el aire no es un buen lubricante. A partir de este subdimensionamiento se considera las fugas de aire hacia las cámaras del cilindro a la hora de obtener el modelo matemático del actuador. El modelo no lineal del sistema se obtiene a partir del modelo de la válvula, la dinámica de las presiones y el modelo de la masa móvil, donde se tiene en cuenta el dimensionamiento característico presente en el carrete de las válvulas proporcionales neumáticas. El fluido.
(28) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 20. gaseoso a través de ellas es mal lubricante y siempre va a existir un flujo constante en su punto de equilibrio que provoca una no linealidad en el sistema (Burrows, 1972). El modelo de un actuador requiere analizarse en tres sub-sistemas: Modelo de la válvula: Contempla la dinámica del flujo de aire a través de la válvula en función de la acción de control y las presiones en sus extremos. Modelo del actuador: Contempla la dinámica de las presiones en las cámaras del cilindro en función del flujo de aire y los volúmenes de las cámaras del cilindro, así como sus variaciones. Estos dos últimos parámetros quedan definidos por la posición y velocidad del émbolo (y, por tanto, de la carga) si se conoce el área de sus dos caras. Modelo de la carga: Contempla la dinámica del movimiento de la carga en función de las presiones aplicadas a cada lado del émbolo y las fuerzas externas y de fricción que estén presentes en la estructura mecánica. Las válvulas FESTO MPYE-5-3/8-010-B, presentan un ancho de banda aproximadamente de 100 Hz, por lo que su dinámica frente a la dinámica de la carga es despreciable (E. Rubio, 2007); como resultado, el modelo de la válvula sólo incluye la característica estática del flujo de aire. Mediante experimentos, (Prieto, 2013) demuestra de la presencia de una no linealidad del tipo backslash, característica propia de las válvulas neumáticas (Karpenko & Sepehri, 2004). También se realiza el análisis de la dinámica de las presiones de las cámaras del cilindro electro-neumático de doble efecto y el balance de fuerzas del cilindro dando como resultado que la dinámica de un sistema neumático puede ser resumido en: 𝑅𝑇 𝑃 𝐴 𝑦̇ (𝑄𝑚1 − 1 1 ) 𝑉1 (𝑦) 𝑅𝑇 𝑅𝑇 𝑃 𝐴 𝑦̇ ( 𝑄𝑚1 − 1 1 ) 𝑃1̇ = 𝑉1 (𝑦) 𝑅𝑇 ( 𝑦̈ = 𝑃1 𝐴1 − 𝑃2 𝐴 2 − 𝑃𝑎 𝐴 𝑣 − 𝐹𝑓 )⁄𝑀 𝜕𝑣 = 𝑦̈ 𝜕𝑡 𝑉1 = 𝐴 1𝑦 { 𝑉2 = 𝐴 2(𝑦𝑚𝑥 − 𝑦) = 𝐴 2𝑦𝑚𝑥 − 𝐴 2𝑦 𝑃̇1 =. donde: 𝑦𝑚𝑥 es la posición máxima del cilindro y y es posición del cilindro.. (2.1).
(29) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 21. R: Constante ideal de los gases (R = 287,2 J/kgK) m: Masa del aire (kg) P1 , P2 : Presión de las cámaras superior e inferior (Pa) A1 , A2 : Área de las cámaras inferior y superior (m2 ) y : Posición del pistón (m) V1 (y), V2 (y): Volumen de la cámara inferior y superior del pistón (m3 ) M: Carga (kg) Av: Área de la sección transversal del vástago (m2 ) v: Velocidad del pistón(m/s) Ff : Fuerza de fricción (N). Qm1 y Qm2 : flujos másicos hacia el cilindro La fricción entre el émbolo y el cilindro es uno de los fenómenos que más incide en la no linealidad de los actuadores electro-neumáticos, es una fuerza que se opone al movimiento y provoca el deterioro del desempeño de los sistemas de control. A ella están asociados efectos tales como error en estado estable, movimientos a saltos (Stick-Slip) y oscilaciones (por la combinación del stick-slip con acciones de control integral) (E. Rubio, 2007). 2.3. Identificación experimental.. El modelo dinámico del sistema electro-neumático de los robots paralelos, que incluye válvula y pistón, se sustenta en que estos constituyen los elementos actuadores de estas estructuras robóticas, además del soporte de la plataforma móvil, el comportamiento de estos elementos determinan en gran medida el desempeño dinámico del robot (Frank Wobbe, Michael Kolbus, & Walter Schumacher, 2008). Para el robot SIMPRO de dos grados de libertad, la posición que toman los actuadores lineales tienen gran incidencia en el posicionamiento continuo de la plataforma móvil, por lo que el modelo dinámico de los mismos será empleado para la síntesis de los controladores que mejoren el desempeño del mecanismo robótico..
(30) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 22. Debido a que la dinámica de los actuadores electro-neumáticos es altamente no lineal, estas no linealidades influyen en el sistema en forma de perturbaciones y por tanto, se dificulta el control de los mismos (Hahn, 2005; Krivts & Krejnin, 2006). En un estudio realizado por Rubio, este presenta un método para el modelado de actuadores electro-neumáticos basado en identificación experimental aplicado a la plataforma neumática de dos grados de libertad (A. E. Rubio et al., 2008). Esta experiencia se aprovechó en este trabajo a la hora de obtener el modelo a utilizar necesario para implementar el control borroso basado en el modelo. El modelo analítico del actuador lineal electro-neumático, considera el subdimensionamiento de la válvula y las constantes de tiempo del cilindro, de modo que describe con mayor exactitud la dinámica real del sistema, definiéndose el modelo por la expresión: 𝐴 1𝐺1/𝐶1 𝐴 2𝐺2/𝐶2 + 𝑌(𝑠) 𝜏1𝑠 + 1 𝜏2𝑠 + 1 = U(s) s (Ms + 𝐹𝑣 + 𝐴 1𝐾1𝑦/𝐶1 + 𝐴 2𝐾2𝑦/𝐶2) 𝜏1𝑠 + 1 𝜏2𝑠 + 1. (2.2). donde las constantes de tiempo se calculan como: 𝜏1 =. 𝐾1𝑝 𝐾2𝑝 ; 𝜏2 = 𝐶1 𝐶2. 𝑷𝟏; 𝑷𝟐: Presiones aplicadas en las cámaras de los cilindros (Pa) 𝑨𝟏; 𝑨𝟐: Área del pistón en cada cámara (𝑚2 ) M: Masa (kg) Fv: Fricción viscosa (Ns/m) Y: Posición del vástago (m) Las constantes 𝐺1, 𝐺2 en (kg/s 𝑚2 ) y 𝐶1, 𝐶2 en (kg/sPa) se obtienen de las derivadas parciales de las ecuaciones que consideran el flujo másico de aire a través de la válvula proporcional de flujo: qm = f(x; Pent; Psal). Por su parte, las constantes 𝐾1𝑝, 𝐾2𝑝 en (kg/Pa) y 𝐾1𝑦, 𝐾2𝑦 en (kg/m), son obtenidas mediante diferenciación de la ecuación de estado de los gases ideales respecto a la presión y el volumen de aire, dependientes de la posición del pistón (A. E. Rubio et al., 2008)..
(31) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 23. Teniendo en cuenta lo antes expuesto, se identifica dinámicamente el sistema válvula-pistón de una extremidad activa del robot de 2GDL, para lo cual se emplea el esquema de identificación de lazo cerrado que se muestra en la figura 2.7 debido a que el sistema es inestable en lazo abierto, controlándose el lazo cerrado a un período de muestreo de un milisegundo (ms). La identificación se realiza alrededor del valor de posición central de un cilindro que es donde se demuestra que el modelo que se obtiene es el que tiene los polos complejos conjugados más próximos al origen del plano del lugar de las raíces, por lo que, sin dudas, es la dinámica más exigente (Varseveld & Bone, 1997).. Figura 2.4.. Diagrama de identificación de lazo cerrado para el sistema electro-neumático. La frecuencia y amplitud de la señal binaria pseudoaleatoria (PRBS) de entrada, así como el valor de ganancia proporcional Kp, se escogen para garantizar que el sistema responda persistentemente excitado. La función transferencial del subsistema válvula-pistón que relaciona la posición del actuador Y(s) con el voltaje de entrada aplicado a la servoválvula U(s), adquiere la forma de la ecuación de tercer orden tipo 1, (2.25), donde ωn y f representan la. frecuencia. natural no. amortiguada. y. razón. de. amortiguamiento. del. sistema. respectivamente, mientras que Ke indica la ganancia. 𝑌(𝑠) 𝐾𝑒 = = 𝐺𝐷 𝑆 2 U(s) s (𝑠 + 2φω𝑛s + ω𝑛2 ). (2.3). El modelo resultante para la articulación neumática es: 𝑌(𝑠) 105700 = 2 U(s) s (𝑠 + 7.579s + 1036). (2.4).
(32) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 24. El modelo obtenido con un FIT de 88.57% (porciento de ajuste definido en el Toolbox de identificación del Matlab) se emplea para el diseño del controlador borroso para el posicionamiento del pistón electro-neumático.. 2.4. Sistemas de inferencia borrosos.. El sistema de inferencia es considerado como el corazón de cualquier controlador borroso en cuestión. La inferencia borrosa no es más que el proceso de formular la asignación de una entrada a una salida usando la lógica borrosa. Este proceso involucra a todas las piezas, conceptos a los que se hicieron alusión anteriormente: funciones de membresía, reglas (SIENTONCES) y operadores lógicos. Se distinguen dos clases de sistemas basados en reglas borrosas, de acuerdo con la forma de las reglas y del tipo de entradas y salidas (Roffel & Betlem, 2006), estos son el sistema tipo Mamdani y el sistema tipo Takagi-Sugeno-Kang. 2.4.1 Sistemas tipo Mamdani. Este tipo de sistema fue propuesto por Ebrain Mamdani (Cong, Hoang, Khanh, Truog, & K., 2003), quien fue capaz de traducir las teorías borrosas propuestas por Zadeh en el primer sistema borroso aplicado en el área del control, convirtiéndose en uno de los más usados y aplicados en la fabricación de controladores a nivel mundial (Reznik, 1997). Está compuesto por un motor de inferencia, una base de conocimiento, una interfaz de borrosificación y otra de desborrosificación. Borrosificación: Se realiza un escalado de los valores de entradas para adecuarlos a valores típicos entre cero y uno. Base de conocimiento: formada por una base de datos que reúne la definición de las funciones de pertenencia de las entradas y el sistema, una base de reglas que resume la política, objetivos del control de un experto a través de un conjunto de reglas lingüísticas de control. Motor de inferencia: Es donde se infiere las acciones del sistema empleando alguna representación de la implicación borrosa, así como de los procedimientos de inferencia de esta lógica..
(33) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 25. Desborrosificación : Se realiza un nuevo escalado para adecuar los rangos de salida para los que se ha definido el sistema en relación con las entradas. Usualmente se utiliza el método del centro de gravedad, pues proporciona variaciones suaves y continuas en los valores de salidas. Las reglas que manejan esta clase de sistema son de la forma: Si X1 es A1 y Xn es An entonces Y es B donde las entradas Xi y salidas Y son números no borrosos, en lugar de términos lingüísticos, mientras que A y B son conjuntos borrosos (Wu & Mendel, 2003). 2.4.2 Sistemas tipo Takagi-Sugeno-Kang. En lugar de trabajar con reglas lingüísticas como el anterior, se propone un modelo en el que el antecedente se compone de variables lingüísticas y la consecuencia se representa como una función de las variables de entradas de la forma: Si X1 es A1 y Xn es An entonces Y=P1*X1 + Pn*Xn +P0 donde las Pi son parámetros reales, siendo este tipo de regla conocida como TSK en honor a sus creadores (Takagi, 1958). En este sistema no es necesaria la desborrosificación, ya que cada regla tiene una salida exacta, se procede a través de: – Promedio ponderada de cada regla. – Suma ponderada de cada regla (z' = w1z1 + w2z2) 𝑓(𝑥) =. ∑𝑚 𝑖=1 hi∗Yi ∑𝑚 𝑖=1 hi. (2.6). Siendo hi el grado de emparejamiento entre la parte del antecedente de la regla i y las entradas actuales al sistema (Dadone, 2001)..
(34) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. Figura 2.5.. . Partes del sistema de inferencia TSK.. 26.
(35) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 27. Tabla 2.2 Comparación entre los sistemas de inferencia Mamdani y Sugeno. Mamdani. Sugeno. El antecedente de la regla es el mismo.. El antecedente de la regla es el mismo. La parte de la consecuencia está formada La parte de la consecuencia está formada por conjuntos borrosos.. por funciones matemáticas.. Fácil de entender por un experto humano y Más de implementar las reglas.. efectivo. computacionalmente,. más. conveniente en análisis matemático y de sistemas.. Propuesto con anterioridad y uso frecuente.. Garantiza la continuidad de la superficie. Debido a la facilidad que proporciona para representar el conocimiento y la experiencia acumulada por los expertos, la cantidad de aplicaciones exitosas encontradas en la revisión bibliográfica y específicamente a los PID-Borrosos que son de interés para este trabajo, se selecciona el sistema de inferencia Mamdani para implementar los controladores. 2.5. Controlador PID-Borroso.. La lógica borrosa ha llegado a ser rápidamente una de las tecnologías más exitosas en la actualidad para desarrollar sistemas de control (Boufera, Debbat, Mondada, & Khelfi, 2014). Con su ayuda, los requerimientos más complejos pueden ser implementados en un control simple, barato y de fácil mantenimiento Lofti Zadeh propuso que muchos conjuntos en el mundo que nos rodea no están definidos por límites iguales. Zadeh decidió extender los dos valores lógicos definidos por el par binario (0,1), a todo un intervalo continuo [0,1] y en consecuencia se introdujo un cambio gradual de lo falso a lo verdadero (Ilian Bonev, 2003). El control difuso tiene como objetivo realizar el análisis y diseño de sistemas de control basados en sistemas de inferencia difusos, los cuales permiten transformar el conocimiento sobre el control de una planta, expresado en forma de regla SI- ENTONCES, en una relación matemática para el cálculo de acciones de control a partir de mediciones de la planta. Una.
(36) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 28. regla difusa puede reemplazar varias reglas convencionales. Y puesto que la lógica difusa crea un sistema de control al combinar reglas y conjuntos difusos, esto permite a los diseñadores construir controladores aun cuando no tengan un entendimiento total del sistema (Kolbus, 2008). Si a un sistema de inferencia le añadimos un borrosificador y un desborrosificador se forma un sistema difuso capaz de procesar entradas y salida numéricas reales. 2.5.1 Estructura y diseño de un controlador borroso. El tipo de estructura de un controlador borroso dependerá del proceso a controlar y de las demandas cualitativas de control (Figura 2.6). El área de aplicación para estos controladores es muy amplia, hay un sinnúmero posible de maneras de estructurarlos, muchas difieren entre sí por el número de entradas, salidas de los conjuntos borrosos y sus funciones de pertenencias, por el tipo de motor de inferencia y desborrosificación. Toda esta variedad está a disposición del diseñador y de este dependerá decidir cuál será la óptima para un problema dado. La forma básica común de todos los tipos de controladores se puede resumir en: borrosificación de las entradas, base de reglas borrosas, motor de inferencia y desborrosificación (Kovacic & Bogdan, 2006). Ba s ado en el Model o. Model o Libre. Prueba Heurística y error. Figura 2.6.. PID Borros o. uti l izando métodos a da ptativos. uti l izando síntesis di recta. Control Borroso Ada ptativo Indirecto. Pl a nificacion de Ga nancias Borrosas. Control Borroso Ada ptativo Directo. Control Deslizante modo Borroso. Aprendizaje Invers o. Li nealizacion por rea limentación. Clasificación de las estrategias de control borroso.. util izando opti mización en l i nea. Control Predictivo ba sado en Modelo Borros o.
(37) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 29. A pesar de las diferentes maneras de construir estos tipos de reguladores, se pueden clasificar en controladores diseñados basados en modelos y modelo libre. Los controladores basados en modelos usualmente demandan una descripción completa de la dinámica de la planta, mientras que la estrategia de modelo libre no está basada sobre un completo modelo matemático, sino que ella se nutre de información extraída de simples experimentos o en modelos heurísticos presentes en la mente del diseñador (Espinosa, Vandewalle, & Wertz, 2005). Dentro de las estrategias de control borroso que se muestran en la figura 2.6, se selecciona para este trabajo la del modelo libre por las características expuestas. 2.5.2 Diseño del PID como controlador borroso. El PID como controlador borroso cuyas siglas significan proporcional, integral y derivativo, ha sido incluido dentro de esta clase de modelo libre porque un controlador borroso puede ser diseñado mediante el empleo de los mismos experimentos usados para sintonizar los reguladores clásicos. La principal idea que hay detrás de esto, es que cualquier regulador con entradas y salidas limitadas puede ser perfectamente reproducido por un sistema borroso (Espinosa et al., 2005). El método de diseño se puede resumir de la siguiente manera: -. Sintonizar un PID a través de uno de los métodos tradicionales (Ziegler Nichols etc.).. -. Construir un controlador borroso equivalente al PID anterior.. -. Realizar sintonías adicionales mediante el empleo de la heurística al controlador borroso.. Tal vez la forma más popular de representación de estos controladores a bajo nivel son los llamados e,Δe. Estos son reguladores con dos entradas, el error y el cambio del error, y una salida la cual es la acción de control u o Δu lo que depende si se está comportando como un PD (proporcional-derivativo) o un PI (proporcional-integral). Una característica interesante de esta descripción está en el hecho de que una analogía directa se puede establecer con los reguladores clásicos PD y PI. El regulador borroso con acción directa será análogo a un regulador PD, y el regulador borroso con acción incremental será análogo a un regulador PI (Espinosa et al., 2005). Con el objetivo de brindar más generalidad en el proceso del diseño del regulador, se aconseja la normalización de los dominios de entrada y de salida del mismo. El universo de las.
(38) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 30. entradas y de las salidas del regulador borroso varía desde una aplicación a otra y para evitar tener que hacer ajustes a cada una, las entradas y salidas pueden ser escaladas para así hacerlas corresponder con el respectivo universo de entrada del controlador. Cuando se utiliza el término de regulador borroso normalizado, se tiene en mente un regulador cuya borrosificación, base de reglas borrosas y partes de la desborrosificación funcionan con los valores normalizados, que radican generalmente en el intervalo [-1, 1] (Kovacic & Bogdan, 2006). La normalización de entradas debe ser realizada antes de proceder con la borrosificación: 𝑋N(K) = 𝐾x ∗ 𝑋(k). (2.7). Donde X es la entrada discreta del controlador, X N es la entrada al controlador normalizada y Kx es el factor de escala. En el caso del error y en el cambio en la salida del proceso la normalización se convierte en: 𝑒N(K) = 𝐾e ∗ 𝑒(K). (2.8). 𝛥Yn(K) = 𝐾Δy ∗ 𝛥Yf(K). (2.9). Donde Ke y K∆Y son los factores de escala. El escalamiento de entradas debe ser hecho cuidadosamente de modo que se pueda utilizar la base borrosa completa de la reglas. Debido al escalamiento inadecuado, la tabla borrosa de las reglas, sobre la cual se hará alusión posteriormente, puede ser mal particionada, esto puede traer como consecuencia que muchas de las reglas queden inactivas aunque la base de las mismas sea completa. Vale mencionar que los factores de escala, incluyendo el factor de escala de salida del regulador Ku, tienen un impacto muy fuerte en el comportamiento dinámico del sistema de control porque influencian directamente en el valor del coeficiente de ganancia a lazo abierto. Existen muchos reguladores borrosos analógicos en el mercado, la mayor parte de estos, hoy, se implementan en forma digital, o sea el universo de entrada y salida de los mismos se pueden encontrar discretizados (Kovacic & Bogdan, 2006). En la.
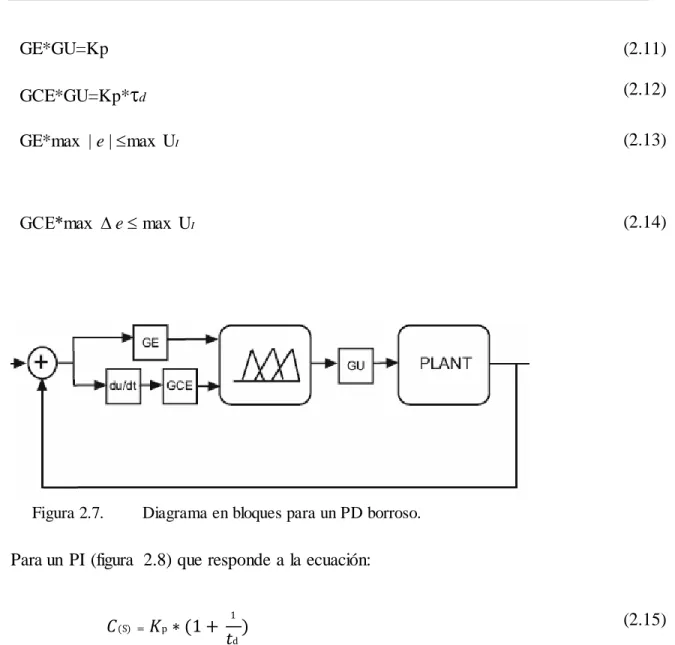
(39) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 31. tabla 2.2 se muestran las formas comunes de utilizar las entradas y salidas para controladores borrosos. El uso de las “constantes de ganancia” llamadas factores de escala se puede evitar mediante una inicialización más compleja del sistema borroso donde las entradas no se escalan y cada valor de la salida se calcula a través del establecimiento de su relación directa con los valores de las funciones de pertenencia en el antecedente y consecuencia de las reglas en procesamiento (L. Reznik, 1997.). Tabla 2.2 Equivalentes continuos y discretos de las variables de un controlador. Variable lingüística Error del sistema, error de control. Derivada del error de control; diferencial del error de control. Integral del error de control;. Contínuo. Discreto. e(t). e(k). 𝑑𝑒(𝑡) 𝑑𝑡. Δ e(k). ʃ𝑒(𝑡)𝑑𝑡. ∑ e(k). 𝑑𝑌𝑓(𝑡) 𝑑𝑡. Δ𝑌𝑓(𝑘). Sumatoria del error de control. Derivada de la salida del sistema; Diferencial de la salida del sistema.. 2.5.3 Estructuras de los controladores PID-borrosos Existe un método seguro para el reemplazo de un controlador borroso como un PD o PI clásico a través de las ganancias de estos últimos una vez ajustados, para luego lograr un buen desempeño con la sintonización de las funciones de pertenencias (Espinosa et al., 2005). Sea GE factor de escala de entrada para el error, GCE factor de escala de entrada para la derivada del error, GCU factor de escala en la salida para la integral del error, GU factor de salida y UI universo de entrada al controlador como se ilustra en las figuras 2.7 y 2.8. Se necesita para un PD (figura 2.7) que responde a esta ecuación: 𝐶 (S) = 𝐾p ∗ (1 + 𝑡d S ) que los factores de escala cumplan con los siguientes requisitos:. (2.10).
(40) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. 32. GE*GU=Kp. (2.11). GCE*GU=Kp*d. (2.12). GE*max | e | max UI. (2.13). GCE*max ∆ e max UI. (2.14). Figura 2.7.. Diagrama en bloques para un PD borroso.. Para un PI (figura 2.8) que responde a la ecuación:. 𝐶(S). =. 𝐾p ∗ (1 +. 1. 𝑡d. ). (2.15). Que los factores de escala cumplan con los siguientes requisitos: GCE*GCU=Kp. GE*GCU=. 𝐾𝑝 𝑡d. (2.16) (2.17). GE*max | e | =max UI. (2.18). GCE*max ∆ emax UI. (2.19).
(41) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. Figura 2.8.. 33. Diagrama del regulador borroso PI.. Se debe observar que las primeras dos condiciones en cada uno garantizan el correcto mapeo de las ganancias del controlador mientras que las dos restantes proporcionarán la no saturación del controlador (Espinosa et al., 2005) . Se puede mover la integración desde la parte que le precede al regulador a la posterior del mismo como se muestra en la figura 2.9. Se integrará de esta manera la salida y entonces se tiene a la entrada, el error y el cambio de este, comportándose todavía como un PI (Reznik, 1997) . Esto se realiza para evitar el exceso de reglas que muchas veces ofrece el amplio universo de entrada de la acción integral. La demostración analítica de lo anterior es la siguiente:. C(t)=Kp*e(t)+ Ki*∫ e(t)dt diferenciando la misma se obtiene: 𝑑(𝐶(t)) 𝑑𝑒(𝑡) + 𝐾𝑖 ∗𝑒(𝑡) = 𝐾p ∗ 𝑑𝑡 𝑑𝑡. (2.20). y en su forma discreta: 𝛥C(t) = 𝐾𝑝 ∗ Δe(t) + 𝐾𝑖 ∗ 𝑒 (t). (2.21). donde C(t) es la salida del controlador, e(t) es el error, Kp es la ganancia proporcional y Ki es la ganancia integral..
(42) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. Figura 2.9.. 34. Diagrama en bloques de un controlador borroso PI con el efecto integral a la. salida.. Es complejo implementar un PID-Borroso con tres términos a la entrada, error, integral y derivada del error. Una base de reglas con tres entradas se hace bastante compleja y las reglas alrededor de la acción integral se hacen más molestas. Por consiguiente es común separar la acción integral. Una estructura de un controlador híbrido PD-Borroso+I puede lograrse poniendo un controlador PD-Borroso en paralelo con el controlador convencional integral (Jantzen, 1998). El modelo de simulink de un controlador híbrido PD-Borroso+I de Jantzen con la planta es mostrado en la figura 2.10. En esta arquitectura solo dos funciones de membresías borrosas son usadas para las dos entradas, el error e y la derivada del error é. La base de reglas para un controlador PD-Borroso consiste solo en cuatro reglas. El diseño y sintonía del controlador PD-Borroso+I está basado en los pasos propuestos en (Lochan & Roy, 2015) Estas cuatro reglas son suficientes para cubrir todas las posibles situaciones (Lochan & Roy, 2015). Los parámetros del controlador PID y las ganancias borrosas en el PD-Borroso+ I son calculadas como sigue.. GE × GU = K p , GCE/GE = Td, GIE/GE = 1/Ti. (2.22).
(43) CAPÍTULO 2. IDENTIFICACIÓN Y CONTROL DE UN ROBOT PARALELO DE DOS GRADOS DE LIBERTAD.. Figura 2.10.. 35. Controlador híbrido PD-Borroso+I.. 2.5.4 Procedimiento de diseño de un controlador PID borroso A modo de resumen, la figura 2.11 muestra el procedimiento a seguir para obtener un PIDfuzzy.. Figura 2.11.. Procedimiento para la sintonía del regulador PID-Borroso..
Figure



+7





Outline
Documento similar