Implementación de un robot móvil controlado de forma remota, aplicado al monitoreo del edificio de la FIE en tiempo real utilizando realidad aumentada
130
0
0
Texto completo
(2) © Jefferson Ramiro Frías Moyón Se autoriza la reproducción total o parcial con fines académicos, por cualquier medio o procedimiento incluyendo la cita bibliográfica del documento, siempre y cuando se reconozca el Derecho de Autor.. ii.
(3) ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO FACULTAD DE INFORMÁTICA Y ELECTRÓNICA ESCUELA DE INGENIERÍA ELECTRÓNICA EN CONTROL Y REDES INDUSTRIALES. El Tribunal del Trabajo de titulación certifica que El trabajo de investigación: “IMPLEMENTACIÓN DE UN ROBOT MOVIL CONTROLADO DE FORMA REMOTA, APLICADO AL MONITOREO DEL EDIFICIO DE LA FIE EN TIEMPO REAL UTILIZANDO REALIDAD AUMENTADA”, de responsabilidad del señor Jefferson Ramiro Frías Moyón, ha sido minuciosamente revisado por los Miembros del Tribunal del Trabajo de titulación, quedando autorizada su presentación.. NOMBRE. FIRMA. FECHA. Dr. Julio Santillán Castillo ……………………... ……………………. VICEDECANO DE LA FACULTAD DE INFORMÁTICA Y ELECTRÓNICA.. Ing. Freddy Chávez. V DIRECTOR DE LA ESCUELA DE. ……………………... ……………………. INGENIERÍA ELECTRÓNICA EN CONTROL Y REDES INDUSTRIALES.. Ing. Edwin Altamirano. S DIRECTOR DE TRABAJO DE TITULACIÓN …………………….. ……………………. Ing. Freddy Chávez V. ……………………... ……………………. MIEMBRO DEL TRIBUNAL.. iii.
(4) Yo, Jefferson Ramiro Frías Moyón soy responsable de las ideas, doctrinas y resultados expuestos en este Trabajo de titulación y el patrimonio intelectual de Trabajo de titulación pertenece a la Escuela Superior Politécnica de Chimborazo.. Jefferson Ramiro Frías Moyón. iv.
(5) DEDICATORIA. A Dios, por darme la oportunidad de seguir avanzando día a día a la especialización técnica en mi vida. Por los momentos difíciles y los triunfos, mismos que me han formado para valorar las cosas que existen en mi vida personal. A mis padres por ser las personas que siempre han tenido un sabio consejo diario y sobre todo una sencilla y dulce palabra de apoyo en todo este trayecto de mi vida estudiantil desde muy pequeño hasta el presente. A toda mi familia, quienes con sus inteligentes palabras han aportado con un granito de arena para mi formación personal única, que a su vez han fomentado buenos valores y apoyo moral.. Jefferson. v.
(6) AGRADECIMIENTO. Quiero agradecer de manera muy especial a mis padres por ser los gestores de este gran sueño que estoy alcanzando, por todo su apoyo directo sobre mi trabajo de titulación que gracias a eso se lo pudo llevar a cabo, de la misma manera a toda mi familia. A todos los docentes de la Facultad de Informática y Electrónica por sus aportes e ideas en beneficio de mi tema de titulación, un agradecimiento profundo y sincero al Ing. Edwin Altamirano Santillán Director de Tesis y al Ing. Freddy Chávez, Miembro del Tribunal por su valiosa guía y asesoramiento a lo largo de la elaboración del Trabajo de Titulación. Quiero dar las gracias a todas las personas que de una u otra manera han aportado directa e indirectamente en la realización de este proyecto; por la confianza y el apoyo brindado por parte de ellos.. Jefferson. vi.
(7) TABLA DE CONTENIDO. ÍNDICE DE TABLAS ................................................................................................................. x ÍNDICE DE FIGURAS .............................................................................................................. xi ÍNDICE DE GRÁFICOS......................................................................................................... xiv INDICE DE ECUACIONES .................................................................................................... xv INDICE DE ABREVIATURAS .............................................................................................. xvi RESUMEN................................................................................................................................ xix ABSTRACT ............................................................................................................................... xx INTRODUCCIÓN ...................................................................................................................... 1 CAPÍTULO I. 1.. MARCO TEÓRICO REFERENCIAL ........................................................................ 4. 1.1.. Robótica .......................................................................................................................... 4. 1.1.1. Introducción a la robótica ............................................................................................... 4 1.1.2. Definición de robótica ..................................................................................................... 5 1.1.3. Historia de la robótica ..................................................................................................... 6 1.1.4. Leyes de la robótica ......................................................................................................... 6 1.1.5. Autómatas o mecanismos más relevantes a los largo de la historia .............................. 7 1.1.6. Clasificación de la robótica ............................................................................................. 8 1.2.. Micro controlador ........................................................................................................ 13. 1.2.1. Introducción a los micros controladores ...................................................................... 13 1.2.2. Funcionamiento ............................................................................................................ 14 1.2.3. Partes de un microcontrolador ..................................................................................... 15 1.2.4. Familias AVR y PIC ...................................................................................................... 16 1.2.5. Atmega ........................................................................................................................... 17 1.2.6. Arduino .......................................................................................................................... 17 1.2.7. Comunicación serial asíncrona .................................................................................... 20 1.3.. Actuadores .................................................................................................................... 21. 1.3.1. Hidráulico ...................................................................................................................... 22 1.3.2. Neumáticos .................................................................................................................... 22 1.3.3. Eléctricos ....................................................................................................................... 22 1.4.. Sensores ......................................................................................................................... 24. 1.4.1. Tipos de sensores ........................................................................................................... 24 1.5.. Sistema de comunicación inalámbrica ....................................................................... 27 vii.
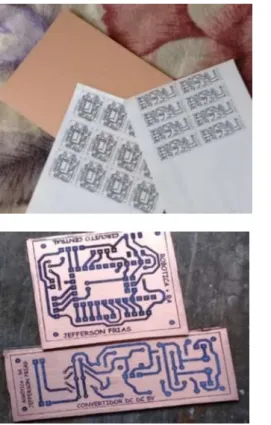
(8) 1.5.1. Tipos de comunicación inalámbrica ............................................................................. 28 1.6.. Sistema de alimentación para robots .......................................................................... 31. 1.6.1. Concepto ........................................................................................................................ 31 1.6.2. Tipos de baterías ............................................................................................................ 31 1.6.3. Capacidad de la batería ................................................................................................. 35 1.7.. Robótica y Monitoreo en tiempo real ......................................................................... 36. 1.8.. Sistema de transmisión de imágenes con cámara inalámbrica ................................ 37. 1.8.1. Funcionamiento ............................................................................................................ 37 1.8.2. Epoc Cam - Software..................................................................................................... 38 1.9.. Realidad virtual y Realidad aumentada..................................................................... 38. 1.9.1. Características fundamentales ...................................................................................... 39 1.9.2. Elementos que componen un sistema de realidad aumentada .................................... 40 1.9.3. Tipos de tecnologías aplicadas en realidad aumentada ............................................... 41 1.9.4. Aplicaciones de realidad aumentada .......................................................................... 44 1.9.5. Realidad virtual vs realidad aumentada ....................................................................... 46 1.9.6. Herramientas para la implementación de aplicaciones de realidad aumentada ........ 47 1.9.7. Aumentaty Author ......................................................................................................... 48 1.9.8. Sketch Up – Herramienta de diseño 3D ....................................................................... 49 1.10.. Software de diseño estructural 3d – Solid Works ..................................................... 50. CAPÍTULO II. 2.. MARCO METODOLÓGICO ..................................................................................... 51. 2.1.. Introducción.................................................................................................................. 51. 2.2.. Determinación de los requerimientos del prototipo .................................................. 52. 2.3.. Diseño del sistema mecánico y modelado 3D en Solid Works .................................. 53. 2.3.1. Pieza base 1.................................................................................................................... 53 2.3.2. Pieza base 2.................................................................................................................... 54 2.3.3. Pieza base 3.................................................................................................................... 54 2.3.4. Pieza soporte Sensor de presencia Sharp ..................................................................... 55 2.3.5. Pieza soporte motor DC................................................................................................. 55 2.4.. Diseño del sistema electrónico y PCBs ....................................................................... 56. 2.4.1. Diseño del módulo electrónico principal ...................................................................... 56 2.4.2. Diseño del módulo electrónico regulador de 5v ........................................................... 58 2.4.3. Selección del Driver para el control de los motores DC .............................................. 60 2.4.4. Selección de Servomotores para brazo de cámara ....................................................... 61 2.4.5. Selección del brazo giratorio para cámara ................................................................... 62 2.4.6. Selección del sensor GPS - NEO 6M ............................................................................ 63. viii.
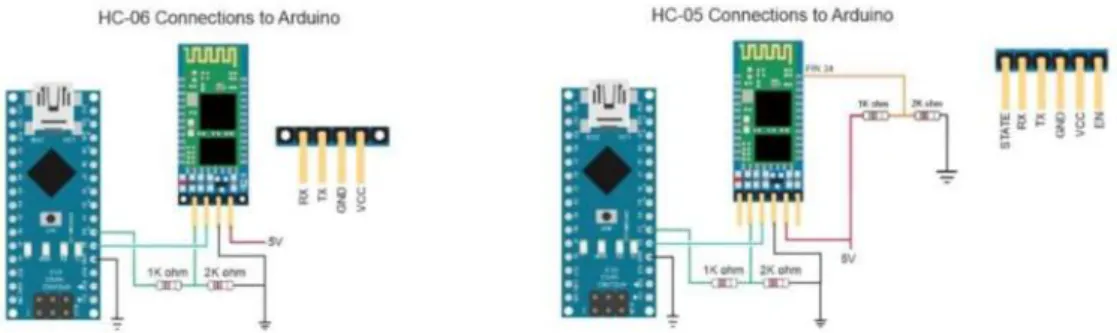
(9) 2.4.7. Selección del LCD ......................................................................................................... 64 2.4.8. Selección del Sensor de Distancia– Sharp GP2Y0A21 ................................................ 65 2.4.9. Selección del módulo de comunicación inalámbrica Bluetooth .................................. 66 2.4.10. Selección del sistema de comunicación ........................................................................ 70 2.4.11. Selección del Router inalámbrico ................................................................................. 72 2.4.12. Selección del dispositivo de control (microcontrolador) .............................................. 73 2.4.13. Selección del sistema de alimentación .......................................................................... 75 2.5.. Programación del módulo Arduino ............................................................................ 75. 2.5.1. Desarrollo de los procesos en el software Arduino ...................................................... 76 2.6.. Selección del software para interfaces de Realidad Aumentada.............................. 77. 2.6.1. Diseño de modelos 3D Sketch-Up ................................................................................. 77 2.6.2. Generación de Códigos QR y aplicación en Aumentaty Author ................................. 80 CAPÍTULO III. 3.. ANÁLISIS Y RESULTADOS ..................................................................................... 87. 3.1.. Introducción.................................................................................................................. 87. 3.2.. Evaluación del proyecto ............................................................................................... 87. 3.2.1. Ambiente de trabajo....................................................................................................... 87 3.2.2. Lugar de Pruebas .......................................................................................................... 88 3.2.3. Características del terreno ............................................................................................ 89 3.2.4. Ubicación de la cabina principal de control................................................................. 90 3.2.5. Características de transmisión ...................................................................................... 91 3.3.. Pruebas Generales del prototipo ................................................................................. 92. 3.3.1. Prueba de nivel de aceptación del prototipo ................................................................. 92 3.3.2. Autonomía del prototipo en el modo de tracción ......................................................... 93 3.3.3. Estabilidad de la plataforma ......................................................................................... 93 3.3.4. Análisis de descarga de la batería principal ................................................................. 94 3.3.5. Prueba del sistema de Comunicaciones........................................................................ 97 3.3.6. Pruebas del Software de control ................................................................................... 98 3.3.7. Prueba de la interfaz de Realidad Aumentada ............................................................. 99 3.4.. Análisis económico para implementación del prototipo ......................................... 102. CONCLUSIONES ................................................................................................................... 103 RECOMENDACIONES ......................................................................................................... 104 BIBLIOGRAFÍA ANEXOS. ix.
(10) ÍNDICE DE TABLAS. Tabla 1-1:. Autómatas más relevantes de la historia................................................................. 7. Tabla 2-1:. Características de diferentes modelos de placas de Arduino ................................ 18. Tabla 3-1:. Especificaciones técnicas Motor DC .................................................................... 24. Tabla 4-1:. Realidad aumentada vs Realidad virtual .............................................................. 46. Tabla 1-2:. Componentes del circuito de control principal ..................................................... 57. Tabla 2-2:. Componentes del circuito módulo regulador de 5v .............................................. 59. Tabla 3-2:. Características técnicas del puente H L298N ....................................................... 60. Tabla 4-2:. Especificaciones técnicas Micro Servo SG90 ...................................................... 61. Tabla 5-2:. Especificaciones Técnicas Sensor GPS NEO-6M ................................................ 63. Tabla 6-2:. Características técnicas del LCD seleccionado .................................................... 64. Tabla 7-2:. Especificaciones Técnicas Módulo Adaptador I2C .............................................. 64. Tabla 8-2:. Especificaciones Técnicas Módulo Bluetooth HC-05 .......................................... 67. Tabla 9-2:. Características del Router CISCO Linksys N600 E2500 ..................................... 72. Tabla 10-2: Especificaciones del Router CISCO Linksys N600 E2500 .................................. 72 Tabla 11-2: Señales de entrada y salida del sistema ................................................................ 74 Tabla 12-2: Especificación técnica Batería Lipo Turnigy ....................................................... 75 Tabla 1-3:. Tiempo de duración en minutos de la batería ....................................................... 95. Tabla 2-3:. Corrientes Nominales de Trabajo en cada dispositivo en modo Operación/Reposo .. 96. Tabla 3-3:. Prueba de conexión Wifi a determinadas distancias............................................. 97. Tabla 4-3:. Prueba distancia de conexión Bluetooth ............................................................... 98. Tabla 5-3:. Registro de calificación Software Arduino RC .................................................... 99. Tabla 6-3:. Distancia mínima para visualización de información ......................................... 101. Tabla 7-3:. Análisis de costos del proyecto general .............................................................. 102. x.
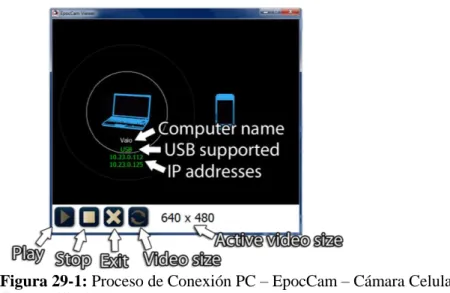
(11) ÍNDICE DE FIGURAS. Figura 1-1: Microcontrolador PIC16F628A ............................................................................ 14 Figura 2-1: Arquitectura Von Neumann – Microcontrolador .................................................. 15 Figura 3-1: Arquitectura Harvard ............................................................................................ 15 Figura 4-1: Partes de un Microcontrolador .............................................................................. 16 Figura 5-1: Módulos Arduino .................................................................................................. 18 Figura 6-1: Arduino Pro mini .................................................................................................. 19 Figura 7-1: USB-Serial chip FT232R ...................................................................................... 20 Figura 8-1: Comunicación Asincrónica y Sincrónica .............................................................. 21 Figura 9-1: Motor DC caja reductora y Llanta de Goma ......................................................... 23 Figura 10-1: Sensores de Contacto ............................................................................................ 25 Figura 11-1: Circuito de acoplamiento para sensor óptico ........................................................ 25 Figura 12-1: Tipos de sensores de temperatura ......................................................................... 26 Figura 13-1: Sensor de humedad ............................................................................................... 26 Figura 14-1: Sensor magnético .................................................................................................. 26 Figura 15-1: Sensor infrarrojo ................................................................................................... 27 Figura 16-1: Interfaz sensor ultrasónico .................................................................................... 27 Figura 17-1: Tipos de redes inalámbricas. ................................................................................. 28 Figura 18-1: Módulo WiFi para Arduino .................................................................................. 29 Figura 19-1: Módulo XBEE ...................................................................................................... 30 Figura 20-1: Módulos Bluetooth para Arduino ......................................................................... 30 Figura 21-1: Batería de Plomo - Ácido ...................................................................................... 32 Figura 22-1: Batería de Gel ....................................................................................................... 32 Figura 23-1: Batería de Níquel Cadmio ..................................................................................... 33 Figura 24-1: Batería de Níquel e Hidruro Metálico ................................................................... 34 Figura 25-1: Batería de Iones de Litio ....................................................................................... 34 Figura 26-1: Batería Lipo .......................................................................................................... 35 Figura 27-1: Robot para monitoreo interno de edificio ............................................................. 36 Figura 28-1: Cámara Inalámbrica IP ......................................................................................... 37 Figura 29-1: Proceso de Conexión PC – EpocCam – Cámara Celular ...................................... 38 Figura 30-1: Elementos de Realidad Aumentada ...................................................................... 41 Figura 31-1: Código QR ............................................................................................................ 42 Figura 32-1: Entorno Gráfico de Trabajo Aumentaty Author ................................................... 42 Figura 33-1: Escaneo de código QR .......................................................................................... 43 Figura 34-1: Reconocimiento Realidad Aumentada mediante Geo localización ...................... 43 Figura 35-1: Reconocimiento Realidad Aumentada basado en gafas........................................ 44 xi.
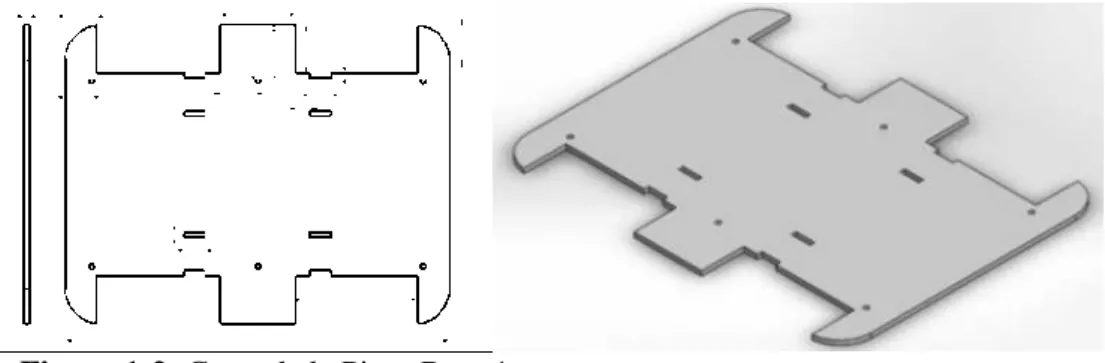
(12) Figura 36-1: Libro de realidad virtual........................................................................................ 45 Figura 37-1: Traductores Realidad Aumentada en tiempo real ................................................. 45 Figura 38-1: Publicidad en Realidad Aumentada ...................................................................... 46 Figura 39-1: Software de Realidad Aumentada Aumentaty Author .......................................... 49 Figura 40-1: Software de Diseño tridimensional SketchUp ...................................................... 49 Figura 41-1: Software de diseño estructural Solid Works ......................................................... 50 Figura 1-2: Cotas de la Pieza Base 1 ....................................................................................... 53 Figura 2-2: Cotas de la Pieza Base 2 ....................................................................................... 54 Figura 3-2: Cotas de la Pieza Base 3 ....................................................................................... 54 Figura 4-2: Cotas de la Pieza soporte Sensor Ultrasónico ....................................................... 55 Figura 5-2: Cotas de los soportes para Motor DC ................................................................... 55 Figura 6-2: Modelo 3D del prototipo final Robot Móvil ......................................................... 56 Figura 7-2: Proceso de Ruteado y PCB de placa electrónica principal ................................... 57 Figura 8-2: Elementos Placa Principal final ............................................................................ 58 Figura 9-2: Proceso de Ruteado y PCB de placa electrónica módulo 5v ................................ 59 Figura 10-2: Elementos Placa Regulador de 5v......................................................................... 60 Figura 11-2: Puente H L298N ................................................................................................... 60 Figura 12-2: Micro Servo SG 90 ............................................................................................... 61 Figura 13-2: Instrucciones para armado del kit Pan & Tilt ....................................................... 62 Figura 14-2: Kit Pan &b Tilt de 2 grados de libertad ................................................................ 62 Figura 15-2: Sensor GPS NEO – 6M......................................................................................... 63 Figura 16-2: Conexión Arduino Módulo I2C ............................................................................ 65 Figura 17-2: Información General Sensor Sharp ....................................................................... 65 Figura 18-2: Conexión Arduino módulo Bluetooth HC-05 ....................................................... 67 Figura 19-2: Comunicación entre la PC Arduino y Bluetooth .................................................. 68 Figura 20-2: Configuración del módulo HC-05......................................................................... 70 Figura 21-2: Módulo de Programación de Arduino Pro Mini ................................................... 70 Figura 22-2: Modelo inalámbrico Robot Móvil – Realidad Aumentada ................................... 71 Figura 23-2: Router Inalámbrico CISCO LinkSys E2500 ......................................................... 72 Figura 24-2: Comparación de tamaños Arduino Uno vs Arduino Pro Mini .............................. 73 Figura 25-2: Dispositivo de Programación Arduino Pro Mini – FT232R ................................. 73 Figura 26-2: Batería LiPo 2.65mAh / 3S / 20C ......................................................................... 75 Figura 27-2: Interfaz de programación Arduino ........................................................................ 76 Figura 28-2: Funcionamiento de la RA ..................................................................................... 77 Figura 29-2: Mezcla de la realidad con realidad aumentada ..................................................... 78 Figura 30-2: Espacio de trabajo del Software Sketch-Up 2017 ................................................. 78 Figura 31-2: Plano de trabajo Sketch UP................................................................................... 79 Figura 32-2: Modelos 3D realizados en el Software SketchUp para utilizarlos en RA ............. 80 Figura 33-2: Marcador con elementos básicos .......................................................................... 80. xii.
(13) Figura 34-2: Códigos QR utilizados en la aplicación de RA ..................................................... 81 Figura 35-2: Espacio de trabajo Aumentaty Author Software................................................... 82 Figura 36-2: Marcas RA Aumentaty Author Software .............................................................. 82 Figura 37-2: Códigos QR Marcas de RA................................................................................... 82 Figura 38-2: Importar archivo 3D – Aumentaty Author ............................................................ 83 Figura 39-2: Carga del archivo skb en la biblioteca de modelos RA ........................................ 83 Figura 40-2: Activación de webcam Aumentaty Author ........................................................... 83 Figura 41-2: Proceso Cámara + RA........................................................................................... 84 Figura 42-2: Modificaciones de tamaño en Aumentaty Author ................................................ 84 Figura 43-2: Sección Animación Aumentaty Author Software ................................................. 84 Figura 44-2: Sección Rotación Aumentaty Author Software .................................................... 85 Figura 45-2: Sección Escalado Aumentaty Author Software .................................................... 85 Figura 46-2: Sección Traslación Aumentaty Author Software.................................................. 85 Figura 1-3: Ubicación Satelital del lugar de prueba ................................................................ 88 Figura 3-3: Robot Móvil en los diferentes tipos de terrenos.................................................... 90 Figura 4-3: Ubicación de la cabina principal de control .......................................................... 91 Figura 5-3: Prueba de transmisión con el prototipo ................................................................. 91 Figura 6-3: Exposición de la propuesta en Concursos de Robótica ......................................... 92 Figura 7-3: Prueba de superficie inclinada en el edificio FIE-ESPOCH ................................. 94 Figura 8-3: Prueba de conexión Pc – Cámara wifi .................................................................. 97 Figura 9-3: Aplicación “Bluetooth RC CAR” ......................................................................... 98 Figura 10-3: Información que se visualiza en la pantalla del computador por cada marcador 100 Figura 11-3: Medición distancia mínima Robot – Marcador................................................... 101 Figura 12-3: Prototipo final adjunto al computador central..................................................... 102. xiii.
(14) ÍNDICE DE GRÁFICOS. Gráfico 1-2:. Etapas de diseño e implementación del prototipo .............................................. 52. Gráfico 2-2:. Diagrama de flujo Programa Principal Robot Móvil.......................................... 76. Gráfico 3-2:. Diagrama de flujo Identificar Marcador ............................................................. 86. Gráfico 1-3: Tiempo de duración en [min] de la batería ......................................................... 95 Gráfico 2-3:. Comparación de Consumo de Corrientes Nominales ......................................... 96. Gráfico 3-3:. Calificación Software Control Bluetooth RC Controller ................................... 99. xiv.
(15) INDICE DE ECUACIONES. Ecuación 1-1:. Duración de la Batería LiPo............................................................................. 35. Ecuación 1-2:. Rango de trabajo del sensor Sharp................................................................... 66. Ecuación 1-3:. Cálculo de ángulo de Inclinación..................................................................... 94. xv.
(16) INDICE DE ABREVIATURAS. JIRA. Asociación de Robots Industriales de Japón. RIA. Robotic Industries Association / Asociación de Industrias Robóticas. AFRI. Asociación Francesa de Robótica Industrial. ISO. Organización Internacional de Normalización. BRA. Asociación Brasileña de Robótica. RUR. Robots Universales de Rossum; obra Dorf 1988. AND. Compuerta lógica digital conjunción lógica. OR. Compuerta lógica digital disyunción lógica. NOT. Compuerta lógica digital negación lógica. CPU. Unidad Central de Procesamiento. AVR. Familia de micro controladores RISC del fabricante ATMEL. EEPROM. Memoria destinada al almacenamiento de datos.. I/O. Entrada / Salida. ALU. Unidad Aritmética Lógica. IDE. Entorno de Desarrollo Integrado. USB. Bus Serial Universal. C++. Lenguaje de Programación. RS-232. Estándar Recomendado 232 antiguo, intercambio de datos binarios. FT232R. Estándar Recomendado 232 actual, intercambio de datos binarios. CLOCK. Oscilador de Reloj micro controlador. RX. Receptor de comunicación. TX. Transmisor de comunicación. BAUD RATE Tasa de baudios DC. Corriente Directa. xvi.
(17) RPM. Revoluciones por minuto. mA. miliamperios. mm. milímetros. GSM. Sistema Global para las comunicaciones móviles. UMTS. Sistema Universal de Telecomunicaciones móviles. WiFi. Wireless Fidelity / Fidelidad Inalámbrica. DECT. Telecomunicaciones Inalámbricas Mejoradas Digitalmente. GPRS. Sistema global para las comunicaciones móviles. 3G. Tercera generación de transmisión de voz y datos por telefonía móvil.. LMDS. Sistema de Distribución Local Multipunto. IEEE 802.11. Estándar internacional que define las características de redes. WLAN. Red de área local inalámbrica. XBEE. Marca de la familia de módulos de radio comunicaciones.. GHz. GigaHerzios. HD. High Definition / Alta definición. GPS. Sistema de Posicionamiento Global. Pb. Plomo, Elemento Químico. PbO2. Óxido de plomo. HsSO4. Ácido Sulfúrico. Ni – Cd. Níquel Cadmio. Ni/MH. Níquel e hidruro metálico. Li-Ion. Iones de Litio. LiPo. Litio polímero. HUB. Concentrador o ethernet. SWITCH. Conmutador de red. LAN. Red de Área Local. IP. Protocolo de Internet. HC-SR04. Sensor de distancia Ultrasónico. xvii.
(18) UART. Transmisor-Receptor Asíncrono Universal. SBAS. Sistema de Aumentación Basado en Satélites Mundial. WAAS. Sistema de Aumentación Basado en Satélites de Estados Unidos. EGNOS. Sistema de Aumentación Basado en Satélites de la Agencia espacia Europea. MSAS. Sistema de Aumentación Basado en Satélite Multifuncional MTSAT. GAGAN. Sistema de Aumentación Basado en Satélite de la India. I2C. Circuito Inter-Integrado. SDA. Línea de Datos - Arduino. SCL. Línea de Reloj - Arduino. LCD. Liquid Cristal Display. BPS. Bits por Segundo. POIs. Localización de puntos de interés. GNU GPL. Licencia de Software Libre y Código Abierto. iOS. Sistema Operativo multifuncional de Apple Inc.. 2D. 2 Dimensiones / Bidimensional. 3D. 3 Dimensiones / Tridimensional. SDK. Kit de Desarrollo de Software. C#. Software de Programación C Sharp. C++. Lenguaje de Programación para micro controladores. AS3. Paquete de Software Adobe ActionScript 3. I+D|. Integral Derivativo, Sistema de Control. RA. Realidad Aumentada. xviii.
(19) RESUMEN. Se implementó un robot móvil controlado de forma remota, aplicado al monitoreo de edificios en tiempo real utilizando realidad aumentada, de fácil implementación, es un robot móvil de 4 ruedas con una precisión de 360 grados. Se realizó el diseño inicial 2D mediante el software de modelación SolidWorks, a continuación, se procedió a hacer el corte láser de acrílico para la estructura mecánica. Mediante la recopilación de información de investigaciones realizadas, se utilizó el programa Sketch-Up para diseñar los modelos 3D que posteriormente fueron utilizados para la aplicación de realidad aumentada en la plataforma Aumentaty Author, la misma que permitió almacenar dicha información en marcadores (Códigos QR) prediseñados dentro del programa; para la recolección de las imágenes en tiempo real se utilizó la cámara de un teléfono móvil android que junto a los archivos de instalación se obtuvo una exitosa recepción y transmisión de video en tiempo real, todo este sistema trabaja perfectamente gracias a la comunicación de un Router Inalámbrico CISCO E2500 configurado previamente; y la comunicación del módulo HC-05 Bluetooth para el control de movimientos del robot. Fue necesario utilizar el software Proteus en el cual se efectuaron los modelos de los circuitos PCB, finalmente y con la experimentación previa se decidió utilizar una batería LiPo de 11.1 voltios a 2.65 Amperios. Se concluye que la aplicación directa de este modelo, ayudaría al monitoreo en tiempo real de todas las actividades que sucedan en el interior del edificio, descubrir anomalías en sus alrededores a su vez la inclusión de realidad aumentada con el objetivo de facilitar a las personas la apropiación de nuevos conocimientos disciplinarios y su transferencia en diferentes campos para la resolución de problemas de manera heurística.. PALABRAS. CLAVES:. <TECNOLOGÍA. Y. CIENCIAS. DE. LA. INGENIERÍA>,. <ROBÓTICA>, <COMUNICACIONES INALÁMBRICAS>, <CÁMARA IP>, <SENSORES DE DISTANCIA>, <SISTEMA DE POSICIONAMIENTO GLOBAL (GPS)>, <REALIDAD AUMENTADA>, <AUMENTATY AUTHOR (SOFTWARE)>.. xix.
(20) ABSTRACT. A remotely controlled mobile robot was implemented, applying real-time building monitoring using augmented reality, easy to implement, it is a 4-wheel mobile robot with 360-degree precision. The initial 2D design was made using the SolidWorks modeling software, then the acrylic laser cut was made for the mechanical structure. Through the collection of research information, the Sketch-Up program was used to design the 3D models that were subsequently used for the augmented reality application on the Aumentaty Author platform, which allowed to store such information in markers (QR Codes) predesigned within the program; for the collection of the images in real time the camera of an android mobile phone was used, which together with the installation files was a successful reception and transmission of video in real time, this whole system works perfectly thanks to the communication of a router Wireless CISCO E2500 pre-configured; and the communication of the HC-05 Bluetooth module for the control of robot movements. It was necessary to use the Proteus software in which the models of the PCB circuits were made, finally and with previous experimentation, it was decided to use a LiPo battery from 11.1 volts to 2.65 Amperes. It is concluded that the direct application of this model would help the real-time monitoring of all the activities that take place inside the building, discover anomalies in its surroundings, in turn, the inclusion of augmented reality in order to facilitate people appropriation of new disciplinary knowledge and its transfer in different fields to solve problems in a heuristic way.. KEYWORDS: <ENGINEERING TECHNOLOGY AND SCIENCE>, <ROBOTICS>, <WIRELESS COMMUNICATIONS>, <IP CAMERA>, <DISTANCE SENSORS>, <GLOBAL. POSITIONING. SYSTEM. <AUMENTATY AUTHOR (SOFTWARE)>.. xx. (GPS)>,. <INCREASED. REALITY>,.
(21) INTRODUCCIÓN. Hoy en día el desarrollo de nuevas tecnologías de información, acceso a la educación y sobre todo el gran apoyo que se brinda a las diferentes actividades de investigación han hecho que ramas como la Electrónica, Robótica, Informática entre otras, logren su mayor auge en estos tiempos, brindando la posibilidad de crear nuevas propuestas tecnológicas en beneficio de la comunidad; esto ha generado una evolución de los sistemas anteriormente mencionados. La invasión de los nuevos robots es posible porque son máquinas sencillas baratas y muy efectivas para las labores que se diseñan.. Partiendo desde este punto es necesario empezar a incursionar en nuevas formas de tecnología y/o desarrollo, como el procesamiento de imágenes, transmisión inalámbrica, realidad aumentada, robots móviles, apoyo a la comunidad, etc. Todo esto ayuda a complementar el análisis y aplicación para el proceso de monitoreo en tiempo real que propone este proyecto.. En el presente trabajo de titulación, se realizó un robot móvil controlado inalámbricamente que permite realizar un monitoreo de actividades para edificios; además de que el prototipo puede ser utilizado para tomar imágenes del espacio real y gracias a un software poder visualizar diseños 3D en Realidad Aumentada, dicho sistema se puede utilizar para Publicidad, Educación y sobre todo que sirva como plataforma para experimentar nuevas aplicaciones. (Angulo Usateguí, 2005). ANTECEDENTES. Para buena parte de nuestra sociedad un robot es mucho más que un conjunto de mecanismos y electrónica, capaz de trabajar de manera ininterrumpida fabricando bienes de consumo. Los robots sugieren modernidad y avance científico, reflejando en épocas pasadas, presentes y seguramente futuras, muchas de las expectativas del progreso tecnológico. (Barrientos, 2007, p. xi). La invasión de los nuevos robots es posible porque son máquinas sencillas baratas y muy efectivas para las labores que se diseñan (Angulo Usateguí, 2005, p. xvii); por ende la oferta de proyectos dentro de este campo es muy limitada dentro del país, existiendo pocas aplicaciones de realidad aumentada tales como, Impacto de la Realidad Aumentada móvil aplicada en la 1.
(22) Medicina (Yasaca Pucuna, 2015), Pizarra Virtual usando Realidad Aumentada (Caguana Tibán, 2015),Realidad Aumentada aplicada en publicidad (Dávalos Arias, 2014), etc. En el mundo existe un prototipo comercial llamado Mekamon, desarrollado por la empresa Xiaomi de China, el robot que utiliza la realidad aumentada para combatir en el salón. Mekamon es un drone terrestre con forma arácnida que mide 40x40x15 cm de pie, este robot convertirá cualquier espacio en un campo de batalla virtual. El usuario no ve la recreación a menos que utilice la app -Mekamon de Play Store Android- dedicada del robot para smartphones y su función de realidad aumentada. El terminal se conectará vía Bluetooth con el juguete, mostrando en la pantalla nuevos detalles que no existen en la realidad y enemigos que intentarán batir al tanque robotizado. (Betech, 2016). Además del robot Xiami Chino, dentro del país tenemos una plataforma similar que es utilizada para el mejoramiento del aprendizaje y entretenimiento para niños de Primaria (Chimbo Tamami & Jiménez Caiza, 2017); finalmente partiendo desde estos 2 punto es necesario empezar a incursionar en nuevas formas de tecnología y/o desarrollo; como el procesamiento de imágenes, transmisión inalámbrica, realidad aumentada, robots móviles, apoyo a la comunidad, etc; todo esto ayudaría a complementar el análisis y aplicación para el proceso de monitoreo en tiempo real que propone este proyecto.. FORMULACIÓN DEL PROBLEMA. ¿Cómo influirá la Realidad Aumentada en el desarrollo de un Robot Móvil Controlado de forma remota para el monitoreo del edificio de la FIE–ESPOCH en tiempo real?. SISTEMATIZACIÓN DEL PROBLEMA. ¿Cuál es la ventaja de analizar la información existente sobre robots móviles y realidad aumentada? ¿De qué manera ayudaría el diseño de un prototipo robótico acorde a los espacios de trabajo? ¿De qué manera ayudaría la implementación del prototipo con los dispositivos previamente seleccionados? ¿Cuál es la ventaja de verificar el funcionamiento del robot móvil en el monitoreo del edificio de la FIE en tiempo real? 2.
(23) OBJETIVOS. Objetivo General. Implementar un Robot Móvil Controlado de forma remota, aplicado al monitoreo del edificio de la FIE en tiempo real utilizando Realidad Aumentada.. Objetivos Específicos. Analizar la información que existe referente a robots móviles y realidad aumentada. Diseñar el prototipo robótico acorde a los requerimientos del espacio de trabajo analizados. Implementar el prototipo con los dispositivos previamente seleccionados. Verificar y validar la información referente al robot móvil y la realidad aumentada.. 3.
(24) CAPÍTULO I. 1.. MARCO TEÓRICO REFERENCIAL. 1.1.. Robótica. 1.1.1.. Introducción a la robótica. El tema de la Robótica es relevante en el plan de estudios de ingeniería hoy en día debido a la capacidad de los robots para realizar trabajos incesantes y peligrosos. Un robot sólo tiene sentido cuando su intención es la de relevar a un trabajador humano de una labor diaria, desagradable o demasiado precisa. Normalmente, un robot es diseñado para que asista a un trabajador humano. Al contrario de lo que por lo general se cree, en realidad no es más rápido que los humanos en la mayoría de las aplicaciones, pero es capaz de mantener su velocidad durante largo período. De esto resulta que la productividad aumenta si la cantidad de piezas que se va a producir es numerosa grande. Además, la inteligencia de los robots más avanzados de la actualidad no se acerca a la humana. Por lo tanto, la introducción de un robot en un proceso si el entendimiento real de los beneficios que puede proporcionar sería desastrosa y no es aconsejable. (Subir Kumar, 2010, p. 1). Los robots son máquinas en las que se integran componentes mecánicos, eléctricos, electrónicos y de comunicaciones dotadas de un sistema informático para su control en tiempo real, percepción del entorno y programación. La robótica es todavía una disciplina relativamente joven. En efecto, aunque el término robot se acuña en los años veinte del pasado siglo, la robótica industrial nace en los cincuenta y solo en 4.
(25) los setenta comienzan a impartirse cursos de robótica en un gran número de universidades. (Ollero Baturone, 2001, p. xvii). En la primera mitad de los años setenta también se crean las primeras asociaciones nacionales de robótica, siendo las más importantes JIRA (Japan Industrial Robot Association), la RIA (Robot Institute of America) y la AFRI (Association Francaise de Robotique Industrielle). (Olier Caparroso, 1999, p. 53). 1.1.2.. Definición de robótica. El robot se define, de manera formal en la Organización Internacional para la Estandarización (ISO), como un manipulador multifuncional reprogramable, capaz de mover materiales, piezas o dispositivos especiales, a través de movimientos variables programados, para el desempeño de tareas diversas. Existen otras definiciones dadas por otras asociaciones, como por ejemplo, RIA, JIRA, BRA y otras. Todas ellas coinciden en dos puntos: la capacidad de reprogramación y la multifuncionalidad de los robots. En términos generales, los robots son clasificados como industriales, no industriales o para usos especiales (Subir Kumar, 2010, p. 5). En comparación de los grandes robots industriales, los robots a los que nos referimos en esta obra, también llamados micro robots o microbot, parecen un simple juguete. Pueden tener forma de vehículo, de animal, de criatura robótica; pero todos tienen una característica común: la inteligencia necesaria para realizar tareas en un entorno que puede variar y al cual se pueden adaptar. Un microbot es un pequeño robot móvil y programable que realiza una sencilla tarea. Su cerebro consiste en un micro controlador que gobierna todas sus acciones y según el trabajo encomendado precisa de un programa concreto y de unas entradas de información y salidas para los actuadores. Su tamaño, potencia y precio es considerablemente menor al de un robot industrial, pero sobre todo difiere de éste en el tipo de tareas a que se dedica. (Angulo Usateguí, 2005, p. 5). 5.
(26) 1.1.3.. Historia de la robótica. Aunque la idea de los robots se remonta a tiempos antiguos, hace más de 3000 años en la leyenda hindú de los elefantes mecánicos (Fuller, 1999), la palabra robot se usó por primera vez en 1921, en la obra de teatro Rossum’s Universal Robots (RUR), escrita por el checo Karel Capek (1980-1938). En la obra RUR (Dorf, 1988), es un fabricante ficticio de criaturas mecánicas diseñaba robots para reemplazar a trabajadores humanos. Eficientes pero completamente faltos de emociones, se pensaba al principio que estos robots eran mejores que las personas, puesto que hacían lo que se les ordenaba sin preguntar. Al final, los robots se volvieron contra sus amos. Acabaron con la raza humana, salvo un solo hombre para que pudiera seguir produciendo más robots. Desgraciadamente, la fórmula se había perdido en la destrucción causada por los robots. Este sentimiento de odio hacia los robots parece existir hasta hoy. El miedo de que vayan a apoderarse del trabajo de las personas ha dado como resultado el retraso en el desarrollo en esta área. Sin embargo, Isaac Asimov, en sus historias de ciencia ficción de los años cuarenta, se imaginaba al robot como ayudante de la humanidad y postulaba tres reglas básicas para robots. Por lo general, éstas se conocen como las leyes de la robótica. (Subir Kumar, 2010, p. 2). 1.1.4.. Leyes de la robótica. i. Un robot no puede dañar a un ser humano ni, por su inacción, dejar que un ser humano sufra daño. ii. Un robot debe obedecer las órdenes que le son dadas por un ser humano, excepto si éstas entran en conflicto con la primera ley. iii. Un robot debe proteger su propia existencia, a menos que ésta entre en conflicto con las dos primeras leyes. Más tarde, Fuller (1999) introdujo una cuarta ley que dice: 6.
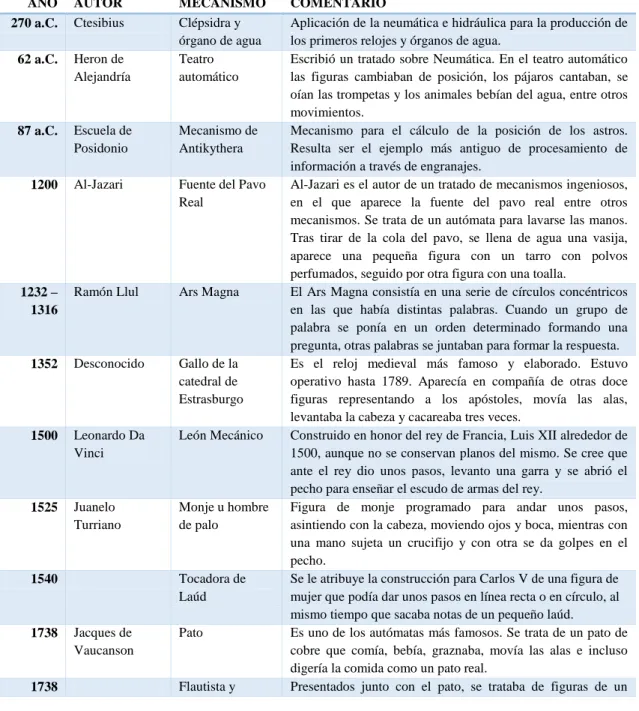
(27) iv. Un robot podrá tomar el trabajo de un ser humano, pero no debe dejar a esta persona sin empleo. (Subir Kumar, 2010, p. 2). 1.1.5.. Autómatas o mecanismos más relevantes a los largo de la historia. A continuación en la siguiente tabla se muestran los distintos prototipos robóticos que se han sido creados a lo largo del tiempo.. Tabla 1-1: Autómatas más relevantes de la historia AÑO 270 a.C.. AUTOR Ctesibius. 62 a.C.. Heron de Alejandría. MECANISMO Clépsidra y órgano de agua Teatro automático. 87 a.C.. Escuela de Posidonio. Mecanismo de Antikythera. Al-Jazari. Fuente del Pavo Real. Ramón Llul. Ars Magna. 1352. Desconocido. Gallo de la catedral de Estrasburgo. 1500. Leonardo Da Vinci. León Mecánico. 1525. Juanelo Turriano. Monje u hombre de palo. 1200. 1232 – 1316. Tocadora de Laúd. 1540. 1738. 1738. Jacques de Vaucanson. Pato. Flautista y. COMENTARIO Aplicación de la neumática e hidráulica para la producción de los primeros relojes y órganos de agua. Escribió un tratado sobre Neumática. En el teatro automático las figuras cambiaban de posición, los pájaros cantaban, se oían las trompetas y los animales bebían del agua, entre otros movimientos. Mecanismo para el cálculo de la posición de los astros. Resulta ser el ejemplo más antiguo de procesamiento de información a través de engranajes. Al-Jazari es el autor de un tratado de mecanismos ingeniosos, en el que aparece la fuente del pavo real entre otros mecanismos. Se trata de un autómata para lavarse las manos. Tras tirar de la cola del pavo, se llena de agua una vasija, aparece una pequeña figura con un tarro con polvos perfumados, seguido por otra figura con una toalla. El Ars Magna consistía en una serie de círculos concéntricos en las que había distintas palabras. Cuando un grupo de palabra se ponía en un orden determinado formando una pregunta, otras palabras se juntaban para formar la respuesta. Es el reloj medieval más famoso y elaborado. Estuvo operativo hasta 1789. Aparecía en compañía de otras doce figuras representando a los apóstoles, movía las alas, levantaba la cabeza y cacareaba tres veces. Construido en honor del rey de Francia, Luis XII alrededor de 1500, aunque no se conservan planos del mismo. Se cree que ante el rey dio unos pasos, levanto una garra y se abrió el pecho para enseñar el escudo de armas del rey. Figura de monje programado para andar unos pasos, asintiendo con la cabeza, moviendo ojos y boca, mientras con una mano sujeta un crucifijo y con otra se da golpes en el pecho. Se le atribuye la construcción para Carlos V de una figura de mujer que podía dar unos pasos en línea recta o en círculo, al mismo tiempo que sacaba notas de un pequeño laúd. Es uno de los autómatas más famosos. Se trata de un pato de cobre que comía, bebía, graznaba, movía las alas e incluso digería la comida como un pato real. Presentados junto con el pato, se trataba de figuras de un. 7.
(28) Tamborilero. metro y ochenta centímetros sobre un pedestal. El flautista, a través de una corriente de aire y el movimiento de labios y dedos era capaz de tocar doce melodías distintas. Se trataba de una máquina capaz de escribir pasajes de hasta 107 palabras. Podía escribir cualquier texto compuesto anteriormente o proveniente de un dictado tras el operador presionar las teclas adecuadas. Los tres autómatas estaban operados por mecanismos de relojería basados en el uso de cadenas complejas de levas. El escriba y el dibujante tenían la forma de niños jóvenes, vestidos elegantemente. El escriba podía mojar la pluma en la tinta Tras un trabajo de veinte años, construyó una máquina capaz de reproducir los órganos vocales de los seres humanos, y con ello reproducir los distintos sonidos. Se trata de una muñeca de madera de unos 35cm de alto que sujeta una bandeja. Si se pone un recipiente con té sobre ella, la muñeca se mueve hacia delante. Si se le quita, se para. Si se le vuelve a poner, se da la vuelta y vuelve por donde ha venido. Es capaz de moverse más de medio metro en cada dirección. En un comienzo se trataba de la figura de un niño arrodillado con un lápiz en la mano, que eran capaz de escribir en inglés y francés y de dibujar paisajes. Posteriormente se transformó en una mujer.. 1760. Friedich von Knauss. Máquina de escritura automática. 1770 1772 1773. Jaquet - Droz. Escriba Organista Dibujante. 1778. Baron W. Von Kempelen. Máquina parlante. 1796. Hanzo Hosokawa. Muñeca para servir el té. 1805. Familia Maillardet. Muñeca capaz de dibujar. 1900. Leonardo Torres Quevedo. Máquinas algebraicas. Conjunto de máquinas capaces de resolver ecuaciones polinómicas por procedimientos estrictamente mecánicos. Destacan los aritmóforos, el tren exponencial y los husillos sinfín.. 1906. El Telekino. 1912. Máquina de Jugar Ajedrez. Dispositivo para el control a distancia de barcos y dirigibles median ondas Hertzianas. Las señales se asemejan a las del alfabeto Morse, que interpretadas dan lugar hasta una veintena de movimientos diferentes. Máquina que era capaz de jugar partidas de Torres y Rey con Rey. Para este tipo de partidas, se pueden dar una serie de reglas que aseguran jaque mate en un número determinado de movimientos.. Realizado por: Jefferson Frías, 2018 Fuente: (Barrientos, 2007, p. 3). 1.1.6.. Clasificación de la robótica. La potencia del software en el controlador determina a utilidad y flexibilidad del robot dentro de las limitantes del diseño mecánico y la capacidad de los sensores.. 8.
(29) Existe mucha información general en referencia a la clasificación de Robótica como tal; pero luego de un análisis respectivo exhaustivo pueden ser de los siguientes tipos: a.. Por su generación. La generación de un robot se determina por el orden histórico de desarrollos en la robótica. Cinco generaciones son normalmente asignadas a los robots industriales: . Primera generación El sistema de control está basado en las “paradas fijas” mecánicamente. Como ejemplo de esta primera etapa están los mecanismos de relojería que mueven las cajas musicales o los juguetes de cuerda.. . Segunda generación El movimiento se controla a través de una secuencia numérica almacenada en disco o cinta magnética. Por regla general, este tipo de robots se utiliza en la industria automotriz y son de gran tamaño.. . Tercera generación Utilizan las computadoras para su control y tienen cierta percepción de su entorno a través del uso de sensores. Con esta generación se inicia la era de los robots inteligentes y aparecen los lenguajes de programación para escribir los programas de control.. . Cuarta generación Se trata de robots altamente inteligentes con más y mejores extensiones sensoriales, para entender sus acciones y captar el mundo que los rodea, incorporan conceptos “modélicos” de conducta.. . Quinta generación Actualmente en desarrollo. Esta nueva generación de robots basará su acción principalmente en modelos conductuales establecidos. (Mata Hernandez, 2009).. 9.
(30) b.. Según su arquitectura generacional . Robots play-back Los cuales regeneran una secuencia de instrucciones grabadas como un robot utilizado en recubrimiento por spray o soldadura por arco. Estos robots comúnmente tienen un control de lazo abierto.. . Robots controlados por sensores Estos tienen. un control en lazo cerrado de movimientos manipulados, y hacen. decisiones basados en datos obtenidos por sensores. . Robots controlados por visión Donde los robots pueden manipular un objeto al utilizar información desde un sistema de visión.. . Robots controlados adaptablemente Donde los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.. . Robots con inteligencia artificial Donde los robots utilizan las técnicas de Inteligencia Artificial para hacer sus propias decisiones y resolver problemas.. . Robots médicos Fundamentalmente, prótesis para disminuidos físicos que se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precisión los movimientos y funciones de los órganos o extremidades que suplen.. . Androides Robots que se parecen y actúan como seres humanos. Los robots de hoy en día vienen en todas las formas y tamaños, pero a excepción de los que aparecen en las ferias y. 10.
(31) espectáculos, no se parecen a las personas y por tanto no son androides. Actualmente, los androides reales solo existen en la imaginación y en las películas de ficción. . Robots móviles Provistos de patas, ruedas u orugas que los capacitan para desplazarse de acuerdo su programación. Elaboran la información que reciben a través de sus propios sistemas de sensores y se emplean en determinado tipo de instalaciones industriales, sobre todo para el transporte de mercancías en cadenas de producción y almacenes. También se utilizan robots de este tipo para la investigación en lugares de difícil acceso o muy distantes, como es el caso de la exploración espacial y las investigaciones o rescates submarinos. (Mata Hernandez, 2009).. c.. Por su nivel de inteligencia. La Asociación de Robots Japonesa (JIRA) ha clasificado a los robots dentro de seis clases sobre la base de su nivel de inteligencia. . Dispositivos de manejo manual Controlados por una Persona.. . Robots de secuencia arreglada Son robots controlados por una persona de tal manera que hacen lo que la persona le ordena mediante un control remoto.. . Robots de secuencia variable Donde un operador puede modificar la secuencia fácilmente.. . Robots regeneradores Donde el operador humano conduce el robot a través de la tarea.. . Robots de control numérico Donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea. 11.
(32) . Robots inteligentes Los cuales pueden entender e interactuar con cambio en él. (Mata Hernandez, 2009). d.. Por su nivel de control. Los programas en el controlador del robot pueden ser agrupados de acuerdo al nivel de control que realizan o sus predictibilidades en las formas para realizar su función. . Nivel de inteligencia artificial Donde el programa aceptará un comando como “levantar el producto” y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas.. . Nivel de modo de control Donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados.. . Niveles de servosistemas Donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementados en este nivel.. e.. Por su lenguaje de programación. En la clasificación final se considerara el nivel del lenguaje de programación. La clave para una aplicación efectiva de los robots para una amplia variedad de tareas, es el desarrollo de lenguajes de alto nivel. Existen muchos sistemas de programación de robots, aunque la mayoría del software más avanzado se encuentra en los laboratorios de investigación. Los sistemas de programación de robots caen dentro de tres clases.. 12.
(33) . Sistemas guiados En el cual el usuario conduce el robot a través de los movimientos a ser realizados.. . Sistemas de programación de nivel-robot En los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.. . Sistemas de programación de nivel-tarea En el cual el usuario específica la operación por sus acciones sobre los objetos que el robot manipula. (Mata Hernandez, 2009).. 1.2.. Micro controlador. 1.2.1.. Introducción a los micros controladores. Aunque no los veamos, los microprocesadores y micro controladores están en todas partes. Son unos chips omnipresentes capaces de resolver tareas de diversas complejidades. Sus aplicaciones pueden ser infinitas y están en la industria, la robótica, la domótica y las comunicaciones. (Benchimol, 2011, p. 4). Antes de la existencia del micro procesador las personas no poseían una forma de diseñar circuitos electrónicos pequeños y de gran eficiencia, el diseño involucraba muchos componentes electrónicos basados en transistores, circuitos lógicos, resistencias. Lo que provocaba circuitos con muchos fallos y ajustes, además de éste inconveniente involucraba una gran cantidad de cálculos matemáticos. En el año de 1971 apareció el primer micro procesador lo que provoco un cambio radical en las técnicas de diseño de la mayoría de equipos electrónicos. En un principio se creía que el manejo de los micro procesadores involucraba un conocimiento intelectual superior sin embargo con el pasar de los años esto cambió, se hizo más fácil entender dando como resultado que los diseños electrónicos sean mucho más pequeños y simplificados, 13.
(34) estos diseños podían realizar una mayor cantidad de tareas en mucho menos tiempo. (Chamba Cruz & Jarrín Valencia, 2013, p. 44). Los Microprocesadores son circuitos integrados que contienen millones de transistores en su interior, los cuales crean circuitos complejos encargados de realizar diferentes tareas. También se los denomina Unidad de Procesamiento Central o CPU, ya que muchos de ellos pueden actuar como el “cerebro” de un sistema computacional, administrando todas las tareas que este realice y llevando a cabo las operaciones con los datos. Los microprocesadores están diseñados para interpretar y ejecutar las instrucciones que nosotros les indiquemos y que suelen ser operaciones simples, como sumar, restar, multiplicar y dividir. Pero también existen instrucciones lógicas, como AND, OR, NOT entre otras. El listado de instrucciones recibe el nombre de programa, que las ejecuta una por una por medio del microprocesador. La potencia, el tamaño y la complejidad de los microprocesadores fueron incrementándose con el correr del tiempo. Tanto es así que hoy en día podemos observar procesadores que integran millones de transistores en su interior y con varios núcleos para aumentar su capacidad de procesamiento. (Wikipedia, 2015). A continuación en la figura 1-1 se muestra el microcontrolador PIC16f628A.. Figura 1-1: Microcontrolador PIC16F628A Fuente: (Benchimol, 2011). 1.2.2.. Funcionamiento. Existen dos tipos de arquitecturas en micro controladores, la arquitectura Von Neumann y la arquitectura Harvard. A inicios los microcontroladores se adoptaron por la arquitectura Von Neumann, en la actualidad la arquitectura que está predominándolos es la Harvard.. 14.
(35) a.. Arquitectura Von Neumann. Un único bus de datos para instrucciones e información. Las instrucciones del programa y los datos se guardan conjuntamente en una memoria común. Cuando la CPU se dirige a la memoria principal, primero accede a la instrucción y después a los datos necesarios para ejecutarla, esto retarda el funcionamiento. (Universidad del centro de Buenos Aires, 2012).. Figura 2-1: Arquitectura Von Neumann – Microcontrolador Fuente: (Universidad del centro de Buenos Aires, 2012). b.. Arquitectura Harvard. El bus de datos y el bus de instrucciones están separados. El acceso se da en paralelo: “Cuando se está leyendo una instrucción, la instrucción actual está utilizando el bus de datos. Una vez finalizada la instrucción actual, la siguiente ya está disponible en la CPU”. Figura 3-1: Arquitectura Harvard Fuente: (Universidad del centro de Buenos Aires, 2012). 1.2.3.. Partes de un microcontrolador. Básicamente el micro controlador está conformado por tres partes principales, la memoria, la unidad central de procesamiento y periféricos de I /O; estos elementos son esenciales para el correcto funcionamiento de los micro controlador. a.. Memoria. Es el componente de los micros controladores en el cual se almacena toda la información necesaria durante un tiempo determinado. La información que será almacenada en memorias son las instrucciones de la programación y los diferentes datos necesarios para la ejecución del programa, de lo cual se pueden distinguir dos tipos de memoria.. 15.
(36) La memoria volátil que es la que se pierde al momento de desconectar el micro controlador, y la memoria no volátil que es aquella que no se pierde y se queda almacenada así se le quita la alimentación al micro controlador. b.. Unidad central de proceso. También es conocida por CPU, es el elemento más importante de micro procesador debido a que se ejecuta todas las instrucciones que se encuentren almacenadas en la memoria de dicho micro controlador. c.. Periféricos i / o.. Las unidades de I / O son de gran importancia para las micro controladores ya que estas nos permitirán enviar información al exterior por medio de las salidas e introducir información del exterior por medio de las entradas. Esta unidad nos permite la comunicación con el exterior. (Chamba Cruz & Jarrín Valencia, 2013, p. 48) En la figura 4-1 se muestra las partes que posee un microcontrolador.. Figura 4-1: Partes de un Microcontrolador Fuente: (Atlantic Internationl University, 2008). 1.2.4.. Familias AVR y PIC. En los años recientes el mundo de la electrónica y en especial el diseño de sistemas embebidos basados en microcontroladores ha sido el escenario de una batalla entre dos grupos de diseñadores de estos sistemas, un grupo está formado por aquellos entusiastas en electrónica que usan los microcontroladores de la familia PIC del fabricante MICROCHIP y otro grupo lo forman las personas que prefieren diseñar sistemas basados en los microcontroladores de la familia AVR de ATMEL.. 16.
(37) Los PIC son una familia de microcontroladores de 8 bits fabricados por la empresa MICROCHIP, cuentan con un CPU RISC y memoria FLASH para el almacenamiento del Firmware. Por otro lado los AVR son una familia fabricada por la compañía noruega ATMEL, estos microcontroladores de 8 bits cuenta con una CPU RISC y su memoria de programa viene implementada en FLASH. Ambas familias cuenta con periféricos como Puertos Digitales, ADC, PWM, entre otros. Basado en esta descripción, se podría pensar que los PIC y AVR son iguales, en cierto modo sí, desde un punto de vista de estructura general, pero es el ámbito que rodea esta estructura para el desarrollo de sistemas embebidos, es donde encontramos diferencia entre ambos microcontroladores, en indicadores como Lenguaje de programación, IDE, interfaces para la programación, reloj interno, voltaje de alimentación, potencia, costo, etc. (Flores Cortez, 2009).. 1.2.5.. Atmega. Es un tipo de micro controlador de la familia de los AVR de 8 bits, éste tiene algunas variantes como: . Dimensión del código. . Dimensión de EEPROM. . Número de pines I/O. . Cantidad de Servicios. Tiene 32 registros, cada uno tiene su conjunto de instrucciones, estas instrucciones están directamente afines a la ALU. Este presenta algunas ventajas con relación a los micros controladores convencionales como por ejemplo una mayor eficiencia y ofrece una transferencia de datos de diez veces más rápido. (Chamba Cruz & Jarrín Valencia, 2013, p. 49). 1.2.6.. Arduino. Es una plataforma de código abierto utilizada para la construcción de proyectos de electrónica. Arduino consiste en una placa de circuito programable física y una pieza de software, o IDE 17.
(38) (Entorno de desarrollo integrado) que se ejecuta en su computadora, que se unas para escribir y cargar códigos de computadora en la placa física. La plataforma Arduino se ha vuelto bastante popular entre las personas que recién comienzan con productos electrónicos, y por una buena razón. A diferencia de la mayoría de las placas de circuitos programables anteriores, Arduino no necesita una pieza de hardware separada para cargar código nuevo en la placa, simplemente puede usar un cable USB. Además, Arduino IDE utiliza una versión simplificada de C++, por lo que es más fácil aprender a programar. Finalmente, Arduino proporciona un factor de forma estándar que divide las funciones del micro controlador en un paquete más accesible. (SparkFun, 2016).. Figura 5-1: Módulos Arduino Fuente: http://recursos.cepindalo.es/mod/book/tool/print/index.php?id=2886. Tabla 2-1: Características de diferentes modelos de placas de Arduino Modelo. Voltaje de entrada. Frecuencia de reloj. E/S digitales. Arduino Due. 5-12V. 84MHz. 54*. 12. 12. Arduino Leonardo. 7-12V. 16MHz. 20*. 12. 7. Arduino Uno -R3. 7-12V. 16MHz. 14. 6. 6. Arduino Bluetooth. 7-15V. 16MHz. 14. 6. 6. RedBoard. 1.2-5,5V. 16MHz. 14. 6. 6. 8MHz. 14. 6. 6. 16MHz. 14. 6. 6. 16MHz. 54. 16. 14. Arduino Pro 3.3v/ 3.35 -12V 8MHz Arduino Pro 5v/ 5 - 12V 16MHz Arduino Mega 2560 R3 7-12V. E analógicas. PWM. Mega Pro 3.3v. 3.3-12V. 8MHz. 54. 16. 14. Mega Pro 5v. 5-12V. 16MHz. 54. 16. 14. Arduino Mini 05. 7-9V. 16MHz. 14. 6. 8. Arduino Pro Mini. 3.35-12V. 8MHz. 14. 6. 6. Arduino Pro Mini. 5 - 12V. 16MHz. 14. 6. 6. Arduino Fio. 3.35-12V. 8MHz. 14. 8. 6. 18.
(39) Mega Pro Mini 3.3V. 3.35-12V. 8MHz. 54. 16. 14. Pro Micro 5V/16MHz. 5-12V. 16MHz. 12. 4. 5. Pro Micro 3.3V/8MHz. 3.35-12V. 8MHz. 12. 4. 5. LilyPad Arduino 328. 2.7-5,5V. 8MHz. 14. 6. 6. LilyPad Arduino. 2.7-5,5V. 8MHz. 9. 5. 5. Realizador por: Jefferson Frías, 2018 Fuente: https://es.wikipedia.org/wiki/Arduino. a.. Arduino Pro Mini. Arduino Pro Mini está diseñado para usuarios avanzados que requieren flexibilidad, bajo costo y tamaño pequeño. Viene con el mínimo de componente (sin encabezados USB o pin incorporados) para mantener el costo bajo. Es una buena opción para una placa que quiera dejar incrustada en un proyecto. Tenga en cuenta que hay dos versiones de la placa: una que opera a 5V y otra que opera a 3.3V. Asegúrese de proporcionar la potencia correcta y utilice componente cuya tensión de funcionamiento coincida con la de la placa. El Arduino Pro Mini se programa utilizando el software Arduino (IDE), nuestro entorno de desarrollo integrado común a todos nuestros tableros y que funciona tanto en línea como fuera de línea. (Arduino, 2008).. Figura 6-1: Arduino Pro mini Fuente: http://www.microsolution.com.pk/product/arduino-pro-mini-in-pakistan/. 19.
Figure


+7


Documento similar