Mejoramiento de los índices de continuidad del servicio de energía eléctrica en sistemas de distribución, a partir de la determinación de la distancia a la falla
227
0
0
Texto completo
(2) MEJORAMIENTO DE LOS ÍNDICES DE CONTINUIDAD DEL SERVICIO DE ENERGÍA ELÉCTRICA EN SISTEMAS DE DISTRIBUCIÓN, A PARTIR DE LA DETERMINACIÓN DE LA DISTANCIA A LA FALLA. EVER JULIÁN CORREA TAPASCO Cod. 9865618 Tesis presentada como requisito para optar el título de: MAGISTER EN INGENIERÍA ELÉCTRICA. Director: PhD. JUAN JOSÉ MORA FLÓREZ. UNIVERSIDAD TECNOLÓGICA DE PEREIRA MAESTRÍA EN INGENIERÍA ELÉCTRICA PEREIRA 2012.
(3) Nota de aceptación: _________________________________ _________________________________ _________________________________ _________________________________ _________________________________ _________________________________. Presidente del jurado _________________________________. Director. _________________________________ Ingeniero Electricista Ph.D., Juan José Mora Flórez. Jurado 1. _________________________________ Ingeniero Electricista M.Sc. Carlos Alberto Ríos Porras. Jurado 2. _________________________________ Ingeniero Electricista Ph.D., Harold Salazar Isaza. Pereira, 11 de septiembre de 2012. 3.
(4) DEDICATORIA. A Dios por estar siempre a mi lado y darme la fortaleza necesaria para seguir siempre adelante. A mis Padres Lucelly y Luis, quienes dieron todo para alcanzar este sueño. A mis hermanas Nora, Marcela y Magnolia por la compañía y amor filial en todo este camino. A mis compañeros y director del grupo de investigación. A Valentina por regalarme una parte de su vida con su amistad, cariño y compañía.. Ever Julián Correa Tapasco. 4.
(5) AGRADECIMIENTOS. Al Ingeniero Ph.D., Juan José Mora Flórez, director del grupo de investigación ICEEE y del proyecto. Por su dirección, asesoría, gran disciplina y sabia orientación. A los compañeros del grupo de investigación: Lucas Pérez, Jaime Gutiérrez, Hamilton Peláez, Andrés Bedoya, Guillermo Marín, Cesar Orozco, Andrés Panesso, Juan y Mauricio, por sus importantes aportes para mejorar la calidad de esta tesis y por su calidad humana con el acompañamiento en las turbulencias de la vida. A los profesores de la Maestría en Ingeniería Eléctrica de la UTP, por las herramientas necesarias para el desarrollo de muchas de las etapas metodológicas de la tesis, además, por estar disponibles en su ejercicio profesional para las asesorías. A mi familia, por el apoyo incondicional en todos los aspectos de mi vida. A todas aquellas personas que de una u otra manera colaboraron para que este proyecto fuera posible.. Muchas gracias Ever Julián Correa Tapasco. 5.
(6) ÍNDICE GENERAL Pág. ÍNDICE GENERAL............................................................................................................... 6 ÍNDICE DE FIGURAS ........................................................................................................ 12 ÍNDICE DE TABLAS ......................................................................................................... 14 ÍNDICE DE ANEXOS ......................................................................................................... 16 1.. INTRODUCCIÓN ........................................................................................................ 17 1.1. Motivación................................................................................................................. 17 1.2. El problema de localización de fallas en sistemas de potencia ................................. 18 1.2.1. Fallas en sistemas de potencia ............................................................................ 19 1.2.2. Sistemas de transmisión ...................................................................................... 19 1.2.3. Sistemas de distribución ..................................................................................... 19 1.3. Métodos usados para localización de fallas en redes de distribución ....................... 20 1.3.1. Los MBM ............................................................................................................ 20 1.3.1.1. Efecto de la resistencia de falla............................................................... 21 1.3.1.2. Efecto de las cargas intermedias ............................................................. 21 1.3.2. Los MBC............................................................................................................. 21 1.4. Objetivos de la investigación .................................................................................... 22 1.5. Definición y acotamiento del problema .................................................................... 23 1.6. Definición del sistema de pruebas prototipo ............................................................. 24 1.7. Resultados y aportes de la tesis ................................................................................. 25 1.8. Estructura del documento .......................................................................................... 26. 2.. ASPECTOS TEÓRICOS .............................................................................................. 27 2.1. Métodos basados en la estimación de la impedancia ................................................ 27 2.1.1. Sistemas de distribución ..................................................................................... 27 2.1.1.1. Estimación de la distancia a la falla en sistemas de distribución............ 28. 6.
(7) 2.1.2. Método básico de la reactancia ........................................................................... 29 2.1.3. Componentes simétricas ..................................................................................... 30 2.1.4. Método de Novosel, Hart y Myllymaki .............................................................. 30 2.1.5. Método de gráficos de reactancia ....................................................................... 31 2.2. Métodos basados en minerías de datos ...................................................................... 32 2.2.1. Teoría Básica de los Métodos Basados en el Conocimiento (MBC) .................. 32 2.2.1.1. Análisis exploratorio de datos................................................................. 33 2.2.2. Técnica de regresión basada en MSV ................................................................. 34 2.2.2.1. Definición de la MSV para regresión ..................................................... 35 2.2.3. Técnica de regresión basada en k-NN ................................................................ 38 2.2.3.1. Mejoramiento de la estrategia utilizando ponderación de los datos ....... 40 2.2.4. Técnicas de Optimización ................................................................................... 41 3.. METODOLOGÍA PROPUESTA ................................................................................. 44 3.1. Metodologías propuestas basadas en la estimación de la impedancia (MBM) ......... 44 3.1.1. Método de localización de fallas MBM EJ1 ....................................................... 44 3.1.1.1. Introducción ............................................................................................ 44 3.1.1.2. Fundamentación teórica del método ....................................................... 45 a. Circuito equivalente en falla ....................................................................... 45 b. Análisis de los circuitos de prefalla y falla ................................................. 46 3.1.1.3. Estrategia de localización ....................................................................... 47 a. Cálculo de la distancia y la resistencia de falla .......................................... 48 b. Análisis del método para los diferentes tipos de falla ................................ 51 c. Definición del tipo de falla ......................................................................... 51 d. Valores sobre las ecuaciones para diferentes tipos de falla ........................ 52 e. Búsqueda de la sección en falla .................................................................. 53 3.1.1.4. Principales características del método MBM EJ1 .................................. 54 3.1.1.5. Descripción de la estructura de programación del MBM EJ1 ................ 55 3.1.1.6. Conclusiones del método ........................................................................ 55 3.1.2. Método de localización de fallas MBM EJ2 ....................................................... 56 3.1.2.1. Introducción ............................................................................................ 56 3.1.2.2. Fundamentación teórica del método ....................................................... 56 a. Circuito equivalente en prefalla.................................................................. 56 b. Circuito equivalente en falla ....................................................................... 57 c. Concentración de la carga .......................................................................... 59. 7.
(8) 3.1.2.3. a. b. c. d. e. f. 3.1.2.4. 3.1.2.5.. Estrategia de localización ....................................................................... 60 Análisis de los circuitos de prefalla y falla ................................................. 60 Cálculo de la distancia a la falla ................................................................. 61 Análisis del método para los diferentes tipos de falla ................................ 62 Definición del tipo de falla ......................................................................... 62 Valores sobre las ecuaciones para diferentes tipos de falla ........................ 63 Búsqueda de la sección en falla .................................................................. 63 Descripción de la estructura de programación del MBM EJ2 ................ 64 Conclusiones del método ........................................................................ 64. 3.2. Metodologías propuestas basadas en minería de datos (MBC) ................................. 66 3.2.1. Estrategia de regresión basada en MSV optimizada con el AG de CB (MBCr EJ1) ............................................................................................................................... 67 3.2.1.1. Fundamentación de la estrategia propuesta ............................................ 67 a. La regresión con MSV (MBCr) .................................................................. 67 b. Algoritmo genético (AG) en el MBCr EJ1................................................. 72 3.2.1.2. Explicación de la metodología y diseño algorítmico .............................. 73 3.2.2. Estrategia de regresión basada en k-NN optimizada con el AG de CB (MBCr EJ2) ............................................................................................................................... 82 3.2.2.1. Fundamentación de la estrategia propuesta ............................................ 82 a. La regresión con k-NN (MBCr) ................................................................. 83 i. Los k vecinos más cercanos .................................................................... 84 ii. La norma para el cálculo de la distancia entre datos .............................. 84 iii. La ponderación en el cálculo de la norma .............................................. 85 b. Algoritmo genético (AG) en el MBCr EJ2................................................. 87 3.2.2.2. Explicación de la metodología y diseño algorítmico .............................. 87 4.. APLICACIÓN DE LA TÉCNICA PROPUESTA ........................................................ 94 4.1. Requerimientos necesarios para la implementación.................................................. 94 4.2. Definición de las pruebas de validación .................................................................... 94 4.2.1. Información general de los métodos y de los registros de falla .......................... 95 4.2.2. Análisis de sensibilidad de los métodos ............................................................. 95 4.2.3. Errores para determinar la distancia de falla ...................................................... 96 4.3. Circuitos analizados y características de los mismos ................................................ 97. 8.
(9) 4.4. Aplicación de las metodologías propuestas basadas en la estimación de la impedancia........................................................................................................................ 97 4.4.1. Consideraciones de las pruebas con los MBM ................................................... 97 4.4.2. MBM EJ1 y MBM EJ2 sobre el sistema uno (1) ................................................ 98 4.4.2.1. Análisis de sensibilidad MBM EJ1 y MBM EJ2 sobre el sistema uno (1) . ................................................................................................................ 99 4.4.3. MBM EJ1 y MBM EJ2 sobre el sistema dos (2) .............................................. 102 4.4.3.1. Análisis de sensibilidad MBM EJ1 y MBM EJ2 sobre el sistema dos (2) . .............................................................................................................. 103 4.4.4. Descripción de los tiempos promedio de ejecución de los programas basados en los MBM (EJ1 y EJ2) ................................................................................................. 104 4.5. Aplicación de las metodologías propuestas basadas en minería de datos ............... 105 4.5.1. Consideraciones de las pruebas con los MBCr................................................. 106 4.5.2. Parametrización de los métodos: MBCr EJ1 y MBCr EJ2 sobre los sistemas de prueba.......................................................................................................................... 106 4.5.2.1. Especificaciones de las condiciones de parametrización ...................... 108 4.5.2.2. Parametrización del MBCr EJ1 sobre los sistemas de prueba .............. 108 a. Resumen de los mejores parámetros para el MBCr EJ1 .......................... 113 4.5.2.3. Parametrización del MBCr EJ2 sobre los sistemas de prueba .............. 114 a. Resumen de los mejores parámetros para el MBCr EJ2 .......................... 118 4.5.3. Entrenamiento de los métodos: MBCr EJ1 y MBCr EJ2 sobre los sistemas de prueba.......................................................................................................................... 119 4.5.4. Validación de los métodos: MBCr EJ1 y MBCr EJ2 sobre los sistemas de prueba .................................................................................................................................... 120 4.5.4.1. MBCr EJ1 y MBCr EJ2 sobre el sistema uno (1) ................................. 120 4.5.4.2. Análisis de sensibilidad MBCr EJ1 y MBCr EJ2 sobre el sistema uno (1) .............................................................................................................. 122 4.5.4.3. MBM EJ1 y MBM EJ2 sobre el sistema dos (2) .................................. 125 4.5.4.4. Análisis de sensibilidad MBCr EJ1 y MBCr EJ2 sobre el sistema dos (2) .............................................................................................................. 126 4.5.5. Descripción de los tiempos promedio de ejecución de los programas basados en los MBCr (EJ1 y EJ2) ................................................................................................. 128 4.5.5.1. Resumen de los tiempos de parametrización de los MBCr .................. 128 4.5.5.2. Resumen de los tiempos de entrenamiento del MBCr EJ1 ................... 128 4.5.5.3. Resumen de los tiempos de validación de los MBCr ........................... 129 4.5.6. Pruebas del MBCr EJ1 sobre el sistema uno (1), con las mismas resistencias de entrenamiento.............................................................................................................. 129 4.5.7. Pruebas del MBCr EJ2 sobre el sistema uno (1), comparación de resistencias de entrenamiento.............................................................................................................. 130 9.
(10) 5.. ANÁLISIS DE LOS RESULTADOS ........................................................................ 132 5.1. Selección del radial equivalente más largo ............................................................. 132 5.2. Análisis de los MBM ............................................................................................... 134 5.2.1. Análisis del MBM EJ1...................................................................................... 134 5.2.1.1. MBM EJ1 sobre los sistemas de prueba ............................................... 134 a. Variación de carga .................................................................................... 134 b. Variación de tensión en la fuente ............................................................. 134 c. Variación de resistividad .......................................................................... 134 d. Variación de la temperatura ..................................................................... 134 5.2.2. Análisis del MBM EJ2...................................................................................... 135 5.2.2.1. MBM EJ2 sobre los sistemas de prueba ............................................... 135 a. Variación de carga .................................................................................... 135 b. Variación de tensión en la fuente ............................................................. 135 c. Variación de resistividad .......................................................................... 135 d. Variación de la temperatura ..................................................................... 135 5.3. Análisis de los MBCr .............................................................................................. 136 5.3.1. Parametrización de los MBCr (EJ1 y EJ2) ....................................................... 136 5.3.1.1. Parametrización del MBCr EJ1 ............................................................ 138 5.3.1.2. Parametrización del MBCr EJ2 ............................................................ 138 5.3.1.3. Resumen de la parametrización de los MBCr ...................................... 139 5.3.2. Entrenamiento de los MBCr (EJ1).................................................................... 140 5.3.3. Validación de los MBCr (EJ1 y EJ2)................................................................ 140 5.3.4. Análisis del MBCr EJ1 ..................................................................................... 141 5.3.4.1. MBCr EJ1 sobre los sistemas de prueba ............................................... 141 a. Variación de carga .................................................................................... 141 b. Variación de tensión en la fuente ............................................................. 142 c. Variación de resistividad .......................................................................... 142 d. Variación de la temperatura ..................................................................... 142 5.3.5. Análisis del MBCr EJ2 ..................................................................................... 142 5.3.5.1. MBCr EJ2 sobre los sistemas de prueba ............................................... 142 a. Variación de carga .................................................................................... 142 b. Variación de tensión en la fuente ............................................................. 142 c. Variación de resistividad .......................................................................... 142 d. Variación de la temperatura ..................................................................... 142. 10.
(11) 5.4. Análisis de los tiempos de ejecución de los métodos sobre los sistemas de prueba 143 5.5. Análisis comparativo entre los MBM y los MBCr.................................................. 144 5.6. Análisis general de la técnica híbrida ...................................................................... 145 6.. CONCLUSIONES, RECOMENDACIONES Y TRABAJO FUTURO .................... 146 6.1. Conclusiones generales ........................................................................................... 146 6.2. Conclusiones de los MBM ...................................................................................... 147 6.3. Conclusiones de los MBCr ...................................................................................... 149 6.4. Recomendaciones .................................................................................................... 151 6.5. Trabajo futuro .......................................................................................................... 153. 7.. REFERENCIAS BIBLIOGRÁFICAS ....................................................................... 156. 8.. ANEXOS .................................................................................................................... 164. ANEXO A. Especificaciones de los sistemas de prueba ................................................... 164 ANEXO B. Estructura de programación del algoritmo genético de Chu-Beasley (AG de CB) ..................................................................................................................................... 186 ANEXO C. Puntos importantes sobre MSV ...................................................................... 190 ANEXO D. Estructura general de programación del software de localización de fallas .. 192 ANEXO E. Algunas gráficas de resultados de las pruebas ................................................ 197 ANEXO F. Requerimientos necesarios para la implementación de los localizadores propuestos en los sistemas de distribución reales .............................................................. 209. 11.
(12) ÍNDICE DE FIGURAS Pág. Figura 2.1. Modelo de un radial equivalente de la red ......................................................... 28 Figura 2.2. Modelo simplificado de un radial equivalente de la red, en una sección .......... 28 Figura 2.3. Simplificación del modelo de la red para una sección de un radial equivalente. .............................................................................................................................................. 29 Figura 2.4. Funciones de pérdida para regresión con MSV ................................................. 36 Figura 2.5. Parámetros usados en MSV para una dimensión ............................................... 37 Figura 3.1.Circuito equivalente serie del modelo para el MBM EJ1. .................................. 45 Figura 3.2.Circuito equivalente serie y paralelo del modelo para el MBM EJ1. ................. 45 Figura 3.3. Circuito equivalente serie del modelo con una falla para el MBM EJ1. ........... 46 Figura 3.4. Diagrama fasorial de impedancias. Ángulo de igual a cero.......................... 47 Figura 3.5. Diagrama fasorial de impedancias. Ángulo de diferente de cero. ................ 47 Figura 3.6. Circuito equivalente superpuesto para el MBM EJ1. ........................................ 47 Figura 3.7. Algoritmo para definir el tipo de falla en el MBM EJ1. .................................... 51 Figura 3.8. Diagrama de bloques de método de localización propuesto, MBM EJ1. .......... 55 Figura 3.9. Circuito equivalente serie del modelo para el MBM EJ2. ................................. 57 Figura 3.10. Circuito equivalente serie del modelo con una falla para el MBM EJ2. ......... 58 Figura 3.11. Diagrama de bloques para determinar el tipo de falla en el MBM EJ2. .......... 62 Figura 3.12. Diagrama de bloques de método de localización propuesto, MBM EJ2. ........ 65 Figura 3.13. Margen blando para una regresión con MSV lineal ........................................ 69 Figura 3.14. Parámetros para una regresión con MSV no lineal. ........................................ 72 Figura 3.15. Esquema del funcionamiento básico del AG de CB ........................................ 74 Figura 3.16. Fases de la estrategia de regresión basada en MSV. ....................................... 74 Figura 3.17. Estructura general de la fase de parametrización SVM ................................... 75 Figura 3.18. Validación cruzada para una base de datos con .................................... 78 Figura 3.19. Estrategia de regresión basada en MSV para cada tipo de falla. ..................... 80 Figura 3.20. Diseño algorítmico del MBCr EJ1 .................................................................. 81 Figura 3.21. Orden de una base de datos, para falla tipo monofásica. ................................. 86 Figura 3.22. Fases de la estrategia de regresión basada en k-NN. ....................................... 88 Figura 3.23. Estructura general de la fase de parametrización k-NN .................................. 89 Figura 3.24. Estrategia de regresión basada en k-NN para cada tipo de falla...................... 92 Figura 3.25. Diseño algorítmico del MBCr EJ2 .................................................................. 93 Figura 4.1. Diagrama de flujo de los requerimientos necesarios para la implementación de un localizador de fallas automático. ..................................................................................... 94 Figura 4.2. Error relativo y absoluto del MBM EJ1, para fallas monofásicas en el sistema radial equivalente 1 del sistema1, registros de falla a condición nominal. .......................... 98 12.
(13) Figura 4.3. Error relativo y absoluto del MBM EJ2, para fallas monofásicas en el sistema radial equivalente 1 del sistema1, registros de falla a condición nominal. .......................... 98 Figura 4.4. Error relativo y absoluto del MBM EJ1, para fallas monofásicas en el sistema radial equivalente 28 del sistema 2, registros de falla a condición nominal. ..................... 102 Figura 4.5. Error relativo y absoluto del MBM EJ2, para fallas monofásicas en el sistema radial equivalente 28 del sistema 2, registros de falla a condición nominal. ..................... 102 Figura 4.6 Funciones fitness para el proceso iterativo de la meta-heurística..................... 109 Figura 4.7. Error relativo y absoluto del MBCr EJ1, para fallas bifásicas a tierra en el sistema radial equivalente 1 del sistema 1, registros de falla a condición nominal. .......... 121 Figura 4.8. Error relativo y absoluto del MBCr EJ2, para fallas bifásicas a tierra en el sistema radial equivalente 1 del sistema 1, registros de falla a condición nominal. .......... 121 Figura 4.9. Error relativo y absoluto del MBCr EJ1, para fallas trifásicas en el sistema radial equivalente 28 del sistema 2, registros de falla a condición nominal. ..................... 125 Figura 4.10. Error relativo y absoluto del MBCr EJ2, para fallas trifásicas en el sistema radial equivalente 28 del sistema 2, registros de falla a condición nominal. ..................... 125 Figura 4.11. Error relativo y absoluto del MBCr EJ1, para fallas monofásicas en el sistema radial equivalente 1 del sistema 1, registros de falla a condición nominal. ....................... 130 Figura 4.12. Comparativo de gráficas de validación del MBCr EJ2, para fallas monofásicas, la primera con tres resistencias de falla en el “entrenamiento” y la segunda seis. ............ 131 Figura 5.1. Errores de estimación de falla para el sistema 1, sobre el radial número 1 ..... 133 Figura 5.2. Errores de estimación de falla para el sistema 1, sobre el radial número 3. .... 133. 13.
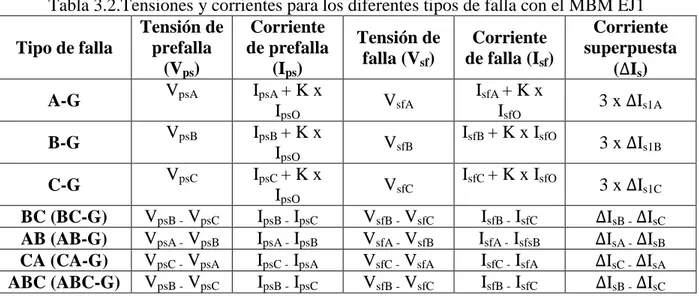
(14) ÍNDICE DE TABLAS Pág. Tabla 3.1. Determinación tipo de falla para el MBM EJ1 ................................................... 52 Tabla 3.2.Tensiones y corrientes para los diferentes tipos de falla con el MBM EJ1 ......... 52 Tabla 3.3. Tensiones y corrientes para los diferentes tipos de falla con el MBM EJ2. ....... 63 Tabla 3.4. Algunas funciones kernel normalmente aplicadas .............................................. 71 Tabla 3.5. Algunas formas para determinar la distancia entre dos vectores. ....................... 85 Tabla 3.6. Formas relevantes para ponderar la estimación con k-NN. ................................ 85 Tabla 4.1. Resumen de los errores absolutos de los MBM, para la condición nominal o promedio del sistema 1......................................................................................................... 99 Tabla 4.2. Resumen de los errores absolutos de los MBM, para el escenario de variación de carga del sistema 1 ............................................................................................................... 99 Tabla 4.3. Resumen de los errores absolutos de los MBM, para el escenario de variación de tensión del sistema 1 .......................................................................................................... 100 Tabla 4.4. Resumen de los errores absolutos de los MBM, para el escenario de variación de resistividad del terreno del sistema 1 ................................................................................. 100 Tabla 4.5. Resumen de los errores absolutos de los MBM, para el escenario de variación de temperatura del conductor del sistema 1 ............................................................................ 101 Tabla 4.6. Resumen de los errores absolutos de los MBM, para la condición nominal o promedio del sistema 2....................................................................................................... 103 Tabla 4.7. Resumen de los errores absolutos de los MBM, para el escenario de variación de carga del sistema 2 ............................................................................................................. 103 Tabla 4.8. Resumen de los errores absolutos de los MBM, para el escenario de variación de tensión del sistema 2 .......................................................................................................... 104 Tabla 4.9. Resumen de los tiempos para construir cada gráfica de errores absolutos y relativos de los MBM, para los diferentes escenarios sobre los sistemas. ......................... 105 Tabla 4.10. Posibles combinaciones de los descriptores de falla para conformar un registro: . ......................................................................................................................... 108 Tabla 4.11 Resultado de la parametrización del MBCr EJ1 para falla monofásica, sobre los sistemas de prueba.............................................................................................................. 110 Tabla 4.12 Resultado de la parametrización del MBCr EJ1 para falla bifásica, sobre los sistemas de prueba.............................................................................................................. 111 Tabla 4.13 Resultado de la parametrización del MBCr EJ1 para falla trifásica, sobre los sistemas de prueba.............................................................................................................. 112 Tabla 4.14. Resultado de la parametrización del MBCr EJ1 para el sistema 1 ................. 113 Tabla 4.15. Resultado de la parametrización del MBCr EJ1 para el sistema 2 ................. 113 Tabla 4.16 Resultado de la parametrización del MBCr EJ2 para falla monofásica, sobre los sistemas de prueba con la técnica meta-heurística. ............................................................ 114. 14.
(15) Tabla 4.17 Resultado de la parametrización del MBCr EJ2 para falla bifásica, sobre los sistemas de prueba, basada en la técnica meta-heurística. ................................................. 115 Tabla 4.18 Resultado de la parametrización del MBCr EJ2 para falla trifásica, sobre los sistemas de prueba, basada en la técnica meta-heurística. ................................................. 116 Tabla 4.19 Comparación de tiempos de ejecución del MBCr EJ2 sobre el sistema 1 con la técnica meta-heurística, frente a la solución determinística restringida a un intervalo de vecinos................................................................................................................................ 117 Tabla 4.20 Comparación de tiempos de ejecución del MBCr EJ2 sobre el sistema 2 con la técnica meta-heurística, frente a la solución determinística restringida a un intervalo de vecinos................................................................................................................................ 117 Tabla 4.21. Resultado de la parametrización del MBCr EJ2 para el sistema 1 ................. 118 Tabla 4.22. Resultado de la parametrización del MBCr EJ2 para el sistema 2 ................. 118 Tabla 4.23. Resumen de los tiempos de entrenamiento para el MBCr EJ1. ...................... 119 Tabla 4.24. Resumen de los errores absolutos de los MBCr, para la condición nominal o promedio del sistema 1....................................................................................................... 122 Tabla 4.25. Resumen de los errores absolutos de los MBCr, para el escenario de variación de carga del sistema 1 ........................................................................................................ 122 Tabla 4.26. Resumen de los errores absolutos de los MBCr, para el escenario de variación de tensión del sistema 1...................................................................................................... 123 Tabla 4.27. Resumen de los errores absolutos de los MBCr, para el escenario de variación de resistividad del terreno del sistema 1 ............................................................................ 123 Tabla 4.28. Resumen de los errores absolutos de los MBCr, para el escenario de variación de temperatura del conductor del sistema 1 ....................................................................... 124 Tabla 4.29. Resumen de los errores absolutos de los MBCr, para la condición nominal o promedio del sistema 2....................................................................................................... 126 Tabla 4.30. Resumen de los errores absolutos de los MBCr, para el escenario de variación de carga del sistema 2 ........................................................................................................ 126 Tabla 4.31. Resumen de los errores absolutos de los MBCr, para el escenario de variación de tensión del sistema 2...................................................................................................... 127 Tabla 4.32. Resumen de los tiempos de parametrización para los MBCr ......................... 128 Tabla 4.33. Resumen de los tiempos de entrenamiento para el MBCr EJ1. ...................... 128 Tabla 4.34. Resumen de los tiempos para construir cada gráfica de errores absolutos y relativos de los MBCr, para los diferentes escenarios sobre los sistemas. ........................ 129 Tabla 5.1. Resumen de la mejor a la peor combinación de descriptores para los MBCr, sobre los sistema en estudio ............................................................................................... 136 Tabla 5.2. Resumen de los tiempos para estimar una falla con los MBCr. ....................... 144 Tabla 5.3. Resumen de los tiempos para estimar una falla con los MBM. ........................ 144. 15.
(16) ÍNDICE DE ANEXOS Pág. ANEXO A. Especificaciones de los sistemas de prueba ................................................... 164 ANEXO B. Estructura de programación del algoritmo genético de Chu-Beasley (AG de CB) ..................................................................................................................................... 186 ANEXO C. Puntos importantes sobre MSV ...................................................................... 190 ANEXO D. Estructura general de programación del software de localización de fallas .. 192 ANEXO E. Algunas gráficas de resultados de las pruebas ................................................ 197 ANEXO F. Requerimientos necesarios para la implementación de los localizadores propuestos en los sistemas de distribución reales .............................................................. 209. 16.
(17) 1. INTRODUCCIÓN. 1.1. Motivación Por mucho tiempo, la energía eléctrica ha sido un recurso fundamental para el desarrollo económico y social de una población, ya que determina en gran medida los niveles de productividad, las posibilidades de desarrollo agroindustrial y la calidad de vida de los habitantes. Por lo tanto, los sistemas eléctricos de potencia que son la fuente principal de abastecimiento de energía eléctrica, se convierten en uno de los responsables en este desarrollo [MORA, 2005]. La energía eléctrica se evalúa constantemente con su calidad y es tema de estudio de gran interés para los operadores de los sistemas eléctricos y para los usuarios, por lo cual la actividad investigativa en este campo ha experimentado un avance significativo en las últimas décadas [AGGA, 1997], [NOVO, 1998], [DAS, 1998], [MORA, 2005a], [ESPA, 2009]. Dentro de los aspectos más importantes en la calidad de energía eléctrica se tienen en cuenta la forma de onda, la continuidad del servicio y la atención al cliente [MORA, 2006]. Por otro lado, el crecimiento de los sistemas eléctricos de potencia, tanto en el número de líneas en operación como en su longitud total, genera una dificultad para el sector eléctrico, sobre todo cuando las líneas experimentan fallas causadas principalmente por tormentas, descargas atmosféricas, ruptura del aislamiento y corto circuitos debidos a crecimiento de la vegetación u otros objetos externos. La investigación de este proyecto está directamente relacionada con el mejoramiento en la continuidad del servicio y ésta a la vez con las perturbaciones indeseadas sobre el sistema eléctrico de potencia. En Colombia, existen dos indicadores de discontinuidad del servicio completamente avalados (Resolución de la CREG No. 097 de 2008, pág. 106) [CREG, 2008]: a) el índice de referencia de la calidad de cada operador de red (OR) denominado Índice de Referencia Agrupado de la Discontinuidad (IRAD) y b) el índice de calidad del servicio prestado durante un trimestre, denominado Índice Trimestral Agrupado de la Discontinuidad (ITAD). Con estos índices se determinan las mejoras o desmejoras en la calidad del servicio prestado por cada OR. Las interrupciones indeseadas significan pérdidas de dinero básicamente por dos razones: la primera por pérdidas a nivel industrial (tiempo de no operación o suspensión de procesos, pérdidas de información e insumos, daño en maquinarias, etc.) y la segunda por compensaciones impuestas a empresas de energía eléctrica por incumplimiento de las regulaciones establecidas (sobrepaso de los índices) [CREG, 2008]. De igual forma, la determinación de índices facilita el establecimiento de límites por parte de las entidades. 17.
(18) reguladoras, de tal forma que los operadores de red y los usuarios están obligados a satisfacerlos para evitar pagar compensaciones por su incumplimiento. El suministro de energía a los usuarios finales, se realiza por el sistema de distribución y la idea del operador de la red es disminuir al mínimo tendiendo a cero las interrupciones del servicio, ya que, una interrupción causa pérdidas económicas como se ha dicho y desde cualquier punto de vista presenta una disminución de la calidad del servicio [MORA, 2005a]. De acuerdo a estudios [DAS, 1998], la principal fuente de interrupciones en el servicio de energía eléctrica se presenta en las redes de distribución y a pesar de que sea muy confiable, en algunos casos es inevitable que se presente una falla sobre las líneas, ya que están expuestas a condiciones ambientales difíciles de predecir como tormentas, vientos fuertes, vegetación y animales que rodean el entorno de las líneas y otras causas como fallas en los equipos de aislamiento, accidentes automovilísticos, entre otros [MORA, 2006]. Para reparar un sistema de distribución, lo primordial es ubicar la falla que causó el comportamiento inadecuado de la red, para luego ejecutar obras de restauración del servicio en el menor tiempo posible y de esta manera, mejorar la continuidad del servicio. La rápida localización de fallas permanentes, permitirá disminuir la duración de las interrupciones, mientras que la continua monitorización y localización de fallas (permanentes y transitorias), permite determinar las debilidades del sistema, y de esa forma fortalecer la red para que la ocurrencia de fallas sea cada vez menor [MORA, 2006].. 1.2. El problema de localización de fallas en sistemas de potencia Una falla en el sistema eléctrico se puede localizar visualmente, pero normalmente toma mucho tiempo y depende del número de personas calificadas que estén en el proceso, además de esto, una falla se puede detectar visualmente cuando es permanente, pero en el caso de que sea transitoria la complejidad de localizarla se incrementa. Usualmente una falla transitoria no causa mucha perturbación en la red, pero genera preocupación en ella ya que evidencia un punto frágil que podría causar daños mayores posteriormente, de aquí la necesidad de estrategias que permitan identificar zonas débiles para realizar prácticas de mantenimiento preventivo y así evitar interrupciones permanentes [ANDE, 1995]. Cuando ocurre una falla, los procesos de identificación y localización son fundamentales, ya que esto facilita una pronta rehabilitación del servicio. Por otro lado, las empresas suministradoras del servicio eléctrico están interesadas en mantener sus índices de continuidad, especialmente preocupadas por conservar la confianza de sus clientes, así como para cumplir las reglamentaciones impuestas por el ente regulador (CREG para el caso colombiano) [CREG, 2008]. Por ello, el estudio de la calidad y continuidad del suministro de energía eléctrica ha tomado mucho impacto y dentro de esta temática, el problema de la localización de fallas se ubica como uno de los más importantes. 18.
(19) Adicionalmente, y como consecuencia de las acciones operativas posteriores a la localización de la falla (conmutación de seccionalizadores), es posible reducir el área afectada y restablecer prontamente zonas aledañas, sin que la pérdida transitoria del servicio alcance a ser contabilizada como interrupción [ROJA, 2004]. 1.2.1. Fallas en sistemas de potencia La localización de fallas en sistemas de potencia no es algo nuevo. Las primeras exploraciones sobre el tema se enfocaron en la localización de fallas en líneas de transmisión, mediante la utilización de las medidas tomadas en ambos extremos de una línea normalmente homogénea. En los últimos años e incentivados por la nueva estructura competitiva del mercado eléctrico, se han incentivado en gran medida los estudios relacionados con la localización del sitio de falla en sistemas de distribución, donde el problema es más complejo [SANC, 2007]. 1.2.2. Sistemas de transmisión Para el caso de los sistemas de transmisión, el problema es relativamente sencillo debido a la disponibilidad de sofisticados equipos de medición en las subestaciones de inicio y finalización de la línea, las características como la homogeneidad y la ausencia de cargas intermedias entre las subestaciones de transmisión. Sin embargo, el problema no está totalmente resuelto para fallas de alta impedancia o para fallas evolutivas. Para este último caso, debido al cambio en las condiciones de la falla, los algoritmos de estimación disponibles pueden tener errores considerables [IEEE, 2004]. 1.2.3. Sistemas de distribución Los principales inconvenientes en la identificación y localización de fallas en redes eléctricas están relacionados con aspectos de infraestructura. Los sistemas de distribución, por ejemplo, no disponen de estimadores de fallas dedicados en cada uno de sus circuitos, aún más, en subestaciones de distribución sólo existen equipos enfocados a la monitorización del comportamiento global de las mismas. De otra parte, la configuración de sus redes no es homogénea [NOVO, 1998], ya que generalmente contienen diferentes secciones de conductor y presentan múltiples derivaciones de cargas a lo largo de cada circuito alimentador [SANC, 2007]. Debido a lo anterior, la atención a fallas en los sistemas de distribución puede volverse ineficiente por parte de los operadores de red y las empresas distribuidoras, al no contar con sistemas que permitan una rápida identificación y localización de las mismas. La estimación de la distancia a las fallas en redes de distribución es un problema de mayor complejidad debido a que estos sistemas pueden estar desbalanceados, tener una topología radial con muchas ramificaciones o laterales monofásicos, cargas intermedias, y conductores de diferentes calibres. Adicionalmente, debido a la gran cantidad de subestaciones de distribución y la comparativamente baja potencia que alimentan, estos sistemas cuentan con muy poca instrumentación. En el mejor de los casos, se limita a medidores de tensión y corriente, algunas protecciones como relés 50/51 en la subestación,. 19.
(20) y elementos propios de automatización como reconectadores, seccionalizadores y fusibles ubicados a lo largo del sistema [PERE, 2010].. 1.3. Métodos usados para localización de fallas en redes de distribución Los métodos algorítmicos son los más utilizados en las empresas de energía debido a su fácil implementación. Estos métodos utilizan el modelo circuital del sistema, así como los valores de la componente fundamental de tensión y corriente de pre-falla y falla. Tienen una alta precisión, pero se ven afectados por las características no homogéneas de las redes, la alta ramificación de los circuitos y la existencia de cargas a lo largo de las mismas; adicionalmente presentan problemas de múltiple estimación [MORA, 2006]. Por otro lado, los primeros métodos utilizados para la localización de fallas, consisten en una inspección visual de los circuitos en falla reportados por los clientes. Otros métodos implementados posteriormente, dada la poca practicidad de los anteriores, utilizan las medidas de tensión y corriente en ambos o en un extremo de la línea. Estos últimos métodos se dividen en tres categorías: métodos basados en ondas viajeras, métodos que usan componentes de alta frecuencia y métodos que usan el valor de la componente fundamental de tensión y corriente o mejor conocidos como métodos basados en la impedancia o el modelo (MBM) [DAS, 1995]. Los de esta última categoría se pueden clasificar también como métodos que usan medidas en un terminal de la línea [AGGA, 1997] y los que usan medidas en ambos terminales. A parte de estos métodos, existen otros que no utilizan el análisis circuital, se fundamentan en el análisis de un conjunto de características obtenidas de la componente fundamental de la señal de tensión y corriente medidas en la subestación y son conocidos como métodos basados en el conocimiento (MBC) [ESPA, 2008].. 1.3.1. Los MBM Los métodos basados en la estimación de la impedancia (MBM) utilizan los parámetros de modelo del sistema y los valores eficaces del fundamental de tensión y corriente de prefalla y falla para calcular la distancia entre el punto de medida (normalmente la subestación) y el sitio de falla. Debido a este aspecto y a la topología radial altamente ramificada en un sistema de distribución, esta distancia puede coincidir en varios sitios del sistema y por tanto, estos métodos tienen el problema de la múltiple estimación del sitio de falla en el caso específico de los sistemas de distribución [CHOI, 2004]. Adicionalmente, la exactitud de la distancia estimada es altamente dependiente de un buen modelo del sistema [ESPA, 2007]. La complejidad en el análisis de un sistema de distribución radica en que éste presenta conductores no homogéneos, cargas o ramificaciones laterales, en algunos casos desconocimiento del tipo de carga en cada barra, hay desbalance del sistema y de la carga, entre otros [NOVO, 1998]. Generalmente, se cuenta con medidas únicamente en la. 20.
(21) subestación, por lo que hace dependiente del análisis la utilización de todo lo que se pueda medir en la subestación (variaciones de tensión, corriente, potencia, etc.). 1.3.1.1. Efecto de la resistencia de falla En los sistemas de distribución bajo fallas y como consecuencia de la resistencia de falla, se presenta que la impedancia aparente vista desde la subestación es mayor a la impedancia de la línea desde la subestación hasta la falla [CAIC, 2007]. De tal manera que, el efecto de la resistencia de falla sobre un análisis circuital, genera que se pueda aproximar la reactancia vista desde la subestación y la reactancia de la línea hasta el punto de falla, adicionalmente esto se favorece con la consideración de impedancia de falla totalmente resistiva. 1.3.1.2. Efecto de las cargas intermedias En los métodos basados en el modelo, las cargas intermedias causan problemas con la exactitud de la distancia, debido a que la corriente medida en la subestación, no corresponde a la corriente de falla sino a la suma de esta con las corrientes de las cargas intermedias que se derivan antes de la falla [IEEE, 2004], [MORA, 2006c].Las corrientes de cargas intermedias no siempre son fáciles de encontrar, si no se cuenta con un modelo adecuado que las represente muy bien. Además, la falta de información sobre esas cargas genera incertidumbre [VARG, 2007].. 1.3.2. Los MBC Los métodos de localización de fallas basados en el conocimiento (MBC), se fundamentan en el análisis de un conjunto de características obtenidas de la componente fundamental de la señal de tensión y corriente medidas en la subestación. Estas características se asocian a una serie de eventos de fallas ocurridos en diferentes lugares del circuito. Este tipo de métodos consideran una gran cantidad de variables para llevar a cabo su objetivo, lo que convierte su implementación en una tarea de difícil manejo, no solamente por la cantidad de información sino por la redundancia que puede existir entre ella. Para disminuir esta dificultad, se realiza un tratamiento previo de las variables, para establecer un conjunto de menor dimensión y que proporcione la mayor información del comportamiento del circuito [MORA, 2006a], [MORA, 2006b], [GOME, 2006], [PERE, 2007]. Existen diversas técnicas orientadas a localizar la falla, pero en general centran su esfuerzo en obtener aquellas variables que describan totalmente el comportamiento del sistema bajo falla. La implementación de estos métodos no conduce a una alta inversión, pero demanda un alto nivel de programación y un conocimiento pleno de las características principales del sistema [MORA, 2006]. Los métodos de localización que basan su análisis en los MBC requieren caracterizar los datos de entrada, con el fin de aprovechar el conocimiento empírico disponible en la información registrada [MORA, 2005a]. Los métodos de regresión basados en MBC, utilizan una base de datos conformada por registros de falla asociados a su localización o distancia a la falla. Luego, con esa información se puede encontrar una curva n-dimensional que represente los datos, para. 21.
(22) luego permitir obtener a través de registros nuevos sin localización, una estimación o regresión de la falla. Para obtener una representación muy aproximada con el MBC, se necesita una base de datos bien constituida por registros de falla en un circuito, en los que incluya variaciones en la resistencia de falla, variaciones de carga en el sistema, variaciones de los parámetros de las líneas, entre otros. Esto genera un error aceptable en la predicción de distancias a la falla o en la regresión como tal. En consecuencia, el efecto de la resistencia de falla, el de cargas intermedias o el de otra variable que pueda afectar la localización, está directamente relacionado con la base de registros de falla. Entre más información sobre registros de falla se tengan, mejor será la caracterización de la curva de regresión.. 1.4. Objetivos de la investigación Para el cumplimiento de esta investigación, se trazó un objetivo general y nueve objetivos específicos. Objetivo General El objetivo general de este trabajo de grado es desarrollar una estrategia que permita mejorar la estimación de la distancia a la falla utilizando métodos de localización basados en el análisis circuital y de información de cambios en las medidas de tensión y corriente..De esta manera, se pretende mejorar los índices de continuidad del servicio de energía eléctrica en sistemas de distribución. Objetivos específicos a. Estudiar y proponer alternativas de complementación de métodos basados en la estimación de la distancia utilizando el modelo de la red, para alcanzar un mejor desempeño en la localización de fallas en redes de distribución. b. Desarrollar dos estrategias de estimación de distancia a la falla basado en el modelo (MBM). c. Estudiar y proponer alternativas de complementación de métodos basados en el conocimiento (minería de datos) para regresión (MBCr). d. Desarrollar dos estrategias de estimación de la distancia a la falla basadas en minería de datos (MBCr). e. Desarrollar una estrategia para validación de los algoritmos de localización de fallas propuestos a partir del análisis de sensibilidad que considere variaciones en la resistencia de falla, carga del circuito, parámetros de las líneas y equivalente de Thévenin en la subestación. f.. Analizar comparativamente el comportamiento de los MBM y los MBC.. 22.
(23) g.. Analizar el comportamiento de los métodos en un circuito de distribución.. h. Determinar los requerimientos necesarios para la implementación de los estimadores propuestos en los sistemas de distribución. i.. Implementar un localizador de falla.. 1.5. Definición y acotamiento del problema La mayoría de las empresas de servicios públicos de distribución de energía han instalado registradores de eventos, pero han sido insuficientes para las estrategias automáticas de manejo de esta información, con el fin de obtener un modelo eficaz para el proceso de apoyo a la toma de decisiones. Entonces, la mayoría de la información almacenada no se utiliza y el proceso de mejoramiento no es eficaz. Lo descrito anteriormente es una consecuencia directa del elevado costo de las alternativas comerciales disponibles, y la base de datos reducida de la información obtenida de registros de fallas y relés [BURT, 1995], [CHIN, 2007], [AZEV, 2007]. Esta investigación está orientada a utilizar toda la información en bases de datos de fallas, que contienen los registros de fallas: las corrientes y tensiones medidas en la subestación (antes y durante la falla) y la ubicación. Mediante el uso de esa información contenida en tales registros de fallas es posible determinar la ubicación de una nueva falla, como se propondrá con los MBCr. Además de esto, existen métodos que sólo utilizan la información de los parámetros del circuito y luego con un registro de una falla nueva, se determina la estimación de la distancia a la falla, haciendo un análisis circuital como se mostrará con los MBM. En la actualidad, existen diferentes referencias bibliográficas sobre algoritmos que permiten la localización de fallas en sistemas de distribución basados en el modelo [GIRG, 1993], [DAS, 1995], [ESPA, 2007], [NOVO, 1998], [CORT, 2005], pero un inconveniente es que presentan incertidumbre a la hora de ir a su aplicación. La implementación en un sistema de distribución manejando el circuito equivalente puede ser muy compleja, llegando al punto de no encontrar buenos resultados, sin embargo, si la técnica se ajusta adecuadamente y se complementa con otras estrategias, entonces los resultados pueden mejorar. La mayoría de estos métodos han sido desarrollados partiendo del análisis de un sistema de transmisión, por lo tanto, ignoran características importantes propias de los sistemas de distribución. Por otro lado, hoy por hoy en las subestaciones principales de distribución, se tienen dispositivos de protección y de medida digital que detectan que ha ocurrido una anormalidad en la red (falla), algunos son tan sofisticados que tienen la capacidad de almacenar la forma de onda de las señales de tensión y corriente en la subestación, con la información de las variaciones ocasionadas por la perturbación. De esta manera, se puede utilizar la información de bases de datos de registros de falla con su respectiva localización, o simplemente obtenerla de la simulación de un circuito real modelado.. 23.
(24) Este proyecto de investigación está relacionado con la localización de fallas paralelas en sistemas de distribución rígidamente puestos a tierra, orientado al análisis y la propuesta de una solución utilizando medidas en un solo terminal de la línea, que en este caso corresponde a la subestación de distribución. De esta manera, la pregunta de investigación está asociada a cómo determinar o estimar la distancia a la falla y reducir el tiempo de estimación con medidas de un solo terminal de la línea y cómo asociar la pronta localización con el mejoramiento de los índices de continuidad del suministro (IRAD e ITAD). La justificación se da por la necesidad actual de las empresas del sector eléctrico colombiano-SEC, en mantener y mejorar sus índices. Como aporte del proyecto de investigación, para la solución del problema se propone el uso de la información proveniente de las medidas de tensión y de corriente mediante métodos de estimación de la distancia a la falla. Adicionalmente, se plantean dos sistemas de distribución para el desarrollo de las pruebas de los algoritmos desarrollados. Finalmente, se propone determinar los requerimientos necesarios para la implementación física de los estimadores. El problema de localización de fallas en sistemas de distribución es un problema complejo y aún no está resuelto. Se plantea con este proyecto, resolver el problema a partir de la pronta estimación de la distancia a la falla. Como visión de aporte a su solución, se planea complementar los métodos clásicos de estimación basados en el análisis circuital del modelo con técnicas de regresión basadas en el conocimiento, para finalmente comparar las respuestas de un MBM respecto a un MBC y definir concretamente la respuesta de cada uno. El estudio se realiza de manera independiente, en donde se definen dos MBM partiendo de la definición de las estrategias originales por los autores y dos MBC orientados al desarrollo de un método híbrido que combina una técnica de regresión y una técnica de optimización como el algoritmo genético de Chu Beasley para resolver el problema de la localización de fallas.. 1.6. Definición del sistema de pruebas prototipo Las estrategias propuestas se prueban y validan utilizando dos circuitos diferentes, pero cada uno con una característica especial. Uno de los circuitos es poco ramificado con un alimentador principal largo (sistema 1) y el otro tiene muchas ramificaciones con distancias relativamente cortas entre nodos o postes del sistema (sistema 2). Cada sistema es modelado para posteriormente simular fallas sobre el. Para probar los MBM no se requiere un entrenamiento previo, sólo es necesario tener la información básica del circuito y luego con el registro de falla (o los registros) se estima la distancia a la falla, este proceso se denomina: validación. Mientras tanto, para el MBC se deben realizar tres fases: parametrización, entrenamiento y validación. En las primeras dos fases se calibra el MBC siguiendo un procedimiento óptimo, luego, en la última fase se 24.
(25) obtiene la validación o pruebas de los métodos. En el anexo A, se muestran las características de los dos sistemas de distribución utilizados en las pruebas de los métodos de localización de fallas MBM EJ1, MBM EJ2, MBCr EJ1 y MBCr EJ2.. 1.7. Resultados y aportes de la tesis El trabajo realizado ha permitido el desarrollo de algoritmos de localización de fallas implementados en MatLab®, que pueden ser aplicados a un sistema de distribución real e incluidos como parte del sistema de distribución. La estrategia planteada se fundamenta en cuatro técnicas de estimación de la distancia a la falla. Dos metodologías de localización de fallas que utilizan la teoría de análisis de circuitos o MBM, y dos técnicas que utilizan la información obtenida de la explotación de bases de datos o MBC, cada una de ellas estima la distancia al lugar donde ocurrió la falla. Los resultados son altamente satisfactorios, ya que la implementación de los MBCr no es popular, respecto a las referencias bibliográficas existentes. Por otro lado, la respuesta respecto a la de los MBM no tiene una diferencia significativa. Como aportes importantes de este trabajo se tienen: Análisis de la fundamentación matemática básica de dos métodos basados en el modelo (MBM). Análisis de la fundamentación matemática básica de dos métodos basados en minería de datos (MBC). Acoplamiento de una técnica meta-heurística para la selección de los mejores parámetros de un MBC. Aplicación de las máquinas de soporte vectorial (MSV) para regresión como núcleo principal de la función de localización de fallas del MBCr EJ1 (primer método basado en el conocimiento para regresión). Aplicación de los k vecinos más cercanos (kNN) para regresión como núcleo principal de la función de localización de fallas del MBCr EJ2 (segundo método basado en el conocimiento para regresión). Implementación de cuatro técnicas de estimación de la distancia en MatLab®. Adaptación y mejoramiento de una herramienta que permite realizar la estimación de eventos de falla para sistemas de distribución basado en MatLab®. Requerimientos básicos, necesarios para la aplicación de las estrategias en un sistema de distribución real. Validación de las metodologías ante diferentes variaciones del circuito: carga, tensión de la fuente, resistividad sobre el circuito, temperatura, entre otros. Pruebas y análisis de sensibilidad de las estrategias de estimación, mostrando su buen desempeño en dos sistemas de prueba de gran escala. Con estas técnicas, se determina la distancia más probable de ubicación de la falla en sistemas de distribución y su implementación es económicamente viable para los operadores de red, con el objeto de disminuir el tiempo de atención a fallas. 25.
(26) 1.8. Estructura del documento El documento está dividido en siete capítulos. El capítulo inicial corresponde a la introducción, en la se presenta de manera formal la tesis y se discuten brevemente los principales aspectos. En el capítulo dos se presentan los aspectos teóricos fundamentales asociados al trabajo, se discute lo más relevante de las técnicas, para luego entrar a justificar la necesidad de incluir una propuesta híbrida respecto a los MBC. Este capítulo se divide en dos secciones, la primera en los aspectos teóricos asociados a dos técnicas de estimación de la distancia a la falla basadas en MBM y la segunda los asociados a dos técnicas de regresión fundamentadas en MBCr. En el capítulo tres se presenta la metodología de las técnicas propuestas, en donde inicialmente se plantean las características básicas de los métodos para luego presentar la estructura final de programación. Así como el capítulo dos, este capítulo se divide en dos partes, la primera es la exposición de las dos metodologías propuestas basadas en MBM y la segunda en las dos metodologías propuestas asociadas a los MBCr. La aplicación de la metodología propuesta se estructura en el capítulo cuatro, donde se definen inicialmente la pruebas de validación, luego los dos circuitos analizados con las características de los mismos y finalmente la aplicación de las cuatro estrategias de estimación de la distancia, mediante varias pruebas de validación para la localización de fallas en sistemas de distribución típicos, simulados en EMTP/ATP [ATP, 2002]. El capítulo cinco contiene el análisis de los resultados obtenidos con las pruebas del capítulo cuatro, se comprueba la efectividad de la función de localización de fallas, así como el conjunto de etapas que contiene la estructura de software propuesto. En el capítulo seis, se presentan las conclusiones y recomendaciones del trabajo, así como las propuestas de trabajos futuros que se derivan de él (en el área de hardware, software, e inteligencia artificial), haciendo énfasis en los aportes de la tesis. Finalmente, se presentan las referencias bibliográficas en el último capítulo y los seis anexos. El anexo A, muestra las especificaciones de los sistemas de prueba. En el anexo B, se presenta la estructura de programación del algoritmo genético de Chu Beasley (AG de CB). El anexo C muestra algunos puntos importantes sobre MSV, el anexo D, describe de manera general la estructura de programación del software de localización de fallas, el anexo E, especifica algunas gráficas de resultados de las pruebas y por último, en el anexo F, se definen los requerimientos necesarios para la implementación de los localizadores propuestos en sistemas de distribución reales.. 26.
(27) 2. ASPECTOS TEÓRICOS. 2.1. Métodos basados en la estimación de la impedancia 2.1.1. Sistemas de distribución Se entiende por sistema de distribución de energía eléctrica a la disposición adoptada por los conductores o líneas, transformadores, consumidores y demás elementos del sistema, para lograr que la energía generada en las centrales pueda ser utilizada en los sitios de consumo. El sistema de distribución tiene como objetivo recibir la energía eléctrica que llega desde los grandes centros de generación a través del sistema de potencia y distribuirla a los diferentes usuarios a niveles de tensión adecuados. La operación de los sistemas de distribución debe realizarse bajo parámetros de eficiencia, calidad y confiabilidad de tal manera que las empresas de distribución sean financieramente viables [CEAS, 1997], [VILL, 2006]; por tal motivo han sido desarrolladas técnicas de solución con el fin de reducir las pérdidas y aumentar la eficiencia operativa y financiera. Los sistemas de distribución presentan características particulares que los diferencian de los sistemas de transmisión, entre ellas se destacan: Radialidad: el sistema de distribución es operado de forma radial evitando la necesidad de sofisticados sistemas de adquisición de datos (SCADA). Así mismo, la topología radial reduce las corrientes de cortocircuito y la cantidad de documentación descriptiva. Relación R/X: a diferencia de los sistemas de potencia, las líneas de distribución presentan valores cercanos entre la resistencia y la reactancia serie [GRAI, 1996]. Esta relación varía según los tipos de conductores utilizados y la disposición geométrica de los mismos, en algunos casos R y X tienen valores cercanos mientras que en otros el primero puede ser mucho mayor al segundo. Transposición: las líneas de distribución son de corta longitud y bajo nivel de tensión, por ello son construidas sin requerir de transposición. Por tal motivo un modelo adecuado debe realizarse en forma trifásica [STEV, 1976]. Multiplicidad de las cargas: existen una variedad de cargas conectadas de forma trifásica o monofásica las cuales pueden ser modeladas como impedancia, corriente o potencia constante. Desbalance: debido a la presencia de cargas monofásicas y elementos diseñados asimétricamente, el sistema de distribución es desbalanceado. Esto implica un modelamiento trifásico de todos los componentes imposibilitando la utilización de equivalentes monofásicos tal y como se hace en sistemas de potencia. Tamaño: los sistemas de distribución presentan gran cantidad de nodos [KERS, 2002], por ende, se requiere un adecuado manejo de la información. Así mismo, el sistema de distribución crece mucho más rápidamente que el sistema de transmisión y generación. Incertidumbre: la falta de bases de datos de manejo de carga hace más difícil el análisis a mediano y corto plazo [GONE, 1990]. Debido a las características de los sistemas de distribución el modelo matemático de la red debe cumplir con una serie de requisitos técnicos o restricciones a saber: configuración 27.
(28) radial, abastecimiento de la demanda, límites de capacidad de líneas y transformadores, límites máximos y mínimos de tensiones nodales, la reconfiguración es planteada con el fin de optimizar la topología de los alimentadores primarios en una subestación o bien para un conjunto de alimentadores conectados a distintas subestaciones. En cualquier caso, el modelamiento es similar y las subestaciones se convierten el nodo slack equivalente [KERS. 2002].. 2.1.1.1. Estimación de la distancia a la falla en sistemas de distribución Las técnicas clásicas de estimación de distancia a fallas se han venido utilizando de manera paulatina y eficiente, considerando que la implementación requiere de un análisis circuital y de un conocimiento previo de los circuitos a analizar, es bueno tener en cuenta que existen diferentes autores de referencias bibliográficas [AGGA, 1997], [CHOI, 2004], [DAS, 1995], [NOVO, 1998], [SALI, 2009], que de una u otra manera han tenido que considerar algunas aproximaciones en los análisis de los modelos. En la localización de fallas en sistemas de distribución a través de técnicas dependientes del modelo, un factor clave es el correcto modelado del sistema. Esto porque un ineficiente modelado puede influir de manera significativa en la precisión del localizador. Considerando la complejidad en el análisis de un sistema de distribución y algunas de las características más importantes, se puede definir el modelo de un radial equivalente de la red a partir de un circuito complejo como el que se muestra en la Figura 2.1, o también otro más simplificado (Figura 2.2), que representa a la red en su contexto global [REST, 2008]. M. R. Z( M , R ). S/E YM. X+1. X. YR. N. Z( X , X+1 ). Z( R , X ) YX. Z( X+1 , YX+1. N). YN. Figura 2.1. Modelo de un radial equivalente de la red X. X+1 Z( X , X+1 ). S/E YX. YX+1. Figura 2.2. Modelo simplificado de un radial equivalente de la red, en una sección. 28.
Figure


+7




Outline
Teoría Básica de los Métodos Basados en el Conocimiento (MBC)
Técnica de regresión basada en MSV
Técnica de regresión basada en k-NN
Técnicas de Optimización
Fundamentación de la estrategia propuesta
Explicación de la metodología y diseño algorítmico
Análisis de los MBM
Parametrización de los MBCr (EJ1 y EJ2)
Análisis del MBCr EJ2
Conclusiones generales
Documento similar
En estos últimos años, he tenido el privilegio, durante varias prolongadas visitas al extranjero, de hacer investigaciones sobre el teatro, y muchas veces he tenido la ocasión
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
dente: algunas decían que doña Leonor, "con muy grand rescelo e miedo que avía del rey don Pedro que nueva- mente regnaba, e de la reyna doña María, su madre del dicho rey,
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
Tras establecer un programa de trabajo (en el que se fijaban pre- visiones para las reuniones que se pretendían celebrar los posteriores 10 de julio —actual papel de los
