Desarrollo e Implementación de Módulos Didácticos de Bajo Costo para la Enseñanza de Tecnología a Población Estudiantil
27
0
0
Texto completo
(2) Tabla de contenido. 1. INTRODUCCIÓN. 3. 2. OBJETIVOS. 3. 2.1 Objetivo General. 3. 2.2 Objetivos Específicos. 3. 3. JUSTIFICACIÓN. 3. 4. PLANTEAMIENTO DEL PROBLEMA. 4. 5. MARCO TEÓRICO. 4. 5.1 Conceptos Previos. 4. 5.2 Antecedentes e Investigaciones previas. 5. 5.3 STEM. 5. 6. METODOLOGÍA. 6. 6.1 Diagrama general. 6. 7. DESARROLLO DEL MARCO TEÓRICO. 7. 7.1 Construcción: Diseño de los módulos. 7. 7.2 Implementación: Fundación Vida y Liderazgo de la localidad de Usme. 13. 7.3 Procesamiento digital e interfaz gráfica. 15. 8. RESULTADOS. 16. 9. CONCLUSIONES. 23. Bibliografía. 25. ANEXOS. 25. 2.
(3) 1. INTRODUCCIÓN El acceso e implementación de tecnologías de la información y los dispositivos electrónicos tienen un alto costo para algunas poblaciones del territorio colombiano, teniendo en cuenta las grandes necesidades que afrontan debido a que sus recursos son limitados. Para brindar una alternativa dentro el campo educativo se encuentra la posibilidad de implementar diferentes métodos y procedimientos, por esta razón en el presente documento se expone el diseño e implementación de módulos educativos de bajo costo para la enseñanza de tecnología a estudiantes de edades comprendidas entre los 8-17 años. La idea principal de dichos módulos es incentivar el aprendizaje y despertar el interés en dicha población estudiantil. 2. OBJETIVOS 2.1 Objetivo General Desarrollar una plataforma educativa para la enseñanza de la tecnología en población estudiantil. 2.2 Objetivos Específicos ● Diseñar un controlador compatible con múltiples módulos. ● Desarrollar módulos adaptables al controlador. ● Desarrollar guías didácticas para el uso de la plataforma educativa. 3. JUSTIFICACIÓN Según una investigación del año 2012 realizada por la Organización de Naciones Unidas para la Educación, la Ciencia y la Cultura, (Unesco), Colombia tiene una buena tasa de alfabetización entre la población adulta, sin embargo el nivel de escolaridad en los niños y adolescentes y su continuidad dentro del ámbito académico es baja. También se encontró en la investigación que hay desigualdad, la cual se manifiesta desde el inicio de la escolaridad, dado que existe una demora al momento de iniciar la etapa estudiantil por parte de los niños cuyas familias cuentan con pocos recursos económicos, esta es de un 42 % frente a un 11 % de los hijos de familias de estratos altos [1]. 3.
(4) Con respecto a la tecnología, se encontró que el 45 % de los colombianos tiene una vaga noción del tema, según el profesor Ramírez Vallejo miembro del cuerpo de profesores de la Universidad de Harvard y catedrático en la Universidad de los Andes, refiriéndose a una encuesta de alfabetización digital [2]. Una de las principales razones para el déficit en el desarrollo de educación y la tecnología, es la baja inversión por parte del gobierno. Según Ulia Nadezhda Yemail, directora de Redes del Conocimiento de Colciencias, indicó que en Colombia actualmente se destina un 0.2 % del PIB, mientras que América Latina un 0.8 %. Regionalmente, Bogotá aportó el 57,5% del presupuesto a la educación; Medellín, el 7,27%; y Antioquia, el 6,24% pero en el resto del país aproximadamente es del 1%. 4. PLANTEAMIENTO DEL PROBLEMA La dificultad para acceder a la ciencia y las nuevas tecnologías en los diferentes entornos educativos genera un déficit de aprendizaje y evita que se obtenga un mejor desempeño en asignaturas relacionadas con pensamiento lógico, resolución de problemas y uso adecuado de la tecnología. Pese a que el gobierno colombiano ha implementado medidas que contribuyen a mejorar el acceso a la tecnología (tal como se evidencia en las cifras que indican que en el año 2017 para el total nacional, el 44,3% de los hogares poseía un computador de escritorio, portátil o tableta [3]), esto no resulta suficiente, ya que el contar con algún dispositivo electrónico no implica que su uso sea de carácter educativo. Existen diferentes empresas que se encargan de realizar plataformas educativas en donde se involucra la tecnología, pero en definitiva estos suelen ser de alto costo y de difícil acceso para toda la población estudiantil.. 5 MARCO TEÓRICO 5.1 CONCEPTOS PREVIOS Según la Real Academia Española, un módulo es una pieza o conjunto unitario de piezas que se repiten en una construcción de cualquier tipo, para hacerla más fácil, regular y económica. Además también lo define como una unidad educativa que forma parte de un programa de enseñanza. [4]. 4.
(5) 5.2 ANTECEDENTES E INVESTIGACIONES PREVIAS En un proyecto desarrollado por miembros de la IEEE en Latinoamérica se propone una metodología de asistencia educativa con el objetivo de proporcionar el acceso a las actividades de robótica educativa a los estudiantes con problemas visuales. Una de las bases es la introducción de bajos costos en la tecnología llamada CardBot 2.0 [5]. Un proyecto hecho por los estudiantes J.J. Castañeda, A.F. Ruiz-Olaya, W. Acuña, A. Molano se basa en cursos de robótica como un plan de estudios de ingeniería electrónica los cuales proporcionan a los estudiantes conocimiento y habilidad en aspecto como el diseño, simulación, implementación y operación de los sistemas que utilizan tecnologías de robótica para aplicaciones en áreas tales como los industriales, servicios y otros [6]. La Universidad minuto de Dios en Bogotá, Colombia, propone un modelo educativo para grupos de investigación en programas tecnológicos basados en conceptos de autoaprendizaje y autodidactismo denominado “incubadoras de investigación”. El principal objetivo del modelo es definir los diferentes niveles de aprendizaje y algunas tareas necesarias con el fin mejorar la adquisición del conocimiento y así fomentar y formar a los estudiantes en investigación [7]. En la Facultad de electrónica, Telecomunicaciones e Información de la Universidad de Cluj– Napoca, en Rumania se describe una nueva estrategia de aprendizaje, basado en proyectos (PBL), que se pueden integrar fácilmente en diferentes plataformas educativas. También muestran ejemplos de las formas en que los diferentes conceptos fundamentales de la electrónica se aplican a través de PBL, utilizando dos entornos de aprendizaje distintos [8]. En un proyecto desarrollado por C. H. Willis se presenta al instructor la elección de ilustraciones que estimulen el interés del estudiante. Este artículo fue presentado en una de las sesiones educativas de la Junta General de invierno, el autor explora el campo de la electrónica de potencia como medio educativo en la enseñanza de la ingeniería [9]. 5.3 STEM STEM es el acrónimo en inglés de nombres significativos de cuatro materias o disciplinas académicas: Science, Technology, Engineering y Mathematics. Las iniciativas o proyectos educativos englobados bajo esta denominación pretenden aprovechar las similitudes y puntos 5.
(6) en común de estas cuatro materias para desarrollar un enfoque interdisciplinario del proceso de enseñanza y aprendizaje, incorporando contextos y situaciones de la vida cotidiana, y utilizando todas las herramientas tecnológicas necesarias [10]. 6. METODOLOGÍA 6.1 Diagrama general. Alimentación Interna. Módulo 1 Bienvenido al mundo de los motores. Módulo 2 Módulo controlador. Comunicación sin límites. Módulo 3 Brazo Robótico. Aplicación móvil. Control Manual. Alimentación Externa. Interfaz gráfica. Figura 1. Diagrama del Sistema. (Fuente propia). Alimentación Interna y Externa: Se encarga de suministrar la energía necesaria a los dispositivos implementados para su respectivo funcionamiento. ● Como fuente de alimentación interna se usaron 3.3 Voltios, voltaje suministrado por tarjeta de desarrollo Freescale KL25Z. ● Como fuentes de alimentación externa se usaron: Fuente A: Adaptador de 12 Voltios – 0.5 Amperios, implementada en el módulo 1 Fuente B: 2 Powerbanks de 5V - 1000mah, implementadas en el módulo 2. 6.
(7) Fuente C: Adaptador de 5 Voltios - 2 Amperios, implementada en el módulo 3 Módulos: Conjunto de piezas compuestas de circuitos acondicionados que agrupados de formas distintas con otros elementos constituyen una estructura mayor, cada módulo representa una actividad didáctica que facilita el aprendizaje por parte de los estudiantes. Módulo controlador: Es el dispositivo encargado de procesar información y funciones de este proyecto, es el procesador de datos numéricos y ejecutor de funciones dadas a partir de su programación. Dicha plataforma está construidas sobre el procesador MKL25Z128VLK4 de 48 MHz, 16 KB de RAM y 128 KB de Flash. Control Manual: Accionamiento que permite controlar o regular acciones relacionadas con un sistema, en este caso consiste en un mando implementado para el control del módulo 3. Dicho accionamiento consta de 4 potenciómetros de 10K Ohmios que permiten el movimiento de cada eje del brazo robótico mediante la variación de PWM. Interfaz gráfica: Programa informático cuyo objetivo principal es indicar de manera visual datos numéricos, variables y acciones suministradas por el módulo controlador. 7. DESARROLLO DEL MARCO TEÓRICO 7.1 Construcción: Diseño de los módulos Módulo controlador Este módulo está compuesto principalmente por la tarjeta de desarrollo Freedom KL25Z. Su diseño consiste en una caja de MDF con 12 perforaciones en la parte superior. Sus dimensiones: 10 cm de largo, 7 cm de ancho, 4.5 cm de alto y 0.5 cm de espesor. Las piezas fueron realizadas con corte láser y posteriormente ensambladas, en las perforaciones se añadieron conectores hembra tipo banana de 4 mm.. 7.
(8) Figura 2. Resultado final del módulo controlador. (Fuente propia). La conexión y programación del módulo controlador se hace mediante comunicación serial a través del puerto OpenSDA de la tarjeta de desarrollo. El OpenSDA es un adaptador serial y de depuración de estándar abierto, lo que quiere decir que básicamente permite que un ordenador se conecte directamente a la tarjeta de desarrollo e instalar un nuevo software.. Primer módulo: Bienvenido al mundo de los motores Este módulo tiene como objetivo enseñar acerca del uso y tipos de motores que normalmente son utilizados a nivel académico. Está diseñado en una caja en MDF de 0.5 cm de espesor, sus dimensiones son: 10 cm de altura, 30 cm de largo y 30 cm ancho, cuenta con 8 perforaciones en la parte superior para conectores hembra tipo banana de 4 mm y un espacio óptimo para el emplazamiento de los componentes. Está compuesto por un motor DC que funciona en un rango entre los 3-12 voltios y un valor máximo en corriente de 110 miliamperios, este posee un mecanismo reductor de relación de cambio 48:1 y torque aproximadamente de 1 kilogramo por centímetro. El circuito implementado para el correcto funcionamiento de este motor está compuesto por un circuito integrado L293D con el objetivo de regular la corriente y aumentar el voltaje del motor, también cuenta con un circuito para el sensor de herradura ITR8102 con un voltaje de emisor a colector de 5 voltios y una corriente de colector de 30 miliamperios que sirve como encoder convirtiendo el movimiento en una señal eléctrica y posteriormente usar dicha señal en la tarjeta de desarrollo del módulo controlador.. 8.
(9) Figura 3. Resultado final del módulo 1. (Fuente propia). Como generador se utiliza un motor paso a paso de 1.8° por paso, 200 pasos por vuelta, el cual genera máximo 6 voltios con una corriente 2 miliamperios, el circuito de acondicionamiento implementado consta de un rectificador para la conversión de voltaje de corriente alterna a voltaje en corriente directa de 5 voltios, para que pueda ser ajustada al módulo controlador por medio de una entrada análoga-digital Finalmente se usa un servomotor de 9 gramos, Tower Pro Sg90 cuya corriente máxima es de 100 miliamperios, para este se implementó un circuito de aislamiento de tierras que incluye un circuito integrado que se encarga de regular el voltaje suministrado por la fuente externa, llevándolo a un valor de 5 voltios, valor nominal para el funcionamiento adecuado de dicho motor.. 9.
(10) Figura 4. Diagrama esquemático del módulo 1. (Fuente propia). Segundo módulo: Comunicación sin límites Este módulo tiene como objetivo enseñar acerca del protocolo de comunicación Bluetooth y trata de extenderlo a otros tipos de comunicación tomando como referencia los diferentes usos que tienen en la vida diaria. El módulo utilizado es el HC-05, con voltaje de alimentación de 5 voltios, un consumo aproximado de 50 miliamperios, una potencia menor o igual a 2.5 mili vatios y un rango de alcance de 5 a 10 metros. Para la activación, este módulo funciona emparejando un dispositivo móvil como maestro y el HC 05 actúa como el esclavo. Está diseñado en MDF de 0.5 cm de espesor y de aproximadamente 20 centímetros de largo, 12 centímetros de ancho y 10 centímetros de alto. Cuenta con: una caja de plástico diseñada por medio de impresión 3D a la cual se realizaron 12 perforaciones en las que se adaptaron conectores hembra tipo banana de 4 mm, con dos Powerbank de 71 gramos cada una que funcionan a un voltaje máximo de 5 voltios – 1000mah y dos motorreductores con un parámetro de reducción de 1:48 cuyos valores nominales de funcionamiento están entre los 5 voltios y 110 miliamperios.. 10.
(11) Figura 5. Coche didáctico correspondiente al módulo 2. (Fuente propia). Cuenta con dos circuitos: el primero compuesto por el puente h L293D que funciona a 5 voltios y el segundo para la conexión del módulo Bluetooth.. Figura 6. Circuito correspondiente al módulo (Fuente propia). Tercer módulo: Brazo robótico Este módulo tiene como objetivo enseñar de forma introductoria la importancia y el uso de la robótica en la vida académica. Consiste en un robot manipulador poliarticulado de 4 ejes, que representa un sistema de agarre en forma de pinza con posición fija y un grado de libertad, con el cual que se pretende enseñar el concepto de localización espacial (ubicación y orientación). 11.
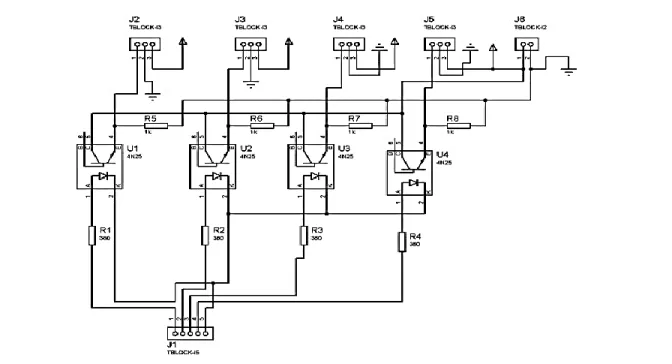
(12) Las dimensiones son: 22 cm de alto, 18 cm de largo y 12 cm de ancho, las piezas fueron realizadas con cortes láser MDF de 3mm de espesor totalmente desmontable. También está compuesta de una caja individual con cuatro potenciómetros de 10 kilo ohmios que son las entradas analógicas de las que el módulo controlador recibe los datos para luego dar el movimiento a los servomotores por grados mediante conversión de PWM.. Figura 7. Resultado final del módulo 3(fuente propia). El circuito necesario para el funcionamiento de este módulo está compuesto por un circuito con 4 optoacopladores 4N25, con resistencias de 380 ohmios en la entrada del pulso y 10 kilo ohmios en la salida de cada optoacoplador con el fin de controlar la corriente que pasa por cada servomotor y aislar la tierra de la entrada de pulsos con respecto la fuente externa. Dicha fuente externa es de un voltaje máximo 5 voltios y una corriente máxima de 2 amperios.. 12.
(13) Figura 8. Circuito correspondiente al módulo 3 (fuente propia). 7.2 Implementación: Fundación Vida y Liderazgo de la localidad de Usme. Para la implementación de los módulos fue necesario contar con el apoyo de la Fundación Vida y Liderazgo ubicada en localidad de Usme, en la cual se seleccionó una población juvenil entre los 8 y 17 años con el fin de poner a prueba los módulos y analizar si el conocimiento adquirido es un aporte significativo en la formación de conceptos básicos de tecnología.. El estudio se hizo de la siguiente manera, se tomó un grupo de 10 estudiantes del taller de robótica que se brinda en este espacio los días sábado en la fundación, se hicieron tres pruebas y se solicitó a los jóvenes que teniendo en cuenta los manuales propuestos usarán los módulos, los armaran y siguieran las instrucciones correspondientes. Antes de dichas instrucciones, se les habló un poco de los elementos a usar. En las siguientes tablas se pueden ver algunos resultados de dichas pruebas. Las preguntas orientadoras para dicho estudio fueron: ¿Cuántos estudiantes hicieron uso adecuado de los módulos y los elementos que los componen? y ¿qué cosas o temas desconocían relacionados a los mismos?. 13.
(14) Figuras 9 y 10. Resultados de las pruebas hechas en la fundación (Fuente propia). Figura 11. Implementación del módulo 1. (Fuente propia). Figura 12. Implementación del módulo 2 (Fuente propia). 14.
(15) Figura 13. Implementación del módulo 3. (Fuente propia). 7.3 Procesamiento Digital E Interfaz Gráfica Para módulo #1 la interfaz gráfica fue desarrollada con el lenguaje de programación C# a través del entorno de desarrollo Visual Studio Community (gratuito), adicionalmente para mejorar su diseño se añadió un complemento llamado DotNetBar, se utilizó el protocolo de comunicación serial para el envío y recepción de los datos.. Figuras 14 y 15. Interfaz gráfica programada en visual Studio, Script del código principal. (Fuente propia). Para el módulo #2 se desarrolló una aplicación Android a través la plataforma MIT App Inventor 2, la comunicación que se establece se realiza vía Bluetooth, está envía unos comandos para que la tarjeta de desarrollo por medio del módulo Bluetooth los procese y lo convierta en movimientos de adelanto, retroceso y dirección.. 15.
(16) Figuras 16 y 17. Aplicación Android para el segundo módulo (Fuente propia). 8. RESULTADOS Es importante resaltar que el uso de los módulos es de carácter estrictamente académico, sin embargo se realizaron diferentes pruebas en las que se evaluaron algunos aspectos físicos y mecánicos.. Módulo 1 • Motor DC De este módulo se realizaron dos mediciones: la primera consiste en las revoluciones por minuto a las que se mueve la llanta y la segunda es la distancia recorrida de acuerdo al número de vueltas. Se varió la velocidad del motor (variación del pwm) y se tomaron repetidas muestras. Los datos obtenidos están en un rango de 60 segundos con el fin de determinar si el valor medido es cercano al valor real de acuerdo la programación realizada. De lo anterior se relaciona la siguiente tabla con la información Tiempo (seg) 60 60 60 60 60 60 60. Pwm (%). Rpm real. 10 10 10 10 10 30 30. 60 60 60 60 60 120 120. Rpm obtenido 60 62 62 62 61 118 122 16. Distancia (m) 12,438 12,8526 12,8526 12,8526 12,6453 24,4614 25,2906. Rpm error Abs. 0 2 2 2 1 2 2. Rpm error % Abs. 0,00% 3,33% 3,33% 3,33% 1,67% 1,67% 1,67%.
(17) 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60. 30 30 30 50 50 50 50 50 70 70 70 70 70 100 100 100 100 100. 120 120 120 150 150 150 150 150 240 240 240 240 240 450 450 450 450 450. 118 115 118 164 162 169 170 165 240 250 245 245 246 449 452 442 473 414. 24,4614 23,8395 24,4614 33,9972 33,5826 35,0337 35,241 34,2045 49,752 51,825 50,7885 50,7885 50,9958 93,0777 93,6996 91,6266 98,0529 85,8222. 2 5 2 14 12 19 20 15 0 10 5 5 6 1 2 8 23 36. 1,67% 4,17% 1,67% 9,33% 8,00% 12,67% 13,33% 10,00% 0,00% 4,17% 2,08% 2,08% 2,50% 0,22% 0,44% 1,78% 5,11% 8,00%. Tabla 1. Información de medición realizada en Motor DC – Módulo 1 (Fuente propia). De los resultados obtenidos tras la prueba realizada se observa que el máximo porcentaje de error presentado es de 13,33% y en promedio hay un error de 4,09%. En cuanto a la distancia real y la distancia obtenida mediante la medición coinciden de manera exacta. Para calcular los errores, se usaron las siguientes ecuaciones: 𝐸𝑎 = |𝐷𝑟 − 𝐷𝑜| |𝐷𝑟 − 𝐷𝑜| 𝐸𝑝 = ( ) ∗ 100 𝐷𝑟 Dónde: Ea: Error absoluto Dr: Dato real Do: Dato obtenido Ep: Error porcentual Se obtienen los promedios de cada muestra tomada de acuerdo al pwm y se relacionan en la siguiente tabla:. 17.
(18) Tiempo (seg) 60 60 60 60 60. Pwm (%) 10 30 50 70 100. Rpm real Rpm obtenido 60 120 150 240 450. 61,4 118,2 166 245,2 446. Distancia (m) 12,72822 24,50286 34,4118 50,82996 92,4558. Rpm error Abs. 1,4 2,6 16 5,2 14. Rpm error % Abs. 2,33% 2,17% 10,67% 2,17% 3,11%. Tabla 2. Promedio de Resultados obtenidos – Módulo 1 (Fuente propia). En el promedio realizado se evidencia que el porcentaje de error máximo es de 10.67% cuando el pwm se encuentra al 50%.. Gráfica 1. Porcentaje de PWM vs Distancia recorrida en 1 minuto (Fuente Propia). 18.
(19) Gráfica 2. Porcentaje de PWM vs RPM (Real-Azul y Obtenido Naranja) (Fuente Propia). • Motor Paso a paso (Generador) El motor utilizado genera un voltaje alterno en forma de onda cuadrada, por esta razón con el circuito de rectificación se transforma a voltaje y posteriormente se almacena en un condensador. Tras medir el tiempo de descarga se obtienen los siguientes resultados:. Voltaje 2,33 3,43 2,75 3,94 4,54 1,12 2,45. Tiempo de descarga (s) 11,11 12,1 11,98 12,28 13 8,12 11,85. Tabla 3. Voltaje medido –Tiempo de descarga (Fuente propia). 19.
(20) • Servomotor Para comprobar la exactitud con la que el servomotor medía los ángulos se realizó una prueba en donde por medio de un transportador se comprobaba si el ángulo ingresado coincidía con el movimiento realizado. Una vez realizada dicha prueba se obtuvo la siguiente información:. Ángulo Real 0 30 60 90 120 150 180. Ángulo Medición 0 33 62 93 121 150 180. Ángulo Medición 0 3 2 3 1 0 0. Ángulo Medición 0,00% 10,00% 3,33% 3,33% 0,83% 0,00% 0,00%. Tabla 3. Ángulo Real vs Ángulo de Servomotor (Fuente propia). Ángulo- servomotor 200 180. 180. 160. 150. 140 121. 120 100. Ángulo Real. 93. 80. Ángulo Servomotor. 62. 60 40. 33. 20 0. 0 1. 2. 3. 4. 5. 6. 7. Gráfica 3. Angulo Real vs Angulo Servo motor (Fuente Propia). El máximo error se presenta entre los ángulos 20-100, sin embargo en los demás ángulos este resulta ser preciso. El promedio de error en la medición del servomotor es del 2.49%.. 20.
(21) Módulo 2 Para este módulo se realizaron dos pruebas: la primera con el fin de comprobar la precisión del objeto tras realizar un movimiento en línea recta y el segundo el máximo alcance de la comunicación establecida entre el dispositivo móvil y el objeto, vía bluetooth. • Prueba de Desvío.. Figura 18. Prueba de desvío- Módulo 2 (Fuente Propia). Se realizaron 3 intentos a una distancia de 1 metro. En la primera hubo un desvío de 10 cm, en la segunda fue de 23 cm y en la tercera fue de 43cm. La principal razón para que el desvío se dé hacía el lado derecho se debe a que la llanta izquierda gira a 128 rpm mientras que la derecha a 116 rpm y el incremento en la diferencia con respecto al eje de origen se da por el desgaste de la batería. • Prueba de Alcance Máximo Para esta prueba se realizaron más de 10 mediciones a diferentes distancias en campo abierto. Según el fabricante el alcance máximo del módulo bluetooth HC-05 es de 8-10 21.
(22) metros, teniendo en cuenta que el módulo funciona como esclavo depende del dispositivo Android y el máximo alcance que este posea. En la prueba se utilizó un dispositivo con tecnología Bluetooth 4.2 cuyo alcance máximo es de 100 metros y una tasa de transferencia que oscila entre los 25 y 32 MBPS, sin embargo en la prueba el alcance máximo sin pérdida de información es de aproximadamente 116.64 metros.. Figura 19. Prueba de alcance Bluetooth (Google Maps). Figura 20. Prueba de alcance máximo del. .. Bluetooth (Google Maps). Módulo 3 Para este módulo se utilizan 4 servomotores cuyo alcance máximo es de 180 grados. La prueba realizada consiste en confirmar los grados programados para la movilidad del robot. El motor 1 alcanza una movilidad de 45 grados si este valor se excede genera que el motor se fuerce, los motores 2 y 3 logran una movilidad límite de 90 grados y finalmente el motor 4. 22.
(23) puede moverse has 180 grados, sin embargo se ha limitado tan sólo 120 grados teniendo el espacio óptimo de trabajo.. Figura 21. Robot manipulador poliarticulado de 4 ejes (Fuente propia). 9. CONCLUSIONES ● Debido a la evidencia mencionada en las pruebas realizadas en la fundación Vida y Liderazgo, se puede ver que el manejo de la tecnología es un método sólido para tener un mejor desempeño en colegios y entornos educativos, es por eso que la tecnología implementada en los módulos es una medida que contribuye a mejorar el acceso al conocimiento. ● La evidencia presentada en los resultados nos muestra que en el sistema de módulos tiene un desfase de precisión máximo de 4.09% en promedio de las medidas reales respecto a las teóricas velocidad y RPM del primer módulo, aun así es un sistema estable en un 95.91%, por lo que es una herramienta útil en aplicaciones académicas que involucren electrónica y robótica en el proceso de aprendizaje.. 23.
(24) . Como resultado de las mediciones de alcance máximo del Bluetooth, es posible concluir que la pérdida de datos no depende directamente del módulo HC-05 del módulo #2, sino de la potencia de la señal de Bluetooth del dispositivo móvil. Por lo que dicho alcance puede variar según especificaciones técnicas del dispositivo.. Bibliografía [1]. El Pais, “Desigualdad en el acceso a la educación persiste en Colombia: Unesco,” El Pais Noticias, 2012. [Online]. Available: http://www.elpais.com.co/colombia/desigualdad-en-el-acceso-a-la-educacionpersiste-en-unesco.html. [Accessed: 04-May-2017].. [2]. El Tiempo, “Análisis del porqué es tan mala la educación en Colombia Archivo Digital de Noticias de Colombia y el Mundo desde 1.990 eltiempo.com,” 2014. [Online]. Available: http://www.eltiempo.com/archivo/documento/CMS-13570938. [Accessed: 04May-2017].. [3]. C. Moggia and M. Pereira, “Boletín técnico,” Pomáceas, vol. 7, no. 3, pp. 1–4, 2017.. [4]. Real Academia Española, “Definición de módulo.” [Online]. Available: http://dle.rae.es/srv/search?m=30&w=módulo. [Accessed: 17-Aug-2018].. [5]. R. P. Barros, A. M. F. Burlamaqui, and S. O. Azevedo, “CardBot - Assistive. Technology for Visually Impaired in Educational Robotics : Experiments and Results,” vol. 15, no. 3, pp. 517–527, 2017.. [6]. J. J. Castaneda, A. F. Ruiz-Olaya, W. Acuna, and A. Molano, “A low-cost Matlab-based educational platform for teaching robotics,” 2016 IEEE Colomb. Conf. Robot. Autom., pp. 1–6, 2016.. 24.
(25) [7]. C. A. Herazo and J. A. Ariza, “A proposal of educational model for research incubators in technological programs of electronics,” 2016 IEEE 8th Int. Conf. Eng. Educ., pp. 143–148, 2016.. [8]. T. Vlad and D. Pitic??, “Implementing some fundamental electronics concepts using project based learning in educational platforms,” Proc. Int. Spring Semin. Electron. Technol., vol. 2015–Septe, pp. 510–515, 2015.. [9]. W. G. Meeting, “Power Electronics as an Educational Medium,” no. August, pp. 647–649, 1949.. [10] Odite, “STEM, STEAM... ¿pero eso qué es? - ODITE: Observatorio de Innovación Tecnológica y Educativa,” 2015. [Online]. Available: http://odite.ciberespiral.org/comunidad/ODITE/recurso/stem-steam-pero-esoque-es/58713dbd-414c-40eb-9643-5dee56f191d3. [Accessed: 04-May-2017]. ANEXOS Conexiones Las conexiones de cada módulo están ordenas y de forma explícita en la las siguientes tablas 1,2 y 3: Tabla 1 Conexiones correspondientes al módulo 1. GENERADOR. A2. MOTOR IN1. A3. MOTOR IN2. A4. ENCODER. D2. SERVO IN. D3. VCC. VCC. GND. GND. Figura 16. Diagrama de conexión Módulo 1. 25.
(26) Tabla 2 Conexiones correspondientes al módulo 2.. MOD2. CONTROLADOR. RX (A0). A0. TX (A1). A1. MOTOR1 (A2) MOTOR2 (A3) MOTOR3 (A4) MOTOR4 (A5) IN1 (D1). D1. IN2 (D2). D2. IN3 (D3). D3. IN4 (D4). D4. VCC. VCC. GND. GND. Figura 17. Diagrama de conexión Módulo 2. Tabla 3 Conexiones correspondientes al módulo 3. MOD3. CONTROL. SERVO1 (D1). D1. SERVO2 (D2). D2. SERVO3 (D3). D3. SERVO4 (D4). D4. GND. GND. VCC. POT. GND VCC. A0. POT1. A1. POT2. A3. POT 3. A4. POT 4. Figura 18. Diagrama de conexión Módulo 3. 26.
(27) Como se puede evidenciar en las anteriores tablas, se muestran las conexiones de cada módulo con el módulo controlador también mediante esquemas un poco más visuales para una rápida y óptima comprensión, como en el caso de los módulos 1 y 2. Para el caso del módulo 3 se deben conectar tres cajas, donde la tercera caja es la caja que trae los potenciómetros que son los que van a mover los servomotores de forma análoga.. 27.
(28)
Figure




+7




Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
De acuerdo con Harold Bloom en The Anxiety of Influence (1973), el Libro de buen amor reescribe (y modifica) el Pamphihis, pero el Pamphilus era también una reescritura y
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
