CURSO DE GEOMETRÍA ANALÍTICA
Oscar Cardona Villegas
Héctor Escobar Cadavid
UNIVERSIDAD PONTIFICIA BOLIVARIANA
ESCUELA DE INGENIERÍAS
MÓDULO 2 VECTORES
En la matemática moderna se ha llegado al concepto de vector por una generalización del concepto geométrico o físico del mismo en el espacio ordinario de tres dimensiones. En geometría analítica, que es una amalgama del álgebra y la geometría, los vectores se emplean tanto en sentido geométrico como en sentido algebraico, por lo tanto, se abordará el estudio de los vectores bajo ambas perspectivas.
2.1 DEFINICIÓN DE VECTOR
Los vectores tuvieron su origen en la física. Se usaron por primera vez en mecánica para representar una fuerza concentrada. Se sabe que hay dos tipos básicos de cantidades que se consideran en la física: las que quedan completamente determinadas por una magnitud y se denominan escalares. Toda cantidad escalar se representa con un número real que indica su magnitud según una escala o unidad de medida elegida previamente. Son ejemplos de cantidades escalares: tiempo, distancia, masa, densidad, temperatura, trabajo, carga eléctrica, área, volumen y población. Como los escalares son números reales, se usa el álgebra de reales para operarlos. En este libro los escalares se van a representar con letras minúsculas.
denominan vectores. Son cantidades vectoriales, la posición relativa entre dos puntos, fuerza, velocidad, aceleración y momento entre otras.
Los vectores forman un conjunto con el cual se puede constrir un álgebra. El álgebra de los reales no sirve para hacer operaciones con vectores.
2.1.1 Definición geométrica
Se llama vector
AB
al segmento de recta dirigido u orientado cuyo punto inicial u origen esA
y cuyo punto final o extremo esB
.La longitud del segmento
AB
, definida una unidad de medida, es la magnitud o módulo del vector y se representaAB
. La inclinación del vectorAB
es la de la rectaAB
(Toda recta determina una inclinación y todas las rectas y segmentos paralelos a ella tienen la misma inclinación), y el sentido, dada una inclinación, es en el que se hace el recorrido deA
haciaB
. Inclinación y sentido constituyen la dirección del vector la cual se representadirAB
. En este orden de ideas, todo vectorAB
está asociado con el movimiento de una partícula en línea recta desde el puntoA
hasta el puntoB
. El vectorAB
se representa con una flecha que indica la magnitud y la dirección.A
B
Figura 2.1. Definición geométrica de vector
a. Las letras de su punto inicial y final, en ese orden, con una flecha encima o sin ella:
AB
oAB
b. Con una letra mayúscula o minúscula con una flecha encima:
A
a
,i
,v
Nota: En este texto, sin embargo y por conveniencia, se van a representar los vectores con negrilla.
Dados dos vectores
AB
yCD
, si ocurre que al hacer coincidir su punto inicialA
con el punto inicialC
, también coinciden sus puntos finalesB
yD
, se dice queAB
es igual aCD
, lo cual se escribeAB CD
=
. Esto implica queAB
yCD
tienen la misma magnitud y la misma dirección. Todos los vectores iguales aAB
forman una clase* de vectores que se denomina vector libre. Es decir todos lossegmentos de recta dirigidos con igual módulo y dirección representan al mismo “ente” geométrico denominado vector libre, o simplemente vector. Entonces, un vector (libre) no tiene puntos inicial y final definidos sino que puede trasladarse paralelamente a si mismo sin que cambien sus características.
Definición 2.1
Un vector, geométricamente, es un segmento de recta dirigido caracterizado por una magnitud y una dirección.
Definición 2.2
a. Al vector cuyo módulo es cero se le llama vector nulo, se representa por
0
y se acepta que no tiene dirección.b. Se denomina vector unitario a un vector cuyo módulo sea la unidad.
c. Un vector que tenga la misma inclinación y el mismo módulo que
AB
, pero sentido opuesto, se llama vector inverso el cual es único, y se escribeBAo
AB
−
. Además, se cumple que− −
(
AB
)
=
AB
.d. Un vector con la misma inclinación y sentido contrario que
AB
(y cualquiermagnitud) se llama vector opuesto.
2.1.2 Definición algebraica
La definición algebraica de un vector se establece al referirlo a un espacio euclidiano n-dimensional. Es posible asociar a cada punto
P
deE
n un vector cuyo punto inicial sea el origen deE
n y cuyo punto final sea el puntoP
. A este vectorOP
que también se representaR
, se le denomina vector de posición ovector radar de P. De este modo a cada punto
P
deE
n le corresponde un único vectorR
y cada vectorR
está asociado con un único punto deE
n. Esta biyección permite representar al vector de posición correspondiente al puntoP
de coordenadas( , ,..., )
x x
1 2x
n con la misma n-ada pero escritax x
1, ,...,
2x
n solo para evitar confusiones.Definición 2.3
Algebraicamente un vector es una n-ada ordenada de números reales
1
, ,...
2 nx x
x
enE
n. Losx
ii
=
1,2,...,
n
se llaman componentes del vector.Un vector
x x
1, ,...
2x
n es libre, es decir que no es necesariamente un vector de posición sino que puede tener su punto inicial en cualquier punto deE
n, pero si se toma como vector de posición (vectores de la misma clase) su punto final tiene coordenadas( , ,..., )
x x
1 2x
n .En la siguiente figura se ilustran los casos en
E
2 yE
3.Y
X R=<x,y,z> Z
R P(x,y,z) Y
X P(x,y)
R
R=<x,y>
Figura 2.2. Definición algebraica de vector
En
E
n, el vector nulo es0
=
0,0,...,0
y el vector inverso deA
=
x x
1, ,...,
2x
n es− = − −
A
x
1,
x
2,...,
−
x
nUna vez establecida la intima relación entre los vectores y el conjunto de las n-adas de números reales en un espacio euclidiano (isomorfismo entre vectores y
n
) resulta sencillo poder determinar la magnitud y la dirección de un vector si se conocen las componentes de la n-ada que lo representa.
Sea
V
=
x x
1, ,...,
2x
n un vector deE
n. Para determinar su magnitud y dirección, se toma Vcomo un vector de posición. De este modo:b. La dirección de
V
se da en términos de los cosenos de los ángulos que la recta que contiene al vector de posición forma con cada uno de los semiejes positivos coordenados. Estos cosenos se llaman cosenos directores deV
.Definición 2.4
Dado un vector
V
=
x x
1, ,...,
2x
n deE
n, entonces:a. El módulo de
V
es 21 n
i i
V
x
=
=
b. La dirección de V está dada por
cos( )
ix
iV
=
,
i
0, ,
i
=
1,2,..,
n
Actividad en clase: Ilustrar los casos de
E
2 yE
3 y casos particulares.2.2 ALGEBRA VECTORIAL
Sea
V
* el conjunto de los vectores. Es posible dotar aV
*de algunas leyes de composición para construir un álgebra de vectores. Estas operaciones se definen tanto en el sentido geométrico de los vectores como en el sentido algebraico, sin embargo, las demostraciones de las propiedades se hacen algebraicamente.2.2.1 Igualdad
a. La igualdad geométrica de vectores ya fue definida: dos vectores
A
yB
son iguales,A B
=
, si y sólo si tienen la misma magnitud y la misma dirección, es decirb. En forma algebraica, los vectores
A
=
a a
1, ,...,
2a
n yB
=
b b
1, ,...,
2b
n den
E
son iguales si y sólo sia
i=
b
i parai
=
1,2,..., .
n
La igualdad de vectores es una relación de equivalencia lo que significa que cumple ser reflexiva, simétrica y transitiva. Para
A B C
, y
vectores,a. Reflexiva:
A A
=
b. Simétrica: Si
A B
=
entoncesB A
=
c. Transitiva: Si
A B
=
yB C
=
entoncesA C
=
2.2.2 Adición
a. Método geométrico: Dados
A
,B V
*. SeaP P
0 1 el segmento orientado que representa al vectorA
, el vectorB
se puede representar por medio de un segmento orientado que tenga su origen enP
1 y su extremo enP
2. Se define el vector sumaA B
+
como el representado por el segmento orientadoP P
0 2. Esta se conoce como la regla del polígono para sumar vectores. (fig. 2.3)P1 P2
P0
A
A+B B
Figura 2.3. Adición de vectores
Existe un método análogo, llamado regla del paralelogramo, el cual usted debe describir.
b. Método algebraico: Dados los vectores de
E
n,A
=
a a
1, ,...,
2a
n y=
1, ,...,
2 nB
b b
b
, el vectorA B
+
está dado por:+ =
1+
1,
2+
2,...,
n+
nTeorema 2.1
V
*,
+
es un grupo abeliano. Este enunciado es equivalente a decir que la adición de vectores es una OBI* y que cumple las siguientes propiedades :
Para todo
A
,B
,C V
*:a. Conmutativa:
A B B A
+ = +
.b. Asociativa:
A B C
+
(
+
) (
=
A B C A B C
+
)
+ = + +
.c. Neutro:
A
+ = + =
0 0
A A
, siendo0
el vector nulo.d. Inverso:
A
+ −
(
A
) 0
=
de donde−
A
es el inverso deA
.Demostración de la propiedad b. para vectores en
E
3 SeanA
=
a a a
1, ,
2 3,
B
=
b b b
1, ,
2 3,
C
=
c c c
1, ,
2 3Entonces
(
A B
+
)
+ =
C
a a a
1, ,
2 3+
b b b
1, ,
2 3
+
c c c
1, ,
2 3+
+ =
1+
1 2+
2 3+
3+
1 2 3(
A B C
)
a
b a
,
b a
,
b
c c c
, ,
por suma de vectores+
+ =
1+ +
1 1 2+ +
2 2 3+ +
3 3(
A B C
)
a
b c a
,
b
c a
,
b
c
por suma de vectores+
+ =
1+
1+
1 2+
2+
2 3+
3+
3(
A B C
)
a
(
b c a
),
(
b
c a
),
(
b
c
)
por propiedad asociativa en la suma de reales+
+ =
1 2 3+
1+
1 2+
2 3+
3
(
A B
)
C
a a a
, ,
b
c b
,
c b
,
c
(
A B C A B C
+
)
+ = +
(
+
)
Teorema 2.2
La desigualdad triangular:
Para todo
A
,B V
*,A B
+
A
+
B
Actividad en clase: Demostrar el teorema 2.2.
La existencia de inversos permite definir la diferencia de vectores: para todo
A
,*
B V
:
A B A
− = + −
(
B
)
Es decir, la diferencia entre
A
yB
es la suma deA
y el inverso deB
.a. En forma geométrica si
P P
0 1 es el segmento dirigido que representa aA
y0 2
P P
el segmento que representa aB
, entonces el segmento dirigidoP P
2 1 representa aA B
−
.P1
P2
P0
A A-B
B
Figura 2.4. Diferencia de vectores
b. En forma algebraica, si
A
=
a a
1, ,...,
2a
n yB
=
b b
1, ,...,
2b
n entonces− =
1−
1,
2−
2,...,
n−
nTeorema 2.3
A partir de las propiedades de grupo abeliano de
V
*,
+
se obtienen las siguientes propiedades de la diferencia.Para todo
A
,B V
*
se cumplen:a.
− +
(
A B
)
= − −
A B
b. si
A B
=
entonces− = −
A
B
c.
0
− = −
A
A
d.
A
− =
0
A
La adición de vectores permite obtener las componentes de un vector en
E
n del cual se conocen las coordenadas de su punto inicial y de su punto final. Si V es un vector cuyo punto inicial esP
1=
( , ,..., )
x x
1 2x
n y cuyo punto final es=
2
( , ,..., )
1 2 nP
y y
y
entonces los vectores de posición deP
1 yP
2 son,respectivamente,
OP
1=
x x
1, ,...,
2x
n yOP
2=
y y
1, ,...,
2y
n Por adición de vectores,
OP PP OP
1+
1 2=
2 de donde se obtiene que
PP OP OP
1 2=
2−
1 es decir,
PP
1 2=
y
1−
x y
1,
2−
x
2,...,
y
n−
x
nIlustración:
Si
P
1=
(3,4, 2,5)
−
yP
2=
(1, 7,4,8)
−
, son dos puntos deE
4, el vectorPP
1 2 es,=
−
= − −
1 2 2 1
2, 11,6,3
2.2.3 Producto de un vector por un escalar
Se define una operación binaria externa en vectores por medio de así: Para todo
a
y todoA V
*el producto dea
yA
es el vectoraA
.a. En sentido geométrico
aA
tiene las siguientes características,•
aA
=
a A
, dondea
representa al valor absoluto dea
.•
aA
tiene la misma inclinación queA
y su sentido concordante o discordante conA
segúna
sea positivo o negativo.En la fig. 2.5 se ilustran los vectores
A
,3
A
y−
2
A
.A
3A
-2A
Figura 2.5. Producto de un vector por un real
Teorema 2.4
Para todos
A
,B V
*
y todosa
,b
, se cumplen:a.
(
a b A aA bA
+
)
=
+
b.
a A B
(
+
)
=
aA aB
+
c.( )
ab A a bA
=
( )
d.
1
A A
=
y−
1
A
= −
A
e.0
A
=
0
ya
0 0
=
Con estas propiedades {V*,+,
aA
} es un espacio lineal real.Actividad para el estudiante: Probar estas propiedades e ilustrarlas gráficamente.
Al vector
aA
se le llama múltiplo escalar deA
, de donde resulta obvio que dos vectores son paralelos si y sólo si uno es múltiplo escalar del otro.Con esta idea en la mente, el vector
A
A
es paralelo aA
por medio del escalar1
A
siA
0
. Este vector se representa porU
A y se denomina vector unitario enla dirección de
A
.Actividad en clase: Probar que el vector
U
AA
A
2.2.4 Ejercicios
Ejercicios básicos.
1. Dados los vectores de
E
3,U
=
6, 2,5
−
,V
=
3,0,5
yW
=
2,4, 9
−
, hallea.
U V
+
b.
U
+
V
c.
U V
−
+
W
d.
−
3
U
+
3
U
e.3
U
−
5
V
+
4
W
f.
W
W
g.
W
W
h.
2
U W
V
2. Halle escalares
a
yb
tales quea.
a
,3
=
2,
a b
+
b.4,
b
=
a
2,3
c.a a b
,
+ = −
b
2,6
d.
a b
−
,2,
−45=
3,
a b ab
+
,
3. Si el punto inicial del vector
X
= −
2,4, 1
−
esP
(2, 1,4)
−
, halle su punto final. Si el punto final del vectorY
=
2,0,7
esQ
(2,0, 7)
−
, halle su punto inicial.tiempo. Halle el desplazamiento de la partícula en el intervalo de tiempo
1,7
. 5. Demuestre que la suma de los cuadrados de los cosenos directores de un vector enE
nes igual a la unidad.6. Halle los cosenos directores de los vectores
a.
A
= −
1,1,1
b.B
=
7, 3, 5
− −
c.C
=
1,2,9, 3,5
−
7. Para qué valores de
t
en reales los vectoresA
= −
t t t
, ,
−
1
yB
=
t
,10 ,6
+
t
deE
3 tienen un ángulo
entre ellos.8. Dados los puntos
A
=
(3, 1,6)
−
yB
=
(5,4,2)
deE
3, halle las coordenadas de un punto C tal queAC
sea el dobleAB
yB
esté entreA
y C.9. Determine un vector de
E
3 cuya magnitud sea igual a la deA
=
7, 5,12
−
y cuya dirección sea la deB
= −
6,9, 10
−
.10. Usando vectores verifique que los puntos de
E
2(4, 2)
−
,(10,8)
,( 6,5)
−
y(0,15)
son los vértices de un paralelogramo.11. Un vector de
E
3 tiene magnitud2
y dirección de modo que su ángulo con el ejex
es
3
y con el ejey
es
4
, halle las componentes del vector.12. Demuestre que si
A
1=
x y
1,
1 yA
2=
x y
2,
2 son vectores deE
2, entonces1
A
es paralelo aA
2 si y solo six y
1 2−
x y
2 1=
0
.Ejercicios avanzados
1. Sean
A
,B
y C puntos colineales. SiC
divide al segmentoAB
en una razóna
b
, es decir=
AC
a
CB
b
, demuestre quebOA aOB
OC
a b
+
=
+
siendoO
un puntoexterior a la recta.
2. Halle para qué valores reales de
t
yu
, los puntosP
1(2,3)
,P
2(1 ,1
+
t
+
u
)
y3
(2 ,2 )
P t u
son colineales.3. Usando vectores demuestre que el baricentro de un triángulo divide cada mediana en la relación
2:1
.4. Si
A
=
(2,5)
,B
= −
( 1,3)
yC
=
(7,4)
son tres vértices de un paralelogramo de2
E
, usando vectores halle las coordenadas del cuarto vértice (dos respuestas)5. Pruebe que si
a b c
, ,
no son todos nulos, los vectoresA
=
a b c
, ,
y=
, ,
B
ka kb kc
tienen la misma dirección sik
0
y dirección contraria sik
0
(
k
).6. Halle un vector de
E
4 que tenga su punto inicial en el punto medio del segmento entre los puntos(2,5,0, 4)
−
y( 6,7, 2,2)
−
−
y su punto final en el punto final del vector de posición1,2, 3,8
−
.2.3 CONCEPTOS DEL ÁLGEBRA LINEAL.
2.3.1 Dependencia lineal
Definición 2.5
Dado un conjunto de vectores
A A
1, ,...,
2A
r de V* y un conjunto de números reales
ii
=
1,...,
r
se llama vector combinación lineal (C.L) de losA
i1,...,
i
=
r
a cualquier vector obtenido como1 r
i i i
A
=
para cualquier conjunto devalores de los
i.De otro modo, un vector combinación lineal es la suma de múltiplos escalares de los
A
i,i
=
1,...,
r
. Los
ise llaman componentes escalares de la combinación lineal y losA
i componentes vectoriales.Ilustración:
Dados los vectores
A
=
1,2,3
,B
=
4, 3, 1
− −
,C
= − −
5, 3,5
yD
= −
2,1,6
.a. Una combinación lineal de
A B C
, ,
yD
es−
3,4, 22
−
=
2
A
−
3
B C
+ −
6
D
b. El vectorD
se puede escribir como combinación lineal deA B
,
y C como141
16
67
129
129
129
D
=
A
−
B
+
C
El vector nulo puede expresarse como C.L. de cualquier conjunto de vectores. Lo más simple es que
0 0
=
A
1+
0
A
2+
...0
A
r , la cual se denomina C.L. trivial.Definición 2.6
Dado un conjunto de vectores
S
*=
A A
1, ,...,
2A
r
deV
* ; si ocurre que lacombinación lineal
1
0
r i i i
A
=
=
se da únicamente en el caso trivial, es decir,cuando todos los
i=
0
entonces se dice que losA
i son linealmente independientes (L.I) o queS
*es libre o que los vectores son libres. Pero si ocurre que la C.L. se presenta para el caso no trivial (o sea sin que todos los
i tengan que ser0
) entonces losA
i son linealmente dependientes (L.D) o el conjunto*
S
es ligado o los vectores son ligados entre si.Ilustración: Se puede verificar que los vectores de
E
3A
=
1,3, 2
−
,B
=
3,1,1
yC
=
5, 1,4
−
son L.D ya que existen escalaresa b
,
yc
diferentes de cero tales queaA bB cC
+
+
=
0
.Una de las infinitas posibilidades es que
a
= −
2,
b
=
4
yc
= −
2
. Efectivamente2
A
4
B
2
C
0
−
+
−
=
.El lector deberá encontrar otra solución.
Notas:
a. Hay que tener muy en cuenta que un conjunto de vectores es L.I si y sólo si la
única CL que produce el vector nulo es la trivial.
b. Un conjunto de vectores debe o bien ser L.I o bien L.D pues estos son eventos mutuamente excluyentes.
c. Si
S
*=
A
yA
0
, entoncesS
*es libre.Actividad en clase: Justificar las proposiciones c. y d.
Teorema 2.5
a. Dos vectores son paralelos si y sólo si son L.D.
b. Dos vectores son no paralelos si y sólo si son L.I.
c. Tres vectores son coplanares si y sólo si son L.D. d. Tres vectores son no coplanares si y sólo si son L.I.
Actividad en clase: Demostrar algunos de estos enunciados
Teorema 2.6
a. Un conjunto
S
*de vectores es L.D si y sólo si al menos un vector de*
S
puede expresarse como CL del resto de vectores deS
*.b. Un conjunto
S
*=
A A
1, ,...,
2A
m
de vectores deE
nes L.D sim n
, esto equivale a decir que siS
*es libre entoncesS
*tienen a lo sumon
vectores.Demostración del teorema 2.6 a.
Como este teorema es un bicondicional, demostremos uno de los condicionales: Si el conjunto
S
*=
A A
1, ,...,
2A
n
es un conjunto de vectores L.D, al menos un vector es C.L. del resto.Por la definición de vectores L.D:
1 1
A
2A
2...
nA
n0
+
+ +
=
con al menos un
i
0
Sin perder generalidad hagamos
1
0
, entonces por operaciones con vectores:2 3
1 2 3
1 1 1
...
nn
A
A
A
A
Sustituyendo los
+−
11
i por
,
=
2,3,...,
j
j
n
nos queda:1 2 2 3 3
...
n nA
= −
A
−
A
− −
A
, lo cual nos dice que unA
i deS
*se puedeexpresar como C.L de los restantes vectores.
2.3.2. Ejemplos
Si {
A B C
, ,
} es un conjunto de vectores L.I, pruébese que {A B A C B C
+
,
+
,
+
} también es L.I.Solución:
Acudiendo a la definición de vectores L.I, se debe cumplir que:
1
(
A B
)
2(
A C
)
3(
B C
) 0
+
+
+
+
+
=
solo si
1,
2y
3son cero.Por las propiedades de espacio vectorial de
V
*1
A
1B
2A
2C
3B
3C
0
+
+
+
+
+
=
También,
(
1+
2)
A
+
(
1+
3)
B
+
(
2+
3)
C
=
0
y comoA B
,
y Cson L.I, entonces
1+
2=
0
1+
3=
0
2+
3=
0
Solución:
Dos vectores L.D son paralelos, entonces se debe cumplir que
=
+
−
,
,
a b
k a b a b
porque dos vectores son paralelos si uno es múltiplo escalar del otro.De ahí que
a k a b
=
(
+
)
yb k a b
=
(
−
)
.De la primera ecuación
k
a
a b
=
+
a
−
b
, reemplazando en la segunda(
)
a
b
a b
a b
=
−
+
;2 2
2
0
a
− −
b
ab
=
a b
=
(1
2)
que es la condición pedida.2.3.3 Base de un En
Definición 2.7
Se llama base de
E
n a un conjuntoB
* no vacío que cumple que:a.
B
* tiene exactamenten
vectoresb. Los vectores de
B
* son L.I.De este modo cualquier vector de
E
n es una CL de los elementos deB
*. En álgebra lineal esto se expresa diciendo queB
* es un generador deE
n o que*
B
genera aE
n.Teorema 2.7
Definición 2.8
Se llama la base canónica de
E
n al conjuntoB
*=
U U
1, ,...,
2U
n
donde=
=
=
1
1,0,...,0 ,
20,1,...,0 ,...,
n0,0,...,1
U
U
U
La base canónica es la base más simple y más usada de un
E
n.En el caso particular de
E
2, la base canónica es
i j
,
coni
=
1,0
yj
=
0,1
.Como vectores de posición
i
yj
van asociados a los ejes coordenadosx
yy
(figura 2.6). Cualquier vector
x y
,
deE
2 se puede escribir como CL dei
yj
:=
+
V xi y j
X
Y P(x,y)
i
yj j
xi V
V=<x,y>=xi+yj
Figura 2.6. Base canónica en E2
Los vectores
xi
yy j
se llaman componentes ortogonales deV
.En
E
3, la base canónica es
i j k
, ,
siendoi
=
1,0,0
,j
=
0,1,0
y=
0,0,1
k
, los cuales van asociados a los ejesx y
,
yz
cuando se toman comovectores de posición. Todo vector
x y z
, ,
deE
3 es una CL dei j
,
yk
:=
+
+
z
zk
xi
xi+yj Y
X
i j
k V
yj
V=<x,y,z>=xi + yj + zk
Figura 2.7. Base canónica en E3
, ,
xi y j zk
son las componentes ortogonales deV
.2.3.4. Ejemplos
1. Pruebe que
B
*=
1,3 , 2, 1
−
es una base deE
2. Solución:i) Basta probar que los vectores son L.I, es decir que
11,3
+
22, 1
− =
0,0
tiene como única solución que
1=
2=
0
. Esto resulta evidente a simple vista pues los vectores no son paralelos ya que no son múltiplos escalares.ii) Podemos verificar que
B
* genera aE
2 lo que equivale a que
11,3
+
22, 1
− =
x y
,
tiene solución para cualquierx y
,
.Efectivamente:
1+
2
2=
x
3
1−
2=
y
de donde 1
2
7
x
y
=
+
y 23
7
x y
2. Pruebe que
B
*=
3,0,5 , 1,4,2 , 7, 3,4
−
−
es una base deE
3. Solución:i) Para probar que
B
*es libre, se plante la CL igual al vector nulo:
13,0,5
+
2−
1,4,2
+
37, 3,4
−
=
0,0,0
de aquí se obtiene:
3
1−
2+
7
3=
0
4
2−
3
3=
0
5
1+
2
2+
4
3=
0
al resolver este sistema para
1,
2y
3 se encuentra que que
1=
2=
3=
0
es la única solución lo que significa que los vectores son L.I.ii) Podemos verificar qque
B
*genera aE
3 ale establecer la CL para cualquier vectorx y z
, ,
deE
3=
+ −
+
−
, ,
3,0,5
1,4,2
7, 3,4
x y z
a
b
c
lo que equivale a:
x
=
3
a b
− +
7
c
y
=
4
b
−
3
c
z
=
5
a
+
2
b
+
4
c
la solución de este sistema para
a b
,
yc
arroja que
22
18
25
59
x
y
z
a
=
−
−
+
15
23
9
59
x
y
z
b
=
+
−
20
11
12
59
x
y
z
Es decir que
a b
,
yc
existen para cualquier valor dex y
,
yz
, por lo tanto se puede encontrar la CL deB
*para cualquier vector deE
3. Por ejemplo, para1,1,1
a
=
−5915,
b
=
2959,
c
=
1959En efecto:
1,1,1
=
−5915
3,0,5
+ −
29591,4,2
+ −
19597, 3,4
3. Dado el conjunto de vectores de
E
2B
*= − −
1, 1 , 2,2 , 1,1
−
a) Verifique si
V
*es una base deE
2.b) Exprese el vector
−
1,1
como una combinación lineal deB
*de modo que la suma de los soportes escalares de la combinación lineal sea 1.Solución:
a)
B
*no puede ser una base deE
2 ya que contradice la definición 2.7 que dice que una base deE
n tienen
vectores.b) Aunque
B
*no sea base es posible expresar el vector−
1,1
como C.L. deB
*. Con la condición dada.−
1,1
= − − + −
a
1, 1
b
2,2
+
c
1,1
Con
a b c
+ + =
1
De esto se obtiene el sistema
− −
a
2
b c
+ = −
1
(1)− +
a
2
b c
+ =
1
(2)a b c
+ + =
1
(3)Definición 2.9
Dada una base de
E
n,B
*=
B B
1, ,...,
2B
n
:a) Si ocurre que los elementos de
B
*son ortogonales entre si, entonces se dice queB
*es una base ortogonal.b) Si los elementos de
B
*son vectores unitarios, es decirB
i=
1
para1,2,3,...,
i
=
n
, entonces se dice que la base está normalizada.c)
B
*es una base ortonormal si cumple las dos condiciones anteriores.La base canónica definida antes es el ejemplo más claro de una base ortonormal.
2.3.5 Ejercicios
1. Sean los vectores de posición de los puntos
P P
1,
2 yP
3 enE
2,OP
1= +
2
i
3
j
,=
+
2
4
OP
i y j
yOP
3=
5
i
. Halle analíticamente el valor dey
de modo que1
,
2P P
yP
3 sean colineales.2. En cada caso verifique si el conjunto de vectores dados es L.I. o L.D.
a.
A
*=
1,3 , 2,8
b.
B
*= −
6,4,2 , 5, 3,16
−
c.
C
*= −
3,7,12 , 6,1, 5 , 3,1,0
−
d.
D
*=
1,3, 1 , 6, 2,5 , 5, 5,6
−
−
−
e.
E
*=
1,2,3,4 , 0,1,3,7 , 2,0, 1,10
−
3. En cada caso verifique si el conjunto dado es una base de
E
n:b.
B
*=
1,2,3 , 3,2,1 , 2,3,1
enE
3c.
B
*=
1,1,2 , 2,2,3 , 3,3,3
enE
3d.
B
*=
5,3,1 , 1,0, 1 , 7,3, 4
−
−
−
enE
34. Si
A B
,
es una base deE
2, muestre que
A B kA
,
+
también es una base deE
2 para cualquier escalark
.5. Dados los vectores de
E
3A
=
1,1,4
,B
=
1, 1,0
−
yC
=
0,2, 2
−
, demuestre que son L.I. y expresar el vectorD
=
3,5,2
como su combinación lineal.6. Dados los vectores de
E
3:A
=
1,2,3
,B
=
4, 3, 1
− −
,C
= − −
5, 3,5
,= −
2,1,6
D
Halle:
a.
D
como combinación lineal deA B
,
y C.b.
A
como combinación lineal de3 y 2
B
D
.c.
C
como combinación lineal deA B D A
+
,
−
yA D
+
.d. Escalares
a
yb
tales quea A B
(
+
)
+
b C D
(
+
) 0
=
7. Pruebe que si
A
,B
,C V
* son L.I., entoncesa. Los vectores
A
+
2
B C A
+
,
+
3
B
−
2
C
yA B
+ +
4
C
son L.D.b. Los vectores
A B A C
+
,
−
yB C
+
son L.I.8. . Sean
A
=
1,1,1 ,
B
=
0,1,1
yC
=
1,1,0
vectores deE
3a. Muestre que
A B
,
y C son L.I.b. Halle un vector
D
tal queA B
,
yD
sean L.D.10. Pruebe que el vector nulo no puede ser parte de una base de
E
n.11. Pruebe que si
m
+
1
vectores deE
n son L.I, entoncesm
vectores de estos también son L.I y que sim
vectores son L.D entoncesm
+
1
también son L.D.12. Sean
A
=
1, 1,2 ,
−
B
=
3,1, 4
−
yC
=
2, 3, 1
− −
. ¿Será posible expresar aA
como C.L deB
y C?13. ¿Para qué valores de
, los vectoresA
=
1, , 1 ,
−
B
=
2 ,5,3
y
=
4 ,1,0
C
son L.I.?, ¿y L.D?13. Halle el valor de
t
para que en cada caso el conjunto de vectores sea L.D: a)
2, 7 , , 3
−
t
−
b)
2,1,0 , 3, 5,2 , 1,4,
−
t
2.4 OTRAS OPERACIONES CON VECTORES
2.4.1 Ángulo entre dos vectores
Para determinar el ángulo entre dos vectores de
E
n no paralelos y diferentes del vector nulo, se hacen coincidir sus puntos iniciales. El ángulo es entonces el de menor medida que forman las rectas que contienen a los dos vectores.Teorema 2.8
cos( )
1n i i i
x y
A B
=
=Actividad en clase: Probar el teorema anterior en
E
2.Ilustración: El ángulo entre los vectores de
E
3A
=
7,3,5
yB
= −
2,4,1
es
=
−
− +
+
1
14 12 5
cos
83 21
=
−
=
1
3
cos
85.9
1743
2.4.2 Producto interior de vectores
A continuación se va a definir una operación binaria entre vectores que da como resultado un escalar. Esta operación se conoce como producto interior o producto punto euclidiano o bien producto escalar.
Definición 2.10
Sean dos vectores de
E
n,A
=
x x
1, ,...,
2x
n yB
=
y y
1, ,...,
2y
n . El producto interior deA
yB
es el número real simbolizadoA B
•
y definido como:1 1 2 2
1
...
n
i i n n
i
A B
x y
x y
x y
x y
=
• =
=
+
+ +
Si
A
=
0
óB
=
0
,A B
• =
0
La expresión anterior se conoce como la forma geométrica del producto interior y establece que este producto es invariante respecto al sistema de referencia ya que el resultado es el mismo aunque se cambie el sistema de referencia o, inclusive, aunque no haya ninguno, es decir, el producto interior se puede obtener para todo par de vectores
A
,B
deV
*Teorema 2.9
El producto interior cumple las siguientes propiedades para todo
A
,B
yC V
* y todo escalarr s
,
:a. Simetría:
A B B A
• = •
b. Bilinealidad: esta propiedad incluye dos partes, i)
A B C
•
(
+
)
= • + •
A B A C
(
A B C A C B C
+
)
• = • + •
ii)
r A B
(
•
)
=
rA B A rB
• = •
c. Positividad definida:
A A
•
0
yA A
• =
0
sólo siA
=
0
d.A
• =
0 0
e.
( ) ( )
rA
•
sB
=
rs A B
(
•
)
Actividad en clase: Demostrar algunas de estas propiedades.
Teoremas 2.10
A partir de la definición y las propiedades del producto interior se puede concluir que:
b. Si
A
0
yB
0
entoncesA B
• =
0
si y sólo siA
yB
son perpendiculares.c.
A B
•
A B
. Esto se conoce como la desigualdad de Cauchy-Schwarz. d. SiV
=
x x
1, ,...,
2x
n es un vector deE
n−
0
y
U U
1, ,...,
2U
n
es la basecanónica de
E
n entonces los cosenos directores deV
están dados comocos( )
ii
V U
V
=
•
Actividad en clase: Demostrar este teorema.
El significado físico más simple del producto interior se relaciona con el trabajo mecánico realizado por una fuerza
F
que desplaza un objeto en línea recta un
r
. El trabajo de esta fuerza esT F
= •
r
Nota: Con la definición de producto punto una base
B
*=
B B
1, ,...,
2B
n
deE
nes ortonormal si se cumple:
0
1
i jB B
•
=
i j
i j
=
Ejemplos
1. Usando el producto interior pruebe que si
a
yA V
*entoncesaA
=
a A
Solución:
=
a A A a A
• =
.2. Demuestre la desigualdad triangular: para todo
A
,B V
*A B
+
A
+
B
Solución:Del teorema 2.10 a),
A B
+
2=
(
A B
+
) (
•
A B
+
)
por propiedad de bilinealidad,
= • + • + • + •
A A A B B A B B
Por propiedad de la simetría,= • +
A A
2(
A B
•
)
+ •
B B
y de nuevo el teorema 2.10 a),
=
A
2+
2(
A B
•
)
+
B
2 por la desigualdad de Cauchy-Schwarz(
)
+
2=
2+
•
+
2
2+
+
22
2
A B
A
A B
B
A
A B
B
Es decir,
A B
+
2
(
A
+
B
)
2 comoA B
+
yA
+
B
son números positivos,
A B
+
A
+
B
.3. Dados
A
,B
yC V
*−
0
de modo queA B
⊥
yA C
⊥
, demuestre queA
es perpendicular a
B
+
C
para todo
y
.Solución:
Puesto que
A B
⊥
yA C
⊥
se cumple que0
A B
• =
yA C
• =
0
Ahora, si el producto interior entre
A
y
B
+
C
es cero, estos vectores son perpendiculares, por tanto(
)
(
)
(
)
(
) 0
A
•
B
+
C
=
independiente de que valores tomen
y
y la proposición queda demostrada.2.4.3 Vector proyección
Un significado del producto interno lo da la proyección de un vector sobre otro. Definición 2.11
Sean
A B V
,
*−
0
dos vectores no paralelos y
el ángulo entre ellos. SiA
yB
tienen el mismo punto inicial, se llama vector proyección deA
sobreB
, escritoP
A B, al vector cuyo punto inicial es el punto inicial común y cuyo punto final es el pie del segmento perpendicular trazado desde el punto terminal deA
a la recta que contiene aB
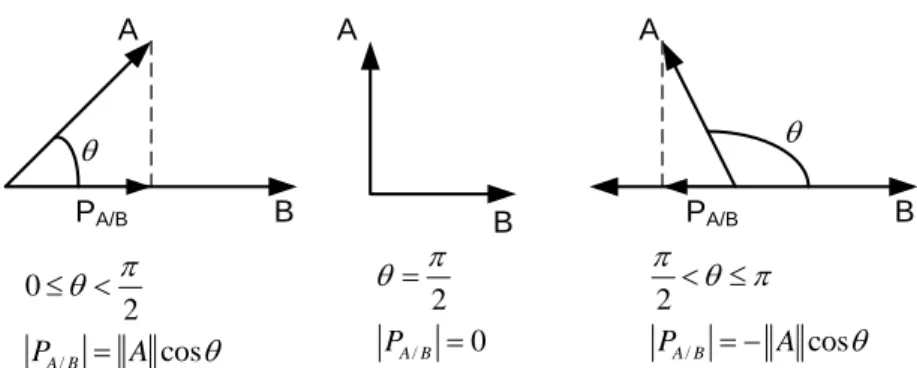
.Según sea el ángulo entre
A
yB
se pueden presentar 3 situaciones que se ilustran en seguida: A B A A
B PA/B B
PA/B / 0 2 cos = A B
P A /
2 0 A B P = = / 2 cos = − A B P A
Figura 2.8. Proyección de un vector en otro
Teorema 2.11
2
(
)
A BA B
P
B
B
•
=
Demostración:
T
N
D
M
Figura 2.9. Teorema 2.12
Sean
MN B
=
MT A
=
MD P
=
A B es la proyección ortogonal deA
sobreB
DT C
=
P
A B=
B
con
−
0
(1) por serP
A B yB
paralelos ComoB
y C son ortogonales,B C
• =
0
(2)
A MD TD
=
+
=
B C
+
(3) por suma de vectoresC A
= −
B
(4)
B A
•
(
−
B
) 0
=
(5) Al reemplazar (4) en (2)B A
• −
(
B B
•
) 0
=
(6) Por bilinealidad
A B
2B
=
•
(8)
P
A BA B
2B
B
=
(9) al reemplazar (8) en (1)Al número real dado por
A
cos( )
se le denomina proyección escalar deA
sobreB
. De este modo se puede decir queA B
•
es el producto entre la proyección escalar deA
sobreB
y el módulo deB
o entre la proyección escalar deB
sobreA
y el módulo deA
.Ejemplo
Dados
A
=
1,2,3
yB
=
4,5,6
vectores deE
3, exprese el vectorA B
+
como CL deP
A B yP
B A .Solución:
Del teorema 2.11,
P
A B(
A B
2)
B
B
•
=
yP
B A(
A B
2)
A
A
•
=
la combinación lineal queda:
A B rP
+ =
1 A B+
r P
2 B A conr
1 yr
2
r
1(
A B
2)
B r
2(
A B
2)
A
B
A
•
•
=
+
Para que esta ecuación sea cierta,
(
A B
)
1
con lo que,
=
=
•
21
77
32
B
r
A B
Y
=
=
•
22
14
32
A
r
A B
y así:
77
14
32
A B32
B AA B
+ =
P
+
P
2.4.4 Producto vectorial
El producto vectorial, también llamado producto exterior o producto cruz, tiene importantes aplicaciones en la mecánica en tres dimensiones. Esta operación es específica para vectores en tres dimensiones y no se generaliza en forma natural para dimensiones mayores.
Definición 2.12
Sean
A
=
x y z
1, ,
1 1 yB
=
x y z
2, ,
2 2 vectores deE
3 ; el producto vectorial deA
yB
es una operación binaria interna que se representaA B
y se define como:
A B
=
y z
1 2−
y z x z
2 1,
2 1−
x z x y
1 2,
1 2−
x y
2 1Nota:
=
1 1 1=
1 1−
1 1+
1 12 2 2 2 2 2
2 2 2
i
j
k
y
z
x
z
x
y
A B
x
y
z
i
j
k
y
z
x
z
x
y
x
y
z
=
(
y z
1 2−
y z i
2 1)
+
(
x z
2 1−
x z j
1 2)
+
(
x y
1 2−
x y k
2 1)
Teorema 2.12
El producto vectorial cumple las siguientes propiedades: Para todo
A B
,
yC E
3 y todo número reala b
,
,a. Anticonmutativa:
A B
= −
(
B A
)
b. Antiasociativa:A B C
(
) (
A B C
)
c. Distributiva respecto a la suma:
A B C
(
+
)
= +
A B A C
y(
A B C A C B C
+
)
= +
d.
a A B
(
) ( )
=
aA B A aB
=
( )
e.
aA bB ab A B
=
(
)
f.A A
=
0
g.
A
= =
0 0
A
0
Actividad para el estudiante: demostrar estas propiedades
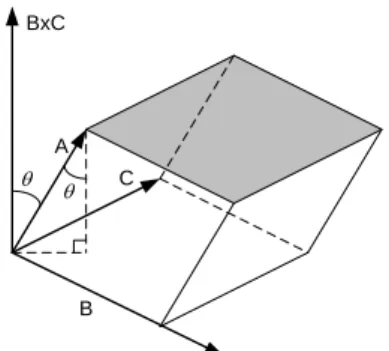
Se puede establecer que la forma geométrica del producto vectorial de dos vectores
A
yB
deE
3 tiene las siguientes características:b. El vector
A B
es perpendicular aA
y aB
y por ende al plano que determinan.c. El sentido de
A B
, de los dos posibles, lo da la regla de la mano derecha.AxB
B
A
Figura 2.10. Producto exterior de vectores
Además, con base en el producto vectorial es posible probar las proposiciones que se presentan en el siguiente teorema.
Teoremas 2.13
Si
A B E
,
3−
0
, entoncesa.
A B
da el área del paralelogramo queA
yB
determinan. b.A
yB
son paralelos si y sólo siA B
=
0
c.
A B
2=
A B
2 2−
(
A B
•
)
2 que se conoce como la identidad deLagrange.
Actividad en clase: probar las partes a y b de este teorema. La parte c se prueba en seguida.
Ejemplos