U
NA APLICACIÓN DE LAS SERIES DE TIEMPO
VISTO DESDE LOS ESPACIOS DE
H
ILBERT
.
E
RIKA
V
ALERIA
R
IVERA
J
IMENEZ
D
IRECTOR
: L
UIS
F
ERNANDO
V
ILLARRAGA
P
OVEDA
Universidad Distrital Francisco José de Caldas
Bogotá D.C.
Agradecimientos
Índice general
Introducción IV
1. Preliminares 1
1.1. Motivación . . . 1
1.2. Espacio de HilbertL2(Ω,F,P) . . . 2
1.2.1. Espacios de probabilidad . . . 2
1.2.2. Completitud del espacioL2(Ω,F,P) . . . 5
1.2.3. Aproximación lineal enL2(Ω,F,P) . . . 10
2. Modelos autorregresivos 12 2.1. Procesos estocásticos . . . 12
2.1.1. Procesos estacionarios . . . 14
2.1.2. Procesos autorregresivos (AR(1)). . . 19
3. Aplicación 26
3.1. Análisis series de tiempo . . . 26
3.1.1. Ejemplo . . . 27
4. Conclusiones 32
Apéndices 33
Introducción
Las series de tiempo surgen el siglo pasado gracias a los trabajos pioneros del matemáti-co A.N. Kolgomorov en 1931 (Anales matemátimatemáti-cos de la academia de ciencias alemana) y del estadístico británico George Yule (1871-1951) y su obra (On the time-correlation Problem, (1921)); donde promueven la investigación y las primeras aplicaciones basa-das en modelos autorregresivos de segundo orden, en base a los trabajos de Yule, el ma-temático y economista ruso Eugen Slutsky (1880-1948), integra una metodología, desde un punto de vista estocástico, fundamentando las series de tiempo y el análisis econó-mico de las mismas, desde unas bases estadísticas.
CAPÍTULO
1
Preliminares
1.1.
Motivación
Las series de tiempo han tenido un rol muy importante en el análisis y predicción de eventos, son una secuencia de datos, valores u observaciones, que se miden en diferen-tes momentos cronológicamente ordenados donde los datos pueden estar en intervalos de tiempo iguales o desiguales.
Existen modelos matemáticos de las series de tiempo que permiten la predicción, com-portamiento y comprensión de ciertos eventos que pueden utilizarse de diversas formas dependiendo del campo de aplicación particular como la economía, el marketing, la de-mografía y el medio ambiente, entre otros.
1.2.
Espacio de Hilbert
L
2(
Ω
,
F
,
P
)
El análisis de las series de tiempo es posible sin el estudio previo de los espacios de Hilbert. Pero, dada la relación que existe entre la geometría euclidiana y en particular con los conceptos de ortogonalidad y proyección ortogonal en espacios de dos y tres dimensiones. Daremos a conocer con el presenté trabajo el papel tan importante que tiene los espacios de Hilbert de dimensión infinita en el estudio de variables aleato-rias con segundo momento finito y en especial en la teoría de predicción de procesos estacionarios.
1.2.1.
Espacios de probabilidad
La teoría de la probabilidad es la parte de las matemáticas que se encarga del estudio de los fenómenos o experimentos aleatorios, se entiende por experimento aleatorio aquel que cuando se repite bajo las mismas condiciones iniciales, el resultado que se obtiene no siempre es el mismo,el espacio a trabajar consiste de una terna ordenada, denotada usualmente por (Ω,F,P), en dondeΩ es un espacio muestral,F es unaσ-álgebra de
subconjuntos deΩ, yPes una medida de probabilidad definida sobreF [Brezis, 2010, pág 89].A la pareja (Ω,F) se le llama espacio medible y a los elementos de F se les llama eventos o conjuntos medibles.
Como caso especial de σ-álgebra se tiene la σ-álgebra de Borel que esta generada por
la colección de conjuntos abiertos de un espacio topológico. Los miembros de esta σ
-álgebra son llamados conjuntos de Borel, para los espacios medibles(Ω,F)tendremos que si se le asocia una medida de probabilidadP, una funciónhdeΩsobreYconΩun espacio medible yYun espacio topológico será llamada unavariable aleatoriasíh−1(B) es un conjunto medible en Ω para cada conjunto abierto B en Y. La funciónh se dice medible deΩaYy se considera primeramente variables aleatorias correspondientes a (Y,G) = (Rd,Bd) y denotada con letras mayúsculas, por ejemplo X : Ω → Rd para d>1 yX :Ω →Rparad =1. Para variables aleatorias con valoresd>1 se les llamará vectores aleatorios.[Grigoriu, 2002, pág 8].
probabili-dad sobreΩentonces una funciónQdeG(σ-álgebra asignada al espacio topológicoY)
a[0, 1]sera llamada la probabilidad inducida porho la distribución dehsíQdefinido comoP(h−1(B))es una medida de probabilidad sobreYpara un conjunto abierto enG. Probar que efectivamenteQes una medida, es inmediato ya que:
Q(Y) = 1
Q(Y) =P(h−1(Y)) =P(Ω)
=1.
Aditividad contable.
Para cualquier conjunto contableI y disjunto de eventosBi ∈ G, se tiene,
Q [
i∈I
Bi
!
=P h−1 [
i∈I
Bi
!!
=
∞
∑
i=1
Q(Bi).
Dado queh−1(Bi)son eventos disjuntos enF.
Otra propiedad, dice que laσ-álgebra generada por una variable aleatoria Xes,
σ(X) = X−1(Bd) =
n
X−1(B) ∈F : ∀B∈ Bdo.
Y representa la más pequeñaσ-álgebra con respecto a la cualXes medible [Grigoriu, 2002,
pág 6]. La colección de subconjuntosσ(X)es unaσ-álgebra ya que:
X−1(Rd) = Ω y dado que Ω ∈ F entonces X−1(Rd) ∈ F, obteniendo asi, X−1(Rd)∈ σ(X).
SiB ∈Bd,
Se tiene queΩ∈ F yX−1(B) ∈ F, por tanto,X−1(Rd−B)∈ F, obteniendo asi, X−1(Rd−B) ∈ σ(X).
SeaBi∈ Bdconi =1, 2, ... , entonces,
X−1(B1∪B2∪...) = X−1(B1)∪X−1(B2)∪...
Se tiene queX−1(Bi) ∈F, por tanto,S∞i=1X−1(Bi) ∈ σ(X).
Además para estudiar el espacioL2es necesario hacer el estudio de lasvariables aleatorias simples que se definen como una función de valores reales definida en un espacio de medida cuyo rango es finito, estas funciones tienen un papel muy importante en la teoría de la medida y sobre todo en los espacios de probabilidad y en el estudio general de los espacios Lp [Rudin, 1981, pág 61], un ejemplo de variable aleatoria simple es la función característica, definida como
χAi =
1 si w∈ A
0 si w∈/ A
ya que siχ−A1
i (B) =
w: χAi(w)∈ B entonces
Si 0, 1 /∈ Bentoncesχ−A1
i(B) =.
Si 1∈ By 0 /∈ Bentoncesχ−A1
i(B) = A.
Si 1 /∈ By 0 ∈ Bentoncesχ−A1
i(B) = A
c.
Si 0, 1∈ Bentoncesχ−A1
i(B) =Ω.
Por tanto χ−A1
i(B) ∈ F, lo que implica que la función característica es una variable
aleatoria simple.
como: síX es una variable aleatoria simple tal que la norma dexies finita coni ∈ I, su
esperanza o valor esperado se define como
E[X] =
∑
i∈I
xiP(Ai).
y si la esperanza de una variable aleatoriaXexiste, esta es también denotada por
E[X] =
Z
ΩX dP.
1.2.2.
Completitud del espacio
L
2(
Ω
,
F
,
P
)
Sea(Ω,F,P)un espacio de probabilidad y denotamos por Lq(Ω,F,P)la colección de variables aleatorias X a valor real definidas sobre (Ω,F,P) tal que E[|X|q] < ∞ para q ≥ 1. SiXestá en Lq(Ω,F,P)se escribíraX ∼ Lq(Ω,F,P). Con q =2 es el caso rele-vante para las aplicaciones dado que está relaciona el calculo del segundo momento y la teoría de la estimación.
Consideramos el espacio L2(Ω,F,P) donde dos variables aleatorias X yY son estric-tamente iguales si para cada ω se cumple X(ω) = Y(ω). Existen, sin embargo, otras
formas más debíles de igualdad donde cambiaremos las variables aleatorias individua-les X ∈ L2 a clases de equivalencia de variables aleatorias que coinciden en casi toda parte definidas como,
[X] = nY∈ L2 : P(Y= X) =1o.
De tal forma, que se pueden cumplir satisfactoriamente las propiedades para queL2sea un espacio de Hilbert principalmente, se debe cumplir que la relación∼ definida por X ∼Y ⇐⇒ X c=.s Yes una relación de equivalencia y esto se tiene facilmente ya que, si se cumplen las relaciones
Reflexiva.
X ∼X ⇐⇒ P({ω : X(ω) 6=X(ω)}) = P() = 0.
Simetrica.
X ∼Y⇐⇒ P({ω : X(ω) = Y(ω)}) =1=P({ω :Y(ω) = X(ω)}).
Transitiva.
SiX ∼YyY ∼ZentoncesX ∼Z. Sea,P({ω : X(ω) = Y(ω)}
| {z }
A
) =1 YP({ω : Y(ω) =Z(ω)}
| {z }
B
) = 1, es decír,P(A) =1
yP(B) =1. Luego,
1 =P(A∩B) = P({ω : X(ω) = Z(ω)}) = P(X =Z).
Puesto que la intersección de dos conjuntos de probabilidad uno tiene probabili-dad uno, luegoX ∼Z.
Dicho lo anterior se probara que efectivamente sí(Ω,F,P)es un espacio de probabili-dad y se denotá porL2(Ω,F,P)el espacio de las clases de todas las variables aleatorias Xdefinidas enΩy que satisfacen la condición
E(X2) =
Z
ΩX
2(
ω) dP<∞.
Entonces con la notación usual de multiplicación por un escalar α ∈ R y la suma de
variables aleatorias,L2es un espacio vectorial. Además L2es un espacio de Hilbert con el producto internohX,Yi =E[X,Y]paraX,Y ∈ L2y la normakXkL
2 = E(X
2)1/2.
L2 sera un espacio vectorial, sí probamos, inicialmente que αX+βY con X,Y ∈ L2 y α,β∈ Rpertenecen aL2basta ver que,
k(X+Y)k2+k(X−Y)k2 =E((X+Y)2) +E((X−Y)2)
=E(X2) +2E(XY) +E(Y2) +E(X2)−2E(XY) +E(Y2) =2(E(X2) +E(Y2)).
Luego
E((X+Y)2) ≤2(E(X2) +E(Y2))<∞
Y por tantoX+Y∈ L2
Además,
obteniendo así queL2es un espacio vectorial.
Luego para que L2sea un espacio de Hilbert, se probara que hX,Yi = E[X,Y] cumple las propiedades de producto interno.
Por tanto,
1. hX,Yi=hY,Xi.
hX,Yi=E(XY) = E(YX) = hY,Xi
2. hX+Y,Zi =hX,Zi+hY,Zi.
hX+Y,Zi =E((X+Y)Z) = E(XZ+YZ) = E(XZ) +E(YZ) = hX,Zi+hY,Zi
3. hαX,Yi =αhX,Yi.
hαX,Yi =E(αXY) =αE(XY) =αhX,Yi
4. hX,Xi ≥ 0.
hX,Xi =E(XX) = E(X2) ≥0
5. hX,Xi =0 si y solo siXc=.s0.
Esta condición no se satisface en un sentido estricto. La condición se mantiene si no se distingue entre variables aleatorias que difieren sobre un conjunto de probabi-lidad cero. Teniendo en cuenta la relación de equivalencia definida anteriormente se tendrá,
⇐)SiX c=.s 0 y N = {ω ∈ Ω : X(ω) =0}tal que Nc = {ω ∈ Ω : X(ω) >0}con
P(Nc) =0.Por tanto,
hX,Xi =
Z
ΩX
2dP=Z
NX
2dP+Z
Nc X
2dP=
0.
⇒)SihX,Xi=RΩX2dP=0 y An ={ω ∈ Ω: X2(ω)> 1n}. Se tendra que,
X2(ω) ≥ 1
Z
ΩX
2dP≥ 1
n
Z
ΩχAn(ω)dP
Z
ΩX
2dP≥ 1
nP(An)
0≥ 1
nP(An)
Por tanto,P(An) = 0. Ahora sí,X=Sn∈NAn, obtendremos,
P({ω ∈ Ω: X(ω) 6=0}) = P(
[
n∈N
An) =
∑
n∈NP(An) =0.
Cumpliendo, la definición de dos variables aleatorias son iguales casi seguramen-te es decir,X c=.s Y, si y solo si P({ω : X(ω) 6=Y(ω)}) = 0 concluyendo,X c=.s 0.
Por último se necesita probar que si Xn ∈ L2 conn = 1, 2, ..., ykXn−Xmk → 0
cuan-do m,n → ∞, entonces existe X ∈ L2 tal que Xn converge casi seguramente a X, es
decir, L2 es completo. Para esto se necesita la proposición que afirma que si Xn ∈ L2y
kXn+1−Xnk ≤ 2−n,n = 1, 2, ..., entonces existe una variable aleatoria X en(Ω,F,P)
tal queXn → Xcon probabilidad uno [Brockwell, 2006, pág 62].
Para verificar la proposición, seaX0 =0 entoncesXn =∑nj=1(Xj−Xj−1)ahora∑∞j=1|Xj−
Xj−1|es finito con probabilidad uno, ya que, por el teorema de la convergencia
monó-tona [Rudin, 1981, pág 16],se tiene que l´ımn→∞∑nj=1|Xj−Xj−1| existe y es finito con
probabilidad uno.
E
∞
∑
j=1
|Xj−Xj−1| ! = Z X ∞
∑
j=1
|Xj−Xj−1|dP
=
Z
Xnl´ım→∞ n
∑
j=1
|Xj−Xj−1|dP
= l´ım
n→∞
Z
X n
∑
j=1
= l´ım
n→∞
n
∑
j=1 Z
X|Xj−Xj−1|dP
=
∞
∑
j=1
E|Xj−Xj−1||1|
≤
∞
∑
j=1
kXj−Xj−1k
=kX1k+
∞
∑
m=1
kXm+1−Xmk
≤ kx1k+
∞
∑
j=1
1 2j
<∞
Concluyendo, que siXn es una sucesión de Cauchy enL2entonces se podran encontrar
n1,n2, ..., tal quen1<n2<..., y
kXn−Xmk ≤ 2−k para n,m>nk
Por la proposición anterior, existe una variable aleatoria Xtal queXn → X con
proba-bilidad uno cuando n → ∞.Ahora dado e > 0, para m y n suficientemente grandes,
tendremos que kXm −Xnk < e luego por lema de Fatou [Rudin, 1981, pág 23], para
valores grande dem.
E[(Xm −X)2] = E[l´ım inf
n−>∞(Xm−Xn)
2]
≤l´ım inf
n→∞ E[(Xm−Xn)
2]
=l´ım inf
n→∞ kXm−Xnk
2
<e2.
De modo que l´ım supm→∞E[(Xm−X)2] <e2, y por tanto,Xm m.c
−→ X.
1.2.3.
Aproximación lineal en
L
2(
Ω
,
F
,
P
)
Se comenzara dando un ejemplo del uso del teorema de la proyección particularmente en espacios de Hilbert. El resultado general es entonces establecido más adelante. Para esto suponga queX1,X2yY son variables aleatorias en L2(Ω,F,P) donde, solamente
X1yX2son conocidas podríamos desear estimar el valor deYutilizando la combinación
linealYb =α1X1+α2X2la cual minimiza el error cuadrático medio,
S =E|Y−α1X1−α2X2|2 =kY−α1X1−α2X2k2.
el objetivo es encontrar un elementoYben el conjunto
M =nX ∈ L2(Ω,F,P) : X =a1X1+a2X2 para algún a1,a2∈ R o
cuya distancia cuadrada deY, kY−Ykb 2es tan pequeña como sea posible. Se esperaría
queYbtenga la propiedad queY−Ybsea ortogonal a todos los elementos deM, esto se
podría aplicar en casos más generales, que sera establecido en elteorema de la proyección. Aplicando esto a la estimación deYdescrita más arriba, se obtiene
hY−α1X1−α2X2,Xi=0 para todo X ∈ M (1.1)
o equivalentemente, por la linealidad del producto interior,
hY−α1X1−α2X2,Xii=0, i=1, 2.
Dada la definición del producto interior en L2, lo anterior puede quedar expresado en términos de la esperanza como,
α1E(X12) +α2E(X2X1) = E(YX1),
α1E(X1X2) +α2E(X22) = E(YX2),
del cualα1yα2se pueden encontrar.
x ∈ H [Bartle, 1995], entonces, hay un único elementobx∈ M tal que
kx−xkb = ´ınf
y∈Mkx−yk
yxb∈ M ykx−xkb =´ınfy∈Mkx−yksi y solo si xb∈ M y(x−bx) ∈ M
⊥.(El elemento
b
x es llamado la proyección de x sobre M). La demostración del presente teorema se puede ver en [Kreyszig, 1989]. Dado un espacio de Hilbert H, un subespacio cerrado
M, y un elemento x ∈ M, por el teorema de la proyección se muestra que el elemento deM más cercano axes el único elementoxb∈ M tal que
hx−xb,yi=0 para todo y∈ M (1.2)
Se interpretaraxb=PMxcomo la mejor predicción dexen el subespacioM.
El teorema de la proyección nos deja que xb = PMx está únicamente determinada por
esta condición para cualquier espacio de HilbertH y un subespacio cerradoM.
CAPÍTULO
2
Modelos autorregresivos
El modelo matemático para una serie temporal es el concepto de proceso estocástico supondremos que el valor observado de la serie en el instante t es una extracción al azar de una variable aleatoria definida en dicho instante, en consecuencia, una serie de ndatos será una muestra de un vector denvariables aleatorias ordenadas en el tiempo (z1, ...,zt, ...,zn).
2.1.
Procesos estocásticos
Se denomina proceso estocástico al conjunto de variables{zt},t=1...ny la serie
obser-vada se considera una realización o trayectoria del proceso [Peña Sanchez, 1995], más formalmente sea (Ω,F,P) un espacio de probabilidad, z = (zt,t ∈ T) una familia
de variables aleatorias definidas sobre (Ω,F,P) y con valores en un espacio medible (E,B).
{zt} es llamado un proceso estocástico con espacio muestral (Ω,F,P) espacio
Se debe tener en cuenta que sí Tes contable, entonces el proceso de tiempo es discreto mientras, que síTes un intervalo enR(T = [a,b],R+,R),{zt}es un proceso de tiempo
continuo. Por ejemplo, se quiere saber la cantidad de autos rojos vendidos en una agen-cia de autos en los próximos 6 meses, teniendo en exhibición 4 colores negro, rojo, gris y azul.[Coleman, 1986],donde el espacio muestral sera 0, 1, 2, 3, 4 que consideraremos una realización del proceso{zt},t =1, 2, .., 6, siendozt la variable aleatoria número de
autos rojos vendidos en lostmeses.
La forma probabilística de un proceso estocástico se conocerá si tenemos ladistribución conjunta de las n variables aleatorias {zt}, determinar prácticamente esta distribución
lleva consigo un buen número de realizaciones, para lograr simplificar esta determina-ción, se supone que la distribución conjunta es normal multivariante, ya que, entonces, quedará determinada por el vector de medias y la matriz de varianzas y covarianzas entre las variables [Peña Sanchez, 1995].
Para esto, una función del tiempo que proporciona las medias de las distribuciones mar-ginaleszt para cada instante:
µt =E[zt]
se le llamaráfunción de medias.
Lafunción de varianzasdel proceso proporciona las varianzas en cada instante temporal:
σt2 =Var(zt)
y se dira que el proceso es estable en la varianza si ésta es constante en el tiempo. La función que describe las covarianzas en dos instantes cualesquiera:
Cov(t,t+j) = Cov(zt,zt+j) = E[(zt−µt)(zt+j−µt+j)]
se le llamaráfunción de autocovarianza. A la estandarización de la función de covarianzas:
$(t,t+j) = Cov(t,t+j) σtσt+j
se le llamaráfunción de autocorrelación.
además, la estructura de dependencia lineal entre las variables aleatorias del proceso se representa por las funciones de covarianza y correlación.
En general, la función de autocorrelacion y autocovarianzas dependen de dos parame-tros(t,j), siendotel instante inicial yjel intervalo de observaciones.
Para poder estimar las características del proceso como medias, varianzas, entre otros a partir de su cambio en el tiempo es necesario suponer que las distribuciones de las variables en cada instante son estables a lo largo del tiempo. Obteniedo así el concepto de estacionaridad.
2.1.1.
Procesos estacionarios
Se dice que un proceso estocástico (serie temporal) esestacionario en sentido débilsi exis-ten y son estables la media, la varianza y las covarianzas, es decir, si para todot
1. µt =µ =cte
2. σt2 =σ2 =cte
3. Cov(t,t+k) =Cov(t,t−k) =γk k=0,±1,±2, ...
Para un proceso estacionario la función de autocorrelación se calcula mediante;
$k =γk/γ0
teniendo en cuenta que γ0 = σ2. Una propiedad importante de los procesos
estacio-narios es tener incrementos estacioestacio-narios; es decir, si zt es estacionario, el proceso ωt
definido por:
ωt =zt−zt−1
es también estacionario.
Media constante.
Varianza constante.
Teniendo en cuenta lo demostrado en el item anterior.
Var(ωt) = E[(ωt −µ)2]
=E[(zt−zt−1−µ)(zt−zt−1−µ)]
=E[−2ztµ+2zt−1µ−2(zt)(zt−1) +µ2] +E[z2t] +E[z2t−1]
=E[−2(zt)(zt−1)] +E[z2t] +E[z2t−1]
=−2Cov(zt,zt−1) +Var(zt) +Var(zt−1)
=2(σ2−γ1).
llamandoγa la covarianza entre observaciones contiguas.
Función de autocovarianza.
Cov(ωt,ωt+k) = E[(zt−zt−1)(zt+k−zt+k−1)] =2γk−γk+1−γk−2.
Un proceso estacionario muy importante es el ruido blanco, que se define como,
1. E[zt] = 0
2. Var(zt) = σ2
3. Cov(zt,zt−k) = 0, k =±1,±2, ...
Por ejemplo si tiramos una moneda en instantest = 1, 2, ... y definimos zt = −1 si se
obtiene cara y zt = +1 si se obtiene cruz, se obtiene un proceso de ruido ya que la
esperanza es cero, la varianza es constante, es decir, igual a uno y las covarianzas son cero [Peña Sanchez, 1995].
Los procesos estacionarios juegan un papel crucial en el análisis de series de tiempo además, muchas series de tiempo observadas no son estacionarias en apariencia. Con frecuencia, tales conjuntos de datos pueden ser transformados por ciertas técnicas, que razonablemente pueden modelarse como realizaciones de un proceso estacionario.
Método 1realiza una estimación por mínimos cuadrados demt.
Método 3es una diferenciación para generar datos estacionarios.
La teoría de procesos estacionarios se utiliza para el análisis, ajuste y predicción de la serie resultante. En todo esto la función de autocovariancia es una herramienta primaria.
Existe un modelo clasico de descomposición de un proceso estacionario que permite la posibilidad de representar los datos como una realización del proceso escrita:
zt =mt+st+Yt
dondemt es una función de cambio lento conocida comocomponente tendencia,stes una
función con el periodo conocido d conocido comocomponente estacionalyYt es una
com-ponente de ruido blancoque se sabe que es estacionario por lo definido anteriormente. El objetivo es estimar y extraer las componentes deterministicasmtystcon la esperanza
de que la componente residual o ruido blanco resultará ser un proceso aleatorio estacio-nario. Podemos utilizar la teoria de tales procesos para encontrar un modelo probabilis-tico satisfactorio para el proceso y analizar sus propiedades y utilizarlo en conjugación conmt yst con fines de prediccion modelización y analisis dezt.
Se usará en el presenté trabajo elmétodo 3, donde se intenta eliminar el término ten-denciamt mediante la diferenciación, definido el operador derivada con la notación∇
tal que
∇zt =zt−zt−1 = (1−B)zt
dondeBes el operador de desplazamiento hacia atras,
Bzt =zt−1.
y,
Para j=2,
∇(∇zt) = ∇((1−B)zt)
= (1−B)∇(zt)
= (1−B)(1−B)zt
= (1−2B+B2)zt
=zt −2zt−1+zt−2
Si el operador∇ se aplica a una función de tendencia linealmt = at+b, se obtiene la
función constante∇mt =a.
De la misma manera cualquier polinomio con tendencia de gradokpuede ser reducido a una constante por la aplicación del operador∇k.
Comenzando con el modelo zt = mt +Yt donde mt = ∑kj=0ajtj yYt estacionario con
media cero, se obtiene que
∇kzt =k!ak+∇kYt
un proceso estacionario con mediak!ak.
La técnica de diferenciación que aplicamos anteriormente a los datos no estacionarios se pueden adaptar para hacer frente a la estacionalidad del periodod introduciendo el operador de diferencia∇ddefinido por
∇d zt =zt−zt−d = (1−Bd)zt.
Aplicando el operador∇dal modelo
zt =mt+st+Yt
donde{st}tiene periododse obtiene
∇d zt =mt−mt−d+Yt−Yt−d
la cual da una descomposición del diferencial ∇d zt, en una componente tendencia
Para ver la utilidad del método de diferenciación, sea{Yt}un proceso estacionario con
media cero ya,bconstantes.
(a) Si zt = a+bt+st +Yt donde st es una componente estacional con periodo 12,
probaremos que
∇∇12zt = (1−B)(1−B12)zt
es estacionario.
Dado que muchas series no son estacionarias, pero existen métodos que transfor-man las series en procesos estacionarios el objetivo será estimar y extraer las com-ponentes mt yst de tal forma que la componente residual o ruido llegará a ser un
proceso aleatorio estacionario, por lo cual primero se aplica el operador diferencial para eliminar la componente de estacionalidad{st}de la serie de tiempo.
∇12zt =zt−zt−12
= (1−B12)zt
=a+bt+st+Yt−a−b(t−12)−st−12−Yt−12
=Yt+12b−Yt−12.
Ahora aplicando el diferencial para eliminar la componente de tendenciaa+bt.
∇∇12zt =∇
h
(1−B12)zt
i
= (1−B12)∇zt
= (1−B12)(1−B)zt
= (1−B−B12+B13)zt
=zt−zt−1−zt−12+zt−13
=Yt−Yt−12+Yt−13.
Obteniendo asi un residual o ruido que se sabe que es estacionario y centrado en cero.
12 probaremos que
∇212zt = (1−B12)(1−B12)zt
es estacionaria.
Aplicando diferenciación para eliminar la componente de estacionaridad.
∇12zt = (1−B12)zt =zt−zt−12
= (a−bt)st+Yt−(a+b(t−12))st−12−Yt−12
=Yt−(12b)st−Yt−12.
Por último, aplicando diferenciación para eliminar la componente de tendencia.
∇212zt = (1−B12)(1−B12)zt
= (1−B12−B12+B24)zt
=zt −2zt−12+zt−24
=Yt +2Yt−12+Yt−24.
Se obtiene aYt que es un proceso estacionario con media cero.
2.1.2.
Procesos autorregresivos (AR(1)).
Una clase muy importante de procesos estacionarios son los procesos autorregresivos, que resultan de imponer una dependencia entre las variables del proceso, similar a la de una ecuación de regresión.[Peña Sanchez, 1995].
La forma de dependencia más simple es relacionarzt conzt−1mediante la ecuación de
”autorregresion”
zt =c+φzt−1+at, |φ| <1 (2.1)
dondec y φson constantes a determinar y at es un proceso de ruido blanco,
indepen-diente dezt−kpara todo k positivo. El proceso (2.1) se denomina proceso autorregresivo
de primer orden o , brevemente, AR(1).
1. Si el proceso comienza con z0 = h, siendo h un valor cualquiera fijo, z1 = c+
φh+a1tendrá una distribución normal y lo mismo le ocurrirá azt para cualquier
tademás, sustituyendo sucesivamente y suponiendo c=0.
z1 =φh+a1
z2 =φ2h+φa1+a2
z3 =φ3h+φ2a1+φa2+a3
.
.
.
zt =φth+
t−1
∑
i=0
φiat−i.
tomando esperanzas, comoE[at] =0
E[zt] = φth
el proceso sólo puede ser estacionario si|φ| <1. Entonces, después de un periodo
transitorio incial, cuandot→∞,φt tenderá a cero.
2. Función de medias.Tomando esperanzas en 2.1 suponiendo que|φ|<1, de manera
queE[zt] = E[zt−1] =µ.
zt =c+φzt−1+at
E[zt] = E[c+φzt−1+at]
µ = E[c] +E[φzt−1] +E[at]
µ =c+φE[zt−1] +0
µ =c+φµ
µ = c
Llamandozt =zt−µ, el proceso puede escribirse en desviaciones a su media:
zt =φzt−1+at (2.2)
que es la expresión más usada del AR(1).
3. Función de varianzas.Comozt−1yatson independientes, llamandoσz2a la varianza
del proceso:
zt =c+φzt−1+at
V[zt] = V[c+φzt−1+at]
σz2 =V[c] +V[φzt−1] +V[at]
σz2 =0+φ2V[zt−1] +σa2
σz2 =φ2σz2+σa2
σz2 =
σa2
1−φ2
De nuevo apareciendo la condición|φ|<1 que es necesaria ahora para queσz2sea
finita y positiva.
4. Función de autocovarianzas.Utilizando (2.2) y escribiendo:
zt−µ=φ(zt−1−µ) +at
multiplicando porzt−k, tomando esperanzas y llamando:
γk =E[(zt−k−µ)(zt−µ)]
=E[zt−kzt−zt−kµ−µzt+µ2]
=E[zt−kzt−zt−kµ−µ2+µ2]
=E[zt−k(zt−µ)]
se obtiene
como |φ| < 1 la dependencia entre observaciones se amortigua al aumentar el
retardo en particular usando la formula encontrada en la función de varianzas:
γ1= φσ
2
a
1−φ2. (2.3)
5. Función de autocorrelación. Se verifica:
$k = γk
γ0
= φγk−1
γ0
=φ$k−1
como, según la formula encontrada para la función de varianzas y (2.3),$1 = φ,
esta función será:
$k =φk (2.4)
y cuandokes grande,$ktiende a cero con rapidez que depende deφ.
2.1.3.
Proceso autorregresivo general (AR(p)).
Un procesozt es autorregresivo de ordenpsi
zt =φ1zt1+...+φpzt−p+at (2.5)
dondezt = zt −µ yat es un proceso de ruido blanco independiente dezt−h, para todo
h ≥1. Para manejar de forma más cómoda estos procesos se usara eloperador de despla-zamiento hacia atrás, B, definido en la sección anterior, de tal forma que la ecuación de un procesoAR(P)es:
zt = (φB+...+φpBp)zt +at
es decir:
(1−φ1B−φ2B2−...−φpBp)zt = at. (2.6)
y renombrando aφp(B) = 1−φ1B−φ2B2−...−φpBpcomo un polinomio de grado p
en el operador de retardo, cuyo primer término es la unidad, obtenemos,
que es la expresión general de un proceso autorregresivo. Y se nombraráecuación carac-terística del proceso a: φp(B) = 0, que estará en función de B. Esta ecuación tendrá p
raìcesG1−1, ...,G−p1, en general distintas escribiendo,
φp(B) = p
∏
i=1
(1−GiB)
Finalizaremos, comprobando que el proceso será estacionario si|Gi|<1, para todoi. La modelización de una serie a través de un modeloARexige que el modelo sea estacio-nario en media y varianza. La condición de estacionariedad en media exige que laE(Yt)
no sea función del tiempo y la E(Yt) debe ser finita y determinada, observaremos qué
condiciones deben verificar los parámetrosφ1, ...φppara que el proceso sea estacionario.
1. Función de medias Tomando esperanzas en (2.5) e imponiendo que la media sea constante se obtiene:
zt =c+φ1zt−1+...+φpzt−p+at
E[zt] = E[c+φ1zt−1+...+φpzt−p+at]
µ =E[c] +E[φ1zt−1] +...+E[φpzt−p] +E[at]
µ =c+φ1E[zt−1] +...+E[φpzt−p] +0
µ =c+φ1µ+...+φpµ
µ = c
1−φ1−...−φp.
2. Función de varianzas Una forma alternativa de comprobar que el modelo autorre-gresivo de ordenpes estacionario en varianza es comprobando que las raíces del polinomio característico, en módulo, sean menores que la unidad. Con el fin de comprobar si el modelo es estacionario en varianza se van a calcular las raíces del polinomio característico del modelo, para ello se iguala a cero la parte autorregre-siva del modelo:
sustituyezt porλty se obtiene,
λt −φ1λt−1−...−φpλt−p =0
dividiendo porλt−pse tiene,
λp−φ1λp−1−...−φp =0
La solución de la ecuación o raíces del polinomio de grado p se puede escribir como se hizo anteriormente,
φp(B) = p
∏
i=1
(1−GiB)
así pues, si el modelo especificado para representar la serie (2.5) cumple las condi-ciones|Gi|<1 y∑ip=1Gik 6=1 el modelo será estacionario en media y varianza.
3. Función de autocovarianzasPara esto multiplicamos (2.5) por zt−k(k >0), tomando
esperanza, resulta
γk =φ1γk−1+...+φpγk−p k≥1 (2.8)
además,
γ0=φ1γ1+φ2γ2+...+φpγp+σa2
4. Función de autocorrelaciónSi dividimos (2.8) por γ0se obtienen las relaciones entre
correlaciones
$k =φ1$k−1+...+φp$k−p k>0
y las correlaciones satisfacen la misma ecuación que el proceso
La solución general de la ecuación es
$k =
p
∑
i=1
AiGki (2.10)
donde losAison constantes a determinar a partir de las condiciones iniciales y Gi
es una solución de la ecuación característica.
Comprobar la condición de |Gi| < 1, es observar que la condición |$| < 1 exige
que no exista en (2.10) ningúnGimayor que la unidad, ya que entonces cuandok
aumenta el término Gik crecería sin limite, y no puede existir una raíz unitaria ya que entonces su componenteGikno decrece y los coeficientes $k no tienden a cero
CAPÍTULO
3
Aplicación
Una de las características definitivas de las series temporales es que se trata de una lista de observaciones en las que el orden es importante ya que ordenar es muy importante porque hay dependencia y cambiar el orden podría cambiar el significado de los datos.
3.1.
Análisis series de tiempo
Algunas preguntas importantes a tener en cuenta al mirar una serie de tiempo son [of Science, 2016]:
¿Existe una tendencia , lo que significa que, en promedio, las mediciones tienden a aumentar (o disminuir) con el tiempo?
¿Son sus valores atípicos ? En la regresión, los valores extremos están muy lejos de su línea. Con datos de series de tiempo, sus valores extremos están muy lejos de otros datos.
¿Existe un ciclo o período de largo plazo sin relación con los factores de estaciona-lidad?
¿Existe varianza constante en el tiempo, o es la varianza no constante?
¿Hay cambios abruptos en el nivel de la serie o en la varianza?
3.1.1.
Ejemplo
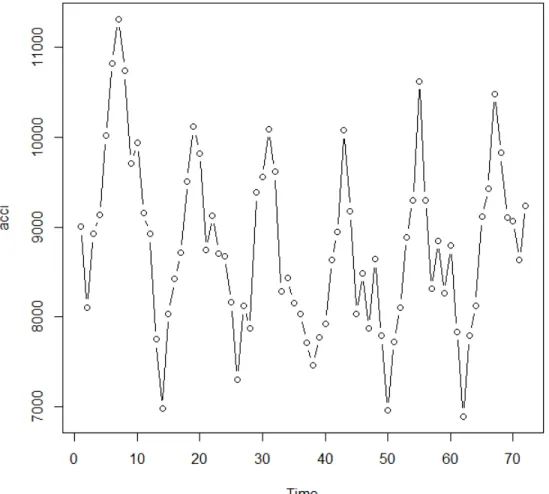
La siguiente tabla muestra las muertes accidentales mensuales en los Estados Unidos, 1973-1978. La siguiente gráfica es una gráfica de series de tiempo del número de muertes
1973 1974 1975 1976 1977 1978 Jan 9007 7750 8162 7717 7792 7836 Feb 8106 6981 7306 7461 6957 6892 Mar 8928 8038 8124 7776 7726 7791 Apr 9137 8422 7870 7925 8106 8129 May 10017 8714 9387 8634 8890 9115 Jun 10826 9512 9556 8945 9299 9434 Jul 11317 10120 10093 10078 10625 10484 Aug 10744 9823 9620 9179 9302 9827
Sep 9713 8743 8285 8037 8314 9110 Oct 9938 9129 8433 8488 8850 9070 Nov 9161 8710 8160 7874 8265 8633 Dec 8927 8680 8034 8647 8796 9240
Cuadro 3.1: Muertes accidentales mensuales en U.S.A
Figura 3.1: Gráfica muertes accidentales mensuales en U.S.A., 1973−1978
De la gráfica anterior podemos decir, que no hay una tendencia consistente (ascendente o descendente) sobre todo el intervalo de tiempo. La serie parece vagar lentamente hacia arriba y hacia abajo. Casi por definición, se podría decir que existe una componente estacional pronunciada con periodo 12, no hay valores atípicos obvios y se podría juzgar si la varianza es constante o no.
El código usado para la figura 3.1, se muestra a continuación.
1 m o n t h s<- c( 1 : 7 2 ) 2 acci<- c
36 9 8 1 , 8 0 3 8 , 8 4 2 2 , 8 7 1 4 , 9 5 1 2 , 1 0 1 2 0 , 9 8 2 3 , 8 7 4 3 , 9 1 2 9 , 8 7 1 0 , 8 6 8 0 , 8 1 6 2 , 7 3 0 6 , \ \
48 1 2 4 , 7 8 7 0 , 9 3 8 7 , 9 5 5 6 , 1 0 0 9 3 , 9 6 2 0 , 8 2 8 5 , 8 4 3 3 , 8 1 6 0 , 8 0 3 4 , 7 7 1 7 , 7 4 6 1 , 7 7 7 6 , \ \
57 9 2 5 , 8 6 3 4 , 8 9 4 5 , 1 0 0 7 8 , 9 1 7 9 , 8 0 3 7 , 8 4 8 8 , 7 8 7 4 , 8 6 4 7 , 7 7 9 2 , 6 9 5 7 , 7 7 2 6 , 8 1 0 6 , \ \
68 8 9 0 , 9 2 9 9 , 1 0 6 2 5 , 9 3 0 2 , 8 3 1 4 , 8 8 5 0 , 8 2 6 5 , 8 7 9 6 , 7 8 3 6 , 6 8 9 2 , 7 7 9 1 , 8 1 2 9 , 9 1 1 5 , \ \
79 4 3 4 , 1 0 4 8 4 , 9 8 2 7 , 9 1 1 0 , 9 0 7 0 , 8 6 3 3 , 9 2 4 0 ) 8
n a m e s( acci )<-m o n t h s 9
acci<- ts( acci ) 10
plot( acci , type =" b ") 11
l i b r a r y( a s t s a )
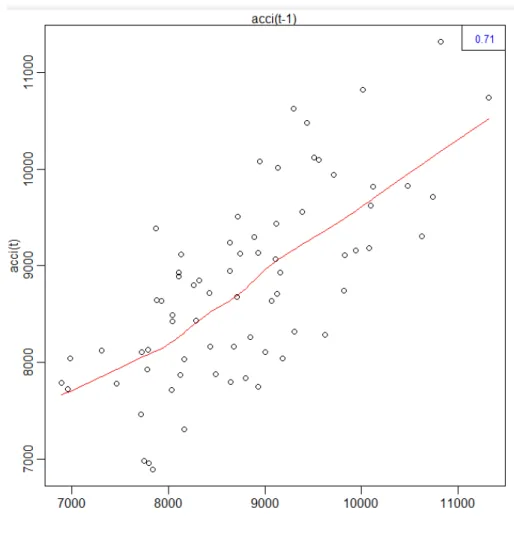
El modelo lineal que se usará para predecir el valor en el tiempo presente usando un valor en un tiempo pasado será el llamado AR(1).El orden del modelo expresa el nú-mero de observaciones retrasadas de la serie temporal analizada que intervienen en el modelo. Una de las formas de evaluar un modelo AR(1)es gráficar los datos de la serie contra los valores retrasados un período de tiempo.
El código usado para la figura 3.2 se muestra a continuación,
1> x l a g 1 = lag ( acci , -1) 2
> y =c b i n d( acci , x l a g 1 ) 3
> head ( y )
4 acci x l a g 1 5
[1 ,] 9007 NA 6
[2 ,] 8106 9007 7
[3 ,] 8928 8106 8
[4 ,] 9137 8928 9
[5 ,] 1 0 0 1 7 9137 10
[6 ,] 1 0 8 2 6 1 0 0 1 7 11
Figura 3.2: Gráficaxt v.s.xt−1
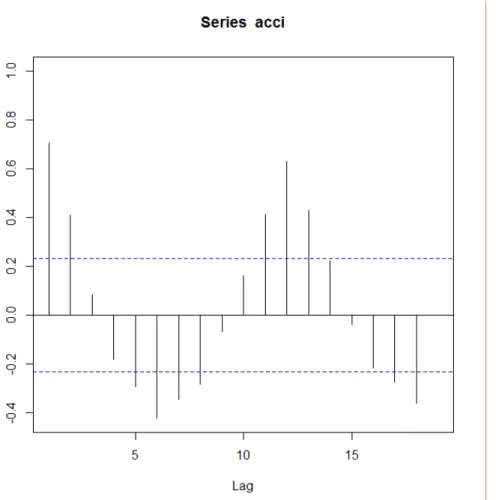
Por tanto,en este modelo, el valor de x en el tiempo t es una función lineal del valor dex en el tiempot−1.Y el modelo escogido sera optímo para la predicción a realizar. La figura 3.3 es la función de autocorrelación donde, si φ1 > 0,la ACF decrece
expo-nencialmente a 0 cuandolag−h crece, o si φ1 < 0, la ACF decrece exponencialmente
a 0 cuando lag−h cree, pero el signo de las correlaciones se alterna entre positivo y negativo.El código de la figura 3.3 se muestra a continuación,
1a r 1 f i t =lm( y [ ,1]~ y [ , 2]) 2
> s u m m a r y( a r 1 f i t ) 3
> plot( a r 1 f i t$fit , a r 1 f i t$ r e s i d u a l s) 4
Figura 3.3: Gráfica 1
5
> plot(cor)
CAPÍTULO
4
Conclusiones
Bibliografía
[Bartle, 1995] Bartle, R. (1995). The elements of integration and Lebesgue measure. Wiley classics library. Wiley.
[Bosq, 2000] Bosq, D. (2000). Linear Processes in Function Spaces, Theory and applications. Springer science.
[Brezis, 2010] Brezis, H. (2010). Functional Analysis, Sobolev Spaces and Partial Differential Equations. Universitext. Springer New York.
[Brockwell, 2006] Brockwell, P. D. (2006). Time series theory and methods. Springer scien-ce.
[Coleman, 1986] Coleman, R. (1986). Procesos estocásticos:Volumen 14. Limusa.
[Grigoriu, 2002] Grigoriu, M. (2002). Stochastic Calculus. Springer science.
[Kreyszig, 1989] Kreyszig, E. (1989). Introductory Functional Analysis with Applications. John Wiley and Sons.
ÍNDICE ALFABÉTICO
[Peña Sanchez, 1995] Peña Sanchez, D. (1995). Estadística Modelos y métodos. Ma-drid:Alianza.