INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
“IMPLEMENTACIÓN NUMÉRICA EN EL PROGRAMA
DYNROT DEL RESPIRO NO LINEAL DE LA FISURA DE
UN ELEMENTO FINITO VIGA”
T E S I S
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN
INGENIERÍA MECÁNICA
P R E S E N T A
UZIAS EDREI CORTES SANCHEZ
DIRECTORES DE TESIS:
DR. VALERIY NOSOV
DR. JULIO CÉSAR GÓMEZ MANCILLA
CARTA CESIÓN DE DERECHOS
En la Ciudad de México, D.F. el día 5 del mes de Junio del año 2014 , el que suscribe Uzias Edrei Cortes Sanchez alumno del Programa de Maestría en Ciencias en Ingeniería Mecánica, con número de registro A120860 , adscrito a la Sección de Estudios de Posgrado e Investigación de la ESIME Zacatenco, manifiesto que es el autor intelectual del presente trabajo de Tesis bajo la dirección del Dr. Valeriy Nosov y del Dr. Julio César Gómez Mancilla y cede los derechos del trabajo titulado “IMPLEMENTACIÓN NUMÉRICA EN EL PROGRAMA DYNROT DEL RESPIRO NO LINEAL DE LA FISURA DE UN
ELEMENTO FINITO VIGA” , al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación.
Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del autor y/o director del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección [email protected] . Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.
______________________________
Uzias Edrei Cortes Sanchez
Nombre y firma
especiales para mí, y a las cuales quiero expresar mi más profunda gratitud:
En primer lugar al Eterno por la vida, salud y bondades que me ha dado a mi vida, por permitirme cerrar este ciclo el cual no lo hubiera logrado si no fuera por su amor, misericordia, sabiduría e inteligencia que me ha proporcionado desde siempre.
A mi esposa Sarai, que ha estado siempre conmigo apoyándome incondicionalmente, porque me alienta a seguir en los momentos aún más difíciles y me ha enseñado a confiar plenamente en el Creador sin importar el resultado, por su amor, cariño, consejos y paciencia que nunca me han faltado.
A mis padres José Luis y Elva, y hermanos Luis Miguel y Zaira, por el apoyo incondicional que siempre me han brindado durante todo mi formación profesional y porque siempre han estado para mi en todos los momentos buenos y malos. No hay palabras para describir lo maravillosos que son en mi vida y que cada consejo de ellos esta en mi corazón guardado por siempre.
A mis suegros Francisco y Lucila, por el apoyo que me han brindado desde el primer momento que los conocí, porque me han dado su cariño, apoyo y consejos como a uno de sus hijos, y en todo momento me han impulsado a seguir hacia delante y a esforzarme en cada circunstancia de la vida, siempre doy gracias al Creador por haberlos puesto como parte de mi familia.
Al Instituto Politécnico Nacional por haberme brindado la oportunidad de continuar con mis estudios de posgrado en esta maravillosa institución.
Al Consejo Nacional de Ciencia y Tecnología por su apoyo económico lo cual me permitió la estancia en el programa de maestría.
Al mis directores de tesis, el Dr. Julio César Gómez Mancilla, por compartir sus conocimientos y experiencias profesionales, así como también las asesorías y dedicación puesta a lo largo de este trabajo. Al Dr. Valeriy Nosov por su gran ayuda, paciencia y conocimiento transmitido para poder desarrollar este trabajo hasta su culminación, por su valioso tiempo invertido en mí, por su gran calidad humana y por el gran profesionalismo con el que dirige trabajos de investigación.
Al Dr. Jesús Meda, por su ayuda y generosidad brindada en todo momento, por sus grandes aportaciones a este trabajo y por la calidad con la que transmite sus conocimientos en clase.
A la Comisión Revisora conformada por el Dr. Valeriy Nosov, Dr. Julio César Gómez Mancilla, Dr. Jesús Alberto Meda Campaña, Dr. José Ángel Lodegario Ortega Herrera, Dr. Orlando Susarrey Huerta, Dr. Ignacio Carvajal Mariscal, por su generosidad científica en la revisión del presente trabajo y sus valiosas criticas al discutir este trabajo. En especial al Dr. Orlando Susarrey, por todas las atenciones y apoyo brindados desde el inicio de la maestría y por la gran calidad humana con la que siempre conté.
A los profesores de la Sección de Estudios de Posgrado e Investigación de la ESIME Zacatenco, por sus enseñanzas e impulso para seguir superándome intelectualmente.
CONTENIDO
RESUMEN
IV
ABSTRACT
V
OBJETIVO
VI
OBJETIVOS ESPECÍFICOS
VI
JUSTIFICACIÓN
VII
INTRODUCCIÓN
VIII
ÍNDICE DE FIGURAS
IX
ÍNDICE DE TABLAS
XIII
NOMENCLATURA
XIV
CAPÍTULO 1
ESTADO DEL ARTE
1.1 INTRODUCCIÓN 3
1.2 TEORÍA DE VIGAS Y ESTUDIOS EN VIGAS AGRIETADAS 5
1.2.1 TEORÍA DE VIGAS 5
1.2.2 ESTUDIOS EN VIGAS AGRIETADAS 8
1.3 DIVERSOS ENFOQUES DE MODELACIÓN APLICADOS PARA ANALIZAR ROTORES AGRIETADOS. 13 1.3.1 THH (TRANSFORMADA DE HILBERT‐ HUANG) 14
1.3.2 MECANISMO DEL RESPIRO 14
1.3.3 TRANSFORMADA WAVELET 14
1.3.4 INVESTIGACIÓN A TRAVÉS DEL ENFOQUE DE ELEMENTOS FINITOS 15 1.3.5 ANÁLISIS A TRAVÉS DE LA DINÁMICA NO LINEAL DE UN ROTOR AGRIETADO 17 1.3.6 DESARROLLOS RECIENTES EN EL ANÁLISIS DE GRIETAS 18
1.4 AVANCES Y DESARROLLOS EN EL LABORATORIO DE VIBRACIONES Y ROTODINÁMICA DE LA SEPI‐ ESIME ZACATENCO 19
1.4.1 AVANCES EN ROTODINÁMICA 19
CAPÍTULO 2
MÉTODO DEL ELEMENTO FINITO
2.1 INTRODUCCIÓN 25 2.2 SISTEMAS DISCRETOS Y SISTEMAS CONTINUOS 25
2.3 HIPÓTESIS DE DISCRETIZACIÓN 26
2.4 ELASTICIDAD UNIDIMENSIONAL 28 2.5 ELEMENTO DE 2 NODOS 30
2.5.1 ELEMENTO CON ÁREA VARIABLE 32
2.5.2 TENSIONES 33
2.6 FUNCIONES DE INTERPOLACIÓN 33 2.7 INTRODUCCIÓN AL ESTUDIO DE FLEXIÓN DE VIGAS 35
2.7.1 RESUMEN DE LA TEORÍA CLÁSICA DE FLEXIÓN DE VIGAS 36 2.7.2 TEORÍA CLÁSICA. RESOLUCIÓN POR EL MEF 38
2.7.3 TEORÍA DE TIMOSHENKO 42
CAPÍTULO 3
MODELACIÓN DEL ELEMENTO FINITO VIGA FISURADO EN EL PROGRAMA DYNROT
3.1 INFORMACIÓN GENERAL DEL PROGRAMA DYNROT 53 3.2 DESCRIPCIÓN DEL FUNCIONAMIENTO DEL PROGRAMA DYNROT 55
3.2.1 ELEMENTOS EXISTENTES 56
3.2.2 CONSTRUCCIÓN DE UN MODELO EN DYNROT 57
3.3 CARACTERIZACIÓN DEL NUEVO ELEMENTO FINITO VIGA FISURADO CON RESPIRO 59
3.3.1 CONSIDERACIONES GENERALES PARA LA VIGA 59 3.3.2 CARACTERIZACIÓN DEL ELEMENTO VIGA TIMOSHENKO 60 3.3.3 MODELADO DEL ELEMENTO FISURADO 67 3.3.4 MODELADO DEL RESPIRO DE LA FISURA 69
CAPÍTULO 4
RESULTADOS DE SIMULACIÓN NUMÉRICA DEL ELEMENTO FINITO VIGA FISURADO CON RESPIRO
4.2 RESULTADOS PARA UN EJE FISURADO CON LA FUNCIÓN RESPIRO DE PAPADOPOULOS 79
a) MODELO CON PROFUNDAD DE FISURA DE μ=0.05 DEL RADIO 80 b) MODELO CON PROFUNDAD DE FISURA DE μ=0.1 DEL RADIO 84
4.3 RESULTADOS PARA UN EJE FISURADO CON LA FUNCIÓN RESPIRO DE MAYES & DAVIES 88
a) MODELO CON PROFUNDAD DE FISURA DE μ=0.1 DEL RADIO 89 b) MODELO CON PROFUNDAD DE FISURA DE μ=0.25 DEL RADIO 93
96
c) MODELO CON PROFUNDAD DE FISURA DE μ=0.5 DEL RADIO 97
CAPÍTULO 5
CONCLUSIONES
103
TRABAJOS FUTUROS
104
REFERENCIAS
105
APÉNDICE A
115
RESUMEN
En este trabajo se presenta una teoría para analizar el efecto causado por el mecanismo de respiro en un sistema rotor eje fisurado, el cual se analizará mediante el Método de Elemento Finito aplicado en el programa DYNROT, y al cual se le implementara un nuevo elemento viga fisurado tipo Timoshenko con dos diferentes tipos de función respiro, el primero de ellos es el propuesto y desarrollado por Papadopoulos, y el segundo es el propuesto por Mayes y Davies, esto se desarrollará en una programación basada en MATLAB®.
La estabilidad de un sistema rotor eje que presenta una fisura transversal con respiro, es estudiada considerando los efectos de la profundidad de la fisura y la velocidad de rotación del eje. El método de integración en el tiempo de Runge Kutta Fehlberg, es utilizado en MATLAB bajo el comando de ode45, y es utilizado en el presente trabajo para determinar la respuesta vibratoria forzada en el estado estable del sistema, buscando así también orbitas con curvas de Lissajous que nos confirmen la presencia de la fisura en el sistema.
En el capítulo 1 se realiza una introducción y una revisión al estado del arte sobre las diversas investigaciones y modelos que se han realizado y utilizado en las últimas décadas para la detección de fisuras. Y por último se muestra una breve revisión a los temas desarrollados recientemente por los diversos alumnos del Laboratorio de Vibraciones y Rotodinamica de la SEPI ESIME Zacatenco.
En el capítulo 2 se aborda una introducción donde se analizan las bases para el desarrollo del elemento finito, las funciones de interpolación, ecuaciones de equilibrio, la obtención de la matriz de rigidez, análisis de la viga tipo Euler Bernoulli y por último se aborda en la teoría de la viga tipo Timoshenko en el Método del Elemento Finito.
En el capítulo 3 se explica de forma general el funcionamiento del programa DYNROT en MATLAB, las diversas formas de obtener o crear un nuevo modelo para su análisis. Se presentan los elementos existentes en DYNROT, y en éste mismo capítulo se caracteriza el nuevo elemento finito viga fisurado y la modelación de los mecanismos de función respiro.
En el capítulo 4 se presentan los resultados de los modelos creados en DYNROT para su comparación entre un eje íntegro y un fisurado, de los cuales se presenta mayor énfasis al elemento fisurado para el análisis y comportamiento a diferentes profundidades de la fisura y con los dos diferentes tipos de mecanismo de respiro.
ABSTRACT
In this work a theory for analyzing the effect caused by the breathing mechanism on a cracked rotor shaft system, is studied by the Finite Element Method applied in DYNROT program, which will implement a new Timoshenko cracked beam element with two different types of breathing function, the first is the proposed and developed by Papadopoulos, and the second is proposed by Mayes and Davies, this is developed in a program based on MATLAB ®.
The stability of a rotor shaft system with a transverse crack with breathing mechanism is studied by considering the effects of the crack depth and the speed of shaft rotation. The time integration of the Runge Kutta Fehlberg method, is used in MATLAB under the ode45 command, and is used in this work to determine the forced vibratory response in the steady state of the system and looking also orbits with Lissajous curves we confirm the presence of the crack in the system.
In Chapter 1 an introduction to the state of the art on various research and models that have been made and used in recent decades for crack detection is performed. And finally a brief review of the topics recently developed by various students of the Laboratory of Vibrations and Rotordynamic of the SEPI ESIME Zacatenco is shown.
In Chapter 2 is present an introduction where the basis for the development of finite element are analyzed, the interpolation functions, the equilibrium equations, obtaining the stiffness matrix, analysis of Euler Bernoulli beam and finally the theory of Timoshenko beam in the Finite Element Method is presented.
In the Chapter 3 explains the generally operation of the DYNROT program in MATLAB, the various ways to obtain or create a new model for his analysis. The existing elements in DYNROT are presented, and in this chapter the new modeling of the finite element cracked beam and the mechanisms of breathing function is characterized.
In Chapter 4 are present the results of the models created in DYNROT for comparison between a full shaft and cracked shaft, which presents a greater emphasis to cracked element for the analysis and behavior at different depths and different types of breathing mechanism.
OBJETIVO
Implementar un nuevo elemento finito viga fisurado, con dos diferentes tipos de mecanismos de respiro en base al programa de DYNROT desarrollado por Giancarlo Genta, el cual se encuentra en un lenguaje de programación de MATLAB®.
OBJETIVOS ESPECÍFICOS
• Implementar la función de respiro de Papadopoulos y posteriormente la de Mayes & Davies para analizar y confirmar el gran efecto que provoca la fisura en la respuesta orbital y en el cambio en las frecuencias naturales del sistema.
• Confirmar la existencia de resonancias locales, tales como ¼, ⅓, ½, ¾, etc., de la frecuencia natural en el espectro de la respuesta vibratoria.
JUSTIFICACIÓN
Los ejes se encuentran entre los componentes sujetos a quizás las más arduas condiciones de trabajo en lo se refiere a equipo rotatorio de alto rendimiento usado en la industria, tales como; compresores de alta velocidad, turbinas del vapor y de gas, generadores, bombas, etc. Aunque generalmente son absolutamente robustos y bien diseñados, los ejes en operación son a veces susceptibles a serios defectos que se desarrollan sin previo aviso evidente. Los ejes son los primeros candidatos a grietas por fatiga debido a la naturaleza rápidamente fluctuante de los esfuerzos de flexión, la presencia de numerosos concentradores de esfuerzo y los posibles defectos de diseño o fabricación. Las amplias variaciones en temperatura y medio ambiente durante la operación también contribuyen a las condiciones que conducen a una eventual falla por fatiga. Las consecuencias de la falta total del eje pueden ser catastróficas con enormes costos en pérdidas de tiempo, consecuente daño al equipo y potencial lesión al personal.
La detección temprana de fisuras, es indispensable para asegurar una operación confiable de la maquinaria rotatoria y para la toma de decisiones técnicas relacionadas con la rehabilitación o sustitución del rotor, es importante determinar si el rotor puede seguir operando o es necesario retirarlo de servicio tomando en cuenta el impacto económico que puede representar esto.
Por un lado, los métodos directos de detección de grietas tales como ultrasonido, corrientes parásitas, inspección boroscópica, etc., en la práctica no son fácilmente implementados en línea lo que hace muy caro el análisis de un rotor para la detección de grietas o fisuras a través de estos métodos debido a que la máquina tiene que llevarse fuera de servicio con las consecuentes pérdidas económicas que esto implica.
INTRODUCCIÓN
La capacidad de detectar daños en máquinas, y en particular en las máquinas rotatorias, se convirtió en una necesidad prioritaria y cada vez mayor en la industria, por tal razón la inversión económica ha aumentado en los últimos años con el fin de generar métodos cada vez más efectivos que puedan prevenir grandes daños y pérdidas catastróficas en la industria.
Una forma de daño que puede conducir a una falla catastrófica es la falta efectiva de detección de una grieta en un eje, y en los últimos años muchos investigadores han hecho un esfuerzo importante en la detección de grietas transversales de los ejes. Este problema puede ser abordado mediante la observación del comportamiento vibratorio de los sistemas de rotor con una grieta, y una de las ventajas de la medición de la vibración es que la detección de una grieta puede llevarse a cabo de manera no invasiva. En este trabajo un modelo teórico se utiliza para identificar las características de un sistema en la presencia de una grieta transversal. En este punto es necesario definir algunos términos: si un rotor tiene una grieta, esta grieta puede permanecer abierta o cerrada durante el movimiento de los rotores, o puede abrir y cerrar durante las diferentes partes del ciclo. Este último caso es referido por algunos autores como 'el respiro de una grieta'.
Generalmente, se consideran dos enfoques diferentes para identificar la presencia de una grieta en estructuras giratorias. El primer enfoque se basa en el hecho de que la presencia de una grieta en el eje de rotación reduce la rigidez de la estructura, por lo tanto, se reducen las frecuencias naturales del eje no fisurado original. El segundo enfoque tiene en cuenta la influencia del respiro de una grieta transversal en la respuesta del modelo de un rotor. El comportamiento dinámico de un rotor fisurado y la evolución de la órbita en el tiempo parece ser la firma clásica para detectar la presencia del respiro de una grieta.
ÍNDICE DE FIGURAS
CAPÍTULO 1
Fig. 1.1 - a) Daniel Bernoulli (1700-1782). b) Leonhard Euler (1707-1783). c) Stephen Timoshenko
CAPÍTULO 2
Fig. 2.1 Estructuras discreta y continua.
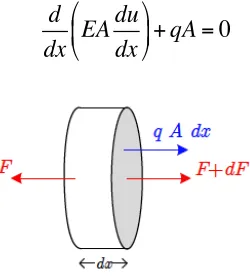
Fig. 2.2 Problema de elasticidad unidimensional.
Fig. 2.3 Equilibrio de fuerzas en elasticidad unidimensional.
Fig. 2.4 Elemento de dos nodos.
Fig. 2.5 Funciones de interpolación. Elemento de dos nodos.
Fig. 2.6 Elemento de área variable.
Fig. 2.7 Coordenadas locales.
Fig. 2.8 Elemento de dos nodos. Funciones de interpolación.
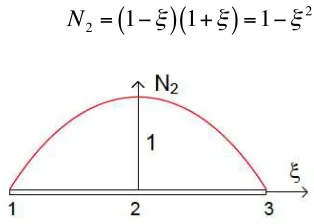
Fig. 2.9 Elemento de 3 nodos. Función de interpolación del nodo central.
Fig. 2.10 Elemento de 3 nodos. Función de interpolación del nodo esquina.
Fig. 2.11 Elemento de 3 nodos. Interpolación del nodo esquina.
Fig. 2.12 Elemento de 3 nodos. Campo de deformaciones.
Fig. 2.13 Deformaciones en vigas. Teoría clásica.
Fig. 2.14 Elemento viga.
Fig. 2.15 Deformaciones en una viga. Teoría de Timoshenko
CAPÍTULO 3
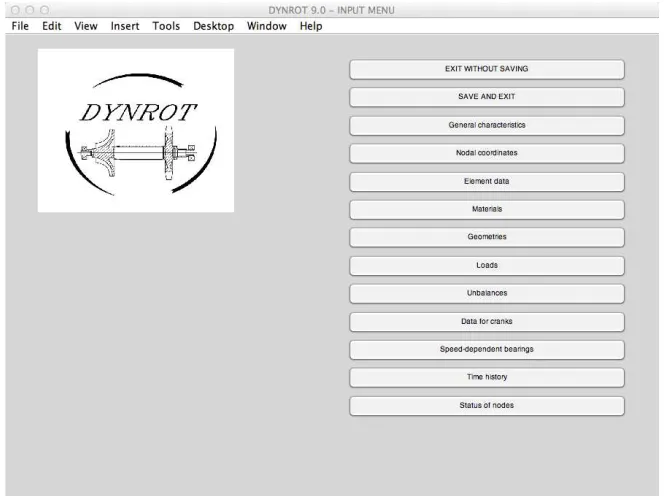
Fig. 3.1 Menú de DYNROT.
Fig. 3.2 Menú Interactivo para Crear un modelo Nuevo.
Fig. 3.3 Modelo del Respiro de la Fisura: (a) Variaciones del estado de la fisura para diferentes valores de tiempo, (b) Geometría del elemento fisurado.
Fig. 3.4 Mecanismo de apertura y cierre de la fisura.
Fig. 3.5 Comparación entre las funciones de Gasch y Papadopoulos de apertura y cierre de la fisura.
Fig. 3.6 Función de apertura y cierre de la fisura propuesta por Mayes y Davies.
CAPÍTULO 4
Fig. 4.1 Modelo en DYNROT de una viga sin Fisura.
Fig. 4.2 Primer Forma Modal de un Eje Integro
Fig. 4.3 Segunda Forma Modal de un Eje Integro
Fig. 4.4 Tercera Forma Modal de un Eje Integro.
Fig. 4.5 Respuesta al desbalance en el nodo 2
Fig. 4.6 Respuesta Orbital en el nodo 2
Fig. 4.7 Respuesta al desbalance en el nodo 5
Fig. 4.8 Respuesta Orbital en el nodo 5
Fig. 4.9 Respuesta al desbalance en el nodo 8
Fig. 4.10 Respuesta Orbital en el nodo 8
Fig. 4.11 Respuesta al desbalance: a) en el nodo 10; b) en el nodo 15
Fig. 4.12 Modelo de un Eje con Fisura. Fisura a la mitad del Eje
Fig. 4.14 Espectro de la Amplitud en el nodo 2
Fig. 4.15 Espectro de la Amplitud en el nodo 5
Fig. 4.16 Respuesta Orbital en el nodo 2
Fig. 4.17 Respuesta Orbital en el nodo 5
Fig. 4.18 Espectro de la Amplitud en el nodo 8
Fig. 4.19 Respuesta Orbital en el nodo 8
Fig. 4.20 Profundidad de la Fisura µ=0.1 a) Primera Forma Modal; b) Segunda Forma Modal
Fig. 4.21 Espectro de la Amplitud en el nodo 2
Fig. 4.22 Espectro de la Amplitud en el nodo 5
Fig. 4.23 Respuesta Orbital en el nodo 2
Fig. 4.24 Respuesta Orbital en el nodo 5
Fig. 4.25 Espectro de la Amplitud en el nodo 8
Fig. 4.26 Respuesta Orbital en el nodo 8
Fig. 4.27 Modelo de un Eje con Fisura a la mitad del Eje
Fig. 4.28 Profundidad de la Fisura µ=0.1 a) Primera Forma Modal; b) Segunda Forma Modal
Fig. 4.29 Tercera Forma Modal para µ=0.1 del Radio
Fig. 4.30 Espectro de la Amplitud en el nodo 2
Fig. 4.31 Espectro de la Amplitud en el nodo 5
Fig. 4.32 Espectro de la Amplitud en el nodo 8
Fig. 4.33 Respuesta Orbital en el nodo 2
Fig. 4.34 Respuesta Orbital en el nodo 5
Fig. 4.36 Profundidad de la Fisura µ=0.25 a) Primera Forma Modal; b) Segunda Forma Modal
Fig. 4.37 Tercera Forma Modal para µ=0.25 del Radio
Fig. 4.38 Espectro de la Amplitud en el nodo 2
Fig. 4.39 Respuesta Orbital en el nodo 2
Fig. 4.40 Espectro de la Amplitud en el nodo 5
Fig. 4.41 Respuesta Orbital en el nodo 5
Fig. 4.42 Espectro de la Amplitud en el nodo 8
Fig. 4.43 Respuesta Orbital en el nodo 8
Fig. 4.44 Primera y Segunda Forma Modal del sistema para una profundidad de fisura a µ=0.5 del radio.
Fig. 4.45 Tercera Forma Modal para una profundidad de fisura a µ=0.5 del radio
Fig. 4.46 Espectro de la Amplitud en el nodo 2
Fig. 4.47 Respuesta Orbital en el nodo 2
Fig. 4.48 Espectro de la Amplitud en el nodo 8
ÍNDICE DE TABLAS
Tabla 1.1 Principales aportaciones al campo de las vibraciones.
Tabla 1.2 - Comparación de las cuatro Teorías de Vigas.
Tabla 3.1 Unidades del SI utilizadas en DYNROT.
Tabla 4.1 Primeras 10 Frecuencias Naturales para el Modelo de un Eje Integro
Tabla 4.2 Primeras 10 Frecuencias Naturales para el Modelo de un Eje Fisurado, a una Profundidad de Fisura de µ=0.05 del Radio.
Tabla 4.3 Primeras 10 Frecuencias Naturales para el Modelo de un Eje Fisurado, a una Profundidad de Fisura de µ=0.1 del Radio.
Tabla 4.4 Primeras 10 Frecuencias Naturales para el Modelo de un Eje Fisurado, a una Profundidad de Fisura de µ=0.1 del Radio, con función de Mayes y Davies.
Tabla 4.5 Primeras 10 Frecuencias Naturales para el Modelo de un Eje Fisurado, a una Profundidad de Fisura de µ=0.25 del Radio.
NOMENCLATURA
���� Sistema de coordenada fijo
� Área no fisurada de la sección transversal B Matriz de derivadas de funciones de forma
C Matriz de amortiguamiento
� Coeficiente de amortiguamiento
� Módulo de Young
∈ Deformación
�!! Tensión axial extensional
� � Vector de fuerzas externas
�!, �! Fuerzas a corte
�! Fuerza axial
G Modulo cortante
g Gravedad en � �!
� �� Función de respiro de la fisura
� Momento de inercia
�! Momento de área de inercia del disco, plano ��� o ��� � Unidad imaginaria �= −1
�!, �! Momentos de inercia de los ejes centroidales
�!, �! Momentos de inercia de área de los ejes W,Y
J Momento de masa de inercia
K Matriz de rigidez
� Longitud en �
�!"!#$ Longitud total de la viga, en �
� Frecuencia natural espacial, en ���.�!! M Matriz de masa
� Masa
�!,�! Momentos aplicados a flexión
�! Momento torsional
N Matriz de función de forma
� Profundidad de la fisura adimensional
� Radio del eje, en �
�!"#$% Densidad del acero, en ��.�! !
� Densidad
� Coordenada adimensional �= � �
�! Coordenadas generalizadas
� Cortante, en �
u Desplazamientos generalizados
� Energía potencial
� Velocidades generalizadas
�!, �! Esfuerzos transversales
� Energía cinética
�, �, � Funciones (�,�) de desplazamiento para el centroide de la viga, en �,�,�
� Velocidad de rotación del eje, en ���.�!!
�!"# Frecuencia natural del eje integro, en ���.�!! X Factor al corte
Capítulo 1
1.1 INTRODUCCIÓN
Las vibraciones se presentan en muchos aspectos de nuestra vida. En el cuerpo humano, por ejemplo, hay oscilaciones de baja frecuencia en los pulmones y en el corazón, oscilaciones de alta frecuencia en el oído, etc. Muchos sistemas creados por el hombre también experimentan o producen vibraciones, por ejemplo, cualquier desequilibrio en las máquinas que poseen partes giratorias, como ventiladores, separadores centrífugos, lavadoras, tornos, bombas centrifugas, prensas rotatorias y turbinas, ocasionan vibraciones. Para estas máquinas las vibraciones son indispensables. Los edificios y las estructuras experimentan vibraciones debido a la operación de maquinaria; el paso de los vehículos, aviones o trenes. En los sistemas estructurales, los esfuerzos fluctuantes ocasionados por las vibraciones, pueden generar fallas por fatiga. Las vibraciones pueden ser causantes de sonidos desagradables, llamados ruidos, pero también son las que generan la música que escuchamos [1].
Así mismo, las vibraciones son beneficiosas, como en los relojes atómicos que se basan en las vibraciones atómicas, alimentadores de partes vibratorias, mezcladora de pintura, instrumentos ultrasónicos que se utilizan en intervenciones quirúrgicas del ojo y otras partes del cuerpo, en sirenas y alarmas.
cascarones, y después, en otra fase, abarcaron las vibraciones y su relación con problemas prácticos y las oscilaciones no lineales.
[image:24.612.84.528.295.720.2]El libro de lord Rayleigh, Theory of Sound, el cual se publicó por primera vez en 1877, es una de las publicaciones completas más tempranas sobre las vibraciones. Desde el año 1800 la aplicación de estos principios para entender y diseñas sistemas se han afianzado, ha aumentado de manera notable en la diversidad de sistemas que se diseñan teniendo las vibraciones en mente: dispositivos y sistemas mecánicos, electromecánicos y microelectromecánicos, sistemas biomecánicos y biomédicos, barcos y submarinos, y estructuras civiles.
Tabla 1.1 Principales aportaciones al campo de las vibraciones.
Personaje Campo de las aportaciones
Galileo Galilei (1564-1612) Medición de la frecuencia de un péndulo, vibración de cuerdas.
Mari Mersenne (1588-1648) Vibración de cuerdas.
John Walls (1616-1703) Vibración de una cuerda: observación de modos y
armónicas.
Christian Huygens (1629-1695) Oscilaciones no lineales del péndulo.
Robert Hooke (1635-1703) Relaciones tono-frecuencia; ley de Hooke de la elasticidad.
Isaac Newton (1642-1727) Leyes del movimiento, el cálculo.
Gottfried Leibniz (1646-1716) El calculo
Joseph Sauveur (1653-1716)
Vibración de una cuerda: acuño el nombre de “armónica fundamental” para frecuencia baja y “armónica” para los componentes de frecuencia más alta.
Brook Taylor (1685-1731) Determinación de la frecuencias de una cuerda que vibra; teorema de Taylor.
Daniel Bernoulli (1700-1782) Principio de la sobreposición lineal de armónicas; vibraciones de las cuerdas y de las vigas.
Leonhard Euler (1707-1783)
Principio de la cantidad del movimiento angular; numero complejo; ecuaciones de Euler; vibraciones de vigas, placas y cascarones.
Jean d’Alembert (1717-1783) Principio de d’Alembert; ecuaciones de movimiento; ecuación de onda.
Charles Coulomb (1736-1806) Vibraciones torsionales; fricción.
Joseph Lagrange (1736-1813) Ecuaciones de Lagrange; frecuencias de los tubos o cañones de los órganos abiertos y cerrados.
E. F. F. Chladni (1756-1824) Vibraciones en placas: líneas nodales Jacob Bernoulli (1759-1789) Vibraciones de vigas, placas y cascarones.
J. B. J. Fourier (1788-1830) Series de Fourier.
Simeon Poisson (1781-1840) Vibraciones de placas, membranas y varillas; efecto de Poisson.
G. R. Kirchhoff (1824-1887) Vibraciones de placas y membranas.
R. F. A. Clebsch (1833-1872) Vibraciones de medios elásticos.
Lord Rayleigh (1842-1919) Métodos energéticos: método de Rayleigh, diagrama de Strutt; tratados sobre una vibración.
Gaston Floquet (1847-1920) Estabilidad de oscilaciones periódicas: teoría de Floquet.
Henry Poincaré (1854-1912) Oscilaciones no lineales; mapa de Poincaré; estabilidad; caos.
A. M. Liapunov (1857-1918) Estabilidad del equilibrio.
Aurel Stodola (1859-1943) Vibraciones de vigas, placas y membranas, hojas de turbinas.
C. G. P. De Laval (1845-1913) Vibraciones de discos rotatorios desbalanceados: soluciones prácticas.
Stephen Timoshenko (1878-1972)
Vibraciones de vigas; problemas de vibraciones en motores eléctricos, turbinas de vapor y turbinas hidroeléctricas.
Balthasar Van der Pol (1889-1959) Oscilaciones no lineales; oscilador de Van der Pol.
Jacob Pieter Den Hartog (1901-1989)
Sistemas no lineales con amortiguamiento de Coulomb; vibraciones de maquinaria rotatoria y reciprocante; libro de texto sobre vibraciones.
1.2 TEORÍA DE VIGAS Y ESTUDIOS EN VIGAS AGRIETADAS
En este trabajo se basa de manera teórica el comportamiento de vigas fisuradas, es por ello, que en esta parte se presentará brevemente el histórico de las teorías de vigas más relevantes como son: la teoría de viga Euler-Bernoulli, Viga Timoshenko y la teoría de Rayleigh. Posteriormente se detallarán los trabajos recientes que se han realizado en la detección de grietas (fisuras).
1.2.1 TEORÍA DE VIGAS
Los primeros investigadores admitieron que el efecto del pandeo es el único efecto realmente importante en las vibraciones transversales de una viga. El modelo de Euler-Bernoulli fue desarrollado en el siglo XVII, por Jacob Bernoulli (1654-1705), quien fue el primero en descubrir que la curvatura de una viga elástica es proporcional en todos sus puntos al momento de flexión en este punto. Daniel Bernoulli (1700-1782), sobrino de Jacob, formuló la primera ecuación diferencial de movimiento para una viga vibrando. Más tarde, la teoría de Jacob Bernoulli fue tomada por Leonhard Euler (1707-1783) [4].
La teoría de Euler-Bernoulli es conocida como la teoría clásica de vigas, es la más utilizada de todas, debido a que sus aproximaciones son demasiado buenas para aplicaciones en ingeniería, los cuales son obtenidos de una manera sencilla, sin embargo cuando se encuentran las frecuencias naturales esta teoría los sobre estima, lo cual es más notable para altas frecuencias. Es por esta razón que la teoría de Euler-Bernoulli es aplicada comúnmente para vigas delgadas.
Lord Rayleigh (1877) [5], es quien en su teoría añade el efecto de la inercia rotatoria, mejorando así la teoría de Euler-Bernoulli; lo que conlleva a tener una mejora en la estimación de las frecuencias naturales, sin embargo estas frecuencias no son lo suficientemente buenas. Otros investigadores, incluyendo Davies [6] estudiaron los efectos que produce la inercia rotatoria para una viga en voladizo.
Fig.1.1 - a) Daniel Bernoulli (1700-1782). b) Leonhard Euler (1707-1783). c) Stephen Timoshenko
Traill-Nash y Collar realizan un trabajo tanto teórico como experimental para una viga de sección uniforme. En la primera parte de su artículo obtienen resultados numéricos para los modelos antes mencionados: Euler-Bernoulli, Timoshenko. Con la utilización de vigas no delgadas, en las cuales los efectos del cortante y momento de inercia son de gran importancia.
Ellos únicamente proporcionan las expresiones para las frecuencias naturales y los modos. No obtuvieron respuestas para diferentes condiciones iniciales y cargas externas. Para hacer esto fue necesario que Dolph (1954) y Herrmann (1955) [12] presentaran las condiciones de ortogonalidad para la viga Timoshenko. Dolph resolvió el problema inicial y de condiciones frontera para una viga simplemente apoyada y con fuerzas externas. En la publicación que realizó también, trata un método para resolver el problema de condiciones frontera forzados y condiciones iniciales independientes del tiempo. Un método general para resolver la viga Timoshenko con condiciones iniciales y fuerzas externas es presentado en el libro Elastokinetics de Reismann Pawlik (1974), con la aplicación del método de eigenfunction expansion.
Un parámetro crucial en la teoría de viga de Timoshenko es el factor de forma (shape factor). También es conocido como coeficiente de cortante o factor de reducción de área. El factor de forma está en función del ratio de Poisson y de la frecuencia de vibración, así como de la signatura de la sección transversal. Generalmente, la dependencia de la frecuencia es ignorada. Davies (1948) [6], Mindlin y Deresiewicz (1954) [13], Cowper (1966) [14] y Spence y Seldin (1970) [15] proponen métodos para calcular el factor de forma como función de la forma de la sección trasversal y del cociente de Poisson. Stephen Timoshenko (1978) [16] muestra la variación del factor de forma con respecto a la frecuencia.
[image:27.612.109.515.63.266.2]Huang (1961) obtiene de manera independiente las ecuaciones de frecuencia y las expresiones para los modos de vibración para seis diferentes condiciones de frontera. Las ecuaciones de frecuencia son difíciles de resolver, excepto para el caso de una viga simplemente apoyada.
A pesar de los trabajos constantes realizados por varios autores, la teoría de vigas de Euler-Bernoulli y de Timoshenko siguen siendo muy utilizadas por las ventajas que presentan.
A continuación se presentan las conjeturas que se utilizan para las teorías antes mencionadas:
1. Se considera sólo la dirección axial, por ser mayor que en las otras dos direcciones.
2. El material es elástico (cumple con la ley de Hooke). 3. La relación de Poisson es depreciable.
4. La sección transversal es simétrica, por lo tanto el eje neutro y centroidal coinciden.
5. Los planos perpendiculares al eje neutro se mantienen perpendiculares después de ser sometidos a una deformación.
6. Los ángulos de deformación son pequeños, por lo que la teoría de pequeños ángulos puede ser utilizada.
En resumen las cuatro teorías principales para las vigas son las siguientes:
Tabla 1.2 - Comparación de las cuatro Teorías de Vigas.
Modelo de Viga Momento de Pandeo
Desplazamiento lateral
Deformación de cortante
Inercia rotatoria
Euler‐Bernoulli ✔ ✔ ✖ ✖
Rayleigh ✔ ✔ ✖ ✔
Cortante ✔ ✔ ✔ ✖
Timoshenko ✔ ✔ ✔ ✔
1.2.2 ESTUDIOS EN VIGAS AGRIETADAS
y catastrófico en el comportamiento dinámico de estructuras giratorias y causar graves daños a la maquinaria rotatoria. Por lo tanto, la detección oportuna de una grieta en el rotor evitaría potencialmente graves daños y reparaciones costosas debido a la falla de máquinas rotatorias, así como garantizar la seguridad del personal.
En estas últimas décadas, varios investigadores comenzaron a interesarse en el estudio de vigas agrietadas, sus efectos y su diagnóstico en las máquinas rotatorias, por las necesidades crecientes de la industria. Las publicaciones de revisión del estado del arte realizadas por Dimarogonas [17], Wauer [18] y Gash [19], son de una gran calidad y proporcionan una vasta información en esta área. Algunos de los estudios que se pueden realizar en ejes agrietados son mencionados a continuación.
1.2.2.1 ESTABILIDAD EN EJES FISURADOS
Resultados de estabilidad fueron presentados por Gash y Papadopoulos-Dimarogonas [20], mediante una serie de gráficas en las cuales las zonas de estabilidad de un eje con fisura que presenta el fenómeno de respiro (la abertura y cierre de la fisura dependiendo de la orientación de esta), es representada para los modos de vibración de flexión. Por otra parte el trabajo desarrollado por Huang et al. [21] para ejes que giran, presenta una gráfica donde muestra los efectos del amortiguamiento sobre la estabilidad, indicando que este tienen efecto estabilizador sobre un eje con presencia de fisura.
1.2.2.2 RESPUESTA TRANSITORIA EN EJES FISURADOS
Las máquinas rotatorias a la velocidad crítica, presentan comportamiento particular, es decir, existe un rango de velocidades que oscila entre la velocidad crítica en el cual las amplitudes de vibración pueden llegar a ser demasiado grandes. El monitoreo de la respuesta vibratoria durante el cruce por la velocidad crítica pudiera mostrar información de la presencia de una grieta por medio del análisis de la respuesta.
analizaron la respuesta teórica y experimentalmente de un sistema multi-rodamientos-rotor que contiene una grieta transversal en un multi-rodamientos-rotor. Gasch [19,26] estudió el comportamiento dinámico de un rotor simple con una grieta en la sección transversal y el comportamiento de estabilidad asociado debido a la grieta y al desbalance. Henry y Okah-Avae [27] investigaron los efectos de la gravedad y el desbalance en el comportamiento dinámico de un eje agrietado. Por otra parte, muchos estudios [22,28-33] indican el cambio en la respuesta dinámica y particularmente la tendencia del rotor para exhibir un componente armónico en el doble de velocidad de eje, cerca de la mitad de cualquier frecuencia de resonancia. De hecho, debido a la dominancia del peso del eje y a la rotación del rotor, la grieta se abre y se cierra durante una revolución completa del rotor; por lo tanto, la rigidez del eje varía en el tiempo. Este mecanismo de apertura y de cierre, que es llamado el efecto respiro, induce vibraciones en el segundo armónico y en los armónicos más altos de la velocidad de rotación en el dominio de frecuencia. Aunque la presencia de este componente del doble por revolución puede indicar la posibilidad de la presencia de una grieta, también es bien conocido que la presencia de un componente de este tipo puede ser generada por desalineamiento del eje, un eje asimétrico, la holgura de los pernos y tuercas, o una gama de otras no linealidades [32-33]. Por lo tanto, esta característica, en sí misma, no es suficiente para indicar la presencia de una grieta transversal en los rotores. De esta manera, un análisis adicional en las órbitas puede ser útil para revelar la presencia de una grieta en los ejes rotatorios [30-34]. Efectivamente, cerca del rango de velocidad de la mitad de cualquier frecuencia de resonancia, la órbita cambia de un riso sencillo a risos dobles conforme incrementa la velocidad de giro, y entonces puede aparecer un riso interno. Esta observación es la firma de la presencia de una grieta que indica el cambio en la amplitud y la fase a la mitad de cualquier velocidad de resonancia.
1.2.2.3 ANÁLISIS EN LAS FRECUENCIAS NATURALES
Varios trabajos teóricos y experimentales [22-24] realizados durante los tres últimos decenios han indicado que el cambio en las propiedades modales (frecuencias naturales y formas modales) puede ser útil para la detección de una grieta, así como para la identificación de profundidad de la grieta y su ubicación. Por otra parte, la influencia de apertura y cierre de una grieta debido a la dominancia de peso del eje para diferentes orientaciones del eje se ha investigado [22,25] y mostró la eficacia del cambio en las frecuencias naturales contra la orientación del eje para detectar la orientación del frente de la grieta.
Lee y Chung [35] presentan un método de evaluación no destructivo para la identificación de la fisura en una estructura de tipo viga unidimensional, por medio del uso de frecuencias naturales y el Método de Elemento Finito (FEM). Por otra parte Lee y Maiti [36] obtienen las frecuencias naturales por medio del conocimiento de los parámetros de la fisura y también para el problema inverso conociendo las frecuencias naturales determinaron la ubicación de la fisura para una viga Timoshenko por medio de la representación de la fisura como un resorte rotacional.
1.2.2.4 ANÁLISIS EN LOS MODOS DE VIBRACIÓN
Los modos de vibración también son afectados por la presencia de una fisura. En este caso, las mediciones de vibraciones en diferentes puntos pueden ser utilizadas con el objetivo de ubicarla y determinar su profundidad. Imam et al. [37] publicaron en 1989 la presencia de un sistema de monitoreo y detección de fisura en un rotor en línea. El sistema es también capaz de detectar fisuras durante el arranque o paro de la máquina. Esta técnica se basa en el enfoque de análisis de signaturas de vibraciones y en la modelización analítica de la dinámica del rotor. El sistema puede detectar fisuras hasta de 1% o 2% del diámetro del rotor sujeto a una carga de pandeo. El reporte también incluye una validación experimental de la técnica propuesta. Está tecnología se aplica con éxito tanto en muchos sistemas de generadores de turbinas como en bombas verticales de enfriamiento de reactores nucleares.
la fisura. Al calcular la probabilidad de las diferentes hipótesis, se puede ubicar la fisura y determinar su profundidad.
Dong et al. [39] utiliza un modelo continuo para el análisis de vibraciones e identificación de parámetros de un rotor estático con una grieta abierta, basándose en dos suposiciones: el rotor es una viga Euler-Bernoulli con sección transversal circular, y la región fisurada es modelada utilizando una flexibilidad local utilizando métodos de mecánica de la fractura. Al medir la deflexión en dos puntos simétricos y utilizando el método de identificación de envolturas, predicen la ubicación y profundidad de la fisura.
1.2.2.5 POR MEDIO DE ACOPLAMIENTO
La presencia de una grieta provoca un acoplamiento entre los diferentes modos de vibración, este fenómeno fue reportado por primera vez para vibraciones longitudinales y transversales por Papadopoulos y Dimarogonas [40] y después para flexión y vibraciones transversales.
Gounaris y Papadopoulos [41] utilizan las propiedades de acoplamiento de vibraciones inducidas por una fisura para determinar su profundidad y ubicación, en una viga Timoshenko. Una fuerza armónica es utilizada para excitar la viga, y dos mediciones se efectúan: en la dirección de la excitación, y en la dirección donde aparece el efecto de acoplamiento.
Wauer [42] deriva las ecuaciones de movimiento para una viga Timoshenko en rotación, incluyendo vibraciones axiales y torsionales, y considerando condiciones de fronteras. Se demuestra también el acoplamiento torsional y pandeo-longitudinal.
1.2.2.6 POR MEDIO DE UNA EXCITACIÓN EXTERNA
Ishida et al. [43-44] por medio de excitaciones externas a ejes fisurados rotatorios, provocan la excitación de características no lineales de la grieta, con el objetivo de identificarla. De esta manera la fisura puede ser detectada a su velocidad de operación.
Gómez-Mancilla et al. [45] utilizan picos de vibración que ocurren a fracciones racionales de la velocidad crítica de rotación fundamental, para facilitar la detección de grietas en ejes durante el arranque o paro de la maquinaria. Utilizando un rotor Jeffcott o de Laval modificado apoyado sobre chumaceras. La selección de parámetros modales permite en este modelo lineal representar características del primer modo de máquinas reales. Las evoluciones de órbitas y patrones de vibración son analizados, conduciendo a resultados útiles. Concluyen que en lugar de utilizar las componentes 1X y 2X para la detección de fisuras, el análisis de las resonancias locales (a 1/2X, 1/3X
y 1/4X) deberían de hacerse en prioridad.
1.3 DIVERSOS ENFOQUES DE MODELACIÓN APLICADOS PARA ANALIZAR
ROTORES AGRIETADOS.
Las grietas por fatiga tienen un gran potencial para causar fallas catastróficas en los ejes rotatorios. Esta falla puede interrumpir el funcionamiento correcto, eficaz y eficiente en el rendimiento de las máquinas. Este problema ha atraído la atención de los investigadores en todo el mundo. A través de diversas investigaciones se ha analizado la dinámica de los rotores agrietados, y el trabajo en esta área aún continúa. La revisión de artículos sobre el tema en la literatura se presenta de vez en cuando.
En este apartado se mencionan diversos enfoques, los cuales han sido investigados a lo largo del tiempo por reconocidos estudiosos del tema, y por consiguiente han servido como referencia para continuar generando contribuciones. Estos enfoques se pueden presentar en las siguientes subsecciones.
1.3.1 THH (TRANSFORMADA DE HILBERT‐ HUANG)
Guo y Peng [47] usaron la Transformada de Hilbert-Huang para la detección y el monitoreo de una grieta en la respuesta transitoria de un rotor agrietado. Este método es particularmente útil para la identificación de muy pequeñas profundidades de fisura. La Transformada de Hilbert-Huang tiene un buen potencial para el análisis de datos no lineales y no estacionarios, especialmente para las representaciones en el dominio del tiempo-frecuencia-energía. El THH parece ser una mejor herramienta en comparación con la Transformada Wavelet para la detección de grietas.
1.3.2 MECANISMO DEL RESPIRO
Muchos investigadores han analizado la dinámica del rotor agrietado por los enfoques basados en el mecanismo de una grieta con respiro. La grieta se abre poco a poco y se cierra durante cada revolución, en otras palabras la grieta respira durante la revolución del eje; sin embargo, aún no está del todo claro cómo el cierre parcial de la grieta interactúa con las variables clave del problema. Por lo tanto existe la necesidad de un modelo que represente el mecanismo de respiración de la grieta y, la interacción entre la carga externa y el comportamiento dinámico de la grieta concluido por Bachschmid et al. [48]. La respiración de la grieta en rotores se suele simular utilizando dos modelos bien conocidos por Patel y Darpe [49]. Uno de ellos es el modelo de fisura de switching/hinge (conmutación/bisagra), en el que la rigidez del rotor cambia (switch) de la correspondiente grieta cerrada, a la rigidez correspondiente al estado de la grieta completamente abierta. El otro modelo es el respiro de la grieta dependiente de la respuesta, modelo presentado por Jun et al. [29].
1.3.3 TRANSFORMADA WAVELET
amortiguamiento modal, etc. Zheng, Gao y Guo et al. [50] aplicaron la técnica de Transformada Wavelet para la bifurcación y el estudio del caos. La Transformada Wavelet puede revelar la propiedad local, tanto en el dominio del tiempo, como en el dominio de la frecuencia. Ellos introdujeron un método para analizar los dominios existentes de diferentes tipos de movimiento en el espacio paramétrico de un sistema no lineal.
Yang, Suh y Chan et al. [51] han trabajado en la caracterización y detección de grietas inducida por inestabilidad rotatoria. Ellos desarrollaron y presentaron un algoritmo basado en wavelets para caracterizar periodicidad, duplicación del período, y movimientos caóticos como resultado de la inherente no linealidad asociada con la apertura y cierre de la grieta durante la vibración. La característica más significativa de este algoritmo es que, es capaz de identificar de forma continua el estado de transición que marca el inicio y la propagación de la estabilidad mecánica en la dinámica de un rotor. Darpe [52] ha presentado un método para detectar la superficie de una grieta transversal en un eje rotatorio. Su método se basa en las técnicas transformada wavelet.
1.3.4 INVESTIGACIÓN A TRAVÉS DEL ENFOQUE DE ELEMENTOS FINITOS
El Análisis de Elementos Finitos (FEA por sus siglas en inglés) Tridimensional (3D) ha atraído a los investigadores como una herramienta de investigación para el estudio del mecanismo de respiro de la grieta. Debido a la facilidad en la simulación, muchos investigadores aplicaron la técnica de elementos finitos para el análisis de la grieta en ejes giratorios. Papadopoulos y Dimarogonas [40] han analizado la complianza de una grieta local para un segmento de viga agrietada de seis grados de libertad. Alternativamente, la matriz de complianza local ha sido determinada a través de un análisis de elementos finitos 3D por varios investigadores.
Sekhar y Prabhu [53] han estudiado la vibración y la fluctuación de esfuerzos en los ejes agrietados y han estudiado un eje simplemente apoyado con una grieta transversal a las características vibratorias. El Análisis de Elementos Finitos (AEF) se ha llevado a cabo para vibraciones libres y forzadas.
Mohiuddin y Khulief [55] han investigado las características de modelo de un rotor agrietado usando un elemento finito viga cónico, y deduciendo la frecuencia del rotor con varias condiciones de grieta.
Sekhar y Balaji Prasad [56] trabajaron en el análisis dinámico de un sistema de rotor teniendo una grieta sesgada en el eje. Un análisis mediante el Método del Elemento Finito (MEF) de un sistema rotor-cojinetes para la vibración a flexión se ha considerado en su trabajo y llegaron a la conclusión de que existe una tendencia general de reducción en las eigen-frecuencias de todos los modelos, con el aumento de la profundidad de la grieta. Sekhar [57], ha estudiado las características de vibración de un rotor con dos grietas abiertas, y aplica el análisis del MEF en el sistema del rotor para una vibración a flexión considerando las dos grietas transversales abiertas. Llegó a la conclusión de que en el caso de dos grietas a diferentes profundidades, la grieta más grande tiene el efecto más significativo en la frecuencia propia del rotor.
Nandi [58] ha presentado un método simple de reducción para el modelo de elementos finitos de rotores no axisimétricos en resortes no isotrópicos. Darpe [59] investigó la dinámica de un rotor Jeffcott con una grieta sesgada describiendo la matriz de flexibilidad para la grieta sesgada. Recientemente, Georgantzinos y Anifantis [60] estudiaron el efecto del mecanismo de respiro de la grieta en la flexibilidad variante en el tiempo debido a la grieta en un eje de rotatorio, considerando una aproximación cuasi-estática y usando un avanzado procedimiento de contacto MEF no lineal. Este método predice el contacto parcial de las superficies de la grieta, y es apropiado para evaluar instantáneamente la flexibilidad de la grieta.
1.3.5 ANÁLISIS A TRAVÉS DE LA DINÁMICA NO LINEAL DE UN ROTOR AGRIETADO
Bovsunovskii [63] ha hecho el estudio numérico vibraciones forzadas y en decaimiento de un sistema simulando un cuerpo con una grieta cerrada bajo la acción de diversos modos de una fuerza de restauración no lineal y una fricción viscosa lineal. En su estudio, se determinó la frecuencia natural de vibración transversal y longitudinal de una viga agrietada con la apertura y cierre de la grieta.
Feng et al. [64] trabajó para el análisis no lineal de un rotor agrietado con cabeceo (whirling). Claras diferencias se han encontrado en la bifurcación, la amplitud, la órbita, y el mapa de Poincaré cuando se llega a esta comparación. El trabajo puede ser útil en el diagnóstico y detección temprana de la grieta.
Zhu et al. [65] ha investigado la dinámica de un rotor agrietado con una chumacera magnética activa (CMA), muestra que las características dinámicas del rotor agrietado con las chumaceras magnéticas activas son claramente más complejas que las del sistema del rotor agrietado tradicional. Además comentó que el control adaptativo con CMAs puede ocultar las características de falla de un rotor agrietado, en lugar de ayudar a diagnosticar una grieta; esto dependerá de la estrategia del controlador utilizado. Es muy difícil detectar una grieta en el rotor con un sistema de apoyo CMA cuando la vibración del sistema del rotor está totalmente controlado. El monitoreo de los componentes de las súper-armónicas de 2x y 3x de rotación en la región de velocidad sub-crítica se puede utilizar como un índice para detectar una grieta en el rotor con un sistema de CMA. Si el efecto de la grieta no se tiene en cuenta en la etapa de diseño del controlador, el sistema rotor-CMA perderá su estabilidad en algunos casos cuando aparezcan grietas.
1.3.6 DESARROLLOS RECIENTES EN EL ANÁLISIS DE GRIETAS
Desde los últimos dos años, pocos artículos se han publicado, en donde se han aplicado algunos métodos y herramientas nuevas para el análisis de la dinámica del rotor y su correcta predicción. Chang et al. [68] ha estudiado la respuesta no lineal y la estabilidad dinámica de un rotor agrietado. Desarrollo las ecuaciones de movimiento no lineales que gobiernan a un sistema rotor agrietado con soportes elásticos visco-asimétricos.
Mueller y Scholz et al. [69] han presentado una comparación de los diferentes enfoques para la estimación de iniciación lenta de una grieta y comparó el diagrama de evaluación falla dependiente del tiempo (time dependent failure assessment diagram, TDFAD por sus siglas en ingles), el diagrama de dos criterios (ZCD, por sus siglas en inglés) y el modelo Nikbin -Smith Webster (NSW, por sus siglas en ingles), enfoques para la predicción del inicio de una grieta por fatiga térmica. Se ha encontrado que el TDFAD y el método NSWson costosos, pero el ZCD es un método simple. En otra literatura reciente, Dong et al. [70] introdujo un nuevo método de detección de grietas en base a la alta precisión de identificación de parámetros modales en el marco de los elementos finitos BSWI, donde se propone la descomposición modal empírica y el Wavelet de Laplace. Se identifican diez de los coeficientes de correlaciones más grandes seleccionadas y los parámetros correspondientes a la frecuencia natural y al amortiguamiento. La eficacia del método propuesto es verificada por un experimento y se identifican los parámetros de la grieta.
1.4 AVANCES Y DESARROLLOS EN EL LABORATORIO DE VIBRACIONES Y
ROTODINÁMICA DE LA SEPI‐ESIME ZACATENCO
En México existen varias instituciones y centros de investigación que trabajan en tópicos relacionados con vibraciones y rotodinámica. Actualmente el Laboratorio De Vibraciones Y Rotodinámica ESIME (fundado por el Dr. Julio Cesar Gómez Mancilla) es considerado líder nacional en investigación y desarrollo asociado con la dinámica, la lubricación aplicada y las vibraciones en maquinaría rotatoria.
A continuación se presentan algunas de las aportaciones que se han desarrollado dentro del equipo de trabajo del Laboratorio De Vibraciones Y Rotodinámica ESIME-Zacatenco, por los diversos alumnos de Maestría y Doctorado con el apoyo y colaboración de los doctores investigadores del IPN.
1.4.1 AVANCES EN ROTODINÁMICA
Trabajos sobre chumaceras hidrostáticas, hidrodinámicas o híbridas se han desarrollado en la SEPI-ESIME Zacatenco, produciendo muchos resultados y avances que se han publicado en numerosos congresos y revistas internacionales y nacionales.
Kucherenko y Gómez Mancilla [74] desarrollaron un modelo de rotor-chumacera tomando en cuenta los efectos no lineales de las fuerzas en las chumaceras. En su trabajo consideraron dos casos típicos de vibraciones autoexcitadas en turbomáquinas: steamwhirl y oilwhip. La primera de ellas es un fenómeno aerodinámico inducido por el flujo del fluido de trabajo en las etapas de potencia del disco. La segunda excitación, oilwhip, es producido por un movimiento de rotación de la película de aceite lubricante en el interior de los cojinetes.
Grandes e importantes análisis realizados por Gómez Mancilla y Nossov [76] muestran que el desalineamiento angular tienen influencia importante en el comportamiento de la maquinaria rotatoria soportada en chumaceras hidrodinámicas.
Ramírez Vargas et al. [77] analizaron el comportamiento de una chumacera corta que está sometida a presurización externa, dando como resultado un cambio radical en el comportamiento de las propiedades dinámicas de la película de lubricante. La presurización fue modelada con funciones especiales de impulso (función Delta de Dirac), tal modelación fue la primera en su tipo para problemas similares en rotodinámica.
Torres Cedillo [78] utiliza en su tesis de maestría un modelo matemático desarrollado en colaboración con Gómez-Mancilla y Meda-Campaña [79] para describir un sistema rotor-chumacera rígido con movimiento orbital pivotado. Se estudia la presurización y se calculan coeficientes rotodinámicos para diferentes presiones de inyección en función de la velocidad de operación. Se realizan comparaciones muy completas con simulaciones numéricas realizadas en SIMULINK y experimentos en la plataforma experimental Rotor Kit de Bently Nevada. En una última parte se empieza también a controlar las presiones de inyección mediante control activo.
Alan Domínguez [80], en su tesis de maestría realizó la investigación para chumaceras infinitamente largas con puertos de presurización lineales, introduciendo así los inicios para esta teoría.
José Luis Pacheco [81] y Adolfo Marín, colaboran en la realización del diseño de detalle instrumentación y experimentación para una chumacera híbrida la cual puede ser presurizada en cuatro puntos a la vez, desarrollada en el laboratorio de vibraciones y rotodinámica.
Juan Carlos Hernández [82], realizó experimentación por medio del Machine Fault Simulator, para detectar daño estructural en ejes fisurados por medio de las señales adquiridas en el software ADRE.
1.4.2 AVANCES EN DETECCIÓN DE FISURAS
En su tesis de Maestría, García Illescas [84] hizo una gran contribución en la detección de fisuras, obteniendo resultados muy interesantes tanto teóricos como experimentales. Investigó entre otras cosas la influencia de la grieta en el comportamiento dinámico del sistema rotor-chumacera debido al cambio de rigidez estructural producida por ésta. Así mismo observó que a determinadas configuraciones del sistema, la grieta puede enmascararse debido a los efectos de la película del lubricante en las chumaceras. Además, cuanto más alto sea el cambio de rigidez del eje (ΔK
ξ , ΔKη ) por la presencia de la grieta, habrá mayores y nuevos rangos de
velocidad inestables.
Gómez Mancilla y García Illescas [85], presentaron un nuevo modelo matemático poderoso para análisis cualitativos, considerando entre otras cosas los cambios de rigidez provocados por la fisura y excitaciones provocadas por las chumaceras lubricadas. Basándose en este modelo, efectuaron simulaciones numéricas que validaron experimentalmente [86], y compararon los diferentes modelos de respiro, concluyendo en la poca influencia de este.
Gómez Mancilla et al. [87] utilizan un modelo matemático de rotor Jeffcott o de Laval extendido con una fisura a la mitad para desarrollar métodos de detección de fisuras. Simulaciones numéricas demostraron lo favorable que es utilizar arranques o paros de máquinas.
Gómez Mancilla investigó después con Zambrano Reyes et al. [88-90] la fuerte influencia que tiene el ángulo existente entre el desbalance y la fisura; concluyen que las resonancias locales a 1/2x, 1/3x y 1/4x pueden ser utilizadas para detección de fisuras. Con Machorro López [91] validaron experimentalmente estas simulaciones numéricas, corroborando la fuerte interacción fisura-desbalance. Mencionan que el desalineamiento y otros problemas pueden excitar las resonancias locales, por lo que se recomienda una resta vectorial de dos corridas similares.
Entre otros aspectos, también confirmó la fuerte influencia de la orientación relativa de los vectores desbalance-doblamiento-fisura, validando a través de experimentos en donde la orientación del vector desbalance se varía, para modificar por consiguiente la orientación relativa de los vectores desbalance-doblamiento-fisura.
Zambrano Reyes et al. [93] desarrollaron un modelo matemático de rotor Jeffcott o de Laval extendido fisurado a la mitad del eje y soportado por chumaceras hidrodinámicas. Este modelo innovador consta de seis ecuaciones diferenciales lineales de segundo orden con coeficientes periódicos.
En su tesis de doctorado, Machorro López [94] desarrolla técnicas de diagnósticos de rotores fisurados utilizando una excitación externa y monitoreando la respuesta. Simulaciones numéricas en ANSYS y MATLAB, y una experimentación muy completa, le permiten comprobar sus resultados.
Jean López et al. [95] utilizó un modelo existente de rotor tipo Jeffcott y de Laval fisurado, para los que desarrolló las ecuaciones de movimiento de vibraciones transversales, y a las que le añadió términos de amortiguamiento. Estudió las frecuencias naturales del sistema y bajo qué condiciones existía inestabilidad, obteniendo como resultado una inestabilidad en la fisura en un rango de velocidades alrededor de la primera frecuencia natural del sistema, el cual aumenta con el tamaño de la fisura, aunque también logró observar que el amortiguamiento tenía un efecto estabilizador en el sistema al reducir las frecuencias naturales hasta desaparecerlas totalmente para un amortiguamiento umbral.
Capítulo 2
2.1 INTRODUCCIÓN
El método del elemento finito ha llegado a ser una herramienta poderosa en la solución numérica de un amplio rango de problemas de ingeniería. Las aplicaciones van desde el análisis por deformación y esfuerzo de automóviles, aeronaves, edificios y estructuras de puentes hasta el análisis de los campos del flujo de calor, de fluidos, magnético, filtraciones y otros problemas de flujo. Con los avances en la tecnología de las computadoras y de los sistemas CAD, pueden modelarse problemas más complejos con relativa facilidad. En una computadora pueden probarse varias configuraciones alternas antes de construir el primer prototipo. Todo esto sugiere que debemos modernizarnos empleando estos desarrollos para entender la teoría básica, las técnicas de modelado y los aspectos computacionales del método del elemento finito. En este método de análisis, una región compleja que define un continuo se discretiza en formas geométricas simples llamadas “Elementos Finitos”. Las propiedades del material y las relaciones gobernantes, son consideradas sobre esos elementos y expresadas en términos de valores desconocidos en los bordes del elemento. Un proceso de ensamble, cuando se consideran debidamente las cargas y las restricciones, da lugar a un conjunto de ecuaciones. La solución de esas ecuaciones nos da el comportamiento aproximado del continuo [97].
2.2 SISTEMAS DISCRETOS Y SISTEMAS CONTINUOS
Fig.2.1 Estructuras discreta y continua.
Como contrapartida, en los sistemas continuos no es posible separar, a priori, el sistema en un número finito de elementos discretos. Si se toma una parte cualquiera del sistema, el número de puntos de unión entre dicha parte y el resto de la estructura es infinito, y es por lo tanto imposible utilizar el mismo método que en los sistemas discretos, pues los puntos de unión entre los distintos elementos, que allí aparecían de manera natural, no existen aquí.
Las estructuras continuas son muy frecuentes en ingeniería, como por ejemplo: bastidores de máquinas, carrocerías de vehículos, losas de cimentación de edificios, vasijas de reactores, elementos de máquinas (bielas, poleas, carcasas...), y para su análisis es necesario disponer de un método que tenga en cuenta su naturaleza continua.
Hasta la llegada del Método de los Elementos Finitos (MEF), los sistemas continuos se abordaban analíticamente, pero por esa vía sólo es posible obtener solución parasistemas con geometría muy sencilla, y/o con condiciones de contorno simples. También se han utilizado técnicas de diferencias finitas, pero éstas plantean problemas cuando los contornos son complicados.
Como precursores del MEF debe citarse a Argyris y Kelsey (Stuttgart, 1955) y a Turner, Clough, Martin y Topp (Boeing, 1956), aunque con posterioridad el número de autores en el campo del MEF ha sido enorme, siendo uno de los campos de la ingeniería a los que más esfuerzos de investigación se han dedicado.