UMER. NAL c
Vol. 50, No. 6, pp. 3084–3109
A SECOND ORDER IN TIME MODIFIED LAGRANGE–GALERKIN
FINITE ELEMENT METHOD FOR THE INCOMPRESSIBLE
NAVIER–STOKES EQUATIONS
∗R. BERMEJO†, P. GAL ´AN DEL SASTRE†, AND L. SAAVEDRA‡
Dedicated to Professor J. Ildefonso D´ıaz on the occasion of his60th birthday
Abstract. We introduce a second order in time modified Lagrange–Galerkin (MLG) method for the time dependent incompressible Navier–Stokes equations. The main ingredient of the new method is the scheme proposed to calculate in a more efficient manner the Galerkin projection of the functions transported along the characteristic curves of the transport operator. We present error estimates for velocity and pressure in the framework of mixed finite elements when either the mini-element or the
P2/P1 Taylor–Hood element are used.
Key words. Lagrange–Galerkin, Navier–Stokes equations, mixed finite elements
AMS subject classifications.65M12, 65M25, 65M60
DOI.10.1137/11085548X
1. Introduction.
The Lagrange–Galerkin (LG) method was introduced in the
early 1980s by [6], [17], and [8] (see also [9]) to calculate a numerical solution of time
dependent convection-diffusion problems, including the incompressible Navier–Stokes
equations, represented by a differential equation of the form
Dv
Dt
+
Av
=
f,
where
DtD:=
∂t∂+
u
· ∇
,
u
being a flow velocity, is the so-called transport operator,
and
A
is a second order elliptic operator modeling the diffusion mechanism. The
idea of this method is to combine an implicit backward in time discretization of the
differential equation, along the characteristic curves of the transport operator, with
a Galerkin projection in the framework of finite element methods (note that such an
idea is also applicable in the context of spectral methods or hp-finite element methods;
see, for instance, [19] and [10]), yielding in this way a marching in time procedure
that may be very efficient for the following reasons: (i) the method partially
circum-vents the troubles caused by the convective terms because discretizing backward along
the characteristic curves is a natural way of introducing upwinding in the space
dis-cretization of the differential equation; (ii) the resulting system of algebraic equations
is symmetric and linear if the operator
A
is also, with a moderate condition
num-ber; (iii) the method is unconditionally stable if the Galerkin projection is performed
exactly; this allows us to use a large time step Δ
t
in the calculations.
Nevertheless, the LG method has several drawbacks: (i) the calculation of the
feet of the characteristic curves at every time step; this requires solving, backward in
∗Received by the editors November 16, 2011; accepted for publication (in revised form) August 3,
2012; published electronically November 29, 2012. This work was supported by the Ministerio de Educaci´on y Ciencia de Espa˜na via grants CGL2007-66440-CO4-01 and ENE2005-09190-C04-01/CON.
http://www.siam.org/journals/sinum/50-6/85548.html
†Departamento Matem´atica Aplicada ETSII, Universidad Polit´ecnica de Madrid, 28006 Madrid,
Spain ([email protected], [email protected]).
‡Departamento Fundamentos Matem´aticos ETSIA, Universidad Polit´ecnica de Madrid, 28040
Madrid, Spain ([email protected]).
3084
time, many systems of ordinary differential equations (ODEs); and (ii) the calculation
of some integrals, which come from the Galerkin projection, whose integrands are the
product of functions defined in two different meshes. The first shortcoming is in some
way related to the second because the integrals have to be computed exactly, but in
general it cannot be done this way and they have to be numerically calculated with
high accuracy to keep the method stable; see, in this respect, [2] where a study on
the behavior of the method with different quadrature rules is performed. The use of
high order quadrature rules means that many quadrature points per element should
be employed to evaluate the integrals, and, therefore, since each quadrature point has
an associated departure point, many systems of ODEs have to be solved numerically
at every time step; hence, the whole procedure may become less efficient than it looks
at first, in particular when working in unstructured meshes, because the numerical
calculation of the feet of the characteristic curves requires locating and identifying of
the elements containing such points, and this task is not easy to do in such meshes.
In [3] we introduced modified Lagrange–Galerkin (MLG) methods to partly
over-come drawback (ii) of the conventional LG method while maintaining its rate of
convergence when linear or quadratic finite elements are employed. The goal of this
paper is to describe and analyze the convergence of an MLG method when it is applied
to integrate the time dependent incompressible Navier–Stokes equations; in
particu-lar, we shall study the MLG method combined with the backward differentiation
formula of order 2 (BDF2) as a time stepping scheme. The LG method combined
with the BDF2 in a finite element context was presented for the first time in [7] to
integrate convection diffusion problems; later on, [5] applied this method to integrate
the incompressible Navier–Stokes equations.
We introduce some notation about the functional spaces we use in the paper. For
s
≥
0 real and real 1
≤
p
≤ ∞
,
W
s,p(
D
) denotes the real Sobolev spaces defined
on
D
for scalar real-valued functions.
·
Ws,p(D)and
|·|
Ws,p(D)denote the norm and
seminorm, respectively, of
W
s,p(
D
). When
s
= 0,
W
0,p(
D
) :=
L
p(
D
). For
p
= 2,
the spaces
W
s,2(
D
) are denoted by
H
s(
D
), which are real Hilbert spaces with inner
product (
·
,
·
)
s. For
s
= 0,
H
0(
D
) :=
L
2(
D
), the inner product in
L
2(
D
) is denoted by
(
·
,
·
).
H
01(
D
) is the space of functions of
H
1(
D
) which vanish on the boundary
∂D
in
the sense of trace.
H
−1denotes the dual of
H
01(
D
). The corresponding spaces of real
vector-valued functions,
v
:
D
→
R
d,
d >
1 integer, are denoted by boldface letters,
for instance,
W
s,p(
D
) := (
W
s,p(
D
))
d:=
{
v
:
D
→
R
d:
v
i∈
W
s,p(
D
)
,
1
≤
i
≤
d
}
.
Let
X
be a real Banach space (
X,
·
X). If
v
: (0
, T
)
→
X
is a strongly measurable
function with values in
X
, we set
v
Lp(0,t;X)
= (
t0
v
(
τ
)
p X
dτ
)
1/p
for 1
≤
p <
∞
, and
v
L∞(0,t;X)
=
ess
sup
0<τ≤tv
(
τ
)
X
; when
t
=
T
, we shall write, unless otherwise
stated,
v
Lp(X)
. We shall also use the following discrete norms:
v
lp(X)
=
Δ
t
N
i=1
v
(
τ
i)
p X 1/p
,
v
l∞(X)
= max
1≤i≤N
v
(
τ
i)
X
.
Finally, we shall also make use of the space of continuous and bounded functions
in time with values in
X
denoted by
C
([0
, T
];
X
), and the space
C
r,1(
D
),
r
≥
0, of
functions defined in the closure of D,
r
-times differentiable and with the
r
th derivative
being Lipschitz continuous.
The layout of the paper is as follows. In section 2 we introduce the continuous
problem and its functional framework. In section 3 we describe the application of the
MLG–BDF2 method to resolve the Navier–Stokes equations, using either the so-called
3086
R. BERMEJO, P. GAL ´AN DEL SASTRE, AND L. SAAVEDRAmini-element or
P
2/P
1Taylor–Hood element. Section 4 is devoted to the numerical
analysis of the method.
2. The continuous problem.
Let
D
⊂
R
d(
d
= 2 or 3) be a bounded domain
with smooth boundary
∂D
, and let [0
, T
] denote a time interval. For further
informa-tion on the regularity hypotheses and the existence and uniqueness of the soluinforma-tions
of the Navier–Stokes equations, see [13] and [20]. In
Q
T:=
D
×
(0
, T
) we consider
the Navier–Stokes equations for a fluid of constant density
ρ
(for simplicity we take
ρ
= 1) under the action of an external force field
f
(
x, t
) and with the known initial
velocity,
u
(
x,
0) =
u
0(
x
),
(2.1)
∂u
∂t
+ (
u
· ∇
)
u
+
∇
p
−
ν
Δ
u
=
f,
div
u
= 0
, u
|
∂D= 0
,
where
u
:
D
×
[0
, T
)
→
R
dis the flow velocity,
p
:
D
×
(0
, T
)
→
R
is the
pres-sure, and
f
:
D
×
(0
, T
)
→
R
ddenotes the density of the body forces per unit of
mass.
ν >
0 is the kinematic viscosity coefficient, which is assumed to be
con-stant. For the mathematical and numerical analysis of the solutions of (2.1) the
following functional spaces are needed:
V
:=
u
∈
H
10(
D
) : div
u
= 0 in
D
,
H
:=
u
∈
L
2(
D
) : div
u
= 0 in
D
and
n
·
u
= 0 on
∂D
, where
n
is the unit outward
nor-mal to
∂D
,
L
20(
D
) :=
q
∈
L
2(
D
) :
Dq
= 0
.
. To calculate a numerical solution to
(2.1) we use the following weak formulation [20].
Given
f
∈
L
2(
H
−1)
and
u
0∈
H
, find
u
∈
L
2(
H
10(
D
))
∩
L
∞(
L
2(
D
))
and
p
∈
L
2(
L
20(
D
))
such that for all
v
∈
H
01(
D
)
and
q
∈
L
20(
D
)
,
(2.2)
⎧
⎪
⎨
⎪
⎩
d
dt
(
u, v
) + ((
u
· ∇
)
u, v
) +
ν
(
∇
u,
∇
v
)
−
(
p,
div
v
) = (
f, v
)
,
(div
u, q
) = 0
.
2.1. Semidiscrete BDF2 Lagrangian formulation of the Navier–Stokes
equations.
To motivate the introduction of the MLG–BDF2 method, we present
the BDF2 discretization of the Navier–Stokes equations, backward in time, along the
characteristics of the operator
DtDin an interval
I
τ:= [
τ, s
]
⊂
[0
, T
],
s > τ
. To this
end, we consider the mapping
x
∈
D
→
X
(
x, s
;
t
)
∈
D, t
∈
I
τ, defined by the initial
value problem
(2.3a)
⎧
⎪
⎨
⎪
⎩
dX
dt
=
u
(
X
(
x, s
;
t
)
, t
)
,
X
(
x, s
;
s
) =
x.
If
u
∈
L
1(
τ, s
;
W
1,∞(
D
)), this problem has a unique solution of the form
(2.3b)
X
(
x, s
;
t
) =
x
+
ts
u
(
X
(
x, s
;
τ
)
, τ
)
dτ.
t
→
X
(
x, s
;
t
) is a characteristic curve that represents the trajectory of a fluid particle
that at time
s
will be at
x
. It is worth remarking that the mapping
X
(
x, s
;
t
) has
the group property; i.e., let
t
1and
t
2∈
I
τ,
t
1< t
2; then
X
(
x, s
;
t
1) =
X
(
·
, t
2;
t
1)
◦
X
(
x, s
;
t
2). Hereafter, to simplify the writing of the formulas, unless otherwise stated,
we adopt the notation
X
k,l(
x
) :=
X
(
x, t
l
;
t
k),
k
and
l
being positive integers. The
following results, which are needed below, are well known.
Lemma 2.1.
Assume that
u
∈
L
∞(
W
1,∞(
D
))
and
s
−
τ
is sufficiently small;
then
x
∈
D
→
X
(
x, s
;
t
)
is a quasi-isometric homeomorphism of
D
onto
D
and its
Jacobian determinant
J
= 1
almost everywhere (
a.e.
) in
D
. Moreover,
K
u−1|
x
−
z
| ≤ |
X
(
x, s
;
τ
)
−
X
(
z, s
;
τ
)
| ≤
K
u|
x
−
z
|
,
where
K
u= exp((
s
−
τ
)
∇
u
L∞(0,T;L∞(D))
)
and
|
a
−
b
|
denotes the Euclidean distance
between the points
a
and
b
∈
R
d.
For a proof of this lemma see [18].
In the following lemma we put together
some facts concerning the solution of (2.3a) which are standard in the theory of ODE
systems.
Lemma 2.2.
Assume that
u
∈
L
∞(
W
k,∞(
D
))
, k
≥
1
. Then for any integer
n
,
0
≤
n
≤
N
−
1
, the unique solution
t
→
X
(
x, t
n+1;
t
) (
t
∈
[
t
n, t
n+1]
⊂
[0
, T
])
of
(2
.
3
a
)
is such that
X
(
x, t
n+1;
t
)
∈
W
1,∞(
W
k,∞(
D
))
. Furthermore, let the multi-index
α
∈
N
d; then for all
α
such that
1
≤ |
α
| ≤
k
,
∂
x|αj|X
i(
x, t
n+1;
t
)
∈
C
([0
, T
];
L
∞(
D
×
[0
, T
]))
,
1
≤
i, j
≤
d
.
Let 0 =
t
1< t
2<
· · ·
< t
N=
T
be a uniform partition of step Δ
t
of the interval
[0
, T
]. For
x
fixed let us consider the differential equation
dy
(
x, t
)
dt
=
f
(
y, t
)
,
t
∈
(0
, T
];
the BDF2 discretization of this equation at time
t
n+1is of the form
d
ty
(
x, t
n+1) =
f
(
y
(
x, t
n+1)
, t
n+1)
,
where
d
ty
(
x, t
n+1) :=
3
y
(
x, t
n+1)
−
4
y
(
x, t
n) +
y
(
x, t
n−1)
2Δ
t
;
then, noting that
X
n+1,n+1(
x
) =
x
, the BDF2 discretization of (2.1) along the
char-acteristics curves in the interval
I
n= [
t
n, t
n+1] is [5]
(2.4)
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
d
tu
(
X
n+1,n+1(
x
)
, t
n+1) +
∇
p
(
x, t
n+1) =
ν
Δ
u
(
x, t
n+1) +
f
(
x, t
n+1)
,
div
u
(
x, t
n+1) = 0
,
u
(
x, t
n+1)
|
∂D= 0
,
where
d
tu
(
X
n+1,n+1(
x
)
, t
n+1) :=
3
u
(
x, t
n+1)
−
4
u
(
X
n,n+1(
x
)
, t
n) +
u
(
X
n−1,n+1(
x
)
, t
n−1)
2Δ
t
is the BDF2 discretization of the total derivative
DuDt.
3. The MLG–BDF2 method.
In this section we describe the MLG–BDF2
method in a finite element framework. To do so, we introduce the finite element
spaces, where the numerical solution is sought, and some of their properties needed
for the analysis of the method.
3088
R. BERMEJO, P. GAL ´AN DEL SASTRE, AND L. SAAVEDRA3.1. Finite element spaces.
We consider a family of regular quasi-uniform
partitions
D
hof the region
D
which are formed by simplices. However, if
∂D
was
not a polyhedral surface (polygonal line), it would be possible to use curved elements
near the boundary: the element touching the boundary would have at least a curved
face (side). (See [4] for the theory on curved elements.) As is usual in the finite
element technique, we consider the reference element,
T
:=
{
x
∈
R
d: 0
≤
x
i≤
1
,
1
−
di=1x
i≥
0
}
, such that for each
T
jthere exists an invertible affine mapping
F
j:
T
→
T
jof the form
(3.1)
F
j(
x
) =
B
jx
+
b
j,
B
j∈ L
(
R
d)
,
and
b
j∈
R
d.
We associate with
D
hthe
H
1-conforming finite element spaces
Wh
and
M
h⊂
L
20(
D
).
We shall approximate the velocity in
Xh
:=
Wh
∩
H
10(
D
) and the pressure in
M
h.
Moreover, we assume that the spaces
Xh
and
M
hhave the following properties:
(P1) (Ladyzhenskaia–Babuˇska–Brezzi condition). There exists a positive constant
β
independent of the discretization parameter
h
such that
(3.2a)
inf
qh∈Mhv
sup
h∈Xh
(div
v
h, q
h)
v
hH1(D)
q
hL2(D)
≥
β.
(P2) The elements of the spaces
Xh
and
M
hare piecewise polynomials of degrees
m
and
l
, respectively; then assuming that
v
∈
H
s+1(
D
)
∩
H
10(
D
), there exists a
constant
C
1independent of
h
such that
(3.2b)
inf
vh∈Xhv
−
v
hL2(D)
+
h
v
−
v
hH1(D)
≤
C
1h
s+1v
Hs+1(D)
,
0
≤
s
≤
m.
(P3) Assuming that
p
∈
H
s1+1(
D
)
,
0
≤
s
1
≤
l
, there exists a constant
C
2independent of
h
such that
(3.2c)
inf
qh∈Mh
p
−
q
hL2(D)
+
h
p
−
q
hH1(D)
≤
C
2h
s1+1p
Hs1+1(D)
.
(P4) (inverse property). There exist positive constants
C
3and
C
independent of
h
such that for
v
h∈
Xh
,
(3.2d)
v
hWm,q(D)
≤
C
3h
d/q−d/p+k−m
v
h
Wk,p(D)
,
0
≤
k
≤
m
≤
1
,
0
≤
p
≤
q
≤ ∞
,
and
(3.2e)
v
hL∞(D)
≤
D
(
h
)
v
hH1(D)
;
D
(
h
) :=
C
(1 +
|
log
h
|
1/2) if
d
= 2
,
Ch
−1/2if
d
= 3
.
Specifically, we shall consider the
P
2/P
1Taylor–Hood finite element and the so-called
mini-element as examples of the spaces (
Xh
, M
h).
3.2. The formulation of the MLG–BDF2 method.
We are ready to
formu-late the MLG–BDF2 method to approximate the weak solution of (2.4) in the finite
element spaces (
Xh
,
M
h). The statement of the method is as follows.
For
n
= 1
,
2
, . . . , N
−
1
, find
(
u
nh+1, p
nh+1)
∈
Xh
×
M
hsuch that for any
v
h∈
Xh
and
q
h∈
M
hthey are the unique solution to
(3.3)
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
3
u
nh+1−
4
u
n h(
X
n,n+1
h
(
x
)) +
u
n−1 h(
X
n−1,n+1 h
(
x
))
2Δ
t
, v
h+
ν
∇
u
nh+1,
∇
v
h−
(
p
nh+1,
div
v
h) = (
f
n+1, v
h)
,
div
u
nh+1, q
h= 0
.
Since (
u
nh−l(
X
hn−l,n+1(
x
))
, v
h)=
j
Tj
u
n−l h
(
X
n−l,n+1
h
(
x
))
·
v
h(
x
)
dx
,
l
= 0
,
1, the
calculations of
Tj
u
n−l h
(
X
n−l,n+1
h
(
x
))
·
v
h(
x
)
dx
and
X
hn−l,n+1(
x
) are key issues.
Remark
3.1.
To initialize the calculations in (3.3) we need to know
u
0h
and
(
u
1h, p
1h). We assume that
u
1hand
p
1hare calculated by a second order in time single
step scheme, and (
u
0h, p
0h) by the scheme proposed in [1].
3.2.1. The points
X
hn−l,n+1(
x
)
, l
= 0
,
1.
For
x
∈
D
, the points
X
hn−l,n+1(
x
)
are approximations to the points
X
hn−l,n+1(
x
) which are numerical solutions at time
instants
t
n−lof the initial value problem
(3.4)
⎧
⎪
⎨
⎪
⎩
dX
h(
x, t
n+1;
t
)
dt
=
u
h(
X
h(
x, t
n+1;
t
)
, t
)
, t
n−l≤
t < t
n+1,
X
h(
x, t
n+1;
t
n+1) =
x,
where
u
h(
x, t
) is usually calculated by some extrapolation/interpolation formula of the
values
u
nh
and
u
n−1h
. Note that
u
h(
x, t
) is in
C
([
t
n−1, t
n+1];
W
1,∞(
D
)) because
u
nh,
u
nh−1are in
W
1,∞(
D
). Given the element
T
jof
D
h, we define the elements
T
hjn−l,n+1(resp.,
T
jn−l,n+1) by
T
hjn−l,n+1:=
X
hn−l,n+1(
T
j) (resp.,
T
jn−l,n+1:=
X
n−l,n+1(
T
j)),
and under the assumption of Lemma 2.2 we can define the quasi-isometric mappings
F
hjn−l,n+1:
T
→
T
hjn−l,n+1of class
C
0,1and
F
n−l,n+1j
:
T
→
T
n−l,n+1j
of class
C
k−1,1,
k
≥
1 integer, such that for all
x
∈
T
and
x
=
F
j(
x
)
∈
T
j(3.5a)
F
hjn−l,n+1(
x
) =
X
hn−l,n+1◦
F
j(
x
) =
X
hn−l,n+1(
x
)
,
F
jn−l,n+1(
x
) =
X
n−l,n+1◦
F
j
(
x
) =
X
n−l,n+1(
x
)
.
In relation to the simplices
T
hjn−l,n+1, we also consider the simplices
T
hjn−l,n+1of
ver-tices
{
X
hn−l,n+1(
a
1(j))
, . . . , X
hn−l,n+1(
a
(dj+1))
}
, with
{
a
i(j)}
1≤i≤d+1being the vertices of
the element
T
j, and define the invertible affine mappings
F
hjn−l,n+1:
T
→
T
hjn−l,n+1such that
(3.5b)
F
hjn−l,n+1(
x
) =
B
hjn−l,n+1x
+
b
nhj−l,n+1,
where
B
nhj−l,n+1∈ L
(
R
d) and
b
hjn−l,n+1∈
R
d. Similarly, for
T
jn−l,n+1and
F
jn−l,n+1,
we define the simplices
T
jn−l,n+1, with vertices
{
X
n−l,n+1(
a
(j)1
)
, . . . , X
n−l,n+1(
a
(dj+1))
}
,
and the invertible affine mappings
F
jn−l,n+1:
T
→
T
jn−l,n+1by
(3.5c)
F
jn−l,n+1(
x
) =
B
jn−l,n+1x
+
b
nj−l,n+1.
3090
R. BERMEJO, P. GAL ´AN DEL SASTRE, AND L. SAAVEDRANote that
T
hjn−l,n+1and
T
jn−l,n+1are linear approximations to
T
hjn−l,n+1and
T
jn−l,n+1,
respectively, and hence
(3.5d)
F
hjn−l,n+1=
IF
hjn−l,n+1and
F
jn−l,n+1=
IF
jn−l,n+1,
where
I
denotes the linear interpolant in
T
. Next, we define the mappings
X
jn−l,n+1:
T
j→
T
n−l,n+1 jand
X
n−l,n+1
hj
:
T
j→
T
n−l,n+1 hjby
(3.5e)
X
jn−l,n+1(
x
) =
F
jn−l,n+1(
x
) =
F
jn−l,n+1◦
F
j−1(
x
)
,
X
hjn−l,n+1(
x
) =
F
hjn−l,n+1(
x
) =
F
hjn−l,n+1◦
F
j−1(
x
)
and construct the mappings
X
n−l,n+1:
D
→
T
jn−l,n+1and
X
hn−l,n+1:
D
→
T
jn−l,n+1such that
(3.5f)
X
n−l,n+1(
x
) =
X
jn−l,n+1(
x
)
,
X
hn−l,n+1(
x
) =
X
hjn−l,n+1(
x
) when
x
∈
T
j.
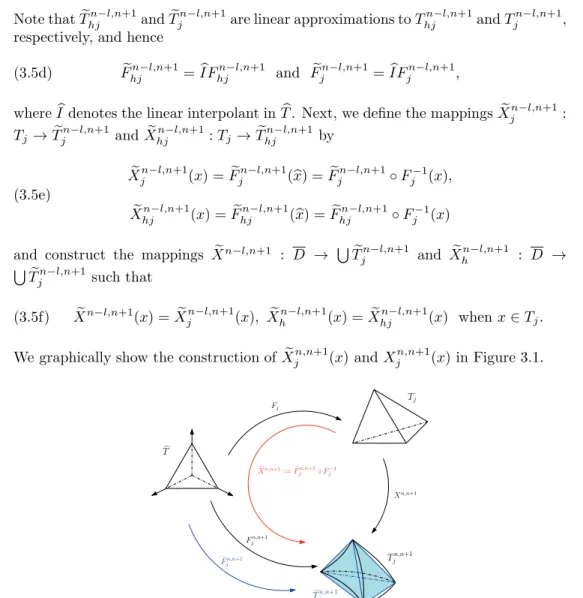
We graphically show the construction of
X
jn,n+1(
x
) and
X
jn,n+1(
x
) in Figure 3.1.
Tn,n+1
j Tj
T
Tn,n+1
j
Fj
Xn,n+1
Fn,n+1 j
Xn,n+1:=Fn,n+1
j ◦Fj−1
Fn,n+1 j
Fig. 3.1. The pointsXn,n+1
j (x)and Xjn,n+1(x)and the mappings for the formulation of the
MLG method. Xjn,n+1(x) is in the plane face tetrahedron and Xjn,n+1(x) is in the curved face tetrahedron.
Remark
3.2.
We note that if
D
is either a polygon or a polyhedron and
T
bis
a boundary element, i.e.,
T
b∩
∂D
= Γ
b⊂
∂D
, then
T
bn−l,n+1=
X
n−l,n+1(
T
b) and
T
bn−l,n+1=
X
n−l,n+1(
T
b) are also boundary elements satisfying
T
bn−l,n+1∩
∂D
=
T
bn−l,n+1∩
∂D
= Γ
bbecause
u
= 0 on the boundary; for the same reasons, the
inter-section of
T
hbn−l,n+1with
∂D
is also Γ
b; consequently,
D
=
∪
T
jn−l,n+1=
∪
T
n−l,n+1 hj
.
However, if
∂D
were a curved boundary, then by construction,
T
bn−l,n+1∩
∂D
= Γ
bwould be a curved face which, in general, is different from the boundary face
Γ
nb−l,n+1of
T
hbn−l,n+1because the latter is a straight
d
−
1 simplex. Nevertheless,
Γ
nb−l,n+1in-tersects Γ
bat its vertices. All the developments that follow are still valid for the case
with curved boundary if one makes additional assumptions and uses the techniques
of [4].
3.2.2. Calculation of
Tj
u
n−l
h
(
X
hn−l,n+1(
x
))
·
v
h(
x
)
dx, l
= 0
,
1.
The
evaluation of the element integrals is usually done numerically by applying a
quadra-ture rule of high order, so as to maintain both the stability and the accuracy that the
method would possess if the integrals were calculated exactly. Since
u
nh−l∈
X
h,
u
nh−l(
x
) =
Mi=1
U
in−lφ
i(
x
)
,
where
{
φ
i}
Mi=1is the set of global basis functions of
X
hand
U
in−l=
u
n−lh
(
x
i), with
x
ibeing the
i
th mesh node. The restriction of
u
nh−lon the element
T
jis written as
u
nh−l(
x
)
|
Tj=
nek=1
U
kn(−j)lϕ
(kj)(
x
)
,
where
ne
is the number of velocity nodes in
T
j,
k
(
j
) denotes the global number of
the node of the mesh
D
hthat is the
k
th node of
T
j, and
{
ϕ
( j) k}
ne
k=1
is the set of local
basis functions for the element
T
j. As is customary in the finite element technique, we
employ the element of reference
T
to calculate the integral over the element
T
j. Thus,
assuming that for
x
∈
T
j,
X
n−l,n+1
h
(
x
) is in some simplex
T
iof the fixed partition
D
h, in general
T
i=
T
j, then
u
hn−l(
X
hn−l,n+1(
x
)) =
nek=1
U
n−l k(i)ϕ
(i)
k
(
X
n−l,n+1h
(
x
)), and
taking
v
h(
x
) =
ϕ
( j)p
(
x
)
,
1
≤
p
≤
ne
, we have
Tj
u
nh−l(
X
hn−l,n+1(
x
))
·
v
h(
x
)
dx
=
nek=1
U
kn(−i)lTj
ϕ
(ki)(
X
hn−l,n+1(
x
))
ϕ
(pj)(
x
)
dx.
By (3.5e) and the assumption
X
hn−l,n+1(
x
)
∈
T
i,
Tj
ϕ
(ki)(
X
hn−l,n+1(
x
))
ϕ
(pj)(
x
)
dx
=
T
ϕ
k(
z
)
ϕ
p(
x
)
∂F
j∂
x
d
x,
where
z
:=
F
i−1◦
F
hjn−l,n+1(
x
). Finally, we approximate the integrals over
T
by high
order quadrature rules as
T
ϕ
k(
z
)
ϕ
p(
x
)
∂F
j∂
x
d
x
meas
(
T
j)
nqpg=1
g
ϕ
k(
z
g)
ϕ
p(
x
g)
,
where
nqp
denotes the number of weights,
g
, and points,
x
g, of the quadrature rule.
Remark
3.3.
Note that in order to calculate the integrals it is necessary to define
the triangle
T
hjn−l,n+1; this is done by computing at time
t
n−lthe points
X
hn−l,n+1(
a
(j)
i
)
as solutions of (3.4); this means that the number of departure points to be calculated
every time step is
N V
, the number of vertex nodes, whereas in the conventional LG
method such a number is
N E
×
nqp
, which is much larger than
N V
because
nqp
is
quite large in high order quadrature rules, in particular in three-dimensional problems.
Since the integration of (3.4) and the identification of the element that contains the
solution point are costly parts of the method, the MLG methods are more efficient in
terms of CPU time than the conventional LG methods.
3092
R. BERMEJO, P. GAL ´AN DEL SASTRE, AND L. SAAVEDRA4. Convergence of the MLG–BDF2 method.
In this section we perform
the error analysis of the method following a step by step approach. First, we
re-call auxiliary results concerning the convergence of the semidiscrete Stokes problem;
second, we study the error of the approximation of the departure points and some
related results, considering that the system (3.4) is integrated by a Runge–Kutta
scheme of order
r
≥
2; third, we end up establishing the convergence of the method
in the
l
∞(
L
2(
D
)) and
l
∞(
H
1(
D
)) norms for the velocity and
l
2(
L
2(
D
)) norm for the
pressure. In the developments that follow we need the finite dimensional space
Vh
defined as
Vh
=
{
v
h∈
Xh
: (div
v
h, q
h) = 0
∀
q
h∈
M
h}
.
Let (
u
(
t
)
, p
(
t
)) be the weak solution to (2.1). We define
w
h: [0
, T
]
→
Xh
and
μ
h: [0
, T
]
→
M
has the solution of the semidiscrete Stokes problem
(4.1)
⎧
⎨
⎩
ν
(
∇
(
u
(
t
)
−
w
h(
t
))
,
∇
v
h)
−
(
p
(
t
)
−
μ
h(
t
)
,
div
v
h) = 0
∀
v
h∈
Vh
,
(div(
u
(
t
)
−
w
h(
t
))
, q
h) = 0
∀
q
h∈
M
h.
We have the following results (see [11, Chap 2]).
Lemma 4.1.
Let
u
∈
L
γ(
V
∩
H
s+1(
D
))
and
p
∈
L
γ(
L
20(
D
)
∩
H
s1+1(
D
))
,
γ
∈
[1
,
∞
]
. Then there exist positive bounded constants
C
7and
C
8independent of
Δ
t
and
h
such that
(4.2)
u
−
w
hLγ(L2(D))
+
h
u
−
w
hLγ(H1(D))
+
p
−
μ
hLγ(L2(D))
≤
C
7h
s+1u
Lγ(Hs+1(D))
+
C
8ν
h
s1+2
p
Lγ(Hs1+1(D))
.
Besides this lemma we need the following one that can be found in [12].
Lemma 4.2.
Let the domain
D
be such that for
b > d
and
g
in
L
b(
D
)
, the solution
(
u, p
)
of the Stokes problem
−
ν
Δ
u
+
∇
p
=
g,
div
u
= 0
in
D
,
u
|
∂D= 0
is in
W
2,b(
D
)
×
W
1,b(
D
)
with continuous dependence on
g
, and assume that
D
his a
quasi-uniform regular partition of
D
. If
(
u, p
)
∈
L
γ(
W
1,∞(
D
))
×
L
γ(
L
∞(
D
))
, there
is a constant
C
independent of
h, u
, and
p
such that
(4.3)
∇
(
u
−
w
h)
L∞(D)
+
p
−
μ
hL∞(D)
≤
C
inf
(vh,qh)∈Xh×Mh∇
(
u
−
v
h)
L∞(D)
+
p
−
q
hL∞(D)
.
We introduce the notations
u
t:=
∂u∂tand
D
tku
:=
DkuDtk
,
k
≥
1. For the Taylor–
Hood elements,
l
=
m
−
1; specifically, for the
P
2/P
1element,
m
= 2 and
l
= 1. As
for the mini-element,
l
= 1, whereas the polynomials for the velocity in an element
T
belong to
P
1(
T
)
spanΠ
di=1+1ϕ
i; however, in the velocity error estimates for this
element,
m
= 1; see [11]. To proceed with the analysis we state the following regularity
hypotheses:
(R1)
u
0∈
H
m+1(
D
)
∩
W
2,∞(
D
)
∩
V
.
(R2)
u
∈
L
∞(
V
∩
H
m+1(
D
)
∩
W
2,∞(
D
))
∩
C
(
C
0,1(
D
)),
u
t
∈
L
2(
V
∩
H
m+1(
D
));
D
t2u
; and
D
3tu
∈
L
2(
L
2(
D
));
p
∈
L
∞(
H
m(
D
)
∩
L
20