Comparación de algoritmos de Rendezvous sincrónicos de redes de radio cognitiva
71
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Comparación de algoritmos de Rendezvous sincrónicos de redes de radio cognitiva. Autor: Yadalis Robaina Vega [email protected] Tutor: Msc. Erik Ortiz Guerra [email protected]. Santa Clara 2015 "Año 57 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. La mente que se abre a una nueva idea, jamás volverá a su tamaño original. Albert Einstein.
(5) ii. DEDICATORIA. A mis padres, por ser los genuinos inspiradores de esta obra que se convierte en realidad..
(6) iii. AGRADECIMIENTOS. A mi familia, en especial a mis padres que han dado tanto para que se hagan realidad mis aspiraciones. A mi tutor, Erik Ortiz Guerra por su incondicional apoyo, dedicación y exigencia. A Andrés, por su cariño incondicional y su apoyo alentador. A mis amigos, por compartir junto a mí las alegrías y las tristezas..
(7) iv. TAREA TÉCNICA Con la intención de cumplir con los objetivos trazados en esta tesis, se tuvo en cuenta las siguientes tareas técnicas para la confección del informe: 1.. Realización de un estudio acerca de las características y funciones de las redes de. radio cognitiva. 2.. Identificación de las ventajas de la utilización del sincronismo en las redes de radio. cognitiva fundamentalmente para el logro del Rendezvous. 3.. Descripción de algoritmos de Rendezvous sincrónicos de redes de radio cognitiva.. 4.. Análisis de las métricas a tener en cuenta para la evaluación del desempeño de estos. algoritmos. 5.. Implementación utilizando el asistente matemático Matlab de los algoritmos de. Rendezvous seleccionados en diferentes escenarios de simulación. 6.. Comparación de dichos algoritmos en base a los resultados obtenidos.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN La Radio Cognitiva surge como una solución para reutilizar de manera eficiente las bandas subutilizadas del espectro radioeléctrico. Un objetivo indispensable de las redes cognitivas es lograr el Rendezvous entre los usuarios cognitivos en el menor tiempo posible. La utilización del sincronismo de tiempo en estas redes propicia que el tiempo necesario para lograr el Rendezvous sea finito y relativamente corto en comparación con el obtenido en una red sin sincronización de tiempo. En este trabajo son estudiados los sistemas de quórum cíclicos y su utilización en la construcción de algoritmos de Rendezvous sincrónicos. Se estudian cuatro algoritmos de Rendezvous sincrónicos: dos basados en sistemas de quórums cíclicos, M-QCH y L-QCH; se describe el algoritmo basado en roles RCCH y además el algoritmo ETCH. El estudio se centra en la evaluación dos métricas de desempeño, el MTTR y el ETTR. Mediante el software Matlab fueron desarrollados los simuladores de eventos discretos necesarios para simular y evaluar el desempeño de cada uno de los algoritmos presentados. Los resultados obtenidos muestran la superioridad del M-QCH con respecto al resto de los algoritmos para ambas métricas, en contrapartida con el ETCH que muestra los resultados menos alentadores. M-QCH y L-QCH a pesar de que ambas se construyen a partir del sistema QCH, el hecho de utilizar matrices de quórums diferentes propicia que los resultados de ambas en términos de MTTR y ETTR sean diferentes. RCCH debido al hecho de que es un algoritmo basado en roles, muestra buenos resultado en términos de las métricas mencionadas..
(9) vi. LISTA DE ABREVIATURAS ACH. Salto de Canal asincrónico (Asynchronous Channel Hopping). CCC. Técnica de canal de control común (Common Control Channel). CH. Técnica de saltos de canales (Channel Hopping). CRAHN. Redes ad-hoc radio cognitivas (Cognitive Radio Ad-Hoc Networks). DRSEQ. Algoritmo de secuencias de Rendezvous determinísticas (Deterministic Rendezvous Sequence). DSA. Acceso dinámico al espectro (Dynamic Spectrum Access). DSAP. Punto de acceso al servicio al destino (Destination Access Point). ETCH. Algoritmo de salto de canal eficiente para el Rendezvous en redes DSA (Efficient Channel Hopping for Communication Rendezvous in Dynamic Spectrum Access Networks). FCC. Institución. reguladora. americana. de. las. comunicaciones. (Federal. Communication Commission) ISM. Banda espectral dedicada a la industria médica y científica. L-QCH. Algoritmo de saltos de canal basado en sistemas de quórum mínimo (Load Quorum Channel Hopping). MAC. Control de acceso al medio (Medium Access Control). M-QCH. Algoritmo de saltos de canal basado en sistemas de quórums mayoritarios (Majority Quorum Channel Hopping). PRC. Potencial pareja de Rendezvous (Potencial Rendezvous Couple). QCH. Algoritmo de saltos de canal (Quorum Channel Hopping).
(10) vii RCCH. Algoritmo de saltos de canal para redes radio cognitivas (Channel-Hopping Schemes for Cognitive Radio Networks). RCSEQ. Algoritmo de secuencia de canales de encuentro (Channel Rendezvous Sequence). SDR. Radio definida por software ( Software Defined Radio). SYNC-. Algoritmo de salto de canal eficiente sincrónico para el Rendezvous en redes. ETCH. DSA (Synchronous ETCH). SMO. Algoritmo de movilidad espectral (Spectrum Mobility). SSCH. Algoritmo de secuencias de salto de canal basado en ranuras semillas (Slotted Seeded Channel Hopping). TDMA. Acceso múltiple por división en el tiempo ( Multiple Access Time Division). TTR. Tiempo para lograr el Rendezvous. xG. Redes de próxima generación (neXt Generation). LISTA DE VARIABLES 𝑎. Canal inicial de la secuencia alternativa del transmisor en el algoritmo RCCH. 𝑐. Índice más pequeño de las secuencias suscritas a V en el algoritmo ETCH. 𝑑. Arreglo que guarda los pares de secuencias emparejados en la fase I de SYNCETCH. 𝑒. Índice de la secuencia que se empareja con 𝑠𝑐 en la Fase I de SYNC-ETCH. ℎ. Canal que se elige aleatoriamente del conjunto de los N canales de la red en QCH. ℎ𝑑. Canal que ocupa la posición d del conjunto de los N canales de la red en QCH. 𝑛. Longitud de cada fragmento de secuencia de CH en QCH.
(11) viii 𝑁 𝑝𝑎𝑟. Conjunto de canales de la red radio cognitiva Conjunto de canales pares del conjunto de los N canales en RCCH. 𝑠. Secuencia de CH de la red radio cognitiva. 𝑆. Sistema de quórum cíclico en QCH. |𝑆|. Cantidad de quórums que conforman el sistema de quórum cíclico en QCH. 𝑆𝑠. Conjunto de secuencias de saltos de canal de la red radio cognitiva. 𝑠𝑑. Semilla, tamaño del salto de canal entre ranuras de tiempo continuas en RCCH. 𝑠𝑖𝑛𝑡. Secuencia obtenida en un paso intermedio durante la construcción de las secuencias alternativa y por defecto en RCCH. 𝑠𝑟𝑜𝑜𝑡 Secuencia obtenida al rotar 𝑠𝑖𝑛𝑡 en un paso intermedio durante la construcción de las secuencias alternativa y por defecto en RCCH 𝑇. Período de duración cada secuencia de CH. 𝑘. Cantidad de elementos de cada quórum del sistema de quórum cíclico en QCH. 𝑉. Conjunto de secuencias que pertenecen a 𝑆𝑠, tal que 𝑉 ≠ 𝑆𝑠(2𝑁−1).
(12) ix TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v GLOSARIO DE TÉRMINOS ...............................................................................................vi GLOSARIO DE VARIABLES ........................................................................................... vii INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. GENERALIDADES DE LA RADIO COGNITIVA ................................ 4. 1.1. Generalidades de la Radio Cognitiva................................................................ 4. 1.2. Aplicaciones de las redes de radio cognitiva .................................................... 5. 1.3. Arquitectura de las redes de Radio Cognitiva .................................................. 6. 1.4. Tareas cognitivas .............................................................................................. 8. 1.5. Clasificación de los Algoritmos de Rendezvous de redes de radio cognitiva . 10. 1.5.1. Sistemas Centralizados ................................................................................... 11. 1.5.2. Sistemas Descentralizados utilizando CCC .................................................... 12. 1.5.3. Sistemas Descentralizados sin utilizar CCC ................................................... 12. 1.6. Consideraciones Finales ................................................................................. 15. CAPÍTULO 2.. CARACTERIZACIÓN. DE. ALGORITMOS. DE. RENDEZVOUS. SINCRÓNICOS 16 2.1. Modelo de la red radio cognitiva ............................................................................... 16. 2.2 Descripción del algoritmo QCH ..................................................................................... 17.
(13) x 2.2.1 Sistema de quórums ..................................................................................................... 18 2.2.2 Descripción de M-QCH y L-QCH ............................................................................... 19 2.3 Descripción del algoritmo RCCH ................................................................................... 22 2.4 Descripción del algoritmo ETCH ................................................................................... 25 2.4.1 Descripción del algoritmo SYNC-ETCH en dos fases ................................................ 25 2.5 Métricas para evaluar el desempeño de los algoritmos de Rendezvous .......................... 29 2.6 Consideraciones Finales.................................................................................................. 30 CAPÍTULO 3.. EVALUACIÓN Y COMPARACIÓN DE LOS ALGORITMOS. PRESENTADOS 32 3.1 Entorno de simulación .................................................................................................... 32 3.2 Resultados alcanzados..................................................................................................... 33 3.2.1 Resultados en términos de MTTR ............................................................................... 33 3.2.2. Resultados en términos de ETTR ................................................................... 36. 3.3. Consideraciones finales .................................................................................. 39. CONCLUSIONES ................................................................................................................ 41 RECOMENDACIONES ....................................................................................................... 42 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 44 ANEXOS .............................................................................................................................. 47 ANEXO 1. Funciones implementadas en Matlab para construir los algoritmos M-QCH, LQCH, RCCH y ETCH. .......................................................................................................... 47 ANEXO 2. Error cometido en la estimación del MTTR y el ETTR .................................... 57.
(14) INTRODUCCIÓN. 1. INTRODUCCIÓN. El modelo regulatorio de asignación del espectro es fijo y el constante crecimiento durante los últimos años de nuevas técnicas de radio y servicios ha dado lugar al agotamiento de las bandas de frecuencia de interés práctico para las comunicaciones inalámbricas. La institución reguladora americana de las comunicaciones (FCC, por sus siglas en inglés) en el 2003, demostró que dicha asignación del espectro no es homogénea ni tampoco eficiente. Debido a este hecho, se han desarrollado los métodos de asignación del espectro dinámicos. En este contexto, surge la Radio Cognitiva (RC) para fomentar mejoras en el uso del espectro de frecuencias, por la diversidad de aplicaciones en las que pueden ser desplegadas así como la posibilidad de establecer comunicaciones altamente fiables. Las investigaciones en la RC se han centrado en el potencial que ofrecen las redes de este tipo para lograr el Acceso Dinámico al Espectro (DSA por sus siglas en inglés), gracias a la capacidad de identificar lagunas temporales y espaciales del espectro no ocupadas por los usuarios autorizados y colocar las transmisiones de los usuarios cognitivos en esos espacios. Dichas redes se emplean para apoyar la creciente demanda de nuevas aplicaciones, por ejemplo, bandas inalámbricas de televisión para redes inteligentes, la seguridad pública, la telefonía celular de banda ancha y la banda mBan para aplicaciones médicas (Jianfeng Wang and Challapali, 2011). En las redes RC, uno de los objetivos fundamentales es lograr el encuentro entre los usuarios secundarios o cognitivos para establecer la comunicación entre ellos en el menor tiempo posible, este proceso se conoce como Rendezvous. La utilización del sincronismo en algoritmos de Rendezvous de redes radio cognitivas se ha hecho presente con el objetivo de realizar una detección del espectro de manera eficiente y explotar las capacidades de la Radio Cognitiva. Siguiendo esta línea de trabajo, con el objetivo de lograr que el tiempo para Rendezvous sea lo más corto posible, han sido propuestos algoritmos de Rendezvous sincrónicos en redes cognitivas. A pesar de ello, existe escasa bibliografía donde se comparen dichos algoritmos en términos del tiempo para lograr el Rendezvous (TTR)..
(15) INTRODUCCIÓN. 2. El objetivo general de este trabajo es comparar el desempeño de algoritmos de Rendezvous sincrónicos de redes radio cognitivas. Para dar cumplimiento al objetivo general fueron trazados los siguientes objetivos específicos: . Caracterizar las redes de radio cognitiva.. . Mostrar las ventajas del sincronismo en las redes de radio cognitiva,. fundamentalmente, para lograr el Rendezvous entre los usuarios cognitivos. . Describir algoritmos de Rendezvous sincrónicos utilizados en las redes de radio. cognitiva expuestos recientemente. . Establecer las métricas que deben ser evaluadas para comparar los algoritmos de. Rendezvous sincrónicos seleccionados. . Confeccionar utilizando el asistente matemático Matlab los simuladores de eventos. discretos necesarios para analizar el comportamiento de los algoritmos de Rendezvous sincrónicos seleccionados. . Evaluar comparativamente los algoritmos de Rendezvous sincrónicos seleccionados. para identificar sus ventajas y limitaciones. La memoria escrita está estructurada en introducción, tres capítulos, conclusiones, recomendaciones, bibliografía, glosario de términos y anexos. En el primer capítulo se recogen las principales características de las redes radio cognitivas, sus tareas fundamentales, la arquitectura de las redes radio cognitivas, algunas de sus más relevantes aplicaciones; se expone además una clasificación de los algoritmos de Rendezvous para este tipo de redes destacando las ventajas que brindan los algoritmos sincrónicos. En el segundo capítulo se describe el modelo de la red radio cognitiva a emplear, se realiza una definición de los sistemas de quórum y se describen los algoritmos RCCH (Channel-Hopping Schemes for Cognitive Radio Networks), L-QCH (Load Quorum Channel Hopping), MQCH (Majority Quorum Channel Hopping) y ETCH (Efficient Channel Hopping for Communication Rendezvous in Dynamic Spectrum Access Networks). En el tercer capítulo se muestran los resultados de las simulaciones realizadas y la discusión de los mismos. En las conclusiones se destaca el cumplimiento de los objetivos previstos en esta investigación. Las recomendaciones están encaminadas a enriquecer futuras investigaciones sobre el tema..
(16) INTRODUCCIÓN. 3. Los anexos recogen el material de apoyo necesario para ayudar a la comprensión de este trabajo..
(17) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. CAPÍTULO 1.. 4. GENERALIDADES DE LA RADIO COGNITIVA. En el presente capítulo es definido en el epígrafe 1.1 el concepto de la Radio Cognitiva, además, se exponen algunas de las aplicaciones que dicha tecnología posee en el epígrafe 1.2. Los tipos de arquitectura de redes radio cognitivas así como las tareas cognitivas que dichas redes realizan son descritos en las secciones 1.3 y 1.4 respectivamente. La sección 1.5 es dedicada a realizar una clasificación de los algoritmos de Rendezvous de redes radio cognitivas, y por último, la sección 1.6 se presentan las conclusiones de este capítulo. 1.1. Generalidades de la Radio Cognitiva. El concepto de Radio Cognitiva surge como una prometedora solución a la flexible y eficiente utilización del espectro. La idea de la RC fue propuesta por primera vez por Joseph Mitola III y Gerald P. Maguire (A.K, 2009), en 1999 describiéndola como un sistema de Radio Definido por Software (SDR, por sus siglas en inglés) que puede cambiar sus parámetros dependiendo del entorno y requerimientos del usuario. Como se observa en la Figura 1.1, el objetivo de las redes de Radio Cognitiva es aumentar el aprovechamiento del espectro, reutilizando las bandas espectrales que estén desocupadas por los usuarios primarios sin causarles interferencia a los mismos (huecos espectrales), entendiéndose por usuarios primarios (UP) como los usuarios a los que se le han asignado determinadas bandas del espectro para su explotación (Xiong, 2011) y por usuarios secundarios o cognitivos (US) a aquellos que de forma oportunista las utilizan..
(18) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 5. Figura1.1 Acceso dinámico al espectro (tomada de (L. F. Pedraza and Páez, 2012)). 1.2. Aplicaciones de las redes de radio cognitiva. El éxito de las tecnologías inalámbricas, no sólo continuará sino que se incrementará aún más en el futuro, ampliándose las aplicaciones y servicios que las hacen atractivas. Las aplicaciones de la emergente tecnología Radio Cognitiva vislumbran una amplia penetración en múltiples esferas. Las redes de radio cognitiva poseen diversas aplicaciones (J.Wang and Challapali, 2011) entre ellas se pueden citar: Uso militar: La mayoría de los sistemas de comunicación de los ejércitos deben desplegarse en entornos desconocidos y hostiles rápidamente, enfrentando problemas de interferencias, conectividad y variaciones impredecibles de dichos entornos. La RC puede ser una solución para estos ambientes, pues facilita la configuración autónoma de los equipos y garantiza la coexistencia, al utilizar frecuencias desocupadas (Rentería and Cadavid, Mar.2011). En (I. F Akyildiz and Mohanty, May.2006) se muestra que las redes de radio cognitiva pueden habilitar la radio militar para elegir diferentes parámetros como el ancho de banda de frecuencia intermedia y los esquemas de modulación y codificación, adaptándose así al ambiente inconstante de radio del campo de batalla. Además, las redes militares tienen la.
(19) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 6. necesidad de asegurar y proteger sus comunicaciones del adversario. Las redes de RC pueden permitir al personal militar realizar el re-encaminamiento dentro del espectro para encontrar la banda espectral más segura para su propia comunicación. Seguridad pública: Cuestiones como el despliegue rápido, la disponibilidad inmediata, el uso eficiente del espectro disponible y la interoperabilidad entre sistemas (bomberos, paramédicos, policía) son ventajas de la RC aplicables en esta área. Emergencias: Dadas las características de reconfiguración dinámica de los parámetros de operación de la RC, puede dar soporte a determinadas capacidades técnicas que son cruciales al momento de presentarse una emergencia. La Radio Cognitiva permitirá que las frecuencias no utilizadas se ocupen en la atención de emergencias, para facilitar la comunicación con los servicios de salud y ayuda implicados en la toma de decisiones para la salvaguarda de vidas. 1.3. Arquitectura de las redes de radio cognitiva. La arquitectura de una red radio cognitiva comprende la red de usuarios primarios (usuarios autorizados a operar en una determinada banda del espectro), y la red de usuarios cognitivos o red de próxima generación (xG, por sus siglas en inglés). Como se observa en la Figura 1.2 en la red primaria se encuentran los usuarios que tienen permiso o licencia para operar en una determinada banda del espectro, a estas bandas se le denominan bandas de licencia; si la banda no tiene permisos otorgados a usuarios primarios se le denomina banda sin licencia. Si la red primaria se basa en infraestructura, la comunicación entre los usuarios primarios pasa a través de la estación base primaria, este tipo de arquitectura está presente en la Figura 1.2 para la banda de licencia I. En sentido contrario, si la red no presenta estaciones bases, entonces tiene una arquitectura sin infraestructura como la existente para la banda de licencia II en la Figura 1.2..
(20) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 7. Figura1.2 Arquitectura de las redes de radio cognitiva (adaptada de (I. F Akyildiz and Mohanty, May.2006)). La red cognitiva, también llamada red secundaria, no cuenta con una licencia para operar en una banda deseada por lo tanto requiere de una funcionalidad adicional de los US para compartir las bandas con y sin licencia. La red cognitiva que utiliza una banda sin licencia, facilita que todas sus entidades tengan el mismo derecho de acceder a la banda del espectro. En este caso las múltiples redes de radio cognitiva que coexisten en la misma área se comunican empleando la misma banda del espectro. Por otra parte, si la red cognitiva utiliza las bandas de licencia, esta coexiste con la red primaria. La arquitectura de las redes cognitivas como se muestra en la Figura 1.2, independientemente de si utilizan bandas de licencia o no, puede ser de dos tipos: con infraestructura o sin infraestructura. Aquella red radio cognitiva que cuente con estaciones bases para establecer la comunicación entre los US y con otras redes cognitivas, tiene una arquitectura basada en infraestructura. Las redes radio cognitivas sin infraestructura o redes ad-hoc (CRAHN, por sus siglas en inglés) no presentan estaciones bases, en las mismas los.
(21) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 8. usuarios cognitivos se comunican entre ellos a través de una conexión ad hoc sobre las bandas del espectro. En este último tipo de arquitectura, se destacan tres escenarios de trabajo. Primero, si los usuarios cognitivos tienen disponibles todos los canales de la banda espectral utilizada entonces está presente un escenario ideal. Como segundo y tercer casos está el escenario simétrico y el asimétrico, el primero es aquel donde el conjunto de canales que los usuarios perciben como disponibles es el mismo para todos y en el segundo caso, los usuarios no captan el estado de ocupancia (libre u ocupado) de los canales de igual forma. Una subclase de las redes cognitivas sin infraestructura o descentralizas, son las redes de intercambio, donde coexisten dos redes inalámbricas en una banda sin licencia. Un ejemplo de esta red es la coexistencia de IEEE 802.11 y 802.16. En estas redes, se establece un canal de coordinación del espectro para el control del intercambio de información sobre los parámetros de transmisión y recepción. La identificación del usuario principal y las funciones de gestión no son necesarios en estas clases de redes (Manjarrez and Amellali, 2010). Dentro de los principales desafíos que afrontan las redes radio cognitivas sin infraestructura se encuentra la identificación de los canales de control común que deben establecerse para lograr la comunicación, de ahí que ello constituya una de sus principales metas (M. D Felice and L.Bononi, 2010). 1.4. Tareas cognitivas. Las redes de RC en sentido general deben poseer una estructura de gestión del espectro para poder conocer las condiciones del mismo en el área en que se hallan, esta estructura como se observa en la Figura 1.3 debe realizar un ciclo cognitivo de tres etapas: detectar el espectro radioeléctrico, compartir el espectro y dirigir el canal de control (L. Gavrilovska and Angjelichinoski, 2014)..
(22) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 9. ¿Dónde se establece? ¿Cómo se establece? ¿Cómo se dirige?. Dirigir el canal de control. Compartir el. Detectar el. espectro. espectro. ¿Dónde se detecta?. ¿Cómo se accede?. ¿Qué se detecta?. ¿Cómo asignar recursos?. ¿Cómo se detecta?. Figura1.3.. Estructura. del. ciclo. cognitivo. los. (adaptada de (L.. Gavrilovska and. Angjelichinoski, 2014). La detección del espectro radioeléctrico es una funcionalidad de la capa física de la red que se acopla con la capa de control de acceso al medio (MAC, por sus siglas en inglés) y constituye una herramienta básica para adquirir la información del espectro radioeléctrico teniendo en cuenta la ocupación, la disponibilidad y uso del mismo. Varios protocolos MAC cognitivos han propuesto la implementación de bases de datos como mecanismo para guardar la información acerca del espectro. La tarea de compartir el espectro entre los usuarios cognitivos se basa en la información del ambiente radioeléctrico obtenida mediante la exploración directa del espectro o de las bases de datos que contienen la información del estado del mismo y su objetivo es dirigir y asignar los recursos entre los nodos cognitivos asegurando la transparencia y la protección de la comunicación entre los UP..
(23) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 10. La dirección del canal de control es una inevitable tarea del ciclo cognitivo y proporciona el mecanismo para la coordinación, cooperación y colaboración de las entidades cognitivas con los procesos de detección y compartir el espectro (Zaw Htike and Lee, June 2013). Su objetivo fundamental es la asignación, el establecimiento y supervisión de un canal seguro, disponible y fiable para diseminar la información en el medio ambiente espectral heterogéneo. Este proceso en el que dos o más US pueden establecer la comunicación en un canal común se conoce como Rendezvous y constituye una de las metas más desafiantes del ciclo cognitivo (I.F Akyildiz and Chowdhury, 2009) . 1.5. Clasificación de los Algoritmos de Rendezvous de redes de radio cognitiva. Para caracterizar los algoritmos de Rendezvous se tiene en cuenta elementos claves como: si es necesaria la ayuda de controladores centralizados, si se asume canal de control común o no, si presentan sincronización de tiempo o no, si es factible en un modelo asimétrico. Se presenta en la Figura 1.4 un desglose de la clasificación de los algoritmos de Rendezvous, aquellos que emplean un canal dedicado al control utilizan el mecanismo conocido como canal de control común (CCC), a la inversa, aquellos que lo logren sin un CCC, siguiendo una secuencia de saltos de canales utilizan la técnica de saltos del canal (CH, por sus siglas en inglés) (H. Liu and Leung, 2012)..
(24) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 11. Figura1.4. Clasificación de los algoritmos de Rendezvous (adaptada de (H. Liu and Leung, 2012)). 1.5.1 Sistemas Centralizados Un sistema centralizado presenta una estación base o un servidor que controla y distribuye los canales de Rendezvous para todos los nodos de la red. En estos sistemas los nodos logran Rendezvous con y sin la utilización de un control centralizado. La mayoría de los sistemas centralizados, tales como DIMSUMNet (M. Buddhikot and Evans, Jun 2005) y DSAP (V. Brik and BahlD, Nov.2005), requieren un servidor para utilizar un CCC preseleccionado, que es bien conocido y accesible por todos los usuarios en el red. Técnicamente, el CCC que se desea se puede asignar en bandas sin licencia (por ejemplo, la banda ISM) o en las bandas de licencia específicas para la aplicación (M. Buddhikot and Evans, Jun 2005, V. Brik and BahlD, Nov.2005). Dados los inconvenientes que produce la utilización de un CCC como la falta de disponibilidad de un canal común para el control, problemas de saturación del canal de control y presencia de vulnerabilidades en la seguridad (Zaw Htike and Lee, June 2013), los.
(25) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 12. autores en (Y. Kondareddy and Sivalingam, 2008) investigaron los sistemas centralizados sin utilizar CCC y propusieron un mecanismo cuya idea básica es la siguiente: el servidor y otros US buscan los canales a frecuencias más altas. Cuando un US encuentra un canal disponible después de la detección, espera en este canal para reunirse con el servidor y si lo logra, la comunicación se establece. Aunque los sistemas centralizados son relativamente simples. de implementar. independientemente de si utilizan CCC o no, son débiles en escalabilidad y robustez. En estos sistemas, el servidor se puede convertir fácilmente en un cuello de botella (un fracaso en el servidor va a afectar a todo el sistema) y resultará fácil de atacar por los intrusos. 1.5.2 Sistemas Descentralizados utilizando CCC Los sistemas descentralizados se pueden clasificar en dos categorías en función del uso de CCC o no. En (J. Jia and Shen, 2008) y (L. Ma and C, 2005) presentan un sistema descentralizado asumiendo un CCC global que se obtiene por adelantado y es accesible por todos los usuarios. En estos sistemas, los dos usuarios pueden sintonizar este canal cuando quieren intercambiar la información de control mutuamente. No es aconsejable utilizar un CCC global en las bandas del espectro explotas en exceso; puesto que es muy difícil de obtener un canal compartido de este tipo. La búsqueda local en lugar de un CCC global será más factible en la red radio cognitiva; esta opción es utilizada en (So and Vaidya, 2004). En estos sistemas, los usuarios son agrupados de acuerdo a sus conjuntos de canales disponibles, los usuarios en el mismo grupo de miembros pueden acceder a un canal de control común dentro del conjunto de los disponibles. En los sistemas descentralizados utilizando CCC debido a su naturaleza descentralizada, es muy difícil obtener un CCC global y es considerable la sobrecarga para poder establecer y mantener un CCC local. 1.5.3 Sistemas Descentralizados sin utilizar CCC Dado que el uso del CCC tiene sus propias limitaciones, atraen más la atención de los investigadores los sistemas descentralizados sin utilizar CCC o como se le conoce también, Rendezvous a ciegas. Un típico enfoque de Rendezvous a ciegas es la técnica de CH, en la.
(26) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 13. misma (Song and Xie, 2012). Cuando un US necesita comunicarse con su vecino, se cambia de un canal a otro, siguiendo una secuencia de salto predefinida, hasta que se encuentran (C. F. Shih and Liao, 2010, J. Shin and Kim, 2010). Dentro de los algoritmos de Rendezvous de CH se destacan tres vertientes: algoritmos aleatorios, algoritmos que utilizan sincronización de tiempo y algoritmos sin sincronización de tiempo. En los algoritmos aleatorios, cada usuario decide su propia secuencia de salto en base a sus canales disponibles en una forma puramente aleatoria. Un algoritmo aleatorio, llamado AMRCC (Adaptative Multiple Rendezvous Control Channel), fue propuesto en (Cormio and Chowdhury, 2010). La idea básica de AMRCC es que los canales con menor interferencia debido a un UP tienen oportunidades más grandes para ser seleccionados en la secuencia de CH. Sin embargo, estos algoritmos incluyendo AMRCC no pueden garantizar el encuentro de los usuarios en tiempo finito. En (S. Krishnamurthy and Venkatesan, 2008) se proponen algoritmos de CH que proporcionan Rendezvous sin necesitar sincronización de tiempo en las redes, así como en (N. C. Theis and DaSilva, 2011), donde se propone un algoritmo que genera secuencias ortogonales, SMO (Spectrum Mobility). ASYNC-ETCH es otro ejemplo de algoritmo asincrónico, fue propuesto en (Song and Xie, 2012) y el objetivo del mismo no sólo es disminuir el tiempo para lograr el Rendezvous (TTR, por sus siglas en inglés) sino también equilibrar la carga y la relación de utilización de los canales. En (K.Bian and Par, 2011) se propone un algoritmo denominado ACH (Asynchronous Channel Hopping), en este algoritmo se suponen dos roles, el emisor y el receptor, que participan en el proceso de encuentro. Recientemente, algoritmos de encuentro asincrónicos fueron propuestos en (N. C. Theis and DaSilva, 2011, J. Shin and Kim, 2010, Z.Y. Lin and Leung, 2011) para el encuentro de los usuarios tanto en virtud del modelo asimétrico como simétrico; DRSEQ (Deterministic Rendezvous Sequence) (D. Pu and McLernon., 2009), RCSEQ (Channel Rendezvous Sequence) (L. Ma and C, 2005) y Jump-Stay (Z.Y. Lin and Leung, 2011). En DRSEQ los usuarios generan idénticas secuencias de salto y su implementación se limita a escenarios simétricos. Por su parte, RCSEQ a pesar de que es aplicable a modelos simétricos y asimétricos su rendimiento en el simétrico en términos del máximo TTR.
(27) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 14. (MTTR) no es satisfactorio. El algoritmo Jump-Stay genera las secuencias de CH en rondas y cada ronda se compone de un patrón de salto y un patrón de espera. Son varios los autores que proponen la sincronización de tiempo en un sistema de CH debido a que el sincronismo en redes de RC evita que las diferencias de tiempo causen que los nodos detecten el espectro en diferentes momentos además, esto puede conducir a resultados de detección incorrecta. Por otra parte, la sincronización de tiempo permite el uso del Acceso Múltiple por División en el Tiempo (TDMA, por sus siglas en inglés), técnicas que son generalmente consideradas más eficientes que las técnicas de control de acceso al medio (MAC, por sus siglas en inglés). Además, en disímiles aplicaciones de las redes de RC, los usuarios secundarios están obligados a mantener la sincronización de tiempo exacto, por ejemplo, como solución al problema del terminal oculto (Kondareddy and Agrawal, May 2008). Debido a la naturaleza descentralizada de tiempo global en redes de Radio Cognitiva la sincronización ha sido reconocida como una tarea particularmente desafiante mas no deja de ser un atractivo debido al hecho de que el sincronismo potencializa las posibilidades de las redes radio cognitivas y por tanto la utilización del mismo en estas redes es factible. Por su parte, los algoritmos de Rendezvous sincrónicos de RC muestran resultados alentadores con respecto a aquellos que no utilizan sincronización global ya que los valores de TTR son relativamente pequeños. Baúl et al. hizo un trabajo pionero en (P. Bahl and Dunagan, Sep 2004) y propuso un protocolo de nivel de enlace, llamado SSCH. En SSCH cada usuario selecciona múltiples pares de canales y ranuras, la secuencia de CH es determinada sobre la base de estos pares. Aunque SSCH fue diseñado para aumentar la capacidad de las redes IEEE 802.11, garantiza el Rendezvous de los usuarios bajo el modelo simétrico. Autores en (S. Krishnamurthy and Venkatesan, 2008) propusieron un enfoque determinista en el que cada usuario, transmitirá en todos los canales de manera exhaustiva. Sobre la base de los sistemas de quórum, en (K. Bian and Chen, Sept.2009) se propuso el algoritmo QCH (Quorum Channel Hopping), específicamente diseñado para redes DSA. El mismo utiliza la propiedad de solapamiento de los quórum para forma secuencias de CH y lograr que estas alcancen el Rendezvous periódicamente. En la sección 2.2.1 es explicado.
(28) CAPÍTULO 1. GENERALIDADES DE LA RADIO COGNITIVA. 15. en detalle el concepto de sistema de quórum. Los autores propusieron en el mismo artículo dos variantes sincrónicas, M-QCH y L-QCH, ambas garantizan Rendezvous en un modelo simétrico y asimétrico de la red cognitiva. En (G. Y Chan and Sheu, 2012) se propuso el algoritmo RCCH. Este algoritmo se basa en roles, en una pareja de nodos que intentan lograr el Rendezvous, uno es el transmisor y el otro el receptor. En (Y. Zhang and Wang, 2011, Y. Zhang and Wang, 2013, Y. Zhang and Wang, Jun. 2012) se propone el algoritmo ETCH el cual utiliza la diversidad de frecuencia en el establecimiento de un canal de control en nodos de redes DSA. En dichos artículos se plantea una variante sincrónica de ETCH, SYNC-ETCH, esta variante asume que existen mecanismos para sincronizar los nodos de la red de modo que periódicamente empiecen una nueva ejecución de sus secuencias de CH en el mismo momento global. 1.6. Consideraciones Finales. La escasez de recursos espectrales debido a la constante proliferación de nuevas tecnologías ha conllevado a la necesidad de buscar métodos de asignación del espectro que sean dinámicos. La Radio Cognitiva surge para fomentar mejoras en el uso eficiente del espectro de frecuencias y como un modelo para la comunicación entre usuarios no autorizados explotando las bandas espectrales cuando estas no están siendo utilizadas por los UP. Tiene como objetivo el logro de tres tareas fundamentales que conforman el ciclo cognitivo: detectar el espectro radioeléctrico, compartir el espectro y dirigir el canal de control. En el logro de estas tareas emerge el desafío que tienen los algoritmos de redes radio cognitivas de lograr el Rendezvous para el establecimiento de la comunicación entre usuarios cognitivos. En los algoritmos de Rendezvous se puede discernir una clasificación de los mismos atendiendo a si es necesaria la ayuda de controladores centralizados, si asume canal de control común o no, si presentan sincronización de tiempo y si son aplicables a los modelos simétrico y asimétrico. Los algoritmos de encuentro sincrónicos en redes de RC son ampliamente propuestos y en la literatura. Brindan la posibilidad de tener un tiempo de encuentro entre los nodos de la red cognitiva finito y relativamente corto..
(29) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. CAPÍTULO 2.. 16. CARACTERIZACIÓN DE ALGORITMOS DE. RENDEZVOUS SINCRÓNICOS En este capítulo es descrito en el epígrafe 2.1, el modelo de la red radio cognitiva en cuestión. La sección 2.2.1 se dedica al análisis de las propiedades de los sistemas de quórum y los epígrafes 2.2, 2.2.2, 2.3, 2.4 y 2.5 a la descripción de los algoritmos QCH, LQCH, M-QCH, RCCH y SYNC-ETCH respectivamente, los cuales han sido propuestos recientemente. En la sección 2.6 se presentan las conclusiones de este capítulo. 2.1. Modelo de la red radio cognitiva. Se considera la existencia de una red radio cognitiva con N canales, donde 𝑠 es la secuencia de saltos que sigue cada nodo cognitivo; se asume además que el tiempo está dividido en múltiples ranuras que tienen igual duración y el conjunto de todas estas ranuras forman el período de las secuencias denominado T. Dichas secuencias de CH determinan el orden en que los nodos visitan todos los canales. Se asume que en la red existen mecanismos para sincronizar los nodos cognitivos y pueden comenzar las ejecuciones periódicamente de sus secuencias de CH al unísono. En dicha red, dos nodos cognitivos logran el Rendezvous si se encuentran en una misma ranura de tiempo (ranura de Rendezvous) y en un mismo canal (canal de Rendezvous). Para modelar la actividad de los usuarios primarios se utiliza un modelo de la ocupación del canal de Gilber-Elliot (M. Bkassiny and Avery, 2011). Este modelo es especialmente útil en entornos ranurados con presencia de usuarios primarios como el descrito en este trabajo, el mismo plantea que la actividad de los UP en cada uno de los canales sigue un proceso de Markov de tiempo discreto de dos estados (O. Mehanna and Gamal, Jun.2009). En la Figura 2.1 se aprecia el diagrama de estado del modelo del canal de Gilber-Elliot, en el mismo, el estado del canal 𝑖 en la ranura de tiempo 𝑗 denotado por 𝑆𝑖 se asume 1 si el canal está libre de UP y 0, si el canal está ocupado por UP. La probabilidad de transición de que permanezca en el mismo estado durante un cierto período de tiempo es denotada por 𝑃𝑖𝑗 𝑖 (L. Gavrilovska and Angjelichinoski, 2014)..
(30) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 17. Figura 2.1. Diagrama de estado del modelo del canal de Gilber-Elliot (adaptada de (L. Gavrilovska and Angjelichinoski, 2014)). Por otra parte, se tienen en cuenta tres escenarios de análisis para el modelado de la red. Primero un escenario ideal donde el número de canales de Rendezvous es igual a N. Como segundo y tercer casos, se emplea un escenario simétrico y otro asimétrico donde se utiliza la variable 𝑟ℎ𝑜 (𝜌) para expresar el grado de utilización de cada canal en porciento. El grado de utilización de un canal se define como la relación que existe entre la cantidad de ranuras de tiempo que un canal está ocupado con respecto al total de ranuras. 2.2 Descripción del algoritmo QCH El algoritmo QCH (Quorum Channel Hopping), genera un sistema de secuencias de CH a partir de un sistema de quórums que permiten Rendezvous en múltiples canales entre cualquier par de secuencias de dicho sistema, con la utilización o no del sincronismo de tiempo entre los nodos cognitivos. Bajo el supuesto de sincronización global de tiempo en la red RC existen dos vertientes de dicho algoritmo, cada una de ellas con resultados diferentes. La primera variante minimiza el MTTR, denominada M-QCH (Majority-QCH). La segunda variante distribuye convenientemente los puntos de encuentro en diferentes intervalos de tiempo durante un período de CH para aliviar la carga del canal de comunicación durante el Rendezvous, llamada L-QCH (Load-QCH). En las secciones.
(31) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 18. siguientes son presentadas las particularidades de cada una de ellas así como la definición de sistema de quórums (K. Bian and Chen, Sept.2009). 2.2.1 Sistema de quórums Un sistema de quórums se construye utilizando la diferencia entre sets o conjuntos cíclicos aplicando una teoría combinacional (Tzamaloukas and Aceves, 2000). En (K. Bian and Chen, 2009), se plantea que un sistema de quórums 𝑆 es un grupo de subconjuntos formado a partir de un conjunto primario denominado set universal 𝑈 de 𝑛 elementos, 𝑈𝑛 = {0,1, … . 𝑛 − 1} donde, la intersección entre un par de subconjuntos tomados dos a dos es diferente de cero. En (K. Bian and Chen, 2009) el conjunto de quórums se obtiene como sigue: 𝐵(𝑖) = {(𝑎1 + 𝑖) + (𝑎2 + 𝑖) + … . +(𝑎𝑘 + 𝑖)}𝑚𝑜𝑑 𝑛 donde 𝐵(𝑖) es el quórum a formar, 𝑖 ∈ {0,1, … . , (𝑛 − 1)}, 𝐷 = {𝑎1, 𝑎2 … 𝑎𝑘} es el quórum primario a partir del cual se forman los restantes quórums y 𝑘 es la cantidad de elementos de cada quórum. Por ejemplo si se toma como set universal a 𝑈7 , 𝑘 = 3 y se elige como quórum primario 𝐷 = 1 2 4, entonces aplicando la definición dada se obtiene el sistema de quórum siguiente: {1 2 4; 2 3 5; 3 4 6; 4 5 7; 5 6 1; 6 7 2; 7 1 3}. La cantidad de quórums es igual al número de elementos del set universal. Un sistema de quórum es cíclico si cumple que 𝐷 es un ciclo relajado (𝑛, 𝑘). Un ciclo relajado es aquel donde para cada 𝑢 ≠ 0 tal que 𝑢 ∈ 𝑈𝑛 , existe al menos un par de elementos (𝑑𝑖 ′ 𝑑𝑗 ) ∈ 𝐷 tomados al azar tal que (𝑑𝑖 −𝑑𝑗 ) ≡ 𝑢 𝑚𝑜𝑑 𝑛 . Por ejemplo, el quórum primario 𝐷 = {1 2 4} para (7,3) es un ciclo relajado ya que la diferencia de al menos un par de elementos de D es congruente con un elemento de 𝑢 = {1, 2, 3 … . .6} como se muestra a continuación (Luk and Wong, 1997): (2 − 1)𝑚𝑜𝑑7 ≡ 1 (4 − 2)𝑚𝑜𝑑7 ≡ 2 (4 − 1)𝑚𝑜𝑑7 ≡ 3 (1 − 4)𝑚𝑜𝑑7 ≡ 4 (2 − 4)𝑚𝑜𝑑7 ≡ 5.
(32) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 19. (1 − 2)𝑚𝑜𝑑7 ≡ 6 En (J. R. Jiang and Lai, 2005) se demuestra que el tamaño de un quórum en un sistema de quórum cíclico es 𝑘 ≥ √𝑛. Para lograr que un quórum se acerque al tamaño mínimo óptimo posible se propone en (Luk and Wong, 1997) que se utilice un set universal cuyo tamaño sea aproximadamente igual a 𝑘 2 + 𝑘 + 1 y 𝑘 − 1 un número primo, a este set se le conoce como Singer Difference. Los sistemas de quórums cíclicos que se forman a partir de dicho set se conocen como sistemas de quórum mínimo. En (Luk and Wong, 1997) se obtienen los quórum óptimos para 𝑛 ≤ 111 siguiendo un método exhaustivo partiendo la definición de Singer Difference. Si no existe un valor de 𝑘 para el valor de 𝑛 del set universal dado que cumpla exactamente con la definición, se aumenta en uno el valor de 𝑘 hasta encontrar la solución óptima. Un pequeño fragmento de los valores dados en (Luk and Wong, 1997) se muestra en la Tabla 2.1 donde, D es el quórum primario a partir del cual se forman los restantes quórums para un valor dado de 𝑛. Tabla 2.1. Quórums cíclicos óptimos (adaptada de (Luk and Wong, 1997)). 𝒏. 𝟕. 𝟖. 𝟗. 𝟏𝟎. 𝟏𝟏. 𝟏𝟐. 𝟏𝟑. 𝑫. 013. 0124. 0124. 0125. 0125. 0137. 0139. En otro orden, los quórums cuya cantidad de elementos es más de la mitad de los elementos del set universal (𝑘 > 𝑛/2), se denomina en (K. Bian and Chen, 2011) como sistema de quórum cíclico mayoritario y se construye a partir de la definición de sistema de quórum cíclico dada anteriormente. 2.2.2 Descripción de M-QCH y L-QCH El algoritmo QCH como se mencionó en el epígrafe 2.2 tiene dos variante sincrónicas, MQCH y L-QCH. Dichas variantes se construyen a partir del seudocódigo mostrado en la Figura 2.2, la diferencia entre ambas es el tipo de sistema de quórum que utilizan. M-QCH se basa en un sistema de quórum mayoritario para minimizar la longitud de cada fragmento de la secuencia de CH igual a 𝑛 y lograr un bajo MTTR. Por su parte, la variante L-QCH.
(33) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 20. utiliza un sistema de quórum mínimo, en (K. Bian and Chen, Sept.2009) se demuestra que al utilizarse este tipo de sistemas de quórum se garantiza el mínimo valor de la carga.. Entradas: 𝑁, 𝑛, 𝑆 Salidas: 𝑆𝑠 1: for 𝑗 ← 0 𝑎 (|𝑆| − 1) do 2: 3:. for 𝑑 ← 0 𝑎 (𝑁 − 1) do for 𝑖 ← 0 𝑎 (𝑛 − 1) do. 4:. if 𝑖 ⋲ 𝑆𝑗 them. 5:. 𝑠(𝑖+𝑑∗𝑛) ← ℎ𝑑 ;. 6:. else. 7:. ℎ ← 𝑟𝑎𝑛𝑑𝑖(1, 𝑁);. 8:. 𝑠(𝑖+𝑑∗𝑛) ← ℎ;. 9: 10: 11: 12:. end if end for end for return 𝑆𝑠𝑗 ← 𝑆𝑠 ∪ 𝑠. 13: end for. Figura 2.2. Seudocódigo para construir el sistema QCH. En el algoritmo representado en la Figura 2.2 se obtiene el sistema de secuencias de salto de canal que cada nodo cognitivo tendrá a su disposición, donde: cada par de secuencias tiene Rendezvous con otra secuencia en los N canales, 𝑛 es la longitud de cada fragmento, la cantidad de fragmentos de una secuencia es igual a N, el período de las secuencias es 𝑇 = 𝑁 ∗ 𝑛, 𝑆 es el sistema de quórum cíclico, |𝑆| es la cantidad de quórums del sistema, 𝑠 es una secuencia en particular, ℎ𝑑 es el canal que ocupa la posición 𝑑 del conjunto de los N canales, ℎ es un canal que se selecciona aleatoriamente de los N canales de la red y 𝑆𝑠 es el conjunto de secuencias de CH. La cantidad de secuencias del sistema QCH es igual al número de quórums. Para ambas variantes, se elige primero el set universal y seguidamente se construye el sistema de quórum 𝑆 teniendo en cuenta el tipo de sistema que se utiliza. Posteriormente se pasa a conformar la secuencia de CH 𝑠 a partir de cada quórum siguiendo el proceso siguiente, se hacen asignaciones de los canales para las 𝑛 ranuras en el primer fragmento de 𝑠 analizando si el valor de 𝑖 correspondiente está contenido dentro del quórum 𝑆𝑗 , si es así,.
(34) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 21. se selecciona el canal que ocupa la posición 𝑑 dentro de los N canales (líneas 4-5). Si por el contrario, dicho valor de 𝑖 no pertenece al quórum en cuestión se elige un canal aleatoriamente de los N canales de la red (líneas 6-9). El proceso se repite para el resto de los fragmentos de la secuencia y se obtiene la secuencia s (líneas 2-11). Realizando nuevamente las asignaciones de canales para cada uno de los quórums faltantes se obtiene el sistema de secuencias de CH, 𝑆𝑠 (líneas 1-13). Por ejemplo en (K. Bian and Chen, Sept.2009, K. Bian and Chen, 2011) se realiza el análisis para el M-QCH utilizando un sistema de quórum con un set universal con tamaño mínimo, 𝑛 = 3. El sistema de quórum mayoritario formado es 𝑆 = {{0 1}; {1 2}; {2 0}}. Posteriormente se escoge el quórum 𝑆0 = {0 1}, se realiza el procedimiento explicado anteriormente para la selección del canal y la secuencia queda como sigue: 0. 1. 2. 3. 4. 5. 6. 7. 8. 0. 0. 2. 1. 1. 0. 2. 2. 1. Las ranuras de tiempo destacadas en rojo están ocupadas por los canales que fueron seleccionados aleatoriamente. Repitiendo el proceso para 𝑆1 = {1 2} y 𝑆2 = {2 0} se obtienen las otras dos secuencias que junto con la anterior, conforman el sistema de secuencias, las mismas se muestran a continuación: Para 𝑆1 = {1 2}: 0. 1. 2. 3. 4. 5. 6. 7. 8. 1. 0. 0. 2. 1. 1. 0. 2. 2. Para 𝑆2 = {2 0}: 0. 1. 2. 3. 4. 5. 6. 7. 8. 0. 0. 2. 1. 1. 0. 2. 2. 1. Luego de obtenido el conjunto de secuencias de CH todos los nodos de la red RC tienen acceso al mismo conjunto de secuencias y eligen aleatoriamente una secuencia del conjunto. Posteriormente, cada nodo comienza a saltar en ella hasta que logran el Rendezvous con sus vecinos..
(35) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 22. 2.3 Descripción del algoritmo RCCH RCCH (Channel-Hopping Schemes for Cognitive Radio Networks) fue propuesto en (G. Y Chan and Sheu, 2012) y se desempeña en un escenario simétrico y asimétrico. Como requerimiento para su utilización el conjunto N de canales de la red debe ser un número par, además, los canales iniciales de las secuencias transmisoras y receptoras que necesiten lograr el Rendezvous deben tener igual paridad. Es un algoritmo basado en roles ya que en cada pareja de nodos que intentan encontrarse uno funge como transmisor y otro como receptor. Dicha pareja de nodos se denomina “potencial pareja de Rendezvous” (PRC, por sus siglas en inglés). RCCH plantea que cuando un nodo tiene información para transmitir, construye su secuencia alternativa. En la Figura 2.3 se muestra el seudocódigo para obtener el conjunto de secuencias de CH alternativas, 𝑆𝑠. Entradas: 𝑁 Salidas: 𝑆𝑠 1: for 𝑖 ← 0 𝑎 𝑁/2 2: 3:. for 𝑖 ← 0 𝑎 𝑁 if 𝑖 𝑚𝑜𝑑 2==0. 4:. 𝑝𝑎𝑟 ← cat(2, par, i). 5:. 𝑎 ←randi (N, 1);. 6:. end if. 7:. end for. 8:. for 𝑖 ← 0 𝑎 (𝑁 − 1) do. 9: 10:. 𝑠𝑖𝑛𝑡𝑖 ← (𝑎 − 𝑖 ∗ 𝑠𝑑)𝑚𝑜𝑑(𝑁); end for. 11:. 𝐼𝑛𝑖𝑐𝑖𝑎𝑙𝑖𝑧𝑎𝑟 𝑒𝑙 𝑎𝑟𝑟𝑒𝑔𝑙𝑜 𝑠 vacío;. 12:. for 𝑗 ≤ (𝑁 − 2) do. 13:. 𝑠𝑟𝑜𝑜𝑡 ← 𝑟𝑜𝑡𝑎𝑡𝑒(𝑠𝑖𝑛𝑡, 𝑗);. 14:. 𝑠 ← 𝑐𝑎𝑡(2, 𝑠, 𝑠𝑟𝑜𝑜𝑡). 15:. 𝑗 ← 𝑗 + 2;. 16:. end for. 17:. 𝑆𝑠𝑖 ← 𝑆𝑠 ∪ s. 18:. 𝑝𝑎𝑟 ← 𝑝𝑎𝑟 \{𝑎};. 19:. return 𝑆𝑠. 20: end for.
(36) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 23. Figura 2.3. Seudocódigo para obtener el conjunto de secuencias alternativas del transmisor. En dicho algoritmo, 𝑠𝑑 se denomina semilla y es el tamaño del salto de los canales de una ranura a otra, en este caso es tomado para el análisis 𝑠𝑑 = 1. Utiliza para construir las secuencias de CH la función 𝑟𝑜𝑡𝑎𝑡𝑒(𝑠𝑖𝑛𝑡, 𝑗) donde 𝑠𝑖𝑛𝑡 es la secuencia a rotar, en este caso es una secuencia obtenida en un paso intermedio antes de obtener la alternativa 𝑠; y 𝑗 es la cantidad de posiciones a rotar 𝑠𝑖𝑛𝑡. Por ejemplo si se tiene la secuencia 𝑠𝑖𝑛𝑡 = 2 1 0 5 4 3, la que se obtiene luego de aplicar la función 𝑟𝑜𝑡𝑎𝑡𝑒(𝑠𝑖𝑛𝑡, 𝑗) para 𝑗 = 2 es 0 5 4 3 2 1. El canal inicial de dicha secuencia tiene igual paridad que el de la secuencia 𝑠𝑖𝑛𝑡 y es una PRC con la secuencia que 𝑠𝑖𝑛𝑡 sea una PRC. Para construir las secuencias, primeramente se elige aleatoriamente un canal inicial 𝑎 del arreglo 𝑝𝑎𝑟 que guarda todos los números pares comprendidos dentro de los N canales, en este caso se ha elegido para el análisis que la paridad del canal inicial sea par (líneas 2-6). Posteriormente a la selección del canal inicial, se construye una secuencia intermedia denominada 𝑠𝑖𝑛𝑡 (líneas 8-10) en contra del sentido de las manecillas del reloj como sigue 𝑠𝑖𝑛𝑡 = {(0, (𝑎 − 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑𝑁), (1, (𝑎 − 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑 𝑁) … . . (𝑁 − 1, (𝑎 − 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑𝑁)} donde. 𝑖 = {0, . . (𝑁 − 1)}.. Luego. se. obtiene. la. secuencia. alternativa. concatenando con la secuencia 𝑠𝑖𝑛𝑡, (N/2-1) secuencias rotadas con respecto a 𝑠𝑖𝑛𝑡. Las secuencias rotadas 𝑗 posiciones se guardan en la variable 𝑠𝑟𝑜𝑜𝑡 (líneas 12-16). Luego de construida la secuencia alternativa se retira del arreglo 𝑝𝑎𝑟 el canal utilizado (línea 18). Realizando el proceso N/2 veces se obtiene el conjunto de secuencias para la transmisión 𝑆𝑠(líneas 1-19). Por ejemplo, si se tienen un conjunto de canales N=6 y 𝑎 = 4, la secuencia intermedia obtenida es 𝑠𝑖𝑛𝑡 = 4 3 2 1 0 5 y la secuencia alternativa luego de concatenar N/2-1 secuencias rotadas de 𝑠𝑖𝑛𝑡 es: 4 3 2 1 0 5 2 1 0 5 1 4 3 0 1 5 4 3 2. Por otra parte, si un nodo no tiene información para enviar construye su secuencia por defecto. En la Figura 2.4 se muestra el seudocódigo para obtener el conjunto de secuencias por defecto. Primero, se escoge aleatoriamente un canal inicial 𝑏 con igual paridad que 𝑎 siguiendo igual procedimiento que para la secuencia alternativa (líneas 2-6). Luego, se construye la 𝑠𝑖𝑛𝑡 en el sentido de las manecillas del reloj como sigue: 𝑠𝑖𝑛𝑡 = {(0, (𝑏 +.
(37) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑 𝑁), (1, (𝑏 + 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑𝑁) … . . (1, (𝑏 + 𝑠𝑑 ∗ 𝑖)𝑚𝑜𝑑𝑁)}. donde. 24 𝑖=. {0, . . 𝑁 − 1} (líneas 8-10). Posteriormente, se obtiene la secuencia por defecto concatenando N/2 secuencias 𝑠𝑖𝑛𝑡. Para obtener 𝑆𝑠 se repite el proceso 𝑁/2 veces. Por ejemplo, siguiendo el análisis hecho para la secuencia alternativa, si N=6 y el canal inicial 𝑏 = 0, la secuencia intermedia es 𝑠𝑖𝑛𝑡 = 0 1 2 3 4 5 y la secuencia por defecto luego de concatenar N/2 secuencias 𝑠𝑖𝑛𝑡 es 𝑠 = 0 1 2 3 4 5 0 1 2 3 4 5 0 1 2 3 4 5. Entradas: 𝑁 Salidas: 𝑆𝑠 1: for 𝑖 ← 0 𝑎 𝑁/2 2: 3:. for 𝑖 ← 0 𝑎 𝑁 if 𝑖 𝑚𝑜𝑑 2==0. 4:. 𝑝𝑎𝑟 ← cat(2, par, i). 5:. 𝑏 ←randi(N, 1);. 6:. end if. 7:. end for. 8:. for 𝑖 ← 0 𝑎 (𝑁 − 1) do. 9:. 𝑠𝑖𝑛𝑡𝑖 ← (𝑏 + 𝑖 ∗ 𝑠𝑑)𝑚𝑜𝑑 𝑛;. 10:. end for. 11:. 𝐼𝑛𝑖𝑐𝑖𝑎𝑙𝑖𝑧𝑎𝑟 𝑒𝑙 𝑎𝑟𝑟𝑒𝑔𝑙𝑜 𝑠 vacío ;. 12:. for 𝑗 ≤ (𝑁/2) do. 13:. 𝑠 ← 𝑐𝑎𝑡(𝑠, 𝑠𝑖𝑛𝑡);. 14:. 𝑗 ← 𝑗 + 1;. 15:. end for. 16:. 𝑆𝑠𝑖 ← 𝑆𝑠 ∪ s. 17:. 𝑝𝑎𝑟 ← 𝑝𝑎𝑟 \{𝑏};. 18:. return 𝑆𝑠. 19: end for. Figura 2.4. Seudocódigo para obtener el conjunto de secuencias por defecto. Finalmente, el transmisor y el receptor seleccionan una secuencia alternativa y una por defecto respectivamente, para lograr el encuentro. RCCH garantiza que cualquier par de nodos PRC cumpla una de las condiciones siguientes: deben visitar canales pares en ranuras de tiempo pares y canales impares en ranuras de tiempo impares, o como segunda condición, deben visitar canales pares en ranuras impares y canales impares en ranuras.
(38) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 25. pares. Siguiendo esta línea, una secuencia tiene paridad de tiempo par si cumple la primera condición o paridad de tiempo impar si cumple la segunda condición. 2.4. Descripción del algoritmo ETCH. El protocolo ETCH (Efficient Channel Hopping for Communication Rendezvous in Dynamic Spectrum Access Networks) posee la ventaja de que el tiempo promedio para alcanzar el Rendezvous es relativamente corto (Y. Zhang and Wang, 2011). En (Y. Zhang and Wang, 2011) se plantea que dicho algoritmo utiliza secuencias de CH cumpliendo con 3 requisitos básicos de diseño. Primeramente el solapamiento, donde se plantea que cualquier par de secuencias del conjunto de secuencias de los nodos cognitivos debe solaparse en una ranura de tiempo. Un segundo requisito constituye la utilización de todos los canales de Rendezvous en cada ranura de tiempo y como tercer punto está la probabilidad de utilización de los canales de Rendezvous donde, todos los canales de Rendezvous tienen igual probabilidad de aparecer en cada secuencia. En (Y. Zhang and Wang, 2013) se propone la variante sincrónica de ETCH, SYNC-ECTH en dos fases y en una sola fase, ambas variantes se complementan. La variante en dos fases se puede aplicar a un número arbitrario de canales de la red aunque, no garantiza que todos los canales de Rendezvous tengan igual probabilidad de aparición; la construcción en una sola fase garantiza este último criterio pero solo es aplicable a redes con un número impar de N. En este epígrafe se describirá el algoritmo SYNC-ETCH en dos fases producto a que su diseño es más general en términos de N, y posibilita realizar una posterior comparación del mismo con el resto de los algoritmos presentados en las secciones anteriores recordando que RCCH solo es aplicable en redes con una cantidad par de N y utilizar SYNC-ETCH en una fase constituye un inconveniente para dicha comparación. 2.4.1 Descripción del algoritmo SYNC-ETCH en dos fases SYNC-ETCH en dos fases consta de 3 partes fundamentales: el intervalo de Rendezvous, la asignación de los canales de encuentro y la ejecución de la secuencia de CH. Para un nodo establecer la comunicación con otro nodo mediante la utilización de este protocolo sigue una serie de pasos, primero, se construye un conjunto de 2N secuencias de CH en dos fases, en un primer momento se le asignan a los horarios o ranuras de Rendezvous los pares de.
(39) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 26. secuencias que se encuentran en cada uno de ellos, denominándose esta fase I: fase de horarios de Rendezvous (Y. Zhang and Wang, 2013). La fase de horarios de Rendezvous se construye a partir del seudocódigo de la Figura 2.5. En esta fase se construyen 2N-1 intervalos de encuentro, para lograr que cada secuencia logre el Rendezvous con otras 2N-1 secuencias. Entradas: 𝑆𝑠 Salidas: 𝑆𝑙 1: 𝐼𝑛𝑖𝑐𝑖𝑎𝑙𝑖𝑧𝑎𝑟 𝑆𝑙 = {𝑆𝑙0 , 𝑆𝑙1 , . . . . 𝑆𝑙(2𝑁−2) 𝑣𝑎𝑐í𝑜𝑠 2: for 𝑠𝑙 ← 0 𝑎 (2𝑁 − 2) do 3:. 𝑉 ← 𝑆𝑠\{𝑆𝑠(2𝑁−1) };. 4:. for 𝑖 ← 0 𝑎 (𝑁 − 1) do. 5:. 𝑐 ← 𝑆𝑒𝑙𝑒𝑐𝑐𝑖𝑜𝑛𝑎𝑟 𝑒𝑙 𝑚𝑒𝑛𝑜𝑟 í𝑛𝑑𝑖𝑐𝑒 𝑠𝑢𝑠𝑐𝑟𝑖𝑡𝑜 𝑎 𝑉;. 6:. if 𝑐 ≤ 𝑠𝑙 them. 7:. 𝑒 ← 𝑠𝑙 − 𝑐;. 8:. else. 9:. 𝑒 ← 2𝑁 − 1 + 𝑠𝑙 − 𝑐;. 10:. end if. 11:. if 𝑐 == 𝑒 them. 12:. 𝑒 ← 2𝑁 − 1;. 13: 14:. end if 𝑑𝑖 ← {𝑠𝑐 ; 𝑠𝑒 };. 15:. 𝑆𝑙𝑠𝑙 ← 𝑆𝑙𝑠𝑙 ∪ {𝑑𝑖};. 16:. 𝑉 ← 𝑉\{𝑆𝑠𝑒; 𝑆𝑠𝑐};. 17:. end for. 18: return 𝑆𝑙; 19: end for. Figura 2.5. Seudocódigo para la Fase I de SYNC-ETCH, la construcción de las ranuras de Rendezvous.. En la Figura 2.5, 𝑆𝑠 = { 𝑆𝑠0 , 𝑆𝑠1 , … . 𝑆𝑠(2𝑁−1)} es el arreglo de secuencias de CH sin canales asignados, 𝑆𝑙 = {𝑆𝑙0 , 𝑆𝑙1 , . . . . 𝑆𝑙(2𝑁−2) } es el conjunto de intervalos de encuentro y 𝑉 ∈ 𝑆𝑠, tal que 𝑉 ≠ 𝑆𝑠(2𝑁−1) . En dicho algoritmo, primeramente, se emparejan cada uno de los posibles N pares de secuencias en cada una de las ranuras (líneas 2-19) donde 𝑑𝑖 son las secuencias emparejadas que se encuentran en la ranura 𝑠𝑙 (líneas 4-14), 𝑐 es el menor.
(40) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 27. índice de las secuencias suscritas a V y 𝑒 es el índice de la secuencia que se emparejará con 𝑠𝑐 . Posteriormente, se asignan cada uno de dichos pares a la ranura de Rendezvous correspondiente (línea 15) y se retiran de 𝑉 las secuencias que han sido emparejadas en cada una de las 𝑖 ranuras (línea 16). Por ejemplo si se tiene una cantidad de canales de la red igual a N=3, se obtienen un conjunto de 6 secuencias que serán emparejadas en 5 ranuras de tiempo, realizando el procedimiento anterior las secuencias emparejadas en cada ranura de tiempo son: 𝑆𝑙0 = {(𝑠0 , 𝑠5 ), (𝑠1 , 𝑠4 ), (𝑠2 , 𝑠3 )} 𝑆𝑙1 = {(𝑠0 , 𝑠1 ), (𝑠2 , 𝑠4 ), (𝑠3 , 𝑠5 )} 𝑆𝑙2 = {(𝑠0 , 𝑠2 ), (𝑠1 , 𝑠5 ), (𝑠3 , 𝑠4 )} 𝑆𝑙3 = {(𝑠0 , 𝑠3 ), (𝑠1 , 𝑠2 ), (𝑠4 , 𝑠5 )} 𝑆𝑙4 = {(𝑠0 , 𝑠4 ), (𝑠1 , 𝑠3 ), (𝑠2 , 𝑠5 )} Como segundo paso para obtener las secuencias de CH se procede a la fase dos: la asignación de los canales para el encuentro a las 2N secuencias teniendo en cuenta las secuencias emparejadas en cada una de las ranuras de Rendezvous obtenidas de la primera fase, 𝑆𝑙. Este proceso tiene el objetivo fundamental de que todos los canales de encuentro se utilicen en cada ranura de tiempo. La asignación de los canales se realiza acorde al seudocódigo presentado en la Figura 2.6 donde 𝐶 = {𝐶0 , 𝐶1 … . 𝐶(𝑁−1) } es el conjunto de canales a asignarle a las secuencias. En esta fase, para hacer un seguimiento de la asignación de los canales para cada secuencia en cada ranura o sea, registrar los canales de encuentro que no han sido asignados, se utiliza la variable seqOC (líneas 1-3) y 𝑠𝑙𝑜𝑡𝑂𝐶 se encarga de inicializar todos los canales para el Rendezvous. Para cada ronda 𝑠𝑙, el algoritmo chequea el conjunto de secuencias emparejadas 𝑑 y selecciona el par 𝑑𝑖 = (𝑠𝑜 ; 𝑠𝑝 ) cuya suma de los canales pendientes por asignar de 𝑠𝑒𝑞𝑂𝐶𝑜 y 𝑠𝑒𝑞𝑂𝐶𝑝 es la mayor, 𝑜 y 𝑝 son los índices de las secuencias del par que cumple esta condición (línea 9). Si múltiples pares producen igual suma entonces se toma el par que tenga la secuencia con menor índice. Luego de seleccionar las secuencias emparejadas se procede a asignar el canal de encuentro como sigue: se selecciona 𝑚 que es el índice de la secuencia con más canales pendientes de la pareja seleccionada y esta secuencia es denotada como 𝑠𝑒𝑞𝑂𝐶𝑚 (línea 10). El canal a.
(41) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 28. asignar es seleccionado de la intersección entre 𝑠𝑒𝑞𝑂𝐶𝑚 y 𝑠𝑙𝑜𝑡𝑂𝐶 , si dicha intersección es vacía, entonces se selecciona el canal denotado como 𝑐ℎ de 𝑠𝑙𝑜𝑡𝑂𝐶 que aparezca la menor cantidad de veces en 𝑠𝑚 (líneas 11-15). El canal seleccionado se elimina de 𝑠𝑙𝑜𝑡𝑂𝐶 y se asigna a las secuencias emparejadas (líneas 16-17). Luego de concluir una ronda de 𝑠𝑙, se le asignan nuevamente los canales de encuentro a 𝑠𝑙𝑜𝑡𝑂𝐶 para el siguiente valor de 𝑠𝑙 (línea 5) y se repite sucesivamente el proceso hasta obtener el conjunto de secuencias 𝑆𝑠 de que dispondrá cada nodo cognitivo (líneas 4-19). Entradas: 𝑆𝑙, 𝐶 Salidas: 𝑆𝑠 1: for 𝑗 ← 0 𝑎 (2𝑁 − 1) do 2:. 𝑠𝑒𝑞𝑂𝐶𝑗 ← {𝐶};. 3: end for 4: for 𝑠𝑙 ← 0 𝑎 (2𝑁 − 2) do 5:. 𝑠𝑙𝑜𝑡𝑂𝐶 ← {𝐶};. 6:. for 𝑖 ← 0 𝑎 𝑁 − 1 do. 7:. 𝑀𝑎𝑟𝑐𝑎𝑟 𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎𝑠. 8:. while 𝑠𝑙𝑜𝑡𝑂𝐶 ≠ ∅ do. 𝑑𝑖 ∈ 𝑆𝑙𝑠𝑙 𝑐𝑜𝑚𝑜 𝑎𝑠𝑖𝑔𝑛𝑎𝑑𝑎𝑠;. 9:. 𝑑𝑖 ← 𝑆𝑒𝑙𝑒𝑐. 𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎𝑠;. 10:. 𝑚 ← 𝑠𝑒𝑞𝑂𝐶𝑜 ≥ 𝑠𝑒𝑞𝑂𝐶𝑝 ? 𝑜: 𝑝;. 11:. if 𝑠𝑜𝑙𝑡𝑂𝐶𝑜 ∩ 𝑠𝑒𝑞𝑂𝐶𝑚 them. 12:. 𝑐ℎ ← 𝑐𝑎𝑛𝑎𝑙 𝑒𝑛 𝑠𝑙𝑜𝑡𝑂𝐶(𝑜) ∩ 𝑠𝑒𝑞𝑂𝐶𝑚 𝑐𝑜𝑛 𝑒𝑙 𝑚𝑒𝑛𝑜𝑟 í𝑛𝑑𝑖𝑐𝑒;. 13:. 𝑠𝑒𝑞𝑂𝐶𝑚 ← 𝑠𝑒𝑞𝑂𝐶\{𝑐}; else. 14:. 𝑐ℎ ← 𝑐𝑎𝑛𝑎𝑙 𝑒𝑛 𝑠𝑙𝑜𝑡𝑂𝐶 𝑞𝑢𝑒 𝑎𝑝𝑎𝑟𝑒𝑐𝑒 𝑚𝑒𝑛𝑜𝑟 𝑐𝑎𝑛𝑡𝑖𝑑𝑎𝑑 𝑑𝑒 𝑣𝑒𝑐𝑒𝑠 𝑒𝑛 𝑠𝑚 ;. 15:. end if. 16:. 𝑆𝑠𝑖 ← 𝑠𝑖 ∪ (𝑠𝑙, 𝑐ℎ);. 17:. 𝑆𝑠𝑗 ← 𝑠𝑗 ∪ (𝑠𝑙, 𝑐ℎ);. 18:. slotOC ← slotOC\{ch};. 19: 20:. end for return 𝑆𝑠. 19: end for. Figura 2.6. Seudocódigo para la Fase II de asignación de los canales de Rendezvous en SYNC-ETCH..
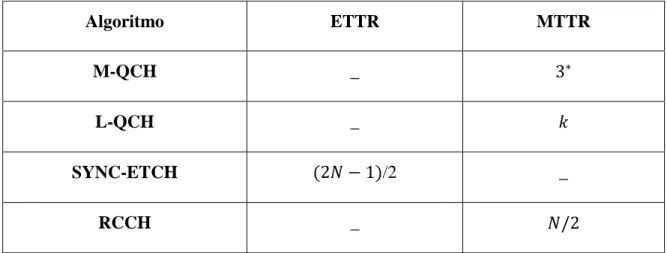
(42) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 29. Siguiendo el ejemplo dado para ilustrar la fase I, se toman las secuencias emparejadas en dicha fase y se procede a la asignación de los canales de Rendezvous, el conjunto de secuencias obtenidas se ilustra a continuación: 𝑠0 = 1. 3. 3. 2. 2. 𝑠1 = 2. 3. 1. 1. 3. 𝑠2 = 3. 2. 3. 1. 1. 𝑠3 = 3. 1. 2. 2. 3. 𝑠4 = 2. 2. 2. 3. 2. 𝑠5 = 1 1. 1. 3. 1. Luego de finalizar la construcción de las secuencias, todos los nodos de la red obtienen un mismo conjunto de secuencias de CH. Cada nodo se sincroniza con los otros existentes utilizando el mecanismo de sincronización global. A continuación, los nodos seleccionan una secuencia de CH diferente, después visitan todas las ranuras de Rendezvous, seleccionan una secuencia de CH nuevamente y comienzan a saltar en ella. La razón por la cual los nodos vuelven a seleccionar una secuencia de CH cuando termina una, es para asegurarse de que cualquier par de nodos sean capaces de reunirse en diferentes canales de encuentro. 2.5. Métricas para evaluar el desempeño de los algoritmos de Rendezvous. Una de las métricas descritas en la literatura, es el tiempo máximo para lograr el Rendezvous (MTTR). Constituye el máximo tiempo posible para que un par de secuencias en un sistema de CH se encuentren en un canal disponible cuando todos los canales están disponibles. El tiempo promedio para lograr el Rendezvous (ETTR) es otra de las métricas utilizadas para evaluar el comportamiento de los algoritmos de Rendezvous, la misma no es más que el número de ranuras de tiempo que dos nodos cognitivos necesitan saltar como promedio antes de que puedan encontrarse. Cuanto menor sea, más rápido los nodos logran el Rendezvous. La Tabla 2.1 muestra los resultados matemáticos para los algoritmos discutidos en los epígrafes anteriores de ETTR o MTTR para un escenario ideal. Aquellos.
(43) CAPÍTULO 2. CARACTERIZACIÓN DE ALGORITMOS DE RENDEZVOUS SINCRÓNICOS. 30. algoritmos cuyos valores de una métrica u otra no aparecen es debido a que la misma no es definida por los autores del algoritmo en cuestión. Tabla 2.1.Métricas para evaluar el comportamiento de los algoritmos de Rendezvous. Algoritmo. ETTR. MTTR. M-QCH. _. 3∗. L-QCH. _. 𝑘. SYNC-ETCH. (2𝑁 − 1)/2. _. RCCH. _. 𝑁/2. *En (K. Bian and Chen, Sept.2009) obtienen este resultado teórico utilizando un set universal de tres elementos.. 2.6. Consideraciones Finales. La red RC en cuestión cuenta con un número de N canales y para analizar el comportamiento de la misma en cada uno de los algoritmos estudiados se utilizan tres escenarios de simulación, un escenario ideal, uno simétrico y otro asimétrico. Para simular el comportamiento de los UP se utiliza un modelo de Gilbert-Eliot. Los algoritmos de encuentro sincrónicos presentados en la literatura descritos en este capítulo son el QCH en sus variantes sincrónicas M-QCH y L-QCH, así como el RCCH y ETCH. El primero de los algoritmos estudiados, el QCH, se basa en los sistemas de quórum cíclicos y saca provecho de la propiedad de intersección de los mismos. La diferencia entre las variantes sincrónicas presentadas, M-QCH y L-QCH, radica en el tipo de sistema de quórum cíclico utilizado, la primera utiliza un sistema de quórum cíclico mayoritario y la segunda, un sistema de quórum mínimo. El principal inconveniente de la primera variante es debido a la elevada carga experimentada en el canal de encuentro producto a los pequeños valores presentados de TTR que se traduce en un cuello de botella. L-QCH reduce la carga experimentada en el canal de Rendezvous pero con un consecuente aumento del TTR. Ambas variantes solo son factibles bajo un modelo simétrico de la red..
Figure




+7





Documento similar