Control por modo deslizante basado en proxy de una plataforma con tres grados de libertad
84
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingenierı́a Eléctrica Departamento de Automática y Sistemas Computacionales. Tesis de Maestrı́a. Control por modo deslizante basado en proxy de una plataforma con tres grados de libertad Tesis presentada en opción al grado de Máster en Automática y Sistemas Informáticos Autor: Ing. Pablo José Prieto Entenza email: pablop@uclv.edu.cu Departamento de Automática y Sistemas Computacionales, FIE, UCLV. Tutor: Dr. Ángel Ernesto Rubio Rodrı́guez email: rubio@uclv.edu.cu Departamento de Automática y Sistemas Computacionales, FIE, UCLV. Dr. Luis Hernández Santana email: luish@uclv.edu.cu Departamento de Automática y Sistemas Computacionales, FIE, UCLV. Santa Clara 2013.
(3) “Me volvı́ y vi debajo del sol, que ni es de los ligeros la carrera, ni la guerra de los fuertes, ni aún de los sabios el pan, ni de los prudentes las riquezas, ni de los elocuentes el favor sino que tiempo y ocasión acontecen a todos”.. Eclesiastés 9:11. i.
(4) Dedicatoria A mis padres y hermano por el apoyo y la confianza que siempre me han dado. A Jaque, mi retaguardia, que me ha seguido en mis locuras y sueños. A mis amigos y hermanos, los que están y no están.. ii.
(5) Agradecimientos Este trabajo es el resultado de años de perseverancia. Ante todo se abrió para mı́ un nuevo campo del conocimiento que demandó paciencia y más paciencia. Sin lugar a dudas anduvo la mano de Rubio, más que tutor, amigo a quién mi admiración hacia su persona es un hecho que de sobra es sabido en nuestros cı́rculos. A él agradezco las oportunidades que me ha dado en más de miles de ocasiones. A lo largo de la etapa investigativa, en respiraciones profundas producto de reveses, en las miles de veces que he sido rebotado por la ciencia, siempre las manos amigas han sido extendidas sobre mis hombros. Esas manos han sido de mis amigos, compañeros y estudiantes del 117 que nunca dejaron que me cayera y nunca faltaron palabras de ánimo. A esos paños de lágrimas que me han rodeado Yasser, Alfredo, Raunel, Teje, Rolo, Rodney, Janet, los Fı́rvidas, Mabeilis, Duniesky, Dainer, Calixta y sobre todo a tı́, Sami Igab, que aunque lejos estés en mi corazón y alma estás; y a otros que se han olvidado en esta escritura, gracias por todo. A Valeriano y Urquijo que llevan cargando con este individuo desde el 2004 hasta la actualidad. Gracias por todo. Siempre han sido amigos y fieles consejeros. Nunca olvidaré las veces que me he apoyado en ustedes cuando la frustración minaba mi vida.Un especial agradecimiento a Valeriano, sin dudas, fue usted la persona que alentó para la escritura del artı́culo cuando muchos lo daban por investigación perdida. A Yidier Pérez de Alejo, gracias por el aporte hecho a la metodologı́a de esta investigación, tus crı́ticas fueron un viraje en el enfoque de este trabajo. Sin dudas con ello se pudo armar el muñeco. Merci par vous connaissez. A aquellos que nunca pensaron que llegarı́a hasta aquı́, ellos han sido impulsores de mi trabajo, por ellos, lo que era un sueño se convirtió en obsesión y el fracaso, en perseverancia. iii.
(6) Agradecimientos Al profesor Abreu por los innumerables consejos, sin dudas, es cátedra de la cual todos y cada uno de nosotros debemos aprender. No niego mi admiración por su persona. Nunca el conocimiento se ha vuelto tan concentrado como en sus manos. A aquellos profesores que jugaron un papel fundamentales y positivo en mı́: Arturo Ruiz y Rolando Alfonso. Por último y más especial a mis padres, hermano, y esposa, no hay palabras para reflejar lo que siempre han representado para mı́ en buenos y malos momentos. Pablo. Santa Clara, 2013.. iv.
(7) Resumen Los robots paralelos se utilizan en diversas aplicaciones donde se aprovechan sus disı́miles ventajas: elevada fuerza, precisión y repetitividad. Son conocidos sus problemas en cuanto a lı́mite de área de trabajo, singularidades mecánicas y complejidad estructural; lo cual complica su modelado y control. No obstante, para aplicaciones como los simuladores de conducción y vuelo, que requieren mover elevadas cargas con relativa precisión y no necesitan un área de trabajo muy grande, son las estructuras ideales. Para el correcto funcionamiento de los robots paralelos se requieren un constante control del posicionamiento de los elementos activos del sistema, que gobiernan la movilidad del mismo. Las complejas no linealidades del sistema, dificultan aún más su desempeño. El Grupo de Automática Robótica y Percepción (GARP) tiene la tarea de desarrollar estrategias de control para sistemas no lineales aplicados en robots paralelos, esta vez, controles no lineales debido a las ventajas de los mismos. En este trabajo son expuestos criterios seguidos para el uso de estrategias de control en modo deslizante (SMC ) por la efectividad del mismo ante elementos altamente no lineales. Se hace énfasis en las limitaciones del control deslizante y por ende en la necesidad de buscar variantes del mismo para resolver su principal problema, el chattering que deteriora su desempeño en la práctica. Son descritas, a lo largo de la tesis, las diferentes variantes para resolver y eliminar este fenómeno, donde se hace énfasis en una variante llamada Control por modo deslizante basado en proxy (PSMC ) que combina las ventajas de Control en modo Deslizante y del PID. Algunos resultados obtenidos durante pruebas experimentales y simulación demuestran las ventajas de dicho algoritmo de control. v.
(8) Índice general Dedicatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. II. Agradecimientos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. III. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. V. Índice general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. VI. Índice de figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. VIII. Índice de tablas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. X. 1. Introducción . . . . . . . . . 1.1. El problema y la hipótesis 1.2. Objetivos y resultados . . 1.3. Estructura del informe . .. . . . .. . . . .. . . . .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. 1 2 2 3. 2. Robótica paralela y Control en Modo Deslizante . . 2.1. Caracterı́sticas de los robots paralelos . . . . . . . . . . 2.1.1. Robots planares . . . . . . . . . . . . . . . . . . 2.1.2. Robots espaciales . . . . . . . . . . . . . . . . . 2.1.3. Campo de aplicación de los robots paralelos . . 2.2. Actuadores neumáticos . . . . . . . . . . . . . . . . . . 2.3. Control desacoplado . . . . . . . . . . . . . . . . . . . 2.4. Control en Modo Deslizante . . . . . . . . . . . . . . . 2.5. Diseño del controlador . . . . . . . . . . . . . . . . . . 2.6. Robustez del control en modo deslizante . . . . . . . . 2.7. Chattering . . . . . . . . . . . . . . . . . . . . . . . . . 2.7.1. Observadores en Modo Deslizante . . . . . . . . 2.7.2. Alto Orden en Modo Deslizante(HOSMC) . . . 2.7.3. Modo Deslizante basado en Fuzzy(FSMC) . . . 2.7.4. Modo Deslizante basado en Proxy(PSMC) . . . 2.8. Conclusiones parciales . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . .. 5 5 6 7 8 10 11 13 16 19 20 23 24 26 29 30. 3. Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1. Plataforma de tres grados de libertad (3 GDL) . . . . . . . . . . . . . .. 32 32. vi.
(9) Índice general 3.2. Modelo dinámico de un actuador neumático . . 3.2.1. Flujo másico en las válvulas . . . . . . . 3.2.2. Dinámica de las presiones de las cámaras 3.2.3. Balance de fuerzas del cilindro . . . . . . 3.3. Paquete de simulación para sistemas mecánicos 3.4. Conclusiones parciales . . . . . . . . . . . . . .. . . . . . .. . . . . . .. 34 37 39 40 43 46. 4. Modo deslizante basado en proxy para una plataforma de 3 GDL 4.1. Control basado SMC . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Experimentos con PID . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Modo deslizante basado en proxy . . . . . . . . . . . . . . . . . . . . 4.3.1. Función de signo y saturación . . . . . . . . . . . . . . . . . . 4.3.2. Proxy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3.3. Ley de control en modo continuo . . . . . . . . . . . . . . . . 4.3.4. Representación en el régimen continuo . . . . . . . . . . . . . 4.3.5. Ajuste de los parámetros del PSMC . . . . . . . . . . . . . . . 4.3.6. Experimentos con PSMC . . . . . . . . . . . . . . . . . . . . . 4.4. Conclusiones parciales . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . .. 48 48 52 55 56 57 58 59 61 62 64. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 67. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 68. vii. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . ..
(10) Índice de figuras 2.1. Ejemplo de robots planares de dos grados de libertad. . . . . . . . . . .. 6. 2.2. Ejemplos de diferentes tipos de manipuladores planos con actuadores prismáticas y rotacionales. . . . . . . . . . . . . . . . . . . . . . . . . .. 7. 2.3. Robots paralelos espaciales. . . . . . . . . . . . . . . . . . . . . . . . .. 8. 2.4. Robot paralelo en aplicaciones médicas. . . . . . . . . . . . . . . . . . .. 9. 2.5. Ejemplos de simuladores de vuelo. . . . . . . . . . . . . . . . . . . . . .. 9. 2.6. Efecto del control en modo deslizante sobre la trayectoria de un sistema de segundo orden representado en espacio estado. . . . . . . . . . . . .. 15. 2.7. Diagrama a bloques de un lazo de control ideal en modos deslizantes. Un controlador discontinuo obliga a la señal de salida y(t) de la planta que siga a la trayectoria de referencia xd(t). . . . . . . . . . . . . . . . . . .. 18. 2.8. Representación del efecto chattering resultado de la acción del control deslizante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 21. 2.9. Función de saturación reemplazada para el controlador discontinuo. En lugar de que operen los modos deslizantes en forma ideal, las trayectorias del sistema son confinadas a la región interna de s(t) = 0. . . . . . . . .. 22. 2.10. Lazo de control con lazo auxiliar del observador. . . . . . . . . . . . . .. 23. 2.11. Convergencia para un sistema de Segundo Orden en Modo Deslizante. .. 26. 2.12. Forma tı́pica de funciones de pertenencia: 1-triangular, 2-trapezoidal, 3gaussiana, 4-campana generalizada, 5-singleton. . . . . . . . . . . . . .. 27. 2.13. Diagrama de Fuzzy basado en Modo Deslizante . . . . . . . . . . . . .. 29. 3.1. Robot paralelo SIMPRO y arquitectura RPSU-2SPS del mecanismo. . .. 33. 3.2. Esquema de un sistema neumático. . . . . . . . . . . . . . . . . . . . .. 37. 3.3. Representación de los flujos de aire . . . . . . . . . . . . . . . . . . . .. 38. 3.4. Caracterı́stica estática del área efectiva de válvula en función de la acción de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 39. viii.
(11) Índice de figuras 3.5. Modelos de la fuerzas de fricción . . . . . . . . . . . . . . . . . . . . . .. 42. 3.6. Plataforma de 3 GDL en ADAMS. . . . . . . . . . . . . . . . . . . . .. 44. 3.7. Interfaz de comunicación Simulink-ADAMS. . . . . . . . . . . . . . . .. 45. 3.8. Modelo neumático en Simulink-ADAMS. . . . . . . . . . . . . . . . . .. 46. 4.1. Diagrama de bloques para la identificación dinámica del sistema neumático 49 4.2. Esquema en Simulink de la ley de control en modo deslizante. . . . . .. 51. 4.3. Simulación en ADAMS ante entrada escalón como referencia . . . . . .. 52. 4.4. Simulación en MSC ADAMS ante una trayectoria sinusoidal como referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 53. 4.5. Referencia y respuesta del sistema para el diseño del PID. . . . . . . .. 54. 4.6. Señal de mando (en unidades de volts) sobre cada uno de los actuadores. 55 4.7. Equivalencia entre la función y = sgn(x-y) y y = sat(x). . . . . . . . .. 56. 4.8. Interpretación fı́sica de un lazo de retroalimentación con la inclusión del proxy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 57. 4.9. Diagrama de bloque en Simulink del PSMC. . . . . . . . . . . . . . . .. 60. 4.10. Esquema del control desacoplado basado en PSMC. . . . . . . . . . . .. 62. 4.11. Referencia y trayectoria del primer, segundo y tercer actuador neumático con PSMC en Simulink-ADAMS. . . . . . . . . . . . . . . . . . . . . .. 63. 4.12. Acción de mando procedente del primer, segundo y tercer actuador neumático con PSMC en Simulink-ADAMS. . . . . . . . . . . . . . . . . . . . . . 64 4.13. Referencia y trayectoria del primer, segundo y tercer actuador neumático con PSMC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 65. 4.14. Acción de control del primer, segundo y tercer actuador neumático con PSMC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 66. ix.
(12) Índice de tablas 3.1. Actuadores involucrados en la mobilidad del robot . . . . . . . . . . . .. 33. 3.2. Principales descripciones del robot paralelo. . . . . . . . . . . . . . . .. 34. 4.1. Ajustes de los parámetros del PID . . . . . . . . . . . . . . . . . . . . .. 53. 4.2. Ajustes de los parámetros del PSMC . . . . . . . . . . . . . . . . . . .. 62. x.
(13) Capı́tulo 1 Introducción La robótica paralela ha ganado interés en la comunidad cientı́fica internacional. En los últimos años se ha observado un aumento del número de publicaciones en este campo. Entre otras virtudes los robots de estructura paralela poseen excelente relación masa-carga, alta velocidad de movimiento y buena repetitividad. No obstante su estudio implica disı́miles retos: por la complejidad en su análisis, diseño y las singularidades que presenta su estructura mecánica. Ello, sin lugar a dudas, dificulta la obtención de los modelos cinemáticos y dinámicos con el consiguiente aumento de la complejidad el diseño de algoritmos de control. Muchos robots paralelos tienen, como actuadores, cilindros neumáticos de desplazamiento lineal que convierten la energı́a del aire comprimido en trabajo mecánico. Los actuadores neumáticos tienen una amplia utilización industrial por ser una tecnologı́a limpia, de bajo costo, respuesta rápida, elevada relación potencia-peso y fácil mantenimiento. En los últimos años estos actuadores se han venido introduciendo en aplicaciones que requieren posicionamiento continuo tales como: robots paralelos, plataformas de simulación y otras. No obstante la dinámica de los actuadores neumáticos es altamente no lineal, debido a la compresibilidad del aire, el comportamiento no lineal del flujo de aire a través de las válvulas. A lo anterior se une también la existencia de fuerzas de fricción estáticas y dinámicas entre el cilindro y el pistón que provocan serias perturbaciones al sistema y dificultan el control de los mismos. Una de las estrategias de control, caracterizada por su robustez e independencia del modelo matemático de la planta, es el Control por Modo Deslizante (SMC) la cual ha sido muy estudiada en los últimos años. Los sistemas de control por modo deslizante 1.
(14) Capı́tulo 1: Introducción tienen la capacidad de ser una herramienta eficiente ante plantas complejas de alto orden y dinámicas no lineales que operan bajo condiciones inciertas.. 1.1.. El problema y la hipótesis. Sin embargo presenta un problema fundamental que puede contribuir al deterioro de los sistemas electro-mecánicos y es el fenómeno del chattering que ha impedido a lo largo de tiempo implementar estrategias en modo deslizante en sistemas fı́sicos reales. Muchos autores han propuesto alternativas de solución al problema aunque en experimentos reales, no se han obtenido buenos resultados. El problema cientı́fico que aborda este trabajo es que, a pesar de las ventajas que tiene el control por modo deslizante frente a plantas complejas y no lineales, el fenómeno del chattering limita su aplicación en plataformas actuadas por sistemas neumáticos. Para dar solución al problema cientı́fico planteado anteriormente, se asume como hipótesis que, la técnica de control por modo deslizante basada en proxy, aplicada a sistemas neumáticos, no presenta el fenómeno del chattering y mantiene sus bondades de robustez frente a parámetros altamente no lineales.. 1.2.. Objetivos y resultados. El objetivo general de este trabajo es proponer la elaboración de un método de sı́ntesis del control por modo deslizante basado en proxy, para el posicionamiento continuo de actuadores electro-neumáticos en una plataforma de tres grados de libertad. Como objetivos especı́ficos se definen Evaluar crı́ticamente la técnicas de control por modo deslizante y las diferentes variantes de solución de la problemática del chattering reportadas en la literatura especializada. Establecer los pasos para el diseño y puesta a punto de la estrategia de control por modo deslizante basada en proxy. 2.
(15) Capı́tulo 1: Introducción Analizar el desempeño del algoritmo de control propuesto, tanto en simulación como en pruebas experimentales. Finalmente, los resultados obtenidos son los siguientes: Con este trabajo de investigación se abre un nuevo campo en el desarrollo de algoritmos de control no convencionales para el GARP. Con ello se pretende incrementar las alternativas en el campo del control para mejorar el desempeño de robots paralelos actuados por sistemas neumáticos. La investigación se enfoca en la aplicación de una variante de control por modo deslizante que permite resolver el problema del chattering y garantiza un buen desempeño a pesar de los problemas intrı́nsecos de actuadores neumáticos. Además, se establecen los pasos metodológicos que permite su exitosa práctica.. 1.3.. Estructura del informe. El informe contiene esta introducción, tres capı́tulos, conclusiones, recomendaciones y referencias bibliográficas. A continuación se resume los aspectos tratados en los tres capı́tulos de contenido: Capı́tulo 2: Se realiza un análisis bibliográfico relacionado con la temática del control por modo deslizante, (SMC por sus siglas en inglés). Se especifican los pasos para el diseño de un SMC. Se describen los diferentes conceptos relacionados con la temática en cuestión, con el objetivo de clarificar la problemática a resolver. Se hace énfasis en la descripción de las diferentes variantes de solución del chattering y finalmente se arriban a consideraciones parciales. Capı́tulo 3: Este capı́tulo se dedica al modelado de sistemas neumáticos y se detallan los principales elementos que define el comportamiento altamente no lineal de los mismos. Se hace una descripción de la plataforma de 3 GDL con todo el sistema sensorial disponible para llevar a cabo los experimentos. Capı́tulo 4: En este capı́tulo se establecen los pasos para la implementación del control por modo deslizante basado en proxy hasta llegar al diagrama de bloques 3.
(16) Capı́tulo 1: Introducción correspondiente. Se analizan los resultados por simulación y experimentalmente realizados y se compara el desempeño del robot paralelo con el PSMC frente al SMC y PID.. 4.
(17) Capı́tulo 2 Robótica paralela y Control en Modo Deslizante 2.1.. Caracterı́sticas de los robots paralelos. Los robot paralelos son también conocidos como máquinas cinemáticas paralelas o simplemente manipuladores paralelos (Merlet, 2006). Conceptualmente son aquellos cuya estructura mecánica, que une la base fija con el elemento terminal, está compuesta por múltiples e independientes cadenas cinemáticas cerradas, donde al menos una es actuada. Estos robots poseen mayor fortaleza estructural dado que el elemento terminal se soporta en varios puntos, además, las propias extremidades del robot suelen efectuar a la misma vez la función de sostén estructural y de actuadores. Es por ello, que su estudio implica disı́miles desafı́os, tales como: espacio de trabajo reducido. Enfrentar varios tipos de singularidades (Hesselbach et al., 2005), solucionar los complejos los modelos cinemático y dinámico (Gogu, 2010), exigencias relativas al control y simulación (Li et al., 2009). A su vez en la misma medida que aumenta el número de grados de libertad del robot resulta más complejo su análisis y diseño, dado que una pequeña modificación articular puede cambiar notablemente la movilidad de todo el mecanismo. La topologı́a o arquitectura de un mecanismo paralelo se establece como las articulaciones, conexiones, acoplamientos y actuadores que están estructurados para lograr un determinado movimiento. Existen innumerables configuraciones estructurales para los robots paralelos. Las combinaciones de número de cadenas cinemáticas, tipo de las mismas y restricciones en el movimiento de las articulaciones hacen prácticamente 5.
(18) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante imposible un análisis generalizado de las estructuras de los robots paralelos. El investigador francés Jean Pierre Merlet ha sido el autor que más profundamente ha estudiado dichas configuraciones. En principio, y según el tipo de movimientos que son capaces de realizar, se pueden distinguir dos grupos: los robots planares y los espaciales (Merlet, 2006).. 2.1.1.. Robots planares. Los mecanismos planares son aquellos en los que su movimiento se reduce al plano por lo que pueden tener de 2 a 3 grados de libertad, correspondientes a dos traslaciones en el plano y una rotación sobre un eje perpendicular a dicho plano. Estos mecanismos presentan tres cadenas cinemáticas independientes que se encuentran unidas a la plataforma móvil y a la tierra mediante tres puntos; por consiguiente se pueden considerar de manera general como plataformas móviles triangulares. Los mecanismos planares paralelos se caracterizan por tener tres cadenas cinemáticas conectadas con articulaciones pasivas y una activa. Las cadenas se pueden representar con las sucesiones siguientes: RRR, RP R, RRP, RP P, P RR, P P R, P RP, P P P (Merlet, 2006). A continuación se muestran algunos ejemplos de robots paralelos planares 2.1.. Figura 2.1: Ejemplo de robots planares de dos grados de libertad.. Es notable que con simples cambios en la base y la plataforma móvil los robots de tipo RRP se vuelvan equivalentes a los PRR, y los RPP equivalentes a los PRP. No se especifica cual de las articulaciones es la actuada, ya que puede ser cualquiera de las tres. Se debe evitar colocar el actuador delante del efector final para aligerar el peso de los movimientos del mecanismo. También es posible la construcción de robots con cadenas cinemáticas distintas a estas (Merlet, 2006). En los últimos años se han desarrollado trabajos con diversas aplicaciones relacionados con el diseño, construcción 6.
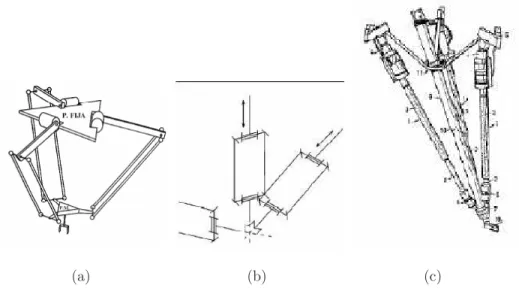
(19) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante y control de mecanismos planares paralelos.. Figura 2.2: Ejemplos de diferentes tipos de manipuladores planos con actuadores. prismáticas y rotacionales.. 2.1.2.. Robots espaciales. Los robots espaciales son aquellos que experimentan su movimiento en todo el espacio tridimensional y no en un plano, es decir; se pueden trasladar (posición en el espacio) y girar (orientación en el espacio) en los tres ejes de coordenadas; esto le confiere 3, 4, 5 y hasta 6 grados de libertad, aunque existen algunos casos particulares que solo poseen dos grados de libertad. Los robots paralelos, especialmente en los últimos años, han presentando un incremento en el número de grados de libertad usados para las distintas aplicaciones. Las mismas han ido en aumento, por ello, abordar todas las configuraciones existentes que respondan a las necesidades. Hoy dı́a, para los nuevos mecanismos, la tarea fundamental recae en el diseño estructural. En la figura 2.3 se muestra algunos tipos de estructuras espaciales. Los manipuladores que realizan rotaciones alrededor de un centro, son ampliamente usados en la vida diaria. Esta arquitectura generalmente se aplica en simuladores de vuelo y de conducción (Merlet, 2006).. 7.
(20) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. (a). (b). (c). Figura 2.3: Robots paralelos espaciales.. 2.1.3.. Campo de aplicación de los robots paralelos. El número de aplicaciones en que las estructuras paralelas han jugado un papel protagónico ha aumentado hasta nuestros dı́as. Se hace mención a algunos campos donde más son aplicados; el énfasis fundamental recae en los mecanismos aplicados a simuladores de conducción. La exactitud que es posible lograr con los robots paralelos en el posicionamiento del elemento final es utilizada en el campo de la medicina, presentado en la figura 2.4, especı́ficamente en la cirugı́a (oftalmologı́a y neurocirugı́a), para lograr suturas precisas. Ésta caracterı́stica también es aprovechada en la industria de componentes electrónicos debido a la necesidad de una alta precisión en la soldadura por puntos de los componentes electrónicos. El propósito inicial de estas estructuras fue la simulación de dispositivos aéreos. Hoy dı́a muchas compañı́as construyen simuladores de realidad virtual para el entrenamiento de personal en la conducción de automóviles, aviones, trenes, naves espaciales, y también como vı́a de entretenimiento; donde se puede afirmar que las estructuras paralelas han sido las más exitosas. En la Figura 2.5 se muestra varios tipos de plataformas diseñadas como simuladores de vuelos. Los simuladores de conducción, además de ser usados para la capacitación y entre8.
(21) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. Figura 2.4: Robot paralelo en aplicaciones médicas.. Figura 2.5: Ejemplos de simuladores de vuelo.. namiento de potenciales conductores de vehı́culos, tienen una aplicación muy cercana y creciente en juegos y entretenimientos. Estos van teniendo mayor aceptación a nivel mundial en la medida de que logran recrear con mayor precisión y exactitud la inmersión en un mundo virtual y los más complejos recrean incluso las sensaciones de movimiento con plataformas móviles de varios GDL. Dichas plataformas permiten el entrenamiento del personal y se minimiza ası́ el uso de vehı́culos reales, con el consiguiente ahorro de recursos. Además evitan posibles accidentes de los principiantes en condiciones de peligrosidad, ya que el ordenador permite reproducir condiciones extremas de conducción en un ambiente virtual, seguro y totalmente controlado.. 9.
(22) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. 2.2.. Actuadores neumáticos. A los mecanismos que convierten la energı́a del aire comprimido en trabajo mecánico se les denomina actuadores neumáticos. La energı́a neumática que emplea aire comprimido como fuente de potencia tiene cualidades excelentes, propias del elemento de base (Rubio et al., 2009a; Krejnin and Krivts, 2006), entre estas cualidades podemos destacar: El aire es abundante y barato. Se transporta y almacena fácilmente. Es limpio (no produce contaminación) y carece de peligro de combustión o alteración con la temperatura No obstante estas ventajas, es digno destacar que, siendo el aire un fluido compresible, presenta algunas desventajas, como pueden ser los movimientos no uniformes de los pistones cuando se realizan avances lentos con carga aplicada. Los actuadores electro-neumáticos están formados por un cilindro neumático, al cual se le debe acoplar directamente la carga, y una o varias válvulas electro-neumáticas conectadas a las cámaras del cilindro. La generación de aire comprimido se lleva a cabo, por lo general, cuando se admite aire exterior en un recinto hermético donde se le reduce el volumen hasta alcanzar la presión deseada. La presión de distribución generalmente se mantiene entre 5 y 10 bar para las aplicaciones industriales más comunes. En el proceso de uso de aire comprimido existe una transformación de energı́a eléctrica en mecánica, cuando por medio de un motor eléctrico se hace girar el eje del compresor. El giro mecánico del compresor produce la absorción, compresión y almacenamiento de aire, y por último el aire presurizado, a través de las válvulas, genera el movimiento de los actuadores lineales . En la actualidad el desarrollo de la neumática tiene diversas áreas de investigación enfocada en la mejora del desempeño:. 10.
(23) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante Desarrollo de actuadores que la fricción sea reducida y a la vez de gran versatilidad. Optimización de los componentes que conforman el sistema neumático con especial énfasis en la reducción de tamaño de los diferentes elementos que lo conforman (válvulas y actuadores) Desarrollo de algoritmos y unidades de control que permita, a partir de una pequeña señal de mando, la generación de alta potencia en las señales del sistema. Integración de los sistemas de control empotrados y los sensores en servo-sistemas inteligentes.. 2.3.. Control desacoplado. El control de los robots paralelos es todavı́a un campo abierto. A pesar de que el control de estos ha sido estudiado en numerosos trabajos, la dificultad es tal, que aún queda mucho por hacer. Para reducir el efecto de las perturbaciones externas y que la señal de control sea robusta frente a errores de modelado, el controlador debe considerar términos de realimentación de posición, velocidad y aceleración del elemento terminal. La dificultad de realizar el control proviene del hecho de que el robot objeto de estudio es un sistema multi-cuerpo, no lineal, acoplado y con parámetros inerciales variables en el tiempo, esto principalmente se debe a variaciones de la carga soportada. En muchas aplicaciones no es siempre aceptable la suposición de que la arquitectura del robot se puede asumir como una serie de eslabones dinámicamente desacoplados. Al considerar la inevitable presencia de interacciones dinámicas entre los actuadores, se recurre a estrategias para controlar el sistema a pesar de los efectos indeseables sobre el lazo de dichas perturbaciones. El control desacoplado articular es empleado con eficacia en robots paralelos altamente acoplados de hasta seis grados de libertad, donde resultados reportados en la literatura demuestran mejoras del desempeño del robot en aplicaciones de control de 11.
(24) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante trayectoria, basado en el modelo dinámico de los actuadores del robot (Ogbobe et al., 2010; Yang et al., 2011). Los procedimientos de desacople dinámico imponen restricciones a la geometrı́a y limitaciones en la capacidad de carga del robot (Chen and McInroy, 2004), donde se hace preferible considerar la existencia real de las interacciones dinámicas y diseñar un controlador acompañado de un proceso de análisis de robustez como vı́a para eliminar o reducir los efectos indeseables del acople dinámico para la aplicación en cuestión. En este contexto, el empleo del modelo dinámico de actuadores neumáticos basado en identificación experimental, provee resultados destacados en el posicionamiento continuo del robot SIMPRO con el uso de un controlador desacoplado articular (Izaguirre et al., 2011), corroborado con pruebas experimentales (Rubio et al., 2009b). En el caso de aplicaciones con actuadores neumáticos, se deben enfrentar las consecuencias de la no linealidad que provoca movimientos no uniformes de los pistones cuando se realizan avances lentos con carga aplicada y a los efectos indeseables debido a la compresibilidad del aire en las cámaras del pistón. En este ámbito, existen trabajos previos relacionados con identificación, modelado y control desacoplado de actuadores neumáticos, con resultados satisfactorios en plataforma neumática de dos grados de libertad de aplicación industrial (Rubio et al., 2007, 2009a). Por consiguiente, el diseño de un controlador desacoplado articular debe enfocarse no solo a cumplir con los ı́ndices de desempeño del sistema. Entre las estrategias de control más referenciadas en la literatura para sistemas altamente no lineales bajo condiciones de incertidumbre sobresale el Control en Modo Deslizante(SMC). Para el posicionamiento de sistemas neumáticos los sistemas basados en modo deslizante proveen robustez y precisión (Krejnin and Krivts, 2006). Los sistemas con modos deslizantes tienen capacidad para ser una herramienta eficiente para el control complejo de alto orden de plantas dinámicas no lineales que operan bajo condiciones inciertas, un problema común para muchos procesos de tecnologı́a moderna. Esto explica el alto nivel de la actividad de investigación y publicación en el área y el interés de prácticas de ingenieros en el control de modo deslizante durante las últimas dos décadas (Utkin et al., 1999).. 12.
(25) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. 2.4.. Control en Modo Deslizante. Las caracterı́sticas no lineales de los sistemas mecánicos pueden introducir efectos negativos en la operación de la planta. El control en modo deslizante se caracteriza por su robustez frente a los efectos no lineales. Esta sección muestra los conceptos más importantes del Control en Modo Deslizante(SMC). El propósito de la ley de control en modo deslizante radica en conducir un sistema no lineal a un estado deseado dentro de una superficie especı́fica representada en el plano-fase y mantener el estado de la planta en esa superficie por todo el tiempo subsiguiente. La superficie es conocida como superficie deslizante (Utkin et al., 1999). De ahı́ se desprende el concepto de control de estructura variable (VSC) ya que el sistema es gobernado mediante la conmutación. En otras palabras, si el sistema se encuentra encima o debajo de la superficie deslizante el algoritmo de control conmuta con el objetivo de mantener a la dinámica del sistema en la vecindad de dicha superficie. Cuando el estado del sistema está sobre la superficie, el esquema de control tiene una ganancia determinada y si el sistema no se encuentra sobre la superficie la ganancia tendrá un valor diferente. Idealmente, una vez interceptada la superficie, el control en modo deslizante mantiene el estado de la planta en la superficie para todo el tiempo subsiguiente. Por tanto los esfuerzos deben centrarse en diseñar un control en modo deslizante que conduzca a la planta a la superficie deslizante y la mantenga sobre la misma. La dinámica de un sistema puede expresarse como: y n = b(y, t)[f (y, t) + U(t) + d(t)]. (2.1). donde y n es la derivada de orden n del estado y y U(t) es la entrada de control. Por su parte f (y, t) y b(y, t) son generalmente funciones dependientes del estado y del tiempo. La función f (y, t) agrupa los términos no lineales y que son complejos de modelar y b(y, t) está integrada por parámetros del modelo del sistema que son poco conocidos. El término d(t) agrupa las perturbaciones que afectan al sistema. El problema de control consiste en que el estado del sistema (y) siga un estado 13.
(26) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante especı́fico y variable en el tiempo (yd (t)) independientemente de las imprecisiones y no linealidades del modelo (b(y, t), f (y, t)) y a las afectaciones provocadas por las perturbaciones (d(t)). La ecuación 2.2 define matemáticamente la estructura de la superficie deslizante s(y, t). s(y, t) = (. d + λ)n−1 y dt. (2.2). donde λ es una constante positiva que se selecciona a partir del desempeño del sistema en cuanto a velocidad de respuesta se refiere y e = yd (t) − y(t) es el error de la salida del sistema, siendo yd (t) el estado deseado. Para aquellos sistemas con representación dinámica de segundo orden, es posible reducir la ecuación 2.3 que define la superficie a una función de primer orden.. s(y, t) = ẏ + λy. (2.3). Cuando el sistema se encuentra sobre la superficie deslizante el valor que toma la función s(y, t) = 0 de forma que la ecuación 2.4:. ẏ = −λy. (2.4). La solución de la ecuación es:. 1. y = y1,0 e− λ t. (2.5). De esta manera, la superficie deslizante constituye una lı́nea recta de pendiente λ por lo que el comportamiento del sistema, una vez alcanzada la superficie deslizante, será similar al de un sistema de primer orden. Además de que el tiempo en que el sistema alcance la superficie deslizante es equivalente a. 1 λ. de allı́ se deduce que la rapidez del. sistema depende de la pendiente λ. La ley de control a diseñar tiene como propósito lograr que el sistema sea estable lo que se consigue asegurando la convergencia de s(y, t) a cero. Para lograr este objetivo 14.
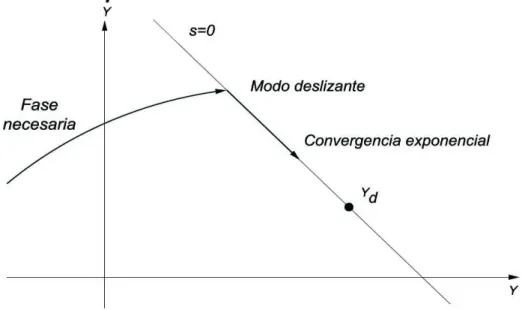
(27) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante se aplica el criterio de estabilidad de Lyapunov. El método de estabilidad de Lyapunov es usualmente utilizado para determinar las propiedades de estabilidad de un punto de equilibrio sin solucionar la ecuación de estado. Se parte de considerar a V (y) como una función escalar diferenciable definida en un dominio D que contiene el origen. El método de Lyapunov plantea que la función V (y) es definida positiva si V (0) = 0 y V (y) > 0 para todo valor de y. V (y) es definida negativa si V (0) = 0 y V (y) < 0 para todo valor de y. En este caso se selecciona la función V = 21 s2 debido a que es definida positiva y su derivada es definida negativa. Si se deriva la función candidata con respecto a la superficie deslizante s(y, t) definida en la ecuación 2.3 es posible obtener una expresión para la ley de control que se debe diseñar, asegurándose la estabilidad del sistema . sṡ ≤ −F |s|. (2.6). donde F representa una constante positiva. De esta manera se asegura que las trayectorias en un plano fase apunten hacia la superficie s(y, t), y una vez dentro de la superficie, las trayectorias del sistema permanezcan sobre la misma, tal como se muestra en la figura 2.6. Adicionalmente, esto implica que algunas perturbaciones o incertidumbres dinámicas puedan ser toleradas siempre y cuando la superficie no sufra variación.. Figura 2.6: Efecto del control en modo deslizante sobre la trayectoria de un sistema de. segundo orden representado en espacio estado. En resumen, la idea es utilizar una función conocida para s(y, t) acorde a 2.3, y 15.
(28) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante entonces seleccionar la ley de control U(t) en 2.1 de manera tal que el sistema en lazo cerrado mantenga el comportamiento definido por la superficie deslizante seleccionada, a pesar de la presencia de imprecisiones que contenga el modelo y el efecto de las perturbaciones.. 2.5.. Diseño del controlador. La señal de mando U(t) del control en modo deslizante está integrada por dos partes: U(t) = Uc (t) + Ud (t). (2.7). Uc (t): Mando compensado, tiene como función cancelar las no linealidades y los parámetros con incertidumbres del modelo. Ud (t): Mando discontinuo, asegura la robustez del sistema. La ley de control Uc (t) se implementa para cumplir con la condición deslizante expresada por la ecuación 2.10. El término discontinuo Ud (t) se justifica debido a que la implementación de la conmutación de control es imperfecta, lo que conduce al chattering. El chattering es indeseable en la práctica puesto que provoca una alta acción de control que estará afectada por términos dinámicos de alta frecuencia que no se hayan tenido en cuenta en el modelado. De acuerdo con la estructura de la ecuación 2.1 la dinámica de un sistema de segundo orden puede expresarse como (Slotine and Li, 1991): ÿ = b(y, t)[f (y, t) + U(t) + d(t)]. (2.8). Como se define anteriormente, el término f (y, t) es no lineal y variable en el tiempo y una vez estimado a partir del modelo se puede expresar como fˆ(y, t). El error que se produce debido a la estimación de f (y, t) está dado por: ˆ t) − f (y, t) ≤ G(y, t) f(y, siendo G(y, t) una función conocida. 16.
(29) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante Por su parte el término b(y, t) puede variar dentro de un rango determinado por: 0 ≤ bmı́n (y, t) ≤ b(y, t) ≤ bmáy (y, t) De ahı́ que b(y, t) puede ser estimado con un nivel de exactitud razonable utilizando solo los valores mı́nimos y máximos del mismo. b̂(y, t) =. q. bmı́n (y, t)bmáy (y, t). La derivada de la superficie deslizante definida por la ecuación 2.3 en función del error está dada por: ṡ(t) = (ÿd (t) − ÿ(t)) + λ(ẏd − ẏ). (2.9). Al sustituir la ecuación 2.9 en la ecuación ??, y teniendo en consideración que ÿd (t) = ẏd (t) = 0, se llega a la siguiente expresión: sgn(s){ÿ + λẏ} ≥ F Teniendo en cuenta que la ecuación 2.8 define la dinámica de un sistema de segundo orden, es posible reescribir la expresión anterior a partir de los términos estimados que definen a ÿ como: sgn(s){b(y, t)[f (y, t) + U(t) + d(t)] + λẏ} ≥ F. (2.10). Esta expresión constituye la condición deslizante que debe cumplirse para asegurar el desempeño adecuado del sistema. La ecuación para el mando compensado de un control deslizante, encargado de cancelar las no linealidades e incertidumbres de un sistema de segundo orden, se obtiene a partir de la ecuación 2.8 y se define como:. Uc (t) = b̂(y, t)−1[−d(t)b̂(y, t) − fˆ(y, t)b̂(y, t) − λẏ]. (2.11). Para asegurar que la condición deslizante, expresada por la ecuación 2.10, se cumpla en todo momento es necesario implementar una ley de control que cumpla con la siguiente estructura: 17.
(30) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. U(t) = Uc (t) + k(y, t)sgn(s). (2.12). donde k(y, t) se selecciona tal que: k(y, t) = G(y, t) + F siendo G(y, t) una función conocida. Por su parte el término discontinuo sgn(s) se define como:. u(t). . sgn(s) = 1. para y > 0. sgn(s) = −1. para y < 0. de tal forma que un esquema de control en modo deslizante puede ser aproximado al presentado en la figura 2.7. Figura 2.7: Diagrama a bloques de un lazo de control ideal en modos deslizantes. Un con-. trolador discontinuo obliga a la señal de salida y(t) de la planta que siga a la trayectoria de referencia xd(t). La ley de control expresada por la ecuación 2.12 asegura que la trayectoria del sistema alcance en un tiempo finito la superficie deslizante s(t), asegurando que los errores tiendan exponencialmente a cero. El procedimiento para arribar a la expresión de la ley de control no ha sido muy complejo debido a que la superficie deslizante seleccionada es de primer orden. Para superficies de mayor orden la complejidad aumenta considerablemente.. 18.
(31) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. 2.6.. Robustez del control en modo deslizante. La puesta a punto del control en modo deslizante se basa en la estimación de parámetros pertenecientes al modelo matemático del sistema. Sin embargo los parámetros estimados nunca van a corresponder a los modelos propios de la planta real. Dado un sistema de segundo orden cuyas ecuaciones en el espacio estado se representan del siguiente modo:. ẏ = v. (2.13). v̇ = f (y) + g(y)u. (2.14). f (y) y g(y) son funciones no lineales continuas. y: Posición (m) v: Velocidad (m/s) u Acción de mando procedente del SMC. Basados en los epı́grafes 2.4 y 2.5 se puede obtener que la superficie deslizante s, su derivada ṡ y la ley de control son equivalentes a:. donde:. s(y, t) = e1 + λe2. (2.15). ṡ(y, t) = e2 + λ(y2d ˙ − f (y) + g(y)u). (2.16). 1 e2 u = d (y2d ˙ − fd (y) + F sgn(s)) λ g(y). e = e1 = y1d − y ė = e2 = y2d − ẏ 19. (2.17).
(32) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante al sustituir 2.17 en 2.16 se tiene:. g(y) e2 ṡ(y, t) = e2 + λ(y2d ˙ − f (y) + d (y2d ˙ − fd (y) + F sgn(s)) λ g(y) g(y) g(y) g(y) e2 g(y) = e2 + λ(y2d ˙ − f (y) + d y2d ˙ − d fd (y) + d + d F sgn(s)) g(y) g(y) g(y) λ g(y) g(y) = ∆e2 + λ∆y2d ˙ + λ∆f (y) − λ d F sgn(s)) g(y) donde ∆e2 = e2 − g(y) e2 , ∆y2d ˙ = y2d ˙ (1 − g(y) ) y ∆f (y) = g(y) fd (y) − f (y). Asumiendo gd (y) gd (y) gd (y) d λ, y F son positivas. que g(y), g(y), g(y) λ d F > ∆e2 + λ∆y2d ˙ + λ∆f (y) g(y). (2.18). de esta forma ṡ(y, t) siempre presenta signo opuesto con respecto a s(y, t). Al obedecer el teorema de Liapunov la dinámica del sistema converge hacia la superficie deslizante. Si la ganancia de robustez del algoritmo de control es lo suficientemente alta las incertidumbres de los parámetros se hacen despreciables y el sistema presenta un comportamiento deseable. De esta forma el SMC constituye una estrategia de control robusta ante incertidumbres en los parámetros del modelo, lo cual representa su principal ventaja (Slotine and Li, 1991; Damme, 2009).. 2.7.. Chattering. En sistemas con discontinuidades, la solución de la ecuación de movimiento depende de pequeñas constantes de tiempo que presentan los componentes rápidos. Pero a diferencia de los sistemas de control continuo, un controlador discontinuo excita la dinámica no prevista en el modelo, obteniendo por resultado oscilaciones en el vector de estado. Este problema se conoce como chattering en la literatura de control. Estas oscilaciones dan por resultado una baja precisión en el control, alta disipación de potencia en los circuitos conmutadores y desgaste en los componentes mecánicos. 20.
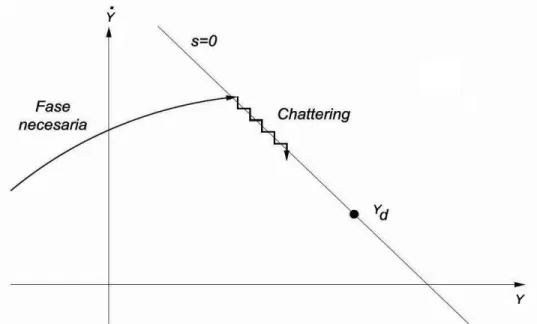
(33) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante El término chattering describe las señales oscilantes de frecuencia y amplitud finita que aparecen en las implementaciones en modos deslizantes producto a la rápida conmutación del controlador en modo deslizante donde se resaltan las caracterı́sticas dinámicas sin modelar del lazo de control. En la figura 2.8 se muestra la representación de la trayectoria de un sistema afectado por el fenómeno del chattering. Afortunadamente, la prevención del chattering usualmente no requiere un modelo detallado de todos los componentes. Sin embargo, primeramente debe diseñarse un controlador en modos deslizantes bajo suposiciones ideales. En un segundo paso de diseño, es posible prevenir el chattering mediante algunos de los métodos a considerar. Resolver el problema del chattering es importante cuando se busca explotar al máximo los beneficios de los modos deslizantes en el control de sistemas reales. Sin un manejo adecuado del chattering en el proceso de diseño, puede llegar el mayor obstáculo en la implementación (Utkin et al., 1999). El chattering es indeseable y debe ser eliminado por el controlador si se quiere que el sistema mantenga un desempeño adecuado. En la literatura (Slotine and Li, 1991) se reporta una solución que permite eliminar los efectos negativos que provoca el chattering en los sistemas donde se aplica el control en modo deslizante.. Figura 2.8: Representación del efecto chattering resultado de la acción del control. deslizante. 21.
(34) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante La solución propuesta por estos autores consiste en reemplazar el término discontinuo sgn(s) por una función de saturación definida por:. u(t). . s , φ. para. |s| ≤ 1. sgn(s). para. |s| > 1. donde φ representa una constante positiva. La ley de control se reemplaza mediante una función de saturación la cual se aproxima al término sgn(s) en un lı́mite de la región s(t) = 0. Numerosos tipos de funciones de saturación se han propuesto en la literatura. El esquema se muestra en la figura 2.9. Figura 2.9: Función de saturación reemplazada para el controlador discontinuo. En lugar de que operen los modos deslizantes en forma ideal, las trayectorias del sistema son confinadas a la región interna de s(t) = 0.. Es importante recalcar que esta metodologı́a es muy sensible a dinámicas del sistema no modeladas y que en la mayorı́a de los casos puede conducir a un desempeño inaceptable. Otro método citado es el llamado fracción aproximada (Bartoszewicz and NowackaLeverton, 2009) donde se establece una aproximación a la superficie deslizante que es definida como:. aprox(s) =. s ρ + |s|. (2.19). El fenómeno ha sido ampliamente analizado en muchos artı́culos y se han propuesto variantes con el objetivo de eliminar su efecto. En próximos epı́grafes se abordan las principales variantes que han sido estudiadas. 22.
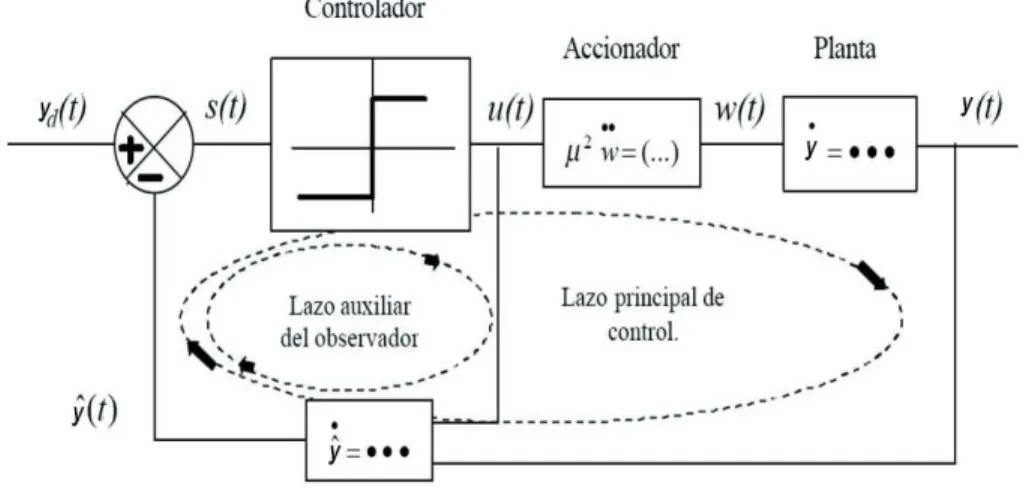
(35) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. 2.7.1.. Observadores en Modo Deslizante. Otro de los métodos creados para lograr la atenuación del chattering se basa en el diseño de un observador deslizante (Utkin et al., 1999). En este caso, se tiene en cuenta los fenómenos de alta frecuencia en el lazo de retroalimentación cerrando el mismo a través de un observador de la planta. Un observador asintótico en el lazo de control puede eliminar el problema del chattering a pesar de las leyes de control discontinuo. La idea clave es la de generar los modos deslizantes ideales en un lazo auxiliar para el observador en lugar del principal lazo de control. Los modos deslizantes ideales son factibles en el lazo del observador debido a que son enteramente generados en el software de control y por lo tanto, este no contiene alguna dinámica sin considerar (Utkin et al., 1999). El lazo principal sigue la dinámica del lazo del observador. A pesar de aplicar una señal de control discontinua con una acción conmutativa sobre la planta, los fenómenos del chattering no aparecen y el sistema se comporta como si un control equivalente continuo fuese aplicado. La figura 2.10 muestra un diagrama a bloques del sistema utilizado en este capı́tulo junto con el observador auxiliar.. Figura 2.10: Lazo de control con lazo auxiliar del observador.. Modos deslizantes ideales aparecen en la región de ŝ(t) = 0, debido a que el lazo del observador, está libre de dinámicas sin modelar. La señal de salida de la planta y(t) sigue a la salida del observador yd (t) sin chattering a pesar de que el controlador u(t) opera en modo discontinuo aplicado al lazo principal junto con la dinámica del 23.
(36) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante actuador. Al definir un observador de primer orden:. ˙ ŷ(t) = ax(t) + bu(t) + Lȳ(t). (2.20). Donde L representa la ganancia de retroalimentación lineal para el error observado ȳ(t) = y(t) − ŷ(t) con tendencia hacia el valor cero. El conocimiento de los parámetros b y a son supuestos. En el caso en que exista incertidumbre paramétrica se sustituye estos valores por estimadores â y b̂, ello representa la realización de un análisis más complejo.. 2.7.2.. Alto Orden en Modo Deslizante(HOSMC). Con el objetivo de atenuar el chattering se han propuestos muchos métodos a partir de la base de cambiar la dinámica alrededor de la vecindad de la superficie, eliminar el elemento discontinuo y al mismo tiempo preservar las principales caracterı́sticas del sistema. Sin embargo a veces precisión y robustez son parcialmente perdidos. El Alto Orden en Modo Deslizante es una generalización de las ideas básicas del modo deslizante. Esta vez se hace énfasis sobre las derivadas n-ésimas del sistema haciendo la convergencia total hacia la superficie deslizante en lugar de solo influir sobre la primera derivada. Esto no solo mantiene las principales ventajas sino que también, al mismo tiempo, son removidas las altas frecuencias de la señal de mando además de proveer una alta precisión en su desempeño (Laghrouche et al., 2006; Pisano, 2000). Definición 1 El orden deslizante r es el número continuo de total de derivadas que desaparecen en la superficie deslizante. Si alguna función (señal) converge a un valor constante entonces sus derivadas convergen a cero. Sobre la base de lo planteado y dado el hecho de que la función deslizante converge a un valor constante, en este caso cero, entonces puede ser planteado de que HOSMC, siglas en inglés, procedente del High Order Sliding Mode Control, se caracteriza por el hecho de que sus derivadas convergen a cero en determinado orden del sistema. Esta propiedad puede ser formulada introduciendo un nuevo tipo de superficie llamado conjunto de superficies en lo cual se basa dicha estrategia (Levant, 2008). 24.
(37) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante Definición 2 (Conjunto Deslizante) El conjunto deslizante asociado a la superficie s(y, t) = 0 es definido por las siguientes igualdades. s(·) = ṡ(·) = ·· = sr−1 = 0. (2.21). La ecuación 2.21 representa la condición de estado para la dinámica del sistema donde se establece la reducción en el orden r − 1. Teniendo en cuenta lo ocurrido para el 1er orden en modo deslizante, que reduce en un grado el orden del sistema, en este caso puede ser reducido el orden completo del sistema. Esto significa que si un sistema presenta 4to orden puede ser reducido directamente a un sistema de primer orden. Los sistemas nombrados r th orden deslizante a menudo son nombrados r th deslizante. La ley de control, mostrada de manera general en la ecuación 2.22, depende del orden presente en la dinámica del sistema de grado r th . Como se puede observar existe una dependencia no solo de las consiguientes derivadas del sistema sino del parámetro β.. u = F sgn(βr , s, ṡ, ..., sr−1 ). (2.22). El valor de βr puede ser ajustado por el usuario. La magnitud de esta variable debe ser alta con el objetivo de garantizar la convergencia en un tiempo finito de todas las derivadas. A continuación se muestra las leyes de control para 1er -deslizante y 2do -deslizante 1. u = F sgn(s) 1 2 sgn(s) 1 |ṡ|+β|s| 2. 2. u = F sgn( ṡ+β|s|. ). A partir de la idea planteada en el método de fracción aproximada se propone para el caso de 2do -deslizante una modificación con el objetivo de reducir el chattering. En este caso se añade un término ν al denominador (Pukdeboon et al., 2010). Entonces la ley se muestra en la ecuación 2.23: 25.
(38) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. 1. u = F sgn(. ṡ + β|s| 2 sgn(s) 1. |ṡ| + β|s| 2 + ν. ). (2.23). además se sustituye el sgn(·) por una función de sat(·). La figura 2.11 muestra la convergencia para un 2do -deslizante. Es claro que, tanto el valor de superficie como de sus correspondientes derivadas, presentan una tendencia exponencial hacia cero. De esta forma no solo se garantizan que la función correspondiente s(y, t) se mantenga sobre la superficie deslizante sino la total anulación de todas las derivadas permitiendo la atenuación del chattering.. Figura 2.11: Convergencia para un sistema de Segundo Orden en Modo Deslizante.. 2.7.3.. Modo Deslizante basado en Fuzzy(FSMC). La esencia del control fuzzy, o borroso, radica en las reglas lingüı́sticas establecidas, basados en un procedimiento de toma de decisión. Las reglas borrosas son establecidas por ensayo y error usando el concepto de simetrı́a. La teorı́a borrosa se emplea para simular el razonamiento de la lógica de seres humanos. Las técnicas borrosas están compuestas por variables de entradas y salidas. A partir de las leyes de inferencia son clasificados los valores de las variables en el rango 0 − 1, esto es llevado a cabo 26.
(39) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante por los fuzzificadores. De acuerdo al valor borroso intervienen los desfuzzificadores que convierten ese valor en acción de mando sobre el actuador. Las funciones de membresı́as fundamentales son las siguientes: Funciones lineales (Triangular y trapezoidal) Cuadráticas Gaussiana Otras funciones especiales Sin embargo, las funciones lineales son las más usadas dentro de los algoritmos borrosos con respecto a otras funciones más complejas. Esto es debido a la simplicidad de dichas funciones, además, las otras funciones demandan un alto costo computacional Reznik (1997). La figura 2.12 muestra las diferentes formas de funciones de membresı́a.. Figura 2.12: Forma tı́pica de funciones de pertenencia: 1-triangular, 2-trapezoidal, 3-. gaussiana, 4-campana generalizada, 5-singleton. Los algoritmos de control borrosos son efectivos para sistemas no lineales. Las caracterı́sticas se basan en reglas usando If y T hen en el cual los algoritmos de control contienen funciones de membresı́as que determinan las reglas de control(Krejnin and Krivts, 2006). 27.
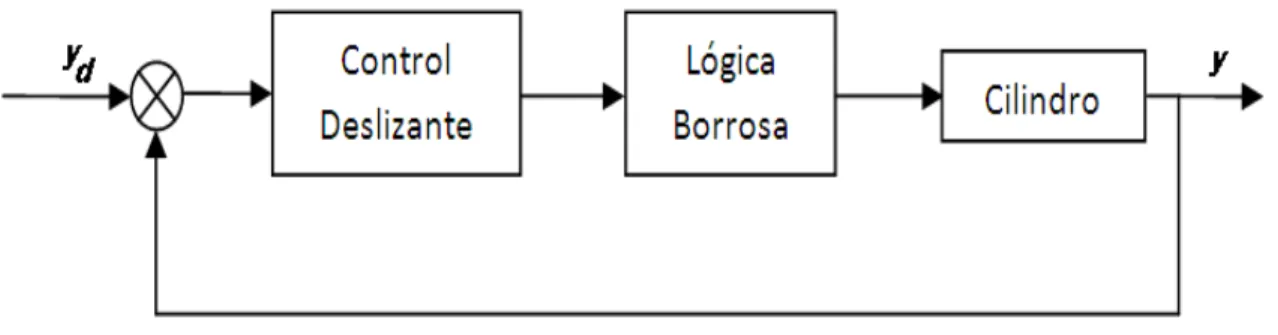
(40) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante Las técnicas borrosas han sido aplicadas al mundo industrializado (proceso y automatización) brindando un buen desempeño. Los resultados de este uso han demostrado que los sistemas borrosas presentan ventajas en comparación con algoritmos PID. Las ventajas principales de sistemas borroso son las siguientes (Sorli et al., 1999): No es necesario construir un modelo matemático detallado. Pueden funcionar con un gran número de la entrada. Pueden ser adaptados fácilmente en sistemas no lineales El conocimiento humano puede ser aplicado fácilmente Las etiquetas lingüı́sticas se describen en el conjunto borroso como negativo grande (NB), negativo mediano (NM ), negativo pequeño (NS ), cero (Z ) positivo grande (PB), positivo mediano (PM ), positivo pequeño (PS ) (Reznik, 1997). La aplicación de técnicas borrosas al control de posición para sistemas neumáticos es ventajosa en términos de simplicidad del diseño y puesta en práctica, además de reducir el tiempo requerido para el desempeño del sistema. La experiencia demuestra que el éxito de técnicas borrosas depende del nivel de conocimiento referente al comportamiento de posicionamiento continuo. Pero a veces no se garantiza la estabilidad y robustez del sistema con el control borroso (Kim and Lee, 1995). Los sistemas borrosos han combinado las técnicas deslizantes con el objetivo de proveer robustez y estabilidad a los controladores borrosos. Esta combinación de los dos principios es lo que es conocido como Fuzzy basado en Modo Deslizante(FSMC) representando este una alternativa para el diseño de algoritmos para sistemas no lineales con incertidumbres (Abid et al., 2008). Es ampliamente explicado a lo largo de los epı́grafes anteriores el problema del chattering en los sistemas basados en técnicas deslizantes de manera que implementando lógica borrosa es atenuado dicho fenómeno. De ahı́ que muchos investigadores hayan desarrollados variantes de deslizante combinado con reglas fuzzy en aras de tomar ventajas de ambos métodos (Lin and Kung, 1992). Muchos de ellos, consisten en establecer reglas borrosas a la superficie deslizante S sustituyendo al término discontinuo presentado por el mismo control deslizante (Dehghani and Shabaninia, 2007). El esquema se presenta en la figura 2.13 28.
(41) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante. Figura 2.13: Diagrama de Fuzzy basado en Modo Deslizante. Se establecen reglas borrosas no solo para la superficie sino también para la ganancia de robustez del control y la acción de mando u donde se tiene en cuenta los valores máximos y mı́nimos. A partir de lo anterior dicho se implementa la secuencia lógica de operación; de acuerdo a los valores correspondientes a las variables de entrada se asignan valores a la acción de mando en base a las declaraciones If y T hen. Los resultados de simulación han mostrado que, con la combinación de ambos algoritmos el efecto del chattering, es significativamente suprimido en comparación con el propio control en modo deslizante.. 2.7.4.. Modo Deslizante basado en Proxy(PSMC). En el caso de un control clásico PID (Proporcional Integral Derivativo), presente en la mayorı́a de los robots industriales actuales, el mecanismo se trata como un sistema lineal y cada una de las articulaciones se controla individualmente con un regulador de tipo PID de ganancias constantes. Las ventajas de este sistema son: la facilidad de implementación y el bajo costo computacional. Las desventajas son: la respuesta temporal del robot varı́a según su configuración, se producen oscilaciones subamortiguadas e imprecisión en los movimientos rápidos. Una de las causas que propicia estas imprecisiones se debe a la acción derivativa ya que la misma contribuye a amplificar los ruidos y por ello se ve comprometido el desempeño del sistema. En la figura ?? se muestra un controlador PID en un esquema de control articular. El controlador PID presenta el algoritmo de control más usado en las aplicaciones industriales. El desempeño de estos controladores es muy bueno si los parámetros de 29.
(42) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante la dinámica de la planta no varı́an en el tiempo. Debido a la compresibilidad del aire, zonas muertas y fuerzas de fricción presentes en los sistemas neumáticos provocan que la dinámica de estos actuadores presenten fuertes caracterı́sticas no lineales que hacen que sus parámetros varı́en en el tiempo. Estas son las principales causas que limitan la aplicación de los PID en estos sistemas (Krejnin and Krivts, 2006). Dadas las deficiencias de estos sistemas (Kikuuwe and Fujimoto, 2006; Kikuuwe et al., 2010), investigadores han desarrollado algoritmos de control PID a partir de combinaciones del mismo con estrategias deslizantes. La idea esencial consiste en forzar el estado del sistema a la superficie deslizante; a partir de ahı́ la ley de control se encuentra en función del controlador lineal de forma que el mismo gobierne la dinámica de la planta. Esto se debe al estado alcanzado por el sistema en la vecindad de la superficie ya que la dinámica puede aproximarse a un sistema lineal. EL concepto de control deslizante basado en proxy difiere un poco de la metodologı́a tradicional que abordan las técnicas en modo deslizante. Todo se basa en la introducción de un objeto virtual llamado proxy, tomado del concepto de haptic. Los objetos virtuales constan de tres componentes fundamentales: el primero consiste en una interfaz haptic o un objeto del tipo electro-mecánico, al cual se le pueda accionar fuerzas controladas. El segundo elemento importante lo constituye el modelo matemático del objeto virtual. El tercer componente aborda el algoritmo de interpretación del objeto que, junto a los otros dos van a conformar un objeto simulado al cual se le puede ejercer fuerzas, llevadas a cabo por el usuario (Zilles and Salisbory, 1995). En este caso el control en modo deslizante ideal ejerce una acción de mando sobre el proxy. El desplazamiento del mismo provoca un movimiento sobre sistema real constituyendo este la referencia del sistema real debido a que existe un acople entre ambos a través de un PID (Kikuuwe and Fujimoto, 2006). El epı́grafe 4.3 aborda con más profundidad la temática en cuestión.. 2.8.. Conclusiones parciales. El fenómeno del chattering es el principal inconveniente para que las técnicas deslizantes sean implementadas con éxito. Actualmente, dados los avances tecnológicos son reali30.
(43) Capı́tulo 2: Robótica paralela y Control en Modo Deslizante zados innumerables investigaciones que permitan la atenuación del fenómeno a través de otras técnicas. De todo lo dicho anteriormente han surgido nuevas metodológicas de control basadas en técnicas deslizantes donde se incorporan las ventajas propias del mismo resolviendo complejos problemas concerniente a no linealidades e incertidumbres. Los algoritmos basados en modos deslizantes constituyen una vı́a muy prometedora para los sistemas neumáticos dadas las ventajas presentadas por los mismos concernientes a las caracterı́sticas dinámicas de los actuadores, relacionada con la robustez ante incertidumbres del modelo. Sin embargo la mayorı́a de las estrategias tales como los observadores, sistemas inteligentes y la sustitución del elemento discontinuo por una saturación han tenido éxito pero solo a nivel de simulación, de acuerdo a la literatura reportada. La estrategia Alto Grado en Modo Deslizante si ha presentado resultados notables en plataformas de pruebas para sistemas neumáticos, pero se requiere el procesamiento de varias derivadas de la variable s(y, t), además, se logra atenuar las vibraciones en la acción de mando pero se ha hace imposible su eliminación. Las estrategias en modo deslizante basadas en proxy y PID han sido reportadas en aplicaciones tales como la robótica médica, donde se han obtenido buenos resultados en experimentos reales observándose una total ausencia del chattering. Debido a la simplicidad del mismo algoritmo y a su amplia utilización el grupo GARP apuesta por los sistemas basados en modo deslizantes combinando los mismos con los sistemas de controles convencionales.. 31.
(44) Capı́tulo 3 Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. En este capı́tulo se describen las caracterı́sticas fundamentales del robot paralelo de 3 GDL donde se destacan los principales movimientos llevados a cabos por el robot en cuestión. Son mencionados los principales elementos que participan en el sistema tanto neumático como sensorial. Por otro lado se hace un análisis detallado concerniente a la dinámica de los actuadores neumáticos estableciéndose los elementos principales que definen las altas no linealidades. Basado en lo ya descrito se plantea el modelado dinámico, correspondiente a los actuadores neumáticos y a la dinámica de la plataforma de tres grados de libertad. Esta vez, se toma como herramienta el software especializado en el modelado de sistemas mecánicos llamado MSC ADAMS.. 3.1.. Plataforma de tres grados de libertad (3 GDL). El simulador de movimiento es fabricado en el Centro de Investigación y Desarrollo de Simuladores -SIMPRO-, empresa de gran prestigio y experiencia en este tipo de producciones, que en conjunto con el grupo de investigaciones GARP de la Universidad Central ”Marta Abreu”de Las Villas ha venido desarrollando investigaciones en el campo del control de tales dispositivos mecánicos. El sistema está conformado por una base fija conectada a una plataforma móvil por tres cadenas cinemáticas cerradas manejadas por cilindros de movimiento lineal de doble efecto basado en la arquitectura RPSU-2SPS. Estos cilindros están alimentados 32.
(45) Capı́tulo 3: Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. por válvulas MPYE 5-3/8-010-B. La lectura de posición y velocidad se hace a través del encoder lineal LXEP-40. La lectura obtenida mediante sensores, ası́ como la acción de control sobre las válvulas, se hace a través de la tarjeta de adquisición HUMUSOFT 624.. Figura 3.1: Robot paralelo SIMPRO y arquitectura RPSU-2SPS del mecanismo.. Como se puede apreciar, se estudia un robot de estructura mecánica compleja, donde para lograr los grados de libertad con que cuenta el sistema, resulta necesario el accionar conjunto de sus extremidades actuadas, según se muestra en la Tabla 3.1. Tabla 3.1: Actuadores involucrados en la mobilidad del robot. Movimiento de la Plataforma Actuadores involucrados Elevación (h) Pistones 1-2-3 Ladeo (θ) Pistones 2-3 Cabeceo (ϕ) Pistones 1-2-3 Gracias a la elongación controlada de los actuadores prismáticos se logra la orientación y elevación deseadas de la plataforma móvil en el espacio cartesiano y con ello simular movimientos que representan distintos escenarios virtuales visualizados en un monitor LCD ubicado en el interior de la cabina, desde donde el usuario puede observar un determinado mundo virtual. El sistema de control debe garantizar de forma automática la ubicación del elemento terminal del robot en la pose deseada, en correspondencia con la representación visual mostrada al usuario. Luego, las señales provenientes del entorno virtual sirven como puntos de referencia para los lazos de control que gobiernan a los pistones, garantizando posicionar y orientar en tiempo real la plataforma móvil. 33.
(46) Capı́tulo 3: Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. Las caracterı́sticas más importantes están resumidas en la tabla 3.1. Tabla 3.2: Principales descripciones del robot paralelo.. Descripción Parametros Diámetro del cilindro Máxima longitud del piston Máximo ángulo de cabeceo y ladeo Elevación de la plataforma móvil Masa total del robot. 125 mm 500 mm ±18 deg ±215 mm 1034 kg. Las uniones rotacionales pasivas están conectadas a cilindros neumáticos que representan las uniones activas prismáticas, cuyos movimientos lineales hace que la plataforma móvil realice ángulos de ladeo (θ) y cabeceo (ϕ). El movimiento lineal conforma la elevación en el eje z ′ , definido por la variable h. El sistema posee la capacidad de simular el movimiento de vehı́culos aéreos, marı́timos, terrestres; ligeros y pesados, por lo que sirve como medio de entrenamiento. Gracias a la posibilidad que brinda de recrear diferentes entornos virtuales, la plataforma de simulación también puede ser empleada como medio de juego y entretenimiento en parques de diversiones, hoteles y centros recreativos; gozando de gran demanda tanto dentro como fuera del paı́s.. 3.2.. Modelo dinámico de un actuador neumático. Los actuadores neumáticos de desplazamiento lineal tienen una amplia utilización industrial por presentar una tecnologı́a limpia, de bajo costo, respuesta rápida, elevada relación potencia-peso y fácil mantenimiento. En los últimos años estos actuadores han sido introducidos en aplicaciones que requieren posicionamiento continuo tales como: robots paralelos, plataformas de simulación y otras (Rubio et al., 2009a). En los últimos años, los actuadores neumáticos, se han venido introduciendo en aplicaciones tales como robots paralelos, plataformas de simulación y otras que requieren un posicionamiento continuo (Krejnin and Krivts, 2006). Estos constituyen una alternativa a los actuadores lineales eléctricos e hidráulicos, debido a que presenta ventajas 34.
(47) Capı́tulo 3: Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. significativas con respecto a estos tales como: El aire es de fácil captación y un recurso abundante. El aire no posee propiedades explosivas, por lo que no existen riesgos de incendios. Los actuadores pueden trabajar a velocidades razonablemente altas y fácilmente regulables. Las sobrecargas no constituyen situaciones peligrosas o que dañen los equipos en forma permanente. Los cambios de temperatura no afectan en forma significativa. En este caso se utilizan pistones de doble efecto debido a que la fuerza ejercida por el aire comprimido empuja al vástago para realizar un movimiento de traslación en los dos sentidos, disponiéndose de una fuerza útil tanto en la ida como en el retorno del vástago, lo cual justifica la elección realizada ya que los actuadores de la plataforma se mueven de manera controlada en ambas direcciones. Los actuadores electro-neumáticos están formados por un cilindro neumático, al cual se le debe acoplar directamente la carga, y una o varias válvulas electro-neumáticas conectadas a las cámaras del cilindro. Con el objetivo de alcanzar un posicionamiento preciso del vástago en el actuador requiere de un control a través de un lazo cerrado donde se tiene en cuenta factores no lineales como el comportamiento compresible del aire, las fricciones estáticas, dinámicas y viscosas presentes entre el vástago y el cilindro, ası́ como el comportamiento no lineal del flujo de aire que penetra en la cámara. Los pistones de doble efecto se emplean especialmente en los casos en que el vástago tiene que realizar una función también al retornar a su posición inicial. En principio, la carrera de los pistones no está limitada, pero hay que tener en cuenta el pandeo y doblado que puede sufrir el vástago desplazado. El modelo no lineal del sistema se obtiene a partir del modelo de la válvula, la dinámica de las presiones y el modelo de la masa móvil, donde se tiene en cuenta el dimensionamiento caracterı́stico presente en el carrete de las válvulas proporcionales neumáticas. El fluido gaseoso a través de ellas es mal lubricante y siempre va a existir 35.
(48) Capı́tulo 3: Modelado dinámico de la plataforma de 3 GDL en SIMULINK y ADAMS. un flujo constante en su punto de equilibrio que provoca una no linealidad en el sistema (Burrows, 1972). El modelo de un actuador requiere dividirse en tres sub-sistemas: 1. Modelo de la válvula: Contempla la dinámica del flujo de aire a través de la válvula en función de la acción de control y las presiones en sus extremos. 2. Modelo del actuador: Contempla la dinámica de las presiones en las cámaras del cilindro en función del flujo de aire y los volúmenes de las cámaras del cilindro, ası́ como sus variaciones. Estos dos últimos parámetros quedan definidos por la posición y velocidad del émbolo (y, por tanto, de la carga) si se conoce el área de sus dos caras. 3. Modelo de la carga: Contempla la dinámica del movimiento de la carga en función de las presiones aplicadas a cada lado del émbolo y las fuerzas externas y de fricción que estén presentes en la estructura mecánica El aire es suministrado a una presión Ps que penetra a través de unos orificios de áreas Ae1 y Ae2 y sale a la atmósfera a través de una presión Pa . Además el aire penetra a las cámaras del cilindro a través de unos orificios que se consideran de salidas para la válvula. Estos son denominados As1 y As2 . Las presiones con que los flujos de aire entran al cilindro P1 y P2 según la acción sobre el carrete actúan sobre las caras del émbolo perteneciente al cilindro y la fuerza resultante mueve al vástago del actuador a determinada posición. En la figura 3.2 se representa un gráfico donde están presentes las principales variables que definen al modelo matemático del actuador. El flujo másico de aire a través de los orificios de la válvula, depende del área del orificio y las presiones de entrada y salida y se calcula según la norma (ISO-6358, 1989) que establece:. Qm. . KxPe. KxPe. q 2. q 2. 273 T. 273 T. q 2. 1−. donde 36. 0 < r < rc r−rc 1−rc. r ≥ rc. (3.1).
Figure


+7



Documento similar
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
En este sentido, puede defenderse que, si la Administración está habilitada normativamente para actuar en una determinada materia mediante actuaciones formales, ejerciendo
En la parte central de la línea, entre los planes de gobierno o dirección política, en el extremo izquierdo, y los planes reguladores del uso del suelo (urbanísticos y
(1886-1887) encajarían bien en una antología de textos históricos. Sólo que para él la literatura es la que debe influir en la historia y no a la inversa, pues la verdad litera- ria
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Proporcione esta nota de seguridad y las copias de la versión para pacientes junto con el documento Preguntas frecuentes sobre contraindicaciones y
[r]
