Control virtual de un simulador de conducción
76
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control virtual de un simulador de conducción. Autor: Carlos Manuel Lorenzo García E-mail: [email protected]. Tutor: M.Sc. Ángel Ernesto Rubio Rodríguez Dpto. Automática y Sistemas Computacionales Facultad de Ingeniería Eléctrica. UCLV E-mail: [email protected]. Santa Clara 2008 "Año 50 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. ‘‘Quien indaga el futuro con el método científico, encontrará el resultado cierto, fuere bueno o malo el resultado, quien así no lo haga, quedará estancado en su tiempo.’’. Albert Einstein.
(5) ii. DEDICATORIA. ¾ Dedico este trabajo a mis padres que me han brindado su apoyo constante en todos los momentos de mi vida. ¾ A mi familia por siempre estar atenta de mis resultados docentes a lo largo de estos cinco años y preocuparse por el desempeño de este trabajo..
(6) iii. AGRADECIMIENTOS. ¾ A mi tutor, M.Sc. Ángel Ernesto Rubio Rodríguez, que con su ayuda este trabajo se dotó de resultados alentadores y me guió correctamente para el desarrollo adecuado de este documento. ¾ A mi padre y a mi madre por haberme guiado siempre por el camino correcto. ¾ A mi amiga Lyanet, que contribuyó en el diseño de este trabajo. ¾ A mis familiares y amigos que me brindaron sus consejos y apoyo para lograr mis metas trazadas como profesional. ¾ En. fin, agradezco a todas las personas que de una forma u otra. contribuyeron a la realización de este trabajo..
(7) iv. TAREAS TÉCNICAS. 1. Análisis de las tendencias en el modelado de estructuras mecánicas con objetivos de control. 2. Estudio de las ventajas y bondades del ADAMS como software para la simulación de estructuras mecánicas y su enlace con el Simulink de Matlab para recibir acciones de control. 3. Implementación en ADAMS de un actuador neumático moviendo una masa constante con el modelo de la fricción y controlarlo desde Simulink donde estará el modelo del sistema electro neumático. 4. Aplicación de la modelación en ADAMS con control desde Simulink a la estructura mecánica del simulador de conducción de SIMPRO.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En el presente trabajo de hace un análisis sobre las tendencias que presentan los software de simulación de plataformas mecánicas con objetivos de control y sobre las bondades que brida el software ADAMS para el simulado de plataformas mecánicas y el diseño de respectivas estrategias de control, motivos por los cuales fue escogido para simular el modelo dinámico de la plataforma con la cual se ha trabajado. Por medio de demostraciones matemáticas y de principios físicos se llega al modelo dinámico de un actuador electro-neumático y de la carga móvil asociada a este. Estos modelos se simulan en ADAMS y luego se enlaza con el Simulink de Matlab con el objetivo de intercambiar valores de determinadas variables de interés para el control de la plataforma. Por último se representa el modelo dinámico de la plataforma en ADAMS y luego se enlaza con el Simulink de Matlab con el propósito de simular en lazo cerrado el sistema en conjunto incluyendo la masa que representa la carga de la plataforma..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO ....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ....................................................................................................... iii TAREAS TÉCNICAS ..........................................................................................................iv RESUMEN ............................................................................................................................v INTRODUCCIÓN .................................................................................................................1 CAPÍTULO 1.. Estado del arte en cuanto a modelación de estructuras. mecánicas paralelas ............................................................................................................7 1.1. Modelos dinámicos de estructuras mecánicas paralelas ..............................7. 1.1.1. Dinámica de robots paralelos.....................................................................7. 1.1.2. Dinámica directa de robots paralelos utilizando las ecuaciones. explícitas de Gibbs-Appell ........................................................................................12 1.1.3. Dinámica multicuerpo de las plataformas RRPS ..................................17. 1.1.4. Modelación de la dinámica de sistemas multicuerpo mecánicos-. neumáticos ..................................................................................................................19 1.2 Ejemplificación de algunos software de simulación ........................................23 1.2.1. Simulink/Mechanics ...................................................................................23. 1.2.2. Virtual Robot ...............................................................................................24. 1.2.3. Inventor ........................................................................................................25.
(10) vii 1.2.4 1.3. ADAMS ........................................................................................................27. Conclusiones del capitulo .................................................................................28. CAPÍTULO 2. 2.1. Simulación de un actuador electro-neumático ..............................30. Modelo dinámico de un actuador electro-neumático ...................................30. 2.1.1. Flujo másico de aire a través de un orificio............................................31. 2.1.2. Flujo másico para válvula subdimensionada.........................................33. 2.1.3. Dinámica de las presiones en el cilindro ................................................34. 2.1.4. Balance de fuerzas en el cilindro.............................................................35. 2.1.5. Determinación experimental aproximada de la fricción .......................37. 2.1.6. Modelo no lineal resumido........................................................................37. 2.2. Modelo de la masa móvil en ADAMS .............................................................38. 2.3. Simulación en lazo cerrado ..............................................................................44. 2.4. Conclusiones del capitulo .................................................................................51. CAPÍTULO 3.. Simulación de la plataforma del simulador ....................................52. 3.1. Modelo de la plataforma en ADAMS...............................................................52. 3.2. Simulación en lazo cerrado ..............................................................................57. 3.3. Análisis económico ............................................................................................59. 3.4. Conclusiones del capitulo .................................................................................59. CONCLUSIONES Y RECOMENDACIONES ................................................................60 Conclusiones ..................................................................................................................60 Recomendaciones .........................................................................................................61 ANEXOS..............................................................................................................................62 Anexo I. Diagrama en bloques del subsistema válvula-cámara inferior...........62.
(11) viii Anexo II. Simulación del actuador en ADAMS utilizando la opción “Render”. mostrada en la barra de herramientas “Main Toolbox”............................................63 REFERENCIAS BIBLIOGRÁFICAS................................................................................64.
(12) INTRODUCCION. 1. INTRODUCCIÓN. El Grupo de Automatización de Sistemas Mecatrónicos (GIMAS) trabaja en la investigación sobre el diseño de los controladores para los simuladores desarrollados por la Empresa SIMPRO. Estos simuladores manejan complejas plataformas mecánicas de varios grados de libertad; el conocimiento de su dinámica es fundamental para el diseño del control de los simuladores de conducción. El control de estas plataformas sólo garantiza exigencias mínimas de prestaciones, por lo que se pretende escalar a simuladores de varios grados de libertad mucho más complejos, los cuales aún no se conocen bien dinámicamente. Para obtener los modelos dinámicos de estas plataformas se necesita tener en cuenta un profundo análisis matemático y físico basado en las leyes de Newton, multiplicadores de Lagrange, ecuaciones de Newton-Euler, ecuaciones de GibbsAppell de forma explícita y en teorías que constituyen vías para la obtención de estos modelos dinámicos. La segunda ley de Newton es utilizada por (Barrientos y otros, 1998) para la obtención de modelos dinámicos de estructuras mecánicas, esta ley se basa en el caso particular de estas estructuras en el planteamiento del equilibrio de fuerzas utilizado en sistemas multicuerpo. Las ecuaciones de Newton-Euler son trabajadas por (Díaz Rodríguez M., 2007), las mismas se aplican en su forma vectorial y se reformulan mediante operaciones de álgebra lineal para obtener la ecuación de movimiento. de. estructuras. mecánicas.. Se. pueden. modelar. y. calcular. numéricamente algunos tipos de plataformas a partir de ecuaciones matriciales diferenciales algebraicas, utilizando los parámetros de las ecuaciones de NewtonEuler referidas por (Haug, 1989), (Nikravesh, 1988). En la obtención de modelos.
(13) INTRODUCCION. 2. dinámicos de estructuras mecánicas de cadena cerrada (Merlet, 2006) afirma que los multiplicadores de Lagrange son una de las herramientas más utilizadas en estas estructuras y están considerados como un método clásico. Se emplean algoritmos basados en las ecuaciones de Gibbs-Appell para facilitar el trabajo matemático partiendo de la forma clásica de estas ecuaciones, (Kabala, 1996) propone las ecuaciones de Gibbs-Appell Explícitas (GAE), las cuales presentan como ventaja principal que el modelo dinámico está conformado por ecuaciones diferenciales ordinarias, además permiten que su obtención pueda ser realizada de forma sistemática empleando incluso algoritmos recursivos. Como se ha podido apreciar, aunque alguno de estos métodos conlleve a soluciones que logren simplificar en cierta medida el complejo trabajo matemático, no dejan de presentar cierto grado de dificultad y en especial cuando se trata de estructuras mecánicas paralelas. Al respecto se señala que existen programas de simulación cuya utilización como instrumento de ayuda a los procesos de modelado y diseño ha cobrado tanta importancia que hoy día resulta casi inconcebible subsistir en un mundo tan competitivo sin su implementación. Es previsible que el uso de estos programas vaya en aumento de forma vertiginosa, y de hecho existen muchos disponibles en el mercado con diferentes características y prestaciones. En el presente trabajo se mencionan las características y aplicaciones fundamentales de algunos programas de simulación que juegan un papel fundamental en el mundo de la robótica, tales son: Virtual Robot, Simulink/Mechanics, Autodesk/Inventor y ADAMS. El primero mencionado es un simulador multipropósito diseñado para la simulación de robots, está orientado tanto para aplicaciones industriales como para usos de investigación y propósitos educativos, aunque es básicamente una aplicación de modelado gráfico con prestaciones específicas para la simulación de robots, tiene la gran virtud de manejar una potente cinemática de estructuras mecánicas serie (Arteche, 2003), sin embargo no modela la dinámica de estas estructuras, se esta trabajando en su aplicación para robots paralelos..
(14) INTRODUCCION. 3. El Simulink/Mechanics es una herramienta de Matlab que tiene una gran cantidad de aplicaciones en muchos problemas prácticos de la ingeniería y de las matemáticas, es altamente utilizado en el diseño de sistemas de control, en procesamiento de señales, en inteligencia artificial y redes neuronales, en simulación de sistemas dinámicos y cinemáticos de estructuras mecánicas paralelas (MathWorks, 2002), sin embargo esta herramienta tiene una interfaz gráfica muy mala y requiere que se le den como datos los momentos de inercia, los cuales pueden ser complejos de determinar en la práctica. . Autodesk/Inventor es un paquete de modelado paramétrico de sólidos en 3D intuitivo para crear piezas y ensamblajes con herramientas de diseño funcional que permiten a los ingenieros concentrarse en la función del diseño para dirigir la creación automática de componentes avanzados, como estructuras de acero, maquinaria rotativa, tubos, conductos, mazos y cables eléctricos (Autodesk, 2008). Este software tiene la facilidad de manejar una buena cinemática, presenta una interfaz gráfica envidiable, sin embargo por el momento no permite el enlace con el Matlab. El ADAMS desarrolla y pone a prueba prototipos virtuales, realiza simulaciones realistas por el ordenador de manera visual y matemática del comportamiento real de los diseños de sistemas mecánicos, permite explorar una gran cantidad de variables de diseño de manera rápida y sencilla, y visualizar los resultados mediante gráficos, animaciones y cámara rápida, las simulaciones cinemáticas, estáticas y dinámicas se presentan en forma de gráfico, diagramas de datos, informes y animaciones coloridas (Dynamics, 2002). Este software permite el modelado de estructuras mecánicas paralelas, que calcula automáticamente los momentos de inercia de las partes móviles y permite recibir acciones de control desde Simulink y enviarle a este el comportamiento dinámico de la estructura para cerrar lazos de control, en los artículos que abordan este tema se emplea con gran frecuencia..
(15) INTRODUCCION. 4. Por todo lo mencionado anteriormente el grupo GIMAS ha decidido trabajar con ADAMS para el diseño de las estrategias de control de los simuladores (Álvarez, 2007). La complejidad de la modelación dinámica de las plataformas con que se están trabajando en GIMAS, implica necesariamente el empleo de un software que simule esta dinámica para permitir poner a punto diversas estrategias de control que se están investigando. Como software se ha decidido emplear el ADAMS, pero los pocos conocimientos que se tienen de su funcionamiento, limitan su empleo con estos fines por parte de los miembros del grupo. Lo anterior constituye el problema abordado en esta tesis y para su solución se debe dar respuesta a la siguiente interrogante: ¿cómo se pueden modelar en ADAMS estructuras mecánicas con actuadores paralelos y enlazar este modelo con el Simulink de Matlab donde se implementaría el control de la estructura? Con la solución de esta interrogante se dotará al grupo GIMAS de una potente herramienta de simulación que simplificará enormemente su trabajo. Como. se. ha. afirmado. anteriormente,. utilizando. el. ADAMS. se. hace. considerablemente más sencilla esta tarea, debido a que este simulador tiene la ventaja de manejar y simular estructuras mecánicas muy complejas y difíciles de modelar, pero además brinda la bondad de enlace con el Matlab y así de esta forma se puede diseñar una estrategia de control óptima para la plataforma neumática de conducción. Mediante el ADAMS y el Matlab/Simulink se pueden unir los modelos dinámicos del sistema neumático y el modelo dinámico del sistema mecánico, y así se diseñaría el sistema de control idóneo para gobernar variables de notable interés, tales como posición, velocidad y aceleración de los actuadores electroneumáticos. La simulación del modelo dinámico de los actuadores electro-neumáticos constituye el primer paso para extrapolar el control de las variables anteriormente mencionadas a un nivel superior, que seria sin dudas la manipulación con total dominio de la plataforma neumática..
(16) INTRODUCCION. 5. El presente trabajo tiene como objetivo general: La implementación en ADAMS de estructuras mecánicas con varios grados de libertad y controlarlas desde el Simulink de Matlab. Como objetivos específicos se establecen los siguientes: -. Analizar las tendencias en el modelado de estructuras mecánicas con objetivos de control.. -. Evaluar las posibilidades del ADAMS como software para la simulación de estructuras mecánicas y su enlace con el Simulink de Matlab para recibir acciones de control.. -. Implementar en ADAMS un actuador neumático moviendo una masa constante y controlarlo desde Simulink.. -. Controlar desde Simulink la estructura mecánica del simulador de conducción desarrollado en SIMPRO, el cual está implementado en ADAMS.. Para vencer estos objetivos se deben realizar las siguientes tareas: -. Valoración crítica de las tendencias en el modelado de estructuras mecánicas con objetivos de control.. -. Análisis de las posibilidades del ADAMS como software para la simulación de estructuras mecánicas y su enlace con el Simulink de Matlab para recibir acciones de control.. -. Implementación en ADAMS de un actuador neumático moviendo una masa constante con el modelo de la fricción y controlarlo desde Simulink donde estará el modelo del sistema electro neumático.. -. Aplicación de la modelación en ADAMS con control desde Simulink a la estructura mecánica del simulador de conducción de SIMPRO.. Organización del informe Capítulo I: Estado del arte en cuanto a modelación de estructuras mecánicas paralelas..
(17) INTRODUCCION. 6. En este capítulo se explican varias vías para obtener analíticamente los modelos dinámicos de estructuras mecánicas y se mencionan algunos software de simulación, así como sus principales características, se demuestra la tendencia que existe en el mundo de simular en el mundo virtual en lugar de trabajar con complicadas ecuaciones que describen el comportamiento dinámico de estas estructuras. Capítulo II: Simulación de un actuador electro-neumático. Este capítulo está dedicado a la modelación del modelo dinámico de un actuador electro-neumático, el modelo dinámico de la masa móvil en ADAMS, se hace una comparación entre los resultados obtenidos en las simulaciones de prueba en el Simulink y en el ADAMS, donde se concluye que los resultados son similares, finalmente se realiza la simulación del sistema en lazo cerrado. Capítulo III: Simulación de la plataforma del simulador. Aspectos tales como la representación en ADAMS de la plataforma del simulador de conducción de SIMPRO y su simulación en lazo cerrado serán los epígrafes que se tratarán en el capitulo III..
(18) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. CAPÍTULO 1.. 7. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. En el presente capítulo se presentará el estado del arte realizado sobre las diferentes vías de análisis para la obtención de modelos dinámicos complejos los cuales son representados por plataformas mecánicas que trabajan bajo principios electro-neumáticos. Además se hablará acerca del ADAMS como software de aplicación idóneo para la modelación de la plataforma con que se ha trabajado, así como de otros no menos importantes los cuales no cumplen algunos requisitos necesarios para su modelación. Uno de los propósitos de este trabajo es diseñar un sistema de control óptimo que gobierne variables de gran importancia y la modelación de la plataforma neumática en ADAMS. 1.1 Modelos dinámicos de estructuras mecánicas paralelas 1.1.1 Dinámica de robots paralelos En el área de los sistemas mecánicos, tales como robots industriales, se estudia la evolución del movimiento del sistema robótico debido a las fuerzas y/o pares externos aplicados. Las ecuaciones que definen estas relaciones dan como resultado el modelo dinámico del sistema a estudiar. La obtención y planteamiento de modelos matemáticos relacionados con la dinámica de los robots paralelos requiere de procedimientos muy complejos, y a medida que aumentan los grados de libertad de estas estructuras mecánicas también aumenta en gran medida el grado de complejidad de estos modelos. Por este motivo no siempre es posible obtener un modelo dinámico expresado de una forma cerrada, esto se realiza mediante una serie de ecuaciones normalmente de segundo orden de tipo.
(19) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 8. diferencial, cuya integración permite conocer el movimiento que surge al aplicar una fuerza, o las fuerzas que se aplicarán para obtener un movimiento determinado. El modelo dinámico debe ser resuelto de manera iterativa mediante la utilización de procedimientos numéricos (Barrientos y otros, 1998). Dependiendo del análisis requerido surgen dos tipos de problemas dinámicos. El primero denominado Problema Dinámico Inverso (PDI), en el cual se conoce el movimiento del sistema (posición, velocidad y aceleración) y se desea determinar las acciones, pares y/o fuerzas, necesarias para producir el movimiento preestablecido, la ecuación (1.1) muestra el comportamiento dinámico inverso de una estructura mecánica (Merlet, 2006). M ( x)W& + C (W , X (θ )) + G = τ. (1.1). Donde: M es la matriz de inercia definida positiva. G es el término gravitacional C es el término de la fuerza centrífuga y de Coriolis X , W y W& son la posición, la velocidad y la aceleración respectivamente. τ representa las fuerzas conjuntas Esta formulación es válida también para los robots en serie (Merlet, 2006). El segundo enfoque constituye la resolución del Problema Dinámico Directo (PDD), donde se conocen las acciones externas aplicadas al robot y se desea determinar el movimiento que este desarrolla a lo largo del tiempo. La resolución de ambos problemas presupone del conocimiento de un conjunto de parámetros físicos con un nivel de exactitud acorde con la precisión deseada. Estos parámetros se engloban en dos categorías: parámetros cinemáticos y parámetros dinámicos. Los primeros vienen en su mayoría definidos por la geometría del robot; longitud de las barras y orientación de los pares cinemáticas (Díaz Rodríguez M., 2007)..
(20) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 9. Los parámetros dinámicos vienen definidos por las propiedades de masa de las barras que constituyen el sistema robótico: masas, momentos, productos de inercia y ubicación del centro de gravedad. Adicionalmente la fricción es un fenómeno que es necesario considerar en el análisis y por ende los parámetros subyacentes en el modelo de fricción deben ser determinados. Los parámetros dinámicos junto con la fricción constituyen el conjunto de parámetros necesarios a identificar para la resolución del PDI y el PDD. A pesar que la identificación de parámetros dinámicos viene siendo estudiada desde mediados de los años ochenta, la necesidad de modelos más precisos, entre otras cosas por la demanda en los procesos industriales de robots operando a mayores velocidades, hacen que el tema de identificación de parámetros dinámicos continúe abierto y sea una de las áreas consideradas dentro de las principales perspectivas de investigación en la dinámica de sistemas multicuerpo (Barrientos y otros, 1998). Se parte de las ecuaciones de Newton-Euler (N-E) en su forma vectorial y se reformulan mediante operaciones de álgebra lineal para obtener la ecuación de movimiento bajo la forma requerida en el proceso de identificación. El modelo de cadena cerrada se sustituye por uno equivalente formado por una serie de cadenas abiertas obtenidas luego de seccionar la cadena cerrada en una o varias de sus juntas. Luego las ecuaciones de restricción, debidas a la separación, son incluidas utilizando los multiplicadores de Lagrange (Merlet, 2006). r r r r r r r K ( q , q& , q&&) ⋅ φ + A( q ) T ⋅ λ = τ. (1.2). La ecuación (1.2) puede separarse en función a las coordenadas independientes y dependientes utilizadas en el planteamiento del problema, de esta forma se tiene (1.3): r r r T K D ⋅ φ + AD ⋅ λ = τ D. (1.3). r r r T K I ⋅ φ + AI ⋅ λ = τ I. De la ecuación (1.2) puede despejarse el vector de los multiplicadores de Lagrange y sustituirse en la expresión (1.3) con lo cual se obtiene(1.4):.
(21) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. r r r ( K I + X T ⋅ K D ) ⋅ φ = τ I + X T ⋅τ D. 10. (1.4). −1. Donde X = − AD ⋅ AI , La ecuación tiene solución siempre y cuando la matriz AD no presente singularidades y sea por consiguiente inversible. Una vez presentada la formulación de las ecuaciones dinámicas en robots de cadena abierta y cerrada, se describen a continuación las técnicas numéricas utilizadas para la reducción del sistema. La ecuación (1.4) puede aplicarse para distintos puntos de una trayectoria determinada dando lugar al sistema lineal sobredimensionado, representado analíticamente con la ecuación (1.5) W ⋅φ = τ. (1.5). Donde W se denomina matriz de observación para una trayectoria específica. Las dimensiones de W y. r. τ. son. ((n. pts. xn DOF )x10n ) y. ((n. pts. xn DOF )x1) , respectivamente,. siendo n pts el número de puntos de la trayectoria y n DOF los grados de libertad del sistema (Díaz Rodríguez M., 2007). La ecuación anterior constituye un sistema lineal de ecuaciones donde se desconoce el valor de los parámetros inerciales agrupados en el vector Φ. La resolución del problema puede realizarse mediante mínimos cuadrados. Lo anterior se cumple siempre y cuando la matriz sea de rango completo. En el problema de identificación de parámetros dinámicos la matriz W es de rango deficiente, esto es debido a que no todos los parámetros contribuyen en la magnitud de las fuerzas externas (fuerza o pares en los actuadores). Adicionalmente se tiene que no todos los parámetros influyen de forma independiente, pero sí bajo combinaciones lineales junto con otros parámetros. Los parámetros que no influyen en el comportamiento dinámico del robot se determinan fácilmente ya que la columna asociada a dichos parámetros es nula. Para determinar los parámetros que influyen bajo combinación lineal, (Bennis, 1994) propone un procedimiento simbólico en ese mismo sentido pero utilizando.
(22) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 11. procedimientos numéricos, (Gautier, 1991) propone métodos equivalentes, uno de ellos se basa en la descomposición en valores singulares (DVS). El modelo dinámico obtenido se denomina modelo canónico o modelo dinámico con un número mínimo de parámetros inerciales, o también denominados parámetros base. Como ejemplo del modelo de parámetro base, considérese el robot paralelo mostrado en la figura 1.1. El robot consta de 70 parámetros inerciales (10 por cada barra). El mismo se reduce a 25 parámetros. Para determinar el modelo canónico se implementó en el paquete computacional Matlab (Díaz Rodríguez M., 2007).. Figura 1.1. Robot de tres grados de libertad..
(23) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 12. 1.1.2 Dinámica directa de robots paralelos utilizando las ecuaciones explícitas de Gibbs-Appell La dinámica directa de sistemas multicuerpo abarca el estudio de las fuerzas aplicadas a sistemas mecánicos y su respuesta cinemática. Los robots paralelos (RP) consisten de una plataforma móvil unida a través de varias cadenas cinemáticas a una plataforma fija. Los RP son muy utilizados en la actualidad sobre todo en ciertas aplicaciones industriales, donde es requerido interactuar con grandes cargas. Este tipo de sistemas presenta ventajas importantes respecto a otros sistemas multicuerpo, por su mayor rigidez y relación de tamaño de sus componentes, lo cual le permite una mayor relación tamaño-carga de trabajo. La principal desventaja de los RP radica en que su configuración en lazo cerrado restringe el movimiento del sistema, lo cual dificulta la obtención sistemática de las ecuaciones que definen su comportamiento dinámico. Al igual que en los sistemas de cadenas abiertas, diversos principios de la dinámica han sido empleados para determinar las ecuaciones que modelan el comportamiento dinámico de los RP. Es así, por ejemplo las ecuaciones de Newton-Euler, las de Lagrange-Euler, y el principio de los trabajos virtuales. Las ecuaciones. obtenidas. empleando. los. principios. de. la. dinámica. antes. mencionados, conllevan a la resolución principalmente de dos tipos de modelos. El primero de ellos se trata de un sistema aumentado, en el cual las ecuaciones de restricción debido a la configuración cerrada del RP son incluidas a través de los Multiplicadores de Lagrange (Haug, 1989). En este caso el modelo queda definido por un sistema algebraico diferencial, donde el número de ecuaciones viene dado por el número de coordenadas generalizadas utilizadas y el número de ecuaciones de restricción. En la obtención de dicho sistema de ecuaciones que conforma el modelo del sistema pueden ser empleados algoritmos recursivos eficientes desarrollados originalmente para cadenas abiertas. Sin embargo, es bien sabido que la solución de un sistema algebraico diferencial es laboriosa desde el punto de vista numérico, presentándose la posibilidad de incumplir con las restricciones cinemáticas. El segundo tipo de modelo matemático que se podría conformar, consiste en un sistema reducido, donde las ecuaciones de movimiento están.
(24) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 13. constituidas por un número de ecuaciones ordinarias, igual a los grados de libertad del sistema (GDL). Aunque este procedimiento presenta la ventaja de obtener un número mínimo de ecuaciones y que adicionalmente las ecuaciones obtenidas son diferenciales ordinarias, esta metodología dificulta la utilización de algoritmos recursivos que permitan determinar sistemáticamente el modelo. Adicionalmente, obliga a la construcción de un modelo diferente para cada RP, haciendo aún más complicada su obtención. Partiendo de las ecuaciones de Gibbs-Appell (G-A) y el principio de mínima acción, (Kabala, 1996) propone las ecuaciones de Gibbs-Appell Explícitas (GAE), las cuales presentan como ventaja principal que el modelo dinámico está conformado por ecuaciones diferenciales ordinarias, además permiten que su obtención pueda ser realizada de forma sistemática empleando algoritmos recursivos. El fundamento de las ecuaciones de GAE se sustenta en la transformación de un sistema restringido de nxm ecuaciones diferenciales (n es el número de coordenadas generalizadas y m el de ecuaciones de restricción) en un sistema de n ecuaciones diferenciales ordinarias. El sistema de nxm ecuaciones se obtiene al separar el sistema mecánico restringido para obtener un conjunto de varias cadenas abiertas. De esta forma se obtienen un número de n ecuaciones que definen el modelo dinámico de las cadenas abiertas. r D ⋅ q&& = γ. (1.6). siendo,. ⎡ Dee D=⎢ ⎣ Die. Dei ⎤ Dii ⎥⎦. (1.7). &r& &qr& = ⎡qe ⎤ ⎢ &r& ⎥ ⎣ qi ⎦. (1.8). r ⎡γ e ⎤ γ =⎢r ⎥ ⎣γ i ⎦. (1.9). r.
(25) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 14. Donde D es la matriz de masas y se agrupa en varias submatrices: una asociada a las coordenadas independientes Dii, una correspondiente a las coordenadas dependientes Dee, y una asociada a las coordenadas dependientes e r independientes Die. El vector q denota las coordenadas generalizadas y γ es el vector que contiene los términos de las fuerzas centrifugas, Coriolis, gravedad y externas. A la ecuación (1.6) es necesario adicionarle las m ecuaciones de restricción:. [Φ e. r r Φ i ] q&& = σ. (1.10). r Siendo σ el vector que contiene los términos dependientes de las velocidades generalizadas, y Φ es el jacobiano de restricciones cinemáticas. Aplicando el principio de mínima acción de Gauss al sistema constituido por las ecuaciones (1.6) y (1.10) respectivamente, se obtienen las ecuaciones GAE: r r Φi σ ⎤ ⎡q&&e ⎤ ⎡ ⎤ T ⎥ ⋅ ⎢ &r& ⎥ = ⎢ r −1 r ⎥ T T T r T Dii + X ⋅ Dee ⋅ X − Die ⋅ X − X Die ⎦ ⎣ qi ⎦ ⎣γ i − X ⋅ γ e + ( X ⋅ Dee − Die )Φ e ⋅ σ ⎦. ⎡Φ e ⎢0 ⎣. (1.11) donde: X = Φ −1 e ⋅ Φ i. (1.12). Una de las principales razones del uso no extendido de las ecuaciones GAE radica en la dificultad para la obtención de manera sistemática de las submatrices independientes y dependientes de la matriz de masas. En este sentido se propone una metodología para la resolución de la dinámica de los RP. El primer paso en la resolución de la dinámica directa de un RP consiste en separar las ecuaciones que modelan al robot en los pares cinemáticos que unen la plataforma móvil. De esta forma se obtiene un sistema conformado por tantas cadenas abiertas como piernas presente el robot. La dinámica de cada pierna se determina mediante la siguiente expresión:. [D ] [q&& ] k. k. nxn. nx1. r = γ k nx1. (1.13).
(26) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 15. El subíndice k identifica el número de cadenas abiertas y n el número de barras asociadas a la pierna. Si el RP consta de k piernas, la dinámica directa de las ramas se obtiene por separado de la forma:. [D ] [q&r& ] 1. 1. nxn. nx1. [D ] [q&r& ] 2. r = γ 1 nx1. 2. mxm. mx1. [D ] [q&r& ] k. k. sxs. sx1. (1.14). r = γ 2 mx1. r = γ k sx1. (1.15) (1.16). Las matrices de masas D pueden ser halladas utilizando algoritmos desarrollados para resolver el PDD. En este trabajo se emplean algoritmos basados en las ecuaciones de G-A para facilitar el trabajo matemático (Mata V., 2002). La matriz de masas global se define como: ⎡ D1ii ⎢ Dii = ⎢ 0 ⎢ 0 ⎣. ⎡ D1ie ⎢ Die = ⎢ 0 ⎢ 0 ⎣ ⎡ D1ei ⎢ Dei = ⎢ 0 ⎢ 0 ⎣ ⎡ D1ee ⎢ Dee = ⎢ 0 ⎢ 0 ⎣. 0 D1ii 0. 0 D. 1. ie. 0 0 1. D ie 0 0 D1ie 0. 0 ⎤ ⎥ 0 ⎥ D1ii ⎥⎦. (1.17). 0 ⎤ ⎥ 0 ⎥ D k ie ⎥⎦. (1.18). 0 ⎤ ⎥ 0 ⎥ D k ei ⎥⎦. (1.19). 0 ⎤ ⎥ 0 ⎥ D k ee ⎥⎦. (1.20). r Los vectores γ se determinan de manera eficiente adecuando algoritmos que. resuelven el problema dinámico inverso (PDI) (Orin, 1982). Este procedimiento consiste en anular en el algoritmo PDI, los términos relacionados con las r r aceleraciones en los nudos. Los vectores γ e , γ i , se obtienen de forma simple al.
(27) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 16. seleccionar directamente las filas asociadas a las coordenadas independientes. Para completar el modelo dinámico del RP, es necesario incluir la relación entre las coordenadas dependientes. Esto se lleva a cabo derivando las ecuaciones cinemáticas de restricción dos veces respecto al tiempo como se muestra a continuación: Φ ( q, t ) = 0. (1.21). r Φ q q& = −Φ t. (1.22). r r r r Φ q q&& = −Φtt − (Φ q ⋅ q& ) q ⋅ q& − 2 ⋅ Φ qt q&. (1.23). Los subíndices t y q, indican diferenciación respecto al tiempo y a las coordenadas generalizadas respectivamente. Las ecuaciones de restricción en el caso del RP modelan las restricciones en los pares cinemáticos seccionados. El jacobiano de restricciones Φ q se obtiene utilizando herramientas de álgebra computacional del programa Maple. Para su solución numérica las ecuaciones anteriores se codifican en el programa Matlab. Se estudió el comportamiento dinámico de un RP de tres grados de libertad (3GDL) mediante el Matlab. El sistema está constituido por una base móvil unida por medio de tres cadenas abiertas al marco de referencia, como se muestra en la figura 1.2..
(28) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 17. Figura 1.2. Robot paralelo de 3GDL.. 1.1.3 Dinámica multicuerpo de las plataformas RRPS Los robots RRPS están basados en una plataforma paralela de seis grados de libertad, con cadena cinemática del tipo RRPS (donde los grados de libertad RR corresponden a una articulación universal, P es un grado de libertad prismático que corresponde al accionamiento de potencia lineal y S es una junta esférica que une el actuador lineal con el efector final (Aracil, 1999). La dinámica de una plataforma RRPS, se puede modelar y calcular numéricamente a partir de la ecuación matricial diferencial algebraica (1.24) (Haug, 1989), (Nikravesh, 1988). Debido a que las velocidades y aceleraciones no son integrables, las expresiones generales de la dinámica, para la solución del problema dinámico directo se deben escribir en términos de los parámetros de Euler, mostrados en la ecuación (1.24)..
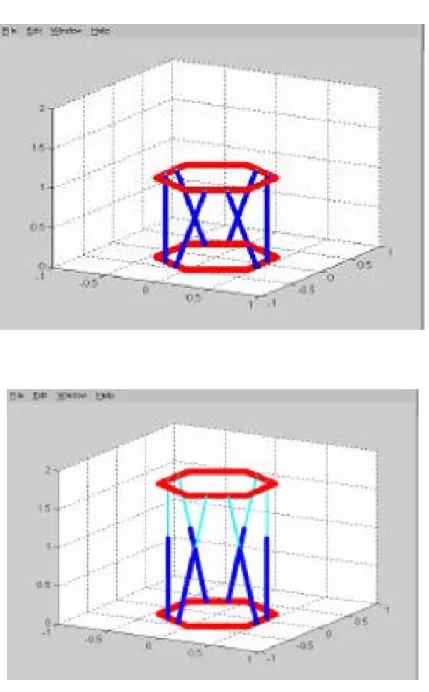
(29) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. ⎡M ⎢ ⎢ 0 ⎢Φ ⎢ p ⎢⎣ 0. Φp T T 4G J ⋅ G Φ p Φp 0 p Φp 0 0. T. ⎤ 0 ⎤ ⎡ γ&& ⎤ ⎡ FA ⎥ ⎢ ⎥ pT ⎥ ⎢ T A T Φ p ⎥ ⎢ &p& ⎥ ⎢2G n + 8G& J&G& p ⎥ ⋅ = ⎥ 0 ⎥ ⎢λ ⎥ ⎢ γ ⎥ ⎢ ⎥ ⎢ ⎥ p 0 ⎥⎦ ⎣⎢λ p ⎦⎥ ⎣⎢ γ ⎦⎥. 18. (1.24). Donde: J y M son las matrices de inercia y de masa de cada uno de los cuerpos que forman el sistema,. G4 x 4 son matrices. que se obtienen a partir de las. identidades de los parámetros de Euler, P son los vectores de los parámetros de Euler de cada uno de los sistemas qi de coordenadas generalizadas, F A son las fuerzas externas aplicadas, γ son los términos de las aceleraciones y λ son los vectores de los multiplicadores de Lagrange, que físicamente representan las fuerzas de restricción entre los pares de cuerpos. La solución del problema dinámico inverso se obtiene resolviendo la ecuación anterior, en términos de los multiplicadores de Lagrange y transformando estos parámetros a los sistemas de referencia de cada cuerpo para obtener las fuerzas de reacción y los pares o fuerzas requeridos en los accionamientos de potencia para cumplir con la planificación de trayectorias. La solución del problema dinámico directo es más complejo. Para estos efectos se debe resolver la ecuación diferencial algebraica anterior en consideración de las condiciones iniciales, despejando los términos de las aceleraciones y aplicando algoritmos de integración numérica especiales para este tipo de ecuaciones mixtas diferenciales algebraicas, con el fin de obtener la velocidad y posición que deben satisfacer además las siguientes ecuaciones de restricción: Φ (r , p, t ) = 0, Φ P = 0 y Φ r ⋅ r& + Φ π ⋅ ω = 0. (1.25). Para la resolución de la cinemática directa se ha desarrollado un simulador en MATLAB utilizando las ecuaciones anteriores de la dinámica multicuerpo. La figura 1.3 muestra una animación del modelo obtenido para una fuerza constante aplicada sobre cada actuador durante un periodo de 0.5 segundos. Para resolver el problema de integración se utilizó el Método del Algoritmo Híbrido (Park, 1986)..
(30) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 19. Figura 1.3. Animación para la simulación de la dinámica directa.. 1.1.4 Modelación de la dinámica de sistemas multicuerpo mecánicosneumáticos El modelo matemático de la dinámica de los actuadores neumáticos y del flujo de aire a través de la entrada y salida de las válvulas se basa en ecuaciones conocidas (G.Belforte, 1984). La matriz del modelo matemático del actuador se muestra en la siguiente ecuación:. x = Ax& + c. (1.26).
(31) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 20. x = [ x& , &x&, Pa , Pb ]T x& = [ x& , &x&, P&a , P&b ]T. 1 ⎡0 γ ⎢ 0 − ⎢ M A= ⎢0 0 ⎢ 0 ⎣⎢0. 0 A M fa 0. 0 ⎤. −. αA ⎥. M⎥ 0 ⎥ ⎥ f b ⎦⎥. c = [0,− F , g a , g b ]T. donde :. x es el golpe del actuador, Pa y Pb son las presiones del aire en las cámaras A y B respectivamente, F es la suma de las fuerzas externas que actúan sobre el pistón a lo largo de la. dirección x M es la masa general del pistón. Los términos. f a y f b representan los efectos de la cinemática del pistón en los. gradientes de presión g a y g b representan los efectos del flujo de masa, como se muestra a continuación: f a ( x, x& ) =. Ax&n Wa + Ax. (1.27). f b ( x, x& ) =. Ax&n Wb + αA( L − x). (1.28). g a (Ga , Pa , x ) =. nGa P0. 1/ n. ρ 0(Wa + Ax )Pa (1−n ) / n. (1.29).
(32) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. g b (Gb , Pb , x ) =. nGb P0. 21. 1/ n. ρ 0[Wb + αA(L − x )]Pb (1−n ) / n. (1.30). En estas ecuaciones Ga y Gb son los flujos de masa del fluido que entra o sale de las cámaras A y B respectivamente, A representa la sección transversal de la zona cilíndrica. Wa y el Wb son los volúmenes muertos n es el índice de la transformación politrópica del aire. ρ 0 es la densidad normal del aire Con el fin de validar el método multicuerpo, se han realizado algunas simulaciones del robot neumático TORX, representadas en las figuras 1.4 y 1.5. La simulación del robot dentro del software recrea el mismo tipo de error de control, consecuencia de las propiedades del modelo mecánico-neumático.. Figura 1.4. Interfaz del software de simulación de multicuerpo..
(33) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. Figura 1.5. Simulación tridimensional de sistemas multicuerpo de robot TORX.. 22.
(34) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 23. 1.2 Ejemplificación de algunos software de simulación 1.2.1 Simulink/Mechanics A nivel industrial esta herramienta de Matlab tiene una gran cantidad de aplicaciones en muchos problemas prácticos de la ingeniería y de las matemáticas. Es altamente utilizado en el diseño de sistemas de control, en procesamiento de señales, en inteligencia artificial y redes neuronales, en simulación de sistemas dinámicos y cinemáticas de estructuras mecánicas paralelas (MathWorks, 2002). Sin embargo esta herramienta tiene una interfaz grafica muy mala y no permite el cálculo de momentos de inercia. La figura 1.6 muestra la librería de Simulink , la cual brinda una amplia gama de dispositivos y de funciones que se implementan en el Matlab estableciéndose así una estrecha comunicación entre ambos. Esta herramienta al formar parte del Matlab, comparte muchas de las prestaciones y ventajas que proporciona el mismo, se considera además como un entorno y al mismo tiempo como un lenguaje de programación.. Figura 1.6. Ventana que muestra la librería de Simulink..
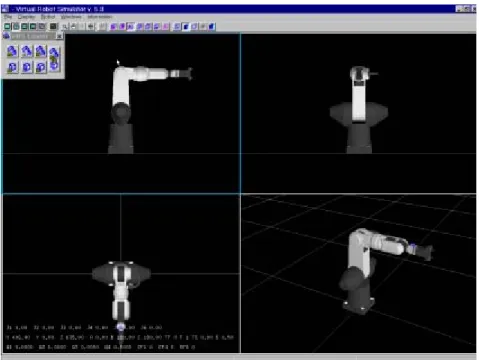
(35) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 24. 1.2.2 Virtual Robot El Virtual Robot (VR) es un simulador multipropósito diseñado para la simulación de robots, desarrollado por la línea de investigación en Telerrobótica del Departamento de Ingeniería de Sistemas y Automática (DISA) de la Universidad Politécnica de Valencia (UPV). Su objetivo está orientado tanto para aplicaciones industriales como para usos de investigación y propósitos educativos. Es básicamente una aplicación de modelado gráfico con prestaciones específicas para la simulación de robots que dispone de la posibilidad de generar programas de aplicaciones externas (programas ejecutables en Windows) para su control. De hecho, muchas de las opciones de su interfaz están desarrolladas como aplicaciones externas llamadas Virtual Robot Tools (Arteche, 2003). Además de las posibilidades de simulación directa con el programa y las Virtual Robot Tools, permite la programación de las acciones de robots virtuales con programas desarrollados en C que pueden ser ejecutados en un entorno de ejecución propio para la cómoda depuración de los programas. Permite añadir un entorno al robot con piezas que el robot puede manipular actuando con una pinza y que se pueden tomar como referencia de movimientos de los robots. Tiene la gran virtud de manejar una potente cinemática de estructuras mecánicas serie, sin embargo no modela la dinámica de estas estructuras y se esta trabajando en su aplicación para robots paralelos. En la figura 1.7 se muestra una representación en el ambiente de Virtual Robot un Robot CRS A465..
(36) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 25. Figura 1.7. Robot CRS A465 en Virtual Robot.. 1.2.3 Inventor Autodesk/Inventor es un paquete de modelado paramétrico de sólidos en 3D producido por la empresa de software Autodesk. Los productos Autodesk/Inventor combinan un entorno de diseño 3D intuitivo para crear piezas y ensamblajes con herramientas de diseño funcional que permiten a los ingenieros concentrarse en la función del diseño para dirigir la creación automática de componentes avanzados, como estructuras de acero, maquinaria rotativa, tubos, conductos, mazos y cables eléctricos. En la figura 1.8 se muestra el diseño de una plataforma neumática creada en Inventor (Autodesk, 2008)..
(37) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 26. Figura 1.8.. Figura 1.8. Plataforma neumática diseñada en Inventor Este software de simulación de estructuras mecánicas paralelas tiene la facilidad de manejar una buena cinemática, presenta una interfaz grafica envidiable, nos brinda una gran variedad de opciones para el diseño de estructuras de este tipo, se pueden exportar modelos para otros software de aplicaciones mecánicas, permite la modificación de modelos y de materiales de piezas, contiene una amplia biblioteca de funciones para el modelado de estructuras; en fin ,este software nos proporciona muchas bondades de gran importancia para el diseño de estructuras mecánicas paralelas, sin embargo por el momento no permite el enlace con el Matlab, por lo tanto no se puede diseñar una estrategia de control para gobernar variables de interés en la plataforma con que se está trabajando..
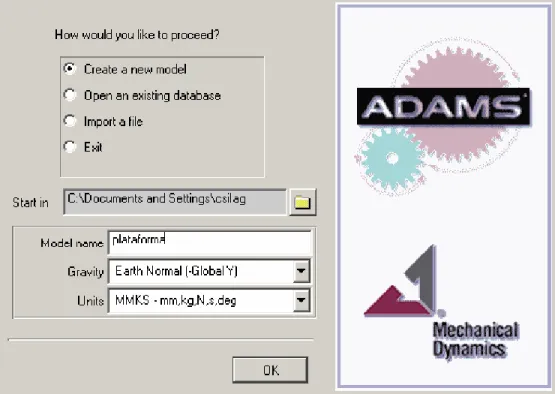
(38) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 27. 1.2.4 ADAMS ADAMS (Automatic Dynamic Analysis of Mechanical Systems): Análisis Dinámico Automático de Sistemas Mecánicos, es la denominación comercial de un software que realiza análisis sobre mecanismos. ADAMS es un software para simulación dinámica de sistemas mecánicos que por medio de la implementación de herramientas numéricas ofrece una gran variedad de elementos que sirven para modelar cualquier sistema mecánico (figura 1.9). Este programa desarrolla y pone a prueba prototipos virtuales, realiza simulaciones realistas por el ordenador de manera visual y matemática del comportamiento real de los diseños de sistemas mecánicos. Con la ayuda del ADAMS se optimiza en gran medida el tiempo de realización de modelos reales y ensayos que antes se confeccionaban en días o meses. Permite visualizar el comportamiento de los diseños y mejorarlos.. Figura 1.9. Pantalla de inicio. ADAMS permite explorar una gran cantidad de variables de diseño de manera rápida y sencilla, y visualizar los resultados mediante gráficos, animaciones y.
(39) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. 28. cámara rápida. A partir de los resultados que se obtienen con precisión se pueden modificar los diseños de los sistemas mecánicos. Entre las características de ADAMS la más importante es que permite el vínculo con otros programas y acomodar estos a las necesidades del usuario. El paquete ADAMS cuenta con un módulo de simulación donde se encuentran agrupadas todas las herramientas matemáticas, llamado ADAMS/Solver; además cuenta con una interfaz amigable para facilitar el diseño de modelos, llamada ADAMS/View (Álvarez, 2007). ADAMS brinda la posibilidad de simular el movimiento para analizar el comportamiento complejo del modelo mecánico. También posibilita el enlace con el Simulink de Matlab para propósitos de control, que son definitivamente uno de los principales aspectos a tratar en este trabajo. En el módulo ADAMS/Control se pueden analizar sistemas de control, tales como hidráulicos, electrónicos y neumáticos. Sus funciones se ven resaltadas en una biblioteca llena de empalmes y apremios, la cual está disponible para crear mecanismos articulados. Una vez que el prototipo virtual sea completo, ADAMS comprueba el modelo y después funcionan las ecuaciones simultáneas para las simulaciones cinemáticas, estáticas y dinámicas, las cuales se presentan en forma de gráfico, diagramas de datos, informes y animaciones coloridas (Álvarez, 2007). 1.3 Conclusiones del capitulo -Como se pudo observar el tratamiento analítico de los modelos dinámicos de las estructuras mecánicas paralelas resulta muy complejo, los sistemas de ecuaciones son de tipo diferencial y se tornan complicadas cuando son de orden superior, aunque generalmente se trabaja con ecuaciones de segundo orden. -A lo largo del capítulo se ha presenciado una tendencia al uso de los software de simulación y no siendo así por la vía analítica. -En este trabajo se decidió optar por la elección del ADAMS como software de simulación idóneo para la modelación de la plataforma neumática debido a que.
(40) CAPÍTULO 1. Estado del arte en cuanto a modelación de estructuras mecánicas paralelas. permite. la. simulación. de. estructuras. mecánicas. paralelas,. 29 calcula. automáticamente los momentos de inercia del sistema y brinda la posibilidad de enlace con el Simulink de Matlab..
(41) CAPÍTULO II. Simulación de un actuador electro-neumático. 30. CAPÍTULO 2. Simulación de un actuador electro-neumático. Este capítulo se dedica a la exposición del modelo dinámico no lineal de un actuador electro-neumático y el desarrollo de una serie de experimentos para la obtención de sus parámetros. El modelo no lineal del sistema se obtendrá a partir del modelo de la válvula, la dinámica de las presiones y el modelo de la masa móvil, teniendo en cuenta el subdimensionamiento característico presente en el carrete de las válvulas proporcionales neumáticas, con las cuales se trabajará. El fluido gaseoso que pasa a través de ellas es mal lubricante y siempre va a existir un flujo constante en su punto de equilibrio que provoca una no linealidad en el sistema. Al final del capitulo se simulará el actuador electro-neumático con la carga y luego en lazo cerrado. 2.1 Modelo dinámico de un actuador electro-neumático Para llegar al modelo dinámico de un actuador electro-neumático primeramente se debe describir el proceso físico con el cual se trabaja. En el caso que se estudia el aire es suministrado a una presión Ps, el mismo entra a través de los orificios de áreas Ae1 y Ae2 y sale a la atmósfera a presión Pa a través de los orificios de áreas As1 y As2 , según la acción de control u aplicada a la válvula; el cilindro modifica las presiones P1 y P2 en sus cámaras, que en función de la posición del émbolo, tendrán los volúmenes V1 y V2 a ambos lados del embolo. Las presiones P1 y P2 actúan sobre las caras del émbolo del cilindro de áreas A1 y A2, ejerciendo una fuerza que mueve al embolo del cilindro a la posición y, la masa M está sometida a una fuerza externa Fext, dV1 y dV2 representan los.
(42) CAPÍTULO II. Simulación de un actuador electro-neumático. 31. volúmenes mínimos que quedan en cada cámara cuando el émbolo del cilindro está totalmente recogido con respecto a cada una de ellas. En la figura 2.1 se muestra un gráfico detallado de las principales variables que intervendrán en el modelo. Pa. Ps. As1 Ae1. Pa. Ae2 As2 u. y. dV2. dV1 P1, V1, A1. Fext. A2, P2, V2. Figura 2.1. Esquema del actuador electro-neumático.. 2.1.1 Flujo másico de aire a través de un orificio Despreciando la variación del flujo másico de aire durante el desplazamiento del carrete de la válvula en cada instante de tiempo, puede considerarse que este flujo es el mismo que en estado estacionario para las mismas condiciones de presión y área efectiva del orificio (Brun, 2000). De esta forma el modelo de la válvula puede dividirse en dos partes: Una primera, correspondiente a la dinámica del posicionamiento de su carrete, que depende fundamentalmente del sistema electromecánico que emplee y la segunda corresponde al modelo de la característica estática del flujo de aire a través del orificio. El flujo de aire es función de la temperatura del aire, el área efectiva del orificio y las presiones antes y después del mismo. Para caracterizar el flujo de aire a través de los.
(43) CAPÍTULO II. Simulación de un actuador electro-neumático. 32. orificios de la válvula se analiza primeramente el flujo de aire por un orificio de área variable y luego ese análisis se extrapola a los orificios de la válvula. El flujo másico de aire a través de un orificio de área variable es una función altamente no lineal, dependiente fundamentalmente de las presiones de entrada y salida del orificio y del área del mismo. Se emplea una aproximación en la norma internacional ISO-6358 para convertir el modelo en uno mucho más sencillo que el de las leyes físicas, con resultados matemáticos muy similares (Janiszowski, 2004), (Kawashima, 2004). Según la norma ISO 6358 el flujo volumétrico de un gas a través de un orificio, dado en litros normalizados por minutos (Nl/min), está dado por: ⎧ 273 ⎪ K A Pent T ⎪ Qv = ⎨ 2 ⎪ K A Pent 273 1 − ⎛⎜ r − rc ⎞⎟ ⎪⎩ T ⎝ 1 − rc ⎠. 0 < r < rc. (2.1) r ≥ rc. donde:. r=. Psal Pent. (2.2). Siendo Pent y Psal las presiones absolutas de entrada y salida del agujero (en Pa), A el área efectiva del mismo (en m2), K una constante de proporcionalidad (K = 113.2 Nl / min m2 Pa), T la temperatura de trabajo (en °K) y rc la razón de presión crítica que define si la región de trabajo es sónica (0<r<rc) o subsónica (r>rc). El factor rc depende, entre otras cosas, de la geometría del orificio, según (Kawashima, 2004). El litro normalizado de aire (Nl) se define como un litro de aire a una temperatura de 0 °C y 1 bar de presión A partir de esta definición, se puede establecer el factor de conversión entre el flujo volumétrico (Nl/min) y el flujo másico (kg/s):.
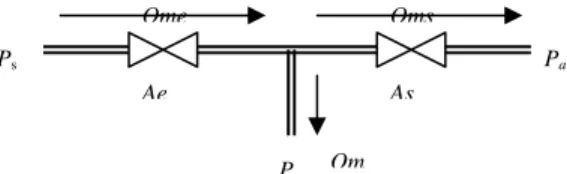
(44) CAPÍTULO II. Simulación de un actuador electro-neumático. 33. 1,292 10 −3 kg / s kc = Nl / min 60. (2.3). finalmente:. Qm = kc Qv. (2.4). 2.1.2 Flujo másico para válvula subdimensionada En. las. válvulas. reales. el. carrete. puede. estar. sobre-ajustado. (sobredimensionado) o sub-ajustado (subdimensionado) respecto a los orificios. Se requeriría de una muy alta precisión en su construcción para evitar este problema, especialmente cuando se trata de válvulas para fluidos gaseosos. Las válvulas sobre-ajustadas son aquellas cuyos orificios son más pequeños que los segmentos del carrete que cubre a cada uno, por lo que quedan totalmente clausurados para cierto rango alrededor de la posición central del carrete de la válvula. Este diseño no tiene fugas pero introduce una no linealidad de tipo zona muerta en el sistema que dificulta su manipulación. Por otra parte las válvulas sub-ajustadas son aquellas cuyos orificios son más grandes que los segmentos del carrete que los cubre, de forma que existe un escape entre la fuente de presión y el sumidero para cierto rango alrededor de la posición central del carrete de la válvula. Este tipo no tiene el problema de la zona muerta pero requiere el modelado de las fugas. En las válvulas hidráulicas está mucho más extendido el diseño sobre-ajustado para evitar fugas de aceite al sumidero. La zona muerta se les compensa aplicando la técnica comúnmente llamada dither. Esta consiste en añadir una señal de alta frecuencia y baja amplitud a la acción de control, que provoca una rápida pero pequeña oscilación de la válvula y mejora la sensibilidad y la linealidad de la misma. Por el contrario, las válvulas para aplicaciones neumáticas, generalmente son del tipo sub-ajustadas dado que el aire no es un buen lubricante y así también se disminuye la sensibilidad a la suciedad..
(45) CAPÍTULO II. Simulación de un actuador electro-neumático. 34. Para modelar esta característica sólo habría que tener en cuenta que el flujo de aire hacia las cámaras del cilindro depende de un par de orificios independientes para cada cámara: los de entrada de áreas Ae1 y Ae2 y los de salida de áreas As1 y As2 señalados con anterioridad en la figura 2.1. A continuación se ilustran nuevamente de otra forma para ayudar a su comprensión (figura 2.2) Qme. Qms. Ae. As. Ps. Pa. P. Qm. Figura 2.2. Representación de los flujos de aire. Teniendo en cuenta los flujos de entrada y salida, los flujos hacia el cilindro serían:. Qm1 = Qme1 ( Ps , P1 , Ae1 ) − Qms1 ( P1 , Pa , As1 ) Qm2 = Qme2 ( Ps , P2 , Ae2 ) − Qms 2 ( P2 , Pa , As 2 ). (2.5). Los flujos de entrada y salida se calculan según las ecuaciones (2.1) y (2.4) con los parámetros señalados en (2.5). Sólo faltaría determinar Ae y As en función de la acción de control (característica estática de la válvula) para completar el modelo. 2.1.3 Dinámica de las presiones en el cilindro Considerando que el aire es un gas ideal, que la temperatura y presión dentro de las cámaras del cilindro están uniformemente distribuidas, y que la energía cinética y potencial son despreciables (Brun, 2000), (Richer, 2000) la relación entre presión (P) y volumen (V) para el aire puede escribirse como:. PV = m RT. (2.6). Donde R es la constante de los gases ideales (R=287,2 J / kg°K), T la temperatura absoluta del aire y m su masa. Despejando P de (2.6), considerando temperatura constante, y la masa y el volumen variables en el tiempo, al derivar P se llega a:.
(46) CAPÍTULO II. Simulación de un actuador electro-neumático. ⎛ V Qm − m V& ⎞ ⎟⎟ P& = R T ⎜⎜ V2 ⎠ ⎝. 35 (2.7). Donde Qm es el flujo másico de aire ( m& ). Despejando m de (2.6):. m=. PV RT. (2.8). Sustituyendo (2.8) en (2.7) se tiene: RT P& = V. ⎛ P V& ⎞ ⎟⎟ ⎜⎜ Qm − R T ⎠ ⎝. (2.9). Para el caso específico de la cámara inferior del cilindro se tiene que: V1 = A1 y. (2.10). por tanto: RT P&1 = V1 ( y ). ⎛ P A ⎜⎜ Qm1 − 1 1 RT ⎝. y& ⎞ ⎟⎟ ⎠. (2.11). Para la cámara superior el volumen está dado por: V2 = A2 (Ymx − y ) = A2 Ymx − A2 y. (2.12). Donde Ymx es el desplazamiento máximo del cilindro. De ahí que:. V&2 = − A2 y&. (2.13). y por tanto: RT P&2 = V2 ( y ). ⎛ P A y& ⎞ ⎜⎜ Qm2 + 2 2 ⎟⎟ RT ⎠ ⎝. (2.14). 2.1.4 Balance de fuerzas en el cilindro El balance de fuerzas en el cilindro queda expresado como sigue:. P1 A1 − P2 A2 − Pa Av − Fext − Ff = M &y&. (2.15).
(47) CAPÍTULO II. Simulación de un actuador electro-neumático. 36. Donde Av es el área de la sección transversal del vástago del cilindro y Ff es la fuerza de fricción. Las presiones son absolutas y todas las variables y constantes expresadas en el Sistema Internacional de Unidades. Numerosos autores han trabajado los modelos de la fuerza de fricción, entre ellos se destacan (Wang, 2002), (Guenther, 2006) entre otros. El modelo más generalizado da la fuerza de fricción como una suma discontinua de la fricción estática, la fricción de Coulomb y la fricción viscosa (figura 2.3(a)). Los modelos más complejos incluyen el llamado efecto de Stribeck que refleja la inversión de la relación fuerza-velocidad (figura 2.3(b)), este efecto ocurre a muy bajas velocidades y es sumamente difícil de identificar en la práctica (Åström, 1999), por lo cual se descarta en este trabajo. Ff. Ff. Fe. Fe. Fc. Fc. Cv. Cv. . y. (a) Modelo Generalizado. . y. (b) Modelo con efecto Stribeck.. Figura 2.3. Modelos de la fuerza de fricción. Para el modelo generalizado la fuerza de fricción se modela según la expresión:. ⎧ Ft ⎪ Ff = ⎨ Fe sgn( Ft ) ⎪ Fc sgn( y& ) + b y& ⎩. y& = 0, y& = 0,. Ft < Fe Ft ≥ Fe. (2.16). y& ≠ 0. con:. Ft = P1 A1 − P2 A2 − Pa Av − Fext. (2.17). Donde Ft es la fuerza total aplicada, Fe la fricción estática, Fc la fricción de Coulomb y b el coeficiente de fricción viscosa..
(48) CAPÍTULO II. Simulación de un actuador electro-neumático. 37. 2.1.5 Determinación experimental aproximada de la fricción Para la determinación experimental aproximada de Fe, Fc y b se realiza el siguiente experimento. Al cilindro se le suministra por ambas cámaras el flujo de la válvula totalmente cerrada (fuga de la válvula); esto provoca un aumento al unísono de las presiones en ambas cámaras que, por la diferencia de área en ambas caras del émbolo, da una fuerza resultante en aumento lentamente, lo cual permite medir de forma aproximada la fricción estática máxima (justo antes de comenzar el movimiento) y la fricción de Coulomb (valor que queda durante el movimiento). Durante este experimento la fuerza que actúa sobre el émbolo, asumiendo que no hay Fext y despreciando la aceleración durante el movimiento, Ff se calcula despejando de (2.15). Del experimento se concluye que la fuerza máxima (antes de comenzar a moverse) aplicada al émbolo, por la diferencia de presión en sus caras, es aproximadamente 57 N y en el instante en que comienza a moverse dicha fuerza queda con un valor próximo a los 50 N y luego aumenta a 54 N durante el movimiento antes de llegar al tope físico. Como se conoce el área del vástago del cilindro se puede determinar que la fuerza que ejerce la presión atmosférica sobre el mismo es de 20 N. Restando esta fuerza a las obtenidas en el experimento se obtienen los valores aproximados de Fe = 37 N y Fc = 30 N. Durante el tramo en movimiento a una velocidad de aproximadamente 110 mm/s el aumento de la fuerza es de 4 N por lo que aproximadamente b = 0,036 N / mm/s. 2.1.6 Modelo no lineal resumido Finalmente, el modelo dinámico no lineal de un actuador electro-neumático, se resume con las ecuaciones (2.11), (2.14) y (2.15), y puede escribirse como sigue:.
(49) CAPÍTULO II. Simulación de un actuador electro-neumático. ⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎩. dP1 PA ⎤ RT ⎡ = Qm1 (P1 , Ae1 , As1 ) − 1 1 v ⎥ ⎢ dt V1 ( y ) ⎣ RT ⎦ dP2 P A ⎤ RT ⎡ Qm2 (P2 , Ae2 , As2 ) + 2 2 v ⎥ = ⎢ dt V2 ( y ) ⎣ RT ⎦ dv 1 A1 P1 − A2 P2 − F f (v) − ( Fext + Av Pa ) = dt M ∂y =v ∂t. [. ]. 38. (2.18). Modelos similares a este han sido empleados para la síntesis de numerosos controladores (Richer, 2000), (Laghrouche, 2004), (Smaoui, 2006) no obstante es común en la literatura que este modelo se linealice y se obtenga una familia de modelos en función de la posición (Brun, 2000), (Janiszowski, 2004), (Karpenko, 2006). 2.2 Modelo de la masa móvil en ADAMS En ADAMS se diseñan sistemas mecánicos desde muy simples hasta tan complejos como se requiera, en este caso se trata de un actuador electroneumático sometido a un experimento real, este dispositivo está unido a una masa móvil de 4.5kg, la figura 2.4 muestra un esquema donde se representa el sistema que se experimenta.. Figura 2.4. Esquema de la planta de pruebas (TestBed)..
(50) CAPÍTULO II. Simulación de un actuador electro-neumático. 39. La válvula proporcional manda al cilindro neumático aire a una presión dada provocando en este un desplazamiento, el movimiento experimentado se convierte en una señal eléctrica mediante un potenciómetro y se realimenta a la tarjeta de una computadora personal, de esta forma desde el ordenador se decide la acción de mando sobre la válvula dando como resultado una señal neumática. Para la realización de este experimento se utilizó una plataforma de prueba (Testbed) la cual se ilustra en la figura 2.5, este dispositivo dispone de dos actuadores electro-neumáticos los cuales se responsabilizan directamente que el sistema resista determinado peso y reaccione a las acciones de mando pertinentes que el operador decida. Esta tarea se implementó con la modelación de uno de los actuadores, se eligió solamente uno debido a que presentan características aproximadamente iguales.. Figura 2.5. Foto de la planta de pruebas (TestBed). El actuador se simuló en ADAMS, el mismo está constituido por un cilindro exterior hueco con topes en sus dos extremos indicando fin del movimiento cuyo largo es de 430 mm, de radios exterior e interior iguales a 50 mm y 42 mm respectivamente, el actuador está compuesto además por un cilindro interior con ancho igual a 10 mm y largo de 500 mm el cual representa el vástago, una pieza.
(51) CAPÍTULO II. Simulación de un actuador electro-neumático. 40. en el centro del mismo que equivale al desplazamiento traslacional del vástago, la masa móvil está representada por una pieza cúbica de aristas iguales a 100 mm, todo el sistema conformado por estos elementos es construido con acero de densidad igual a 7801.0 kg/m^3, el actuador electro-neumático está sostenido en el espacio por una unión rígida representada por un candado. Al diseñar el sistema en el simulador virtual con todos los pasos algorítmicos que esto implica se obtiene el modelo representado en la figura 2.6, existe otro modo de representar el diseño mediante la opción RENDER, en este caso se puede observar el sistema en un entorno más estético, pero con la desventaja de no presenciar los detalles de la estructura mecánica (ver Anexo II).. Figura 2.6. Simulación del actuador en ADAMS. El actuador es sometido a una fuerza ejercida por una masa de 4,5 kg, esta fuerza es declarada como una variable de entrada en ADAMS, luego resulta de gran interés conocer los valores de la posición, velocidad y aceleración de la masa que se dispone en el cilindro neumático, esto se logra declarando como.
Figure



+7



Documento similar
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
En la parte central de la línea, entre los planes de gobierno o dirección política, en el extremo izquierdo, y los planes reguladores del uso del suelo (urbanísticos y
