A new methodology for inverse kinematics and trajectory planning of humanoid biped robots
Texto completo
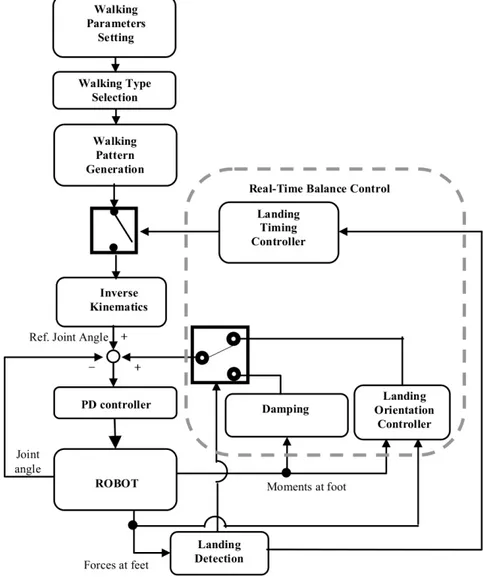
Figure





Documento similar
the analysis and study of the historical trajectory of sports until becoming a sociocultural and educational phenomenon that promotes the wellbeing, the review
1. S., III, 52, 1-3: Examinadas estas cosas por nosotros, sería apropiado a los lugares antes citados tratar lo contado en la historia sobre las Amazonas que había antiguamente
Since such powers frequently exist outside the institutional framework, and/or exercise their influence through channels exempt (or simply out of reach) from any political
In the previous sections we have shown how astronomical alignments and solar hierophanies – with a common interest in the solstices − were substantiated in the
While Russian nostalgia for the late-socialism of the Brezhnev era began only after the clear-cut rupture of 1991, nostalgia for the 1970s seems to have emerged in Algeria
In this respect, a comparison with The Shadow of the Glen is very useful, since the text finished by Synge in 1904 can be considered a complex development of the opposition
Figure 4(a) and Figure 4(b) present the impact of varying the forgiveness factor for different window sizes with CBR and VBR traffic sources respectively and shows the
The jerk, a research field of great interest in quite different academic communities, is the time rate
