Evaluación del uso de software libre en la disciplina Sistemas de Control
64
0
0
Texto completo
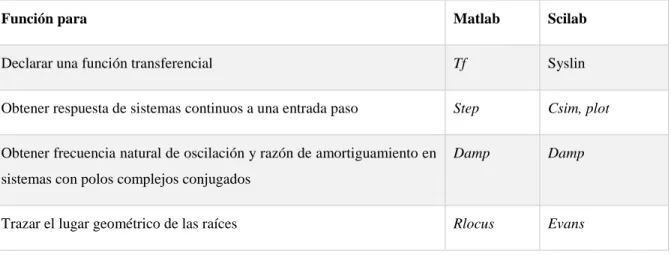
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Evaluación del uso de software libre en la Disciplina Sistemas de Control. Autor: Jorge Luis Pérez Lanza jplanza@uclv.edu.cu. Tutor: PT Dr.C. Iván Santana Ching email: ching@uclv.edu..cu. PA MsC. María del Carmen Hernández Carús email: carmen@uclv.edu.cu. Santa Clara 2015 "Año 57 de la Revolución".
(3) i. PENSAMIENTO. “Las obras de conocimiento deben ser libres, no hay excusas para que no sea así.” Richard M. Stallman.
(4) ii. DEDICATORIA. A DIOS, a toda mi familia, a Marian y a todos mis amigos….
(5) iii. AGRADECIMIENTOS. A Dios, por bendecirme con mi familia y por iluminar siempre mí camino, todo se lo debo a Él. A mi Mamá, por darme todo su amor y por indicarme siempre el buen camino. A mi Papá, por ser mi mejor socio y darme el mejor ejemplo de padre y de hombre. A “Wary”, por compartirlo todo conmigo desde que llegue al mundo, por cuidar siempre de mí y por ayudarme tanto con este trabajo. A mi segunda madre, mi abuela Lilian, ella es sin duda la mejor científica que he conocido. A mi abuela “Cuqui”, por ser tan cariñosas y transmitirme tanta sabiduría. A mi abuelo, por enseñarme a mantener la calma y ser perseverante en mis estudios. A mis primas y mis tíos que siempre me recibían en su casa para darme cariño y compartir “el pan” conmigo. A mi gran amor, Marian, gracias a ella he podido superar muchas de mis barreras y seguir adelante; y a “Suegri”, por acogerme en casa como su hijo varón. A mi tutores Ching y M. del C., que aun teniendo poco tiempo dedicaron su mejor esfuerzo para ayudarme. También a Machado que en secreto fue mi tercer tutor. A todos mis amigos, especialmente a “El mío” y a “Ortega”, lo cuales pasaron tanto tiempo junto a mí en el 206. A todos los profesores de Automática, por transmitirme sus conocimientos..
(6) iv. RESUMEN. El software libre hoy en día es una realidad en el mundo; las aplicaciones que se crean sobre esta base son cada día más eficientes y se difunden en todos los campos del conocimiento. En la actualidad, en la carrera Ingeniería en Automática de la Universidad Central “Marta Abreu” de Las Villas, la mayoría de los software que se utilizan son propietarios, lo que trae consigo una serie de limitaciones. En este trabajo se realizó un estudio acerca del software propietario Matlab, el cual se usa en las actividades prácticas de las asignaturas del currículo base de la Disciplina Sistemas de Control. Se exponen cuáles son las desventajas de usar el mismo y se evaluó el uso de un software libre que tenga iguales prestaciones como solución. Se analizaron los distintos software libres similares a Matlab y se seleccionó a Scilab como alternativa. Por último se desarrollaron casos de estudio con el fin de comprobar las potencialidades de Scilab como software a usar en el desarrollo de las actividades prácticas de dicha disciplina..
(7) v. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii RESUMEN ............................................................................................................................iv INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. ESTUDIO. DE. SOFTWARE. EN. LA. ENSEÑANZA. DE. LA. DISCIPLINA SISTEMAS DE CONTROL ............................................................................ 4 1.1. Educación en Ingeniería en Automática .................................................................. 4. 1.2. Definición de software libre ..................................................................................... 7. 1.2.1. Aspectos importantes para la migración a software libre ................................. 9. 1.2.2. Software libre en la educación ........................................................................ 11. 1.3. Software libre en las universidades ........................................................................ 12. 1.3.1. Software libre en la Universidad Central “Marta Abreu” de Las Villas ........ 13. 1.3.2. Software libre en la carrera Ingeniera en Automática de la UCLV ................ 14. 1.4. Software libre alternativos a Matlab ...................................................................... 14. 1.4.1. GNU Octave ................................................................................................... 14. 1.4.2. FreeMat ........................................................................................................... 16. 1.4.3. Scilab .............................................................................................................. 16. 1.5. Apreciaciones del capítulo. .................................................................................... 18.
(8) vi CAPÍTULO 2.. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA. DISCIPLINA SISTEMAS DE CONTROL .......................................................................... 19 2.1. Software libre en la Disciplina Sistemas de Control .............................................. 19. 2.2. Comparación entre software libres para su uso en la Disciplina Sistemas de. Control. Normas de calidad .............................................................................................. 20 2.3. Análisis de software usado en las asignaturas de la Disciplina Sistemas de Control 28. 2.3.1. Modelado y simulación ................................................................................... 29. 2.3.2. Ingeniería de Control I .................................................................................... 30. 2.3.3. Ingeniería de Control II................................................................................... 31. 2.3.4. Procesos .......................................................................................................... 32. 2.3.5. Maquinaria eléctrica ....................................................................................... 33. 2.3.6. Accionamiento Eléctrico................................................................................. 34. 2.3.7. Control de Procesos I ...................................................................................... 34. 2.4. Apreciaciones del capítulo ................................................................................. 35. CAPÍTULO 3.. CASOS DE ESTUDIO QUE PERMITEN COMPARAR LAS. FACILIDADES DE MATLAB Y SCILAB PARA EL ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL SIMPLE .................................................................................. 36 3.1. Funciones más usadas de Matlab para el diseño de sistemas de control simples y. su equivalente en Scilab ................................................................................................ 36 3.2. Ejercicios ilustrativos entre Matlab y Scilab ...................................................... 37. 3.2.1. Sintonía de un controlador PID a partir del lugar geométrico de las raíces ... 38. 3.2.2. Ajustes de un controlador a partir de requisitos de estabilidad relativa en el. campo de la frecuencia ................................................................................................. 40 3.2.3. Análisis de la importancia de la selección adecuada del tiempo de muestreo. en el desempeño de un sistema de control digital ......................................................... 42.
(9) vii 3.2.4. Análisis de alinealidades ................................................................................. 43. 3.3. Valoraciones sobre la migración a Scilab .......................................................... 45. 3.4. Análisis económico ............................................................................................ 45. 3.5. Apreciciones del capítulo ................................................................................... 46. CONCLUSIONES Y RECOMENDACIONES ................................................................... 47 Conclusiones ..................................................................................................................... 47 Recomendaciones ............................................................................................................. 48 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 49 ANEXOS .............................................................................................................................. 52 Anexo I. Código que permite darle solución a la sintonía de un regulador PID a partir. del LGR, a) en Matlab, b) en Scilab ................................................................................. 52 Anexo II. Código que permite darle solución al ajuste de un controlador a partir de. requisitos de estabilidad relativa en el campo de la frecuencia, a) en Matlab, b) en Scilab 53 Anexo III. Sintaxis en Scilab de las principales funciones usadas en las asignaturas del. currículo base de las asignaturas de la Disciplina Sistemas de Control, a) sistemas continuos, b) sistemas discretos ........................................................................................ 53.
(10) INTRODUCCIÓN. 1. INTRODUCCIÓN. En los años 70 del pasado siglo, la computación empezaba a tomar auge; era común que los desarrolladores de software publicaran sus trabajos para que otros los pudieran utilizar y mejorar. En las décadas siguientes la computación se colocó entre el grupo de ciencias que más impulsaban el desarrollo tecnológico en el mundo, tal es el caso de la Ingeniería Automática, la cual ha alcanzado su avance gracias al progreso de los software. Sin embargo, el software usado en esta rama de la ingeniaría es muy costoso y esto impide a muchos países desarrollar investigaciones que tributen a la automatización de industrias. A pesar de que la humanidad cuenta con una Declaración Internacional de los Derechos Humanos, en el mundo digital que cada día cobra más importancia en áreas como salud, educación, investigaciones y otras ramas, no están definidas normas o derechos que regulen la libertad digital. Es por esto que muchos países se ven obligados a buscar alternativas económicamente viables para impulsar el desarrollo de sus principales sectores. Una de las principales es el software libre, el cual surge en el año 1984 como un movimiento ético, político y social. Cuando se menciona software libre, las figuras más conocidas de este movimiento son Richard M. Stallman, creador de la Free Software Foundation, y Linus Torvalds, creador del kernel de los sistemas GNU/Linux. Este movimiento tiene como objetivo principal defender la libertad de los usuarios en un mundo donde cada día se depende más de las computadoras. Desde su surgimiento se ha propuesto el fomento de la solidaridad, cooperación e independencia de los usuarios y desarrolladores. Según Stallman, las universidades como fuente de creación y divulgación de conocimiento deben asumir, entre sus compromisos sociales, la promoción y el desarrollo del software libre como herramienta liberadora, ya que es innegable los aportes del software propietario.
(11) INTRODUCCIÓN. 2. en la creación del conocimiento, pero su propia naturaleza va contra otra obligación de las universidades –la divulgación– pues limita la misma (R. Stallman, 2004). En el caso de las universidades cubanas que, siempre han estado a la vanguardia en la investigación y divulgación del conocimiento, presentan la limitante de los problemas legales que trae el software privativo consigo; tal es el caso de la carrera Ingeniería en Automática, específicamente la Disciplina Sistema de Control, que usa como software de apoyo para las prácticas a Matlab. La situación problemática que da lugar a la realización de este trabajo es que Matlab es el software utilizado en las asignaturas de la Disciplina Sistema de Control, pero es privado y altamente costoso; además, debido al bloqueo económico-financiero impuesto a Cuba por los EE.UU no se puede adquirir una licencia para el uso del mismo. Para dar solución a esta realidad se pretende analizar las distintas variantes de software libre disponibles en la actualidad para ver cuál de ellas puede ser utilizada. Como hipótesis se plantea que el uso de un software libre con prestaciones similares a Matlab garantizaría la realización de las actividades prácticas de las asignaturas de la Disciplina Sistema de Control, sin limitaciones de licencia por el uso del software. A partir de lo anterior, se define como objetivo general de este trabajo: evaluar software libres alternativos a Matlab para usarlos en la Disciplina Sistema de Control de la carrera Ingeniería en Automática. Los objetivos específicos son: . Identificar los software libres con alta capacidad de procesamiento numérico que sean similares a Matlab.. Comparar con Matlab los software libres seleccionados en cuanto a los requerimientos de las asignaturas del currículo base de la Disciplina Sistemas de Control. . Valorar la sustitución de Matlab por el software libre seleccionado..
(12) INTRODUCCIÓN. 3. Organización del informe El informe consta de introducción, tres capítulos, conclusiones, recomendaciones, referencias bibliográficas y anexos. CAPÍTULO I: en el primer capítulo se realiza un estudio crítico de la literatura especializada que se ha consultado. Se analiza el software usado en la enseñanza de la Disciplina Sistemas de Control y se exponen las ventajas de sustituir al mismo por un software libre. Se presenta el impacto que ha alcanzado el software libre en el mundo y en Cuba. Además se destacan los aspectos importantes para una migración a este tipo de software. Se identifican los principales software libres con alta capacidad de procesamiento numérico similares a Matlab. CAPÍTULO II: en el segundo capítulo, sobre la base de la búsqueda bibliográfica expuesta en el primer capítulo, se toma como referencia a Matlab para hacer una comparación entre los distintos software presentados. Se elige un software y se analizan sus potencialidades en el desarrollo de las actividades prácticas de la Disciplina Sistema de Control. CAPÍTULO III: en el tercer capítulo se exponen las principales funciones de Matlab y de Scilab para el diseño de sistemas de control. Se presentan casos de estudio que permiten comparar las facilidades de Matlab y Scilab para el análisis y diseño de sistemas de control simples. Por último se valora la posible sustitución de Matlab por Scilab en las actividades prácticas de la Disciplina Sistemas de Control y se realiza un análisis económico..
(13) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 4. DE CONTROL. CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS DE CONTROL. Introducción En este capítulo se hace una breve descripción de la enseñanza de Ingeniería en Automática en la Universidad Central “Marta Abreu” de Las Villas. Se exponen cuáles son los principales software de soporte para la enseñanza en algunas disciplinas y se hace alusión a las desventajas que trae consigo el uso de software privado en las mismas; específicamente se analiza la situación del software privado que se usa en las prácticas de la Disciplina Sistema de Control. Como principal alternativa a la situación anterior se propone el uso del software libre; para ello se hace un análisis de las ventajas y del impacto que ha tenido este tipo de software en el mundo. 1.1. Educación en Ingeniería en Automática. Los estudios de automatización tienen sus inicios en Cuba en la década de los años sesenta con la llegada de especialistas checoslovacos en dicho campo. Es a partir del trabajo elaborado por ellos cuando comienzan a impartirse asignaturas relacionadas con el Control Automático en la Universidad de Oriente y el Instituto Superior Politécnico “José Antonio Echeverría” de La Habana. Los primeros graduados reciben un número limitado de asignaturas relacionadas con el Control Automático. Posteriormente comienzan a prepararse de forma similar profesionales en este perfil en la Universidad Central “Marta Abreu” de Las Villas (UCLV) y a partir del curso 1990-91 se inicia la preparación de.
(14) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 5. DE CONTROL. profesionales en la carrera de Ingeniería en Automática. Esta carrera surge a partir de la fusión entre las carreras Máquinas Computadoras y Control Automático. El graduado en Ingeniería Automática es un profesional de perfil amplio y debe tener los elementos básicos para poder participar en tareas de diseño en sus esferas de actuación, como son: los sistemas de control, la instrumentación, la electrónica y la computación (hardware y software de bajo y alto nivel), siendo esta última una de las principales herramientas y esferas de desarrollo. En la actualidad, el Ingeniero en Automática recibe una docencia asistida en gran parte por los software; esto se debe a la facilidad de interacción y a las grandes prestaciones de los mismos. En la tabla 1.1 se aprecian algunas disciplinas de la carrera de Ingeniería en Automática y los distintos software que se usan en las mismas. Tabla 1.1 Disciplina y software utilizado en las mismas Disciplina. Software utilizado. Sistema de Control. Matlab-Simulink. Programación. Code::Blocks, Qt, Microsoft Visual Studio.. Computación. Emu8086, LabView, Movicon X2, Matlab, Eclipse, Mplab, Proteus.. Instrumentación. KGL WIN, Movicon X2, LabView, Matlab.. Electrónica. Orcad, Proteus.. Dibujo. AutoCad.. Muchos de los software en la tabla anterior poseen una alta capacidad de procesamiento numérico y constituyen la mejor opción para dar soporte a las distintas disciplinas; sin embargo la mayoría de estos software son privados y su uso está sujeto a una licencia de alto costo. A todo lo anterior se suma que nuestro país no puede adquirir dichos software por vía legal debido al bloqueo económico financiero impuesto por Estados Unidos, o sea,.
(15) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 6. DE CONTROL. que Cuba se enfrenta a problemas económicos y políticos en la adquisición de software imprescindibles para la carrera de Ingeniería en Automática. Un ejemplo clave del problema antes mencionado lo constituye la Disciplina Sistema de Control, una de las más importantes de la carrera de Ingeniería en Automática de la UCLV. Esta disciplina se ocupa de modelar, analizar y diseñar sistemas de control lineales y no lineales, continuos y discretos, sistemas de una entrada y una salida, así como de múltiples entradas y múltiples salidas. El principal software usado en la enseñanza de esta disciplina es Matlab, ya que todos sus problemas de cálculo y simulación se pueden resolver con este software (Ogata, 1998). Entre sus prestaciones básicas se hallan: la manipulación de matrices, la representación de datos y funciones, la implementación de algoritmos, la creación de interfaces de usuario (GUI) y la comunicación con programas en otros lenguajes y con otros dispositivos hardware. Además, el paquete Matlab dispone de dos herramientas adicionales que expanden sus prestaciones: Simulink (plataforma de simulación multidominio) y GUIDE (editor de interfaces de usuario - GUI) (MathWorks, 2014; Pérez López, 2002). La potencialidad de este software en la Disciplina Sistemas de Control se debe a que el mismo cuenta con un conjunto de herramientas para diseño de sistemas automáticos y el estudio de su comportamiento; de forma general se le conoce como Control System Toolbox1 (Traver, Pascual, Buenestado, & Gibergans, 2003). También Matlab incluye dentro de sus herramientas Matlab Web Server, la cual se usa en los laboratorios virtuales y remotos para el aprendizaje a distancia de los sistemas de control (Valera, Vallés, & Díez, 2010) y para el control remoto de procesos industriales (A & M, 2005). Por todo lo anterior se puede afirmar que Matlab es sin duda el mejor soporte para el análisis y diseño de sistemas de control; sin embargo, este software tiene el inconveniente de su altísimo precio, ya que para adquirir el mismo sin ningún Toolbox específico hay que pagar $2150 USD y $1000 USD más por cada Toolbox solicitado (MathWorks, 2015) y además, la licencia aumenta su costo mientras mayor sea el número de usuarios y computadoras que usen Matlab bajo una misma licencia; en otras palabras, las. 1. Toolbox: paquetes de herramientas que se usan para expandir las prestaciones de Matlab..
(16) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 7. DE CONTROL. universidades que usen a Matlab tienen que pagar un número significativo de dinero por su uso. A lo anterior se suma que Cuba no puede adquirir una licencia para uso de Matlab debido al bloqueo, por tanto su adquisición es por una vía no legal o a través de un tercer país. Ante la problemática anterior, una buena opción es recurrir al uso de software libre para dar soporte a las distintas asignaturas de la Disciplina Sistema de Control; para ello es necesario comprobar que dicho software tenga potencialidades muy similares a las de Matlab. 1.2. Definición de software libre. El software libre es aquel que respeta la libertad de los usuarios sobre su producto adquirido y, por tanto, debe venir acompañado del código fuente para hacer efectivas las libertades. De forma general, su principal promotor, Richard Stallman, lo define como la libertad para ejecutar, copiar, distribuir, estudiar, modificar y mejorar el software (Adell & Bernabé, 2007). También presenta altos niveles de seguridad y calidad, además permite crear cultura de colaboración, aumenta las capacidades tecnológicas y de desarrollo de las instituciones locales y reduce la dependencia de desarrolladores y proveedores propietarios. Es muy importante no confundir el software libre con el software gratuito, éste no cuesta nada, hecho que no lo convierte en software libre, porque no es un problema de precio, sino de libertad. Para poder encauzar esta libertad, Stallman creó en 1985 la Fundación del Software Libre (FSF) (R. M. Stallman & Manual, 1986) y definió cuatro libertades básicas que tiene que cumplir el software libre (López, 2005): 1. Usar el programa, con cualquier propósito 2. Estudiar cómo funciona el programa y adaptarlo a las necesidades específicas del usuario mediante el acceso al código fuente 3. Distribuir copias, de las que puedan beneficiarse otros usuarios 4. Mejorar el programa y hacer público esos desarrollos, de modo que toda la comunidad se beneficie de ello.
(17) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 8. DE CONTROL. Para amparar jurídicamente estos cuatro propósitos, se redactó y se utiliza la denominada licencia GNU GPL (Licencia Pública de GNU). Los términos y condiciones de GPL deben estar disponibles para cualquiera que reciba una copia de la obra al cual ha sido aplicada esta licencia. Cualquier licencia que se le apliquen dichos términos da permiso a realizar modificaciones a una obra, realizar copias y distribuirlas o distribuir cualquiera de sus versiones derivadas. Con esta licencia está permitido cobrar por la distribución de cada copia, o no cobrar nada. Este último punto distingue las licencias GPL de las licencias de software que prohíben la distribución comercial. La FSF argumenta que en el software libre no debe haber cabida para las restricciones comerciales y que las obras bajo este tipo de licencias pueden ser vendidas a cualquier precio (GNU, 2015). A partir de las soluciones y ventajas que ofrecen los software libres son muchos los países que han migrado hacia su uso, y un ejemplo clave lo constituye su aplicación en el sector público, algunos ejemplos son los siguientes: Alemania: en el año 2009 el gobierno de Munich publica la migración completa al formato de archivos ODF (documento abierto). Además utilizan el formato PDF para contenido no editable. Estos cambios van desde conversión de plantillas hasta macros y aplicaciones web. Es importante recalcar que Alemania se encuentra entre uno de los principales países que utilizan software libre en Europa, tanto en el gobierno como en universidades, ejemplo de esto es el proyecto Open Source and Green IT, donde se destinaron más de 500 millones de euros al proyecto (SomosLibre, 2015). Perú: el gobierno peruano aprobó una ley que plantea que las instituciones y empresas del Estado emplearan prioritariamente software libre en sus planes de educación, equipamiento de informática, sistemas y proyectos, garantizando la estandarización en uso de formatos abiertos, la interoperatividad interinstitucional en los procesos de intercambios de datos, la información y documentos en los órganos y entes del Estado que integren todos los sectores del gobierno (Gutiérrez Cóndor, 2013). Brasil: es muy importante destacar la participación de Brasil, como uno de los principales promotores de software libre en el continente americano y en el mundo. Brasil migró la gran mayoría de las áreas del gobierno a software no privativo. Estos importantes cambios se iniciaron desde las entrañas del país con sus distintos estados, producto de las.
(18) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 9. DE CONTROL. aprobaciones de ley respecto al uso de software libre. Además, como en la mayoría de los países, el surgimiento de proyectos como el proyecto software libre Brasil ha jugado un papel muy importante en la migración y originado en la población un cambio en su manera de pensar; con el ahorro económico de millones de euros. Un ejemplo del avance de Brasil en el mundo del licenciamiento libre es el portal público del gobierno, donde las distintas instituciones gubernamentales pueden interactuar con las aplicaciones que el portal ofrece, además se han creado importantes comunidades de desarrollo de distintas aplicaciones (educativas, atención al público, etc.) (Torres Solórzano, William, Luis, & Murillo, 2010).. Inglaterra: en una búsqueda por recortar el déficit presupuestario, el gobierno inglés realizó una encuesta a 56000 empleados de la administración pública para obtener sugerencias y alternativas para lograrlo. A partir de los resultados de este estudio, surgió el proyecto de migración de los sistemas de información a alternativas open source. El Ministro para el Compromiso Digital inglés opina que el software libre fue uno de los grandes acontecimientos culturales en tecnología informática e incluso más allá de la misma en las últimas dos décadas, demostrando que las personas trabajando en cooperación mediante una red como Internet pueden crear productos que reemplazan a los de las grandes empresas como Microsoft, Apple, etc. (SomosLibre, 2015). 1.2.1 Aspectos importantes para la migración a software libre Aunque el software libre presenta numerosas ventajas a las diferentes clases de usuarios, la migración hacia el mismo debe ser de manera parcial. Un cambio brusco no sería bien recibido debido a varios factores que atentan contra la migración, como son: . Falta de software libre con capacidades y funcionalidades que puedan ser equivalentes a programas propietarios, algunas veces es necesario el uso de más de un software libre para hacer algo que hace un software propietario. . Ignorancia sobre la libertad digital que ofrece el software libre y las posibilidades que esto brinda para la investigación y superación personal. . Escasez de cursos locales para la capacitación.
(19) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 10. DE CONTROL. . Dificultad de uso de algunos programas en software libre pues al estar acostumbrados a Windows y su interfaz gráfica muchas veces se llega al software libre y lo que se encuentra para trabajar son consolas. Ante las dificultades anteriores la mejor alternativa es trazar un plan o guía a partir de las distintas situaciones y características del ambiente donde se va a realizar la migración. Unas de las guías más usadas es la Migración Piloto e Implantación que se sugiere en la Guía del Proyecto Source Pyme (Sáez & Peris, 2007) Esta estrategia es recomendable para lugares que tengan un número considerable de PC (Personal Computer). Primeramente se plantea la migración de un grupo reducido de PC que bien pudiese ser un laboratorio de estudiantes. A estas PC se les instala tanto el sistema operativo GNU/Linux como todas las aplicaciones libres propuestas, de modo que permita evaluar cuáles de las aplicaciones se quedan o determinar si algún software propietario no es sustituible, pues ninguna aplicación libre tiene la capacidad de suplirlo. Esta guía señala que los software libres que se van a implantar deben poseer un entorno gráfico y una funcionalidad muy parecida al software privado que se va a sustituir. Esto propicia que la migración sea lo menos radical posible para los usuarios que interactúan con estos software. El tiempo necesario para poder realizar esta evaluación debe ser lo suficientemente largo de modo que permita comprobar todas las aplicaciones que se utilizan en el plan de estudio y el funcionamiento de la manera esperada de las mismas; este método tiene la ventaja de que permite hacer evaluaciones y correcciones en la etapa piloto. Si en esta etapa no se hacen correctamente las correcciones pueden ocurrir problemas ya avisados en la etapa de implantación. La segunda etapa de la estrategia es la Implantación que se lleva a cabo una vez que se comprueba el éxito de la prueba piloto; en esta fase ya se tiene definido cuales son los software que se quedan y cuáles no, se conocen todos los problemas a los que los usuarios se pueden enfrentar y finalmente se hace extensible la migración a todos los equipos disponibles..
(20) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 11. DE CONTROL. 1.2.2 Software libre en la educación Siempre que se mencione software libre en la educación, es necesario enfocarlo bajo el concepto de Tecnología Educativa (Chavarría, 2005) lo cual se entiende como la adaptación, acceso ilimitado e irrestricto y utilización de las tecnologías de la información y la comunicación (TIC) en los diferentes momentos del proceso educativo. Según Richard Stallman, en el ámbito de la educación el software libre permite transmitir valores importantes como son compartir, colaborar, ayudar, además permite aprender (R. Stallman, 2004). La principal función de la educación es la de brindar acceso al conocimiento. El software libre brinda libertades para poder ejercer esa apropiación del conocimiento y por ello tiene una gran cantidad de beneficios para la educación comparados con el software privativo, entre ellos se encuentran: Reduce costos de equipos: la ventaja del software libre en relación con el hardware es que no requiere equipos tan potentes y es posible que funcione en la mayoría de las computadoras que existen en el mercado. Reduce costos de licencias: las licencias del software libre son completamente gratuitas, por lo que las escuelas pueden ahorrar dinero e invertirlo en otras áreas. Crea comunidades para compartir conocimiento: al compartir material educativo libre se comparte conocimiento y forman comunidades de aprendizaje en las que se valoran las experiencias de éxito. Crea personas libres, independientes y críticas: el uso de programas con licencia gratuita elimina la dependencia y ofrece libertad para elegir el programa que más agrade al usuario y que mejor se adapte a sus necesidades. A partir de los beneficios que trae consigo el uso de software libre para la educación muchas son las experiencias que se pueden citar, entre ellas se encuentran: . Gleducar: es una comunidad educativa libre que apoya la idea de compartir conocimiento. A través de su página web (http://gleducar.org) se dan a conocer algunas actividades relacionadas con la educación y software libre en general. En esta comunidad se utilizan y promueven las tecnologías libres (herramientas tecnológicas.
(21) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 12. DE CONTROL. que puedan emplearse sin ninguna restricción y ser desarrolladas conjuntamente por la comunidad libre, como el código abierto, hardware y electrónica libre, formatos abiertos y protocolos libres) dentro de un marco de Innovación Pedagógica, que se refiere a cambiar el modelo de aprendizaje desde algunos puntos específicos como la teoría del aprendizaje constructivista, la pedagogía crítica y la Educación Popular (Torres Solórzano et al., 2010). . Qimo, Edubuntu, Skolelinux, TuxPaint: distribuciones de sistemas operativos GNU/Linux diseñados especialmente para niños y niñas, así como herramientas de software para el aprendizaje de las matemáticas a través del juego, elaborar dibujos con el uso de la computadora, entre otras.. . Edusol: encuentro de Educación, Cultura y Software Libres, realizado anualmente en línea, con participación de docentes, especialistas y activistas de toda América Latina y España (Díaz, 2011).. . Celestia: programa de simulación de un planetario, de fácil comprensión. Se estimula la construcción de conocimiento acerca del sistema solar y es ideal para los trabajos de educación científica que se les proporciona a los niños en las escuelas (Peña Parra, 2013). Lo que puede aportar el software libre en las escuelas y en la sociedad, según como se introduzca, es otro modelo cultural y tecnológico, otra manera de entender la relación entre las personas, el conocimiento y las herramientas digitales. El software libre puede adaptarse a las necesidades docentes; por ejemplo, modificarse para ofrecer a los alumnos una versión simplificada, o dar una apariencia adecuada a los conocimientos del alumno (por ejemplo, similar a la de las herramientas con las que el alumno está familiarizado).. 1.3. Software libre en las universidades. Según Stallman, las universidades tienen una responsabilidad y unos intereses mucho más amplios que una empresa o un particular cuando adquiere tecnologías de la información (R. Stallman, 2004). Son las principales fuentes de investigación y divulgación del conocimiento; sin embargo muchas de ellas se enfrentan a problemas y/o situaciones.
(22) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 13. DE CONTROL. económicas en cuanto a licencias y patentes para uso, mantenimiento y actualización de software imprescindibles para la enseñanza e investigación. Una buena solución a esta problemática es el uso de software libre, ya que los proyectos donde este se use, su costo inicial es muy bajo, se puede construir sobre el trabajo de otros proyectos y explorar sus aplicaciones educativas (por ejemplo, al integrar herramientas que originalmente no fueron diseñadas con propósito educativo como blogs y wikis) (Adell & Bernabé, 2007). Por otra parte, la universidad cumple con una función de servicio público. Este es un motivo determinante para respetar e impulsar los estándares abiertos. No hacerlo supone favorecer a un determinado fabricante y a sus clientes, discriminando al resto de los usuarios. La universidad debe garantizar la privacidad de los datos de los particulares. Sin acceso al código fuente es imposible saber qué hace una aplicación con estos datos y cómo son tratados. El software libre ofrece una transparencia total y le permite llevar a cabo sus propias auditorías de seguridad sobre el software (García & Cuello, 2007). Un ejemplo clave que cumple con todo lo anterior lo constituye la plataforma Moodle (Ros Martínez de Lahidalga, 2008) la cual es un ambiente educativo virtual y sistema de gestión de cursos de distribución libre que proporciona múltiples módulos que permiten la interacción de los profesores con los estudiantes, lo que rompe la linealidad pupitredocente. A partir de lo anterior, muchas universidades del mundo apuestan cada día más por el software libre como es el caso de la Universidad de Tarapacá en Chile (Escobillana, 2009) y La Universidad del País Vasco en España (Bruno González, 2009). 1.3.1 Software libre en la Universidad Central “Marta Abreu” de Las Villas Actualmente, en la Universidad Central “Marta Abreu” de las Villas el software libre gana cada día más terreno y ya se encuentra diseminado en distintas aplicaciones y servicios (González Vázquez, 2009; Gónzalez Vázquez, 2010); muestra de ello son: el uso de Apache en los servidores Webs de la universidad y de la plataforma Moodle en todas las carreras, la intranet está completamente montada sobre software libre, existen grupos como.
(23) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 14. DE CONTROL. el Grupo de Redes, el sistema de mensajería Jabber y proyectos que se realizan en colaboración con el CRAI (Centro de Robótica y Automatización Integral). 1.3.2 Software libre en la carrera Ingeniera en Automática de la UCLV La Ingeniería en Automática es una carrera con buenos resultados académicos e investigativos, sin embargo, enfrenta las restricciones de algunos software privados, lo cual influye en la preparación docente de los alumnos y en el desarrollo de proyectos. A partir de esta problemática y de la orden de Ministerio de Informática y Comunicaciones para migrar paulatinamente todos los software privados que se usen en el país hacia software libre (MIC, 2007; Pérez-Villazón et al., 2013) se realizó una propuesta para migrar hacia software libre los distintos software privados que dan soporte a las distintas asignaturas (Victor, 2009). Aunque no se haya llevado a cabo completamente dicha propuesta de migración, ya son varios los software libres que hoy en día se usan en algunas disciplinas, por ejemplo: Eclipse y Qt para las disciplinas de Computación y Programación respectivamente. 1.4. Software libre alternativos a Matlab. Como se explicó anteriormente, Matlab es el mejor software para dar soporte a las distintas asignaturas de la Disciplina Sistemas de Control; sin embargo, ante los problemas que trae para Cuba su adquisición y uso, es necesario buscar alternativas para sustituirlo. Como se ha expuesto, una buena solución es el uso de un software libre que tenga alta capacidad de procesamiento numérico y que posea herramientas similares a las de Matlab para el análisis y diseño de sistemas de control. Los software que cumplen con los requisitos planteados son: GNU Octave, FreeMat y Scilab (Sharma & Gobbert, 2010). 1.4.1 GNU Octave GNU Octave es un software para realizar cálculos numéricos. Como su nombre indica, forma parte del proyecto GNU, por tanto entra en la categoría de software libre. Muchos usuarios lo consideran la alternativa libre a Matlab debido a que el mismo tiene una sintaxis muy similar con Matlab (Brewster & Gobbert, 2011). Entre otras características que.
(24) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 15. DE CONTROL. comparten, se puede destacar que ambos usan varias bibliotecas en común y además ofrecen un intérprete, lo que permite ejecutar órdenes en modo interactivo. El proyecto fue creado alrededor del año 1988, pero con una finalidad diferente: ser utilizado en un curso de diseño de reactores químicos. Posteriormente, en el año 1992, se decidió extenderlo y comenzó su desarrollo a cargo de John W. Eaton. La primera versión alpha fue lanzada el 4 de enero de 1993. Un año más tarde, el 17 de febrero de 1994, apareció la versión 1.0. El nombre surge de Octave Levenspiel, profesor de uno de los autores y conocido por sus buenas aproximaciones, por medio de cálculos mentales, a problemas numéricos en ingeniería química (Eaton, Bateman, & Hauberg, 2007). Los principales detalles técnicos de GNU Octave son: está escrito en C++ usando la biblioteca STL2; tiene un intérprete de su propio lenguaje (de sintaxis casi idéntica a Matlab) y permite una ejecución interactiva o por lotes. Su lenguaje puede ser extendido con funciones y procedimientos, por medio de módulos dinámicos. Utiliza otros programas GNU para ofrecer al usuario soporte para crear gráficos y luego imprimirlos o guardarlos (Grace). El lenguaje también se comporta como una consola de órdenes (shell) esto permite, por ejemplo listar contenidos de directorios. Además de correr en plataformas Unix también lo hace en Windows. Puede cargar archivos con funciones de Matlab (reconocibles por la extensión .m). En cuanto a las características del lenguaje de GNU Octave es necesario resaltar que no permite pasar argumentos por referencia, siempre son pasados por valor. No permite punteros. Se pueden generar scripts. Soporta gran parte de las funciones de la biblioteca estándar de C. Puede ser extendido para ofrecer compatibilidad con las llamadas al sistema UNIX. El lenguaje está pensado para trabajar con matrices y provee mucha funcionalidad para trabajar con éstas.. 2. STL: Standard Template Library, serie de bibliotecas de funciones integradas para la manipulación de datos a nivel más. básico. Proporciona una serie de plantillas (templates) para lenguajes de programación C/C++..
(25) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 16. DE CONTROL. 1.4.2 FreeMat FreeMat es un programa para el procesamiento de datos numéricos usados en ingeniería e investigación. Es similar a Matlab de Mathworks, pero es de código abierto. Al igual que GNU Octave está disponible totalmente gratis bajo la licencia GPL. Además de soportar muchas funciones de Matlab y algunas funciones IDL3 (Interface description language) cuenta con una interfaz externa de código para procesar archivos desarrollados en los lenguajes de programación en C, C++ y Fortran. Incluye desarrollo de algoritmos paralelo/distribuidos con la Interfaz de Paso de Mensajes llamada MPI y provee buena visualización de gráficos en 2D y 3D. Inicialmente fue desarrollado y distribuido bajo una licencia del MIT (Instituto Tecnológico de Massachusetts) y actualmente por uno de los grupos de Google (Brewster & Gobbert, 2011; Sharma & Gobbert, 2010). En cuanto a las principales potencialidades de este software se puede destacar: manipulación de arreglos de 6 dimensiones, soporte para manipulación de datos tipo integer de 8,16,32 bit (con o sin signo) para datos de 32 y 64 bit tipo flotantes y para datos de 64 y 128 bit de tipo complejo. Cuenta con soporte para la solución de sistemas de ecuaciones lineales; provee, además, control de estructura de código (for, while, break, continue, etc.) y cuenta con arreglos de tipo heterogéneos (llamados “cell arrays” en Matlab). 1.4.3 Scilab Scilab es un software matemático, con un lenguaje de programación de alto nivel, para cálculo científico, interactivo, de libre uso y disponible en múltiples sistemas operativos (Mac OS X, GNU/Linux, Windows) iniciado por INRIA (Instituto Nacional de Investigación en Informática y Automática) y la ENPC (Escuela Nacional de puentes y Calzadas) desde 1990. Actualmente es desarrollado por Scilab Enterprises (Enterprises, 2012) y distribuido bajo la patente CeCill (Vidal, 2008) la cual cumple con los principios. 3. IDL es un lenguaje de informática utilizado para describir la interfaz de componentes software.
(26) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 17. DE CONTROL. de la licencia GNU GPL establecidos por la Fundación de Software Libre (R. M. Stallman & Manual, 1986). Fue creado para hacer cálculos numéricos y algunos cálculos simbólicos como derivadas de funciones polinomiales y racionales. Posee cientos de funciones matemáticas y la posibilidad de integrar programas en los lenguajes más usados (Fortran, Java, C y C++). Scilab fue hecho para ser un sistema abierto donde el usuario puede definir nuevos tipos de datos y operaciones entre los mismos. Posee numerosas herramientas: gráficos 2-D y 3-D, animación, álgebra lineal, matrices dispersas, polinomios y funciones racionales, así como simulación de programas de resolución de sistemas de ecuaciones diferenciales explícitas e implícitas. Scilab incluye un simulador de diagramas en bloques (Xcos) el cual se usa para sistemas dinámicos híbridos, control clásico, control robusto, optimización LMI, optimización diferenciable y no diferenciable, tratamiento de señales, grafos y redes (Brewster & Gobbert, 2011; Sharma & Gobbert, 2010). Cuenta además con Scilab paralelo que emplea PVM (máquina virtual paralela), procesamiento estadístico, creación de GUIs, una interfaz para el cálculo simbólico usando Maple y MuPAD4, así como una interfaz con lenguaje de herramientas de comando TCL5 y TK6. Además se pueden agregar numerosas herramientas o toolboxes hechas por los usuarios, por ejemplo de ellos la herramienta Open FEM (una caja de Herramientas para Elementos Finitos) hecha por INRIA.. 4. 5. MuPAD: es un programa comercial de álgebra computacional que forma parte del software matemático Matlab... TCL es un lenguaje de script que se utiliza principalmente para el desarrollo rápido de prototipos, aplicaciones "script",. interfaces gráficas y pruebas.. 6. Tk es una aplicación libre multiplataforma y un conjunto de controles (widget toolkit). Es una biblioteca de elementos. básicos para construir una interfaz gráfica de usuario (GUI)..
(27) CAPÍTULO 1. ESTUDIO DE SOFTWARE EN LA ENSEÑANZA DE LA DISCIPLINA SISTEMAS. 18. DE CONTROL. Las últimas versiones de Scilab permiten procesar e interactuar datos con el medio exterior. Se pueden construir interfaces para que desde Scilab se maneje un dispositivo, se conecte a la red a través de TCP7 (Protocolo de Control de Transmisión) o UDP8 (User Datagram Protocol), etc. Esto brinda la posibilidad de conectar una placa de adquisición de datos a Scilab y de esta forma el control de una planta on-line (Enterprises, 2012). 1.5. Apreciaciones del capítulo.. A partir de la revisión bibliográfica, en este capítulo se aprecia que el software libre es hoy un movimiento que se desarrolla de forma sólida y que distintos países y organizaciones lo han asumido como una ventaja sustancial. Por tanto, se puede afirmar que este tipo de software es una buena opción para darle solución a la problemática que trae consigo el uso del software privado Matlab en las acividades prácticas de la Disciplina Sistemas de Control. Entre las principales alternativas para sustituir a Matlab se proponen los software libre: FreeMat, GNU Octave y Scilab. En el capítulo dos se estudiarán estos software y se escogerá el adecuado como soporte a las prácticas de las distintas asignaturas de la disciplina antes mencionada.. 7. TCP: Transmission Control Protocol es uno de los protocolos fundamentales en Internet. garantiza que los datos serán. entregados en su destino sin errores y en el mismo orden en que se transmitieron.. 8. UDP: User Datagram Protocol es un protocolo del nivel de transporte basado en el intercambio de datagramas. (Encapsulado de capa 4 Modelo OSI)..
(28) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 19. CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. Introducción En este capítulo serán comparados los software libre FreeMat, GNU Octave y Scilab. Esta comparación tiene el objetivo de evaluar cuál de estos software tiene más características en común con Matlab como software usado en las actividades prácticas de la Disciplina Sistemas de Control. Luego se hará un resumen de las distintas asignaturas que forman el currículo base de esta disciplina y de los requisitos que cumple Matlab para dar soporte a las mismas; además se analizará si el software libre escogido cumple con dichos requisitos. 2.1 Software libre en la Disciplina Sistemas de Control En el capítulo anterior se presentaron tres software libres con alto nivel de procesamiento matemático que son alternativos a Matlab. Para dar cumplimiento al objetivo principal de este trabajo es necesario evaluar la capacidad de los mismos como soporte a las asignaturas de la Disciplina de Sistemas Control. Los software FreeMat, GNU Octave y Scilab poseen numerosas herramientas para el análisis matemático, representación de gráficos 2D y 3D, trabajo con matrices, solución de ecuaciones diferenciales y muchas otras que son imprescindibles en el análisis y diseño de sistemas de control. Sin embargo, es necesarios comparar estos software teniendo como referencia las potencialidades y ventajas que presenta Matlab como soporte a los sistemas de control..
(29) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 20. 2.2 Comparación entre software libres para su uso en la Disciplina Sistemas de Control. Normas de calidad Para comparar y/o evaluar software existen varios métodos y normas establecidas a nivel mundial (Estayno, Dapozo, Cuenca Pletsch, & Greiner, 2009). La norma ISO/IEC 9126 permite especificar y evaluar la calidad del software desde diferentes criterios asociados con adquisición, requerimientos, desarrollo, uso, evaluación, soporte, mantenimiento, aseguramiento de la calidad y auditoria de software (Jung, Kim, & Chung, 2004). El estándar ISO/IEC 25000:2005 plantea que lo más importante en el desarrollo de software es la calidad del producto y del proceso. Esta norma proporciona una guía para el uso de las nuevas series de estándares internacionales, llamados Requisitos y Evaluación de Calidad de Productos de Software (SQuaRE) que constituyen una serie de normas basadas en la ISO 9126 y en la ISO 14598; y su objetivo principal es guiar el desarrollo de los productos de software con la especificación y evaluación de requisitos de calidad (ISO/IEC, 2005). El Modelo QSOS permite la cuantificación y calificación de software Open Source. Esta herramienta está orientada exclusivamente al producto de software. Consiste en cuatro pasos fundamentales: definir los marcos de referencias que se usarán en los pasos del proceso; evaluar el software en cuanto a su cobertura funcional, riesgos del usuario y riesgos del proveedor de servicios, así como calificar los aspectos anteriores a partir de los requerimientos de usuario. y/o estrategia escogida por el proveedor de servicios;. seleccionar el software a partir del procesamiento de los datos encontrados en los pasos anteriores (Deprez & Alexandre, 2008). El modelo MOSCA (Modelo Sistémico de Calidad) consta de cuatro niveles: dimensiones, categorías, características y las métricas, todos sobre la base de tres ramas: el producto, el proceso, y la parte humana. Contiene un total de 715 métricas (Mendoza, Pérez, & Grimán, 2005). Los métodos y/o normas citados anteriormente propician un análisis exhaustivo para elegir el mejor software de acuerdo con los requisitos planteados por una empresa, compañía o un grupo de usuarios. Sin embargo, para el presente trabajo no es conveniente aplicar completamente uno de los modelos planteados anteriormente, debido a que son muy extensos y hay que cumplir con muchos aspectos para poder llegar a una conclusión. Para.
(30) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 21. dar solución a esta situación, los aspectos para comparar dichos software son propuestos por parte de los profesores expertos de la Disciplina Sistema de Control de la carrera Ingeniería en Automática de la UCLV. A partir del criterio y la experiencia de dichos docentes se propone un conjunto de criterios de evaluación que coinciden en gran medida con algunos aspectos de la norma ISO/IEC 9126, que es una de las más utilizadas (Antonellis et al., 2007; Jung et al., 2004). Los aspectos de la norma ISO/IEC 9126 son: Funcionalidad: capacidad del software de cumplir y proveer las funciones para satisfacer las necesidades explícitas e implícitas cuando es utilizado en condiciones específicas. . Usabilidad: capacidad del software de ser entendido, aprendido y usado en forma fácil y atractiva. La usabilidad está determinada por los usuarios finales y los usuarios indirectos del software, dirigidos a todos los ambientes, a la preparación del uso y al resultado obtenido.. . Eficiencia: es la forma del desempeño adecuado, de acuerdo al número de recursos utilizados según las condiciones planteadas. Se deben tener en cuenta otros aspectos como la configuración de hardware y el sistema operativo, entre otros.. Los profesores expertos proponen como primer aspecto de comparación la similitud del código de estos software y el código de Matlab. Esto es de gran importancia, ya que contribuye a que la migración hacia uno de estos programas no sea tan radical y así los usuarios puedan adaptarse fácilmente a los mismos. Otro aspecto de comparación es la similitud de la interfaz gráfica de usuario, conocida también como GUI (del inglés Graphical User Interface) y de las opciones de accesibilidad de la misma. Este aspecto, al igual que el anterior, aumenta el grado de compatibilidad entre Matlab y los software libres mencionados, propiciando que los usuarios se sientan familiarizados con el uso de los mismos. Por otra parte, y mucho más importante para la evaluación de estos programas como alternativas a Matlab para el desarrollo de las prácticas de las asignaturas de dicha disciplina, se propone comparar estos tres software en cuanto a: eficiencia, la cantidad de funciones que contengan para el diseño de sistemas de control asistido por computadora y.
(31) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 22. la posibilidad de un ambiente gráfico para la simulación de sistemas de control lo más parecido al Simulink. A continuación se hará la comparación de los tres software en los aspectos mencionados: Similitud en el código: como ya fue planteado, este aspecto es de gran importancia para la migración hacia uno de estos software. De forma general la sintaxis más parecida a Matlab la posee el software GNU Octave, el cual puede incluso procesar los archivos con la extensión .m de Matlab. FreeMat también posee una sintaxis en el código muy parecida a la de Matlab, incluso muchas funciones son iguales para ambos programas. En el caso de Scilab, la sintaxis difiere un poco a la de Matlab; no obstante, hay muchas funciones que son iguales para ambos programas y además, Scilab posee una herramienta para convertir los archivos con la extensión .m de Matlab a la extensión .sce de Scilab Eficiencia: este aspecto coincide con el de la norma ISO/IEC 9126. Específicamente se utiliza el criterio de comportamiento de tiempos, el cual se refiere a los tiempos adecuados de respuesta y procesamiento, o sea el rendimiento cuando realiza su función en condiciones específicas. Para aplicar este criterio comparativo a los software libres FreeMat, Octave y Scilab se hizo la siguiente prueba en una computadora que tiene como sistema operativo Windows 8.1 y posee un hardware con un procesador Intel Celeron N2840 2.16 GHz y una memoria RAM de 4GB: Se declara una matriz aleatoria de 1000 filas y 1000 columnas, se invierte dicha matriz, el resultado se multiplica por la matriz original y a la matriz resultante se le halla la suma de sus elementos diagonales. Una vez realizada esta operación se repite tres veces y se miden los tiempos que tardó en desarrollarse. Este parámetro dará una idea del potencial de cómputo de cada software. De forma general la instrucción es igual para los tres software y queda de la manera siguiente: tic; A = rand(1000,1000);Ai = inv(A);trace(A*Ai);toc; Una vez ejecutada esta instrucción se obtuvieron estos resultados: GNU Octave 1.218; 1.156; 1.219 segundos. Scilab: 4.61; 4.56; 4.55 segundos..
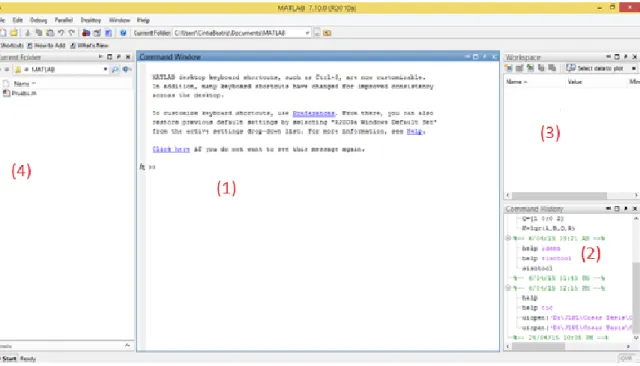
(32) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 23. FreeMat: 33.22; 32.095; 32.111 segundos. Similitud con la GUI de Matlab: para comparar la similitud de la interfaz gráfica de usuario se expone la ventana principal de Matlab y la de cada software libre propuesto; además se señalan los principales tópicos de cada una de ellas. Los principales tópicos de las GUIs son: 1-Consola de ejecución (donde se solicita la ejecución de comandos). 2-Diario o historial de comandos ejecutados. 3-Tabla de variables definidas. 4- Navegador de carpetas. En la figura 2.1 se muestra el entorno de trabajo de Matlab v7.10 y la localización de sus ventanas principales.. Figura 2.1 Interfaz de Matlab 7.10 con sus principales tópicos. En la figura 2.2 se muestra la interfaz QtOctave y los principales aspectos de la misma. En el caso de GNU Octave es necesario aclarar que actualmente este software no posee interfaz gráfica de usuario propia, el mismo se auxilia de una aplicación desarrollada en Qt llamada “QtOctave” que sirve como interfaz gráfica para dicho software..
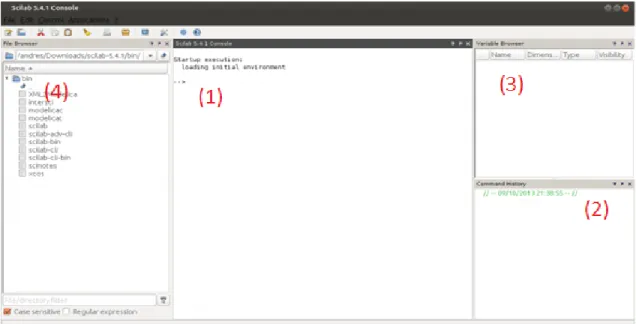
(33) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 24. Figura 2.2 Interfaz QtOctave para GNU Octave. En la figura 2.3 se muestra la interfaz principal de Scilab v5.5.1 y se señalan los tópicos ya mencionados.. Figura 2.3 Interfaz principal de Scilab v5.5.1.
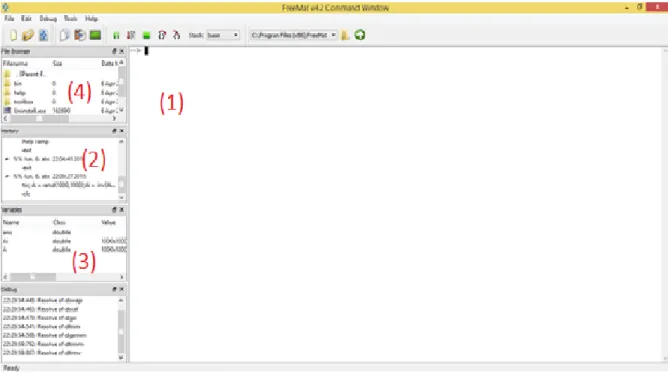
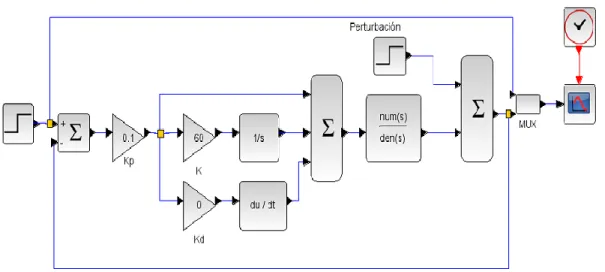
(34) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 25. En la figura 2.4 se muestra la interfaz gráfico de usuario del software FreeMat v4.2 con los tópicos principales de la misma.. Figura 2.4 GUI del software FreeMatv4.2. Como se puede apreciar, la GUI más parecida a la de Matlab la posee Scilab. Estas dos interfaces gráficas coinciden en cuanto a la apariencia y funcionalidad de los distintos tópicos que hay en las mismas. Entorno de simulación para diagramas de bloques: la finalidad de este aspecto de comparación es comprobar si alguno de los tres software en cuestión posee alguna herramienta gráfica para la simulación de sistemas de control lo más parecida a Simulink. El único software que tiene dicha herramienta es Scilab, llamada Xcos, la cual posee la mayoría de los bloques que contiene Simulink para simular los sistemas de control. En la figura 2.5 se presenta un diagrama en bloques de un Sistema de Control simulado con Xcos..
(35) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 26. Figura 2.5 Simulación de un Sistema de Control con Xcos. Funciones implementadas para diseño de sistemas de control: lo que se persigue con este criterio de comparación es evaluar cuál de los tres software libre planteados posee algún toolbox o paquete de funciones lo más parecido al Control System Toolbox de Matlab. El software Freemat no posee ningún paquete de funciones específicas dedicadas al diseño de sistemas de control; el software GNU Octave tiene la posibilidad de agregar un paquete de funciones para el diseño de sistema de control, pero tiene varios inconvenientes, entre ellos están que es compatible únicamente con las últimas versiones de este programa y además carece de muchas funciones imprescindibles. En el caso de Scilab, este software posee un toolbox en el que se integran un gran número de funciones dedicadas explícitamente al diseño de sistemas de control asistido por computadora. En la tabla 2.1 se muestra la evaluación de estos tres software a partir de los aspectos analizados. La evaluación se basa en una escala Likert de 1 (mínimo) a 5(máximo). Aspectos. Scilab. Gnu Octave. FreeMat. Eficiencia. 4. 5. 2. Similitud en el código. 4. 5. 4. Similitud en el GUI. 5. 4. 4. Entorno de simulación para diagramas en bloques. 5. -. -. Funciones para diseño de sistemas de control. 4. 3. 2.
(36) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL Evaluación. 22. 17. 27. 12. Tabla 2.1 Evaluación de FreeMat, GNU Octave y Scilab. A partir de los resultados anteriores se puede afirmar que el software libre más adecuado para dar soporte a las prácticas de la Disciplina de Sistemas de Control es Scilab. Este software posee una GUI muy similar a la de Matlab; contiene un toolbox con numerosas funciones dedicadas a la simulación, análisis y diseño de sistemas de control y es el único de los tres software presentados que posee una herramienta muy similar al Simulink, llamada Xcos, la cual es imprescindible en la simulación de sistemas de control continuo y discreto. Por las razones anteriores, muchos profesionales de las distintas ramas de los sistemas de control que han migrado hacia software libre, han elegido desarrollar sus trabajos e investigaciones en Scilab. El autor Barrantes crea un programa sobre la plataforma Scilab 5 que permite identificar modelos a partir de una función de transferencia de cualquier orden de un proceso, al usar los métodos de tres puntos 123c9 y el modelo de primer orden a partir del segundo 1D2u10, que sintonice controladores mediante el uso del método de sintonización analítica robusta para controladores de dos grados de libertad ART2 y que permita el análisis general de los lazos de control (Barrantes Dall’Anese, 2008). Los autores Ñeco y Manchón describen la utilización del software Scilab/Scicos para la resolución de prácticas afines al área de Ingeniería de Sistemas y Automática. El interés del uso de dicho software radica, por una parte, en el uso de un software libre frente a otros paquetes de software comerciales y por otra, por la validez y funcionalidad de dicho software para la realización de prácticas de ingeniería de control (Ñeco García, Puerto Manchón, Ripoll, & Fernández Peris, 2010). Los autores Bazán y Flórez elaboran un artículo donde se explica el diseño, implementación y validación de una plataforma de Prototipado Rápido de Control (o RCP por siglas en inglés) para una planta motor DC. La plataforma RCP consta de hardware y. 9. Método de identificación de uno, dos y tres cuartos de la respuesta temporal del proceso. Método de identificación de modelo de primer orden a partir de un de segundo orden identificado a partir de los parámetros críticos. 10.
(37) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 28. software. El hardware está compuesto por: un PC, tarjeta electrónica, motor DC y sensores y el software basado en herramientas libres como Linux, Scilab / Scicos y RTAI-Lab. La plataforma RCP permite desarrollar prácticas de control de velocidad y posición simuladas y reales, usando diferentes tipos de controladores PID industriales y experimentar fenómenos como Wind Up11 en una plataforma de bajo costo. Se desarrolla una aplicación de control de velocidad organizada en cuatro pasos: identificación, diseño controlador, simulación y control en tiempo real, donde se destacan las ventajas pedagógicas de una plataforma que no solo permite realizar simulación sino también control en tiempo real de una planta motor DC (Bazán-Orobio & Flórez-Marulanda, 2013). 2.3. Análisis de software usado en las asignaturas de la Disciplina Sistemas de Control. Esta disciplina desempeña un papel fundamental en la carrera y sus asignaturas comienzan a desarrollarse desde el primer período del tercer año, donde se imparte Modelado y Simulación. En el segundo período se imparte Ingeniería de Control I. En el primer período de cuarto año se imparten. Ingeniería de Control II, Procesos y Maquinaria. Eléctrica, así como Control de Procesos I y Accionamiento Eléctrico en el segundo período del mismo año. Esta disciplina está estrechamente vinculada con el propio surgimiento de la carrera de Control Automático, existiendo una vasta experiencia de la misma. Su objetivo radica en la aplicación eficiente de los métodos y técnicas para el control de los procesos tecnológicos industriales y los accionamientos eléctricos. La disciplina juega un papel fundamental en la formación del egresado de la carrera, ya que proporciona el sistema de conocimientos y habilidades para enfrentar los problemas más comunes y frecuentes que se presentan en la necesidad de controlar los procesos tecnológicos y accionamientos eléctricos; esto hace que tenga una fuerte incidencia en el Plan de Estudio y un notable carácter integrador de los. 11. Se refiere al efecto que ocurre en un controlador PID feedback al aplicarle cambio significativo en el setpoint. Los términos integrales acumulan un error significativo durante la respuesta..
(38) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 29. conocimientos del resto de las disciplinas, ya que para las aplicaciones prácticas de los sistemas de control se exige un gran dominio de los métodos y técnicas para el Control de Procesos, Instrumentación, Computación, Matemática, así como de los medios técnicos de automatización, lo que exige una constante actualización. El incesante desarrollo tecnológico incide directamente en las técnicas y medios para la automatización, así como en las herramientas para el análisis y diseño de los sistemas de control. A continuación se presenta un resumen de las asignaturas que forman el currículo base de la Disciplina Sistemas de Control: 2.3.1 Modelado y simulación Esta asignatura es la primera de la Disciplina Sistemas de Control, por lo que en ella se introducen los conceptos preliminares para el análisis y diseño de los sistemas de control y se apoyan varias de las asignaturas de la disciplina. Con el objetivo de contribuir a la mejor explotación de los procesos tecnológicos industriales, se le brindan a los egresados de la carrera Ingeniería en Automática, los conocimientos necesarios y el desarrollo de habilidades para la obtención de modelos y la simulación de sistemas, exigiendo dominio tanto de métodos y técnicas analíticas e experimentales de identificación como de algoritmos y productos de computación para la simulación digital de sistemas, básicamente en aspectos relacionados con el control de procesos mecánicos, eléctricos y electromecánicos. En esta asignatura las prácticas de laboratorio se orientan al uso de la red de computadoras de la facultad y el software de simulación disponible en la misma, en particular, el MatlabSimulink, el cual se presenta de forma general como un paquete de software profesional orientado a la simulación. Este paquete contiene bloques imprescindibles para la simulación de sistemas de control, entre los principales bloques están: función transferencial, integrador, derivador, controlador PID, operaciones lógicas y aritméticas, discontinuidades, entradas tipo paso y rampa, retardos, bloques para analizar los resultados de la simulación, entre otros. Por otra parte, para las prácticas del tema Identificación experimental de sistemas, se usa la herramienta ident, la cual forma parte del toolbox llamado System Identification y consiste en un GUI que provee un ambiente interactivo para el análisis de datos, estimación de modelos y visualización de la respuesta..
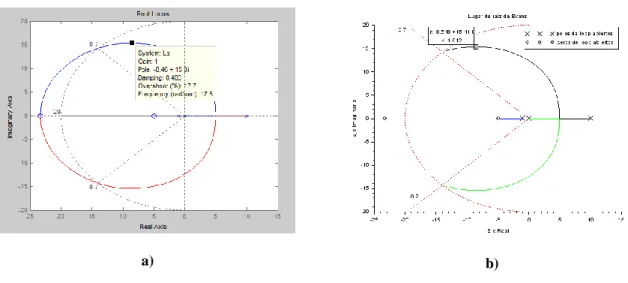
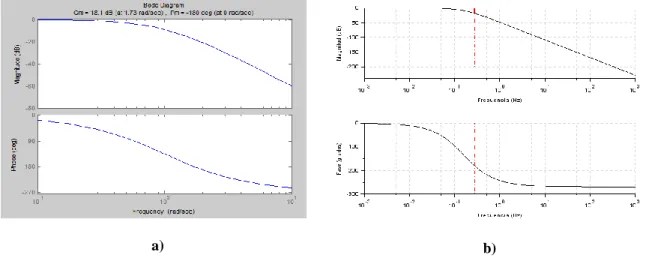
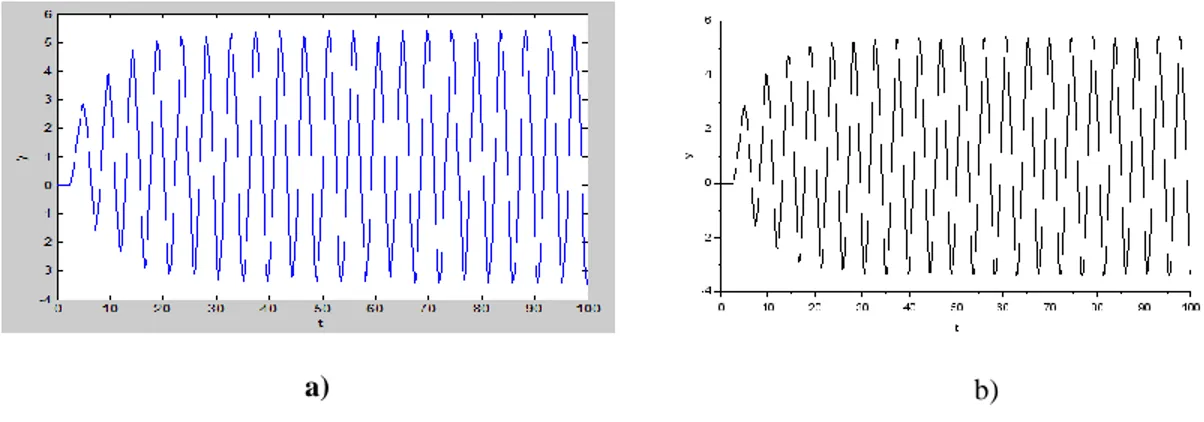
(39) CAPÍTULO 2. ANÁLISIS DE SOFTWARE EN LAS ASIGNATURAS DE LA DISCIPLINA SISTEMAS DE CONTROL. 30. En el caso de Scilab, como se mencionó antes, existe una herramienta llamada Xcos orientada a la simulación de sistemas de control. Este paquete de bloques contiene todos los bloques mencionados anteriormente, los cuales son necesarios para esta asignatura; además, la nomenclatura y la forma de funcionar los mismos es muy similar a la del Simulink. Sin embargo, Scilab carece de una herramienta similar al ident de Matlab. 2.3.2 Ingeniería de Control I La asignatura Ingeniería de Control I proporciona el cuerpo teórico de la disciplina en relación con las leyes y métodos utilizados para el análisis y diseño de los sistemas de control lineales; también se apoya en la asignatura Modelado y Simulación para lograr los objetivos planteados. De forma general tiene los objetivos siguientes: analizar, evaluar y diseñar sistemas de control basados en modelos de simple y mediana complejidad, partiendo de conocimientos de los rasgos más notables de estos, de sus modelos estáticos y dinámicos y de las técnicas de control convencionales de actual empleo; utilizar paquetes de programas profesionales para la simulación y el control de procesos, principalmente Matlab; representar y analizar el comportamiento temporal y de frecuencia de sistemas lineales, continuos y estacionarios; diseñar sistemas de control simples utilizando redes de compensación; modelar, identificar y simular sistemas simples y de mediana complejidad, así como seleccionar esquemas de control y ajustar controladores. En esta asignatura la mayor parte de las prácticas se realizan en los laboratorios de computación con el uso de Matlab, ya que el mismo tiene un toolbox orientado a dar soporte a los sistemas de control (Control System Toolbox), el cual tiene funciones para representar una función de transferencia, el modelo de espacio de estados de sistemas y brinda la posibilidad de convertir una en otra. Posee una función para cerrar el lazo de control y con varias funciones para obtener la respuesta del mismo cuando la entrada es paso, impulso, pulso u otra función que se desee formar; también cuenta con una herramienta para obtener el diagrama de polos y ceros, con el valor numéricamente de los mismos, y con una función para obtener las raíces de los polinomios. Para la obtención del diagrama de Bode y del lugar geométrico de las raíces Matlab tiene funciones específicas que muestran en pantalla los mismos, lo que le permite al usuario obtener toda la información necesaria..
Figure
+7

Documento similar
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
