Kit y cargador para microcontroladores PIC
71
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA. Kit y cargador para microcontroladores PIC. Autor: Yoelvis Domínguez Medina. E-mail: dominguez@uclv.edu.cu. Tutor: MSc. Carlos Alberto Bazán Prieto. Profesor, Dpto de Electrónica y Telecomunicaciones Facultad de Ing. Eléctrica. UCLV. E-mail: cabazan@uclv.edu.cu. Santa Clara 2008 "Año 50 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “El que se ufana de no haber tropezado jamás, es que no ha intentado caminar.”. Rodolfo Gauna.
(5) ii. DEDICATORIA. A mis padres que han sabido encaminarme a lo largo de esta dura faena. A mis abuelos que me han alentado en todo momento y no han permitido que claudique. A esos amigos que han hecho realidad uno de mis grandes sueños..
(6) iii. AGRADECIMIENTOS. Al colectivo docente de la Facultad de Ingeniería Eléctrica de la Universidad Central “Marta Abreu” de Las Villas, por haber puesto todo su empeño en hacer de nosotros excelentes profesionales. A nuestro tutor Carlos Alberto Bazán, por la ayuda y el apoyo brindados. A Mario y Migdalia, sin ellos este sueño no se hubiera materializado.. *** A mis padres y abuelos, aunque algunos no estén presente físicamente estarán guiándome a lo largo de toda mi vida. Al resto de nuestros familiares y amigos que confiaron en mí y me apoyaron incondicionalmente. A todos, gracias..
(7) iv. TAREA TÉCNICA. 1. Revisión crítica de la bibliografía del tema. 2. Estudio del subsistema de comunicación serie en los PICs. 3. Estudio del software de ayuda al diseño. 4. Elaborar una aplicación que emplee el subsistema analizado, aplicado a un Kit y cargador de aplicaciones. 5. Confección y presentación del informe.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En el presente trabajo se muestra un análisis de la Interfaz de Comunicación Serie (SCI) de los microcontroladores PICs. Se hace alusión al software de ayuda al diseño denominado ARES que permite el diseño de circuitos impresos en su versión 7, describiendo sus características y bondades. Por último se realiza el diseño y montaje de un Kit de entrenamiento con el microcontrolador 16F870 que se utilizará como una herramienta más en la simulación y puesta a punto de aplicaciones a utilizar en la docencia. Palabras claves: Microcontroladores PICs, Interfaz de Comunicación Serie (SCI), cargador, Kit..
(9) vi TABLA DE CONTENIDOS PENSAMIENTO ........................................................................................................i DEDICATORIA.........................................................................................................ii AGRADECIMIENTOS ............................................................................................. iii TAREA TÉCNICA ...................................................................................................iv RESUMEN ...............................................................................................................v TABLA DE CONTENIDOS ......................................................................................vi INTRODUCCIÓN .................................................................................................... 1 Organización del informe ................................................................................................2 CAPÍTULO 1. 1.1 1.1.1 1.2. Los microcontroladores PICs. El PIC 16F870. ........................... 3. Características de los microcontroladores PIC. ......................................3 Elección de un PIC para una aplicación específica. .............................5 El microcontrolador 16F870. ......................................................................6. 1.2.1. Principales características del 16F870.....................................................6. 1.2.2. Interfaz de comunicación serie (SCI)........................................................8. CAPÍTULO 2. 2.1 2.1.1. Herramienta de software para el diseño. El ARES. .................. 17. ¿Que es ARES?.........................................................................................17 Características del editor. .........................................................................17. 2.2. Entorno del ARES......................................................................................18. 2.3. Selección y posicionamiento de encapsulados en la ventana de edición de ARES. .......................................................................................21. 2.4. Nombrado de los objetos en ARES. .......................................................23. 2.5. Delimitación del borde de la tarjeta en ARES. ......................................24. 2.6. Facilidades de la edición en bloques en ARES. ...................................25. 2.7. Ruteo en ARES. .........................................................................................26.
(10) vii 2.7.1. Edición de las rutas. ..................................................................................26. 2.7.2. Ruteado automático...................................................................................27. 2.7.2.1 Características del ruteado automático..............................................27 2.7.2.2 Ruteado en una capa simple. ..............................................................28 2.7.2.3 Ruteado de componentes de montaje superficial. ...........................28 2.7.2.4 Ruteado usando múltiples planos. ......................................................28 2.8. Visualización de la tarjeta en 3D. ............................................................29. 2.8.1. Características del visualizador en 3D de ARES..................................30. 2.8.2. Creación de modelos en 3D con ARES. ................................................32. 2.8.3. Tipos de cuerpos de los elementos en 3D de ARES. ..........................34. 2.8.3.1 Cuerpo tipo Extruded (por defecto).....................................................34 2.8.3.2 Cuerpo tipo None. ..................................................................................34 2.8.3.3 Cuerpo tipo Cuboid................................................................................35 2.8.3.4 Cuerpo tipo Axialcylinder. .....................................................................36 2.8.4. Tipo de pines de los elementos en 3D de ARES..................................38. CAPÍTULO 3.. Diseño, programación y montaje del Kit para el PIC 16F870. .. 40. 3.1. Generalidades. ...........................................................................................40. 3.2. Diseño y análisis del hardware. ...............................................................41. 3.2.1. Características generales. ........................................................................41. 3.2.2. Max 232C. ...................................................................................................42. 3.2.3. Fuente de alimentación.............................................................................43. 3.3. Algoritmos y programas. ...........................................................................44. 3.3.1. Descripción de las principales subrutinas y del programa principal. .44. 3.3.2. Formato del fichero INTEL HEXADECIMAL..........................................46.
(11) viii 3.3.3. Comunicación PC-Kit de entrenamiento. ...............................................48. 3.4. Montaje y pruebas. ....................................................................................49. 3.5. Análisis económico. ...................................................................................50. 3.6. Manual de usuario. ....................................................................................50. CONCLUSIONES Y RECOMENDACIONES ........................................................ 52 Conclusiones ..................................................................................................................52 Recomendaciones .........................................................................................................52 REFERENCIAS BIBLIOGRÁFICAS...................................................................... 53 ANEXOS ............................................................................................................... 55 Anexo I. Descripción de los comandos usados. ...................................................55. Anexo II. Código ASCII para caracteres de teclado..............................................56. Anexo III. Diagrama en bloques de la subrutina CONVERSION_WF. ...............57. Anexo IV Diagrama en bloques de la subrutina WEPROM. ................................57 Anexo V. Diagrama en bloques de la subrutina BORRAR...................................58. Anexo VI Diagrama en bloques de la subrutina REPROM. .................................58 Anexo VII Diagrama en bloques de la subrutina LEER. ........................................59 Anexo VIII Diagrama en bloques del programa principal........................................59 Anexo IX Factura de compra de componentes. .....................................................60.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. El microcontrolador es uno de los logros más sobresalientes de la evolución tecnológica que ha experimentado la humanidad. Cada año que pasa se acerca más al centro de nuestras vidas, forjándose un sitio en el núcleo de una máquina tras otra. Evolucionando a mayor velocidad que cualquier otro invento, la capacidad del microcontrolador ha aumentado 10.000 veces en los últimos 25 años. Hoy existen millones de microchips de alguna clase en uso y el número de productos que funcionan en base a uno o varios microcontroladores aumenta de forma exponencial. El mayor atributo del microcontrolador es que puede integrar inteligencia casi a cualquier artefacto. La presencia de subsistemas avanzados capaces de dotar a los microcontroladores de prestaciones cada vez más valiosas hace necesario el dominio y empleo de estos subsistemas en el desarrollo de aplicaciones de creciente complejidad. De lo anteriormente expuesto se desprenden las siguientes interrogantes científicas: ¿Cómo diseñar un Kit de entrenamiento para microcontroladores PICs? ¿Cómo desarrollar el ensamblaje, compilación y puesta a punto de programas utilizando el Kit de entrenamiento diseñado?.
(13) INTRODUCCIÓN. 2. Entre los objetivos del presente trabajo están, el diseño, programación y construcción de un Kit para microcontroladores PICs, que permita poner a punto programas. Hacer un estudio teórico del microcontrolador 16F870. Diseñar un Kit de entrenamiento con el microcontrolador 16F870 que permita la puesta a punto de programas. Para poder lograr el vencimiento de los objetivos planteados se ejecutaron las siguientes tareas: primero, búsqueda bibliográfica y estudio del subsistema de comunicación serie presente en los microcontroladores PICs, para la construcción del Kit; segundo, diseño del Kit utilizando una herramienta de software destacando los pasos a seguir para la utilización correcta de dicha herramienta; tercero: se confeccionó un software que permite la puesta a punto de programas. Organización del informe Este informe se ha estructurado en tres capítulos que tratan las siguientes temáticas: CAPITULO 1: Se analizarán en detalle los elementos básicos referentes a las características de Microcontroladores PICs y el subsistema de comunicación serie de los mismos, para la construcción del Kit. CAPITULO 2: Se realizará el diseño del Kit utilizando la herramienta de software seleccionado, y se destacarán los pasos a seguir para la correcta utilización de dicha herramienta. Se realizará además el montaje real auxiliándose de los resultados obtenidos anteriormente. CAPITULO 3: Este capitulo estará dedicado a la principal aplicación del trabajo, que es un software cargador (bootloader), que permita la puesta a punto de programas, describiendo tanto el hardware como el software..
(14) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. CAPÍTULO 1.. En. este. 3. Los microcontroladores PICs. El PIC 16F870.. capítulo. se. abordan. las. características. generales. de. los. microcontroladores PICs, sus prestaciones fundamentales y sus principales productores. Se describen los aspectos fundamentales a tener en cuenta a la hora de decidirnos por un determinado PIC. para emplearlo en alguna aplicación. específica. Dentro de la amplia gama de microcontroladores PIC se enfatiza en el 16F870 que es un microcontrolador que posee 28 terminales lo cual nos da una amplia posibilidad de interacción con diversos periféricos. Es un PIC de la gama media y se escogió teniendo en cuenta. las condiciones de disponibilidad presente y. fundamentalmente por que este PIC posee el subsistema avanzado de comunicación serie (SCI). 1.1 Características de los microcontroladores PIC. Los microcontroladores PICs son fabricados por una gran variedad de productores a nivel mundial, destacándose cuatro compañías: National, Philips, Motorola y Microchip. Esta última es la más prestigiosa en este renglón. Las características de los PICs producidos por estos gigantes son muy similares así como sus prestaciones. (Segredo, 2006) Una gran cantidad de centros educacionales especializados en ingeniería electrónica, automática o de telecomunicaciones se están dedicando el estudio de los microcontroladores PIC. Ejemplos de ello son la Escuela Superior de Ingenieros. de Sevilla (España), la Universidad de Kent (Reino Unido) y la. Universidad de Oxford (Reino Unido) entre otros. Además de clases presenciales,.
(15) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 4. se publican libros con autoría de profesores, hay presencia en Internet abundante información sobre el tema y existe un gran respaldo técnico por parte de los fabricantes en su mayoría disponible de forma gratuita. Todos estos elementos han conllevado a la popularidad de los microcontroladores PICs y al interés cada vez más creciente en ellos por parte de los seguidores de los últimos avances tecnológicos. (Segredo, 2006) Características que han popularizado el uso de los PICs: 1.. Su costo es comparativamente inferior al de sus competidores.. 2.. Poseen una elevada velocidad de funcionamiento.. 3.. Tienen un juego reducido de instrucciones.. 4.. Los programas son compactos.. 5.. Bajo consumo unido a un amplio rango de voltajes de alimentación.. 6.. Muchas herramientas de software se pueden obtener libremente a través de INTERNET desde Microchip.. 7.. Existen una gran variedad de herramientas de hardware que permiten grabar, depurar, borrar y comprobar el comportamiento de los PIC.. 8.. La gran variedad de modelo de los PIC permite elegir el que mejor responde a los requerimientos de la aplicación.. Los PICs a pesar de su reciente aparición ocupan posiciones de primera línea en el ranking mundial, existiendo una gran competencia con otros microcontroladores producidos por gigantes como Intel y Motorola. Los PICs actuales vienen con una amplia gama de mejoras de hardware incorporadas: 1. Núcleos de UCP de 8/16 bits con Arquitectura Harvard modificada. 2. Memoria Flash y ROM disponible desde 256 bytes a 256 Kbytes. 3. Puertos de E/S (típicamente 0 a 5,5 voltios). 4. Temporizadores de 8/16 bits. 5. Tecnología Nanowatt para modos de control de energía..
(16) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 5. 6. Periféricos serie sincrónicos y asincrónicos: USART, AUSART, EUSART. 7. Conversores analógico/digital de 10-12 bits. 8. Comparadores de tensión. 9. Módulos de captura y comparación PWM. 10. Controladores LCD. 11. Periférico MSSP para comunicaciones I2C, SPI, y I2S. 12. Memoria EEPROM interna con duración de hasta un millón de ciclos de lectura/escritura. 13. Periféricos de control de motores. 14. Soporte de interfaz USB. 15. Soporte de controlador Ethernet. 16. Soporte de controlador Irda. 17. Otros. (Wikipedia, 2007). 1.1.1 Elección de un PIC para una aplicación específica. Producto de la gran variedad existente en el mundo de microcontroladores es difícil escoger el adecuado para un diseño concreto. Estaríamos en un error si habláramos del mejor microcontrolador, en cada aplicación son las características específicas quienes determinan el más adecuado. (Bazán, 2006) Las características fundamentales que nos permiten escoger una u otra opción son: a. Sencillez de manejo. b. Buena información. c. Precio. d. Buen promedio de parámetros: - Velocidad. - Consumo. - Tamaño..
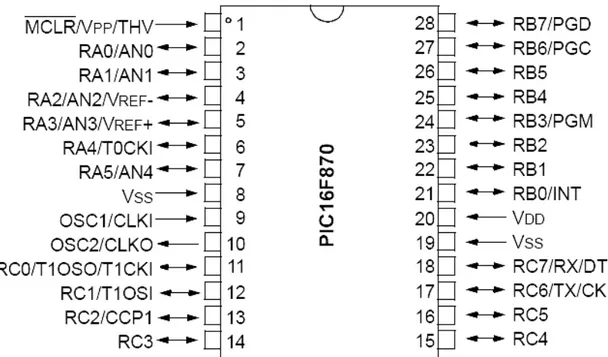
(17) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 6. - Alimentación. - Código compacto. e. Herramientas de desarrollo fáciles y baratas. f. Diseño rápido. (Angulo y Angulo, 1999). También podemos manejar otros criterios entre los que tenemos: 1. Longitud de palabra: 4 bits es apropiado para algunas aplicaciones pero lo limitan consideraciones de costo, 8 bits resulta satisfactorio en casi todos los casos en tanto que 16 y 32 bits se reservan para aplicaciones con gran necesidad de direccionamiento. 2. Periféricos: El diseñador debe conocer las operaciones necesarias y si estas estarán dentro o fuera del microcontrolador, la cantidad de bits necesarios en el periférico es quien decide los bits en el microcontrolador. 3. Costo: Los microcontroladores de 4 bits son los más baratos, la mejor relación costo/funcionalidad la tienen los de 8 bits, la tecnología de menor consumo es la CMOS pero es un poco más cara que la NMOS. 1.2 El microcontrolador 16F870. 1.2.1 Principales características del 16F870. El modelo 16F870 posee varias características que hacen a este microcontrolador un dispositivo muy versátil, eficiente y práctico para ser empleado en diversas aplicaciones. El diagrama de pines de este microcontrolador se muestra en la figura 1.1. (Herrera y Hernández, 2004).
(18) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 7. Figura 1.1. Diagrama de pines para el 16F870. Características: 1. Memoria de Programa tipo Flash 2Kx14. 2. Memoria Datos 128x8 bytes. 3. EEPROM 64x8 bytes. 4. 22 pines de Entrada/Salida. 5. Encapsulado: 40 pines PDIP, 44 pines PLCC y TQFP, 28 pines DIP, SOIC y SSOP. 6. Soporta Xtal 20MHz. 7. Voltaje de Operación: 2.0 hasta 5.5VDC. (Microchip, 2003b). Periféricos: 1. 1 Conversor A/D de 10-bits (8 canales). 2. 2 Módulos CCP (Captura, Comparador, PWM). 3. 1 Modulo I2C. 4. 1 USART (Puerto Serie). 5. 2 Timers de 8 bits. 6. 1 Timer 16 bits. (Microchip, 2003b)..
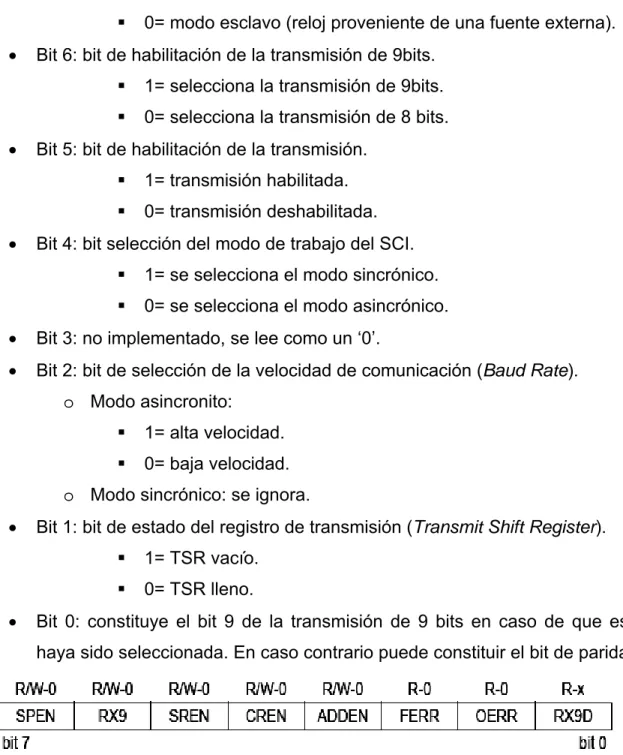
(19) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 8. 1.2.2 Interfaz de comunicación serie (SCI). La interfaz de comunicación serie se conoce como Universal Synchronous Asynchronous Receiver Transmitter (USART) o de manera más sencilla como Serial Communication Interface (SCI). El SCI puede ser configurado como un sistema asincrónico bidireccional que puede comunicarse con equipos terminales de datos como las computadoras personales o puede ser configurado como un sistema sincrónico unidireccional que permite la comunicación con periféricos como conversores análogo-digitales o digito-analógicos, y otros circuitos integrados. (Microchip, 2003b) El SCI puede ser configurado en los siguientes modos: •. Asincrónico – Bidireccional.. •. Sincrónico –Unidireccional Master.. •. Sincrónico –Unidireccional. Esclavo.. Para utilizar el SCI se deben configurar los terminales RC6/TX/CK y RC7/RX/DT como salida y entrada respectivamente para que puedan ser usados como terminales de TX y RX respectivamente. Para ello se colocan los bits 6 y 7 del registro TRISC en ‘1’ y en ‘0’ respectivamente. Los registros que permiten habilitar y controlar el estado tanto de la transmisión como de la recepción se describen a continuación.. Figura 1.2. Registro de control y estado de la transmisión (TXSTA). En el PIC 16F870 el registro TXSTA se encuentra en la dirección 98H en el banco 1 dentro del mapa de memoria y sus bits tienen las siguientes funciones: •. Bit 7: bit de selección de la fuente de reloj. o En modo asincrónico: se ignora o En modo sincrónico: . 1= modo master (reloj generado internamente)..
(20) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. •. •. •. 9. 0= modo esclavo (reloj proveniente de una fuente externa).. Bit 6: bit de habilitación de la transmisión de 9bits. . 1= selecciona la transmisión de 9bits.. . 0= selecciona la transmisión de 8 bits.. Bit 5: bit de habilitación de la transmisión. . 1= transmisión habilitada.. . 0= transmisión deshabilitada.. Bit 4: bit selección del modo de trabajo del SCI. . 1= se selecciona el modo sincrónico.. . 0= se selecciona el modo asincrónico.. •. Bit 3: no implementado, se lee como un ‘0’.. •. Bit 2: bit de selección de la velocidad de comunicación (Baud Rate). o Modo asincronito: . 1= alta velocidad.. . 0= baja velocidad.. o Modo sincrónico: se ignora. •. •. Bit 1: bit de estado del registro de transmisión (Transmit Shift Register). . 1= TSR vacío.. . 0= TSR lleno.. Bit 0: constituye el bit 9 de la transmisión de 9 bits en caso de que esta haya sido seleccionada. En caso contrario puede constituir el bit de paridad.. Figura 1.3. Registro de control y estado de la recepción (RCSTA). En PIC 16F870 el registro RCSTA se encuentra en la dirección 18H dentro del banco 0 del mapa de memoria y sus bits tienen las siguientes funciones: •. Bit 7: bit de habilitación del interfaz serie. . 1=. interfaz. serie. habilitada. (configura. los. terminales. RC6/TX/CK y RC7/RX/DT como terminales de TX y RX)..
(21) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. •. •. 10. 0= interfaz serie deshabilitada.. Bit 6: bit de habilitación de la recepción de 9bits. . 1= selecciona la recepción de 9bits.. . 0= selecciona la recepción de 8 bits.. Bit 5: bit de habilitación de la recepción simple. o Modo asincrónico: se ignora o Modo sincrónico- master: . 1= recepción simple habilitada.. . 0= recepción simple deshabilitada.. o Modo sincrónico-esclavo: se ignora •. Bit 4: bit de habilitación de la recepción continua o Modo asincrónico: . 1= recepción continua habilitada.. . 0= recepción continua deshabilitada.. o Modo sincrónico: . 1= recepción continua habilitada hasta que el bit CREN se ponga a ‘0’ (SREN toma el valor de CREN).. •. 0= recepción continua deshabilitada.. Bit 3: bit de habilitación de la detección de direcciones. o Solo usado en modo asincrónico y recepción de 9 bits (RX9=’1’) . 1= habilita la detección de direcciones y habilita la interrupción y carga del buffer de recepción. . 0= deshabilita la detección de direcciones, el bit 9 puede ser usado como bit de paridad. •. •. Bit 2: bit de error de trama. . 1= ocurrió un error de trama.. . 0= no ocurrió ningún error de trama.. Bit 1: bit de estado del registro de transmisión (Transmit Shift Register). . 1= TSR vacío.. . 0= TSR lleno..
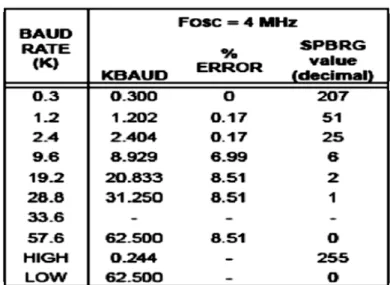
(22) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. •. 11. Bit 0: constituye el bit 9 de la transmisión de 9 bits en caso de que esta haya sido seleccionada. Puede constituir el bit de paridad.. El GENERADOR DE LA RAZÓN DE BAUD PARA ELSCI (BRG). El generador de la razón de Baud (BRG) está soportado sobre la transmisión tanto sincrónica como asincrónica. Consiste en un timer dedicado de 8 bit en corrida libre cuyo periodo es controlado por el registro SPBRG. En modo asincrónico el bit BRGH (TXSTA, 2) también controla la razón de Baud. Teniendo el valor deseado de razón de Baud y la frecuencia del oscilador se puede calcular el valor entero más próximo que se le debe asignar al registro SPBRG. La tabla 1.1 muestra la fórmula para realizar este cálculo.. Tabla 1.1. Fórmula para obtención de la razón a partir del valor cargado en SPBRG o viceversa, con X = valor de SPBRG (0 a 255).. Cargar un nuevo valor en el registro SPBRG hace que el generador de la razón de Baud se limpie automáticamente. Esto asegura que el timer no espere un desborde para establecer la nueva razón de Baud en la comunicación.. La tabla 1.2 muestra una los valores de razón de Baud para sus correspondientes valores cargados en el registro SPBRG y para una frecuencia de oscilador de 4MHz. El error cometido al aproximar el valor de SPBRG al entero más próximo se incluye en la tabla..
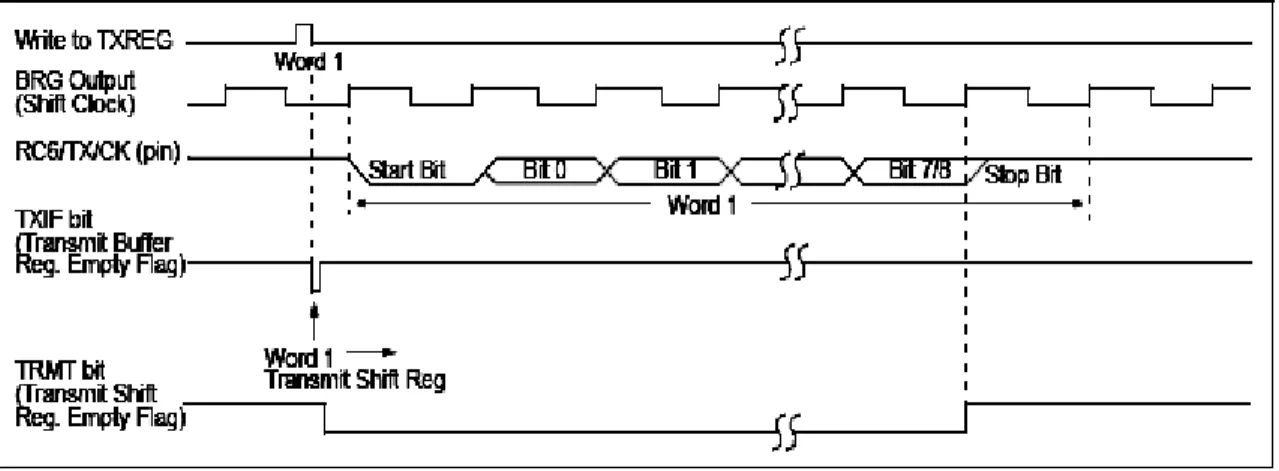
(23) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 12. Tabla 1.2. Razón de Baud para distintos valores del registro SPBRG y frecuencia de oscilador de 4MHz. EL SCI EN MODO ASINCRÓNICO. En modo asincrónico el SCI utiliza el formato estándar NRZ (not returned to zero) el cual consiste en un bit de arranque, ocho o nueve bites de datos y un bit de parada. El formato de datos más común consta de un bit de arranque, ocho bits de datos, un bit de paridad y un bit de parada. El BRG se dedica para establecer una razón de Baud a partir de la frecuencia del oscilador y el valor del registro SPBRG. El SCI transmite o recibe el bit menos significativo (LSB) primero. La transmisión y la recepción son independientes pero usan el mismo formato de datos y la misma razón de Baud. El formato de 9 bits de datos no es soportado por hardware pero puede ser implementado por software. El modo asincrónico es seleccionado poniendo a ‘0’ el bit SYNC (TXSTA, 4). TRANSMISIÓN EN EL SCI. El bloque de transmisión para el SCI se muestra en la figura 1.4..
(24) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 13. Figura 1.4. Bloque de transmisión del SCI. El corazón del sistema de transmisión es el registro de transmisión Transmission Shift Register (TSR) el cual se actualiza a partir del buffer de transmisión (registro TXREG). El buffer se carga con un dato por software. El TSR no se actualiza hasta que el bit de arranque del dato actual no es enviado. Inmediatamente después el TSR toma un nuevo valor leyendo de buffer TXREG. La secuencia de transmisión se muestra en la figura 1.5.. Figura 1.5. Secuencia de transmisión. Cuando el buffer TXREG transfiere un dato al TSR y queda vacío se activa la bandera TXIF (PIR, 4). Esto ocurre en el tiempo TCY. La interrupción de transmisión se puede habilitar mediante el bit TXIE (PIE, 4). El valor del bit TXIF es independiente del valor del bit TXIE..
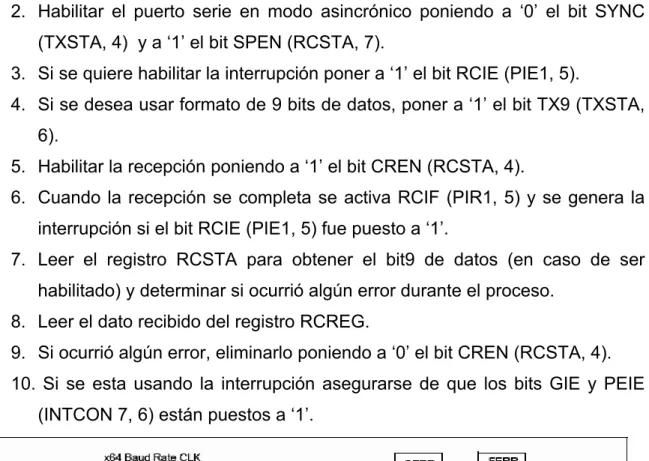
(25) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 14. Mientras que el bit TXIF indica el estado del buffer TXREG el bit TRMT (TXSTA, 1) muestra el estado del TSR. El bit TMRT solo puede ser leído y es puesto a ‘1’ cuando el TSR esta vacío. El registro TSR no esta en el mapa de memoria y por tanto no es accesible al usuario. Para realizar una transmisión asincrónica se deben seguir los siguientes pasos: 1. Inicializar el registro SPBRG para una apropiada razón de Baud. 2. Habilitar el puerto serie en modo asincrónico poniendo a ‘0’ el bit SYNC (TXSTA, 4) y a ‘1’ el bit SPEN (RCSTA, 7). 3. Si se quiere habilitar la interrupción poner a ‘1’ el bit TXIE (PIE1, 4). 4. Si se desea usar formato de 9 bits de datos, poner a ‘1’ el bit TX9 (TXSTA, 6). 5. Habilitar la transmisión poniendo a ‘1’ el bit TXEN (TXSTA, 5). 6. Si se selecciono el formato de 9 bits de datos el bit 9 debe ser cargado en el bit TX9D (TXSTA, 0). 7. Cargar dato en el buffer TXREG. 8. Si se esta usando la interrupción asegurarse de que los bits GIE y PEIE (INTCON 7, 6) están puestos a ‘1’. RECEPCIÓN EN EL SCI. El bloque de recepción se muestra en la figura 1.6. El corazón del sistema de recepción es el registro de recepción Reception Shift Register (RSR). Después de recibido el bit de parada el valor de RSR se transfiere al registro RCREG si se encuentra vacío. Cuando la transferencia se completa el bit RCIF (PIR1, 5) se pone a ‘1’. La interrupción pude ser habilitada a través del bit RCIE (PIE1, 5). Si el bit de parada es un ‘0’ entonces se activa el bit de error de trama (RCSTA, 2). La secuencia de recepción se muestra en la figura 1.7. Para efectuar una recepción en modo asincrónico se deben seguir los siguientes pasos: 1. Inicializar el registro SPBRG para una apropiada razón de Baud..
(26) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. 15. 2. Habilitar el puerto serie en modo asincrónico poniendo a ‘0’ el bit SYNC (TXSTA, 4) y a ‘1’ el bit SPEN (RCSTA, 7). 3. Si se quiere habilitar la interrupción poner a ‘1’ el bit RCIE (PIE1, 5). 4. Si se desea usar formato de 9 bits de datos, poner a ‘1’ el bit TX9 (TXSTA, 6). 5. Habilitar la recepción poniendo a ‘1’ el bit CREN (RCSTA, 4). 6. Cuando la recepción se completa se activa RCIF (PIR1, 5) y se genera la interrupción si el bit RCIE (PIE1, 5) fue puesto a ‘1’. 7. Leer el registro RCSTA para obtener el bit9 de datos (en caso de ser habilitado) y determinar si ocurrió algún error durante el proceso. 8. Leer el dato recibido del registro RCREG. 9. Si ocurrió algún error, eliminarlo poniendo a ‘0’ el bit CREN (RCSTA, 4). 10. Si se esta usando la interrupción asegurarse de que los bits GIE y PEIE (INTCON 7, 6) están puestos a ‘1’.. Figura 1.6. Bloque de recepción para el SCI..
(27) CAPÍTULO 1. LOS MICROCONTROLADORES PIC. EL PIC 16F870.. Figura 1.7. Secuencia de transmisión para el SCI.. 16.
(28) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. CAPÍTULO 2.. 17. Herramienta de software para el diseño. El ARES.. En este capítulo se hará alusión al software denominado ARES, que permite el diseño y construcción de circuitos impresos, perteneciente al paquete de Proteus. Se abordarán sus características y se detallarán las bondades del mismo para el diseño de circuitos impresos, en su versión número 7. 2.1 ¿Que es ARES? ARES: Advanced Routing and Editing Software (por sus siglas en inglés) forma parte del modulo que brinda el Proteus Design Suite, programa que permite la simulación y depuración de los circuitos que contienen, entre otros componentes electrónicos, un microcontrolador. La última versión es compatible con Windows 2000 y XP y la próxima versión será compatible con VISTA. Incluye una nueva interfaz de visualización en 3D con herramientas mejoradas. 2.1.1 Características del editor. El ARES Professional incluye: •. Una base de datos de 32 bit de alta presición que ofrece una resolución linear de 10 nanómetros, una resolución angular de 0.1o y un tamaño máximo de la placa de +/- 10 metros.. •. ARES posee 16 capas de cobre y cuatro capas mecánicas que más la soldadura, resisten y pegan las capas de la máscara..
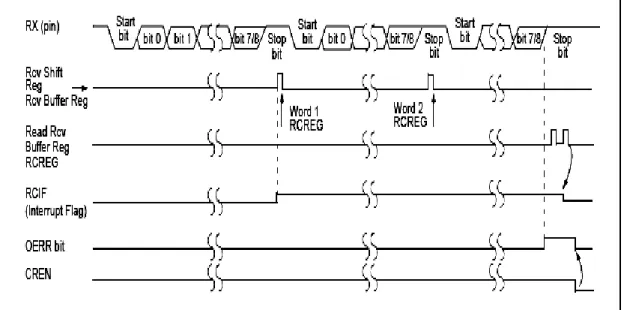
(29) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. •. 18. Interfaz utilizador ergonómico avanzado con la selección de modelos, indicadores de la selección y de actividad y funcionalidad localizada vía menús del contexto.. •. Integración de Netlist con la captura esquemática de ISIS, incluyendo la capacidad de especificar la información de encaminamiento en el diagrama esquemático.. •. Rutas de gran alcance que corrige características incluyendo corrección topológica de la ruta, ruteado automático de la pista y ayuda curvada del rastro.. •. Contiene librería de símbolos con dibujos en 2D.. •. Posee una ventana de visualización en 3D.. •. Contiene bibliotecas de encapsulado para el montaje de las componentes mediante agujeros y mediante el montaje superficial, incluye huellas estándares de SM782 SMT.. •. Presenta estilos ilimitados para la configuración de las opciones del trazo y los terminales de los componentes (Pad/Trace/Via).. •. Salida a una amplia gama de impresoras y de trazadores. También ajusta el formato de salida en gráficos de DXF, de EPS, de WMF y de BMP.. 2.2 Entorno del ARES. Asumiremos en este punto que usted ha instalado el paquete, y que el directorio actual es una cierta área de trabajo conveniente en su disco duro. Para comenzar el programa de ARES después de instalado debe dar clic en el menú inicio y seleccionar de los programas, el Proteus 7 profesional y entonces la opción profesional de ARES 7.. El redactor de la disposición de ARES después. cargará y funcionará. En el borde superior de la pantalla está la barra de menú. El área más grande de la pantalla se llama la Ventana de Edición, y actúa como la ventana de dibujo, aquí es donde usted edita el dibujo en el tablero. El área más.
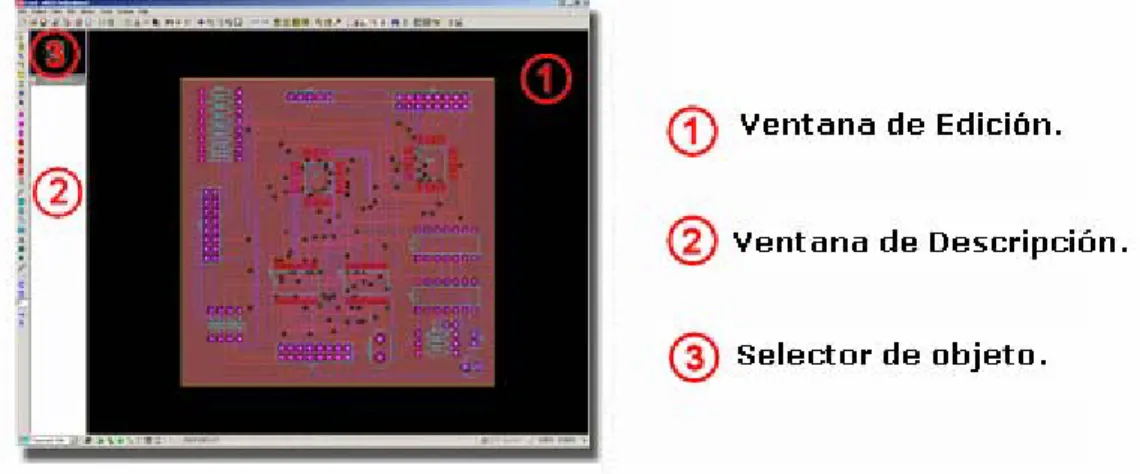
(30) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 19. pequeña en la izquierda superior de la pantalla se llama la Ventana de la Descripción. En uso normal las exhibiciones de Ventana de la Descripción, como sugiere su nombre, una descripción del dibujo entero, la caja azul demuestra el borde de la hoja actual y la caja verde el área de la hoja exhibida actualmente en la ventana que corrige, mostrado en la figura 2.1. Sin embargo, cuando un nuevo objeto se selecciona en el selector de objeto la Ventana de la Descripción se utiliza para ver el objeto de antemano seleccionado. Estas dos últimas partes de la pantalla se pueden configurar de manera tal que cuando el ratón no se encuentre sobre su superficie desaparezcan y así se logra un mayor tamaño en la Ventana de Edición.. Figura 2.1 Ambiente de ARES. La barra de control presente en la parte inferior de la pantalla es digna de una mención adicional y esencialmente parte en cuatro secciones. En el lado de la izquierda se encuentra el filtro de la selección que permite que usted configure las capas y los objetos que serán seleccionados en el modo de funcionamiento actual. Típicamente, las reglas por defecto serán suficientes y ésta sirve simplemente como invalidación conveniente donde usted puede desear una selección más fina en un momento dado. La caja del selector de la capa también determina la capa o el sistema actual de la capa y también se aplica a la colocación de los objetos mostrado en la figura 2.2..
(31) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 20. Figura 2.2 Sección de filtros en el Editor de ARES. En la figura 2.3 se observa que el centro está la barra de estado que proporciona indirectas textuales del objeto que se encuentra actualmente debajo del ratón.. Figura 2.3 Barra de estado en el Editor de ARES. Hacia el lado derecho se encuentra el inspector vivo de la regla del diseño. Esto divulgará cualquier violación física de la regla del diseño que ocurra mientras se está diseñando el tablero. Un clic izquierdo sobre la misma lanzará un diálogo que detallará las violaciones con la opción posterior del enfoque adentro de la Ventana de Edición de cada error en particular, ver figura 2.4.. Figura 2.4 Indicador de la regla de diseño en el Editor de ARES. Usted puede también fijar un origen falso usando el comando del origen (tecla ‘O’) en este caso la coordenada cambiará del color negro al magenta. La rejilla se puede activar o desactivar usando el comando de la misma, o a través del teclado (tecla ‘G’). El espaciamiento de los puntos refleja normalmente el ajuste rápido actual, a menos que cuando está enfocado hacia fuera. En este caso, el espaciamiento del punto se fija a un múltiplo conveniente del espaciamiento más cercano..
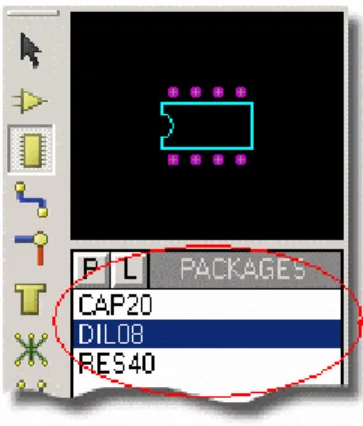
(32) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 21. ARES se puede fijar para exhibir un cursor de X en la posición a la cual ha encajado a presión el indicador con el comando del X-Cursor, la tecla que realiza esta acción es la ‘X’. ARES proporciona cursores dinámicos que cambian para identificar lo que se hará con un clic izquierdo sobre la componente en cualquier momento (poner un objeto, seleccionar un objeto, mover un objeto, etc.). Una lista de los tipos de cursores se muestra a continuación:. Siempre que usted esté trabajando en ARES debe hacer uso de estos indicadores visuales como ayuda. 2.3 Selección y posicionamiento de encapsulados en la ventana de edición de ARES. Al hacer clic izquierdo sobre el botón de encapsulado. (tecla ‘P’) aparece la. ventana que permitirá adicionar al proyecto que se está creando todos los componentes necesarios para la edición del circuito deseado. Una vez seleccionados los componentes la Ventana de Descripción mostrará todos los encapsulados seleccionados como se puede apreciar en la figura 2.6. En este ejemplo se muestran los encapsulados de un capacitor, una resistencia y un circuito integrado de 8 terminales..
(33) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 22. Figura 2.6 Ventana de descripción con los componentes seleccionados. Para la colocación de los componentes en la Ventana de Edición se les marca con el clic izquierdo en la Ventana de Descripción apareciendo automáticamente en el Selector de Objeto el encapsulado correspondiente al objeto señalado. Posterior a esta acción se puede definir la posición con la que se desea colocar el objeto haciendo uso de los botones de rotación mostrados en la figura 2.7. Luego se da clic izquierdo en la Ventana de Edición y se deslizará el ratón hasta la posición que se desea mover el objeto (modo de colocación) y para posicionarlo se vuelve a hacer clic, como se ilustra en la figura 2.8.. Figura 2.7 Iconos de rotación en ARES.. Figura 2.8 Posición del encapsulado DIL08 en la Ventana de Edición. Cuando se encuentra en el modo de colocación y se ejecuta el clic derecho se cancela este modo y la posición de la componente se puede editar de forma dinámica haciendo uso de las teclas ‘+’ y ‘-’ del teclado alfanumérico..
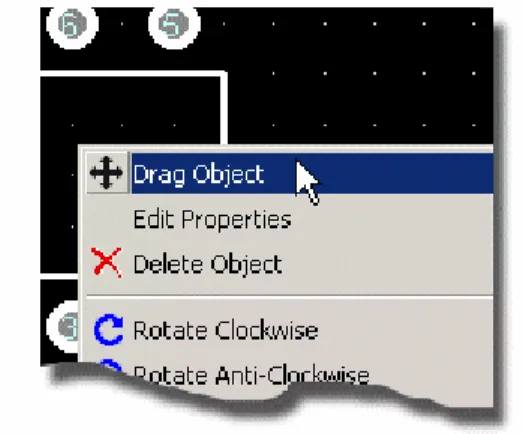
(34) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 23. Después de ubicado el objeto en la Ventana de Edición puede ser movido o arrastrado por todo el diseño. Para ello es necesario marcarlo con clic derecho y en el menú se seleccionará la opción Arrastrar Objeto (figura 2.9).. Figura 2.9 Arrastrando un objeto en el diseño. Esta forma de operación solo se recomienda para el más trivial de tableros. Los diseños que se deseen realizar con cierto nivel de complejidad se recomienda usar el listado que genera el paquete de captura (ISIS) que permite funcionalidades adicionales (encaminamiento comprobable de la conexión, configuración de estrategias, etc.) y permiten realizar un trabajo de mayor seriedad y calidad. 2.4 Nombrado de los objetos en ARES. Cuando los componentes son colocados mediante la forma descrita anteriormente no poseen identificación alguna. Para asignarles una identificación se marcan con el clic derecho y se escoge la opción de Editar Propiedades del menú desplegado y en la nueva ventana en los campos de Part ID y Value se definirán la identificación y valor del objeto, ver figura 2.10..
(35) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 24. Figura 2.10 Edición de las propiedades de un objeto. 2.5 Delimitación del borde de la tarjeta en ARES. El ARES posee una capa especial que delimita el borde de la tarjeta que se está editando y se nombra EDGE layer. Para marcar dicho borde se debe seleccionar el botón que permite dibujar una caja (A), seleccionar el EDGE layer en el selector de capas (B) y trazar en la Ventana de Edición una caja (C) de forma tal que en su interior queden atrapados todos los componentes que conforman el diseño como lo muestra la figura 2.11. En caso de que el borde de la tarjeta que se esté editando no sea rectangular existe la opción de trazar un polígono de la cantidad de lados que se desee y esto es posible si se pincha con el ratón el botón. Figura 2.11 Marcado del borde de la tarjeta..
(36) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 25. 2.6 Facilidades de la edición en bloques en ARES. Hemos visto diferentes formas de seleccionar objetos y nos queda una última. Se basa en hacer clic izquierdo en una zona de la Ventana de Edición donde no exista componente alguna y deslizar el ratón de forma que se dibuje en pantalla una caja que se le indicará su fin un próximo clic, de esta manera se marcará todo lo que quede dentro de dicho cuadro. Si dentro de la selección efectuada queda algún componente que se desee desmarcar se puede usar la sección de filtros de ARES, observar la figura. 2.12.. Figura 2.12 Principales botones de la sección de filtros del ARES. Estos bloques se pueden mover, copiar, borrar, girar, etc. Con solo dar clic derecho sobre lo seleccionado aparecerá un menú con todas estas opciones y otras que permitirán editar la selección. Después de ejecutar cualquiera de estas opciones el resultado no es el deseado se puede volver atrás tecleando la combinación de letras CTRL+Z o sencillamente utilizando el botón Undo. del menú de edición..
(37) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 26. 2.7 Ruteo en ARES. El modo de ruteo se comienza cuando se hace clic en el botón de trazado. y. se escoge en el selector de objeto el tipo de trazo que se desea. En la figura 2.13 se muestran los diferentes tipos de trazos. Los trazos en la Ventana de Edición se realizan haciendo clic izquierdo en el Terminal donde comienza el trazo y se desplaza el ratón hasta donde se encuentra el terminal donde se desea llagar haciendo clic derecho sobre él.. Figura 2.13 Selección del trazo. 2.7.1 Edición de las rutas. Al hacer clic derecho sobre cualquier ruta en la tarjeta que se edita aparece un menú que muestra los cambios que se pueden hacer sobre la ruta en cuestión. A dicho trazo se le puede cambiar el estilo, la capa, se puede borrar, mover o sencillamente preparar para otras operaciones usando las opciones inferiores del menú mostrado en la figura. 2.14.. Figura 2.14 Selección manual de la posición del trazo..
(38) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 27. 2.7.2 Ruteado automático. A toda la acción descrita anteriormente se le denomina ruteado manual de la tarjeta y puede hacerse automáticamente si se escoge dicha opción haciendo clic en el botón de ruteado automático señalado en la figura 2.15.. Figura 2.15 Botón de autorruteado. La opción de ruteado automático de ARES es una de las herramientas de gran alcance del sistema Proteus y es capaz del ahorro de una cantidad enorme de tiempo y de esfuerzo. Sin embargo, a pesar de su sofisticación interna, usarla es muy simple. 2.7.2.1. Características del ruteado automático.. El ruteador automático posee: •. Las operaciones se basan en la rejilla. El ruteo automático divide la tarjeta en celdas de tamaño seleccionable por el usuario y decide donde puede o no colocar los trazos de acuerdo a si las celdas están ocupadas o no.. •. Ruteado multiestratégico. Hay un número de técnicas por las cuales un ruteador puede buscar una ruta viable para una conexión y ARES intenta diversas técnicas alternadamente para encontrar las mejores conexiones.. •. Encaminamiento de múltiples capas. El ruteador puede encaminar hasta en 8 capas que le permiten simultáneamente abordar a los tableros lo más denso posible y hacer el mejor uso del espacio en múltiples capas de encaminamiento.. •. Revisar la operación. En los tableros más densos, el ruteador puede no encaminar todas las conexiones en la primera tentativa. En este caso, se analiza el tablero para quitar las obstrucciones, entonces procura.
(39) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 28. reencaminar las conexiones restantes usando el espacio liberado. Esto es claramente un proceso iterativo pero nuestro código contiene lógica especial para prevenir el comportamiento cíclico. 2.7.2.2. Ruteado en una capa simple.. Para encaminar en una capa simple, usted necesita corregir las estrategias de encaminamiento de modo que todos los pasos especifiquen una sola capa, la cual usted desea encaminar. Esto forzará ARES para encaminar rastros horizontales y verticales en la superficie inferior del tablero. El aprovechamiento de la tarjeta que se encamina por una sola capa es menor que la que se encamina con varias, pero es posible lograr buenos resultados con una correcta ubicación de los componentes. Las rutas que no puedan ser encaminadas se mostrarán al final de la operación y se tendrá la posibilidad de encaminarlas manualmente. 2.7.2.3. Ruteado de componentes de montaje superficial.. Las componentes de montaje superficial, especialmente los circuitos integrados (IC’s), presentan un problema, ya que el centro de sus terminales no coinciden con el centro de la rejilla. Para superar esto el ARES posee una lógica que crea una zona alrededor de los terminales de la componente por la cuál no se puede establecer ningún camino. Esta lógica permite el encaminamiento bajo el IC. 2.7.2.4. Ruteado usando múltiples planos.. ARES incluye un paso que se ocupa de la conexión de los terminales de SMT a los planos internos de la energía. Esto es una situación especial porque requiere la colocación de rutas a la cuales no corresponden a las conexiones entre los terminales de las componentes que se encuentran en la tarjeta. Este paso (llamado PPGVIA) se activa automáticamente, siempre que existan las zonas que tengan su ruta en esta zona permitida. Esto es así por defecto para.
(40) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 29. todas las zonas creadas por el generador del plano de la energía. Por lo tanto, las zonas se deben poner antes de comenzar el encaminamiento automático. El paso de PPGVIA asume que el encaminamiento esté permitido en el plano de la energía, y en la capa ocupada por el terminal de SMT; no hay necesidad de permitir esto específicamente en la estrategia. Sin embargo, haciéndolo así usted también permitirá que se terminen conexiones de energía usando las estrategias normales de encaminamiento. El uso de la posibilidad de ruteo por diferentes planos no se usa mucho en la práctica,. porque carecemos de la tecnología que permite la construcción de. tarjetas de circuitos impresos con esa característica. Además, generalmente los circuitos que se editen en ARES son poco complejos y con una sola pareja de capas es suficiente. 2.8 Visualización de la tarjeta en 3D. Esta herramienta que nos brinda ARES nos permite, una vez finalizada la edición o confección de una tarjeta, la visualización de la misma en tercera dimensión, o sea, nos permite tener una idea más real de cómo será nuestra tarjeta en la realidad. Lo primero que podemos hacer es visualizar el tablero de diferentes ángulos preestablecidos: 1. Realizar un acercamiento. 2. Realizar un alejamiento. 3. Visión superior. 4. Visión delantera. 5. Visión trasera. 6. Visión izquierda. 7. Visión derecha..
(41) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 30. Todas estas opciones se encuentran en la barra del navegador en 3D de ARES mostrada en la figura 2.16 o pueden ejecutarse mediante una vía más rápida, utilizando el teclado. En la tabla 2.1 su muestran dichas teclas y la función que realiza cada una de ellas.. Figura 2.16 Barra del navegador en 3D de ARES. Acción:. Tecla asociada:. Realizar un acercamiento.. F6. Realizar un alejamiento.. F7. Visión superior.. F8. Visión delantera.. F9. Visión trasera.. F10. Visión izquierda.. F11. Visión derecha.. F12 Tabla 2.1. 2.8.1 Características del visualizador en 3D de ARES. Las características principales del espectador 3D incluyen: •. Representación real de los componentes en la tarjeta.. •. Huellas de 3D provistas para la mayoría de las librerías de ARES.. •. Preestablecer los botones de la visión proporcionan el acceso inmediato al tablero.. •. La navegación intuitiva permite que usted atraviese rápidamente el tablero y que se enfoque alrededor de campos de su interés..
(42) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 31. •. Cifrar las bandas del resistor según los valores de las componentes.. •. Importación de modelos vía el estándar del formato del archivo *.3ds permite la creación de huellas excepcionalmente detalladas.. La visualización de la tarjeta se puede editar a gusto del diseñador, pues se pueden configurar las dimensiones, los colores de los componentes y la configuración de la cámara que se usa para visualizar la tarjeta, figuras 2.17 y 2.18 respectivamente.. Figura 2.17 Configuración de las dimensiones y el color de los componentes.. Figura 2.18 Edición de la cámara que visualiza la tarjeta. Además, permite que usted defina una caja de limitación (que representa el envase para el tablero) de dimensiones especificadas. Cuando está permitida la.
(43) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 32. caja aparecerá en un color semi-transparente alrededor del tablero permitiendo que usted determine rápidamente qué objetos resaltan del envase, observe la figura 2.19. Este envase es perfectamente editable por el usuario de la misma manera que se editaron las dimensiones y los colores de los componentes.. Figura 2.19 Representación de la tarjeta en el navegador de 3D. Esta figura se puede salvar como un fichero de extensión *.3ds, acción no recomendable porque este formato de archivo requiere de un espacio en disco considerable, especialmente las tarjetas que contengan muchas componentes. También se puede imprimir, si se posee una impresora a colores quedará con mayor calidad. 2.8.2 Creación de modelos en 3D con ARES. La información del 3D se almacena dentro del paquete de ARES, por lo tanto para la fabricación y edición de estas huellas debemos trabajar dentro de este último en vez de hacerlo dentro del espectador..
(44) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 33. ARES viene preparado para ello y posee una ventana de inspección previa que permite la visualización del modelo mientras se le están editando los parámetros de forma interactiva. Para la creación o edición de una de estas huellas solo debe marcar con clic derecho el elemento y en el menú que aparece seleccionar la opción visualización en 3D (figura 2.20a). Hecho esto aparecerá una ventana que a la parte izquierda que presenta un cuadro de texto y a la derecha un cuadro de visualización (figura 2.20b).. Figura 2.20 Invocando el comando de visualización en 3D (a). Ventana que se muestra al invocar el visualizador en 3D (b) En la parte superior de la ventana aparecen cinco botones que permiten ajustar la forma de visualización de la huella en 3D del objeto seleccionado, así como el tamaño de sus terminales y la distancia a la que se desee levantar el objeto de la tarjeta. La idea ahora es que mecanografiamos dentro del cuadro de texto los parámetros, según el tipo de objeto, para que nuestra huella 3D refleje lo más exactamente posible un dispositivo verdadero. El tipo de modelo depende claramente de las dimensiones físicas del objeto..
(45) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 34. 2.8.3 Tipos de cuerpos de los elementos en 3D de ARES. 2.8.3.1. Cuerpo tipo Extruded (por defecto).. Este método, usado en el caso del defecto donde no se ha especificado ninguna característica, procura formar un polígono cerrado de un gráfico en una capa particular, y después saca ese polígono en la dimensión de Z. La base de este polígono se forma de acuerdo a la capa de la tarjeta. Las características estándares siguientes están también disponibles: Colour:. valor de las componentes R, G, B del objeto.. Minheight:. especifica la distancia del fondo del objeto hasta la tarjeta.. Maxheigt:. especifica la distancia de la tarjeta hasta la parte alta del objeto.. X:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. Y:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. ANGLE:. el ángulo del cuerpo con relación a su encapsulado.. Las propiedades se le asignan al objeto siguiendo la siguiente sintaxis: <propiedad> = <valor> Con excepción del color que se necesitan los valores de sus tres componentes: Colour = (r, g, b) 2.8.3.2. Cuerpo tipo None.. Fijar este tipo de cuerpo quita el cuerpo y los pernos, saliendo de un agujero simple en el tablero. TYPE=NONE Sin embargo si usted requiere un PUENTE por ejemplo entonces usted puede agregar el parámetro PINTYPE=STRAIGHT que rediseñará los pines..
(46) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 2.8.3.3. 35. Cuerpo tipo Cuboid.. Un tipo de cuerpo cuboid presenta las siguientes características: Colour:. valor de las componentes R, G, B del objeto.. Minheight:. especifica la distancia del fondo del objeto hasta la tarjeta.. Maxheigt:. especifica la distancia de la tarjeta hasta la parte alta del objeto.. X:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. Y:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. SX:. especifica el ancho del cuerpo.. SY:. especifica el largo del cuerpo.. ANGLE:. el ángulo del cuerpo con relación a su encapsulado.. Los ejemplos de este tipo incluyen el Pre-hmt, Pre-mt0.75, Pre-mt1.25 y las huellas de Pre-hmin en nuestras bibliotecas. Si se selecciona y pone una de estas piezas y se invoca el comando de la visualización 3D del menú del contexto (como arriba) que debe notarse que se han agregado las características siguientes TYPE=CUBOID MINHEIGHT=1mm MAXHEIGHT=5mm COLOUR = (20, 20, 20) X=6.5mm Y=1mm SX=20mm SY=5mm.
(47) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 2.8.3.4. 36. Cuerpo tipo Axialcylinder.. Lo detalles siguientes son provistos para el cuerpo axial-cilíndrico: Colour:. valor de las componentes R, G, B del objeto.. Maxheigt:. especifica la distancia de la tarjeta hasta la parte alta del objeto.. X:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. Y:. especifica la distancia por el eje X entre el origen de la tarjeta hasta el origen del objeto.. LENGHT:. especifica el largo del cilindro.. ANGLE:. el ángulo del cuerpo con relación a su encapsulado.. RADIUS:. controla el radio del cilindro por las axisas.. BAND:. fija la posición y el color de las bandas de las resistencias.. Los dos parámetros finales son dignos de la discusión adicional pues permiten un considerable control de la codificación de color automático de las bandas del resistor. La propiedad de RADIUS posee la siguiente forma: RADIUS= P1, P2, P3, P4 P1. controla el radio vertical del cilindro.. P2. controla el radio horizontal del cilindro.. P3. controla la profundidad del radio hacia el eje de los cilindros.. P4. controla la profundidad del radio a lo largo del eje de los cilindros.. Esencialmente, los primeros dos parámetros permiten la producción de cuerpos elípticos y los segundos dos parámetros amplían la funcionalidad para permitir la creación de las formas del torpedo. La propiedad de banda posee la siguiente forma: BANDx = P1, P2, (r, g, b).
(48) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 37. Donde x puede ser un número del 1 al 9 (hasta 9 bandas permitidas) y: P1. el punto de partida de la banda a lo largo del cilindro (como porcentaje del tamaño del cilindro.. P2. el punto final de la banda a lo largo del eje del cilindro (como porcentaje del tamaño del cilindro). rgb el valor del color de la banda. Si está omitido, el color del defecto será calculado del campo de valor de los componentes, teniendo en cuenta la codificación de color automática de los resistores etc. De esta manera se crean la mayoría de los resistores de las bibliotecas de ARES. A continuación se muestran las propiedades de una de ellas: TYPE=AXIALCYLINDER MAXHEIGHT=2 LENGTH=0.2in RADIUS=0.027in, 0.027in, 0.2mm, 0.2mm X=0.2in Y=0.0in COLOUR= (128, 64, 64) BAND1=20, 25 BAND2=30, 35 BAND3=40, 45 BAND4=50, 55 BAND5=80, 85.
(49) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. 38. 2.8.4 Tipo de pines de los elementos en 3D de ARES. Modificando el tipo de cuerpo para requisitos particulares es a veces también necesario cambiar el perno tipo para el modelo 3D. Existen siete estilos de los pines disponibles para su uso: 1. NONE. el que presenta por defecto.. 2. STRAIGHT. conductores. paralelos. que. salen. del. fondo. del. elemento. 3. BENTWIRE. conductores horizontales a ambos lados del elemento.. 4. SMTZ. conductores de montaje superficial.. 5. SMTJ. conductores de montaje superficial por todas las aristas de la base del elemento con pines.. 6. SMTB. conductores de montaje superficial por todas las aristas de la base del elemento por contacto.. 7. CUBOID. cubos metálicos en los extremos del elemento.. Los pines se definen de la siguiente manera: PINTYPE = XXXXXXXX Las características adicionales que se pueden aplicar a los pernos son detalladas a continuación: PINCOLOUR PINMAX. valores de las componentes r, g, b de los pines. esto indica el grado más alto del perno de la superficie del tablero y es utilizada por todo el perno tipos.. PINMIN. esto indica el grado más bajo del perno de la superficie del tablero. Para los pernos directos éste será probablemente un valor negativo, porque montaje de la superficie que es probable ser cero..
(50) CAPÍTULO 2. HERRAMIENTA DE SOFTWARE PARA EL DISEÑO. EL ARES.. PINDIAMETER. 39. para los pernos DERECHO y de BENTWIRE, esto controla el diámetro del terminal. Para SMTB controla el diámetro del hemisferio.. PINLENGTH. para SMTJ y SMTZ esto controla la longitud de la base del terminal.. PINTHICKNESS. para SMTJ y SMTZ esto controla el grueso del terminal.. PINWIDTH. para SMTJ y SMTZ esto controles cómo anchura del terminal.. PINMOVE. esto mueve los pernos más cercanos o los fomenta lejos del límite. del. cuerpo. especificada.. del. paquete. por. la. cantidad. fija.
(51) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. CAPÍTULO 3.. 40. Diseño, programación y montaje del Kit para el PIC 16F870.. Se aborda el diseño y construcción del Kit de entrenamiento con el PIC 16F870. Para ello se realiza un análisis de las características de estos dispositivos y sus principales funciones, descripción detallada de la selección y diseño del hardware. Finalmente el diseño e implementación del software y el análisis económico. 3.1 Generalidades. Este dispositivo es muy sencillo y permite descargar programas al PIC usando únicamente el puerto serie. Solo es necesario utilizar un grabador de PIC una vez, para grabar el programa cargador. Una vez cargado dicho software en el PIC ya podemos descargar en él nuestros programas vía serie, sin necesidad de grabador, todas las veces que queramos. Como nuestro hardware posee puerto serie no es necesario quitar el PIC de su zócalo: usando el puerto serie de nuestro proyecto hacemos la descarga. Esta función reconoce al sistema como Kit cargador (bootloader). (Microchip, 2002) El programa cargador se graba en la memoria FLASH de programa del PIC y arranca cuando alimentamos el procesador. Chequea la última posición de memoria EEPROM que es utilizada como bandera y espera por un comando proveniente del puerto serie. La localización de memoria utilizada como bandera definirá el modo de trabajo del Kit, si al chequearla no está vacía, el Kit de entrenamiento trabaja en el modo de cargador, esperando el programa que se desea situar en la memoria Flash. Además de quemar un programa el la memoria del micro, permite leer, borrar dicha memoria e identificarse con la PC que está conectado el Kit..
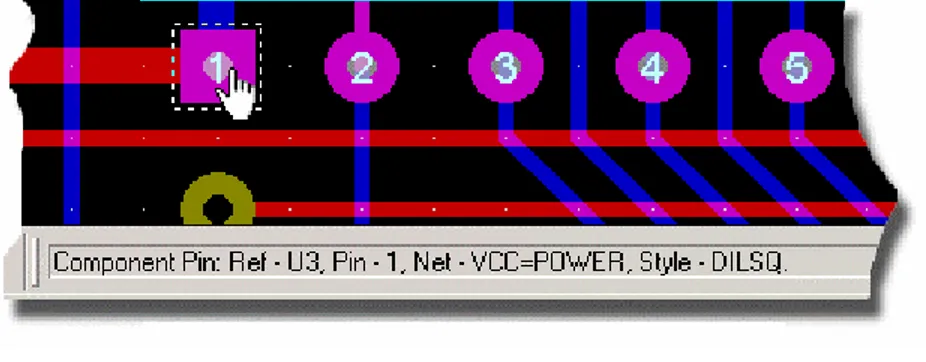
(52) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. 41. 3.2 Diseño y análisis del hardware. En esta aplicación el hardware que se diseña es sumamente sencillo. Puesto que se trata de un Kit de entrenamiento que solo cuenta con el microcontrolador seleccionado y con el circuito asociado a la comunicación serie con la PC, mediante el Hyper Terminal. 3.2.1 Características generales. Este dispositivo, de gran utilidad en la docencia donde se estudien los microcontroladores, es de fácil construcción. En la figura 3.1 se muestra el esquema de dicha aplicación diseñado en Proteus y en la figura 3.2 se puede observar el circuito impreso correspondiente editado en ARES, software descrito en el capítulo anterior.. Figura 3.1 Esquema circuital del Kit de entrenamiento..
(53) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. 42. Figura 3.2 Circuito impreso del Kit de entrenamiento. Esta placa de circuito impreso posee la característica de tener dimensiones muy pequeñas, lo que facilita su construcción y abarata el costo de producción del Kit. Posee 93 x 58,1 milímetros de largo por ancho y está ruteada por una sola capa. 3.2.2 Max 232C. Este circuito integrado es el que provee la comunicación del Kit con la PC. La familia Max220-max249 de la línea drivers/receivers está prevista para todas las comunicaciones e interfaces, particularmente donde no están disponibles el uso de ± 12V. (Maxim, 2004) El circuito integrado MAX232A posee las siguientes características eléctricas: •. Fuente de alimentación: +5V.. •. Posee 2 módulos de Rx/Tx independientes.. •. Necesita de 4 capacitores externos de 10 µF.. •. Soporta razones de 200 kbps.. •. Impedancia de salida de 10MΩ.. •. Posee una resistencia de entrada de 5KΩ..
(54) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. •. Corriente de salida en cortocircuito de ±60 mA.. •. Opera en el rango de ±30 V los módulos de Rx/Tx.. •. Demora de propagación en la Rx de 0.5µs.. •. Funciona de 0-70 oC.. •. Presenta encapsulado plástico DIP16.. 43. Figura. 3.3 Distribución de terminales de la MAX232A. 3.2.3 Fuente de alimentación. Para el Kit de entrenamiento se utiliza una fuente no regulada que puede oscilar, su valor, entre 9 y 12 VDC. Por el bajo consumo del Kit se diseña una fuente regulada con KA7805A que regula el voltaje de un transformador exterior de 12V de corriente directa. (Fairchild Semiconductor, 2003) En la figura 3.4 se muestra el esquema eléctrico de la fuente de alimentación..
(55) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. 44. Figura 3.4 Esquema eléctrico de la fuente de alimentación. 3.3 Algoritmos y programas. El Kit de desarrollo, cuenta también con un programa confeccionado y compilado por el software MPLAB de la Microchip. Este programa una vez quemado en la memoria Flash del microcontrolador es el encargado de cargar de manera dinámica diferentes versiones de código en el microcontrolador; permitiendo así la puesta a punto de programas en tiempo real. (Microchip, 2003a) 3.3.1 Descripción de las principales subrutinas y del programa principal. Las principales subrutinas que conforman el software del cargador se describen a continuación: •. Subrutina CONVERSION_WF: es el alma de todo el programa. Se encarga de extraer los datos que llegan al microcontrolador por el puerto serie en el formato INTEL HEXADECIMAL (para una mayor información dirigirse al sub-epígrafe 3.3.2) para guardarlos en memoria de datos y después de comprobar que en la transmisión no ocurrieron problemas pasa todos los datos, según el orden en que llegaron, a la memoria de programa del microcontrolador. Al finalizar el proceso esta subrutina responde con un mensaje que depende del éxito de la operación. El diagrama en bloques de dicha subrutina se muestra en el anexo III.. •. Subrutina WEPROM: se encarga de escribir en la última posición de memoria EEPROM del microcontrolador el valor 00H que simboliza que se ha cargado en la memoria de programa del microcontrolador un programa nuevo. Su diagrama en bloques se adjunta en el anexo IV..
(56) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. •. 45. Subrutina BORRAR: se encarga de borrar la memoria de programa del microcontrolador sin afectar la parte que ocupa el programa cargador, que es completamente transparente para el usuario que utiliza esta aplicación. El diagrama en bloques de esta subrutina se muestra en el anexo V.. •. Subrutina REPROM: se encarga de leer de la última posición de la memoria EEPROM del microcontrolador para en dependencia del valor de la misma ejecutar una u otra acción. Su diagrama en bloques se muestra en el anexo VI.. •. Subrutina LEER: es la que se encarga de leer el contenido de la memoria de programa del microcontrolador sin afectar la parte que ocupa el programa cargador. El diagrama en bloques de esta subrutina se puede observar en el anexo VII.. •. Subrutina BOOTLOADER: esta subrutina es la que se encarga de cargar un programa nuevo en la memoria Flash del microcontrlolador. Está formada por un intérprete de comandos que le permite al usuario realizar varias operaciones con el código en cuestión.. •. Subrutina OBTENER: es una subrutina que se usa en casi todo el programa. Se encarga de convertir a partir de dos caracteres ASCII el dato que en realidad se procesará. Utiliza otra subrutina para detectar si los datos a procesar son números o letras.. •. Subrutina LETRA: esta solo se encarga de convertir el ASCII de una letra en un dato que al combinarse con la subrutina anterior conforman en dato a procesar.. •. Subrutina RUN: se ejecuta cuando se recibe por el puerto serie del microcontrolador el ASCII del comando @. Se encarga de escribir el dato 00H en la última posición de memoria EEPROM del microcontrolador y ejecutar el programa cargado en memoria Flash.. •. Subrutina OTRO_SOFT: se ejecuta cuando se recibe en ASCII del comando $ por el puerto serie del microcontrolador. Se encarga de borrar el.
(57) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. 46. dato 00H que se encuentra en la última posición de memoria EEPROM del microcontrolador para indicar que se desea cargar un nuevo programa. •. Programa principal: el programa principal se basa solamente en la toma de una desición después de analizar determinada posición de memoria. Se comienza ejecutando las subrutinas INIREG e INISER que se encargan de inicializar todos los registros que se necesitan en la aplicación y de habilitar la comunicación serie del microcontrolador con la PC respectivamente. Posteriormente se ejecuta la subrutina REPROM y en dependencia del dato que debuelva la misma se salta a la subrutina RUN1 o a la subrutina BOOTLOADER. Su diagrama en bloques se muestra en el anexo VIII.. 3.3.2 Formato del fichero INTEL HEXADECIMAL. Intel Hexadecimal Format (Formato Intel Hexadecimal), es un estándar para guardar los programas de idioma de máquina en un formato desplegable o imprimible. Un archivo INTEL (.hex) es una serie de líneas o “archivos de grabación” que contiene los campos mostrados en la tabla 3.1 Campo. Bytes. Descripción. Marca de Registro. 1. ": " indica comienzo del registro.. Longitud de Registro. 1. Número de bytes de datos en el registro (en hexadecimal).. Dirección de carga. 2. Dirección de carga para los bytes de datos.. Tipo de registro. 1. 00=datos 01=fin registro.. Bytes de datos Suma de Comprobación. 0-16 1. datos Suma de comprobación de todos los bytes.. Tabla 3.1.
(58) CAPÍTULO 3. DISEÑO, PROGRAMACIÓN Y MONTAJE DEL KIT PARA EL PIC 16F870.. 47. En la figura 3.5 de muestran todos los campos de este fichero en un segmento del mismo.. Figura 3.5. Campos del fichero INTEL. •. El campo Marca de Registro de 1 byte indica el comienzo de la transmisión del registro, dentro de este byte se almacena el código ASCII del carácter ‘:’(3AH).. •. En el byte de Longitud de Registro se guarda el número de bytes de datos que serán transmitidos en el registro (en hexadecimal).. •. Los bytes de Dirección de Carga contienen la dirección de arranque (en memoria de programa) para los bytes de los datos.. •. El byte Tipo de Registro indica el contenido de lo que será transmitido a continuación, 00=datos; 01=fin registro.. •. El próximo campo que puede ser de 0 a 16 bytes y contiene los datos del programa.. •. El byte Suma de Comprobación se calcula de manera que la suma de todos los bytes del campo más el propio checksum sea 0x00 (00 en hexadecimal). Sólo se considera el byte menos significativo de la suma.. Para calcular la suma de comprobación como primer paso se suman todos los bytes del registro con excepción del carácter correspondiente a los dos puntos, se trunca el resultado y se toma el byte menos significativo. A este número se le halla el complemento A2, para ello, se deben cambiar los 1 por 0 y viceversa.
Figure
+7
Documento similar
En la entrenadora se va incluir zócalos para instalar los microcontroladores PIC de 18 y 28 pines y como en “Sistemas Basados en Microprocesador” se estudia la estructura y
A partir de los resultados de este análisis en los que la entrevistadora es la protagonista frente a los entrevistados, la información política veraz, que se supone que
Actuar con violencia de género en medios electrónicos o digitales (aquellas conductas realizadas mediante medios electrónicos o digitales y/o mediante cualquier red social, y
[r]
[r]
En este apartado de la experimentación, se ha utilizado de forma conjunta las técnicas orientadas a la definición de la estructura de dependencias de tareas de la aplicación,
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
