Simulación de circuitos de mando y control de motores eléctricos
96
0
0
Texto completo
(2) UNIVERSIDAD CENTRAL “MARTA ABREU” DE LAS VILLAS FACULTAD DE INGENIERÍA ELÉCTRICA DEPARTAMENTO DE ELECTROENERGÉTICA. Trabajo de Diploma Simulación de circuitos de mando y control de motores eléctricos. Autor: Rosbel Muñoz Aguila Email: [email protected] Tutor: MSc. Arian Ramos Martínez Email: [email protected] Profesor Asistente Dpto. de Electroenergética, Facultad de Ing. Eléctrica, UCLV. Santa Clara, Cuba, 2017.
(3) Hago constar que el presente Trabajo de Diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución para los fines que estime convenientes, tanto de forma parcial como total, y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. ______________________________ Rosbel Muñoz Aguila. Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. ____________________________________________ Rosbel Muñoz Aguila. ___________________________ MSc. Arian Ramos Martínez. Fecha. ___________________________ Responsable ICT o J` de Carrera. Fecha. _________________ Jefe del Departamento. _________________ Responsable de Información Científico-Técnica.
(4) Pensamiento.
(5) Hay una fuerza motriz más poderosa que el vapor, la electricidad y la energía atómica: la voluntad. Albert Einstein.
(6) Dedicatoria.
(7) A mi maravillosa abuela, por su incondicionalidad y su amor eterno, por estar siempre para mi sin yo merecerlo, por ser la persona que más se sacrificó conmigo en esta batalla con el único objetivo de que yo saliera victorioso...a ti abuela de mi vida. A mi padre que siempre me brindó su apoyo incondicional, a él, que son las manos que me sostienen, el que me da confianza para seguir luchando por mis sueños y esta ahí para ayudarme a levantarme cada vez que caigo, a ti papá por ser el mejor del mundo. A mi mamá y a mi familia, que todos me apoyaron, sufrieron y celebraron junto a mi todos mis logros y descalabros. A mí novia para que encuentre sabiduría en el estudio y se aferre al él, y sepa que siempre estará en mi corazón..
(8) Agradecimientos.
(9) A mi abuela por ser mi guía y mi bastón en los momentos de inseguridad. A mi papá por ser mi padre, mi amigo y mi profesor eterno y ejemplo a seguir. A mi mamá y mis hermanas por siempre confiar en mí. A mi novia por ser mi fiel amiga y compañera en los momentos malos y buenos, y por siempre apoyarme y estar a mi lado. A mis tíos Tamara, Félix y Mabel por apoyarme y guiarme siempre por el buen camino y nunca rendirse conmigo. A Carmen por ayudarme en estos largos años. A Yadian que más que un amigo es un hermano. A mis amigos Juan Carlos, Alejandro y David que tanto me apoyaron en estos años. A mi tutor por brindarme sus conocimientos y por su preocupación por la culminación de este trabajo. Gracias.
(10) TAREAS TÉCNICAS 1. Revisión bibliográfica sobre accionamientos eléctricos de dispositivos de control y protección. 2. Revisión bibliográfica sobre accionamientos eléctricos en el arranque, frenado y control de velocidad en motores eléctricos. 3. Confeccionar una ayuda para trabajar con el programa. 4. Montar circuitos de control y protección que se impartan en clases. 5. Simular los circuitos de control y protección. 6. Redactar el informe final de la investigación.. __________________ Firma del Autor. _____________________ Firma del Tutor.
(11) RESUMEN En el presente trabajo se hace un resumen de las potencialidades y la versatilidad del programa de edición y simulación de esquemas de automatismos eléctricos CADe-Simu. Se realiza una explicación de los motores de corriente directa y corriente alterna que se pueden emplear en el trabajo con el programa, así como la explicación de algunos métodos de arranque, control de velocidad y frenado que se pueden emplear en la práctica con estos motores. Se confeccionaron ejemplos de rutina en lo que respecta a tipos de arranque, control de velocidad y frenado de los diferentes tipos de motores. Se muestra con esto algunas de las potencialidades del CADe-Simu para la futura utilización como herramienta de apoyo en la formación de los Ingenieros Eléctricos en las asignaturas de Máquinas Eléctricas y Accionamientos Eléctricos.. Palabras Clave: motor, control, dispositivo..
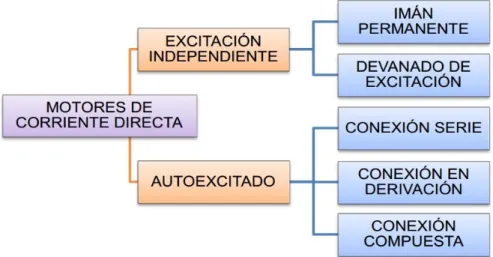
(12) ÍNDICE. TAREAS TÉCNICAS ................................................................................................................. i RESUMEN .................................................................................................................................ii INTRODUCCIÓN ...................................................................................................................... 1 CAPÍTULO 1. Dispositivos de control y protección. ................................................................. 4 1.1 Introducción..................................................................................................................... 4 1.2. Arrancadores. ............................................................................................................. 4. 1.2.1 Arrancadores Manuales. .......................................................................................... 5 1.2.2 Arrancadores automáticos........................................................................................ 5 1.2.3 Arrancadores Suaves. .............................................................................................. 6 1.3. Variadores de Velocidad. ........................................................................................... 7. 1.3.1 Variadores de Velocidad de corriente alterna. ............................................................. 7 1.3.2 Variadores de Velocidad de corriente directa. ............................................................. 8 1.4. Fuentes de Alimentación. ........................................................................................... 9. 1.4.1 Diseño eléctrico y su funcionamiento por etapas. .................................................... 9 1.4.1.1 Etapa de transformación. ................................................................................... 9 1.4.1.2 Etapa de rectificación....................................................................................... 10 1.4.1.3 Etapa de filtrado. .............................................................................................. 10 1.4.1.4 Etapa de regulación. ........................................................................................ 11 1.4.2 Tipos de fuentes de alimentación. .......................................................................... 11 1.5. Rectificadores y su clasificación............................................................................... 11. 1.5.1 Rectificadores no controlados. ............................................................................... 12 1.5.2 Rectificadores controlados. .................................................................................... 12 1.6. El transformador. ...................................................................................................... 12. 1.6.1 Descripción de un Transformador. ......................................................................... 13 1.7. El Autotransformador. .............................................................................................. 14. 1.7.1 Operación del autotransformador. .......................................................................... 14 1.7.2 Tipos de autotransformador ................................................................................... 15 1.8 Fusibles. ........................................................................................................................ 16 1.8.1 Partes que componen un fusible. ........................................................................... 16.
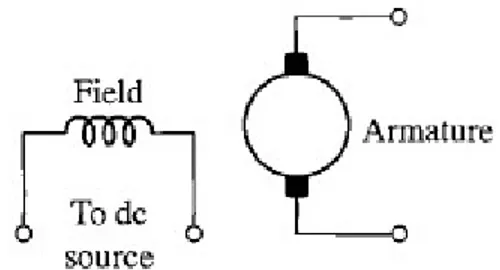
(13) ÍNDICE. 1.8.2 Características Eléctricas de los Fusibles. ............................................................. 16 1.8.3 Información general de fusibles suministrada por el fabricante. ............................ 17 1.8.3.1 Clases de fusión de los fusibles....................................................................... 17 1.9. Contactores. ............................................................................................................. 19. 1.9.1 El contactor electromagnético. ............................................................................... 19 1.10. Disyuntores. ............................................................................................................. 20. 1.10.1 Los Disyuntores Magnéticos. ............................................................................... 20 1.10.2 El Disyuntor Motor Magnetotérmico (Guardamotores). ........................................ 21 1.11. Interruptores. ............................................................................................................ 22. 1.11.1 El interruptor y el interruptor seccionador............................................................. 22 1.11.2 Interruptores diferenciales. ................................................................................... 23 1.12. Dispositivos de control. ............................................................................................ 23. 1.12.1 Aparatos de control. ............................................................................................. 23 1.12.2 Final de carrera. ................................................................................................... 24 1.12.3 Detectores de proximidad inductivos.................................................................... 24 1.12.4 Detectores capacitivos. ........................................................................................ 25 1.12.5 Detectores fotoeléctricos. ..................................................................................... 25 1.12.6 Sistema de barrera Emisor-Receptor. .................................................................. 26 1.13 Relé Térmico. .............................................................................................................. 26 CAPÍTULO 2. Accionamientos de motores eléctricos. ........................................................... 29 2.1 Introducción................................................................................................................... 29 2.2 Motores de corriente directa. ........................................................................................ 29 2.2.1 Tipos de motores de C.D........................................................................................ 30 2.3 Arranque de los motores de C.D................................................................................... 32 2.3.1 Arranque directo. .................................................................................................... 34 2.3.2 Arranque por resistencia. ....................................................................................... 34 2.3.3 Arranque a voltaje reducido.................................................................................... 35 2.4 Control de velocidad de motores de C.D. ..................................................................... 36 2.4.1 Control de velocidad añadiendo resistencia en serie con la armadura. ................. 37 2.4.2 Control de velocidad variando el flujo principal de la máquina............................... 38 2.4.3 Control de velocidad variando el voltaje de alimentación. ...................................... 39 2.5 Métodos de frenados para motores de C.D. ................................................................. 40.
(14) ÍNDICE. 2.5.1 Frenado dinámico. .................................................................................................. 41 2.5.2 Frenado por inversión o contracorriente................................................................. 42 2.6 Motores de inducción trifásicos. .................................................................................... 42 2.7 Control de velocidad de los motores de inducción trifásicos. ....................................... 43 2.7.1 Control de velocidad variando frecuencia. ............................................................. 45 2.7.2 Control de velocidad variando voltaje de alimentación. ......................................... 46 2.7.3 Control de velocidad variando la resistencia del rotor. ........................................... 47 2.7.4 Control de velocidad variando el número de polos. ............................................... 48 2.8 Arranque en los motores inducción trifásicos. .............................................................. 49 2.8.1 Arranque estrella – delta. ....................................................................................... 49 2.8.2 Arranque colocando resistencia en serie con el circuito del rotor. ......................... 50 2.8.3 Arranque con resistencia en serie con el estator. .................................................. 50 2.9 Métodos de frenado para motores trifásicos de inducción............................................ 51 2.9.1 Frenado dinámico. .................................................................................................. 51 2.9.2 Frenado por contracorriente. .................................................................................. 51 CAPÍTULO 3. Simulación en CADe-Simu de los accionamientos de motores....................... 52 3.1 Introducción................................................................................................................... 52 3.2 Arranque por resistencia de un motor de C.D con excitación independiente. .............. 52 3.3 Arranque a voltaje reducido de un motor de C.D. con excitación independiente. ........ 55 3.4 Control de velocidad de un motor de C.D. añadiendo resistencia en serie con la armadura. ............................................................................................................................ 57 3.5 Control de velocidad de un motor de C.D. variando el flujo principal. .......................... 59 3.6 Frenado dinámico de un motor de C.D. ........................................................................ 61 3.7 Frenado contracorriente de un motor de C.D. .............................................................. 63 3.8 Arranque estrella-delta de un motor trifásico de inducción. .......................................... 66 3.9 Arranque de un motor de rotor bobinado con resistencia en serie con el rotor. ........... 68 3.10 Arranque de un motor trifásico de inducción por resistor en serie con el estator. ...... 70 3.11 Control de velocidad utilizando un variador de frecuencia. ......................................... 73 3.12 Otros circuitos de potencia y control. .......................................................................... 75 CONCLUSIONES ................................................................................................................... 77 RECOMENDACIONES........................................................................................................... 78 BIBLIOGRAFÍA ....................................................................................................................... 79.
(15) INTRODUCCIÓN El accionamiento ha transcurrido por un largo camino en su desarrollo desde el accionamiento manual y el animal, pasando por el mecánico y de vapor hasta los accionamientos eléctricos modernos, en los cuales el motor constituye el elemento fundamental en la conversión electromecánica de energía, en la actualidad con el impetuoso desarrollo de la Electrónica de Potencia (E.P.) en la cual tanto el convertidor como el controlador forman parte de los Accionamientos Eléctricos (A.E.) modernos, los cuales se denominan Accionamientos Eléctricos Automatizados. Esto conlleva a grandes mejoras en los montajes de circuitos de mando y potencia donde se utilizan motores eléctricos, los cuales requieren de modernos dispositivos de control y protección. Estos dispositivos de control y protección son de vital importancia para el Ingeniero Eléctrico, ya que son en los cuales se va a apoyar para conformar los circuitos con el objetivo de lograr su correcto funcionamiento y que cumpla con las normativas requeridas. En la formación de los estudiantes como futuros ingenieros eléctricos es imprescindible su paso por la disciplina de Accionamientos Eléctricos y Máquinas Eléctricas donde es de vital importancia el estudio y conocimiento de los diferentes dispositivos de control y protección para dicho estudiante ya graduado. A lo largo de la carrera y tomando como referencia los criterios de alumnos ya graduados y los estudiantes que actualmente se encuentran cursando estas disciplinas, de conjunto con los profesores que conforman el claustro encargado de estas asignaturas, se evidencia la poca experiencia práctica de los graduados a la hora de resolver problemáticas relacionadas con el montaje de circuitos eléctricos (de control y protección de motores eléctricos), los que se debe a la falta de recursos materiales destinados a las prácticas de laboratorio y la no existencia de un programa informático que ayude de forma práctica al montaje de circuitos de mando y potencia de motores eléctricos. Lo anteriormente expuesto constituye la situación problémica de esta investigación, de lo que se deriva el siguiente problema científico: ¿Cómo lograr que nuestros estudiantes salgan mejor preparados en el diseño y montaje de circuitos de control y protección de motores eléctricos? Para dar respuesta a la interrogante científica nos planteamos el siguiente Objetivo General:.
(16) INTRODUCCIÓN. Simular con la ayuda del programa CADe-Simu los circuitos de control y protección de motores eléctricos más empleados e impartidos en las disciplinas de Máquinas Eléctricas y Accionamiento Eléctrico. Para dar cumplimiento al objetivo general, se plantean los siguientes Objetivos Específicos: 1. Hacer una revisión bibliográfica sobre los dispositivos de control y protección de motores. 2. Hacer una revisión bibliográfica sobre los tipos de arranque, frenado y control de velocidad de los motores eléctricos. 3. Confeccionar una ayuda para trabajar con el programa CADe-Simu. 4. Simular los circuitos de control y protección para los diferentes tipos de arranque, frenado y control de velocidad de los motores eléctricos. 5. Simular los circuitos de control y protección impartidos en clases. Tareas de investigación: . Revisión de libros, artículos y trabajos de diplomas relacionados con los fundamentos teóricos de los dispositivos de control y protección.. . Revisión de artículos bibliográficos sobre tipos de arranque, frenado y control de velocidad de motores eléctricos.. . Familiarización con el programa CADe-Simu para desarrollar la ayuda correspondiente.. . Ejemplificación de los diferentes tipos de arranque, frenado y control de velocidad de los motores eléctricos.. Hipótesis de investigación: Si se realiza una ayuda del programa CADe-Simu se logrará que nuestros estudiantes a través del montaje de diferentes modelos de circuitos utilizando las herramientas que nos brinda el programa informático salgan mejor preparados en el diseño y montaje de circuitos de control y protección de motores eléctricos. Justificación y viabilidad: El aporte de este trabajo, desde el punto de vista metodológico, radica en el material elaborado, que puede ser consultado por ingenieros, especialistas, alumnos y profesores donde se analizan las características de los dispositivos de control y protección además de simular, utilizando estos dispositivos, los diferentes tipos de arranque, frenado y control de velocidad de los motores eléctricos en el programa CADe-Simu. 2.
(17) INTRODUCCIÓN. Desde el punto de vista práctico consiste en proporcionar una herramienta de ayuda para los futuros estudiantes y profesores de la carrera de Ingeniería Eléctrica. La viabilidad radica en que se cuenta con la información bibliográfica necesaria para la realización de los diferentes objetivos propuestos, así como con la asesoría de un tutor con experiencia en el campo de las asignaturas de Accionamientos Eléctrico y Máquinas Eléctricas. Se posee además con los recursos materiales, humanos y financieros necesarios para el desarrollo de esta investigación. Tipo de investigación: Los estudios realizados son de carácter exploratorio, descriptivo y explicativo que facilitan mucha más información y comprensión del problema objeto de investigación. Métodos de investigación: En esta investigación se emplearon diversos métodos como son: el método universal, el dialectico-materialista; del nivel teórico: el histórico-lógico, el análisis-síntesis, la inducción-deducción; del empírico: la revisión de documentos, la observación y ejecución de los elementos del programa CADe-Simu. El cuerpo de este informe según la metodología está estructurado de la siguiente manera: Introducción, donde se caracteriza la situación problemática y se fundamenta el problema de investigación. Capítulo I: Aborda los principales fundamentos teórico-metodológicos relacionados con los de dispositivos de control y protección, tanto de corriente directa como de corriente alterna a partir de una amplia revisión bibliográfica. Capítulo II: Se realiza una explicación detallada de los diferentes tipos de arranque, frenado y control de velocidad de los motores eléctricos de corriente directa (C.D.) y corriente alterna (C.A.), a partir de un estudio exhaustivo de los materiales bibliográficos. Capítulo III: Se muestran los circuitos de mando y protección montados de ejemplos de arranque, frenado, control de velocidad de motores eléctricos de corriente directa y corriente alterna, de conjunto con la explicación correspondiente a cada situación. Por último, se presenta un cuerpo de conclusiones y recomendaciones, además de, la bibliografía referenciada.. 3.
(18) CAPÍTULO 1. Dispositivos de control y protección. 1.1 Introducción El desarrollo de la actividad industrial exige la automatización de los procesos productivos, lo cual ha motivado el empleo de los motores eléctricos y su accionamiento en los que están involucrados los dispositivos de contacto, los cuales permitieron un avance importante en la automatización de los procesos productivos. Estos dispositivos actúan por medio electromagnéticos y requieren para su funcionamiento una pequeña fracción de la potencia que son capaces de manejar mediante sus contactos principales. Los dispositivos de contacto se dividen en dispositivos de control y de protección. En este capítulo abordaremos los elementos de control y protección que debe llevar un circuito en donde se desee preservar los bienes y la vida de las personas, así como garantizar un correcto funcionamiento del mismo. Es por eso que se analizan las características constructivas de los dispositivos de control y protección que se deben utilizar en las diferentes funciones que se les puedan asignar. 1.2 Arrancadores. El arranque de un motor trifásico es el proceso por el cual se pone en marcha una maquina eléctrica. La principal característica para que el arranque de un motor pueda llevarse a cabo es que el par de arranque debe ser superior al par resistente de la carga. Durante el proceso de arranque se da una elevación de corriente lo que puede llegar a ocasionar baja en las líneas de suministro de energía las cuales pueden ser notorias en la iluminación, así como afectar a otros equipos que se encuentren conectados en las mismas líneas de suministro. Desde un punto de vista teórico se puede justificar la elevación de la corriente mediante el circuito equivalente del sistema puesto que la resistencia de carga es nula en el instante inicial y el deslizamiento sería igual a la unidad, por esto el motor ofrecerá una impedancia muy baja y se considera prácticamente en cortocircuito. [1] Debido a la gran elevación de corriente, se han implementado diferentes arrancadores que se encargan de manipular el arranque y paro de los motores. Cabe señalar que los motores pequeños de baja capacidad pueden conectarse directamente a la línea de alimentación, pero en los motores grandes es necesario utilizar arrancadores para.
(19) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. evitar las subidas de corriente durante el arranque. Los arrancadores pueden ser de tipo manual, automático y los más nuevos de estado sólido o arrancadores suaves. 1.2.1 Arrancadores Manuales. Los arrancadores manuales son dispositivos que se definen como reguladores, cuya función primordial es la de manipular la puesta en marcha y la aceleración del motor eléctrico. [1] Los arrancadores manuales de tipo sencillo, pueden ser: a plena tensión o a tensión reducida. La implementación de cada uno de estos sistemas depende del trabajo que realizará, así como del motor adecuado para dicho trabajo. Las ventajas que se obtienen al utilizar arrancadores de tipo manual son [1]: 1. El operador puede variar el tiempo para que la secuencia de operación se lleve a cabo. 2. Los arrancadores de tipo manual son muy sencillos tanto en su fabricación como en su mantenimiento. 3. Existen menores averías, puesto que no se emplean relés ni acoplamientos eléctricos. 4. Cuando se carece de espacio en la instalación los arrancadores manuales son prácticos pues son de menor tamaño. 5. Los costos son mucho más bajos a diferencia de los arrancadores automáticos. 6. Mantenimiento sencillo.. 1.2.2 Arrancadores automáticos. Los arrancadores automáticos están directamente relacionados con los principios de los arrancadores manuales, están diseñados para controlar indirectamente mediante pulsadores de contacto momentáneo los siguientes aspectos [1]: 1. El pico de corriente en el arranque, que puede perturbar el funcionamiento de otros aparatos conectados a la red. 2. Las sacudidas mecánicas que se producen durante los arranques y las paradas pueden ser inaceptables para la máquina, que a su vez garantizan la seguridad y comodidad de los usuarios. Los arrancadores automáticos, se puede decir, que son mejores que los de tipo manual puesto que pueden ser fácilmente operados por un operario inexperto, sin tener complicaciones y evitará que pueda producirse algún daño a la maquinaria. Así como se limita el riesgo de que pueda existir algún error humano por falta de conocimiento. 5.
(20) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Cuando se realiza una selección entre los arrancadores de tipo automático y de tipo manual se deben considerar los siguientes factores [1], así como las ventajas de los arrancadores manuales anteriormente mencionadas. . Los arrancadores automáticos evitan el cansancio del operario en ciclos frecuentes de arranque y parada.. . Se puede controlar a distancia, es decir, que los contactos pueden estar a gran distancia del arrancador y de esta forma proteger al operario de algún accidente.. . Se pueden situar los pulsadores en espacios confinados y debido a sus pequeñas dimensiones se pueden colocar varios para operar diferentes equipos.. . Limitación de errores humanos por falta de conocimientos durante la puesta en marcha (este último punto aplicado completamente con referencia a los arrancadores manuales que por las limitaciones entre el arranque de motor y el tiempo).. Los dispositivos automáticos empleados se clasifican en dos tipos según su funcionamiento: los de bucle abierto y los de bucle cerrado, el de bucle abierto gobierna la potencia de un motor de forma prefijada, independientemente del funcionamiento del motor. En cuantos los de bucle cerrado dependerá en parte del funcionamiento del motor. [1] 1.2.3 Arrancadores Suaves. Este tipo de arrancadores son el equipo más moderno en la actualidad en el control de motores eléctricos, se encargan de disminuir los picos de corriente durante el arranque de motores eléctricos y el par mecánico de arranque. Estos modelos de arrancadores son ideales cuando se requiere un arranque suave y lento, puesto que en lugar de operar a plena tensión utilizan elementos de control para ir aumentando gradualmente el voltaje [1], esto se realiza mediante el ángulo de disparo. Algunas ventajas del uso de los arrancadores suaves pueden ser: . Evitar paros bruscos (en el caso de bandas transportadoras o en un elevador).. . Menor consumo de energía de las líneas de distribución, puesto que reducen los picos elevados de corriente.. . Mayor vida útil de los elementos mecánicos como pueden ser el eje o los acoples del motor.. 6.
(21) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. . Menos esfuerzo en los reductores de velocidad de tipo mecánico, dando una mayor vida útil en cuanto a engranes y cojinetes.. 1.3 Variadores de Velocidad. Un variador de frecuencia (siglas VFD, del inglés: Variable Frequency Drive o bien AFD Adjustable Frequency Drive), son dispositivos electrónicos, que permiten el control completo de motores eléctricos; los hay de C.D. (variación de la tensión), y de C.A. (variación de la frecuencia); los más utilizados son los de motor trifásico de inducción y rotor sin bobinar o variadores de velocidad. [2] Hicieron su aparición a principios de los años 80 con el fin de solucionar los inconvenientes de los variadores de velocidad mecánicos [3]. Los primeros variadores electrónicos en aparecer eran grandes, pesados y muy caros, y debido a los transistores bipolares que empleaban, las resistencias eran elevadas, calentándose de manera importante, por lo que tampoco eran utilizables con motores excesivamente potentes. [4] Los variadores de frecuencia actuales ofrecen una excelente alternativa de automatización de sistemas y control de energía en todo tipo de aplicaciones. Su empleo se ha incrementado enormemente en los últimos años por los grandes beneficios que ofrece en cuanto a costos operativos, mantenimiento y ahorro de energía [5], ésta última tan importante en estos días de gran necesidad de la misma. 1.3.1 Variadores de Velocidad de corriente alterna. Un variador de C.A. es un dispositivo utilizado para controlar la velocidad de rotación de un motor de C.A. o de inducción. Este tipo de motores también se conocen como motores asíncronos o en jaula de ardilla. El variador de velocidad se coloca entre la red y el motor. El variador recibe la tensión de red a la frecuencia de red (50 Hz o 60 Hz) y tras convertirla y después ondularla produce una tensión con frecuencia variable [6]. La velocidad de un motor varía prácticamente proporcional a la frecuencia. Además de cambiar la frecuencia, el variador también varía el voltaje aplicado al motor para asegurar que existe el par necesario en el eje del motor sin que surjan problemas de sobrecalentamiento. [6] Los variadores de frecuencia tienen sus principales aplicaciones en los siguientes tipos de máquinas: Transportadoras. Bombas y ventiladores centrífugos. 7.
(22) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Bombas de desplazamiento positivo. Ascensores y elevadores. Extrusoras. Centrífugas. Prensas mecánicas y balancines. Máquinas textiles. Compresores de aire. Pozos petrolíferos. Cuando comparamos el funcionamiento de un motor con alimentación a través de un variador de velocidad respecto al funcionamiento con alimentación convencional notamos las siguientes ventajas [6]: 1. Menor consumo. Con una alimentación convencional el motor funciona siempre a velocidad nominal. Con un variador la velocidad se ajusta a la velocidad necesaria. Por ejemplo, en bombas de riego para regular el caudal se cierran las llaves de paso mientras que con un variador se reduce la velocidad de funcionamiento consumiendo menos. 2. Instalación más sencilla con menos errores de cableado. 3. Funciones de protección: límite de corriente, fallo de tierra, protección contra caída de tensión, etc. 4. Arranque y paradas suaves. Alarga la vida del motor, evita daños en elementos auxiliares. Por ejemplo, en bombas de pozo las arrancadas y paradas suaves eliminan los golpes de ariete que provocan rotura de válvulas, daños en las bombas, etc. 5. Posibilidad de control y seguimiento por ordenador. Los variadores pueden. enviar información a un ordenador para su posterior análisis. 1.3.2 Variadores de Velocidad de corriente directa. Los variadores de velocidad para C.D. están diseñados para controlar motores de corriente directa que poseen excitación independiente a partir de una alimentación de corriente alterna, monofásica, bifásica o trifásica. Estos dispositivos funcionan controlando el ángulo de disparo, utilizando tecnología de sincronismo directo, lecturas de tensión y corriente optoacopladas y conversión frecuencia sobre voltaje (F/V) de alta precisión en la realimentación. [7]. 8.
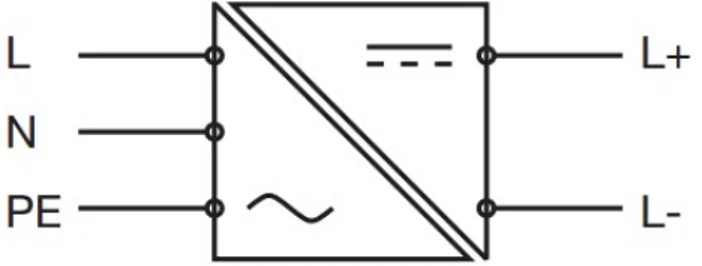
(23) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Estos equipos están fabricados en base a una única placa de control, el circuito de potencia esta interconectado con trazas de alto micronaje o barras, y todos los componentes van montados en un gabinete metálico con disipador integrado. [7] 1.4 Fuentes de Alimentación. En las aplicaciones actuales, por ejemplo, en la ingeniería de control, es esencial tomar la decisión adecuada en cuanto a la selección y la planificación de la fuente de alimentación. Una conexión o un dimensionado incorrectos de la fuente de alimentación pueden afectar gravemente a la seguridad y/o la disponibilidad de toda la instalación. 1.4.1 Diseño eléctrico y su funcionamiento por etapas. El principal objetivo de una fuente de alimentación es de proporcionar un valor de tensión adecuado para el funcionamiento de cualquier dispositivo. La fuente de alimentación se encarga de convertir la entrada de tensión alterna de la red en una tensión continua y consta de varias etapas que son: Transformación, rectificación, filtrado y regulación. [8] Desde una perspectiva simplificada del diseño eléctrico de las fuentes de alimentación, éstas pueden considerarse un dispositivo con una parte de entrada y otra de salida [9]. La parte de entrada y la parte de salida están aisladas eléctricamente entre sí.. Figura 1.1. Perspectiva simplificada del diseño eléctrico.. 1.4.1.1 Etapa de transformación. Esta etapa como se muestra en la figura 1.2 consta básicamente de un transformador que está formado por un bobinado primario y uno o varios bobinados secundario, que tiene como función principal convertir la energía eléctrica alterna de la red, en energía alterna de otro nivel de voltaje, por medio de la acción de un campo magnético. Además, provee una aislación galvánica entre la entrada y la salida. [8]. 9.
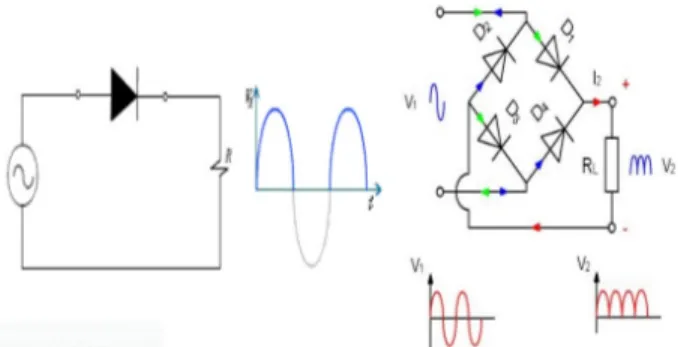
(24) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Figura 1.2. Transformador con un bobinado primario y dos bobinados secundarios.. 1.4.1.2 Etapa de rectificación. Esta etapa queda constituida por diodos rectificadores mostrados en la figura 1.3 cuya función es de rectificar la señal proveniente del bobinado secundario del transformador [8]. Existen 2 tipos de configuraciones que son rectificación de media onda y de onda completa.. Figura 1.3. Circuito de diodos y forma de media onda y onda completa.. 1.4.1.3 Etapa de filtrado. Esta etapa queda constituida por uno o varios capacitores como se muestra en la figura 1.4 que se utilizan para eliminar la componente de tensión alterna que proviene de la etapa de rectificación. Los capacitores se cargan al valor máximo de voltaje entregado por el rectificador y se descargan lentamente cuando la señal pulsante desaparece. Permitiendo lograr un nivel de tensión lo más continua posible. [8]. Figura 1.4. Circuito conformado por capacitores con forma de onda de entrada y salida del mismo.. 10.
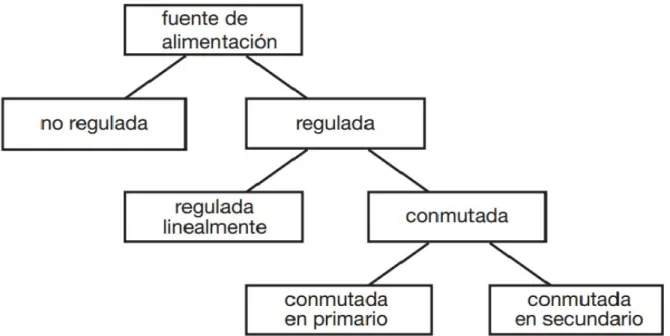
(25) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. 1.4.1.4 Etapa de regulación. Esta etapa consiste en el uso de uno o varios circuitos integrados que tienen la función de mantener constante las características del sistema y tienen la capacidad de mantener el estado de la salida independientemente de la entrada [8]. Esta etapa se puede dividir en: Reguladores lineales y regulador de conmutación (switching). 1.4.2 Tipos de fuentes de alimentación. Existen dos tipos principales de fuentes de alimentación: fuentes de alimentación reguladas y no reguladas. Las fuentes de alimentación reguladas se dividen en fuentes de alimentación reguladas linealmente y fuentes de alimentación conmutadas. [9]. Figura 1.5. Descripción de los tipos de fuetes de alimentación.. 1.5 Rectificadores y su clasificación. La distribución de energía eléctrica se hace, esencialmente, en corriente alterna, debido, principalmente, a la facilidad de adaptación del nivel de tensión por medio de transformadores. En muchas aplicaciones, la carga alimentada requiere una tensión continua. La conversión CA/CC es realizada por convertidores estáticos de energía, comúnmente denominados rectificadores. Por tanto, un rectificador es un sistema electrónico de potencia cuya función es convertir una tensión alterna en una tensión continua. En una primera clasificación, podemos diferenciar los rectificadores de acuerdo con el número de fases de la tensión alterna de entrada (monofásico, bifásico, trifásico, hexafásico, etc.). Dentro de estos, podemos diferenciar los rectificadores en función 11.
(26) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. del tipo de conexión de los elementos (media onda y de onda completa). Otra posible clasificación es según su capacidad de ajustar el valor de la tensión de salida, ello depende de si se emplean diodos o tiristores. Los rectificadores no controlados son aquellos que utilizan diodos como elementos de rectificación, en cuanto que los controlados utilizan tiristores o transistores. [10] 1.5.1 Rectificadores no controlados. A la hora de llevar a cabo la rectificación, se han de utilizar elementos electrónicos que permitan el paso de la corriente en un sentido, permaneciendo bloqueado cuando se le aplique una tensión de polaridad inapropiada. Para ello, en los rectificadores no controlados, como ya se ha comentado, el componente más adecuado y utilizado es el diodo semiconductor. Clasificación de los Rectificadores no controlados: . Rectificador monofásico de media onda.. . Rectificador con transformador de toma media.. . Rectificador en puente.. . Rectificador trifásico de onda completa no controlado con carga resistiva.. . Rectificadores con filtro.. 1.5.2 Rectificadores controlados. Se puede decir que los rectificadores controlados reciben este nombre por que utilizan un dispositivo de control, en este caso el tiristor. Se utilizan las mismas topologías que en el caso de los rectificadores no controlados, pero sustituyendo los diodos por tiristores. La ventaja de utilizar tiristores viene dada por la capacidad de éstos de retardar su puesta en conducción, sucediendo ésta cuando la tensión ánodo-cátodo sea positiva y además reciba un pulso adecuado de tensión y corriente en su puerta [10]. Clasificación de los rectificadores controlados: . Rectificador monofásico controlado de media onda y carga resistiva.. . Rectificador monofásico totalmente controlado.. 1.6 El transformador. Los transformadores desempeñan un papel muy importante en la transportación, suministro y distribución de la energía eléctrica. Son dispositivos estáticos de alta. 12.
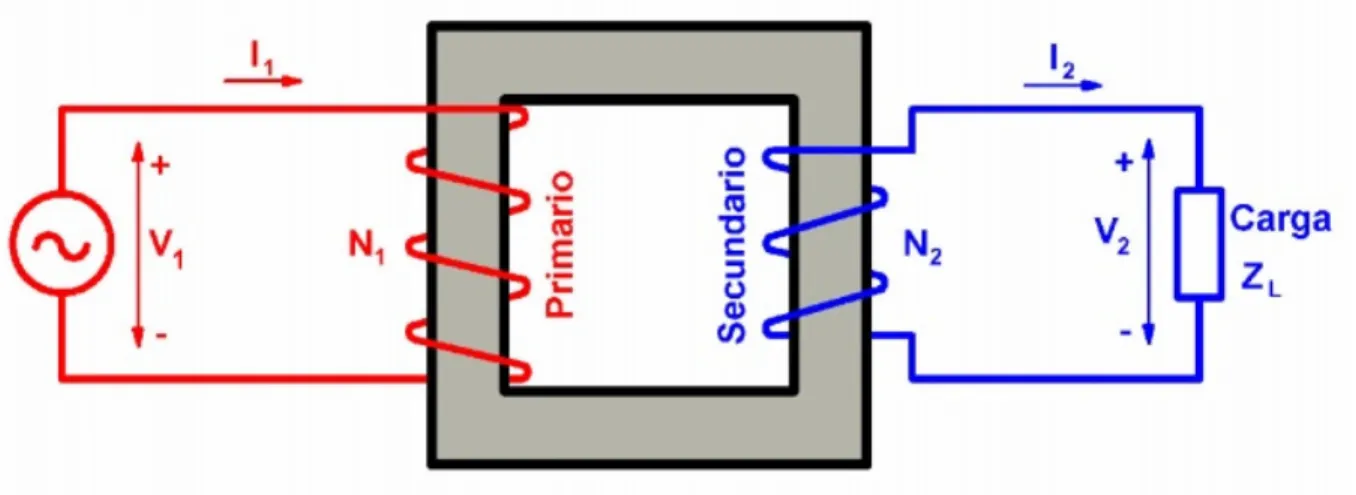
(27) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. eficiencia, con un ciclo de vida alto, pero que necesitan la atención debida para un buen uso y aprovechamiento de sus potenciales. La invención del transformador, constituyó un hito tecnológico que contribuyó sobremanera a la expansión de la energía eléctrica y creó las condiciones para realizar nuevas invenciones y aplicaciones donde dicha energía fuese la fuente inicial. 1.6.1 Descripción de un Transformador. Los transformadores son máquinas estáticas con dos devanados de corriente alterna sobre un núcleo magnético (figura 1.6). El devanado por donde entra energía al transformador se denomina primario y el devanado por donde sale energía hacia las cargas que son alimentadas por el transformador se denomina secundario. El devanado primario tiene N1 espiras y el secundario tiene N2 espiras. El circuito magnético de esta máquina lo constituye un núcleo magnético sin entrehierros, el cual no está realizado con hierro macizo sino con chapas de acero al silicio apiladas y aisladas entre sí. De esta manera se reducen las pérdidas magnéticas del transformador. [11]. Figura 1.6. Principio de funcionamiento de un transformador monofásico.. Al conectar una tensión alterna V1 al primario, circula una corriente por el que genera un flujo alterno en el núcleo magnético. Este flujo magnético, en virtud de la Ley de Faraday, induce en el secundario una fuerza electromotriz (f.e.m.) E2 que da lugar a una tensión V2 en bornes de este devanado [11]. De esta manera se consigue transformar una tensión alterna de valor eficaz V1 en otra de valor eficaz V2 y de la misma frecuencia. Nótese que esta máquina solo vale para transformar tensiones alternas, pero no sirve para tensiones continuas. El devanado de alta tensión (A.T.) es el de mayor tensión y el devanado de baja tensión (B.T.) es el de menor tensión. Un transformador elevador tiene el lado de baja tensión en el primario y el A.T. en el secundario. Un transformador reductor tiene el lado de alta tensión en el primario y el de B.T. en el secundario. 13.
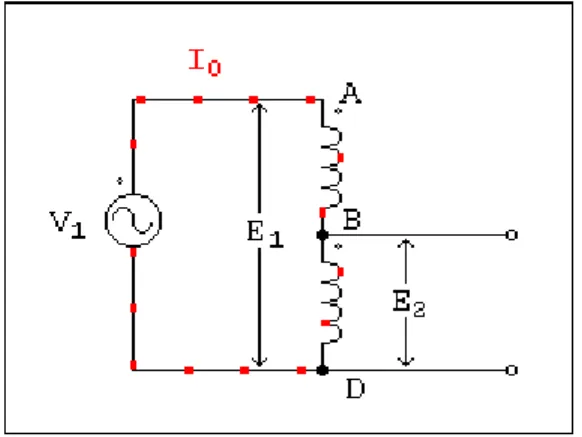
(28) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. El transformador es una máquina reversible. Un mismo transformador puede alimentarse por el lado de A.T. y funcionar como transformador reductor o alimentarse por el lado de B.T. y actuar como un transformador elevador. 1.7 El Autotransformador. El autotransformador es una máquina que funciona como un transformador común el autotransformador se caracteriza por su construcción ya que este tiene un solo bobinado y se caracteriza por tener una alta gama de ventajas. En un autotransformador, la porción común del devanado único actúa como parte tanto del devanado "primario" como del "secundario". La porción restante del devanado recibe el nombre de "devanado serie" y es la que proporciona la diferencia de tensión entre ambos circuitos, mediante la adición en serie con la tensión del devanado común. La transferencia de potencia entre dos circuitos conectados a un autotransformador ocurre a través de dos fenómenos: el acoplamiento magnético (como en un transformador común) y la conexión galvánica (a través de la toma común) entre los dos circuitos De igual manera, un transformador incrementa su capacidad de transferir potencia al ser conectado como autotransformador. 1.7.1 Operación del autotransformador. Tiene un solo bobinado arrollado sobre el núcleo, pero dispone de cuatro bornes, dos para cada circuito, y por ello presenta puntos en común con el transformador. Consta de un bobinado de extremos A y D, al cual se le ha hecho una derivación en el punto intermedio B. Por ahora llamaremos primario a la sección completa A D y secundario a la porción B D, pero en la práctica puede ser a la inversa, cuando se desea elevar la tensión primaria.. Figura 1.7. Operación del Autotransformador.. La tensión de la red primaria, a la cual se conectará el autotransformador, es V1, aplicada a los puntos A y D. mostrados en la figura 7. Como toda bobina con núcleo 14.
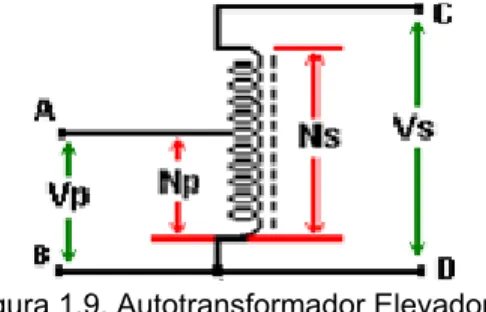
(29) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. de hierro, en cuanto se aplica esa tensión circula una corriente que hemos llamado de vacío. Sabemos también, que esa corriente de vacío está formada por dos componentes; una parte es la corriente magnetízate, que está atrasada 90° respecto de la tensión, y otra parte que está en fase, y es la que cubre las pérdidas en el hierro, cuyo monto se encuentra multiplicando esa parte de la corriente de vacío, por la tensión aplicada [12]. Llamamos a la corriente total de vacío I0. 1.7.2 Tipos de autotransformador Si se aplica una tensión alterna entre los puntos A y B, y se mide la tensión de salida entre los puntos C y D, se dice que el autotransformador es reductor de tensión.. Figura 1.8. Autotransformador reductor. Relación de vueltas Ns / Np < 1 A diferencia del caso anterior si se aplica una tensión alterna entre los puntos C y D, y se mide la tensión de salida entre los puntos A y B, se dice que el autotransformador es elevador de tensión.. Figura 1.9. Autotransformador Elevador. El principio de funcionamiento es el mismo que el del transformador común, entonces la relación de transformación entre las tensiones y las corrientes y el número devueltas se mantiene. Las corrientes primaria y secundaria están en oposición y la corriente total que circula por las espiras en común es igual a la diferencia de la corriente del devanado de baja tensión y el devanado de alta tensión. Para que un autotransformador funcione. Adecuadamente los dos devanados deben tener el mismo sentido de bobinado. [12] Relación de vueltas Ns / Np > 1 15.
(30) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. 1.8 Fusibles. El fusible eléctrico es un dispositivo destinado a proteger una instalación eléctrica y sus componentes contra los cortocircuitos, ocurridos aguas abajo de éste, mediante la fusión de uno o varios elementos destinados para este efecto, interrumpiendo el flujo de la corriente eléctrica cuando esta sobrepasa el valor de la corriente de fusión del fusible dentro de un tiempo determinado. Es conveniente utilizar el nombre “fusible eléctrico” para referirse a este elemento de protección, ya que además existe otra clase de fusible, el cual opera por el exceso de temperatura. El fusible térmico, conocido como TCO (Termal Cut-Off), es un dispositivo de protección que responde cuando la temperatura ambiental excede el grado termal del dispositivo. [13] Los Fusibles se pueden montar de dos maneras: En unos soportes específicos llamados portafusibles. En los seccionadores, en lugar de los casquillos o las barretas. 1.8.1 Partes que componen un fusible. Básicamente los fusibles eléctricos se componen de cinco partes y para su fabricación se utilizan varios tipos de materiales. Cada una de ellas cumple un rol específico y dependiendo del tipo de fusible y su aplicación es posible prescindir de alguna de ellas. Cuerpo fusible. Terminales. Elemento fusible. Medio de extinción del arco eléctrico. Indicador de Funcionamiento.. 1.8.2 Características Eléctricas de los Fusibles. Intensidad nominal (In): Es la cantidad de corriente eléctrica (valor RMS) que el fusible es capaz de conducir indefinidamente sin desconectar. Intensidad Convencional de no-Fusión (Inf): Es el valor determinado de la corriente que puede ser soportado por el fusible sin fundir. Corriente Mínima de Fusión (I3): Es el valor mínimo de la corriente que causa la fusión e interrupción del fusible, varía en un rango de 1.35 a 3 veces la corriente nominal del fusible. Corriente crítica (I2): Dependiendo del diseño del elemento fusible, el valor de la corriente crítica puede variar entre 20 y 100 veces la corriente nominal del fusible. 16.
(31) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Corriente máxima de ruptura (I1): Esta corresponde a la mayor corriente de falla que el fusible es capaz de interrumpir. La corriente del sistema a la hora de seleccionar el fusible debe ser igual o menor que el valor de corriente I1 del fusible. Voltaje Nominal (Vn): Es el máximo valor de tensión a que puede estar sometido el fusible. Capacidad de Ruptura: Es la máxima corriente de cortocircuito que el fusible es capaz de interrumpir a tensión nominal sin que en él se produzcan daños físicos. 1.8.3 Información general de fusibles suministrada por el fabricante. La información técnica relacionada con un fusible, proporcionada por el fabricante, debe ser lo más clara y completa posible para facilitar una correcta comunicación con el usuario. De esta información dependerá el uso correcto de dichos elementos de protección, y de no ser exacta puede ocasionar gastos innecesarios y daños a componentes y equipos del circuito eléctrico. [13] Esta información está referida a los puntos mencionados a continuación. 1. Corriente Nominal (In). 2. Voltaje Nominal (Vn). 3. Capacidad de Ruptura (Irup.) 4. Tipo de corriente (AC o DC) 5. Frecuencia. 6. Clase. 7. Tipo de Fusión. 8. Normas. 9. Curvas de operación.. 1.8.3.1 Clases de fusión de los fusibles. El tipo de fusión es otra característica importante a considerar en la elección de un fusible y dependerá de los tipos de cargas conectadas al circuito que se desea proteger, ya sean reactivas (motores, transformadores, condensadores), resistivas o circuitos electrónicos (semiconductores). La norma IEC ( International Electrotechnical Commission) creó un código para distinguir a los fusibles formado por solamente dos letras, siendo minúscula la primera y mayúscula la restante[13]. Dicho código se encuentra en la publicación IEC269-1 Cláusula 5.7 y en nuestro país está basado en la norma cubana NC 8001:2011[14]. 17.
(32) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Tabla 1.1. Clasificación de los fusibles según su curva de fusión.. Clases de curvas de fusión. g. 1ra. Cartucho fusible limitador de la corriente que es capaz de interrumpir todas las corrientes desde su intensidad asignada(IN) hasta su poder de corte asignado. Cortan intensidades de sobrecarga y de cortocircuito.. Letra. a. Cartucho fusible limitador de la corriente que es capaz de interrumpir las corrientes comprendidas entre el valor mínimo indicado en sus características tiempo-corriente (k2In) y su poder de corte asignado. Cortan solo intensidades de cortocircuito.. 2da Letra. G. Cartuchos fusibles para uso general.. M. Cartuchos fusibles para protección de motores.. Tr. Cartuchos fusibles para protección de transformadores.. B. Cartuchos fusibles para protección de líneas de gran longitud.. R. Cartuchos fusibles para la protección de semiconductores.. D. Cartuchos fusibles con tiempo de actuación retardado.. Fundamentalmente encontraremos dos tipos de fusibles en las instalaciones de baja tensión: 1. gG Fusibles de uso general. 2. aM Fusibles para la protección de motores. Los fusibles de tipo gG se utilizan en la protección de líneas, estando diseñada su curva de fusión "intensidad-tiempo" para una respuesta lenta en las sobrecargas, y rápida frente a los cortocircuitos. [14] Protegen a la vez contra los cortocircuitos y contra las sobrecargas a los circuitos con picos de corriente poco elevados (ejemplo: circuitos resistivos). Normalmente deben tener un calibre inmediatamente superior a la corriente del circuito protegido a plena carga. [14]. 18.
(33) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. 1.9 Contactores. Un contactor es un componente electromecánico que tiene por objetivo establecer o interrumpir el paso de corriente, ya sea en el circuito de potencia o en el circuito de mando, tan pronto se dé tensión a la bobina (en el caso de ser contactores instantáneos). Un contactor es un dispositivo con capacidad de cortar la corriente eléctrica de un receptor o instalación, con la posibilidad de ser accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o de reposo, cuando no recibe acción alguna por parte del circuito de mando, y otra inestable, cuando actúa dicha acción. Este tipo de funcionamiento se llama de "todo o nada". En los esquemas eléctricos, su simbología se establece con las letras KM seguidas de un número de orden. Si bien constructivamente son similares a los relés, no son lo mismo. Su diferencia radica en la misión que cumple cada uno: ambos permiten controlar de forma manual o automática, ya sea localmente o a distancia toda clase de circuitos, pero mientras que los relés controlan corrientes de bajo valor como las de circuitos de alarmas visuales o sonoras, alimentación de contactores, etc.; los contactores se utilizan como interruptores electromagnéticos en la conexión y desconexión de circuitos de iluminación y fuerza motriz de elevada tensión y potencia. 1.9.1 El contactor electromagnético. El contactor electromagnético es un aparato mecánico de conexión controlado mediante electroimán y con funcionamiento todo o nada. Cuando la bobina del electroimán está bajo tensión, el contactor se cierra, estableciendo a través de los polos un circuito entre la red de alimentación y el receptor. El desplazamiento de la parte móvil del electroimán acciona las partes móviles de los polos y de los contactos auxiliares o, en determinados casos, del dispositivo de control de éstos, puede ser [15]: – rotativo, girando sobre un eje. – lineal, deslizándose en paralelo a las partes fijas. – una combinación de ambos. Cuando se interrumpe la alimentación de la bobina, el circuito magnético se desmagnetiza y el contactor se abre por efecto de: – los resortes de presión de los polos y del resorte de retorno de la armadura móvil. – la fuerza de gravedad, en determinados aparatos (las partes móviles recuperan su posición de partida). El contactor ofrece numerosas ventajas, entre las que destacan la posibilidad de [15]:. 19.
(34) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. – interrumpir las corrientes monofásicas o polifásicas elevadas accionando un auxiliar de mando recorrido por una corriente de baja intensidad. – funcionar tanto en servicio intermitente como en continuo. – controlar a distancia de forma manual o automática, utilizando hilos de sección pequeña o acortando significativamente los cables de potencia. – aumentar los puestos de control y situarlos cerca del operario. A estas características hay que añadir que el contactor: – es muy robusto y fiable, ya que no incluye mecanismos delicados. – se adapta con rapidez y facilidad a la tensión de alimentación del circuito de control (cambio de bobina). – garantiza la seguridad del personal contra arranques inesperados en caso de interrupción de corriente momentánea (mediante pulsadores de control). – facilita la distribución de los puestos de paro de emergencia y de los puestos esclavos, impidiendo que la máquina se ponga en marcha sin que se hayan tomado todas las precauciones necesarias. – protege el receptor contra las caídas de tensión importantes (apertura instantánea por debajo de una tensión mínima). – puede incluirse en equipos de automatismos sencillos o complejos. 1.10. Disyuntores.. Es un dispositivo capaz de interrumpir o abrir un circuito eléctrico cuando la intensidad de la corriente eléctrica que por él circula excede de un determinado valor o, en el que se ha producido un cortocircuito, con el objetivo de no causar daños a los equipos eléctricos. A diferencia de los fusibles, que deben ser reemplazados tras un único uso, el disyuntor puede ser rearmado una vez localizado y reparado el problema que haya causado su disparo o desactivación automática. 1.10.1 Los Disyuntores Magnéticos. Un disyuntor magnético es un interruptor automático que utiliza un electroimán para interrumpir la corriente. En funcionamiento normal, ésta pasa por la bobina del electroimán creando un campo magnético débil. Si la intensidad es mayor de un determinado valor, el campo magnético creado es suficientemente fuerte como para poner en funcionamiento un dispositivo mecánico que interrumpe la corriente eléctrica. Dependiendo del tipo de circuito que se desea proteger (distribución, motor, etc.), el umbral de disparo magnético se situará entre 3 y 15 veces la corriente nominal, 20.
(35) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. protegiendo al circuito de posibles cortocircuitos, dentro de los límites de su poder de corte a través de disparadores magnéticos (un disparador por fase). Dependiendo del tipo de disyuntor, dicho umbral de disparo puede ser fijo o ajustable por el usuario. [16] También protegen contra los contactos indirectos, siguiendo las normas sobre regímenes de neutro, para los esquemas TN o IT. Los esquemas TT pueden necesitar una protección diferencial residual. Todos los disyuntores pueden realizar cortes omnipolares: la puesta en funcionamiento de un solo disparador magnético basta para abrir simultáneamente todos los polos. Cuando la corriente de cortocircuito no es muy elevada, los disyuntores funcionan a mayor velocidad que los fusibles. 1.10.2 El Disyuntor Motor Magnetotérmico (Guardamotores). Este dispositivo agrupa, en un solo bloque, las funciones de: . Interruptor. . Protección contra las sobreintensidades. . Sobrecargas (relé térmico). . Cortocircuitos (fusibles). Los disyuntores de motor magnetotérmicos o interruptores automáticos de motor utilizan el mismo principio de protección que los interruptores magnetotérmicos. Si se utilizan interruptores automáticos con protección magnetotérmica se deben elegir aparatos que están especialmente concebidos para la protección de motores. Los disyuntores de motor magnetotérmicos o guardamotores están especialmente diseñado para la protección de motores eléctricos. Este diseño especial proporciona al dispositivo una curva de disparo que lo hace más robusto frente a las sobreintensidades transitorias típicas de los arranques de los motores. El disparo magnético es equivalente al de otros interruptores automáticos pero el disparo térmico se produce con una intensidad y tiempo mayores. [16] La protección térmica tiene compensación de temperatura y sensibilidad a una ausencia de fase. Es apto para el seccionamiento. Existen dos versiones: . con pulsadores de control Marcha-Paro.. . con mando de control giratorio.. 21.
(36) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. 1.11. Interruptores.. Es un dispositivo utilizado para desviar o interrumpir el curso de una corriente eléctrica. En el mundo moderno las aplicaciones son innumerables, van desde un simple interruptor que apaga o enciende un bombillo, hasta un complicado selector de transferencia automático de múltiples capas controlado por computadora. Se sirven del movimiento de un núcleo de hierro dentro de un campo magnético proporcional al valor de la intensidad que circula. 1.11.1 El interruptor y el interruptor seccionador. El interruptor es un aparato mecánico de conexión capaz de establecer, tolerar e interrumpir corrientes en un circuito en condiciones normales, incluidas las condiciones de sobrecarga durante el servicio, y tolerar durante un tiempo determinado corrientes dentro de un circuito en condiciones anómalas, como en caso de un cortocircuito. [14] El mecanismo vinculado al dispositivo de mando manual garantiza la apertura y el cierre brusco de los contactos, independientemente de la velocidad de accionamiento del operario. Por lo tanto, el interruptor está diseñado para ser manejado con carga con total seguridad. Sus características se basan en las categorías de empleo y normativas utilizadas para clasificar los circuitos cuya alimentación resulta más o menos difícil de establecer o interrumpir en función del tipo de receptores utilizados [15]. Los interruptores que cumplan las condiciones de aislamiento especificadas en las normas para los seccionadores son interruptores seccionadores, aptitud que el fabricante debe certificar marcando el aparato con un símbolo. Los interruptores y los interruptores seccionadores se pueden completar con un dispositivo de enclavamiento y según el caso, con fusibles. Los interruptores seccionadores se caracterizan por la posibilidad de completar y modificar la composición de los aparatos básicos, para adaptarlos con la mayor precisión a nuevas necesidades, utilizando los siguientes módulos adicionales [15]: – polos de potencia. – polos neutros de cierre anticipado y de apertura retardada. – barretas de tierra. – contactos auxiliares de cierre y de apertura. – bloques de conexión reversibles que permiten cablear desde la parte frontal o posterior.. 22.
(37) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. Los interruptores seccionadores de mando giratorio ampliables con módulos pueden realizar las funciones de interruptor principal, de paro de emergencia o de control manual de los motores. 1.11.2 Interruptores diferenciales. Los dispositivos diferenciales son un medio eficaz para la protección de las personas contra los riesgos de la corriente eléctrica en baja tensión como consecuencia de un contacto directo. El objetivo de los dispositivos diferenciales residuales (DDR), es detectar las corrientes de defecto de fuga a tierra y actuar interrumpiendo el circuito en caso de que dichas corrientes supongan un peligro para las personas o los bienes. [17] Los dispositivos diferenciales residuales constituyen también un elemento de vigilancia del aislamiento de los cables y de los receptores eléctricos. Podemos clasificar a los interruptores diferenciales atendiendo a alguna de las características siguientes: 1. Tipología del aparato. 2. Forma de onda a la que el aparato es sensible (clase AC, A, B). 3. Sensibilidad de disparo. 4. Tiempo de disparo. 1.12. Dispositivos de control.. La adquisición de datos integra el conjunto de los componentes que proporcionan información sobre el estado de un producto, una máquina o una instalación. Dichos componentes pueden detectar un estado, controlar un umbral, seguir la posición de un móvil o identificar un objeto y sus características. En base a su tecnología, los dispositivos de control como los interruptores de posición electromecánicos, los finales de carrera y los detectores de proximidad inductivos, capacitivos y fotoeléctricos detectan los estados, controlan la presencia, la ausencia o el paso de un objeto además de su color o tamaño. 1.12.1 Aparatos de control. Los aparatos de control son un complemento de los componentes electromecánicos. Son indispensables en muchos casos para el buen funcionamiento de las instalaciones y los equipos automáticos. Estos productos controlan la posición de un móvil, el nivel de un líquido y la presión.. 23.
(38) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. 1.12.2 Final de carrera. Dentro de los componentes electrónicos, el final de carrera o sensor de contacto dispositivos eléctricos, neumáticos o mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo una cinta transportadora, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener interruptores normalmente abiertos (NA o NO en inglés), cerrados (NC) o conmutadores dependiendo de la operación que cumplan al ser accionados, de ahí la gran variedad de finales de carrera que existen en mercado. [18] Generalmente estos sensores están compuestos por dos partes: un cuerpo donde se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es muy diverso, empleándose, en general, en todas las máquinas que tengan un movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija, es decir, aquellas que realicen una carrera o recorrido fijo, como por ejemplo ascensores, montacargas, etc. Los finales de carrera están fabricados en diferentes materiales tales como metal, plástico o fibra de vidrio. 1.12.3 Detectores de proximidad inductivos. Estos aparatos se utilizan principalmente en aplicaciones industriales. Detectan cualquier objeto metálico sin necesidad de contacto: control de presencia o de ausencia, detección de paso, de atasco, de posicionamiento, de codificación y de contaje. Los detectores de proximidad inductivos aportan numerosas ventajas: Compatibilidad con los automatismos electrónicos gracias a la posibilidad de cadencias elevadas. Durabilidad independiente del número de ciclos de maniobra (ninguna pieza móvil y, por tanto, sin desgaste mecánico, contactos de salida estáticos) Adaptación a ambientes húmedos, corrosivos y con atascos. Detección de objetos frágiles, recién pintados.. Un detector de proximidad inductivo detecta la presencia de cualquier objeto de material conductor sin necesidad de contacto físico. Consta de un oscilador, cuyos bobinados forman la cara sensible, y de una etapa de salida. El oscilador crea un campo electromagnético alterno delante de la cara sensible. La frecuencia del campo varía entre 100 y 600 kHz según el modelo. Cuando un objeto conductor penetra en este campo, soporta corrientes inducidas circulares que se desarrollan a su alrededor (efecto piel). Estas corrientes constituyen una sobrecarga para el sistema oscilador y provocan una reducción de la amplitud de las oscilaciones a medida que se acerca el objeto, hasta bloquearlas por completo. La detección del objeto es efectiva cuando la 24.
(39) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. reducción de la amplitud de las oscilaciones es suficiente para provocar el cambio de estado de la salida del detector. [15] 1.12.4 Detectores capacitivos. Los detectores capacitivos son adecuados para detectar objetos o productos no metálicos de cualquier tipo (papel, vidrio, plástico, líquido, etc.). Un detector de posición capacitivo se compone de un oscilador cuyos condensadores forman la cara sensible [15]. Cuando se sitúa en este campo un material conductor o aislante de permitividad superior a 1, se modifica la capacidad de conexión y se bloquean las oscilaciones. Estos detectores disponen de un potenciómetro de regulación de sensibilidad. 1.12.5 Detectores fotoeléctricos. Los detectores fotoeléctricos permiten detectar todo tipo de objetos (opacos, transparentes, reflectantes, etc.) en gran variedad de aplicaciones industriales. Disponen de: ● Cinco sistemas básicos: – barrera. – réflex. – réflex polarizado. – proximidad. – proximidad con borrado del plano posterior. ● Aparatos compactos, en miniatura, de cabeza óptica separada, de fibra óptica, ● Modelos con caja de resina sintética, ofrecen una solución óptima para el tipo de objeto que se detecta, el espacio disponible y las condiciones ambientales. Un detector fotoeléctrico detecta un objeto o una persona por medio de un haz luminoso. Sus dos componentes básicos son un emisor y un receptor de luz. La detección es efectiva cuando el objeto penetra en el haz de luz y modifica suficientemente la cantidad de memoria que llega al receptor para provocar el cambio de estado de la salida[15]. Para ello, se siguen dos procedimientos: – bloqueo del haz por el objeto detectado. – retorno del haz sobre el receptor por el objeto detectado. Los detectores fotoeléctricos disponen de un emisor de diodo electroluminiscente y de un receptor de fototransistor. Estos componentes se utilizan por su elevado rendimiento luminoso, su insensibilidad a los golpes y a las vibraciones, su resistencia 25.
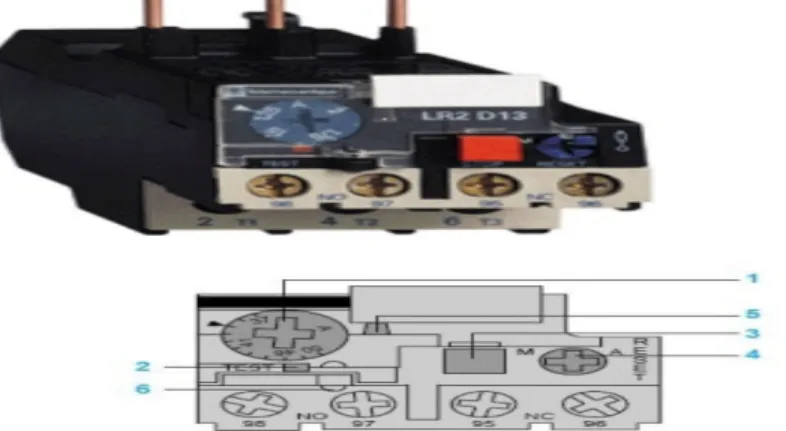
(40) CAPÍTULO 1. DISPOSITIVOS DE CONTROL Y PROTECCIÓN. a la temperatura, su durabilidad prácticamente ilimitada y su velocidad de respuesta. Dependiendo del modelo de detector, la emisión se realiza en infrarrojo o en luz visible verde o roja. La corriente que atraviesa el LED emisor se modula para obtener una emisión luminosa pulsante e insensibilizar los sistemas a la luz ambiental. [15] 1.12.6 Sistema de barrera Emisor-Receptor. El emisor y el receptor se sitúan en dos cajas separadas. Es el sistema que permite los mayores alcances, hasta 100 m con ciertos modelos. El haz se emite en infrarrojo o láser. A excepción de los objetos transparentes, que no bloquean el haz luminoso [15], puede detectar todo tipo de objetos (opacos, reflectantes...) gracias a la excelente precisión que proporciona la forma cilíndrica de la zona útil del haz. Los detectores de barrera disponen de un margen de ganancia muy amplio. Por ello, son muy adecuados para los entornos contaminados (humos, polvo, intemperie, etc.). Es necesario alinear cuidadosamente el emisor y el receptor. Ciertos modelos disponen de diodos electroluminiscentes que facilitan la alineación mediante el control de la intensidad del haz luminoso que llega al receptor. Además de cumplir esta función de ayuda, los diodos indican si un exceso de acumulación de suciedad en los componentes ópticos puede llegar a provocar defectos de detección. 1.13 Relé Térmico. Los relés térmicos bimetálicos constituyen el sistema más simple y conocido de la protección térmica por control indirecto, es decir, por calentamiento del motor a través de su consumo. Son los que realizan una maniobra mediante el principio de la ley de Joule (calor producido por el paso de una corriente). El relé térmico se basa en la dilatación de los metales al calentarse. Tras cierto tiempo de permanecer un relé térmico atravesado en sus bimetales por la intensidad a controlar y si ésta fuera elevada (sobrecarga), se producirá un curvamiento hacia el lado opuesto al metal que más se dilata (sentido del de menor coeficiente). Igual efecto se produce si la intensidad no la recorre, pero la calienta indirectamente. [16] Esta deformación de la lámina bimetálica es aprovechada para accionar uno o dos contactos auxiliares, es decir, que el NC abre y el NO cierra. Un relé térmico dispone en su parte frontal de los siguientes dispositivos: 1. Ajuste Ir: Escala o dial para fijar la intensidad de régimen del motor. 2. Pulsador Test: Accionando el pulsador Test es posible: Controlar el cableado del circuito de control. Simular el disparo del relé (acción sobre los 2 contactos “NC” y “NA”). 26.
Figure
+7

Documento similar
