PS 2315 Introducción al Modelaje de Sistemas Dinámico pdf
71
0
0
Texto completo
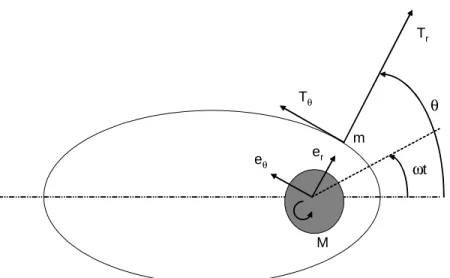
(2) los valores iniciales x1 ( 0 ) ; x2 ( 0 ) ; : : : ; xn ( 0 ); y el vector de entrada u( ) para 0 , se puede determinar unívocamente la trayectoria futura de estado del sistema x ( ) ; 0 conjuntamente con el vector respuesta del sistema y ( ) para todo : 0 Una vez asignadas n variables como las componentes o variables de estados de la planta P; se de…ne como vector de estado del sistema a x( ) = [x1 ( ); x2 ( ); : : : ; xn ( )]T r , (la operación T r es transposición matricial). Mas aún, al entero positivo n que representa el número de variables de estados se le denomina orden o dimensión del sistema P: Lo que se asigna como vector de estado a un sistema dado puede corresponder al uso de cantidades físicas bien de…nidas (voltages, corrientes, velocidades, posiciones, etc) o consecuencia de otras consideraciones (además de las físicas) tales como las consideradas en el cálculo o solución de las ecuacione dinámicas del sistema. Por ejemplo para sistemas mecánicos se sebe que al conocer las velocidades de las masas y las posiciones de los resortes en una red mecánica en un instante de tiempo dado, es posible predecir el comportamiento futuro del sistema mecánico dado sin recurrir a información mas anterior de la considerada. Las velocidades de las masas y las posiciones de los resortes constituyen el estado del sistema bajo estudio. Las leyes de Newton permiten determinar la evolución del estado. Esto se ilustra en los siguientes ejemplos. Ejemplo 2 (ver( 1 )). Considere la planta P : ”Satélite en órbita con la Tierra” mostrada en la …gura (1). Se supone que la masa del satélite, m; será constante bajo la acción de la fuerza de gravedad de la tierra. El planeta es una esfera homogénea que gira a una velocidad angular constante !, y su centro es un punto …jo en el espacio. El problema de control consiste en mantener al satélite en una órbita circular sobre una posición deseada, de…nida por la distancia del centro de la tierra al satélite r; sujeta a todas las perturbaciones que tienden a mover al satélite fuera de la trayectoria establecida. Esto es se buscan torques Tr y T tal que el radio r (t) del satélite sea constante y (t) ! !t donde ! representa la velocidad angular de la tierra y es el ángulo del satélite a partir de la dirección de una dirección de una línea base …ja (la línea horizontal punteada de la …gura). En la …gura se muestran los vectores unitarios ~er ; ~e y ~ez (este último en dirección saliendo del papel que coincide con el polo norte de la tierra) que de…nen los ejes de coordenadas El vector de posición para el satélite está dada por ~r (t) = r~er y la velocidad angular del sistema giratorio es d dt. ~ (t) = W. ~er. Es posible demostrar aplicando las leyes de Newton en las direcciones r y. 2. que.
(3) las ecuaciones de movimiento del satélite son " # 2 d2 r (t) d (t) m r (t) = Tr (t) dt2 dt m r (t). dr (t) d (t) d2 (t) +2 dt2 dt dt. Mm r2 (t). = T (t). donde es la constante de gravitación universal. De…na como variables de estados x1 (t) = r (t) ; x2 (t) =. dr(t) dt ;. x3 (t) = (t). !t; x4 (t) =. d (t) dt. (2). las entradas al sistema se tomarán como u1 (t) =. Tr (t) m ;. u2 (t) =. T (t) m. En consecuencia las ecuaciones de estados de la planta serán x_ 1 (t) = x2 (t) = f1 (x (t) ; u (t)) m = f2 (x (t) ; u (t)) x_ 2 (t) = x1 (t) x24 (t) + xM 2 (t) + u1 (t) 1 x_ 3 (t) = x4 (t) ! = f3 (x (t) ; u (t)) (t) 4 (t) x_ 4 (t) = 2x2x(t)x + ux12 (t) = f4 (x (t) ; u (t)) 1 (t) Ahora supóngase que se utiliza un radar para hacer las mediciones. En general, se podrá medir solamente una parte del estado a algunas funciones que involucren solo parte del estado. Suponga que solo se puede medir r y !t y que las mediciones son exactas; entonces, las ecuaciones de salida del sistema son y1 (t) = x1 (t) = g1 (x (t) ; u (t)) y2 (t) = x3 (t) = g1 (x (t) ; u (t)) En general se supone que el conjunto de entradas que se aplicarán a la planta es u. =. u 2 L2 [0; 1) : kuk2. Tmax m. donde Tmax es magnitud máxima que puede soportar el satélite. En este caso, las variables de estados x1 (t) ; x2 (t) ; x3 (t) y x4 (t) empleadas (ver (2)) tienen un signi…cado físico de…nido, ya que cada una de ellas representa una variable física relevante a la representación dinámica de la planta considerada. Si para una planta dada P se encuentra un vector de estados x (t) el cual cumple con las hipótesis arriba exigidas, entonces uno de los modelos en variables de estados para representar sistemas no-lineales es :. x(t) = f (x(t); u(t); t) y(t) = g(x(t); u(t); t) donde 3. (3).
(4) Tr. Tθ. θ m. eθ. er. ωt. M. Figure 1: Satélite en órbita con la Tierra. T = R+ = [0; 1) 8t 2 R+ ; x (t) 2 Rn es el estado de la planta en el instante t: 8t 2 R+ ; u (t) 2 Rnu es la entrada o ley de control de la planta en el instante t: 8t 2 R+ ; y (t) 2 Rny es la salida o variable controlada de la planta en el instante t: f : Rn. R nu. R+ ! R n. g : Rn. R nu. R + ! R ny. :. La relación x(t) = f (x(t); u(t); t) se le denomina ecuación de estado, mientras que a y(t) = G(x(t); u(t); t) se le conoce como ecuación de salida de la planta.. Es interesante observar que las ecuaciones de estados de un sistema dado P; 3, representan un conjunto de ecuaciones diferenciales de primer orden. Este tipo de modelo no es nada restrictivo, ya que si sucede que la planta P está descrita por una ecuación diferencial escalar de orden n como la que se muestra a continuación dn y (t) = dtn. y (t) ;. dy (t) ; dt. ;. dn 1 y (t) ; u (t) ; t dtn 1. (4). entonces, manipulando dicha relación es posible transformarla en la forma 3. Para eso de…na x1 (t) = y (t) ;. x2 (t) =. d dt y (t) ;. 4. :::;. xn (t) =. dn dtn. 1 1. y (t).
(5) y se tiene que 4 es equivalente a :. :. x1 (t) = : x2 (t) = .. .. x2 (t) x3 (t) .. .. xn 1 (t) = xn (t) : xn (t) = (x1 (t) ; x2 (t) ; : : : ; xn (t) ; u (t) ; t) Y observe que dichas relaciones coincide con 3 si se toma x(t) = [x1 (t); x2 (t); : : : ; xn (t)]T r Tr f (x (t) ; u (t) ; t) = [x2 (t); : : : ; xn (t); (x1 (t) ; x2 (t) ; : : : ; xn (t) ; u (t) ; t)] Ejemplo 3 (Sistemas Robóticos) Las ecuaciones dinámicas que describen un robot rígido es M (q) q• + V (q; q) _ + G (q) = (5) donde M (q) es una matriz de inercia n n, q y sus derivadas son vectores de dimensión n 1 de coordenadas generalizadas, y V (q; q), _ G (q)y son vectores de dimensión n 1 que contienen los torques dependientes de velocidades, los torques de gravedad, y los torques de entrada respectivamente. Suponga que se de…ne como vector de estados x (t) =. x(1) (t) q (t) : = 2 R2n ; q (t) x(2) (t) x(1) (t) 2 Rn ; x(2) (t) 2 Rn. (6). y que el vector de entrada es u (t) = (t) ; y que la salida de este sistema es y (t) = q (t) : Ahora bien, es posible demostrar que todos los sistemas robóticos son tales que la matriz de inercias M (q (t)) es invertible para todo t. Por lo tanto :. :. q (t) :: q (t). =. q (t) M 1 (q (t)) [V (q (t) ; q_ (t)) + G (q (t))] q (t) : y (t) = [In ; 0] q (t). +. M. 1. 0 (q (t)). (t). (7) Finalmente, usando la de…nición 6 se puede expresar 7 como d dt x. =. d dt. x(1) x(2). = =. 1. (1). (1). x(2) ;x + Gx(1) + M (2). M x V x f1 (x (t) ; u (t)) = f (x (t) ; u (t)) f1 (x (t) ; u (t)). 1. x(1) u. (8) donde f1 (x (t) ; u (t)) = x(2) y. 5.
(6) f1 (x (t) ; u (t)) =. M. 1. x(1). V x(1) ; x(2) + Gx(1) + M. 1. x(1) u. Mientras que la ecuación de salida será y (t) = [In ; 0]x (t) = g (x (t) ; u (t)). (9). Por lo tanto, mediante las relaciones 8 y9 hemos obtenido un modelo de 5 de la forma mostrada en 3 Teorema 4 Sea P una planta continua, de dimensión …nita y causal descrita por las ecuaciones de estados 3. Si P es lineal, entonces el mencionado modelo se convierte en d dt x(t) = A (t) x(t) + B (t) u(t) y(t) = C (t) x(t) + D (t) u(t) donde para todo t 2 R+ ; A (t) 2 Rn n ; B (t) 2 Rn Rny nu , con n la dimensión del sistema.. nu. ; C (t) 2 Rny. n. ; D (t) 2. A continuación presentamos un ejemplo sencillo que permite ilustrar la manera en que se seleccionan las variables de estados. Ejemplo 5 Sea P una planta continua, escalar, de parámetros concentrados, di con entrada u 2 U = fu 2 L2 [0; +1) : dt i u existen para i = 1; 2; :::; mg: Descrito por la ecuación diferencial Entrada/Salida siguiente: dn y (t) + an dtn. 1. dy n 1 (t) + dtn 1. + a0 y(t) = bm+1. dm u (t) + dtm. + b0 u(t). Ahora, recuerde que para resolver esta ecuación diferencial de orden n, o sea, calcular y(t) para todo t t0 , dado u (t) ; t t0 ; se requiere n-condiciones iniciales (CI’s). Generalmente dichas CI’s son 0. y(t0 ); y (t0 ); : : : ; y (n. 1). (t0 ). (10). Por lo tanto, si se de…nen x1 (t0 ) = y (t0 ) 0 x2 (t0 ) = y (t0 ) .. . xn (t0 ) = y (n. 1). (t0 ) 0. se observa de inmediato, que conociendo x (t0 ) = (x1 (t0 ) ; x2 (t0 ) ; ; xn (t0 )) (las CI’s, ?? conjuntamente con el segmento de entrada fu (t) : t t0 g, es su…ciente para determinar x (t) e y (t) para todo t t0 : En otras palabra, x (t) = 0 : y (t) ; y (t) ; ; y (n) (t) cali…ca como vector de estado de la planta P dada. Mas aún, las variables de estados seleccionadas de esta manera se conocen con el nombre de variables de fase.. 6.
(7) Sea P una planta continua, de dimensión …nita, causal e invariante en el tiempo descrita por las ecuaciones de estados 3. Si P es lineal, entonces el mencionado modelo se convierte en d dt x(t). = Ax(t) + Bu(t) y(t) = Cx(t) + Du(t). (11). donde para todo A 2 Rn n ; B 2 Rn nu ; C 2 Rny n ; D 2 Rny nu , con n la dimensión del sistema. En cuyo caso expresaremos 11 usando la siguiente estructura de datos: A B P : C D n;x. 2. Formulación de las Ecuaciones de Estados para un Sistema Físico. Existen diversas maneras para formular las ecuaciones de estados de una planta dada P: En esta sección se presentará un método bastante sistemático para plantear dichas ecuaciones. Lo primero que hay que suponer es que toda planta física P puede representarse en términos de las interacciones entre un número …nito de elementos agrupados. Sin embargo, el propósito no es ser exhaustivo en el tratamiento, sino ilustrar el procedimiento para los siguientes tipos de plantas: Sistemas Eléctricos, Sistemas Mecánicos Traslacionales, Sistemas Mecánicos Rotacionales, Sistemas Electromecánicos.. 2.1. Modelaje en Variables de Estados de Redes Eléctricas Lineales. A continuación se establecerá una regla general para la derivación de las ecuaciones de estados de una planta P constituida solo por elementos eléctricos pasivos, y luego se presentarán ejemplos para ilustrar el uso de la técnica. Estos ejemplos servirán también para demostrar la di…cultades que se pueden encontrar con la aplicación del procedimiento de modelaje. El procedimiento para establecer las ecuaciones de estados de una red eléctrica P mediante la asignación de variables físicas correspondientes a variables asociadas a los elementos acumuladores de energía, se muestra a continuación:. 7.
(8) 1. Identi…que cada la corriente de cada inductor y el voltaje de cada condensador con una componente del vector de estado x. Naturalmente, corrientes de diferentes inductores y diferentes condensadores le corresponderán diferentes entradas (a pesar de que los valores nominales de los inductores o condensadores sean idénticos). 2. Use la ley de corrientes o la ley de voltajes de Kirchho¤ para escribir una ecuación que solo involucre una de las componentes de dx dt ; pero que no involucre cualquier componente del vector de salida y o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 3. Use la ley de corrientes o la ley de voltajes de Kirchho¤ para escribir una ecuación que solo involucre una de las componentes de y; pero que no involucre cualquier componente del vector dx dt o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 4. Organice las ecuaciones derivadas en el paso (2) como d x(t) = Ax(t) + Bu(t) dt y a aquellas derivadas en el paso (3) como y(t) = Cx(t) + Du(t) Es posible sistematizar aún más la deducción de las ecuaciones dinámicas de la planta (pasos (1) y (2)) mediante los llamados métodos de lazos y de nodos. Con el objeto de ilustrar la aplicación de dichos métodos considere la el sistema eléctrico con varias mallas mostrado en la …gura (2.1) y el mismo circuito pero ahora visto como una red con múltiples nodos (ver …gura (2.1)). Método de Lazo Considere en este caso el sistema mostrado en la …gura (2.1), y considere como objetivo expresar las corrientes de lazo en términos de las fuentes de tensión aplicadas a la red. Dibuje una corriente de lazo alrededor de cada lazo cerrado del la red en sentido horario, y luego escriba la ecuación de voltaje Kirchho¤ para cada lazo. En este caso se tienen tres lazos, y en consecuencia se obtienen tres ecuaciones 1 1 i1 (t) R1 i2 (t) i3 (t) = e (t) C C R1 i1 (t) + (R1 + R2 + L ) i2 (t) R2 i3 (t) = 0 1 1 i1 (t) R2 i2 (t) + R1 + R3 + i3 (t) = 0 C C R1 +. donde para sistemas de tiempo continuo. 8. =. d dt :.
(9) L. I2 R2. R1. + e. c. I1. I3. v0. R3. Las ecuaciones anteriores pueden expresarse en forma matricial como: 2 32 3 2 3 1 R1 + C1 R1 i1 (t) e (t) C 4 5 4 i2 (t) 5 = 4 0 5 R1 (R1 + R2 + L ) R2 1 1 i3 (t) 0 R R + R + 2 1 3 C C | {z } Q( ). Noten que la matriz de operadores Q ( ) es simétrica, y sus elementos son funciones racionales reales en el operador :. Método de Nodos Los nodos de la red eléctrica se identi…can con letras tal como se muestra en la …gura (2.1). Ahora se aplica la ley de corrientes de Kirchho¤ en cada uno de los nodos en términos de los voltajes de nodos, donde el nodo d se ha tomado como referencia o tierra. Por ejemplo, el voltaje vbd es el voltaje en el nodo b con referencia al voltaje en el nodo d: Por simplicidad, el voltaje vbd se representa por vb : El objetivo principal de un análisis de nodos de una red consiste en expresar los voltajes de nodos en términos de las fuentes de corrientes aplicadas a la red. En este caso, ya que el voltaje en el nodo a se conoce, va (t) = e (t) ; solo se desconocen los voltajes de nodos vb y vc ; y en consecuencia, solo se requieren dos ecuaciones i1 (t) + i2 (t) + i3 (t) = 0 i3 (t) + i4 (t) + i5 (t) = 0. 9.
(10) L. R1 a. c. e. I5. I3. I2. I1. +. I4. R2. b. v0. C. R3. d. y en términos de los voltajes de nodos se obtiene vb (t). va (t) vb (t) vc (t) + C vb (t) + = 0 R1 R2 vc (t) vb (t) vc (t) 1 (vc e (t)) = 0 + + R2 R3 L. Reorganizando lo términos para luego sistematizar la forma …nal 1 1 1 +C + vb (t) vc (t) R1 R2 R2 1 1 1 1 vb (t) + + + vc (t) R2 R2 R3 L o en forma matricial 2 1 + C + R12 4 R1 1 R2. 1 R2 1 R2. +. 1 R3. +. 1 L. 3 5. = =. vb (t) vc (t). e (t) R1 1 e (t) L. =. 1 L. e(t) R1. e (t). En este ejemplo, solo se requieren dos ecuaciones nodales para calcular los potenciales vb y vc : Sin embargo, una ecuación adicional debe establecerse si se desea calcular la corriente en la resistencia R3 :. Las reglas para escribir las ecuaciones nodales se re resumen a continuación: 1. El número de ecuaciones requeridas es igual al número de voltajes nodales desconocidos. 10.
(11) i1 a. i2 b. c. d. L1. L2. Rs. i3. C1. C2. RL. e. 2. Se escribe una ecuación nodal por cada nodo. 3. Cada ecuación incluye: (a) El voltaje nodal multiplicado por la suma de todas las admitancias que están conectadas a ese nodo. El término es positivo. (b) El voltaje nodal al otro extremo de cada rama esta multiplicado por la admitancia conectada entre los nodos. Ese término es negativo. Ejemplo 6 Considere el sistema eléctrico mostrado en la …gura (2.1). En esta red se tiene cuatro nodos y se conoce el voltaje de uno de ellos, por lo tanto un análisis nodal requerirá plantear tres ecuaciones nodales. Por otro lado, la red presenta tres mallas y todas sus corrientes son desconocidas. En consecuencia es irrelevante desde el punto de vista de número de ecuaciones a resolver cual método se aplica, sin embargo, debido a que las fuentes de alimentación es en realidad una y de voltaje es preferible hacer un análisis de malla. Aplicando el método se obtienen las siguientes ecuaciones fundamentales 2 3 1 2 3 2 3 Rs + L1 + C11 0 C1 va (t) 7 i1 (t) 6 6 74 1 1 L2 + C11 + C12 6 7 i2 (t) 5 = 4 0 5 C1 C2 4 5 i (t) 0 3 1 1 0 R + L C2 C2 donde la tensión de entrada es va (t) : De…na como variables de estados a las corrientes de los inductores y los voltajes de los condensadores, esto es x1 (t) = i1 (t) x2 (t) = i2 (t) x3 (t) = vc (t) x4 (t) = vd (t) 11. (12).
(12) y note que vc (t). =. vd (t). =. 1 [i1 (t) C1 p 1 [i2 (t) C2 p. i2 (t)] i3 (t)]. Por lo tanto, de la primera ecuación fundamental se obtiene Rs x1 (t) + L1 px1 (t) +. 1 x2 (t) = va (t) C2. o sea, Rs 1 1 d x1 (t) = x1 (t) x2 (t) + va (t) dt L1 L1 C2 L1 De la segunda ecuación fundamental se encuentra L2 pi2 (t). 1 [i1 (t) C1 p. o sea L2. d x2 (t) dt. i2 (t)] +. 1 [i2 (t) C2 p. i3 (t)] = 0. x3 (t) + x4 (t) = 0. En consecuencia. d 1 1 x2 (t) = x3 (t) x4 (t) dt L L De la de…nición de la tercera componente de la ecuación de estado y aplicando las reglas del cálculo operacional se encuentra que d 1 x3 (t) = x1 (t) dt C1. 1 x2 (t) C1. Finalmente, de la tercera ecuación fundamental se tiene 1 [i2 (t) C2 p. i3 (t)] + RL i3 (t) = 0. esto es x4 (t) + Rl i3 (t) = 0 pero de la de…nición de la cuarta componente del vector de estado se deduce C2 px4 (t) = x2 (t). i3 (t). y eliminando la corriente i3 (t) usando la relación i3 (t) = C2 En consecuencia. d x4 (t) = x2 (t) dt. d 1 x4 (t) = x2 (t) dt C2 12. 1 x4 (t) RL 1 x4 (t) C2 RL. 1 RL x4. (t) se llega a.
(13) b. c. d. L1. ea/Rs. L2. Rs. C1. C2. RL. e. De…na como señal de entrada a u (t) = ea (t) ; mientras que la salida del sistema será y (t) = RL i3 (t) ; para arribar a las siguientes ecuaciones de estados para la planta eléctrica dada 3 2 Rs 3 2 1 3 2 32 1 0 0 x1 (t) x1 (t) L1 L1 C2 L1 1 1 7 6 0 7 6 x2 (t) 7 6 0 7 d 6 0 x (t) 2 L L 7 = 6 1 7 6 7 6 76 1 4 5 4 x3 (t) 5 + 4 0 5 u (t) 0 0 dt 4 x3 (t) 5 C1 C1 1 1 x4 (t) x4 (t) 0 0 0 C2 C2 RL 3 2 x1 (t) 6 x2 (t) 7 7 0 0 0 1 6 y (t) = 4 x3 (t) 5 + [0] u (t) x4 (t). Si se quiere realizar un análisis nodal es recomendable transformar la fuente de tensión en una fuente d corriente equivalente como se muestra en la …gura (2.1). Aplicando el método se obtienen las siguientes ecuaciones fundamentales 3 2 1 1 1 2 3 2 ea (t) 3 0 + L1 L1 6 Rs 7 vb (t) Rs 6 74 1 1 1 1 5=4 0 5 v (t) + + C 6 7 c 2 L L L L 1 1 2 2 4 5 v (t) 0 d 1 1 1 0 + + C 2 L2 RL L2. Se deja como útil ejercicio la deducción las ecuaciones de estados para este sistema empleando las de…niciones de las componentes del vector de estado dadas en (12) y las ecuaciones fundamentales encontradas por el análisis nodal.. Ejemplo 7 Considere el circuito eléctrico unipuerto mostrado en la …gura (2.1). Se identi…ca la corriente I con la entrada u (t) ; y el voltaje V en los terminales 13.
(14) de la fuente de corriente como la salida y (t) : Además, siguiendo el paso 1, se tiene VC1 (t) x (t) = VC2 (t) Aplicando análisis nodal (y observando que la resistencia R1 está en serie con la fuente de corriente) se tiene 3 2 1 1 + C 1 R2 5 VC1 (t) = u (t) 4 R2 1 1 VC2 (t) 0 R2 R2 + C2 o sea,. 1 1 d x1 (t) + C1 x1 (t) x2 (t) R2 dt R2 1 d 1 x1 (t) + x2 (t) + C2 x2 (t) R2 R2 dt. = u (t) =. 0. Esto es d x1 (t) dt d x2 (t) dt. = =. 1 1 1 x1 (t) + x2 (t) + u (t) R2 C1 R2 C1 C1 1 1 x1 (t) x2 (t) R2 C2 R2 C2. mientras que la ecuación de salida es y (t). = R1 u (t) + VC1 (t) = x1 (t) + R1 u (t). Por lo tanto las ecuaciones de estados del sistema son d dt. x1 (t) x2 (t) y (t). 1 R2 C1 1 R2 C2. = =. 1. 0. 1 R2 C1 1 R2 C2. x1 (t) x2 (t). x1 (t) x2 (t). +. 1 C1. 0. u (t). + [R1 ] u (t). Ejemplo 8 Considere la red eléctrica multipuerto mostrada en la …gura (2.1), con variable de entrada u (t) = V (t) y señal de salida y (t) = IR2 (t) : El vector de estado x puede tomarse como 2 3 VC1 6 IL1 7 6 7 6 7 x (t) = 6 VC2 7 6 .. 7 4 . 5 V Cn 14.
(15) Aplicando análisis nodal se obtiene las ecuaciones fundamentales del sistema dado 2 1 1 + Ln 111 p + Cn p 0 Ln 1 p 6 R1 6 1 1 1 0 6 Ln 1 p Ln 1 p + Ln 2 p + Cn 1 p 6 6 .. .. .. .. 6 . . . . 4 0. 2. 6 6 = 6 4. V R1. 0 .. . 0. 1 R2. 0. 3. +. 1 L1 p. + C1 p. 7 7 7 5. Solo resta notar que se tiene que VCn (t) VCn 1 (t). VC2 (t). V Cn V Cn. (t) (t) 2. = Ln 1 pILn 1 (t) = Ln 2 pILn 2 (t) .. . VC1 (t) = L1 pIL1 (t) 1. En consecuencia se obtienen las siguientes ecuaciones de estados d x (t) = Ax (t) + Bu (t) dt y (t) = Cx (t). IR1. + I. v(t). IR2. R2. R1. +. + C1. VC1 -. 15. C2. VC2 -. 3. 2 VCn 7 76 7 6 VCn 1 76 .. 74 . 7 5 VC1. 3 7 7 7 5.
(16) donde 2. 6 6 6 6 6 A = 6 6 6 6 6 4 2. B. C. 6 6 6 6 6 = 6 6 6 6 4 =. 1 C1 R2 1 L1. 0 .. . 0 0 0 0 0 0 .. . 0 0 1 Cn R1 1 0 R2. 1 C1. 0 1 C2. .. . 0 0 0. 3 7 7 7 7 7 7 7 7 7 5. 0. 0. 0 0 0 .. . 0. 1 L1. 0 .. . 0 0 0. 0. ... .. 0 0 0 .. . 1 Cn. 1 Ln. 1. 0. 0. 1. 0 1 Cn. 0 0 0 .. . 0 1 Ln 1 1 Cn R1. 3 7 7 7 7 7 7 7 7 7 7 5. 0. Sin embargo, las ecuaciones de estados no son ciones se logra con la transformación 2 p pC1 x1 (t) 6 L1 x2 (t) 6 p 6 Z = 6 C2 x3 (t) 6 .. 4 p . Cn xn (t). únicas; otro conjunto de ecua3 7 7 7 7 7 5. y se obtienen de las ecuaciones fundamentales las nuevas ecuaciones de estados d x (t) = Az (t) + Bu (t) dt y (t) = Cz (t). 16.
(17) IR1. Ln-1. L1. R1. V(t). ILn-1 Cn. C1. IL1. C2. IR1 R2. Cn-1. donde 2. 6 6 6 6 6 6 A = 6 6 6 6 6 6 4 2. B. C. 6 6 6 6 6 = 6 6 6 6 4 =. h. 1 C1 R2 1 p L1 C1. p 1 L1 C1. 0 p 1 L1 C2. 0 .. . 0 0 0. 0. 0 0 0 .. . 0. p 1 L1 C2. .. . 0. 0 .. . 0. 0. 0. 0. ... . p. 0. 0 0 0 .. .. 1 Ln. 1 Cn. 0 0 p 1 Cn R1 p 1 C1 R1. 7 7 7 7 7 7 7 7 7 5. 0. 0. 0. 0. 0. i. B D. 1 Cn. 1. 1. p. 3. 0 0 0 .. .. 1 Ln. 0. 0. La relación existente entre la representaciones P : A C. p. 0 0 0 .. . 0. A C. 1 Ln 1 Cn. B D. p. 1 Ln 1 Cn 1 Cn R1. y P : n;x. se estudiarán más adelante n;z. La deducción de un modelo de estados para una red lineal mediante la asignación de las componentes del vector de estados x; de variables físicas no es sencilla en general, y como se ilustra en los ejemplos que se presentan a continuación. Ejemplo 9 Considere el circuito eléctrico mostrado en la …gura (2.1), Es evidente que el comportamiento dinámico de este sistema está descrita por la 17. 3 7 7 7 7 7 7 7 7 7 7 7 7 5.
(18) R. +. V(t). L. I(t). ecuación. d I (t) dt Si se supone que la entrada al sistema es u (t) = I (t) ; y la señal de salida o respuesta es y (t) = V (t) ; no manera inmediata de establecer las ecuaciones de estados en la forma standard. En este caso, la variable física que correspondería al estado del sistema sería la corriente del inductor, o sea, x (t) = I (t) ; y ahí radica el problema, ya que el estado coincide con la señal de entrada. Cualquier intento de hallar una expresión para x_ (t) necesariamente involucra la derivada de la señal de entrada u (t) ; haciendo de esta manera que sea imposible encontrar la ecuación de estado en la forma deseada. Sin embargo, si u (t) = V (t) e y (t) = I (t) ; entonces de inmediato se obtiene V (t) = RI (t) + L. d x (t) = dt y (t) =. R 1 x (t) + u (t) L L 1:x (t) + 0:u (t). y cuyas ecuaciones de estado están en la forma standard. Con el objeto de ilustrar aún más el problema de escritura de las ecuaciones de estados planteado, considere el sistema eléctrico mostrado en la …gura (2.1). En este caso se tiene dos elementos almacenadores de energía, en consecuencia se postula que el vector de estados tiene dos componentes de…nidas por las variables físicas: el voltaje en el capacitor y la corriente a través de inductor; esto es, VC (t) x (t) = I (t) Sin embargo, es interesante resaltar:. 18.
(19) R. C. +. +. VC. -. V(t). L. I(t). el sistema tiene solo una variable de estado VC (t) ya que d VC (t) dt V (t). =. 1 I (t) C. = VC (t) + RI (t) + L. d I (t) dt. siendo u (t) = I (t) ; y (t) = V (t) : Dichas ecuaciones solo se pueden expresar como d x (t) dt y (t). = Ax (t) + Bu (t) = Cx (t) + Du (t) + E. d u (t) dt. la cual nuevamente no está en forma standard. A pesar de que el estado es unidimensional, se requiere conocer VC (0) y I (0 ) para calcular la salida V (t) ; o sea, I (t) es como si fuera también una variable de estados. Además de la di…cultad que ilustra el ejemplo anterior, se concluye que existen sistemas dinámicos donde la dimensión del vector d estado es menor que el número de elementos almacenadores de energía (se puede demostrar que la diferencia es el rango de la matriz E): Ejemplo 10 Considere la red mostrada en la …gura (2.1). Para este sistema eléctrico se tienen las siguientes relaciones d VC (t) = IL2 (t) dt d d L1 IL1 (t) = L2 IL2 (t) + VC (t) dt dt I (t) = IL1 (t) + IL2 (t) d V (t) = L1 IL1 (t) dt C. 19.
(20) + I(t). L2 IL1. V(t). IL2. L1. + C. VC. No existen ecuaciones adicionales a estas que sean independientes, en consecuencia, cualquier ecuación de estado deberá construirse empleando esas relaciones. Después de varios intentos, se puede demostrar que con entrada u (t) = I (t), salida y (t) = VC (t) y 2 3 IL1 (t) x (t) = 4 IL2 (t) 5 VC (t) resulta imposible encontrar matrices A y B tal que. d x (t) = Ax (t) + Bu (t) dt y lo mejor que puede hacerse es 3 2 32 3 2 2 1 0 0 IL1 (t) IL1 (t) (L +L ) 2 1 d 4 1 5 4 IL2 (t) 5 + 6 IL2 (t) 5 = 4 0 0 4 (L2 +L1 ) dt VC (t) VC (t) 0 C 1 0. L2 (L2 +L1 ) L1 (L2 +L1 ). 0. 3. 7 d 5 u (t) dt. La di…cultad que se encuentra en ejemplos como el anterior consiste en la insistencia de …jar las entradas del estado como variables físicas asignadas a los elementos almacenadores de energía, o sea, corrientes en los inductores y voltajes en los condensadores. De ‡exibilizar esta exigencia, será posible encontrar modelos en variables de estados en la forma standard para redes eléctricas lineales. Particular atención hay que prestarle a sistemas eléctricos donde se encuentra a un transformador o un girador como uno de sus componentes. Recuerde que un transformador T r ideal es una red de dos puertos cuyo símbolo se muestra en la …gura (2) y en el cual se cumple las relaciones V1 (t). = mV2 (t) 1 I2 (t) I1 (t) = m 20.
(21) n1. a. n2. c. +. +. I1(t). V1(t). I2(t). V2(t). -. -. d. b Figure 2: Transformador Eléctrico Ideal. donde m=. n1 n2. representa la relación de vueltas del transformador, n1 es el número de vueltas del enrollado en el terminal primario a b, mientras n2 es el número de vueltas del enrollado en el terminal secundario del transformador. Es importante observar que la potencia suministrada al primario está dada por pot1 = V1 (t) I1 (t) mientras que la potencia de salida está dada por pot2 = V2 (t) I2 (t) en consecuencia pot1. = V1 (t) I1 (t) = (mV2 (t)). 1 I2 (t) m. = V2 (t) I2 (t) = pot2 En conclusión, en un transformador ideal no hay almacenamiento o disipación de potencia. También es interesante recordar como se re‡eja la impedancia de un terminal a otro, suponga que se tiene el circuito eléctrico mostrado en la …gura (2.1). 21.
(22) + V1(t) I1(t). L1. I(t). + V2(t). m. R1. I2(t). C2. C1. R2. L2. Aplicando análisis nodal a la red dada se obtiene 1 1 V1 (t) + I1 (t) + R1 L1 1 1 IL (t) + C2 + + V2 (t) R2 L2 C1 +. = I (t) = I2 (t). y según las relaciones constitutivas del transformador V1 (t) = mV2 (t) y I1 (t) = 1 m I2 (t) ; se tiene C1 +. 1 1 + R1 L1. V1 (t) +. 1 1 1 + IL (t) + C2 + m R2 L2. V2 (t) = I (t). esto es C1 + C1 +. 1 1 + R1 L1. 1 C2 m2. +. 1 1 1 1 IL (t) + C2 + V1 (t) = I (t) + m R2 L2 m 1 1 1 1 1 1 1 1 + 2 + 2 V1 (t) + IL (t) = I (t) + R1 m R2 L1 m L2 m 1 1 1 1 Ceq + + V1 (t) + IL (t) = I (t) Req Leq m V1 (t) +. donde Ceq 1 Req 1 Leq. 1 C2 m2 1 1 + 2 m R2 1 1 + 2 m L2. = C1 + = =. 1 R1 1 L1. Por lo tanto, al re‡ejar todos los elementos en el secundario del transformador al sector primario de este se obtiene el sistema equivalente mostrado en la …gura (2.1). 22. IL(t).
(23) + V1(t). I(t) Leq. Req. Ceq. I1(t). IL(t)/m. I2(t) rG. + V1(t). + V2(t). -. -. De igual manera la re‡exión también puede hacia el secundario empleando la relación V1 (t) = mV2 (t) en el caso donde el voltaje V2 (t) sea la variable de interés como respuesta del sistema. También es de interés el elemento giratorio cuya representación simbólica se muestra en la …gura (2.1) cuyas relaciones constitutivas son V1 (t) I1 (t). = rG I2 (t) 1 = V2 (t) rG. donde rG es la relación del elemento giratorio. También es importante observar. 23.
(24) r1. m=r1/r2. r2 Equivale. r Equivale Cr2. C. que este es un elemento que no almacena o disipa potencia ya que pot1. = V1 (t) I1 (t) = (rG I2 (t)). 1 V2 (t) rG. = V2 (t) I2 (t) = pot2 Algunas propiedades interesantes de los giratorios se muestran en la …gura (2.1) En el proceso de obtención de un modelo en variables de estados para un sistema que tenga como elementos a un transformador y/o un elemento giratorio, es posible que las señales de entradas no necesariamente están bien de…nidas como se ilustrará a continuación, y en consecuencia, puede ser muy difícil o imposible deducir modelo en variable de estados alguno. Ejemplo 11 Considere la red mostrada en la …gura (2.1). Debido a la presencia del transformador, las señales de entradas V1 (t) y V2 (t) no pueden seleccionarse independientemente. Por lo tanto, es imposible escribir las ecuaciones de estados de dicho sistema cuando u (t) =. V1 (t) V2 (t). No hay manera posible de evitar esta di…cultad. En términos generales, el uso del transformador también implica dependencia lineal entre muchas variables de estados. En consecuencia, el vector de estado tendrá una dimensión inferior al número de elementos almacenadores de energía.. 24.
(25) +. + V1. 2.2. V2. Modelaje en Variables de Estados de Sistemas Mecánicos Traslacionales. Los sistemas mecánicos que involucran masas, resortes y elementos de fricción son muy similares a los sistemas eléctricos. Sin embargo, para describir el movimiento de cada parte de un sistema mecánico se requiere tanto como seis componentes de velocidad; tres de traslación y tres de rotación. Es posible centrarse en sistemas mecánicos traslacionales o sea aquellos que presentan desplazamientos solo en líneas rectas en un espacio tridimensional con eje de coordenadas : Por convención, los movimientos positivos se tomarán a aquellos que salen del origen de coordenadas en las direcciones positivas de los ejes 1x ; 1y y 1z : Para simpli…car aún más el análisis, suponga que los sistemas mecánicos traslacionales a estudiar son tales que los movimientos ocurren solo en una de las dimensiones del eje de coordenadas; por lo tanto, la interconexión de los elementos básicos (átomos) como la masa, el resorte y amortiguador, y las limitaciones sobre el movimiento puede describirse adecuadamente en una dimensión. Esto hace relativamente el proceso de modelado matemático mediante variables de estados de este tipo de sistemas, ya que el análisis vectoriales no es necesario. Los sistemas mecánicos cumplen con la ley segunda de Newton: "La suma de todas las fuerzas aplicadas a un cuerpo dado es igual a la suma de todas las fuerzas reactivas". En referencia a la …gura (2.2) la ley de Newton puede establecerse como F1 + F2 + F3 = Fa + Fb + Fc + Fd El análisis que se realizará en esta sección solo incluirá funcione lineales. Efectos tales como la fricción estática, la fricción de Coulomb y otros efectos de fricción no lineales no serán considerados.. 25.
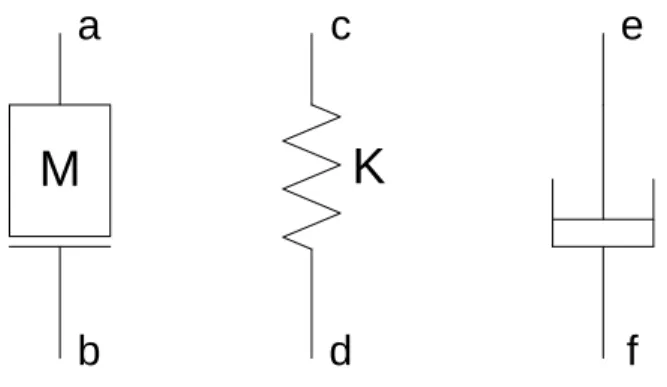
(26) F1 Fa. Fd. Fc. F2 Fb 2.2.1. F3. La masa de traslación. Toda materia tiene cierta masa, incluso los componentes de la mayoría de los sistemas de ingeniería. Se acostumbra a representar un elemento mecánico como una masa si el comportamiento del componente provocado por la inercia es signi…cativo con respecto a las demás características. ES posible describir la inercia como la resistencia de un cuerpo a modi…car su estado actual de movimiento. Un objeto en reposo comienza a moverse solo cuando se le aplica una fuerza. Del mismo modo, una masa que se mueve a una velocidad constante y en línea recta cambiará de dicha dirección y/o velocidad solo si se le aplica una nueva fuerza. La masa M es el elemento inercial. Una fuerza aplicada (causa) a una masa genera una aceleración (efecto) de la masa. La fuerza de reacción FM es igual al producto de la masa M y la aceleración, y es opuesta a la dirección de la fuerza d aplicada. En términos del desplazamiento z (t) ; la velocidad v (t) = dt z (t) y la 2 d aceleración a (t) = dt2 x (t) ; la ecuación de fuerzas según la ley de Newton para este elemento será X FM (t) = M a (t) = M v (t) = M 2 z (t) = Fe P y donde Fe es la suma de todas las fuerzas externas aplicadas a la masa M: La representación de la masa como un elemento de red se muestra en la …gura (3)-(i). Un terminal, a; representa el movimiento de la masa; mientras que el. 26.
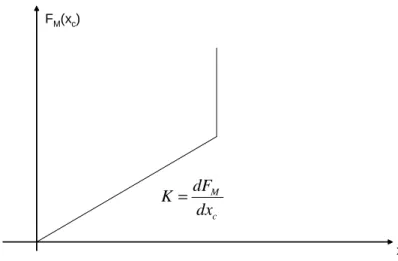
(27) a. c. e. K. M. b. B. d. (i). f. (ii). (iii). Figure 3: Elementos de una Red Mecánica Traslacional. otro terminal, b; se considera tener el movimiento de la referencia (¿Tierra?). La fuerza de reacción FM es una función temporal y se considera que ‡uye ”a través” de la masa M: 2.2.2. El resorte de traslación. La elastancia o rigidez, K de un elemento mecánico suministrará una fuerza restauradora similar a la de un resorte traslacional. En consecuencia, si se comprime, el resorte tratará de estirarse; mientras que si se estira, este tratará expandirse para regresar a su posición de equilibrio. La fuerza de reacción FK (t) sobre cada terminal de un resorte traslacional es la misma e igual al producto de la constante de elastancia K y la cantidad de deformación espacial del resorte. La representación de un resorte como elemento de red se muestra en la …gura (3)-(ii). El desplazamiento de cada terminal o extremo del resorte se mide a partir de la correspondiente posición original o de equilibrio. El terminal c tiene una posición xc ; y el terminal d tiene una posición xd ; medidas ambas desde sus respectivas posiciones de equilibrio. En consecuencia, la ecuación de fuerza cumple con la ley de Hooke la cual establece FK (t) = K (xc (t). xd (t)) = Kp. 1. [vc (t). vd (t)]. Si el terminal d está …jo, entonces xd (t) = 0; y la ecuación anterior se reduce a FK (t) = Kxc (t) = Kp. 1. vc (t). El grá…co de FK vs xc para un resorte real no es generalmente una línea recta (ver …gura(4)), debido a la característica no lineal del resorte. Sin embargo, sobre una región limitada de operación, la aproximación lineal, da una aproximación satisfactoria. 27.
(28) FM(xc). K=. dFM dxc xc. Figure 4: Características de un Resorte Real. 2.2.3. El amortiguador traslacional. En los sistemas mecánicos, el amortiguamiento se re…ere generalmente a cualquier resistencia al movimiento que provoca la atenuación de éste último. A diferencia de las masas y resortes que almacenan la energía, los elementos que provocan el amortiguamiento disipan la energía (y son elementos estáticos). La amortiguación o fricción viscosa B caracteriza entonces a aquellos elementos mecánicos que absorben energía. La fuerza amortiguadora es proporcional a la diferencia en velocidad de los dos cuerpos. La suposición que la fricción viscosa es lineal con respecto a la variación en velocidad simpli…ca el análisis del comportamiento dinámico del sistema mecánico bajo estudio. La representación del efecto de disipación o amortiguamiento como elemento de red se presenta en la …gura (3)-(iii) como un amortiguador. La amortiguación presente en un sistema puede ser natural como consecuencia de la construcción física o intencional (ya que tiende a estabilizar los sistemas). La fuerza reactiva de amortiguamiento FB (t) se aproxima mediante el producto de la constante de amortiguamiento B y la velocidad relativa de los dos terminales del amortiguador. Esto es FB (t) = B [ve (t). vf (t)] = B [pxe (t). pxf (t)]. El procedimiento para establecer las ecuaciones de estados de un sistema mecánico traslacional P mediante la asignación de variables físicas correspondientes a variables asociadas a los elementos acumuladores de energía, se muestra a continuación: 1. Identi…que cada posición de cada resorte traslacional y la velocidad de cada masa con una componente del vector de estado x. Naturalmente, posiciones de diferentes resortes y diferentes masas le corresponderán difer28.
(29) entes entradas (a pesar de que los valores nominales de los resortes o masas sean idénticos). 2. Use la ley de fuerzas de Newton y las leyes constitutivas de cada elemento del sistema, para escribir una ecuación que solo involucre una de las componentes de dx dt ; pero que no involucre cualquier componente del vector de salida y o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 3. Use la ley de fuerzas de Newton y las leyes constitutivas de cada elemento del sistema, para escribir una ecuación que solo involucre una de las componentes de y; pero que no involucre cualquier componente del vector dx dt o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 4. Organice las ecuaciones derivadas en el paso (2) como d x(t) = Ax(t) + Bu(t) dt y a aquellas derivadas en el paso (3) como y(t) = Cx(t) + Du(t) Ejemplo 12 Supóngase que se tiene un sistema como el que se muestra en la …gura (5). Se desea conocer el desplazamiento de la masa cuando se aplica una fuerza u (t) = f (t) a partir de t = t0 : Los desplazamientos za y zb representan las desviaciones posicionales con respecto a las posiciones de equilibrio del sistema. Finalmente, la salida del sistema será la posición de la masa zb (t) De acuerdo a las leyes de Newton y las leyes que gobiernan cada uno de los elementos del sistema, las ecuaciones fundamentales del sistema son f (t) = fK (t) = K (za (t) zb (t)) fK (t) = fM (t) + fB (t) = M p2 zb (t) + Bpzb (t) De…na como vector de estado a zb (t) vb (t). x (t) = De inmediato se tiene que d x1 (t) dt M. = vb (t) = x2 (t). d x2 (t) + Bx2 (t) = u (t) dt y (t) = x1 (t). 29.
(30) Za(t). Zb(t). M f(t). K. B. Referencia. Figure 5: Sistema Mecánico Traslacional Simple. Por lo tanto d dt x1 d dt x2. (t) (t) y (t). =. 0 0. =. 0. 1 B M. x1 (t) x2 (t) x1 (t) x2 (t). 1. +. 0 1 M. u (t). + [0] u (t). a. 2.3. Modelaje en Variables de Estados de Sistemas Mecánicos Rotacionales. Aquellos sistemas que involucran movimientos rotacionales alrededor de una dirección …ja de coordenadas puede representarse mediante un sistema mecánico rotacional. Los sistemas mecánicos rotacionales que involucran inercias, resortes rotacionales y elementos de fricción son muy similares a los sistemas mecánicos traslacionales. En consecuencia para describir el movimiento de cada una de sus partes, se requiere tanto como seis componentes de velocidad; tres de traslación y tres de rotación. Sin embargo, es posible centrarse en sistemas mecánicos rotacionales cuyos desplazamientos rotacionales puedan descomponerse en componentes de la velocidad de rotación alrededor de tres ejes de rotación. Por convención, las rotaciones positivas son aquellas medidas en dirección antihoraria cuando se ve hacia el origen. La velocidad de rotación puede representarse 30.
(31) τa. τb. τ2 τ1. mediante un vector de rotación de longitud proporcional a la velocidad angular y con dirección a lo largo de un eje de rotación tal que si la mano derecha toma la masa rotante con los dedos apuntando en dirección de rotación, el pulgar apunta la dirección del eje de rotación. En los sistemas rotacionales las variables de ‡ujo y de esfuerzo son el torque o par y la velocidad angular respectivamente. Los sistemas mecánicos rotacionales cumplen con la ley segunda de Newton: "La suma de todas los torques o pares aplicadas a un cuerpo dado es igual a la suma de todos los torques reactivos". En referencia a la …gura (2.2) la ley de Newton puede establecerse como 1. (t) +. 2. (t) =. a. (t) +. b. (t). El análisis que se realizará en esta sección solo incluirá funciones lineales. Efectos tales como la fricción estática, la fricción de Coulomb y otros efectos de fricción no lineales no serán considerados. 2.3.1. La inercia de rotación. El torque o par resultante con respecto a un punto …jo (referencia inercial) debido a todas la fuerzas con resultante F~ sobre un cuerpo es ~ = ~r. F~. donde ~r es el vector de posición desde el punto …jo al punto de aplicación de la fuerza resultante F~ . Pero ya que d (m~v ) F~ = dt 31.
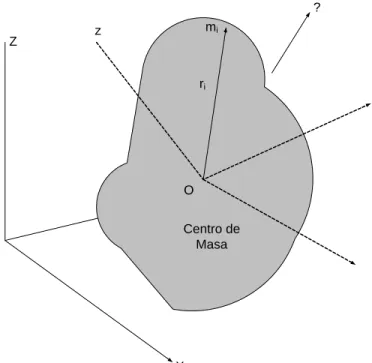
(32) ? Z. mi. z. ri y. O y Centro de Masa x. X. Figure 6: De…nicón de Momento Angular. se obtiene ~ = ~r. d d (m~v ) = (~r dt dt. m~v ). ya que d ~r dt. m~v = 0. Si se de…ne el momento angular como ~ = ~r H. m~v. entonces la segunda ley de Newton correspondiente al movimiento angular es ~=. d ~ H dt. (13). Para un cuerpo rígido que gira en torno a un punto …jo en el mismo cuerpo, o bien en torno a su centro de masa, con una velocidad angular !; la velocidad instantánea de una partícula de masa mi con respecto al punto …jo o centro de masa (ver …gura(6)) es ~vi = ! ~ ~ri. 32.
(33) donde el vector de posición ~ri se mide con respecto al punto …jo o centro de masa del cuerpo. En vista de las ecuaciones deducidas e integrando sobre todas las partículas que constituyen el cuerpo se tiene el momento angular par aun cuerpo rígido Z ~ H = [~r (~ ! r)] dm La expansión de la relación anterior en sus componentes en el marco referencial x y z que se anexa al cuerpo en el centro de masa o en el punto …jo se obtiene Z Z Z 2 2 ~ ~ H = 1x ! x y + z dm ! y (xy) dm ! z (xz) dm Z Z Z 2 2 ~ +1y ! x (yx) dm + ! y z + x dm ! z (yz) dm Z Z Z ~ +1z ! x (zx) dm ! y (zy) dm + ! z x2 + y 2 dm o de…niendo los momentos de inercia Jxx ; Jyy ; Jzz y los productos de inercia Jxy ; Jxz ; Jyz se obtiene ~ H. = ~1x (Jxx ! x Jxy ! y Jxz ! z ) +~1y [ ! x Jxy + ! y Jyy ! z Jyz ] +~1z [ ! x Jzx ! y Jzy + ! z Jzz ] = ~1x Hx + ~1y Hy + ~1z Hz. En el caso general en donde el eje de coordenadas x y z gira con una velocidad que puede ser distinta de la velocidad de rotación del cuerpo !; la razón de cambio del momento angular está dada por d ~ H= dt. d ~ H dt. +. ~ H. x y z. y en consecuencia la ecuación para el cuerpo rígido (13) se convierte en ~=. d ~ H dt. +. ~ H. x y z. Dicha relación puede expresarse en términos de las distintas componentes del torque ~ ; para llegar a Hy. z. + Hz. y. y. = H_ x = H_ y. Hz. x. + Hx. z. z. = H_ z. Hx. y. + Hy. z. x. 33. (14).
(34) y note que estas son la suma de todos pares de torsión que se aplican en una dirección dada. Para cualquier punto …jo de rotación existe un conjunto de direcciones de eje unidas al cuerpo en ese punto; éstos son los denominados ejes principales, para los cuales los productos de inercia son cero. Si los ejes x y z coinciden con los ejes principales, entonces la ecuación (14) se transforma en x y z. = Jxx !_ x Jyy z ! y + Jzz y ! z = Jyy !_ yy Jzz x ! z + Jxx z ! x = Jzz !_ z Jxx y ! x + Jyy x ! y. Además, si el movimiento ocurre sólo sobre un conjunto d ejes, por ejemplo, el eje z y; y se elije = !; entonces ! x = x = 0; y ! y = y = 0; y la ecuación anterior se reduce a _z z = Jzz ! o J. = Jp! = Jp2. d : donde ! = dt En otras palabras, el torque de reacción J se opone en dirección a la del torque aplicado y es igual al producto del momento de inercia J y la aceleración d angular dt !: La representación de la inercia como un elemento de red se muestra en la …gura (2.3.1)-(i). Un terminal, a; representa el movimiento de la inercia; mientras que el otro terminal, b; se considera tener el movimiento de la referencia (centro de gravedad). El torque de reacción J es una función temporal y se considera que ‡uye "a través" de la inercia J:. a. c. K. J. b (i). e. d (ii). B. f (iii). 34.
(35) 2.3.2. El resorte de rotación o torsión. La elastancia o rigidez, K de un elemento mecánico rotacional suministrará un torque restaurador similar a la de un resorte traslacional o resorte de torsión. En consecuencia, si se comprime, el resorte tratará de estirarse; mientras que si se estira, este tratará expandirse para regresar a su posición de equilibrio. El torque de reacción K (t) sobre cada terminal de un resorte rotacional es la misma e igual al producto de la constante de elastancia K y la cantidad de deformación espacial del resorte. La representación de un resorte rotacional como elemento de red se muestra en la …gura (2.3.1)-(ii). El desplazamiento de cada terminal o extremo del resorte se mide a partir de la correspondiente posición original o de equilibrio. El terminal c tiene una posición angular c ; y el terminal d tiene una posición angular d ; medidas ambas desde sus respectivas posiciones de equilibrio. En consecuencia, la ecuación de torque cumple con K. (t) = K (. c. (t). Si el terminal d está …jo, entonces K. (t) = K. 1. d. (t)) = Kp. d. (t) = 0; y la ecuación anterior se reduce a. c. (t) = Kp. 1. [! c (t). ! d (t)]. ! c (t). y en consecuencia d dt 2.3.3. K. (t) = K! c (t). El amortiguador rotacional. En los sistemas mecánicos rotacionales, el amortiguamiento se re…ere generalmente a cualquier resistencia al movimiento rotacional que provoca la atenuación de éste último. A diferencia de las masas y resortes que almacenan la energía, los elementos que provocan el amortiguamiento disipan la energía (y son elementos estáticos). La amortiguación o fricción viscosa B caracteriza entonces a aquellos elementos mecánicos que absorben energía. El torque amortiguador es proporcional a la diferencia en velocidad angular de los dos cuerpos. Al igual que para el amortiguador traslacional, se supone que la fricción viscosa es lineal con respecto a la variación en velocidad. Esto simpli…cará el análisis del comportamiento dinámico del sistema mecánico rotacional bajo estudio. La representación del efecto de disipación o amortiguamiento como elemento de red se presenta en la …gura (2.3.1)-(iii) como un amortiguador. El torque reactivo de amortiguamiento B (t) se aproxima mediante el producto de la constante de amortiguamiento B y la velocidad angular relativa de los dos terminales del amortiguador. Esto es B. (t) = B [! e (t). ! f (t)] = B [. e. (t). f. (t)]. El procedimiento para establecer las ecuaciones de estados de un sistema mecánico rotacional P mediante la asignación de variables físicas correspondientes a variables asociadas a los elementos acumuladores de energía, se muestra a continuación: 35.
(36) 1. Identi…que cada posición angular de cada resorte rotacional y la velocidad angular de cada inercia con una componente del vector de estado x. Naturalmente, posiciones de diferentes resortes y diferentes inercias le corresponderán diferentes entradas (a pesar de que los valores nominales de los resortes o masas sean idénticos). 2. Use la ley de fuerzas de Newton y las leyes constitutivas de cada elemento del sistema, para escribir una ecuación que solo involucre una de las componentes de dx dt ; pero que no involucre cualquier componente del vector de salida y o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 3. Use la ley de fuerzas de Newton y las leyes constitutivas de cada elemento del sistema, para escribir una ecuación que solo involucre una de las componentes de y; pero que no involucre cualquier componente del vector dx dt o cualquier otra variable distinta a las componentes del estado x o del vector de entrada u: 4. Organice las ecuaciones derivadas en el paso (2) como d x(t) = Ax(t) + Bu(t) dt y a aquellas derivadas en el paso (3) como y(t) = Cx(t) + Du(t) Ejemplo 13 Considere el sistema mostrado en la …gura (2.3.3). La inercia Jm representa la parte rotatoria de un motor eléctrico o hidráulico que aplica un torque T (t) ; mientras que JL es la inercia de la carga. En servos de bajo nivel de potencia, los ejes pueden considerarse in‡exibles; sin embargo, en servos de alto nivel de potencia requieren en general el modelaje de la elasticidad del eje mediante la elastancia K: La amortiguación BM L representa las pérdidas por fricción en el eje. Los amortiguadores Bm y BL pueden considerarse en modelos más completos, pero en este ejemplo se despreciarán. La salida de interés del sistema es y (t) = ! L (t) : La aplicación de las leyes de Newton en cada inercia genera las siguientes ecuaciones fundamentales Jm p! m (t) + BM L (! m (t) JL p! L (t) BM L (! m (t). ! i (t)) + Kp ! i (t)) Kp. 1 1. [! m (t) [! m (t). De…na como variables de estados 2. x (t) = 4. m. 3 (t) L (t) 5 ! m (t) ! L (t). 36. ! L (t)] = T (t) ! L (t)] = 0.
(37) BML. BL. JL. ω L (t ). K Jm T(t). ω m (t ). Bm. mediante la asignación de variables físicas asociadas a los elementos almacenadores de energía, De inmediato se tienen las siguientes ecuaciones de estados x_ 1 (t). = x2 (t) x3 (t) K BM L BM L 1 x1 (t) x2 (t) + x3 (t) + u (t) x_ 2 (t) = Jm Jm Jm Jm K BM L BM L x_ 3 (t) = x1 (t) + x2 (t) x3 (t) JL JL JL y (t) = x3 (t) y en consecuencia d x (t) dt y (t). 2. = 4. =. 0. 1. K Jm K JL. BM L Jm BM L JL. 0. 0. 1. 1 BM L Jm BM L JL. 3. 2. 5 x (t) + 4. x (t) + [0] u (t). 0 1 Jm. 0. 3. 5 u (t). Ejemplo 14 Considere el sistema mecánico rotacional mostrado en la …gura (2.3.3). Se desea conocer la velocidad angular ! 2 de la inercia J2 cuando se aplica un par torsional T a la inercia J1 : Supóngase que los ejes que conectan dichos elementos son ‡exibles con coe…cientes de elastancia K1 y K2 ; y que hay efectos de pérdida de energía por fricción y que se modela mediante una amortiguador con coe…ciente de amortiguamiento B:. 37.
(38) Es posible entonces demostrar que las ecuaciones fundamentales de dicho sistema son 1. T (t) = J1 ! 1 (t) + K1 0 = J2 ! 2 (t) + K2. ! 1 (t) + B! 1 (t) + K2 1 [! 2 (t) ! 1 (t)]. 1. [! 1 (t). ! 2 (t)]. y expresándolo en forma matricial se tiene 1. J1 + (K1 + K2 ) K2 1. +B J2. K2 1 + K2. ! 1 (t) ! 2 (t). 1. T (t) 0. =. o lo que es lo mismo J1. 2. + B + (K1 + K2 ) K2. J2. 2. K2 + K2. 1 2. (t) (t). =. T (t) 0. Siguiendo el método de variables físicas para asignar el vector de estados, de…na como variables de estados a 3 2 1 (t) 7 6 1 (t) 7 x=6 4 1 (t) 2 (t) 5 2 (t) En consecuencia,. x_ 1 (t) x_ 3 (t). = =. (t) = x2 (t) 1 (t) 2 (t) = x2 (t). 1. x4 (t). Use ahora las ecuaciones fundamentales para encontrar las expresiones para x_ 2 (t) y x_ 3 (t) : De la primera ecuación fundamental se obtiene J1 x_ 2 (t) + Bx2 (t) + (K1 + K2 ) x1 (t) donde se ha usado el hecho que x_ 2 (t) =. 2. (t) = x1 (t). K1 x1 (t) J1. K2 (x1 (t). x3 (t)) = T (t). x3 (t) : Por lo tanto. B K2 1 x2 (t) + x3 (t) + u (t) J1 J1 J1. Use ahora la segunda ecuación fundamental para encontrar J2 x_ 4 (t). K2 x3 (t) = 0. o sea. K2 x3 (t) J2 En forma matricial se expresa entonces las ecuaciones de estados como 2 3 2 3 0 1 0 0 0 K K B 1 1 1 2 6 7 7 6 d J1 J1 J1 J1 7 x (t) + 6 J1 7 u (t) x (t) = 6 4 5 4 0 1 0 1 0 5 dt K2 0 0 0 0 J2 x_ 4 (t) =. y (t). =. 0. 0. 0. 1. x (t) + [0] u (t). 38.
(39) Ejemplo 15 Repita el ejemplo anterior pero ahora tome como vector de estados a 2 3 T1 (t) 6 7 1 (t) 7 z (t) = 6 4 T2 (t) 5 2 (t) donde T1 (t) y T2 (t) son los pares torsionales en los extremos de los resortes rotacionales. De la relación constitutiva del resorte se tiene que 1. T1 (t) = K1 T2 (t) = K2. 1. !1 [! 2 (t). ! 1 (t)]. y de inmediato z_1 (t) z_3 (t). = K1 z2 (t) = K2 z4 (t). K2 z2 (t). y use ahora las ecuaciones fundamentales 1. J1 + (K1 + K2 ) K2 1. +B J2. K2 1 + K2. 1. ! 1 (t) ! 2 (t). =. T (t) 0. para obtener J1 z_2 (t) + z1 (t). z3 (t) + Bz2 (t) z2 (t) + J2 z_4 (t). Por lo tanto las ecuaciones de estados serán 2 0 K1 0 0 B 1 1 6 0 J1 J1 J1 z_ (t) = 6 4 0 K2 0 K2 1 0 0 0 J2 y (t). =. 0. 0. 0. 1. 3. = u (t) = 0 2. 0. 3. 6 1 7 7 7 z (t) + 6 J1 7 u (t) 4 0 5 5 0. z (t) + [0] u (t). Lo interesante de los ejemplos (14) y (15), es la ilustración del hecho que no existe tal cosa como la representación en espacio de estados de un sistema P dado. Las representaciones en variables de estados no son únicas inclusive cuando se emplea el método de asignación por variables físicas o almacenadoras de energía.. 3. Analogías. Existen diversas maneras de sistematizar el proceso de encontrar las ecuaciones de estados de una planta dada una vez que se ha de…nido el vector de estados. 39.
(40) T (t ), ω1 (t ). ω2 (t ). K1. K2. J1. B. J2. Sin embargo, en estas notas se utilizará el método de analogía eléctrica ya que es más natural para la audiencia a cual está dirigida estas notas y permite consolidar tantos los conceptos como los principales resultados de la teoría de redes eléctricas. El método se basa en el concepto de circuitos eléctricos análogos y que se emplean para representar sistemas (de diferente naturaleza física) para los cuales las ecuaciones diferenciales que de…nen el conjunto de ecuaciones fundamentales del sistema tienen la misma forma. Para entender y justi…car el método a presentar es necesario recordar varios conceptos básicos. En todo sistema físico existen dos tipos de variables: a) las variables de ‡ujo, y b) las variables de esfuerzo. Se de…nen como variables de ‡ujo o variables ”a lo largo” como aquellas variables que tienen el mismo valor a todo lo largo del elemento, o sea, la variable ‡uye a través del elemento sin sufrir variaciones, y para su medición es necesario insertar un instrumento de medición en serie con el elemento. Una variable de ‡ujo f de un sistema eléctrico es naturalmente la corriente, y esta se mide colocando un voltímetro en paralelo con el elemento en el cual ocurre la caida o diferencia de potencial. Se de…nen como variables de esfuerzo o variables ”a través”como aquellas variables que dependen de una diferencia a través de un elemento, y para su medición es necesario colocar un instrumento de medición en paralelo con el elemento. Una variable de esfuerzo e de un sistema eléctrico es naturalmente el voltaje, y esta se mide insertando un amperímetro en serie con el elemento por el cual ‡uye la corriente a medir. No es difícil demostrar que la energía o trabajo suministrado (o utilizado) por un elemento por el cual ‡uye una variable f y en sus terminales está presente una variable de esfuerzo e; de acuerdo a la polaridad establecida en la …gura. 40.
(41) e(t) -. + f(t) (a). (b) Elemento Generalizado. (tierra o punto de referencia). (3)), sobre el intervalo [0; T ] está dada por Energ{a =. Z. T. e (t) f (t) dt. 0. Con la convención dada, la energía es una cantidad escalar y, bajo la polaridad mostrada, se considera que si la energía es positiva si el elemento absorbe o disipa energía (como en una resistencia), y negativa si es emitida (como en una fuente). En consecuencia la potencia asociada a un elemento generalizado como el mostrado en la …gura (3) está dada por pot = e (t) f (t) y las unidades siempre serán en watts, independientemente de la naturaleza física de las variables de esfuerzo y ‡ujo. En base a estos conceptos básicos y convenciones se tiene los siguientes elementos "generalizados": 1. Resistencia o elemento disipativo: El comportamiento de un elemento R es de una resistencia si esa determinado por la relación constitutiva e (t) = Rf (t) o. (15). e (t) R Tal elemento es no lineal si el parámetro depende de f o e; y evidentemente es un elemento estático. f (t) =. 41.
(42) La correspondiente expresión para la potencia disipada por tal elemento es pot(t). = e (t) f (t) f 2 (t) e2 (t) = = R R. y note que la potencia siempre será positiva. 2. Capacitancia: El comportamiento de un elemento C es de una capacitancia si está determinado por la relación constitutiva Z t 1 e (t) = i ( ) d + e (t0 ) (16) t0 C con t0 2 R; y donde e (t0 ) es el esfuerzo acumulado en el elemento en el instante t0 : La anterior relación puede expresarse como f (t) =. d (Ce (t)) = dt. (Ce (t)). La relación (16) se aplica tanto a elementos lineales como no lineales, y demuestra que la capacitancia es un elemento dinámico. Si C es constante, la relación constitutiva del elemento se reduce a f (t) = C. d e (t) dt. y si la capacitancia es variante en el tiempo, entonces f (t) = C (t). d d e (t) + e (t) C (t) dt dt. Finalmente si la capacitancia es no lineal (depende de f o e), suponga que C = C (e) ; entonces dC de d C= dt de dt y en consecuencia la relación constitutiva del capacitor será f (t). d d e (t) + e (t) C (t) dt dt d dC de = C e (t) + e dt de dt dC de = C +e de dt = C (t). 42.
(43) Suponga que la capacitancia C es invariante en el tiempo y lineal, entonces la potencia instantánea suministrada al (almacenada por) condensador es pot(t) = e (t) f (t) = Ce (t). d e (t) dt. y en consecuencia, la energía suministrada al capacitor entre t = t0 y t = T es Z T Z T d Ce (t) e (t) dt pot(t)dt = energ{a = dt t0 t0 1 2 2 = C e (T ) e (t0 ) 2 Suponga que t0 = 0; y e (0) = 0; entonces energ{a =. 1 2 Ce (T ) 2. Dicha expresión puede interpretarse como que la energía es almacenada en el capacitor generalizado a través de la variable de esfuerzo e; en consecuencia, e cali…ca como la variable de estado relacionada con el elemento almacenador de energía C: 3. Inductancia o Inertancia: El comportamiento de un elemento L es de una inductancia si está determinado por Z t 1 f (t) = e ( ) d + f (t0 ) (17) t0 L con t0 2 R; y donde f (t0 ) es el ‡ujo acumulado en el elemento en el instante t0 : Al igual que en el elemento capacitancia, la relación (17) se aplica tanto a elementos lineales como no lineales. Para este elemento puede hacerse un análisis similar al de la capacitancia para los casos cuando es te elemento es variante en tiempo o no lineal. La energía almacenada por una inductancia L constante en el tiempo sobre un intervalo [t0 ; T ] está dada por energ{a =. 1 L f 2 (T ) 2. f 2 (t0 ). Suponga que t0 = 0; y f (0) = 0; entonces energ{a =. 1 2 Lf (T ) 2. Dicha expresión puede interpretarse como que la energía es almacenada en el inductor generalizado vía la variable de ‡ujo f; en consecuencia, f cali…ca como la variable de estado relacionada con el elemento almacenador de energía L: 43.
(44) a. a. + e(t). f(t) b. b (ii). (i). 4. Fuentes de esfuerzo y ‡ujo:: El comportamiento de las fuentes de esfuerzo y ‡ujo, respectivamente, es e = e (t) f = f (t) independientes de f:y e respectivamente. La simbología correspondiente se muestra en la …gura (4) 5. Transformadores y elementos giratorios: En los transformadores y elementos giratorios transmiten el mismo tipo de energía en los dos puertos. Solo se presenta un cambio en la relación entre las variables de ‡ujos y esfuerzos en ambos puertos. Para el transformador, la relación está entre el esfuerzo en un puerto y el esfuerzo en el otro, y entre ‡ujo y otro. Sin embargo, para el elemento giratorio, las variables están cruzadas, es decir la relación es entre el esfuerzo y el ‡ujo en cada puerto. Este tipo de transmisor de potencia se representará simbólicamente como se muestra en la …gura (5) y se diferenciará mediante la relación constitutiva correspondiente. El elemento transformador está de…nido por la relación constitutiva siguiente e1 (t). = me2 (t) 1 f1 (t) = f2 (t) m. (18). El segundo factor es 1=m para lograr que la potencia de entrada al transformador ideal sea igual a la potencia de salida, y en consecuencia, no existe almacenamiento o disipación de energía. Esto es evidente ya que pot1 (t). = e1 (t) f1 (t) = (me2 (t)) = e2 (t) f2 (t) = pot2 (t) 44. 1 f2 (t) m.
(45) f2(t). f1(t). +. +. e2(t). e1(t). -. -. Transformador o Girador. e1 (t) : Por otro lado, la relación constitutiva para un elemento giratorio es e1 (t). = rG f2 (t) 1 f1 (t) = e2 (t) rG. (19). Las ecuaciones (19) suponen también un equilibrio de potencia para el elemento giratorio ideal. Debido a la forma cruzada de la relación entre las variables en (19), pueden obtenerse, en principio, distintas formas de comportamiento cuando los elementos giratorios se combinan con otros elementos similares o no. Esto último se ilustró con el elemento giratorio eléctrico que se discutió previamente. Ejemplo 16 Transformador mecánico traslacional: Considere la palanca mecánica con pivote mostrada en la …gura (3). Considerando la rotación en torno al pivote O, se observa que V1 (t) V2 (t) = a b de modo que. a V2 (t) b Asimismo, puesto que se supone que la palanca carece de masa (es ligera), el torque total sobre el sistema debe ser nulo, y en consecuencia V1 (t) =. F1 (t) a = F2 (t) b o sea F1 (t) =. 45. b F2 (t) a.
(46) b V1 F1. F2. a 0. V2. De…na como la constante del transformador a m = ab ; o sea m representa la relación de palanca, y obtenga entonces la siguiente relación constitutiva V1 (t). = mV2 (t) 1 F2 (t) F1 (t) = m que coincide con la del transformador generalizado b Ejemplo 17 Transformador mecánico rotacional: Considere el juego de engranajes mostrado en la …gura (3). Aquí se denotara por Ni al número de dientes del engranaje i; ! i = p i es la velocidad de cada engranaje i; i es la posición angular de cada engranaje i; con i = 1; 2: Generalmente, el acoplamiento entre los dientes de los engranajes no es perfecto, y puede existir entre ellos un espacio. Este efecto no-lineal se conoce como zona muerta. Cuando la zona muerta es pequeña, esta se desprecia y hace al juego de engranajes como un elemento lineal. Se supone también que los ejes conductores de los engranajes no tienen inercia, son in‡exible y no están sujetos a pérdidas por fricción. La relación constitutiva del juego de engranajes es ! 1 (t). =. T1 (t). =. N2 ! 2 (t) N1 N1 T2 (t) N2. De…na m=. N2 R2 = N1 R1. como la relación de engranaje o relación de velocidad. En consecuencia, ! 1 (t). = m! 2 (t) 1 T1 (t) = T2 (t) m. y esta coincide con la relación constitutiva del transformador generalizado. 46.
(47) ω2 N1 dientes. T2. R2 R1 N2 dientes. ω1 T1. Resulta evidente en base a las similitudes o analogías mostradas de los sistemas eléctricos, mecánicos traslacionales y mecánico rotacional que: 1. La corriente eléctrica, la fuerza mecánica y el torque o par rotativo son variables de ‡ujo. 2. El voltaje o diferencia de potencial eléctrico, la velocidad lineal y la velocidad angular son variables de esfuerzo. Por lo tanto: La resistencia eléctrica, el amortiguador traslacional y el amortiguador rotacional son elementos disipativos o resistencias generalizadas. La capacitancia eléctrica, la masa y la inercia son elementos capacitivos. La inductancia eléctrica, el resorte traslacional y el resorte rotacional son inertancias o inductancias generalizadas. En consecuencia se puede establecer una analogía eléctrica (no es la única) para los elementos mecánicos traslacionales que se muestra en la …gura (3) y de igual manera se puede establecer una analogía eléctrica para los elementos mecánicos rotacionales que se en muestra en la …gura (3). Ahora se plantea el siguiente procedimiento para construir el circuito eléctrico análogo a un sistema mecánico (traslacional o rotacional) dado:. 47.
(48) Elemento Mecánico Traslacional F Fuerza V=px Velocidad M Masa K Elastancia B. Elemento Eléctrico I V C 1/L. Coeficiente de 1/R Amortiguamiento. Elemento Mecánico Rotacional T Torque o Par ω=pθ Velocidad angular J Inercia K Elastancia B. Corriente Voltaje Capacitancia Inductancia recíproca Conductancia. Elemento Eléctrico I V. Corriente Voltaje. C 1/L. Capacitancia Inductancia recíproca Conductancia. Coeficiente de 1/R Amortiguamiento. 1. Identi…que cada uno de los elementos capacitivos del sistema y asígnele la correspondiente variable de esfuerzo en uno. Represente cada elemento como un condensador C con uno de sus terminales a un nodo común o tierra y asigne la variable de esfuerzo correspondiente como el voltaje del otro terminal del capacitor. 2. identi…que los elementos del sistema que están conectados a un elemento capacitivo y represéntelo como una resistencia o una inductancia de acuerdo a las tablas de analogías presentadas. 3. Identi…que los transformadores mecánicos y represéntelos como un transformador eléctrico. Determine la relación de ‡ujo de cada transformador y sea consistente con las polaridades, en el sentido que las polarizaciones del sistema mecánico dado deben coincidir con las correspondientes polarizaciones en el sistema eléctrico. 4. Coloque las fuentes de esfuerzo y de ‡ujo como fuentes de tensión o corriente de acuerdo a la aplicación de estos en el sistema real. La polaridad. 48.
(49) de las fuentes estarán de acuerdo a las polaridades de cada uno de los elementos mecánicos que constituyen el sistema. 5. Aplique métodos nodales o mallas para determinar las ecuaciones fundamentales. 6. Asigne como variables de estados de acuerdo al método de variables físicas relacionadas con los elementos almacenadores de energía, para construir el vector x: También puede usar el llamado método de fase para asignar las variables de estados, el cual consiste en seleccionar como posibles variables de estado a aquellas que aparecen derivadas en alguna de las ecuaciones fundamentales obtenidas. 7. Verifíquese que las variables de estados seleccionadas sean independientes, esto es, que no estén ligadas por una relación meramente algebraica (o sea, relaciones que no involucran derivadas o integrales). 8. Identi…que la señal de entrada u y de salida y; y determine el modelo x_ (t) = F (x (t) ; u (t)) y (t) = g (x (t) ; u (t)) si el sistema es no-lineal, o el modelo matricial x_ (t) = Ax (t) + Bu (t) y (t) = Cx (t) + Du (t) para sistemas lineales. Ejemplo 18 Considere el sistema mecánico traslacional mostrado en la …gura (3). Aplicando el método arriba sugerido se construye el circuito eléctrico equivalente (ver …gura(3)). En dicho circuito los voltajes nodales corresponden a las velocidades de las masas traslacionales del sistema mecánico, esto es Va (t) = za (t) ; Vb (t) = zb (t) ; Vc (t) = zc (t) ; La señal de entrada al sistema es u (t) = F (t), la fuerza aplicada en la masa M2 ; mientras que la salidas de interés son y1 (t) = za (t) e y2 (t) = zb (t) : Es importante notar que todos los condensadores equivalentes están conectados a un nodo común o tierra. Aplicando el método de nodos se obtienen de inmediato las ecuaciones fundamentales del sistema 32 3 2 3 2 K12 B13 M1 + B13 + K12 za (t) 0 K12 5 4 zb (t) 5 = 4 F (t) 5 4 M2 + B23 + (K5 +K12 ) B23 zc (t) 0 B13 B23 M3 + Bc. donde. Bc = B13 + B23 + B4 + B6 49.
(50) zb(t) za(t) K12 M2. xxxxxxxxxx. B13. K5. F(t). M1. xxxxxxxxxx. B4. B23. M3 xxxxxxxxxxxxxxxxxxxxxxx. B6. zc(t). En un sistema mecánico traslacional, según el método de variables físicas o acumuladores de energía, las variables de estados son los desplazamientos de los resortes y las velocidades de las masas. En consecuencia, x1 (t) = zb (t) za (t) x2 (t) = za (t) x3 (t) = zb (t) x4 (t) = zb (t) x5 (t) = zc (t) De las de…niciones de las variables de estados, se obtiene de inmediato x_ 1 (t) = x4 (t) x_ 3 (t) = x4 (t). x2 (t). y solo resta hallar, x_ 2 (t) ; x_ 4 y x_ 5 (t) ; y las cuales deberán deducirse de las ecuaciones fundamentales. De la primera ecuación se obtiene M1 x_ 2 + B13 x2 + K12 za K12 zb M1 x_ 2 + K12 (za zb ) + B13 x2 M1 x_ 2 + K12 x1 + B13 x2. B13 x5 B13 x5 B13 x5. = 0 = 0 = 0. y por lo tanto x_ 2 (t) =. K12 x1 (t) M1. B13 x2 (t) M1 50. B13 x5 (t) M1.
(51) !/B23. Va=pza. Vb=pzb 1/K12. Vc=pzc. 1/B13 1/B6. 1/K5. F(t). M2. M1. M3. 1/B4. De la segunda ecuación fundamental se deduce que x_ 4 (t) =. K12 x1 (t) M2. K5 x3 (t) M2. B23 B23 1 x4 (t) + x5 (t) + u (t) M2 M2 M2. y de la tercera ecuación fundamental se llega a x_ 5 (t) =. B13 B23 x2 (t) + x4 (t) M3 M3. Bc x5 (t) M3. Por otro lado , las ecuacione de salida se convierten en y1 (t) = x1 (t) + x3 (t) y2 (t) = x3 (t) Como resultado, el modelo en variable de estados para la planta mecánica traslacional dada será 2 3 2 3 0 1 0 1 0 0 K B B 12 13 13 6 7 6 0 7 0 0 M1 M1 M1 7 6 6 7 d 6 7 0 0 0 1 0 0 7 x (t) = 6 x (t) + 6 7 u (t) 7 6 dt K5 B23 B23 4 K12 5 4 1 5 0 M2 M2 M2 M2 M2 B13 B23 Bc 0 0 0 M M M 3. y (t). =. 1 0. 0 0 1 0 0 1 0 0. 3. 3. x (t) + [0] u (t). Ejemplo 19 Considere el sistema mecánico rotacional mostrado en la …gura (3), el cual consta de dos cilindros (modelados por las inercias J1 y J2 ) que hacen contacto entre ellos y presentan pérdidas por fricción. Esto último se representa por el coe…ciente de fricción B3 : Los cilindros también rozan con la 51.
(52) carcasa en los cuales ellos se encuentra, esto se representa por los coe…cientes B1 y B2 :Es de interés la posición angular, 3 (t) ; del cilindro J2 : Tómese como entrada al sistema el par o torsión T (t) aplicado en el resorte K1 : Empleando el procedimiento sugerido se construye el circuito eléctrico equivalente mostrado en la …gura (3). Aplicando el método nodal se obtienen las siguientes ecuaciones fundamentales 32 2 K 3 2 3 K1 1 0 p 1 (t) T (t) p p 74 6 K1 J1 p + (B1 + B3 ) + Kp1 B3 5 p 2 (t) 5 = 4 0 5 4 p K2 p 3 (t) 0 0 B3 J2 p + (B2 + B3 ) + p Ahora bien, supóngase que se desea asignar las variables de estados asociadas al sistema mediante el método de variables físicas acumuladoras de energía. Inicialmente se tienen cuatro elementos almacenadores; sin embargo, como puede verse en circuito eléctrico equivalente, el resorte K1 está en serie con la fuente de corriente T (t), y por lo tanto, éste puede eliminarse ya que no afecta el comportamiento dinámico del resto de la red y las salidas no dependen de 1 (t) : En términos del sistema original, el resorte K no existe efectivamente en la red ya que el torque se transmite completamente a través de él. Por lo tanto, sólo existen tres elementos efectivos que son aumuladores de energía J1 ; J2 y K2 ; y los cuales de…nen el vector de estados 2 3 3 (t) x (t) = 4 3 (t) 5 2 (t) De la de…nición anterior, se tiene de inmediato x_ 1 (t) = x2 (t) y por lo mencionado las ecuaciones fundamentales se reducen a J1 + (B1 + B3 ) B3 B3 J2 + (B2 + B3 ) +. 2 K2. 3. (t) (t). =. Y se obtiene entonces de la primera ecuación J1 x_ 3 (t) + (B1 + B3 ) x3 (t). B3 x2 (t) = T (t). o sea. (B1 + B3 ) 1 B3 x2 (t) x3 (t) + T (t) J1 J1 J1 mientras que de la última ecuación so tiene x_ 3 (t) =. B3 x3 (t) + J2 x_ 2 (t) + (B2 + B3 ) x2 (t) + K2 x1 (t) = 0 o sea x_ 2 (t) =. K2 x1 (t) J2. (B2 + B3 ) B3 x2 (t) + x3 (t) J2 J2 52. T (t) 0.
Figure
+4


Documento similar
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
[r]
[r]
