Detección de señales del Sistema de Posicionamiento Global (GPS) usando MATLAB
68
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Detección de señales del Sistema de Posicionamiento Global (GPS) usando MATLAB. Autor: Judiel Reyes Aguilar [email protected]. Tutor: Dr. Vitalio Alfonso Reguera [email protected]. Santa Clara 2012 "Año del 54 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. Â_t ä|Üàâw? vÉÅÉ xÄ tÜàx? áx vÉÇátzÜt vÉÇáàtÇàxÅxÇàx t ÄÉ Öâx xá w|y•v|Ä wx {tvxÜ? ç vâtÇwÉ Åöá wâÜt xá Ät àtÜxt? Åöá uÜ|ÄÄtÇàx xÄ °å|àÉAÊ TÜ|áà™àxÄxáA.
(5) ii. AGRADECIMIENTOS. T Å| ytÅ|Ä|t ÑÉÜ xÄ vtÜ|©É Öâx Åx {t wtwÉ xÇ àtÇàÉá t©ÉáA T Å| àâàÉÜ? ÑÉÜ ÄÉá vÉÇÉv|Å|xÇàÉá ç xÄ x}xÅÑÄÉ àÜtÇáÅ|à|wÉ? ç Ät vÉÇy|tÇét wxÑÉá|àtwt xÇ Å•A T Å| tÅ|zt \Çw|Üt `â©|é ÑÉÜ Ät tçâwt |ÇvÉÇw|v|ÉÇtÄ Öâx Åx w|É ÑtÜt {tvxÜ xáàt àxá|áA T Å|á vÉÅÑt©xÜÉá wx àÜtut}É Öâx àtÅu|°Ç yâxÜÉÇ ÑtÜà•v|Ñxá wx xáàt {tét©tA T Å|á vÉÅÑt©xÜÉá wx xáàâw|É ÑÉÜÖâx á|Ç xÄ xáyâxÜéÉ wx àÉwÉá ÇÉ {âu|°ÜtÅÉá ÄÄxztwÉ àtÇ Äx}Éá? ÑÉÜ Ät tÅ|áàtw Öâx ÇÉá âÇ|™ xÇ àÉwÉ ÅÉÅxÇàÉA TÄ vÄtâáàÜÉ wx ÑÜÉyxáÉÜxá wx Ät YtvâÄàtw wx XÄ°vàÜ|vt Öâx á|zâx vÉÇy|tÇwÉ xÇ ÄÉá vâÜáÉá ÑtÜt àÜtut}twÉÜxá ç ÑxÜÅ|àx Öâx ÇâxäÉá ÑÜÉyxá|ÉÇtÄxá áx á|ztÇ zÜtwâtÇwÉ ÑÉÜ xáàt w|y•v|Ä ä•t wx tâàÉ@áâÑxÜtv|™ÇA cÉÜ áâ wxw|vtv|™Ç tuÇxztwt xÇ ÇâxáàÜt xwâvtv|™ÇA T àÉwÉá ÄÉá Öâx? wx âÇt yÉÜÅt â ÉàÜt? Åx {tÇ tçâwtwÉ xÇ xáàÉá t©Éá wx Ät vtÜÜxÜtA.
(6) iii. RESUMEN. El Sistema de Posicionamiento Global (GPS) es una tecnología que cada vez tiene mayor utilización. Su importancia y desarrollo ha conducido a la necesidad de su estudio por parte de profesionales de las comunicaciones, incluidos aquellos que se desempeñan en el ambiente académico. En Cuba, aunque cada vez tiene mayor utilización, no se han desarrollado a profundidad el necesario estudio e implementación de esta tecnología. Es por esto que el objetivo principal de esta investigación es contribuir a la enseñanza de las comunicaciones mediante el desarrollo de bloques integrantes de un sistema de recepción GPS en MATLAB. En este trabajo se presenta una explicación teórica del sistema GPS; profundizando en los métodos de modulación/demodulación, multiplexación y procesamiento de las señales. Se explica además la implementación de los algoritmos de adquisición y seguimiento de la señal GPS, usando MATLAB. Los códigos de las funciones implementadas son utilizados como medio para la descripción del sistema y se incluyen íntegramente en este informe. Las funciones desarrolladas son validadas a partir del uso de datos reales. El análisis de los resultados obtenidos demuestra la eficacia de los procesos presentados..
(7) iv. ÍNDICE INTRODUCCIÓN ..................................................................................................................1 CAPÍTULO 1. Fundamentos Teóricos del Sistema de Posicionamiento Global. ..................4 1.1 Conceptos Generales del Sistema de Posicionamiento Global (GPS)..........................4 1.2. Características de la señales GPS ................................................................................5 1.2.1 Modulación ............................................................................................................5 1.2.2 Multiplexación .......................................................................................................8 1.2.3 Estructura de la señal GPS.....................................................................................9 1.3 Mensaje de navegación...............................................................................................12 1.4 El Receptor GPS .........................................................................................................14 1.4.1. Adquisición.....................................................................................................15 1.4.2 Seguimiento. ...................................................................................................17 1.4.2.1 Demodulación...............................................................................................18 1.4.2.2 Seguimiento de la portadora .........................................................................20 1.4.2.3 Seguimiento del código ................................................................................23 1.4.2.4 Efecto Doppler en el proceso de demodulación ...........................................25 1.4.3 Procesamiento de los datos de navegación. ........................................................26 1.4.3.1 Decodificación de los datos de navegación. ................................................27 CAPÍTULO 2. Implementación de Bloques de Receptor GPS usando MATLAB. .............29 2.1 Generación del Código C/A........................................................................................30 2.2. Adquisición................................................................................................................32 2.2.1. Búsqueda Serial ..................................................................................................32 2.2.2. Búsqueda FFT.....................................................................................................35 2.3. Seguimiento ...............................................................................................................36.
(8) v CAPÍTULO 3. Evaluación del Desempeño de las Funciones del Receptor GPS.................41 3.1. Datos de referencia. ...................................................................................................41 3.2. Proceso de Adquisición. ............................................................................................41 3.2.1 Comparación de los métodos de Adquisición......................................................44 3.2.2 Resultados obtenidos con la Adquisición. ..........................................................44 3.3 Proceso de Seguimiento..............................................................................................48 CONCLUSIONES Y RECOMENDACIONES ...................................................................54 REFERENCIAS BIBLIOGRÁFICAS .................................................................................55 GLOSARIO ..........................................................................................................................58 ANEXOS ..............................................................................................................................60.
(9) INTRODUCCIÓN. 1. INTRODUCCIÓN El Sistema de Posicionamiento Global, GPS (Global Positioning System) es un sistema global de navegación por satélite (GNSS) que permite determinar en todo el mundo la posición de un objeto, una persona, un vehículo o una nave, con gran precisión y exactitud. En la actualidad estos sistemas tienen muchas aplicaciones que abarcan campos que van desde la navegación terrestre, hasta materias científicas como son la topografía y la geodesia [1]. A principio de la década de 1960, varias organizaciones del gobierno de EE.UU, incluyendo el Departamento de Defensa (DOD), la Administración Nacional de Aeronáutica y del Espacio (NASA), y el Departamento de Transportación (DOT), se interesaron en desarrollar un sistema satelital que permitiera determinar la posición de objetos de manera tridimensional. Así surgió el sistema TRANSIT, en 1964. En 1973 se combinaron los programas de la Armada y el de la Fuerza Aérea de los Estados Unidos, en lo que se conoció como Navigation Technology Program (Programa de Tecnología de Navegación), este proyecto consistió en una técnica de transmisión codificada que proveía datos precisos usando una señal modulada con un código de PRN (Pseudo-Random Noise: Ruido Pseudo-Aleatorio). Posteriormente fue renombrado como NAVSTAR GPS. En un principio solo se transmitían señales conocidas como de “Servicio de Localización Preciso” (PPS, Precise Positioning Service), estas señales son encriptadas y tienen un fin militar. A partir de 1985 se comienzan a trasmitir las señales conocidas como de “Servicio de Localización Estándar” (SPS, Standard Positioning Service) para el uso civil, abriendo paso a un mayor desarrollo en el sistema y una mejor explotación de los servicios que este brinda[2]. En nuestro país, el sistema GPS, cada vez tiene mayor utilización, sobre todo, en el sector del transporte, permitiendo un mayor control sobre los recursos de este renglón económico. Otros sectores lo utilizan para investigaciones científicas, por ejemplo en Geocuba se emplea en estudios topográficos y en algunas instituciones de investigaciones agrícolas, se usa en estudios de “agricultura de precisión”..
(10) INTRODUCCIÓN. 2. Por la importancia y el desarrollo que tiene el sistema GPS en la actualidad, se hace necesario para los graduados de Telecomunicaciones conocer dicha tecnología y estudiar su funcionamiento. La Facultad de Ingeniería Eléctrica pretende mantener la competitividad de sus graduados, así como formar profesionales adaptados a los avances de la tecnología a nivel mundial. Para ello es preciso poner a disposición de los estudiantes herramientas que le permitan desarrollar el estudio del GPS. Aunque este sistema es una tecnología bien posicionada en el campo de las telecomunicaciones a nivel mundial, su estudio en Cuba es muy escaso, principalmente porque su introducción al país es muy reciente y sus servicios no han sido explotados con profundidad. A pesar de que el estudio de sus características sería de gran ayuda en la compresión de asignaturas como Fundamentos de las Comunicaciones y Radio Electrónica, no se incluye en los programas de estudio de la carrera de Ingeniería en Telecomunicaciones y Electrónica. Por otra parte la mayor parte de los profesionales de las telecomunicaciones en Cuba no están preparados en este tema y necesitan materiales de consulta e implementaciones prácticas de los mismos para su superación. Es por esto que se hace necesario incorporar este importante tema a los programas de enseñanza de la carrera de Ingeniería en Telecomunicaciones y Electrónica. El estudio de las características de las señales transmitidas por los satélites y la forma que procesan estas señales los receptores GPS, deben formar parte de los conocimientos adquiridos por los profesionales de las comunicaciones. En nuestra facultad; sin embargo, no se ha desarrollado hasta el momento ningún proyecto investigativo sobre el tema. Este trabajo se orienta hacia la realización de un estudio teórico de las características del sistema GPS, profundizando en los métodos de modulación/demodulación, multiplexación y procesamiento de las señales; y desarrollar bloques integrantes de un sistema de recepción GPS para acercarlas, como herramientas, a los estudiantes de Ingeniería en Telecomunicaciones en forma de prácticas de laboratorio de las asignaturas de Fundamentos de la Comunicaciones. El objetivo general del trabajo es contribuir a la enseñanza de las comunicaciones mediante el desarrollo de bloques integrantes de un sistema de recepción GPS en MATLAB..
(11) INTRODUCCIÓN. 3. Los objetivos específicos del trabajo de diploma son identificar los componentes del sistema GPS que puedan ser desarrollados con ayuda del MATLAB, implementar algoritmos y funciones para la recepción de señales del Sistema de Posicionamiento Global y evaluar el desempeño de los componentes del receptor GPS en diferentes escenarios. El informe de la investigación consta de introducción, capitulario, conclusiones, recomendaciones, referencias bibliográficas, glosario y anexos. El Capítulo 1 se dedica a la descripción de los Sistemas Posicionamiento Global (GPS), las características de sus señales, cómo se realiza el proceso de detección y procesamiento de la señal en los receptores GPS, además de identificar los componentes del sistema GPS que puedan ser implementados con ayuda del MATLAB. El Capítulo 2 se dedica a la descripción e implementación en MATLAB de funciones y algoritmos para la recepción de señales del sistema GPS. Y el Capítulo 3 resume los resultados de la experimentación de las funciones creadas como parte del Capítulo 2 y el análisis de los resultados obtenidos en este proceso..
(12) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 4. CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. En este capítulo se abordan los aspectos teóricos esenciales de los Sistemas Posicionamiento Global (GPS), las características de las señales y cómo se realiza el proceso de detección y procesamiento de la señal en los receptores GPS. 1.1 Conceptos Generales del Sistema de Posicionamiento Global (GPS) El sistema GPS se compone por tres sub-sistemas o segmentos[3]: . Segmento Espacial: Constituido por una constelación de 32 satélites distribuidos en 6 órbitas con un período de rotación de 12 horas, una altitud aproximada de 20 200 km y una inclinación de 55° respecto al plano ecuatorial. Esta distribución permite al usuario disponer de 5 a 8 satélites visibles en cualquier lugar del planeta.. . Segmento de control (CS): Es una serie de estaciones de rastreo, distribuidas en la superficie terrestre, que continuamente monitorea a cada satélite analizando las señales emitidas por estos. Además, este segmento tiene la función de actualizar los datos de los elementos y mensajes de navegación, así como las correcciones de los relojes de los satélites.. . Segmento usuario: Lo integran los receptores GPS que registran la señal emitida por los satélites para realizar el cálculo de su posición.. El GPS utiliza el concepto de Mediciones Tiempo de Arribo (TOA, por sus siglas en inglés) para determinar la posición del usuario. Esto consiste en la medición del tiempo que tarda una señal transmitida por un emisor (satélite), en un lugar conocido, para llegar a un receptor (usuario). Este intervalo de tiempo, denotado tiempo de propagación de la señal, se multiplica por la 8 velocidad de la señal (velocidad de la onda, c = 3.10 ) para obtener la distancia entre el. emisor y el receptor. Al hacer las mediciones de TOA de al menos cuatro satélites, se consigue el posicionamiento tridimensional del usuario. (Para más detalles sobre cómo se realizan las mediciones TOA y el cálculo de la ubicación del receptor revisar el capítulo 2 de[4]).
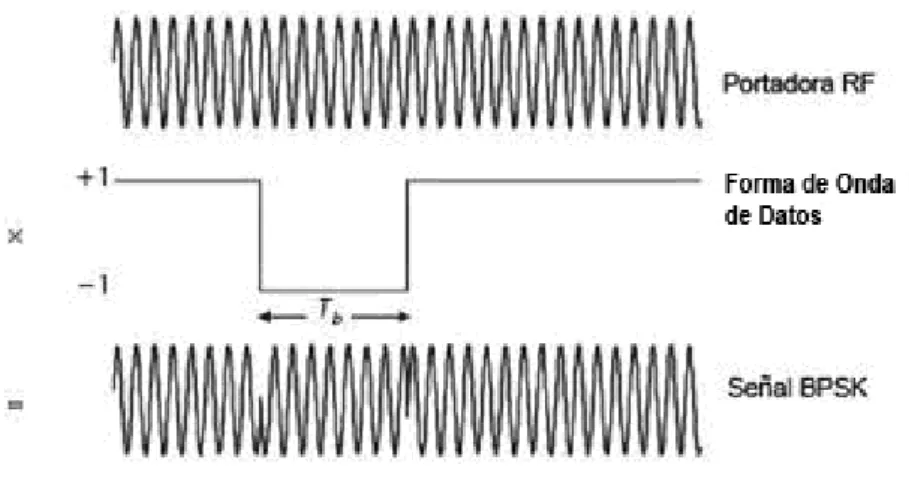
(13) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 5. 1.2. Características de la señales GPS Las señales GPS son transmitidas en dos radiofrecuencias en la banda UHF. Estas frecuencias son conocidas como L1 (154 f 0 = 1575.42 MHz ) y L2 (20 f 0 = 1227.60 MHz) y son derivadas de una frecuencia común, f 0 = 10.23 MHz[5]. Las señales están compuestas por[6]: . Portadora: La onda portadora con frecuencia f L1 o f L 2 ,. . Datos de navegación: Los datos de navegación contienen información con respecto. a las órbitas satelitales, y se transmiten a razón de bit de 50 bps. . Código PRN: Cada satélite tiene dos únicos códigos de ruido pseudo-aleatorio. (PRN, por sus siglas en inglés). El código de adquisición aproximado (C/A) para el uso civil, y el código de precisión encriptado (P(Y)) para el uso militar. El código C/A es una secuencia de 1023 chips1 que se repite cada milisegundo, dando una razón de 1.023 MHz. El código P es un código más largo (aproximadamente2 6.19 × 1012 chips) con una razón de 10.23 MHz, repitiéndose cada semana. El. código C/A es solamente modulado sobre la portadora L1 mientras el código P(Y) es modulado tanto con la portadora L1 como con la portadora L2. 1.2.1 Modulación La Modulación Binaria por desplazamiento de Fase (“Binary phase shift keying”, BPSK) es un sencillo sistema de señalización digital en el cual una portadora de RF es transmitida "tal cual" o con un desplazamiento de fase de 180º en intervalos superiores sucesivos en el tiempo, dependiendo si se transmite un 0 o un 1 digital [7]. Una señal BPSK, como se ilustra en la Figura 1.1.[4], se puede considerar como el producto de dos formas de onda, la portadora de RF sin moduladar y una forma de onda de dato que toma valores de ±1 para cada intervalo sucesivo de Tb = 1 Rb segundos; donde Rb es la razón (velocidad binaria) de. 1. Un chip corresponde a un bit. Es simplemente llamado chip para enfatizar que este no lleva información alguna. 2 El código P(Y) no se trasmite completo. Si se trasmitiera íntegramente tendría una longitud de 2,3547 × 1014 chips, durando la transmisión de los mismos 266,41 días. Por lo que la secuencia es truncada en el séptimo día, teniendo una longitud de 6,1871× 10 12 [4]..
(14) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 6. datos, en bits por segundo. La amplitud de la forma de onda de dato, para el intervalo k de Tb segundo, pueden generarse desde el dato K-bit a transmitir, usando el mapa. [0, 1] Æ [-1, + 1] o [0, 1] Æ [+ 1, -1]. En muchos sistemas se emplea detección y corrección de errores (FEC), por el cual los bits redundantes son transmitidos por el canal de acuerdo a un método prescrito, lo que permite al receptor detectar y corregir errores producidos. por el ruido, interferencia o el. desvanecimiento. Cuando se emplea FEC, comúnmente es conveniente reemplazar Tb con Ts y Rb por Rs para distinguir los símbolos de datos (los que realmente se transmiten) de. los bits de datos (que contienen la información antes de FEC). La forma de onda de dato solo se considera una señal de banda base. Esto significa que el contenido de frecuencia se concentra alrededor de 0 Hz en lugar de la frecuencia portadora. La modulación del contenido de la frecuencia portadora de RF central sobre la frecuencia de la portadora, genera lo que se conoce como una señal pasa-banda.. Figura 1.1: Modulación BPSK. Por otra parte, el Espectro Ensanchado por Secuencia Directa (“Direct Sequence Spread Spectrum”, DSSS) es una extensión de BPSK o. de otro tipo de modulación de. desplazamiento de fase. Como muestra la Figura 1.2 [4], la señalización DSSS añade un tercer componente, referido como una forma de onda ensanchada o PRN, que es similar a la forma de onda de dato, pero a una razón de símbolo mucho más alta. Esta forma de onda PRN es completamente conocida, por lo menos en los receptores previstos. La forma de.
(15) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 7. onda PRN es a menudo periódica, y la secuencia de bits finita, usada para generar la forma de onda PRN sobre un período, se refiere como una secuencia PRN o código PRN[8] .. Figura 1.2: Modulación DSSS. El intervalo mínimo de tiempo entre las transiciones en la forma de onda PRN comúnmente se conoce como periodo de chip, Tc . La porción de la forma de onda PRN sobre un Tc se conoce como chip y el recíproco del Tc es conocido como razón chipping, Rc . El parámetro de tiempo independiente para la forma de onda PRN es a menudo expresado en unidades de chips y es llamado código-fase. La señal que acabamos de describir se llama espectro ensanchado, debido al aumento del ancho de banda ocupado por la señal después de la modulación, por la alta velocidad de la forma de onda PRN. En general, el ancho de banda es proporcional a la razón chipping. Hay tres razones principales para el uso del DSSS en los Sistemas de Navegación por Satélite. Lo primero y más importante es que la frecuente inversión de la fase en la señal introducida por la forma de onda PRN permite precisar el alcance del receptor. En segundo lugar, el uso de diferentes secuencias PRN permite que múltiples satélites transmitan simultáneamente en la misma frecuencia. Un receptor puede distinguir entre estas señales basándose en sus códigos diferentes. Por esta razón, la transmisión de múltiples señales DSSS con diferentes secuencias de difusión en una frecuencia portadora común se conoce como Acceso Múltiple por División de Código (CDMA). Por último, DSSS proporciona un significativo rechazo a la interferencia de banda estrecha[4]..
(16) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 8. 1.2.2 Multiplexación. En aplicaciones de navegación, frecuentemente se requiere transmitir múltiples señales de una constelación de satélites, de un solo satélite, e incluso a una frecuencia portadora única. Hay una serie de técnicas para facilitar este intercambio de un canal de transmisión común, sin que las señales de radiodifusión interfieran entre sí[7]: El uso de frecuencias portadoras diferentes para transmitir múltiples señales se conoce. como Acceso Múltiple por División de Frecuencia (FDMA) o multiplexación por división de frecuencia (FDM). Compartir un transmisor en el tiempo entre dos o más señales se conoce como Acceso Múltiple por División de Tiempo (TDMA) o multiplexación por división de tiempo. (TDM). El uso de diferentes códigos de difusión para compartir una frecuencia portadora. común se conoce como Acceso Múltiple por División de Código (CDMA). Cuando un transmisor común se usa para transmitir múltiples señales en una única portadora, es conveniente combinar estas señales de manera que se forme una señal compuesta con una envolvente. Dos señales binarias DSSS se pueden combinar usando Desplazamiento de Fase con 4 Símbolos (QPSK). En QPSK, las dos señales son generadas. usando portadoras de RF que se encuentran en cuadratura (4 fases) de fase (es decir, tienen una diferencia de fase relativa de 90º, como funciones seno y coseno del mismo parámetro de tiempo) y simplemente se suman (al mismo tiempo). Las dos componentes de la señal QPSK se denominan in-phase (en fase) y quadraphase (cuadratura de fase). Cuando se desea combinar más de dos señales en una portadora común, se requiere de técnicas de multiplexación más complicadas. Interplexing combina tres señales binarias DSSS en una portadora común, manteniendo una envolvente constante. Para lograr esto, una cuarta señal, que está completamente determinada por las tres señales deseadas, también se transmite. En general la señal transmitida puede ser expresada en forma de una señal QPSK:. s (t ) = s I (t ) cos( 2πf c t ) − s Q (t ) sen( 2πf c t ) (1.1).
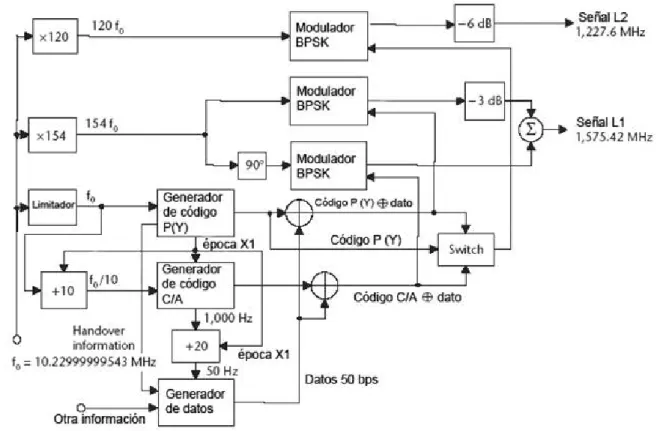
(17) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 9. con los componentes in-phase ( s I (t ) ) y quadraphas ( s Q (t ) ), como:. s I (t ) =. 2 PI s1 (t ) cos(m) − 2 PQ s 2 (t ) sen(m). sQ (t ) =. 2 PQ s3 (t ) cos(m) + 2 PI s1 (t ) s 2 (t ) s3 (t ) sen(m). (1.2). Donde: s1 (t ) , s 2 (t ) y s3 (t ) son las tres señales deseadas. f c es la frecuencia de la portadora m es un índice relacionado a la potencia de los parámetros de PI y PQ para lograr los. niveles de. potencia deseados de las cuatro señales multiplexadas (las tres deseadas más. una adicional).. 1.2.3 Estructura de la señal GPS Los satélites GPS transmiten señales de navegación en dos frecuencias portadoras llamadas L1 y L2. Las frecuencias portadoras son moduladas en DSSS por códigos de espectro ensanchado con una única secuencia PRN asociada a cada satélite y por un mensaje común de navegación. Todos los satélites transmiten en la misma frecuencia portadora utilizando CDMA. Un diagrama de bloques representativo de la estructura de la señal del satélite para L1 (154 f 0 ) y L2 (120 f 0 ) se muestra en la Figura 1.3 (donde f 0 es la frecuencia fundamental: 10,23 MHz) [5]. Como se muestra en la Figura 1.3, la frecuencia L1 (154 f 0 ) es modulada por dos códigos PRN (además de los datos del mensaje de navegación), el código C/A[9], y el código P. La frecuencia L2 (120 f 0 ) es modulada solo por el código P. Uno de los modos del código P no tiene modulación de datos. La frecuencia de referencia nominal, f 0 , es 10,23 MHz (la frecuencia exacta es f 0 =10.22999999543 MHz ajustada para efectos relativistas a una frecuencia de 10.23 MHz para el usuario). Note en la Figura 1.3 que los mismos 50 bps de los datos del mensaje de navegación, se combina tanto con el código C/A como en el código P (Y) antes de modularse con la.
(18) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 10. portadora L1. Un OR-exclusivo (denotado por ⊕) se utiliza para este proceso de modulación. Dado que el código C/A ⊕ datos y el P (Y) ⊕ datos son operaciones sincrónas, la razón de bits de transición no puede exceder la razón Chipping de los códigos PRN. Se debe tener en cuenta que la modulación BPSK es usada con las señales portadoras. El código P (Y) ⊕ datos es modulado en cuadratura de fase con el código C/A ⊕ datos en L1. Como se muestra en la Figura 1.3, la portadora L1 esta desfasada 90 º antes de ser modulada en BPSK por el código C/A ⊕ datos. Entonces este resultado es combinado con la salida atenuada de la modulación BPSK de L1 para el código P (Y) ⊕ datos.. Figura 1.3: Estructura de la señal del satélite GPS 1.2.3.1 Generación del código PRN de secuencia directa La presente sección se dedica a describir la generación del código C/A. Como el código P es reservado para el uso militar y para los objetivos de este proyecto solo se utiliza el código C/A, no se explicará la generación del código P. (Para obtener infamación sobre la Generación del código P revise el epígrafe 4.3.1.1 de [4])..
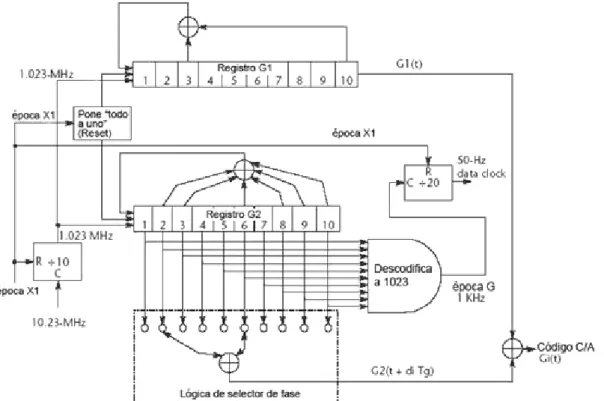
(19) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 11. La figura 1.4 [4] ilustra la arquitectura del generador de código C/A. Hay dos registros de desplazamiento de 10 bits, G1 y G2, que generan códigos PRN de longitud máxima con una longitud de 210 − 1 = 1023 bits. (El único estado no usado es el estado de “todos a. cero”). Es común describir el diseño de los generadores por medio de polinomios de la forma 1 + ∑ x i , donde x i significa que la salida del elemento i del registro de desplazamiento se usa como la entrada al sumador modulo-2 (OR-exclusivo), y el 1 significa que la salida del sumador es alimentada al primer elemento. El polinomio que describe la arquitectura del registro de desplazamiento G1 es: G1= 1 + x 3 + x10 . Los polinomios y el estado inicial, para el generador del registro de desplazamiento del código C/A se resumen en la Tabla 1.1. El único código C/A para cada satélite es el resultado del OR exclusivo, de la salida G1 y una versión retardada de la de salida G2. El retardo en el registro G2 se obtiene por el OR exclusiva de la posición seleccionada de las dos tomas cuya salida se llama G21[1].. Figura 1.4: Generador de Código C/A..
(20) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 12. Cada número PRN del código C/A está asociado con las dos posiciones de los tomas en G2. La Tabla 1 del Anexo 1 describe estas combinaciones de tomas para todos los números PRN definidos de GPS y especifica la demora de secuencia directa equivalente en los chips del código C/A. El Anexo 1 también muestra los primeros 10 chips del código C/A en formato octal.. Tabla 1.1: Generador Polinomial y estados iniciales de códigos GPS Registro Polinomio G1 Código C/A 1 + X 3 + X 10 G2 Código C/A 1 + X 2 + X 3 + X 6 + X 8 + X 9 + X 10. Estado Inicial 1111111111 1111111111. 1.3 Mensaje de navegación Como ya se ha dicho, tanto las señales de código C/A como del P (Y) se modulan con 50 bps de datos. Estos datos proporcionan al usuario la información necesaria para computar la ubicación exacta de cada satélite visible y el tiempo de transmisión para cada señal de navegación. Los datos también incluyen un importante conjunto de información auxiliar que puede ser utilizado, por ejemplo, para asistir al equipo en la adquisición de nuevos satélites, para traducir el tiempo del sistema GPS a UTC, y para corregir una serie de errores que afectan a las mediciones de rango. El mensaje de navegación GPS se transmite en cinco subtramas de 300 bits, como se muestra en la figura 1.5 [4]. Cada subtrama está compuesta de diez palabras de 30 bits. Los últimos 6 bits en cada palabra del mensaje de navegación se usan para la verificación de paridad proporcionando al equipo usuario la capacidad de detectar errores de bits durante la demodulación. Se emplea un código Hamming extendido[3]. Las cinco subtramas se transmiten en orden comenzando por la subtrama 1. Las Subtramas 4 y 5 constan de 25 páginas cada una, de modo que la primera vez que se transmiten las cinco subtramas, con la subtramas 4 y 5 se emiten la página 1. En el siguiente ciclo cuando se transmite las cinco subtramas, con las subtramas 4 y 5 se transmiten la página 2 y así sucesivamente. Normalmente el segmento de control, a través de los satélites, envía datos de navegación denominados “elementos críticos” un par de veces al día. En este modo nominal de operación, los mismos datos de navegación elementos críticos (por ejemplo, efemérides de.
(21) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 13. satélite y los datos del reloj de corrección) son transmitidos repetidamente sobre intervalos de tiempo de 2 horas. Las primeras dos palabras de cada subtrama (los bits del 1-60) contiene la telemetría de datos (TLM) y el campo (HOW). La palabra TLM es la primera de las 10 palabras de cada subtrama, e incluye un preámbulo fijo, un patrón fijo de 8 bits (10001011) que nunca cambia. Este patrón identifica el inicio de cada subtrama. Cada palabra TLM también incluye 14 bits de datos que solo tienen sentido para los usuarios autorizados. El HOW, llamado así porque permite al equipo del usuario "entregar" el resultado del seguimiento del código C/A al seguimiento del código P (Y), ofrece el tiempo de la semana (TOW) módulo de 6 segundos correspondiente al borde de la subtrama siguiente. El HOW también dispone de dos bits bandera, uno que indica si la antispoofing está activada, y uno que sirve como un indicador de alerta. Si el indicador de alerta se establece, indica que la precisión de la señal puede ser deficiente y debe ser procesado bajo el propio riesgo del usuario. Finalmente, el HOW proporciona el número de la subtrama (1-5)[1].. Figura. 1.5: Formato del Mensaje de navegación. Subtrama 1 –Contiene la información de reloj. Esta información es necesaria para calcular en qué momento el mensaje de navegación es transmitido por el satélite. Además, contiene datos de salud del satélite, indicando si los datos transmitidos por el satélite son confiables..
(22) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 14. Subtrama 2 y 3 –Contienen el dato de efemérides del satélite. Estos datos hacen referencia a la órbita del satélite y se requiere para calcular la posición del satélite. Subtramas 4 y 5 – Las dos últimas subtramas se repiten cada 12.5 minutos, dando un total de 50 subtramas. Las subtramas 4 y 5 contienen los datos de almanaque. Los datos de almanaque son el dato de efemérides y de reloj con una precisión reducida. Además, cada satélite transmite el dato de almanaque de todos los satélites GPS mientras que solo transmite los datos de efemérides para sí mismo. El resto de las subtramas 4 y 5 contienen varios datos; parámetros UTC, indicadores de salud, y parámetros de la ionosfera. Para una descripción más profunda del contenido de los datos de navegación, ver [5].. 1.4 El Receptor GPS La Figura 1.6[4] muestra un diagrama de bloques de alto nivel de un receptor GPS digital moderno. Las señales RF de todos los satélites a la vista son recibidas por una antena. Las señales RF recibidas en la antena son muy débiles por lo que son amplificadas por un preamplificador de bajo ruido (LNA), que previene una mayor degradación de la relación señal a ruido (S/N), pero no puede reducir el ruido térmico recogido por la antena. Una vez amplificada, la señal es convertida a una frecuencia intermedia (FI), mezclando la frecuencia RF con la del Oscilador Local (OL)[10]. El proceso de mezcla de la señal del OL genera dos bandas laterales, superiores e inferiores, de las señales del satélite[11]. Las bandas laterales inferiores son seleccionadas y las bandas laterales superiores son rechazadas, por un filtro de banda de paso, posterior al mezclador. El proceso de conversión A/D y las funciones de control automático de ganancia (AGC) tendrán lugar en la FI. En esta etapa un filtro antialiasing de FI debe suprimir el ruido de la banda de rechazo (señales no deseadas fuera de la banda) a niveles que son aceptablemente bajos[12]. El procesamiento de la señal GPS toma lugar en un bloque que [4] llama como “canales del receptor digital”. Cada satélite visible por la antena se destina a su propio “canal”, limitado por un número máximo de canales en el receptor. El último paso, en el receptor, es aplicar los algoritmos para el cálculo de posicionamiento..
(23) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 15. Figura. 1.6: Diagrama de bloques genérico del Receptor GPS Digital. La figura 1.7 presenta un panorama general de un “canal del receptor digital”. Como vemos en la figura, en los canales se realizan varias funciones. Primeramente se adquiere la señal, para luego pasar a procesos de seguimiento de código y de portadora, y finalmente extraer los datos de navegación.. Figura. 1.7: Esquema general del Canal del Receptor Digital. 1.4.1. Adquisición. El objetivo de la adquisición es en primer lugar, identificar si un satélite es visible para el usuario. Si el satélite es visible, la adquisición determinará las siguientes dos propiedades de la señal[13]:.
(24) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. . 16. Frecuencia: La frecuencia de la señal de un satélite puede diferir de su valor nominal. En el caso de conversión de bajada, la frecuencia nominal de la señal GPS en L1 corresponde a la FI. Sin embargo, las señales se ven afectadas por el movimiento relativo del satélite causando un efecto Doppler. (ver más detalles en el epígrafe 1.4.2.4). . Fase del código: La fase del código denota el punto en el bloque de datos actual donde comienza el código C/A. Si un bloque de datos de 1 ms es examinado, el dato incluye todo un código C/A y por lo tanto el principio del código C/A.. Muchos métodos diferentes han sido usados pero todos ellos están, de una manera u otra, basados en las propiedades de la señal GPS; especialmente las propiedades de correlación del código C/A. La señal recibida S es una combinación de señales de todos los n satélites visibles:. S = S 1 (t ) + S 2 (t ) + ... + S n (t ) (1.3) Cuando es adquirido un satélite k, la señal entrante S es multiplicada con el código C/A generado localmente correspondiente al satélite k. La correlación entre códigos C/A para diferentes satélites implica que las señales de otros satélites son casi eliminadas por este procedimiento. Para evitar eliminar el componente de la señal deseada, el código C/A generado localmente debe estar correctamente alineado en el tiempo, esto se hace con la fase del código correcta. Después de la multiplicación con el código generado localmente, la señal será mezclada con una onda portadora generada localmente. Esto se hace para eliminar la onda portadora de la señal recibida. Para eliminar la onda portadora de la señal, la frecuencia de la señal generada localmente debe ser lo más cercana posible a la frecuencia de la señal portadora[14]. Como explica el epígrafe 1.4.2.4, la frecuencia puede cambiar hasta ±10 kHz de la frecuencia nominal, entonces diferentes frecuencias dentro de esta área deben ser probadas. Para identificar si un satélite es visible, es suficiente buscar la frecuencia en saltos de 500 Hz resultando en 41 frecuencias diferentes en caso de un movimiento rápido del receptor y en 21 en caso de un receptor estático [15]..
(25) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 17. Después de mezclarse con la onda portadora generada localmente, todos los componentes de la señal son elevados al cuadrado y sumados, proporcionando un valor numérico. El proceso de adquisición trabaja como un procedimiento de búsqueda. Para cada una de las diferentes frecuencias, las 1023 fases diferentes de código son probadas. Cuando todas las posibles fases del código y las frecuencias han sido probadas, se realiza una búsqueda para el valor máximo. Si el valor máximo excede un determinado umbral, el satélite es adquirido con la correspondiente frecuencia y cambio de fase. La figura 1.8 [16] muestra una gráfica de adquisición típica. En La figura 1.8(a) se muestra un pico significativo, indicando una alta correlación, esto quiere decir que el satélite es visible para el receptor. Por el contrario, en la figura 1.8(b) todos los valores son casi idénticos indicando una baja correlación, por lo que el satélite no está visible actualmente por el receptor GPS.. (a). (b). Figura. 1.8: Grafica de la adquisición: a) del satélite 17, b) del satélite 7. 1.4.2 Seguimiento. La adquisición proporciona solo una estimación de los parámetros de frecuencia y fase de código. El propósito principal del seguimiento es refinar estos valores, mantener la pista, y demodular los datos de navegación para un satélite específico (y proporcionar una estimación del pseudorango). Un esquema de demodulación básico es el mostrado en la figura 1.9..
(26) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 18. Figura. 1.9 Esquema básico de la demodulación. La figura 1.9 muestra el esquema usado, para demodular la señal de entrada, para obtener el mensaje de navegación. Primero, la señal de entrada es multiplicada con una réplica de la portadora. Esto se hace para remover la onda portadora de la señal. En el siguiente paso, la señal es multiplicada con una réplica de código, y la salida de esta multiplicación da el mensaje de navegación. Entonces el módulo de seguimiento tiene que generar dos réplicas, una para la portadora y una para el código, para poder tener un seguimiento perfecto.. 1.4.2.1 Demodulación. Considerando a f L1 y f L 2 las frecuencias portadoras L1 y L2 de la señal transmitida del satélite k, con potencias PC , PPL1 y PPL 2 para el código C/A o código P respectivamente. La secuencia de código C/A es C k (t) y la secuencia de código P(Y) es P k (t). Si la secuencia de datos de navegación es llamada D k (t), entonces la señal total a la entrada del receptor está dada como[13]:. S k (t ) = 2 PC C k (t ) D k (t ) cos(2πf L1t ) + 2 PPL1 P k (t ) D k (t ) sen(2πf L1t ) + 2 PPL 2 P k (t ) D k (t ) sen(2πf L 2t ). (1.4). Una vez que la señal ha pasado los primeros procesos en el receptor, incluido la conversión a FI, se puede describir como:. S k (t ) =. 2 PC C k (t ) D k (t ) cos(ω FI t ) + 2 PPL1 P k (t ) D k (t ) sen(ω FI t ) (1.5). donde ω FI es la frecuencia intermedia..
(27) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 19. Luego esta señal es muestreada por un convertidor A/D. De manera que el último término de la ecuación (1.5) es limpiado y no puede ser demodulado ya que se describe como ruido. e(n). La señal del satélite k después de la conversión A/D puede ser descrita como:. S k (n) = C k (n) cos(ω FI n) + e(n) (1.6) con n en unidades de 1 f s ( s ) ; donde n indica que la señal es discreta en el tiempo. Para obtener el dato de navegación D k (n) de la señal anterior, la señal tiene que ser convertida a banda base. La eliminación de la portadora se hace multiplicando la señal de entrada con una réplica de la portadora como se mostró en la figura 1.9. Si la réplica de la portadora es idéntica a la portadora entrante tanto en frecuencia como en fase, el producto de ambos es:. S k ( n) cos(ω FI n) = C k ( n) D k ( n) cos(ω FI n) cos(ω FI n) =−. (1.7) 1 k 1 C ( n) D k ( n) − cos( 2ω FI n)C k ( n) D k ( n) 2 2. Donde el primer término es el mensaje de navegación multiplicado por el código PRN y el segundo término es una portadora con el doble de la frecuencia intermedia. La última parte de la señal puede ser removida solo aplicando un filtro paso bajo. La señal después del filtro paso bajo es:. 1 k C (n) D k (n) (1.8) 2 El siguiente paso es remover el código C k (n) de la señal. Esto se hace correlacionando la señal con una réplica local de código. Si la réplica de código es exactamente la misma como el código en la señal, la salida de la correlación es: N −1. ∑C. k. ( n )C k ( n ) D k ( n ) = ND k ( n ) (1.9). n =0. Donde ND k (n) es el mensaje de navegación multiplicado por una cantidad de puntos en la señal N..
(28) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 20. La descripción anterior de la demodulación es solo para una señal con un satélite. Esto se hace para reducir la complejidad de las ecuaciones y dar una idea simple del esquema de demodulación. En el esquema de demodulación mostrado en la figura 1.9, dos réplicas locales de la señal son generadas. Para producir una réplica exacta se necesitará algún tipo de retroalimentación. El lazo de retroalimentación para producir la réplica de la portadora es llamado lazo de seguimiento de portadora, y el lazo de retroalimentación que produce la réplica exacta de código es llamado lazo de seguimiento de código.. 1.4.2.2 Seguimiento de la portadora Para demodular los datos de navegación satisfactoriamente, se debe generar una réplica exacta de la onda portadora. Para seguir la onda portadora de la señal regularmente son usados los lazos de seguimiento de fase (PLL) o los lazos de seguimiento de frecuencia (FLL).. Figura. 1.10: Diagrama a bloques básicos del lazo de seguimiento de portadora. La figura 1.10 [16] muestra un diagrama a bloques básico para un lazo de seguimiento de fase (PLL). Las primeras dos multiplicaciones quitan la portadora y el código PRN de la señal de entrada. Para quitar el código PRN, se usa la salida I P del lazo de seguimiento de código early –late (descrito más adelante). El discriminador de lazo es usado para encontrar el error de la fase sobre la réplica local de la onda portadora. La salida del discriminador, que es el error de la fase (o una función del error de la fase), es entonces filtrada y se utiliza como retroalimentación al oscilador controlado numéricamente (NCO), que ajusta la frecuencia de la onda portadora local. De esta manera la onda portadora local será una réplica casi exacta de la onda portadora de la señal de entrada..
(29) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 21. Figura. 1.11: Lazo Costa usado para seguir la onda portadora. El problema con usar un PLL ordinario es que este es sensible a los cambios de fase de 180º. Debido a la transición de los bits de navegación, el PLL utilizado en un receptor GPS tiene que ser insensible a los cambios de fase de 180º. Por esta razón es que se utiliza un Lazo Costa, el cual no es afectado por estos cambios. La figura 1.11 [16] muestra un lazo de Costas, el cual tiene dos multiplicaciones. La primera multiplicación es el producto entre la señal de entrada y la onda portadora local, la segunda multiplicación es entre la onda portadora con un cambio de fase de 90º y la señal de entrada. El objetivo del lazo de Costas es tratar de mantener toda la energía en la rama. In-phase (I). Para esto se necesita la retroalimentación al oscilador. Si se asume que la réplica de código en la figura 1.11 está perfectamente alineada, la multiplicación en (I) produce la siguiente suma:. D k ( n) cos(ω FI n) cos(ω FI n + ϕ ) =. 1 k 1 D (n) cos(ϕ ) + D k (n) cos( 2ω FI n + ϕ ) (1.10) 2 2. Donde φ es la diferencia de fase entre la señal de entrada y la réplica local de la portadora. La multiplicación en la rama quadraphase (Q) está dada por:. D k ( n) cos(ω FI n) sen(ω FI n + ϕ ) =. 1 k 1 D (n) sen(ϕ ) + D k ( n) sen( 2ω FI n + ϕ ) (1.11) 2 2.
(30) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 22. Si las dos señales son filtradas por el filtro paso bajo después de la multiplicación, los dos términos con el doble de la frecuencia intermedia son eliminadas y las siguientes dos señales quedan de la siguiente manera:. Ik =. 1 k D cos(ϕ ) (1.12) 2. Qk =. 1 k D sen(ϕ ) (1.13) 2. Para encontrar un término de retroalimentación al oscilador de fase de portadora, este puede ser visto como el error de la fase de la réplica local de la portadora y puede ser encontrada como:. 1 k D (n) sen(ϕ ) Q 2 = = tan(ϕ ) (1.14) 1 k Ik D (n) cos(ϕ ) 2 k. ⎛ Qk ⎞. −1 , ϕ = tan ⎜⎜ k ⎟⎟ (1.15) ⎝I ⎠. De la ecuación (1.15), puede ser visto que el error de la fase es minimizado cuando la correlación en la rama Q es cero y el valor de correlación en la rama I es la máxima. El discriminador de la ecuación (1.15) es el más preciso de los discriminadores Costas, pero es también el que más tiempo consume. A la hora de escoger el diseño del lazo de seguimiento de la portadora, hay que tener en cuenta que los lazos Costas así como los PLL son sensibles a la tensión dinámica, pero los Costa producen mediciones más precisas que los PLL. Para un nivel de potencia de la señal dada, los lazos Costas también proporcionan la mejor demodulación de datos sin error en comparación con los sistemas que utilizan FLL. Por estas razones los lazos Costas suelen ser los discriminadores utilizados en el diseño de los lazos seguimiento de la portadora para los receptores GPS. No obstante durante la adquisición de la señal inicial, cuando el receptor no sabe dónde están los límites de transición de datos, por lo general, es más fácil de mantener el seguimiento de la frecuencia que el seguimiento de la fase, con la señal de.
(31) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 23. satélite, en el desempeño de sincronización de bit. Esto hace que los FLLs también sean discriminadores a tener en cuenta. (Para obtener más detalles sobre los lazos de seguimiento de portadora con FLL revisar el epígrafe 5.3.3 de [4]). 1.4.2.3 Seguimiento del código El objetivo para un lazo de seguimiento de código es mantener la pista de la fase de un código específico en la señal. El lazo de seguimiento de código en los receptores GPS es un. lazo de seguimiento de retrazo (DLL – Delay Lock Loop). El objetivo del DLL es correlacionar la señal de entrada con las tres réplicas de código como se muestra en la figura 1.12[16].. Figura. 1.12: Diagrama a bloques básico del lazo de seguimiento de código. El primer paso (mostrado en la figura 1.12) es convertir el código C/A a banda base, para multiplicar la señal de entrada con una réplica local perfectamente alineada de la onda portadora. Después la señal es multiplicada con tres réplicas de código. Las tres réplicas están normalmente generadas con un espaciamiento de ±1/2 chip. Después de esta segunda multiplicación, las tres salidas pasan a la etapa de integración y descarga. La salida de estas integraciones es un valor numérico el cual indica cuánto se parece la réplica de código con el código en la señal de entrada. Las salidas de las tres correlaciones I E , I P y I L son entonces comparadas para ver cuál de todas proporciona la correlación más alta. La figura 1.13 [16] muestra un ejemplo del seguimiento de código..
(32) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 24. En la figura 1.13 (a) el código late tiene la correlación más alta, entonces la fase de código debe de ser disminuida, por ejemplo, la secuencia de código debe ser retrasada. En la figura 1.13(b) el pico más alto está localizado en la réplica prompt, y las réplicas early y late tienen la misma correlación, la fase del código es correctamente seguida y el lazo está correctamente sincronizado. El DLL con tres correladores, como el de la figura 1.12, es óptimo cuando la onda portadora local está bloqueada en fase y frecuencia. Pero cuando hay errores de fase en la onda portadora local, la señal tendrá mucho ruido, por lo que será difícil que el DLL pueda mantener el bloqueo sobre el código. Por estas razones se recomienda utilizar el diseñado que muestra la figura 1.22 [16].. Figura. 1.13: Seguimiento de código. El diseño de la figura 1.14 tiene la ventaja que es independiente de la fase en la onda portadora local. Si la onda portadora local está en fase con la señal de entrada, toda la energía estará en la rama I. Pero si la fase de la portadora local cambia respecto a la fase de la señal de entrada, la energía en las ramas I y Q..
(33) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 25. Figura. 1.14: Diagrama a bloques del DLL con seis correladores. El desempeño del lazo de seguimiento de código tiene que ser independiente del desempeño de lazo de seguimiento de fase, el lazo de seguimiento tiene que usar las ramas. In-phase y quadraphase para el seguimiento del código.. 1.4.2.4 Efecto Doppler en el proceso de demodulación El efecto Doppler es un fenómeno, observado para las ondas de acústica y electromagnética, que se caracteriza por un cambio en la frecuencia aparente de una onda, como resultado del movimiento relativo entre el emisor (satélite) y el receptor. La frecuencia Doppler, en el sistema GPS, puede cambiar acercándose a valores tan altos como 10 kHz en caso de una velocidad máxima del satélite combinada con una muy alta velocidad del usuario [1]. Para un receptor estacionario, el cambio de la frecuencia Doppler nunca será superior a 5 kHz. Estos cambios de frecuencia causan rotaciones en la fase instantánea de la señal modulada recibida por el receptor. Si la diferencia de frecuencia es muy grande, la rotación de fase instantánea no puede discriminarse de las rotaciones de fase de ±180º, que se ocasionan en.
(34) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 26. la modulación BPSK de la señal. Esto confunde el proceso de demodulación de datos, causando posible pérdida en el lazo de seguimiento [4]. Por esta razón a la hora de diseñar el proceso de seguimiento, se deben buscar mecanismos que compensen estas rotaciones. (Más detalles en [17, 18]).. 1.4.3 Procesamiento de los datos de navegación. La velocidad del dato de navegación es 50 bps. Mientras que la velocidad de muestreo a la salida del bloque de seguimiento es de 1000 muestras por segundo (sps). Por lo que antes que los datos de navegación puedan ser decodificados, la señal resultante del bloque de seguimiento debe ser convertida de 1000 sps a 50 bps. Es decir que 20 muestras consecutivas serán cambiadas por 1 bit. A este procedimiento de conversión se le conoce como sincronización de bit.. Figura. 1.15: Se muestra la salida del bloque de seguimiento. La primera tarea del procedimiento de sincronización de bit es encontrar el tiempo en una secuencia donde ocurre la transición de bit. Primero, se debe detectar los cruces por cero. Un cruce por cero es donde la salida cambia de 1 a -1, o viceversa. Cuando un cruce por cero es localizado, el tiempo de una transición de bit es localizado. Cuando el tiempo de una transición de bit es conocido, es posible encontrar todos los tiempos de la transición de bit. Estos se encuentran separados 20 ms del principio de la primera transición de bit.
(35) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 27. detectada. La figura 1.15 [16] muestra como todas las transiciones de bit son encontradas en una secuencia de 1 segundo. Las líneas punteadas marcan las transiciones de bit separadas cada 20 ms. La señal de la figura es muy fuerte, una señal débil tendrá puntos más cerca de cero. Cuando el tiempo de la transición de bit es localizado, la señal a 1000 sps será convertida a una tasa de bit de 50 bps. Para hacer esto, 20 muestras serán remplazadas por un bit. Una vez obtenidos los bits de navegación, por medio de la sincronización de bit, estos deben ser decodificados.. 1.4.3.1 Decodificación de los datos de navegación. El primer paso en el proceso de decodificación es determinar donde comienza una subtrama. Como explica la sección 1.3, cada subtrama comienza con un preámbulo fijo de 8 bits, en la palabra TLM. El patrón de dicho preámbulo es 10001011. Hay que tener en cuenta que debido a que los lazos Costa tienen la habilidad de seguir la señal con cambios de fase de 180º, este preámbulo puede ser invertido (01110100). Como estos dos patrones pueden encontrarse en cualquier lugar de los datos recibidos, entonces se debe realizar un chequeo para autentificar este preámbulo. El procedimiento de autentificación comprueba si el mismo preámbulo se repite cada 6 segundos, correspondiente al tiempo que tarda entre la transmisión de dos subtramas consecutivas. La búsqueda del preámbulo es implementada a través de la correlación. La primera entrada a la función de correlación es la secuencia entrante de bits de los datos de navegación. La segunda entrada a la función de correlación es el preámbulo de 8 bits también representado con -1’s y 1’s. Cuando usamos valores de -1 y 1 en lugar de 0 y 1, la salida de la función de correlación es 160 cuando el preámbulo es localizado y -160 cuando un preámbulo invertido es localizado. Un ejemplo de la correlación entre una secuencia de datos de navegación y el preámbulo puede ser visto en la figura 1.16 [16]. Cuando el preámbulo correcto es localizado, el dato de cada subtrama puede ser extraído. Si embargo, si la correlación muestra que el preámbulo está invertido, toda la secuencia de navegación debe ser invertida antes de extraer los datos..
(36) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DEL SISTEMA DE POSICIONAMIENTO GLOBAL. 28. Figura. 1.16: Correlación entre 37 segundos de datos de navegación y el preámbulo de 8 bits. Los picos indican la ubicación del comienzo de una subtrama. Una vez decodificados los datos y sabiendo la estructura de cada subtrama (ver sección 1.3) se pueden extraer los datos de navegación. Después de leer alrededor de 30 segundos de datos, se establecerá el comienzo de una subtrama para determinar el momento cuando el dato fue transmitido por el satélite. Una vez determinado el tiempo de transmisión, los datos de efemérides serán decodificados. Estos se utilizarán para calcular la posición del satélite en el momento de la transmisión. Luego se calculará el pseudorango. Los pseudorangos son calculados basándose en el momento de transmisión del satélite y el tiempo de llegada al receptor. El tiempo de llegada se basa en el comienzo de la subtrama. Finalmente se calcula la posición del usuario. La posición es calculada con los valores del pseudorango y la posición del satélite encontrada por los datos de efemérides..
(37) CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. 29. CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. En este capítulo explica las funciones y algoritmos, para la recepción de señales del sistema GPS, desarrollado durante la realización de este trabajo. Se incluye un breve preámbulo teórico al inicio de cada epígrafe que se considera necesario para un mejor entendimiento del funcionamiento del sistema. En cada epígrafe se incluyen las funciones en MATLAB que componen el sistema con el fin de ilustrar mejor los métodos y algoritmos utilizados. Todo el sistema ha sido programado utilizando MATLAB versión 7.4.0.287 (R2007a), por tanto algunas funciones empleadas presentan problemas de compatibilidad con versiones anteriores de este software. Como explica el epígrafe 1.7 del capítulo 1, el procesamiento de la señal GPS toma lugar en los canales del receptor digital. Como muestra la figura 1.14 el primer paso en el procesamiento digital de la señal es la adquisición, donde se determina que satélite esta visible para el usuario. Luego se realiza el proceso de seguimiento donde se demodulan los datos de navegación. Y finalmente se extraen los datos de navegación, para luego ser procesados y realizar los cálculos de la posición. Para realizar todos estos procesos, previamente, la señal debe ser demodulada de su portadora. Es por esto que en la descripción de estos procesos, en el capítulo 1, se explica que en alguna parte de los mismos se debe hacer una correlación con una onda portadora generada localmente. Sin embargo para los objetivos de este proyecto se asume que la señal ya esta en banda-base. Por lo que no se implementan los procesos de demodulación de la señal. Teniendo en cuenta los objetivos de este proyecto, solo se implementan los algoritmos de adquisición y seguimiento de la señal GPS. Para más información sobre la implementación de los procesos de extracción y decodificación de los datos, y los calculo de posicionamiento revisar[1]..
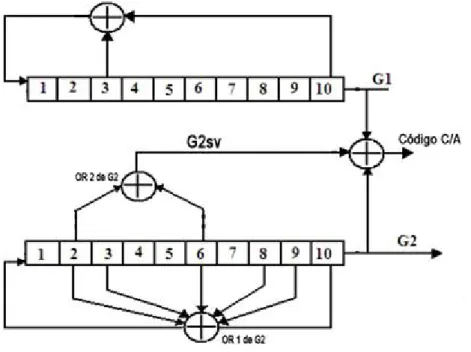
(38) CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. 30. 2.1 Generación del Código C/A Antes de explicar la implementación de la adquisición y seguimiento, es necesario hablar de la generación del código C/A. Ya que estos procesos requieren de la generación de dicho código para su funcionamiento. En el epígrafe 1.2.3.1 del capítulo 1 se expone como se generan estos códigos en los satélites. Como se explica en dicha sección que el generador de código C/A está formado por dos registros desplazamientos de 10 bit, G1 y G2, que se realimentan linealmente; generando un código pseudo aleatorio (PRN) de 1023 bits de longitud (ver figura 2.1) [19].. Figura 2.1: Diagrama del Generador de Código C/A. Ambos registros se inicializan en el estado todo a uno. El registro G1 esta formado por una suma módulo-2 (OR-exclusivo), de los estados 3 y 10, que alimenta la entrada del registro. Por su parte el registro G2 está formado por dos sumas módulo-2 (OR-exclusivo). El primer OR de G2, lo integran los estados 1,2, 3, 6, 8, 9 y 10, y alimenta la entrada del registro. El segundo OR de G2 es la suma de dos bits del registro que son seleccionados según la identificación del satélite (por ejemplo en el satélite 1 los bits que integran en OR son el 2 y el 6). La Tabla 1 del Anexo 1 resume los bits que utiliza este OR para cada uno de los satélites..
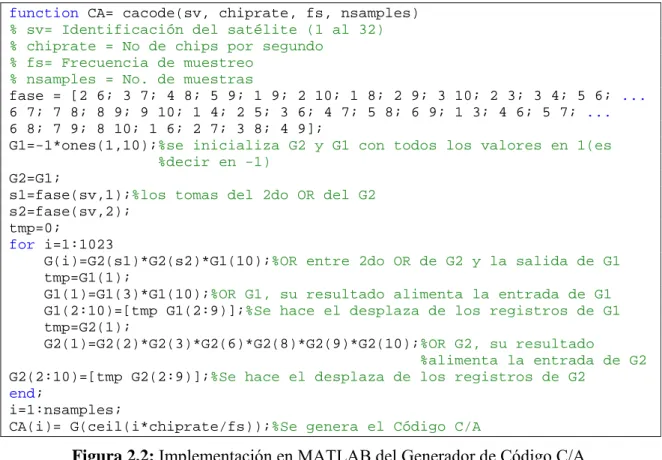
(39) CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. 31. Como se ilustra en la figura 2.1, el código C/A es el resultado de la suma un OR-Exclusivo de la salida del G1 y la salida del segundo OR de G2 (llamada G2sv).. Tabla 2.1 Operación OR exclusivo Entrada Entrada Salida 0 0 0 0 1 1 1 0 1 1 1 0. Multiplicación Ordinaria Entrada Entrada Salida -1 -1 +1 -1 +1 -1 +1 -1 -1 +1 +1 +1. Hay que tener en cuenta que cuando en el satélite se realiza la modulación BPSK, la secuencia binaria se representa por la representación polar de no retorno a cero. Por lo que la secuencia toma valores de +1 o -1, donde el 0 equivale a +1 y el 1 equivale a -1. Como una multiplicación entre valores de +1 y -1 es equivalente a un OR de valores de 0 y 1 (como se demuestra en el tabla 2.1), a la hora de programar en el MATLAB, el OR puede ser sustituido por una simple operación de multiplicación de valores de ±1. La figura 2.2 muestra las líneas de código utilizadas para la implementación en MATLAB del generador de código C/A. function CA= cacode(sv, chiprate, fs, nsamples) % sv= Identificación del satélite (1 al 32) % chiprate = No de chips por segundo % fs= Frecuencia de muestreo % nsamples = No. de muestras fase = [2 6; 3 7; 4 8; 5 9; 1 9; 2 10; 1 8; 2 9; 3 10; 2 3; 3 4; 5 6; ... 6 7; 7 8; 8 9; 9 10; 1 4; 2 5; 3 6; 4 7; 5 8; 6 9; 1 3; 4 6; 5 7; ... 6 8; 7 9; 8 10; 1 6; 2 7; 3 8; 4 9]; G1=-1*ones(1,10);%se inicializa G2 y G1 con todos los valores en 1(es %decir en -1) G2=G1; s1=fase(sv,1);%los tomas del 2do OR del G2 s2=fase(sv,2); tmp=0; for i=1:1023 G(i)=G2(s1)*G2(s2)*G1(10);%OR entre 2do OR de G2 y la salida de G1 tmp=G1(1); G1(1)=G1(3)*G1(10);%OR G1, su resultado alimenta la entrada de G1 G1(2:10)=[tmp G1(2:9)];%Se hace el desplaza de los registros de G1 tmp=G2(1); G2(1)=G2(2)*G2(3)*G2(6)*G2(8)*G2(9)*G2(10);%OR G2, su resultado %alimenta la entrada de G2 G2(2:10)=[tmp G2(2:9)];%Se hace el desplaza de los registros de G2 end; i=1:nsamples; CA(i)= G(ceil(i*chiprate/fs));%Se genera el Código C/A. Figura 2.2: Implementación en MATLAB del Generador de Código C/A..
(40) CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. 32. 2.2. Adquisición Como se ha explicado cada satélite trasmite un código C/A que es diferente al transmitido por los demás satélites. El receptor GPS debe correlacionar la señal recibida con cada uno de los 32 códigos C/A, para determinar qué satélite está disponible para el usuario. Para cada código el receptor debe realizar una búsqueda en dos dimensiones: la frecuencia y la fase [20]. A este proceso se le llama Adquisición. Además de determinar que satélite es visible para el usuario, la adquisición debe determinar dónde comienza un periodo del código C/A. Es decir desde dónde comienzan los datos, de un satélite determinado. Este parámetro se le llama fase del código C/A. Por otra parte, durante la transmisión ocurre una desviación de la señal portadora causada por el efecto Doppler. Aunque se asume que ya la señal está en banda-base y no es necesario determinar la portadora para que sea demodulada, sí se debe calcular los cambios en su frecuencia, para que en el proceso de seguimiento se puedan compensar las afectaciones que provoca este corrimiento. Para esto se utiliza complejos algoritmos de seguimiento de la portadora, como los descritos en el capítulo 1. Sin embargo el desplazamiento Doppler, puede estimarse fácilmente a partir de la fase del código, por lo que, en este proyecto, se propone implementar este proceso dentro del algoritmo de seguimiento, como un elemento de la compensación del efecto Doppler. Por lo que se explicará en detalles en el epígrafe 2.3. Existen varias técnicas para realizar el proceso de Adquisición, a continuación se explicaran los dos métodos más utilizados. Para más información sobre otros métodos para implementar la Adquisición, ver [21-23]. 2.2.1. Búsqueda Serial La Búsqueda Serial es el algoritmo de adquisición más sencillo y más utilizado. En este método se utiliza el correlacionador no coherente mostrado en la figura 2.3. La señal que entra al correlacionador tiene la forma de la ecuación 2.1, donde la señal recibida (S) es una combinación de señales de todos los n satélites visibles. Es por esto que el primer paso es definir la señal del satélite especifico, para esto la señal entrada se multiplica por la replica del código C/A del satélite a buscar, CA[n + m]. Donde n representa la n muestra y m el.
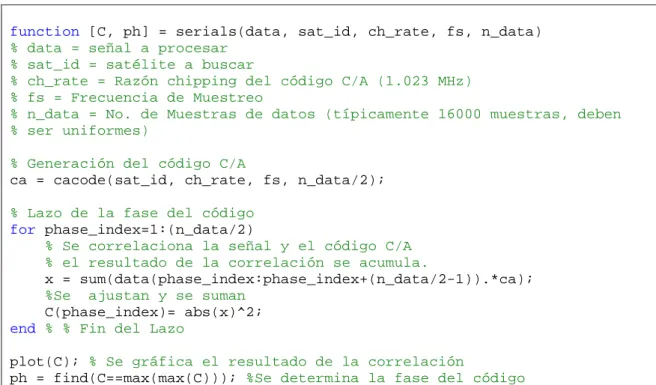
(41) CAPÍTULO 2. IMPLEMENTACIÓN DE BLOQUES DE RECEPTOR GPS USANDO MATLAB. 33. número de muestra que es desplazado la replica del código C/A [24]. Por ejemplo para una frecuencia de muestreo de 8 MHz, la longitud de un periodo de código C/A es 8000.. S = S 1 (t ) + S 2 (t ) + ... + S n (t ) (2.1) Una vez definido la señal del satélite especifico, se separan los componentes in-phase y. quadraphase de dicha señal. Luego las componentes I y Q se acumulan para uno o más períodos de código. La suma acumulada se eleva al cuadrado, se correlacionan entre sí y se suman para producir un valor de correlación promedio[25].. Figura 2.3: Correlacionador No Coherente en el dominio del tiempo. La salida del sistema es el valor de correlación que hay entre la señal de entrada y la señal generada localmente. Si se excede un umbral predefinido significa que el satélite fue adquirido. Para ubicar la fase donde comienza la señal del satélite, este proceso se debe ejecutar dentro de un lazo, probando el proceso de correlación en las distintas muestras de la señal capturada. Si en una de las muestras el resultado de la correlación genera un pico de potencia mayor al umbral predefinido, significa que es la fase correcta y que a partir de esta muestra se encuentran los datos de navegación del satélite. Las figuras 2.4 y 2.5 muestran dos maneras de implementar este proceso en MATLAB..
Figure

+7



Outline
Documento similar