Diseño de la arquitectura de hardware de un vehículo submarino autónomo
63
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Diseño de la arquitectura de hardware de un Vehículo Submarino Autónomo Autor: Alexei Díaz Gómez E-mail: [email protected]. Tutor: Msc. Alain Sebastián Martínez Laguardia Profesor Auxiliar Departamento de Automática y Sistemas Computacionales Facultad de Ingeniería Eléctrica E-mail: [email protected]. Consultante: Ing. Rubén Eduardo Carlés Barrero E-mail: [email protected] Santa Clara 2009 "Año del 50 Aniversario del Triunfo de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Jefe de. Firma del Autor. Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i PENSAMIENTO. La inteligencia humana tiene como leyes la investigación y el análisis José Martí.
(5) ii DEDICATORIA. Dedico mi tesis especialmente a la mejor madre del mundo, mi mamá, que ha sido siempre el impulso de todas mis decisiones y ha puesto todo su empeño en guiarme por el camino del bien y apoyarme en todos los momentos de mi vida. A mi novia que ha estado a mi lado en estos últimos años dándome su amor y dedicación en todos los momentos. A la memoria de mi padre que siempre he tratado que se sienta orgulloso de mi. A mis abuelos que siempre me han dado su amor y me han apoyo para que siga adelante. A mi hermano y a mis sobrinos que son también motivo de mi existencia. A los profesores que a lo largo de mi carrera han puesto todo su empeño y dedicación brindándome lo mejor de sus conocimientos..
(6) iii AGRADECIMIENTOS. Me satisface dejar constancia de mis más profundos agradecimientos a todos los que con su apoyo han contribuido a mi formación y han dedicado una parte de su tiempo para contribuir en la realización de mi vida profesional y con la de este trabajo. Quiero hacer nuevamente un agradecimiento especial a mi mamá que me ha brindado siempre su apoyo incondicional y desinteresado en todo momento y ha puesto todo su empeño para que siempre salga adelante en mis estudios y en mi vida. A mis primos de Santa Clara Cosme, Zule y Vladi que me han apoyado durante estos años para que me pueda realizar como profesional. A mi Tia Maria y Nury que siempre han estado sobre mi dándome su apoyo en todo momento. A mi suegra que siempre esta dispuesta a la darme la mano a la hora que me haga falta con la mayor disposición del mundo. A mis amigos de todos los tiempos Ariel y Oscar que a pesar de los años y la distancia, somos amigos de corazón. A mis amigos Yulien, Roly, Carrete, Jorge, Dayton, el Ciencia y demás que han estado a mi lado en los buenos y malos momentos y que también me han dado su apoyo para mi realización profesional. A todos lo profesores que de una forma u otra han puesto todo su esfuerzo para lograr en mi un profesional bien preparado..
(7) iv TAREA TÉCNICA. 9 Revisión de la bibliografía disponible para determinar que se ha hecho al respecto en el mundo y analizar otras arquitecturas planteadas por algunos fabricantes e investigadores. 9 Selección de la unidad de cómputo en función de las prestaciones y estrategia de control seleccionada. 9 Selección de los sensores a emplear.. 9 Diseño de la arquitectura que muestre mayores posibilidades para los usuarios de la aplicación. 9 Análisis de los sensores principales de la arquitectura así como del sistema de comunicaciones de bajo nivel.. Firma del Autor. Firma del Tutor.
(8) v RESUMEN. En la actualidad, las inspecciones submarinas son una cuestión de primer orden en múltiples ramas del conocimiento. La utilización de un dispositivo que sea capaz de realizar estas tareas evitando los riesgos y altos costos que puedan implicar las mismas, es un reto que han asumido muchos investigadores en el mundo. La Universidad Central “Marta Abreu” de Las Villas, a solicitud del CIDNAV (Centro de Investigaciones Navales), se trazó como meta desarrollar la arquitectura de hardware para un Vehículo Submarino Autónomo Hidrográfico (VSAH), con el objetivo de realizar inspecciones marinas y de supervisión.. El presente trabajo expone los resultados alcanzados en la realización del mismo, como son: el desarrollo de la arquitectura de hardware capaz de integrar un arreglo sensorial amplio a un sistema de cómputo para obtener resultados confiables, con el menor costo computacional y complejidad posible, respetando aspectos como modularidad, portabilidad, escalabilidad y reutilización, así como la selección de los sensores que forman parte de la misma y el análisis a tener en cuenta a la hora de la selección. Para ello, se realizó una búsqueda sobre que se esta haciendo al respecto en el mundo, lo que permitió hacer una comparación con prototipos similares a el que se ocupa..
(9) vi. TABLA DE CONTENIDOS PENSAMIENTO ........................................................................................................i DEDICATORIA.........................................................................................................ii AGRADECIMIENTOS ............................................................................................. iii TAREA TÉCNICA ...................................................................................................iv RESUMEN ...............................................................................................................v INTRODUCCIÓN .................................................................................................... 1 Organización del inforrme.................................................................................... 3 CAPÍTULO 1. MARCO TEÓRICO ........................................................................ 4 1.1. Antecedentes y motivaciones personales................................................. 5. 1.2. Definición de Vehículo Submarino Autónomo ......................................... 6. 1.3. Aplicaciones de los AUV........................................................................... 6. 1.4. Ventajas y desventajas de los AUV .......................................................... 8. 1.4.1. Ventajas de los AUV.......................................................................... 8. 1.4.2. Ventajas de los AUV con respecto a los ROV ................................... 9. 1.5. Innovación .............................................................................................. 10. 1.6. Trabajos relacionados............................................................................. 11. 1.6.1. Vehículo Submarino Autónomo SAUCISSE .................................... 11. 1.6.2. Vehículo Submarino Autónomo STARFISH .................................... 12. 1.6.3. Comparación entre las arquitecturas expuestas.............................. 13. CAPÍTULO 2. ARQUITECTURA DE HARDWARE ............................................. 15 2.1. Arquitectura general de hardware........................................................... 15. 2.1.1. Necesidades que debe cumplir el hardware del vehículo................ 15.
(10) vii 2.1.2 2.2. Estructura general ........................................................................... 16. Sistema de navegación........................................................................... 17. 2.2.1. Sistema de posicionamiento ............................................................ 17. 2.2.2. Sistema de navegación inercial ....................................................... 18. 2.2.3. Unidad de movimiento inercial......................................................... 19. 2.2.4. Sistema de posicionamiento global ................................................. 19. 2.2.5. Selección de equipamiento.............................................................. 20. 2.3. Sistema de detección de obstáculos....................................................... 21. 2.3.1. Forward Looking Sonar (color twinscope) ....................................... 21. 2.4. Sistema de estado .................................................................................. 22. 2.5. Sistema de cómputo ............................................................................... 23. 2.6. Sistema de comunicación ....................................................................... 24. 2.7. Arquitectura de hardware........................................................................ 25. CAPÍTULO 3. OPERACIÓN DE SISTEMA ......................................................... 27 3.1. Descripción de la arquitectura de hardware............................................ 27. 3.2. Características de la MTi-G .................................................................... 28. 3.2.1. Calibración....................................................................................... 28. 3.2.2. Limitaciones..................................................................................... 28. 3.2.2.1 Limitaciones IMU............................................................................ 29 3.2.2.2 Limitaciones GPS........................................................................... 29 3.2.3. Tiempo requerido para obtener los datos ........................................ 30. 3.2.4. Método de muestreo........................................................................ 30. 3.2.5. Cadena de salida de la IMU ............................................................ 31. 3.2.6. Cadena de salida del GPS .............................................................. 32.
(11) viii 3.3. Sistema de navegación integrado........................................................... 33. 3.4. Tiempo de adquisición de datos ............................................................. 35. 3.5. Análisis económico ................................................................................. 37. 3.6. Conclusiones del capítulo ....................................................................... 39. CONCLUSIONES Y RECOMENDACIONES ........................................................ 41 Conclusiones ..................................................................................................... 41 Recomendaciones............................................................................................. 41 REFERENCIAS BIBLIOGRÁFICAS...................................................................... 43 ANEXOS ............................................................................................................... 46.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN Desde el principio de los tiempos, el hombre ha utilizado su ingenio para crear vida artificial. Se ha empeñado en dar vida a seres artificiales que le acompañen en su morada, seres que realicen sus tareas repetitivas, tareas pesadas o difíciles de realizar por un ser humano, con el fin de aumentar su eficiencia y disminuir el costo y los peligros que implica la realización de las mismas. Desde la Revolución Industrial, hasta la invención de los automóviles, barcos y aviones, la visión del hombre ha sido ahorrar tiempo y esfuerzo. En la actualidad, donde la tecnología es cada vez más avanzada, la misión tecnológica. se. ha. enfocado. generalmente. en. el. perfeccionamiento. y. automatización de procesos donde se ven inmiscuidos muchos operarios o donde los factores de riesgo para la vida humana son muy altos. La ingeniería de control ha tenido la vanguardia en estos adelantos, ya que es la encargada de encontrar las soluciones a este tipo de problemas utilizando tecnología de punta y logrando, en ciertos casos, la creación de sistemas autónomos capaces de hacer operaciones complicadas, tan satisfactoriamente como el hombre. El calificativo “autónomo” hace referencia a la capacidad de percibir, modelar, planificar y actuar para alcanzar los objetivos sin la intervención, o con una intervención muy pequeña, de supervisores humanos. Esto delimita la frontera entre los vehículos autónomos y los vehículos o máquinas teleoperadas, donde un operador humano realiza de forma remota las tareas anteriores (Martínez, 2005). Los vehículos autónomos se caracterizan por su capacidad de desplazarse de forma autónoma en un entorno desconocido o conocido sólo parcialmente. Sus aplicaciones cubren una gran variedad de campos, entre los cuales se incluyen trabajos subterráneos (minería, construcción de túneles, etc.), tareas submarinas.
(13) INTRODUCCIÓN. 2. (inspección de oleoductos, mediciones, misiones de búsqueda y rescate, etc.), misiones. espaciales. y. exploración. planetaria. (recogida. de. muestras,. mantenimiento de estaciones orbitales, etc.), vigilancia e intervención de seguridad (desactivación de explosivos, operación en zonas radioactivas, etc.), aplicaciones militares, y otros muchos. En todas estas aplicaciones la justificación más importante para la aplicación de los mismos es la dificultad o imposibilidad de intervención humana, bien sea directa o teleoperada (Desa et al., 2006). Los vehículos subacuáticos han tenido un gran avance en los últimos años como una herramienta para la exploración submarina y la navegación. Desde el punto de vista del control, la naturaleza no lineal del robot subacuático, junto con las incertidumbres en los coeficientes hidrodinámicos, hacen que los vehículos submarinos sean un desafío de control. Son varias las líneas de investigación abiertas en este campo, donde se han construido diversos tipos de robots (Aranda et al., 2005) El mundo moderno cuenta ya con cierto desarrollo en cuestiones relacionadas con estas tecnologías, y posee avances notables en el campo del hardware y el software, que permiten que los vehículos submarinos autónomos cumplan numerosas funciones en la vida diaria, sin embargo, estas tecnologías resultan sumamente caras para nuestro país. Los científicos e investigadores se ven ante la necesidad de encontrar una solución capaz de suplir esta carencia y que sea económicamente factible. En este proyecto se pretende realizar el diseño de la arquitectura de hardware para un Vehículo Submarino Autónomo (AUV Autonomous Underwater Vehicles nomenclatura internacional adoptada), que pueda ser empleado para el reconocimiento subacuático, con el fin de realizar estudios marinos. Para ello se cuenta con una infraestructura en la cual se montará la arquitectura y el control del vehículo..
(14) INTRODUCCIÓN. 3. El objetivo general de este trabajo es desarrollar una propuesta de arquitectura de hardware para un AUV, así como la selección y el análisis de los sensores a utilizar. Una vez concluido este proyecto la arquitectura deberá ser lo suficientemente flexible como para aceptar pequeñas modificaciones en función de la aplicación.. Organización del informe El trabajo se estructura en tres capítulos que abordaran los siguientes temas: Capítulo 1: En este capítulo se fundamenta el marco teórico de la tesis, para ello se realizó una breve reseña histórica sobre la evolución de los AUV, su definición así como la amplia gama de aplicaciones que estos tienen en la sociedad. Se trataron además sus ventajas y desventajas, a la vez que se abordaron trabajos relacionados con el tema, terminado con una breve comparación entre ellos. Capitulo 2: Se define la arquitectura general del hardware basada en las necesidades que debe cumplir este vehículo, conjuntamente se seleccionan los sensores y se realiza el criterio de selección de cada uno de ellos, finalizando con la arquitectura propuesta. Capitulo 3: Comienza planteando un descripción de la arquitectura de hardware así como de los elementos que componen la misma, se exponen la características de los principales sensores, además se propone un método para mejorar las deficiencias entre ellos, concluyendo con un. análisis sobre los tiempos de. adquisición de datos y el estado económico del proyecto..
(15) CAPÍTULO 1 MARCO TEORICO. 4. CAPITULO 1 MARCO TEÓRICO Los océanos suponen un 70 por ciento de la superficie del planeta, en los que se encuentran gran parte de las reservas ecológicas del mundo, ecosistemas y una gran diversidad animal. Además es una gran fuente de fenómenos desconocidos por el hombre. Desde la antigüedad los científicos han tenido el afán de conocer y revelar cada uno de estos misterios con diversos fines, por lo que han tenido que enfrentar grandes desafíos para lograrlo. En la actualidad, el desarrollo alcanzado y las nuevas tecnologías, han permitido la utilización de dispositivos capaces de realizar diversas tareas, evitando el riesgo y el alto costo que puede implicar la realización de las mismas. Desde los últimos años, los AUV se han convertido en una herramienta novedosa. para los. investigadores, ya que estos tienen aplicaciones en diferentes esferas tanto investigativas como civiles y militares que van desde los buques de investigación científica a los torpedos inteligentes. Además, las aplicaciones de los AUV en el medio ambiente son igualmente fascinantes y complejas (Desa et al., 2006). Aunque de cierta forma el concepto de AUV parece ser algo novedoso, no es totalmente nuevo. El desarrollo de estos vehículos ha sido una tarea científico técnica desarrollada por múltiples universidades, centros de investigación y producción de todo el mundo en los últimos años (Blidberg, 2001). En este trabajo se analizan los AUV, sus características fundamentales, ventajas, desventajas, aplicaciones principales y se realiza una revisión bibliográfica sobre el estado de las investigaciones de esta temática a nivel mundial..
(16) CAPÍTULO 1 MARCO TEORICO. 5. 1.1 Antecedentes y motivaciones personales. Haciendo un recuento histórico podemos resumir que el hombre ha empleado los sumergibles para llevar a cabo una serie de tareas de diferentes índoles, el desarrollo de estos submarinos trajo consigo la aparición de los torpedos que son realmente los primeros Vehículos Submarinos no Tripulados (UUV por sus siglas en ingles). Se puede decir que el desarrollo de los AUV comenzó en la década de los 60 con vehículos como el Rebikoff Sea Spook construido por la Universidad de Washington. A éste le siguieron otros como el Skat del Shirshov Institue of Oceanology (Rusia), o el OSR-V japonés. Hoy en día hay una gran diversidad de robots submarinos. La función de estos primeros vehículos sumergibles, era meramente una herramienta para exploraciones subacuáticas, la evolución de los primeros sumergibles vendría de la mano del avance de la tecnología y del devenir de los incesantes acontecimientos bélicos que convertirían esta ingeniosa invención en un arma bélica (Fossen, 1995, Jaffe, 2001, Nakamura and Savant, 2002). Dos eventos durante el verano de 1985 provocaron el incremento por el interés de los vehículos submarinos. El primero, un avión de la Air Indian se estrelló en el Océano Atlántico cerca de las costas de Irlanda y un vehículo submarino guiado remotamente, normalmente utilizado para el tendido de cable, fue empleado para encontrar y recobrar la caja negra del avión. El segundo fue el descubrimiento del casco del Titanic en el fondo del océano donde había permanecido después del choque con un iceberg en 1912, cuatro kilómetros debajo de la superficie, un vehículo submarino fue utilizado para encontrar, explorar y filmar el hallazgo (Calvo, 2004) Este proyecto es realizado por el grupo de automatización robótica y percepción (GARP) de la Universidad Central “Marta Abreu” de Las Villas a solicitud del.
(17) CAPÍTULO 1 MARCO TEORICO. 6. CIDNAV y tiene como fin plantear una propuesta de arquitectura de hardware, para un AUV. El mismo debe ser capaz de navegar de forma autónoma en las misiones que le son encomendadas, tomar la información necesaria y transmitirla a tierra. La idea es conseguir información de forma rápida, mediante la utilización de los AUV, con un bajo nivel de riesgo personal. Este proyecto tiene una duración de un año aproximadamente y posee varios puntos de contacto con la ingeniería automática. La realización de este trabajo ha sido de gran motivación para mí, porque me ha permitido poner en práctica los conocimientos adquiridos durante mis estudios y me ha generado un gran interés en el desarrollo de este tipo de tecnologías, que son tan útiles y novedosas.. 1.2 Definición de Vehículo Submarino Autónomo. Los Vehículos Submarinos Autónomos son vehículos motorizados que se trasladan en un medio acuático y realizan diferentes misiones sin llevar a bordo operadores humanos. Su capacidad de navegación autónoma le permite ser programados con anticipación. Además pueden ser dirigidos por controladores u operadores ubicados en estaciones para su monitoreo. Los AUV forman parte de un gran grupo de robot submarinos conocidos como Vehículos Submarinos no Tripulados (UUV) en los que se incluyen también los Vehículos Submarinos Operados Remotamente (ROV) (Blidberg, 2001, Batlle et al., 2004, Jaffe, 2001).. 1.3 Aplicaciones de los AUV. Hay que considerar que la robótica submarina es un campo de gran interés por el potencial de aplicaciones que tiene (Aranda et al., 2005)..
(18) CAPÍTULO 1 MARCO TEORICO. 7. Con el desarrollo alcanzado hasta nuestros días, los AUV se han convertido en una herramienta poderosa para un sin números de aplicaciones en diferentes esferas, investigativas, comerciales y militares. La siguiente lista (Batlle et al., 2004) muestra un conjunto de aplicaciones en distintos campos y que podemos agrupar en las siguientes esferas.. Ciencia 9 Inspección del fondo marino. 9 Respuesta rápida a sucesos oceánicos o geotérmicos. 9 Estudios geológicos. 9 Estudios de la biología marina. 9 Fotografía submarina y video grabación.. Entorno 9 Monitorización a largo plazo de la vegetación y animales subacuáticos. 9 Recuperación del ecosistema marino. 9 Investigaciones ambientales e hidrográficas.. Industria 9 Inspección de cascos de buques y tanques. 9 Comunicaciones submarinas, instalación e inspección de cables. 9 Inspección en piscinas de refrigeración en plantas nucleares. 9 Construcción y mantenimiento de estructuras submarinas. 9 Vigilancia subacuática de los bancos de peces. 9 Inspección de estructuras submarinas (oleoductos, diques, puertos). 9 Inspección y evaluación de los recursos oceánicos. 9 Mapeo con precisión del fondo oceánico para proyectos de cable y tubería submarina..
(19) CAPÍTULO 1 MARCO TEORICO. 8. Civil 9 Rescates. 9 Paseos de entretenimiento. 9 Arqueología subacuática. 9 Monitoreo de huracanes. 9 Militar 9 Poner y quitar minas marinas a poca profundidad. 9 Misiones clandestinas. 9 Sensores submarinos no embarcados. 9 Evaluaciones de Sonar Naval.. 1.4 Ventajas y desventajas de los AUV En los AUV están presentes una serie ventajas y desventajas que deben ser tratadas a la hora de hacer un análisis de los mismos. En esta sesión se hará referencia a algunas de estas ventajas, además de hacer una breve comparación con los ROV, con el objetivo de demostrar los beneficios del uso de los AUV, pese a que poseen la dificultad de que un fallo en su complejo mecanismo puede ocasionar la pérdida de la estructura completa.. 1.4.1 Ventajas de los AUV Hoy día los AUV brindan nuevas ventajas para la sociedad al convertirse en una de las herramientas más potentes para múltiples aplicaciones submarinas. La independencia que poseen con respecto al hombre les permite disminuir el riesgo de error humano y la perdida de vida del mismo en las misiones que le son encomendadas..
(20) CAPÍTULO 1 MARCO TEORICO. 9. Eliminando los sistemas de control e instrumentos relacionados con la persona a bordo, asientos, sistemas de oxígeno y presurización, el tamaño y por tanto el peso de los vehículos estaría establecido únicamente por los equipos necesarios para la misión, logrando submarinos más pequeños y con menor demanda de potencia. Por ejemplo los gliders o planeadores de IMEDEA tienen un peso y tamaño reducido, pesan alrededor de 50 Kg. en el aire y tiene un peso aparente de 200 g en el agua, se trasladan a una velocidad entre 20 y 40 cm. por segundos en horizontal y entre 10 y 20 cm. por segundo en vertical y miden unos 2 metros (Tintoré, 2006) Un submarino más pequeño y de menor peso puede realizar maniobras subacuáticas con una mayor precisión. Podrá también penetrar en aguas poco profundas con menos probabilidad de colisionar. Otro elemento a considerar es que, no precisa de transporte especializado ya que es muy fácil de trasladar de un lugar a otro.. 1.4.2 Ventajas de los AUV con respecto a los ROV Los ROV, son robots manejados desde plataformas o embarcaciones, unidos a ellas mediante un cable, un pesado "cordón umbilical". En la actualidad, los ROV son utilizados en diversos sectores, investigativos, sociales, económicos y demás (Ray et al., 2003). Hoy dicha tecnología tiene fundamentalmente dos desventajas: El deficitario control del robot debido al propio cable que lo une a la embarcación y el costo que este tipo de operaciones lleva aparejado. Fletar una de estas embarcaciones con su tripulación y el equipamiento logístico para el manejo del vehículo puede alcanzar la cifra de 10.000 euros/día. Además, posee baja velocidad de inspección, debido al difícil control de sus movimientos por el cable que lo une a la.
(21) CAPÍTULO 1 MARCO TEORICO. 10. superficie e incapacidad de los operarios para detectar los objetos. Estas características van empeorando cuando las inspecciones deben ser hechas a mayor profundidad (Calvo, 2004). En contraste con esta realidad, los AUV permiten una navegación más suave y cercana al objetivo de estudio, incrementan la velocidad de inspección debido fundamentalmente a que no necesitan un cable que los una a embarcación alguna en la superficie. De este modo, al consumir menor tiempo y al requerir menor apoyo logístico de superficie, las misiones son mucho más precisas y económicas (Acosta, 2005).. 1.5 Innovación A medida que la ciencia evoluciona, aquello que antes solo era posible mediante técnicas y presupuestos militares, hoy es factible con materiales y tecnologías disponibles en el mercado a precios altamente competitivos. Aunque, en la práctica, en nuestro país no contamos con ningún AUV, el hecho es que a estas alturas del desarrollo tecnológico, el implementar un sistema de guiado no tripulado no supone una innovación en si. La documentación existente sobre este tema es abundante. Sin embargo, es evidente que en el desarrollo de los AUV queda mucho por trabajar, sobre todo en los siguientes aspectos: 9 Creación de una metodología para su diseño. 9 Disminución de trabajo de las estaciones de supervisión y control. 9 Diseñar un sistema que tolere fallas..
(22) CAPÍTULO 1 MARCO TEORICO. 11. 9 Diseñar sistemas empotrados que permitan mayor sencillez en la gestión de la misión.. 1.6 Trabajos relacionados Entre los objetivos que nos ocupan, esta el análisis de otras arquitecturas planteadas por algunos fabricantes e investigadores. En el siguiente epígrafe abordaremos algunos de los proyectos que se han desarrollado en el mundo acerca de este tipo de vehículos.. 1.6.1 Vehículo Submarino Autónomo SAUCISSE Este proyecto fue desarrollado por un grupo de estudiantes en conjunto con sus profesores de la escuela de ingeniería francesa ENSIETA, con el fin de lograr un prototipo de AUV capaz de situarse en una piscina y localizar diversos objetos. En este robot se ponen a prueba una serie de tecnologías, una. arquitectura. mecánicas basadas en un tubo, cuatro propulsores y una arquitectura electrónica reducida a componentes ya existentes (Bazeille et al., 2007). Este robot se utiliza como base para muchos temas de investigación, en particular, en la localización de objetos de forma dinámica en una piscina y el reconocimiento de objetos en un medio subacuático.. Estructura Electrónica El AUV tiene como propósito poder localizar objetos de diferentes formas y colores dentro de una piscina por lo que esta equipado por los siguientes sensores:.
(23) CAPÍTULO 1 MARCO TEORICO. 12. 9 Barómetro (hace posible estimar la profundidad) 9 Sonar y Unidad de Control (permite localizar el robot por una comparación con el borde de la piscina) 9 Dos Webcam (una dirigida hacia abajo y la otra hacia delante ) Todos estos varios sensores, están conectados en conjunto a una Motherboard, la cual debe ser lo suficientemente poderosa para realizar el procesamiento de imágenes y la localización. Los propulsores son controlados por un modulo de Labjack conectado USB a la Motherboard.. Fig.1.1 Arquitectura Electrónica del AUV SAUCISSE (Bazeille et al., 2007).. 1.6.2 Vehículo Submarino Autónomo STARFISH En el Laboratorio de Investigación Acústica (ARL) de la Universidad Nacional de Singapur (NUS), se desarrolló un AUV llamado “STARFISH”. Este vehículo es un pequeño torpedo, que posee en su forma básica una longitud de 1.7 m pero la longitud final puede variar, y su diámetro alcanza los 0.2 m. En este proyecto se plantea una arquitectura modular abierta para el AUV, se trata de una arquitectura de hardware multisección que ha sido diseñada para lograr un interfaz común electro-mecánico entre las cuatro secciones que posee, de este modo.
(24) CAPÍTULO 1 MARCO TEORICO. 13. proporcionando una capacidad plug and play entre ellas. Esta arquitectura se ha puesto en práctica utilizando una combinación de micro-controladores y una sola motherboard con comunicación Ethernet. El AUV utiliza cuatro aletas de control conducidas por los servomotores para la orientación del ladeo, cabeceo, guiñada y el control de la profundidad. Para la detección de obstáculos se emplea un Forwared Looking Sonar (FLS). El AUV también lleva una serie de sensores de posicionamiento que incluyen un altímetro y un sensor de profundidad. Con el fin de la navegación, presenta una unidad de movimiento inercial (IMU), una brújula, y un receptor GPS (Sangekar et al., 2008). En este proyecto se describe una arquitectura flexible que brinda la posibilidad de seleccionar el equipamiento necesario para las misiones. Para ello se divide la arquitectura en 4 secciones independientes pero con buena integración entre ellas.. 1.6.3 Comparación entre las arquitecturas expuestas Sobre el tema de los AUV, existen hoy día un sin número de investigaciones, que van desde los casos mas simples dedicados a una sola aplicación hasta los mas complejo de arquitecturas flexibles, para tener una idea de que se está haciendo actualmente en el mundo se sugiere visitar la pagina web Autonomous Underwater Vehicle disponible en http://www.transit-port.net/Lists/AUVs.Org.html. En este caso trataremos una breve comparación entre dos arquitecturas que cumplen con estas características. La primera es una arquitectura simple que debe ser capaz de controlar la navegación del vehículo dentro de una piscina y localizar un conjunto de objetos en la misma. Este prototipo brinda un sistema sencillo, con facilidad de.
(25) CAPÍTULO 1 MARCO TEORICO. 14. mantenimiento, menor probabilidad de rotura, esta diseñado con componentes fáciles de adquirir en le mercado a costos moderados y para esta aplicación ofrece la fiabilidad y la robustez requerida. Pero no podrá realizar alguna otra misión que implique un cambio de configuración. Sin embargo la segunda arquitectura esta estructurada de forma configurable logrando una integrar sus componentes. Esto posibilita ampliar su gana de aplicaciones, pero trae consigo la complejidad de sistema, aumentando los costos y vulnerabilidad del equipo..
(26) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 15. CAPITULO 2 ARQUITECTURA DE HARDWARE. Para la selección del equipamiento necesario empleado en la arquitectura de hardware del AUV, se plantea una arquitectura general teniendo en cuenta las necesidades a cumplir por este prototipo, además de se analizaron las propuestas de varios desarrolladores a nivel mundial y se seleccionó cada elemento teniendo en cuenta la fiabilidad y el costo de los mismo. Además se tratan algunos conceptos importantes a tener en cuenta a la hora de la selección de los sensores y se concluye planteando la arquitectura del vehículo.. 2.1 Arquitectura general de hardware Para la realización de este proyecto, fue necesario primeramente plantear una estructura general de hardware, analizando las necesidades y tareas a cumplir por este prototipo.. 2.1.1 Necesidades que debe cumplir el hardware del vehículo Este prototipo debe ser capaz de realizar una serie de misiones de forma autónoma, bajo la supervisión del hombre. Además dichas misiones podrán ser reprogramadas sobre la marcha. Para ello el vehículo debe ser capaz de: 9 Detectar los cambios en su trayectoria provocados por perturbaciones externas al sistema y corregir las mismas. 9 Detectar los objetos u obstáculos que aparezcan en su trayectoria definida para procesar dicha información de acuerdo al propósito deseado..
(27) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 16. 9 Entregar la posición en la cual se encuentra con la mayor precisión posible, teniendo en cuenta la profundidad y la altura sobre el nivel del fondo oceánico. 9 Procesar en tiempo real los datos adquiridos durante las misiones para lograr un mando y control autónomo 9 Lograr la comunicación con la estación de supervisión y control.. 2.1.2 Estructura general Para lograr una estructura general se dividieron las necesidades y tareas de este prototipo en sistemas con aplicaciones específicas. Estos sistemas deben interactuar entre si logrando un vehículo con autonomía y desempeño satisfactorio.. Fig.2.1 Arquitectura General de Hardware.
(28) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 17. Sistemas de la estructura general. 9 Sistema de navegación. 9 Sistema de detección de obstáculos. 9 Sistema de estado. 9 Sistema de cómputo. 9 Sistema de comunicación.. 2.2 Sistema de navegación. El sistema de navegación brinda un mapa digitalizado y un indicador permanente de la situación del vehículo(Marco and Healey, 2000).. 2.2.1 Sistema de posicionamiento. El primer elemento, la fuente de la navegación fiable, esta dada en lograr una estimación precisa del posicionamiento, lo que es uno de los factores más complejos. ¿Cómo se ha abordado esta necesidad en los vehículos autónomos actualmente empleados? En la categoría de estimación explícita de posición se consideran todos aquellos sistemas capaces de estimar la posición del vehículo sin que ello exija una interpretación del entorno. Dentro de los sistemas de estimación explícita pueden distinguirse dos grupos: estimación basada en medidas internas, y estimación basada en estaciones de transmisión. Los primeros trabajan exclusivamente con sensores integrados en el vehículo como codificadores, giróscopos, brújulas, acelerómetros, tacómetros, etc., y sin ningún tipo de información exterior. Los segundos, por el contrario, están configurados en base a dos unidades bien.
(29) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 18. diferenciadas. Por un lado, la unidad montada sobre el vehículo y, por otro, la unidad o unidades externas que necesitan ser emplazadas en posiciones conocidas del entorno. Generalmente, la unidad montada sobre el vehículo actúa como sensor receptor, mientras que las externas actúan como emisores o señales de referencias.. 2.2.2 Sistemas de navegación inercial. Los Sistemas de Navegación Inercial (INS) se basan en el principio de inercia y en la relación existente entre las aceleraciones y la posición. La primera integración de las aceleraciones proporciona la velocidad y la segunda la posición. Se usan acelerómetros y giroscopios para medir los cambios de velocidad y dirección. Conociendo la posición inicial de partida, se puede determinar la posición relativa (Farrell, 1998). Los INS presentan la ventaja de que son independientes del exterior; son autocontenidos, no se pueden interferir y por eso se han usado para el guiado de misiles y torpedos, así como de referencia auxiliar para misiles, buques y aviones de guerra. El principal inconveniente es que el error es acumulativo por lo que las prestaciones del sistema empeoran a medida que pasa el tiempo. A diferencia de los sistemas odométricos (Sleeswyk, 1981) que son empleados principalmente en vehículos terrestres, los sistemas de navegación inercial no se ven afectados por los problemas derivados de ondulaciones e irregularidades del terreno. Esto hace que, en la práctica, sean mucho más fiables y precisos que los sistemas basados en odometría, aunque como contrapartida, son más frágiles y caros que estos..
(30) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 19. 2.2.3 Unidad de movimiento inercial. La unidad de movimiento inercial es el sensor principal para el sistema de navegación del vehículo submarino autónomo. Compuesta por acelerómetros y giróscopos, que estiman la posición y orientación del vehículo empleando medidas de las aceleraciones y ángulos de orientación. Los acelerómetros están basados en sistemas MEMS (Micro-Electro-Mechanical Systems) (Semiconductor, 2008). La precisión del acelerómetro resulta crítica, ya que, debido a la doble integración de las aceleraciones (de estas integraciones se obtiene velocidad y posición), incluso pequeños errores cometidos por éste repercuten notablemente en la posición estimada. Nótese que en numerosos robots móviles las aceleraciones son pequeñas con lo que la relación señal/ruido es también pequeña lo que complica la estimación.. 2.2.4 Sistema de posicionamiento global. El sistema de posicionamiento global (GPS por sus siglas en ingles) es un sistema capaz de brindar información precisa sobre el estado de un objeto, dada en latitud, longitud y altura. El sistema está compuesto básicamente por satélites que emiten señales utilizadas por los receptores GPS para calcular Ia posición del receptor. Cada satélite envía hacia Ia Tierra una onda de radio que transporta secuencias de números llamados códigos, el C/A (Coarse /Acquisition) y el P (Precise). El código C/A es accesible a todos los usuarios y se modula sobre Ia portadora L1. En cambio el código P, se genera en forma similar y modula sobre las portadoras L1 y L2. Además de estos dos códigos el satélite envía un mensaje con: información del sistema, almanaque, estado de los satélites, etc (Forssell, 1991, Getting, 1993, Kaplan, 1996)..
(31) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 20. Cada satélite tiene un único código P y CA, de manera que cada receptor puede tener Ia diferencia entre señales enviadas por diferentes satélites. Por tanto, los receptores son capaces de identificar el origen de las señales recibidas. El código P se repite una vez cada siete días, en cambio el código CA se repite en pulsos de microsegundos. El código P con su valor de modulación es el que proporciona un mayor grado de precisión a los receptores (<1 metro), siendo un buen por ciento de los receptores incapaces de entenderlo o de utilizarlo, los llamados de simple banda. A partir de estos códigos se determinan las distancias a los satélites y se puede calcular la posición del receptor mediante triangulación; este método propio del sistema GPS.. 2.2.5 Selección del equipamiento. Para la navegación y la realización de las maniobras que se desea que realice este equipo, es indispensable el uso de una IMU, este tipo de sensor es usado con mucha frecuencia en otros proyectos similares (Bazeille et al., 2007, Ray et al., 2003) . La IMU es la encargada. de estimar, la posición y orientación del vehículo,. detectando las variaciones en las magnitudes de los giros que realiza el submarino y entregando las mediciones para efectuar las correcciones necesarias por el sistema de control, logrando mantener la trayectoria deseada. Durante la navegación en la superficie se emplea un GPS, mediante un mástil acoplado al vehículo, que posee una antena a través de la cual el GPS puede corregir la posición del AUV y obtener el grado de exactitud de la navegación (Sangekar et al., 2008)..
(32) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 21. Con el fin de cumplir con estas necesidades se seleccionó la IMU módelo MTi-G la cual tiene incluido el GPS.. MTi-G Esta unidad de movimiento inercial fue fabricada por Xsens Technologies B.V. cuyo modelo es MTi-G. Como se había planteado anteriormente, es el sensor principal del sistema de navegación. Posee un sistema de referencia de actitud y rumbo (AHRS). Este sensor es una combinación de IMU, GPS y barómetro, el cual contiene acelerómetros, giroscopios, magnetómetros en 3D, un receptor integrado GPS, un sensor de presión estática y un sensor de temperatura. Es una excelente unidad de medición para la estabilización y el control de vehículos, incluso durante situaciones de grandes aceleraciones.. 2.3 Sistema de detección de obstáculos. Para lograr que el AUV detecte su objetivo o evitar que colisione con algún obstáculo que se encuentre en una trayectoria desconocida, tales como boyas, barcos o riscos, se utiliza un Forward Looking Sonar (FLS) (Altshuler et al., 2001, Sangekar et al., 2008).. 2.3.1 Forward Looking Sonar (Color Twinscope). El Forward Looking Sonar usa una tecnología acústica de arreglo de fase, conocida también como tecnología ultrasónica de arreglo de fase. Su capacidad ha sido utilizada tanto en la industria bélica como en la medicina durante muchos años, ya que esta tecnología muestra imágenes muy definidas..
(33) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 22. El arreglo de fase esta compuesto por un grupo de elementos piezoeléctricos de cerámica. Cada elemento puede enviar y recibir pulsos acústicos. Cuando todos los elementos en le arreglo están enviando o recibiendo energía acústica al mismo tiempo, todo el conjunto se comporta como un único elemento de mayor tamaño con una diferencia importante: la capacidad de el arreglo concentrar energia acústica en diferentes direcciones, depende de los deferentes ajustes de fase de la señal aplicada o recibida por cada elemento. Dependiendo en le arreglo de fase de la señal, el rayo acústico puede estar dirigido en casi un número ilimitado de direcciones. Durante la operación se convierte una pequeña cantidad de corriente eléctrica de la batería en pulsos de sonido ultrasónico, que son alimentados al arreglo de fase del transductor. Estos pulsos acústicos viajan desde le transductor en un patrón en forma de cono, llamado el ángulo de cono. Cuando el pulso de sonido intercepta un objeto bajo el agua, este es reflejado hacia atrás (retorno de eco), recibido por el transductor y convertido de nuevo en un pequeño impulso eléctrico.. 2.4 Sistema de estado. El sistema de posición es el encargado de establecer con la mayor precisión posible el estado actual de vehículo, dígase profundidad y altura. Para ello se seleccionó el equipamiento necesario que cumpla con estos requisitos. Dado que este prototipo debe realizar un conjunto de maniobras bajo el agua, es necesario conocer la profundidad a la que se encuentra el AUV. Para ello se decidió usar un barómetro , el Hydrolab DS5, que permitirá medir la presión y estimar la profundidad a que se encuentra el equipo (Bizingre et al., 2004, Bazeille et al., 2007)..
(34) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 23. El uso de un dispositivo que permita medir la distancia que hay entre el submarino y el fondo del mar hace posible evitar colisiones durante las maniobras que incluyan el descenso a bajas profundidades del AUV. Para resolver esta problemática se puede utilizar un altímetro diseñado para estos fines. Los más comunes para este tipo de aplicaciones son los ultrasónicos, esto implica la colocación de uno de estos elementos en la parte inferior del vehículo apuntando hacia abajo para poder mantener una referencia con respecto al fondo (Altshuler et al., 2001, Myers et al., 2005), pero como ya estamos utilizando un sonar FLS de amplio barrido, capaz de cubrir 90 grados de barrido , se determino aprovechar lo beneficios del mismo. Las características de este sensor fueron abordadas en el epígrafe 2.3.. 2.5 Sistema de cómputo Para lograr una correcta operación del vehículo, es necesario la selección de un elemento de cómputo capaz de comunicarse con los distintos sensores para reunir sus datos y mediante un software de control procesarlos y mantener la operación de navegación autónoma siguiendo las tareas programadas. En el mundo de los ordenadores se han realizado grandes avances que han mejorado su potencia y capacidad de cálculo, pero para esta aplicación, la PC además de mantener unas elevadas prestaciones, debe cumplir con criterios tales como: las posibilidades para la comunicación serie mediante el protocolo RS-232 el cual es muy usado por los sensores antes descritos, debe presentar resistencia a vibraciones y poseer canales PWM para ejercer el mando sobre los servos motores que se encuentran en el submarino para el control del mismo, además requiere alta integración de prestaciones. y. puertos. de. comunicación,. soporte. para. dispositivos. de. almacenamiento masivo no electromecánicos y posibilidad de buses de expansión..
(35) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 24. A todos estos criterios de hardware se suma el hecho de que debe ser capaz de correr en un sistema operativo de tiempo real y la aplicación en la cual se rige el control, mando y comunicación del vehículo, manteniendo las condiciones de HRT (hard real time), dígase la capacidad de atender las distintas necesidades de tiempo de muestreo que presentan lo sensores manteniendo los algoritmos de control utilizados. Este elemento tiene especial significación debido a que de su correcta selección, trae consigo la posibilidad de ampliar el rango de aplicaciones y la posibilidad en el futuro de añadir nuevas prestaciones. Por las razones antes expuestas se propone una PC/104 la cual es usada también por otros fabricantes de vehículos submarinos autónomos (Myers et al., 2005, Sangekar et al., 2008).. 2.6 Sistema de comunicación Para casi cualquier tipo de aplicación e inclusive para un respaldo de control se hace necesario un enlace de comunicaciones que permita a distancia enlazarse con el vehículo ya sea para dar órdenes o descargar información sensada por el mismo. Para garantizar la comunicación con el submarino bajo el agua hoy día la mayoría de los fabricantes coinciden con el empleo de un modem acústico (Marques et al., 2007, Altshuler et al., 2001, Anilesh et al., 2007). Aunque en nuestro proyecto no emplearemos este por las razones siguientes: 9 Serias limitaciones en cuanto al alcance y la velocidad de transferencia de datos..
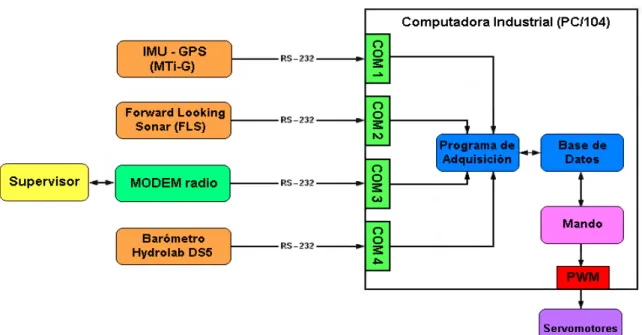
(36) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 25. 9 No se podría operar en áreas cercanas a la costa. 9 Posee alto costo. Como la relación costo beneficio que brinda el modem acústico para esta aplicación, no es buena se selecciono, un sistema de comunicación por medios inalámbricos, siendo las opciones: los sistemas de LAN inalámbricos o el MODEM–Radio. Debido a que este proyecto requiere una comunicación de largo alcance y el volumen de datos a transmitir no es muy elevado, se decidió tomar el MODEM–Radio ya que este cumple con las exigencias que se requieren logrando un menor costo (Sangekar et al., 2008, Bazeille et al., 2007, Bizingre et al., 2004). Es de destacar que esta selección tiene como limitante que el vehículo solo se puede comunicar cuando está en la superficie.. 2.7 Arquitectura de hardware. Figura 2.2.Arquitectura de Hardware..
(37) CAPÍTULO 2 ARQUITECTURA DE HARDWARE. 26. El sistema debe quedar estructurado como se muestra en la figura 2.2. La arquitectura en su conjunto debe estar contenida físicamente dentro de un container a prueba de impactos y condiciones ambientales desfavorables. Dicho container se fijará al AUV mediante soportes antivibración..
(38) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 27. CAPITULO 3 OPERACIÓN DE SISTEMA. Para que la arquitectura de hardware logre satisfacer el conjunto de requisitos que requiere la aplicación, no solo depende de la correcta selección de sensores, sino también de una eficiente operación de sistema.. los. En este capítulo. se tratará primeramente sobre como esta estructurada la arquitectura planteada en el capitulo anterior, así como las características de los principales sensores que forman parte de sistema de navegación, dado que es el sistemas que rige la estabilidad del vehículo. Con el objetivo de mejorar las deficiencias que puede presentar la navegación, se propone la utilización del filtro de Kalman como método de integración multisensorial. Además se realiza un análisis de los tiempos de adquisición de datos y estado económico del proyecto.. 3.1 Descripción de la arquitectura de hardware Esta arquitectura de hardware, la cual se diseño durante la realización de este proyecto, consta de tres sensores digitales, la MTi-G, el Forward Looking Sonar y el Hydrolab DS5, los cuales emplean protocolo de comunicación RS-232, lo que permite la conexión a la unidad de procesamiento mediante los puertos serie que posea la misma. La comunicación con la estación en tierra se establecerá mediante un modem radio, que es el encargado de enviar información. para. alimentar la base de datos que usa el supervisor. El moden radio también servirá para recibir la información proveniente de tierra en la etapa de configuración del AUV. La unidad de procesamiento elegida por esta arquitectura es una PC/104, la cual es usada como sistema de guía y control del AUV. Esta unidad cuenta con 4 puertos serie empleados para la comunicación con los sensores. Además posee.
(39) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 28. una interfaz PWM, a través de la cual enlaza los servomotores para controlar el vehículo. La PC/104 empleada en este proyecto cumple varias funciones. La primera es la adquisición de datos que brindan los sensores conectados a ella, mediante el puerto serie. La segunda es la creación de una estructura donde son almacenados los datos obtenidos de los sensores y por último, esta unidad está encargada de ejercer los mandos sobre los actuadores, de acuerdo con la información que se encuentre en la base de datos.. 3.2 Características de la MTi-G. En este epígrafe se realiza un análisis sobre las características de la MTI-G como sensor principal del sistema de navegación. Este sensor fue fabricado por Xsens Technologies B.V. cuyo modelo es MTi-G. Para mayor información sobre el funcionamiento del mismo consúltese los manuales dados por el fabricante(Xsens, 2009).. 3.2.1 Calibración Este sensor, a diferencia de sensores anteriores de este mismo fabricante, posee un modo en el cual se entregan los datos calibrados. Solo necesita 500 ms de tiempo de establecimiento, mediante el cual toma los valores que está recibiendo y se calibra automáticamente de acuerdo a la variación de los mismos, durante este tiempo, los valores que se obtienen del sensor deben ser desechados. 3.2.2 Limitaciones Las limitaciones de la MTi-G están dadas por las deficiencias de cada uno de sus sensores , para lograr un mayor entendimiento se analizan los siguientes parámetros..
(40) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 3.2.2.1. 29. Limitaciones IMU. Existen pocas limitaciones para la IMU que pudieran influir en nuestro sistema, no obstante, estas. limitaciones pueden causar errores en las mediciones. A. continuación se mencionan las principales. Un problema a tener en cuenta son las vibraciones porque pueden afectar directamente a los acelerómetros. Esto ocurre por dos razones principales: La primera se refiere a que si la magnitud de la vibración es más larga que el rango del acelerómetro, puede suceder que el mismo se sature y tienda a los niveles cero del acelerómetro, lo cual causaría una estimación errónea del roll/pitch. La segunda posible causa es que si la frecuencia de vibración es más alta que el ancho de banda del acelerómetro, aunque en teoría deberían ser eliminadas estas vibraciones, en la práctica se mantienen ocasionando una subida de aliasing; especialmente si se trata de un ancho de banda limitado, esto puede observarse en bajas frecuencias de oscilación. Una forma de resolver este problema es aislar de las vibraciones a los sensores mediante un aislador. La tercera causa es el BIAS de la señal de los acelerómetros error acumulativo que debe ser filtrado. 3.2.2.2. Limitaciones GPS. Una de las principales limitaciones que posee este dispositivo es que necesita localizar al menos 4 satélites antes de comenzar a transmitir la posición 3D del sistema. En cuanto a la precisión podemos decir, que el error cometido durante la medición de la posición puede llegar a ser hasta de 4 metros y la precisión de la velocidad es de ±0.2 m/s. Es de destacar que este sensor brinda información a.
(41) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 30. una razón mucho más baja que la IMU, por lo que se hace necesario realizar procesos de sincronización de sus respectivas informaciones.. 3.2.3 Tiempo requerido para obtener los datos. La MTi-G puede ser ajustada para diferentes números de bps, dados por la frecuencia de muestreo y cantidad de datos que emplea para la comunicación; en este caso se ajustó el número de bits por segundo a 115200. Este ajuste fue hecho de acuerdo a las exigencias de obtener una muestra cada 40 ms (25 Hz). Este tiempo está dividido en dos principales intervalos: demora en la transmisión y tiempo de cálculo de los sensores. La demora en la transmisión está dada por el número de bps al cual está configurado el puerto, en este caso está configurado a 115200 bps y la demora es de 4.77 ms; a este número se le suma la demora del cálculo de los sensores, que en el peor caso sería de 6.84 ms. El tiempo total de demora en la obtención de datos es de 11.61 ms. Durante un tiempo de funcionamiento muy largo, es necesario usar un reloj para sincronizar dicho sensor al sistema, debido a que posee una precisión de tiempo de ± 0.3 μs/muestra.. 3.2.4 Método de muestreo La IMU puede ser ajustada en dos diferentes modos, el modo de muestreo continuo y modo de muestreo por petición. Usando la IMU en modo de muestreo por petición es necesario enviarle la orden para que prepare los datos, que después serán recibidos por el puerto serie; para el funcionamiento de dicho sensor en este modo se deben enviar las peticiones de datos cada cierto tiempo, de acuerdo con la frecuencia de muestreo definida. Esta tarea también puede ser realizada automáticamente por la IMU, por lo que se decidió configurarla al modo de muestreo continuo en el que se entregan los datos automáticamente sin.
(42) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 31. esperar una orden de preparar datos, de acuerdo con la frecuencia de muestreo que le fue definida durante el proceso de configuración.. 3.2.5 Cadena de salida de la IMU Cada una de las salidas que entrega la IMU, está compuesta por el siguiente formato:. Donde PRE es el preámbulo que indica el inicio de una cadena, este campo siempre contiene el valor de 250 (FA), BID es el identificador del bus, indica que la IMU está configurada en el modo de entrega de muestras continuas, usa como valor de dirección 255 (FF), el campo MID es el identificador de mensaje, contiene la información del tipo de mensaje que se está recibiendo del sensor, LEN da el número de datos en bytes del campo de datos, DATA es el campo en el cual se encuentran los datos, su longitud puede variar, y el CS es el campo de chequeo de suma permite verificar que el mensaje sea valido para ser procesado y no se hayan perdido datos, para elle se suman todos los bytes del mensaje y si el byte menos significativo es igual a cero, el mensaje es valido. Excepto el campo de datos, los demás campos ocupan 1 byte dentro de la cadena. La IMU puede entregar el campo de datos en diferentes formatos con o sin calibrar, en nuestro caso utilizaremos los datos calibrados. En el formato básico se obtienen las medidas de cada uno de los sensores incluidos dentro de la IMU, como son; la aceleración lineal, velocidad de giro dados por el giroscopio y el campo magnético en los tres ejes. A continuación se muestra el formato de salida del campo de datos para este caso:. Otro formato de salida de la IMU, que se considera importante resaltar en este trabajo, son los ángulos de Euler, cuyo formato se muestra a continuación:.
(43) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 32. Los campos anteriormente mencionados tienen un tamaño de 32 bits (cuatro bytes) dentro de la cadena, ya sean los campos de formato simple o de ángulos de Euler. La IMU emplea el protocolo IEEE-754 para convertir estos valores de número enteros en valores útiles de gran precisión, que pueden ser usados por el supervisor o el control. El modelo de unidad inercial que poseemos, permite configurar dicho sensor para obtener un híbrido de estos campos antes mencionados. En nuestro caso la IMU se configuró para que inicialmente entregara los ángulos de Euler, luego los campos de aceleración, giroscopio y magnético; por último se incluye el campo de temperatura del sensor. A continuación se muestra el formato elegido para nuestro proyecto.. La IMU también puede dar otros tipos de mensajes conocidos como código de error, los cuales ocupan 1 byte (dos números hexadecimales), que pueden ser usados por el programa para detectar cualquier problema en la comunicación o en la configuración de la misma y cada vez que se realiza una configuración para confirmar que no hubo errores, la IMU envía la misma cadena, pero con el campo del identificador incrementado en 1. Estos mensajes son conocidos como mensajes de reconocimiento (Ack).. 3.2.6 Cadena de salida del GPS La cadena de salida del GPS contiene en el campo de datos la latitud, longitud y altura que representa la posición en la cual se encuentra la antena conectada a la MTi-G, además de las velocidades en los tres ejes de coordenadas. Para nuestro proyecto utilizaremos solo las tres primeramente expuestas y despreciaremos los.
(44) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 33. datos de velocidad. El formato a utilizar para el campo de datos de salidas esta representado por:. Este campo posee una longitud de 32 bit aunque puede ser configurado para alta precisión a 48 bit.. 3.3 Sistema de navegación integrado. La necesidad de navegar con éxito en un medio subacuático se ha convertido en una importante preocupación de los investigadores desde la década de 1990 (Kwak, 2002). El desarrollo de un sistema de navegación integrado es usado en última instancia, cuando se requiere mejorar los resultados mediante la eliminación de las deficiencias relacionadas con los diferentes elementos del sistema, en este caso GPS, INS y Sonar. El GPS es susceptible bajo condiciones de alta dinámica y se limita en los casos de interrupción por satélite (Faruqi, 2004). Las señales del GPS no tienen efecto bajo agua y resultan, por tanto, de poco uso en un entorno subacuáticos. El INS sufre de la necesidad de una constante calibración debido a los problemas que se derivan en la IMU. La IMU es un dispositivo mecánico y, como tal, adolece de fallos de esta índole. Los errores de desalineación debido a la imperfección de la orientación de el INS es también una fuente de error de navegación (McPhail, 2003). El Sonar es susceptible a las variaciones en la velocidad del sonido bajo agua, el cual es importante para determinar el movimiento del vehículo (Jorgenson, 2004). Con la integración del GPS, INS y Sonar se fusionan las virtudes de cada sistema para un mejor funcionamiento. La integración del GPS / INS / SONAR se logra usando el filtro de Kalman. El filtro de Kalman es un estimador recursivo que produce una mínima estimación de la.
(45) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 34. covarianza de el vector estado (Kalman and Bucy, 1961, Faruqi, 2004). El filtro de Kalman es una buena elección de diseño, como el filtro debe ser robusto y debe responder a un número variable de mediciones externas. El modelo integrado GPS / INS / SONAR funciona de la siguiente manera: cuando el vehículo esté en la superficie, el sistema de navegación utiliza solo GPS / INS. Este sistema es modelado por 11 estados del filtro de Kalman. Los once estados cuentan los errores en la posición (x, y, z), la velocidad (x, y, z), la aceleración (x, y, z), el error del reloj y de la frecuencia de reloj del GPS. Cuando el vehículo está sumergido, el sistema de navegación utiliza INS / SONAR y es modelado usando 9 estados del filtro de Kalman. Los nueve estados presentan error de posición (x, y, z), de velocidad (x, y, z) y de aceleración (x, y, z). El filtro de Kalman es capaz de generar la estimación de los errores en la posición, la velocidad y aceleración que pueden ser utilizados para corregir el pleno estado nominal del sistema. Un modelo conceptual del sistema integrado se representa en la Figura 1.. Figura 3.1. Modelo conceptual (Bennamoun et al., 2009). A modo de resumen, la tecnología moderna ha hecho grandes mejoras en la mayoría de sistema de navegación con la inclusión del GPS/ INS /SONAR. Estos.
(46) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 35. sistemas se pueden utilizar de manera más eficiente utilizando una arquitectura integrada. El sistema integrado combina las virtudes de cada uno de los sistemas para obtener mejores resultados, menos errores y, por ende, mejorar la rendimiento. Se considera que un mayor desarrollo de sistemas integrados de GPS / INS / SONAR mejorará aún más el rendimiento y la robustez de los modelos de navegación submarinos.. 3.4 Tiempo de adquisición de datos. El tiempo de adquisición de datos es muy importante, pues estamos hablando de una aplicación en tiempo real, que necesita un flujo de datos continuo, para ejercer un buen control sobre el vehículo. Para la IMU-GPS, el tiempo de adquisición de datos, esta delimitado por la necesidad de acceder a uno de sus sensores. En el caso del GPS se ha podido comprobar que la posición del AUV no varía significativamente en el transcurso de 1 segundo, mientras que la IMU, a diferencia del GPS, requiere un mayor grado de actualización en sus valores, se ha demostrado que estos pueden variar notablemente en intervalos de tiempo muy pequeños, por lo que se decidió configurarla para una frecuencia de muestreo de 25 Hz. Debido a que nuestro prototipo se traslada a poca velocidad, la posición varia gradualmente por lo que en términos de 1 segundo no se producen cambios significativos en su estado. En el caso de la detección de obstáculos, la altura y la profundidad, no se ven afectadas en el transcurso de pequeños intervalos de tiempo. Por lo tanto no se hace necesario realizar un muestreo a mayor frecuencia sobre el sonar y el barómetro. Este sistema utiliza un MODEM digital para la comunicación con la estación en tierra, pero dicha estación no requiere un flujo continuo de datos, debido a que el procesamiento de los mismos es realizado por el mando dentro de la computadora.
(47) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 36. a bordo del vehículo. El supervisor solo se encarga de mostrar el estado actual del vehículo, pero no influye directamente sobre el control del AUV salvo en circunstancias de emergencia y control de alarmas. Además dicha comunicación se establecerá cuando el vehículo se encuentre en la superficie, por estas razones se decidió muestrearlo cada 5 segundos. Tanto el Modem como la IMU-GPS, el Sonar y el Barómetro usan protocolo RS232, por lo que necesitan un puerto serie cada uno para lograr la comunicación con la PC a bordo del vehículo. Como el sonar, el barómetro y el modem no requieren una alta tasa de actualización como ya se ha dicho anteriormente, se pudiera disminuir la cantidad de puertos requeridos multiplexado cada uno de los sensores en un solo puerto, no siendo así en el caso de la IMU, que requiere un puerto dedicado únicamente a la comunicación con la misma. En este caso no es necesario economizar los puertos ya que la PC seleccionada cuenta con cuatro puertos dedicado solo a dicha comunicación. Para plantear el ciclo de muestreo es necesario definir la frecuencia a la que se requiere muestrear cada elemento, además de determinar los tiempos de retardo de cada uno. A continuación se muestra una tabla con dicha información Tabla 3.1. Ciclo de Muestreo Elemento. Frecuencia de Muestreo. Tiempo de retardo. MTi-G. 25 Hz. 15 ms. Mando. 25 Hz. 15 ms. FLS. 1 Hz. 10 ms. Hydrolab DS5. 1 Hz. 10 ms. Modem. 0.2 Hz. 10 ms.
(48) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 37. Figura 3.2. Ciclo de muestreo.. 3.5 Análisis económico. En el presente proyecto ha quedado claramente expresado la importante gama de aplicaciones de los submarinos autónomos, si bien el cliente identificado es el CIDNAV (Centro de Investigaciones Navales) y teniendo en cuenta que el proyecto esta basado en un AUV para estudios marinos, no podemos dejar de resaltar que otras múltiples misiones podrían realizarse como ya se ha abordado en capítulos anteriores. En todos los casos con un importante ahorro económico y un innegable impacto social y ambiental. Los costos de una inversión como esta, están estrechamente relacionados con las precisiones de navegación y posicionamiento que demande la aplicación, sobre.
(49) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 38. todo por el costo de la IMU y el Forward Looking Sonar. Además se debe analizar la necesidad o no, de agregar un conjunto de elementos, dígase webcan, otros sensores tanto analógicos como digitales, modem acústico etc, que posibiliten ampliar el rango de aplicaciones. Ante esta variedad de circunstancias detallaremos el siguiente análisis de costos, basado en los precios del mercado internacional para los distintos componentes que es necesario adquirir. Se debe tener en cuenta que la mayoría de los componentes más importantes se tendrán que localizar en el extranjero y transportar a Cuba, se puede estimar que el presupuesto total se incremente en alrededor del 10% por costos de transportación, lo que se llevará en el análisis económico como gasto indirecto. Tabla 3.2 Análisis económico Elemento. URL. Precio(cuc). IMU-GPS. http://www.xsens.com/en/products.php. 4200.000. FLS. http://www.westmarine.com/webapp/wcs/stor. 1599.992. (Thru-Hull Ducer). es/servlet/producte/10001/1/10001/144126?C. (MTi-G). ID=cj&srccode=cii_11138&cpncode=207133955-2 Barómetro. http://www.hydrotechzs.com/hydras3.html. 799.000. Modem. http://www.digikey.be/1/1/379898-kit-dev-2-. 367.116. (X24-019-DK). 4ghz19 2k-w-rpsma-x24-019-dk.html. (Hydrolab DS5). Elemento. URL. Precio(cuc).
(50) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 39. PC/104 CPU. http://buy.advantech.com/PC-104-Modules/CPU-. (PCM-3380Z-. Modules/model-PCM-3380Z-S0A2E.htm. 700.800. S0A2E) Fuente. http://buy.advantech.com/PC-104-Modules/PC-. (PCM-3910Z-. 104-Modules/model-PCM-3910Z-00A1E.htm. 172.800. 00A1E) Memoria. http://ec.transcendusa.com/product/ItemDetail.asp. 43.520. (DDR Memory ?ItemID=TS128MSD64V3A 1GB) CFC. http://ec.transcendusa.com/product/ItemDetail.asp. (CompactFlas. ?ItemID=TS8GCF266. 77.680. hCard). Después del análisis anterior podemos llegar a que el total llevará a un valor cercano a los 7960.908 cuc más los gastos indirectos.. 3.6 Conclusiones del capítulo. Como se puede apreciar de lo expuesto en este capítulo, la estructura propuesta satisface las necesidades para lograr una operación segura y fiable en casi cualquier entorno. En la misma solo deben ser tenidos en cuenta como variables los elementos de precisión de los distintos elementos que la componen, que estarán dados por las necesidades de la aplicación en cada caso. Esta estructura permite el montaje sobre la misma de un grupo de aplicaciones variadas (capítulo.
(51) CAPÍTULO 3 OPERACIÓN DE SISTEMA. 40. 1) que para el marco de este proyecto fue la inspección submarina con fines investigativos..
Figure



Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
