Implementación de un modelo energético empleando técnicas metaheurísticas de optimización multicriterial integrando criterios económicos y ambientales
79
0
0
Texto completo
(2) 2013. Hago constar que el siguiente trabajo fue realizado en la Universidad “Martha Abreu” de Las Villas como parte de la culminación de mis estudios en la especialidad de Ciencias de la Computación, autorizando que el mismo sea utilizado por la institución, en los fines que esta estime conveniente, tanto de forma parcial como total y además no podrá ser presentado en eventos ni publicados sin el consentimiento del centro de altos estudios.. Firma del autor Los abajo firmantes, certificamos que el siguiente trabajo ha sido realizado según los acuerdos establecidos por la dirección de nuestro centro y el mismo cumple con los requisitos de un trabajo de tal envergadura referido a la temática señalada.. Firma de los Tutores. Firma del Jefe de Grupo Investigación I.
(3) Dedicatoria A mi mamá y mi papá A mi novia Claudia A mi hermana Daylen A mi familia que me ha brindado tanto apoyo A todas las personas que ayudaron en mi formación personal y profesional. II.
(4) Agradecimientos A mi mamá y mi papá por su paciencia, su gran apoyo, comprensión y por abrirme el camino hacia mi futuro A Claudia por su apoyo incondicional y por ver siempre lo mejor de mí A mi hermana Daylen por ser mi amiga y hacerme sentir orgulloso de su sonrisa A mi tía Miriam y Eldys por ayudarme a salir adelante A mis abuelos por ser mis otros padres y brindarme amor en todo momento A mis amigos, en especial a Oscar, y a todos los demás que he conocido en el transcurso de mi vida de estudiante ya que han sido relevantes en mi formación debido a su incondicionalidad en todos los momentos A mis tutores por su ayuda y esmero para conseguir alcanzar mi gran meta Al Grupo de Computación Grafica por abrirme sus puertas y dejarme demostrar lo soy A todos mis profesores en general por impartirme todos estos conocimientos A esta gran Revolución Socialista que nos brinda la oportunidad de ser grandes profesionales y a la cual le debo todo lo que he llegado a ser Darian Gomez Garcia. III.
(5) Resumen La energía eléctrica es una fuente imprescindible para la vida en nuestro planeta. La generación se produce a través del sistema electroenergético transformando, por medio de las tecnologías de conversión energéticas, los combustibles disponibles, pero este proceso libera gases tóxicos para nuestra atmósfera los cuales unidos a otras acciones irresponsables como la tala de árboles han producido daño en nuestra capa de ozono trayendo consigo el efecto invernadero , las lluvias ácidas, entre otros. Por este motivo la planificación energética es de suma importancia sobre todo para los países en planes de desarrollo como el nuestro, en pos de minimizar los costos económicos de la instalación y puesto en marcha del sistema, así como las emisiones de gases. En nuestra universidad contamos con un modelo energético capaz de calcular los costos económicos y las emisiones de gases de dicho sistema. El mismo es un modelo de optimización multiobjetivo, de alcance temporal de mediano plazo y con cobertura local. Trabaja sobre el sector energético y más específicamente sobre un sistema energético de referencia (SER). En este trabajo se realizará una caracterización de dicho modelo con el fin de realizar un software capaz de encontrar a combinación óptima de tecnologías a instalar en un territorio para suplir la demanda de energía eléctrica así como el incremento de la misma a lo largo de todo el periodo de estudio. Para esto utilizaremos técnicas de optimización multiobjetivo, más específicamente algoritmos genéticos multiobjetivos, además se le dotará al software de otras herramientas para el estudio del sistema electroenergético y así facilitar la toma de decisiones.. IV.
(6) Abstract The electric power is an essential source of energy to the life in our planet. Thru the electroenergetic system is produced the electric energy, transforming, by the energetic conversion technologies, the available fuels; but in this process, is liberated toxic gases to our atmosphere which united to another irresponsible have produced damages to the ozone. For this reason, the energetic planning is very important, especially to poor countries like ours, to minimize the cost of the installation and maintenance of the system and to minimize the amount if gases expulsed to the atmosphere. In our university we have an energetic model able to calculate the cost and the emissions of gases of the electroenergetic system. It is a multiobjective optimization model, of time range medium. Works in the energetic sector and, more specific, in the energetic reference system (SER). In this work we will characterize this model, with the objective of develop a software able to find the optimal combination of technologies to install in a region to satisfy the electric energy demand and the increment of it over the study period. To accomplished this we use multiobjective optimization techniques, more specific, multiobjective genetic algorithm. The software will have another tools to facility the study f the energetic system and make the decisions more easily.. V.
(7) 2013 Índice Introducción ........................................................................................................................................................1 Capítulo 1: Planeación de sistemas de suministro de energía eléctrica. Estado del arte. ....................................5 1.1. Introducción.........................................................................................................................................5. 1.2. Sistema Electroenergético en un Territorio. ........................................................................................5. 1.3. Necesidad de la modelación en la planeación energética. ...................................................................6. 1.4. Aspectos esenciales para el desarrollo de los modelos energéticos ....................................................6. 1.4.1. Propósito de modelado. ...............................................................................................................6. 1.4.2. Nivel de agregación. ....................................................................................................................6. 1.4.3. Cobertura geográfica. ..................................................................................................................7. 1.4.4. Alcance de planeación: corto, mediano y largo plazo. ................................................................7. 1.4.5. Trabajo con los datos. ..................................................................................................................7. 1.4.6. Tipos y cantidad de criterios de decisión. (Económicos, ambientales, energéticos y sociales). .7. 1.4.7. Técnicas de modelado. ................................................................................................................8. 1.4.8. Formulación del modelo matemático. .........................................................................................8. 1.4.9. Lenguaje de modelado.................................................................................................................8. 1.4.10. Revisión de los modelos energéticos existentes ..........................................................................9. Capítulo 2: Algoritmos Evolutivos en la Optimización Multicriterial. .............................................................12 2.1. Introducción.......................................................................................................................................12. 2.2. Formulación de la Optimización Multiobjetivo. ...............................................................................12. 2.3. Algoritmos Genéticos Multiobjetivo. ................................................................................................13. 2.3. Componentes y problemas de diseño en los algoritmos genéticos multiobjetivo. ............................14. 2.3.1 Función de evaluación. .....................................................................................................................14 2.3.2 - Diversidad: asignación de aptitud, aptitud compartida y niching ..................................................18 VI.
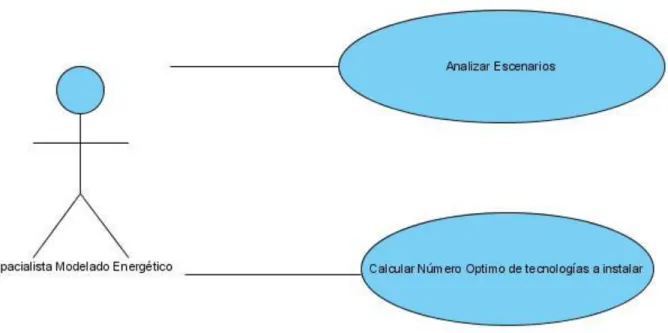
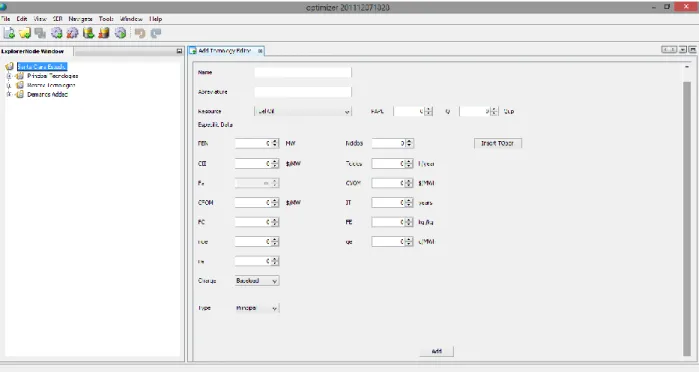
(8) 2013 2.3.3 – Elitismo .........................................................................................................................................22 2.3.5 – Manejo de restricciones .................................................................................................................24 Capítulo 3: Desarrollo del modelo matemático. ................................................................................................26 3.1. Introducción.......................................................................................................................................26. 3.2. Características generales de modelado. .............................................................................................26. 3.3. Estructura del Sistema electroenergético...........................................................................................26. 3.3.1. Generalidades. ...........................................................................................................................26. 3.3.2. PFE: Potencial de fuentes energéticas. ......................................................................................28. 3.3.3. TCE: Tecnologías de conversión energética. ............................................................................28. 3.3.4. DE: Demanda energética. ..........................................................................................................34. 3.3.5. EA: Emisiones atmosféricas. .....................................................................................................35. 3.3.6. Parámetros adicionales. .............................................................................................................35. 3.4. Técnicas de modelado. ......................................................................................................................36. 3.5. Formulación del modelo matemático. ...............................................................................................36. 3.5.1. Definición de las variables de decisión. ....................................................................................36. 3.5.2. Obtención de las Funciones Objetivos. .....................................................................................36. 3.5.3. Definición de las Restricciones. ................................................................................................40. 3.6. Lenguaje de modelado.......................................................................................................................43. Capítulo 4: Implementación del modelo utilizando Algoritmos Genéticos ......................................................44 4.1. Introducción.......................................................................................................................................44. 4.2. Diagramas de casos de usos ..............................................................................................................44. 4.3. Diagrama de clases ............................................................................................................................44. 4.4. Concepciones importantes en la implementación del software .........................................................45. 4.5. Funcionalidades y uso del software ...................................................................................................53 VII.
(9) 2013 4.6. Selección de la mejor solución. .........................................................................................................57. 4.7. Parámetros de salida. .........................................................................................................................60. 4.8. Conclusiones parciales ......................................................................................................................61. Capítulo 5: Corrida con los datos de Santa Clara y comparación de los resultados obtenidos. ........................62 5.1. Introducción.......................................................................................................................................62. 5.2. Datos de entrada ................................................................................................................................62. 5.3. Creación del escenario.......................................................................................................................62. 5.4. Resultados obtenidos. ........................................................................................................................63. 5.5. Conclusiones parciales ......................................................................................................................64. Conclusiones Generales ....................................................................................................................................65 Recomendaciones ............................................................................................................................................66 Bibliografía........................................................................................................................................................67. VIII.
(10) 2013 Introducción En la actualidad el acceso a servicios energéticos modernos es de vital importancia para el desarrollo social y económico. La energía ayuda a satisfacer necesidades humanas básicas como alimentación, transporte y albergue, contribuyen además al desarrollo social mediante el mejoramiento de la salud y la educación. En particular el acceso a electricidad es importante ya que por su naturaleza, su sustitución por otras formas de energía se hace sumamente difícil. Esta demanda energética crece aceleradamente lo que ha incrementado su impacto en el medio ambiente al extremo que se han disparado las alarmas en todo el mundo y de no tomar medidas rápidamente, el mundo como lo conocemos podría dejar de existir en un futuro no muy lejano. La combustión de combustibles fósiles es la fuente más grande de la contaminación atmosférica. Las tecnologías de conversión de energía dependen en alto grado de combustibles fósiles, lo cual no solo es un problema ambiental, sino también es un problema para los países en desarrollo que no tienen acceso a los mismos debido al alto precio en el mercado. En estos países la importación de combustible es una carga pesada para la economía y muchas veces ocasiona un balance comercial negativo y deudas, por lo que la planificación en pos de minimizar estos costos tiene una gran importancia para el desarrollo sostenible de cualquier país. El sector energético tiene una estructura compleja donde muchos aspectos deben ser considerados. Hay tres factores importantes: la energía, la economía y el medio ambiente, los cuales muchas veces tienen objetivos que están en conflicto, ya que a veces logrando un objetivo nos alejamos de otro, por lo tanto se deben optimizar todos los objetivos al mismo tiempo. Esta es una problemática que diariamente vemos pues la mayor parte de los problemas de optimización son por naturaleza multiobjetivos. Los Problemas de Optimización Multiobjetivos (MOOP por sus siglas en inglés) trabajan con dos o más funciones objetivo simultáneamente y en la mayoría de los casos esas funciones están en conflicto. Las técnicas evolutivas [Deb and Goldberg, 1989], se han utilizado dentro del campo del diseño óptimo en la industria durante las últimas décadas. Dentro de las técnicas evolutivas, las que permiten resolver problemas multiobjetivos se han venido desarrollando y aplicando con éxito en la resolución de problemas en los que se desea optimizar más de un objetivo. [Coello, 2006] Existen varios aspectos a tener en consideración cuando se buscan dichas soluciones, la decisión más importante es determinar cuál es la meta-heurística correcta para el problema: pruebas estocásticas pueden desempeñar un papel importante en la selección. Otra cosa a tener en cuenta es la configuración de los parámetros de cada meta-heurística, si esto no es bien determinado a partir de un buen método podemos obtener malas soluciones.. 1.
(11) 2013 Actualmente, la energía eléctrica es necesaria para todo ser humano para poder desarrollarse y vivir en un mundo cada vez más dependiente de las máquinas, por eso se hace imprescindible optimizar la cantidad de energía utilizada en cualquier sistema de distribución. Un sistema de distribución de energía no es más que la red que se extiende desde las subestaciones de distribución hasta los centros de procesamiento (red primaria) y finalmente a los consumidores (red secundaria). Mundialmente, los usuarios finales por lo general muestran una tendencia al incremento del consumo de energía acercándose eventualmente al límite de abasto del sistema de distribución, por esta razón, muchas veces se hace necesario la expansión del sistema, construyendo nuevas subestaciones o expandiendo las existentes, instalando nuevas líneas, entre otras cosas; esto requiere de una minuciosa planificación de éstas modificaciones para lograr un acertado sistema que se ajuste a las nuevas necesidades. La planificación de sistemas de distribución de energía es un proceso de decisión que requiere un estudio de las necesidades a cubrir, buscando identificar el mejor plan para lograr una red eléctrica que brinde una alta calidad con un costo mínimo. En [Bernal, 1998] se realiza un extenso análisis de los diversos modelos empleados en la optimización de sistemas de distribución, correspondiendo el primero al año 1960. Más recientemente, en [Khodr, 2004] se muestra una extensa revisión de los modelos utilizados en la planificación óptima de sistemas de distribución. En el Centro de Estudios Energéticos, Tecnológicos y Ambientales (CEETA) de la Universidad Central Marta Abreu de Las Villas (UCLV) se cuenta con un modelo de optimización para la planificación de un sistema de distribución para el abastecimiento de energía eléctrica en un territorio, ajustándose a las necesidades de consumo del mismo y teniendo en cuenta dos objetivos fundamentales: la minimización del costo económico de la instalación y puesta en marcha del sistema, causando un mínimo impacto medioambiental debido a las emisiones de sustancias tóxicas a la atmósfera. Planteamiento del problema A partir del modelo antes mencionado se desea implementar una herramienta utilizando técnicas meta-heurísticas capaz de a partir de datos del consumo de energía eléctrica a satisfacer en un territorio y las características de las tecnologías de producción de electricidad disponibles, brindar una combinación óptima de tecnologías para la creación de un sistema de distribución capaz de cubrir las necesidades de consumo minimizando el costo económico y las emisiones atmosféricas dañinas. Para dar solución a esta problemática se plantearon varias Preguntas de Investigación: ¿Cuáles son las técnicas meta-heurísticas para la solución de problemas de optimización multiobjetivos que mejor se ajustan a nuestro modelo? 2.
(12) 2013 ¿Cómo se puede implementar dicho modelo utilizando meta-heurística para la obtención de una combinación óptima de tecnologías? ¿Cuál de los algoritmos escogidos brinda una solución más factible para datos de la ciudad de Santa Clara? Objetivo General Implementar un modelo de optimización multiobjetivo utilizando técnicas meta-heurísticas para la obtención de la combinación óptima de tecnologías de producción eléctrica a instalar en un territorio para satisfacer una demanda de electricidad. Objetivos Específicos Seleccionar la técnica de optimización multiobjetivo que mejor se ajusta a nuestro modelo energético. Implementar el modelo energético utilizando la técnica seleccionada para la obtención de una combinación óptima de tecnologías a instalar en un territorio dado. Realizar corridas para la comparación de los resultados obtenidos con datos del consumo de la ciudad de Santa Clara. Justificación de la investigación Actualmente existen gran cantidad de técnicas para la optimización multiobjetivo, por lo que se hace necesario el estudio de las mismas para seleccionar cuál se adapta mejor a nuestro modelo y así poder implementar el mismo e integrarlo en una herramienta capaz de calcular la combinación óptima de tecnologías a instalar en un territorio teniendo en cuenta una demanda a satisfacer. Viabilidad de la investigación El estado actual de las herramientas para la planificación de sistemas de distribución y la necesidad de lograr la misma de forma rápida y confiable nos obliga a la creación de una herramienta capaz de encontrar la óptima combinación de tecnologías que crearían el sistema. Contamos para esto con el modelo de optimización multiobjetivo proporcionado por el CEETA, datos reales del consumo de energía eléctrica de la ciudad de Santa Clara para realizar corridas y comparar los resultados obtenidos y la capacidad de procesamiento de datos. Por otro lado contamos con el apoyo del Grupo de Computación Grafica del Centro de Estudios Informáticos y del Centro de Estudios Energéticos, Tecnológicos y Ambientales de nuestra universidad. 3.
(13) 2013 Hipótesis General La utilización de técnicas meta-heurísticas permite la implementación de un modelo de optimización multiobjetivo para la selección de la combinación óptima de tecnologías a instalar en un territorio para el abastecimiento del consumo de energía eléctrica en el mismo.. 4.
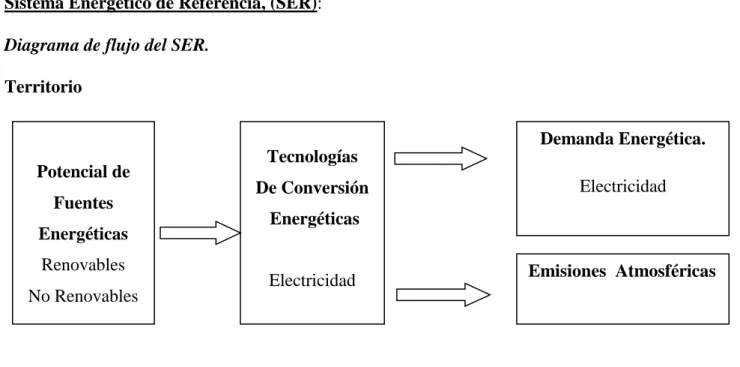
(14) 2013 Capítulo 1: Planeación de sistemas de suministro de energía eléctrica. Estado del arte. 1.1. Introducción.. Un sistema eléctrico está constituido por las etapas de generación, transmisión y distribución de energía eléctrica y su función principal es llevar esa energía desde los centros de generación hasta los centros de consumo de forma segura y con unos niveles de calidad adecuados. El sistema de distribución posee una gran importancia. [Khodr, 2004] Es la parte del sistema eléctrico que se extiende desde las subestaciones de distribución hasta los centros de transformación (red primaria), y de allí hasta los consumidores finales (red secundaria). Estos consumidores finales muestran un comportamiento en su demanda de energía eléctrica, en la mayoría de los casos, significativamente creciente, aproximándose con el tiempo a los límites de suministro de la red de distribución. Por ello, frecuentemente, es necesaria la expansión de estos sistemas de distribución, precisándose la construcción y/o ampliación de subestaciones, y la instalación y/o reconfiguración de nuevas líneas, entre otras medidas. Para ello es necesario planificar correctamente las modificaciones a realizar. La planificación de los sistemas de distribución es un proceso de decisión que precisa del estudio de las necesidades de suministro de energía eléctrica y que busca identificar el mejor plan para mejorar la red, logrando así una mayor calidad de suministro al menor coste posible. [Mendoza, 2010] 1.2. Sistema Electroenergético en un Territorio.. Uno de los sistemas de mayor importancia dentro del sector energético en un territorio es el sistema electroenergético, el cual podemos definirlo como el conjunto de actividades dirigidas a garantizar en un territorio un servicio energético de calidad mediante la explotación racional de los recursos, utilizando las tecnologías adecuadas que permitan satisfacer la demanda energética y a la vez propiciar el menor impacto ambiental posible. La estructura del sistema electroenergético presenta características propias según cada territorio. Para la modelación se puede representar utilizando un Sistema Energético de Referencia, (SER). Podemos definir un Sistema Energético de Referencia (SER), que represente el sistema energético completo de la región o nación, desde la extracción de recursos, transformación, distribución y consumo. La definición de este sistema es la base del modelo y en él se representan todas las tecnologías disponibles y todas las relaciones entre oferta y demanda. Para obtener la estructura óptima del Sistema electro energético en un territorio el paso inicial se concibe mediante un proceso de planeación. Este proceso es el instrumento eficaz pues permite analizar la situación actual (punto de partida), establecer los objetivos (metas) y definir las estrategias o cursos de acción necesarios para alcanzar dichos objetivos. Actualmente es la ingeniería de la decisión, clásicamente denominada investigación de operaciones, la disciplina que aplica herramientas y métodos avanzados para ayudar a tomar mejores decisiones en entornos 5.
(15) 2013 complejos como los procesos de planificación energéticos. Su principal característica consiste en la modelación del sistema. 1.3. Necesidad de la modelación en la planeación energética.. Un modelo matemático es una descripción matemática de un fenómeno del mundo real con el objetivo de estudiarlo y obtener conclusiones de su comportamiento. Modelar es la acción de construir un modelo. Implica la relación entre dos figuras (no necesariamente encarnadas por personas únicas sino por equipos): el modelador (encargado de la especificación y desarrollo del modelo) y el experto sobre la realidad (conocedor del problema real). La mayoría de las veces, el desarrollo de un modelo puede involucrar a un equipo multidisciplinario compuesto por matemáticos, estadísticos, ingenieros, economistas, psicólogos, etc. que aportan diferentes perspectivas y conocimiento en la representación de la realidad. Cada persona imprime su estilo en el modelo mismo y en la especificación, desarrollo y documentación. Características tales como elegancia o simplicidad pueden atribuirse a un modelo. Estas herramientas permiten evaluar la respuesta del sistema energético a las políticas, a las obligaciones o a las condiciones alternativas de funcionamiento. 1.4. Aspectos esenciales para el desarrollo de los modelos energéticos. Desde hace unos años el número de modelos energéticos disponibles se ha ido incrementando. Con la diversidad de las decisiones en la planeación de los sistemas energéticos actuales es necesario conocer en los modelos los aspectos que los caracterizan y que permiten la selección adecuada para satisfacer el problema planteado. Existen cinco aspectos esenciales a tomar en cuenta. 1.4.1 Propósito de modelado. Los modelos son generalmente desarrollados para resolver problemas específicos y por este motivo solo son aplicables para la problemática para la cual fueron diseñados. Aplicaciones incorrectas de un modelo puede resultar en significantes malinterpretaciones, las cuales no son el resultado de un mal funcionamiento del mismo, sino son responsabilidad de los usuarios del modelo. En su clasificación se hace una distinción entre propósitos generales(predicción del futuro y exploración) y propósitos específicos(análisis de suplemento-demanda o análisis de impacto) para el modelado energético.[Beeck, 1999] 1.4.2. Nivel de agregación.. La distinción entre modelos top-down y botton-up es particularmente interesante puesto que ellos tienden a producir resultados opuestos para el mismo problema. Las diferencias en los resultados de estos enfoques viene dada por la las distintas maneras en que estos dos modelos tratan la adopción 6.
(16) 2013 de las tecnologías, el comportamiento en la toma de decisiones de los agentes económicos y cómo mercados e instituciones económicas operan actualmente durante un periodo de tiempo determinado. [Beeck, 1999] 1.4.3 Cobertura geográfica. La cobertura geográfica refleja el nivel al cual el análisis tiene lugar, el cual es un importante factor en la determinación de la estructura del modelo. Los modelos globales buscan satisfacer metas que actúan sobre la economía global o situaciones parecidas, los niveles regionales generalmente se refieren a regiones específicas como Europa, América Latina, África, etc.[Beeck, 1999] También la literatura usa el término “regional” en algunos casos para referirse a regiones dentro de un país, estos casos específicos son más conocidos como cobertura local. 1.4.4 Alcance de planeación: corto, mediano y largo plazo. No existe una definición estándar de corto, mediano o largo plazo, pero generalmente se clasifican en: 5 años o menos como corto, de 3 a 15 años mediano y 10 o más años largo plazo. El alcance de planeación es muy importante debido a que diferentes procesos económicos, sociales y medioambientales son importantes a diferentes escalas de tiempo. Análisis de largo plazo pueden asumir equilibrio económico mientras que modelos de corto alcance tienen que incorporar efectos transicionales y desequilibrantes como el desempleo.[Beeck, 1999] 1.4.5 Trabajo con los datos. Los modelos requieren ciertos tipos de datos, por ejemplo, la mayoría de los modelos requieren datos de tipo cuantitativo, cardinales, algunos incluso tienen aspectos que deben ser expresados en unidades monetarias. Sin embargo, muchas veces los datos no están disponibles o no son confiables (generalmente en los países en desarrollo) en cuyos casos el modelo debe ser capaz de manejar datos cualitativos u ordinales.[Beeck, 1999] 1.4.6 Tipos y cantidad de criterios de decisión. (Económicos, ambientales, energéticos y sociales). Los modelos energéticos centrarán su accionar en diferentes sectores, ya sean económicos, ambientales o sociales, estos serán los que definan la cantidad y los tipos de criterios de decisión. Estos a su vez, determinarán el comportamiento y la complejidad del modelo. Mientras mayor cantidad de criterios de decisión, mayor será la complejidad del mismo y más cantidad de aspectos cubrirá.. 7.
(17) 2013 1.4.7 Técnicas de modelado. Las técnicas de modelado definen la estructura o forma que toma el modelo matemático. Por tanto la selección de la más idónea es un paso muy importante. Técnicas comúnmente aplicadas incluyen programación linear o programación dinámica. Por supuesto, combinación de técnicas dentro del mismo modelo es también posible.[Beeck, 1999]. Más recientemente se han aplicado técnicas de optimización evolutiva para resolución de modelos energéticos por varios autores.[Mendoza, 2010] 1.4.8. Formulación del modelo matemático.. Es el paso más importante. Tomando en cuenta los aspectos anteriores se establece la relación entre las variables de decisión definidas, el número de funciones objetivos y las posibles restricciones en forma de expresiones matemáticas. 1.4.9 Lenguaje de modelado. El lenguaje de modelado se define como aquellas herramientas creadas como soporte de las técnicas de modelados mediante la implementación de algoritmos o métodos para dar solución al modelo. Las principales alternativas actuales para el desarrollo de modelos de optimización suelen ser: [Pedro Linares, 2001] . Lenguajes de programación de propósito general (C, C++, Java, Visual Basic, FORTRAN 90) que llaman a una biblioteca de optimización: tienen sentido cuando el tiempo de solución es crítico o el modelo es ejecutado con mucha frecuencia, cuando se necesitan interfaces a medida para la entrada y salida de resultados, cuando el modelo tiene que ser integrado en otra aplicación o se necesitan algoritmos de optimización específicos. Además permiten la implantación del modelo en un entorno de software o hardware especial. Como contrapartida requiere un tiempo de desarrollo muy elevado y, sobre todo, presenta una gran dificultad y consumo de recursos para el mantenimiento del código.. . Lenguajes o entornos de cálculo numérico o simbólico (hojas de cálculo, lenguajes para cálculo numérico intensivo, como MATLAB, o para cálculo simbólico, como Maple o Mathematica, etc.): los optimizadores de las hojas de cálculo, por ser aplicaciones muy comunes y conocidas, pueden ser un vehículo eficaz de difusión de un modelo entre ciertos tipos de usuarios y facilitan el manejo de datos que se encuentren ya en dicho formato [Ragsdale, 1998]. Como ventajas específicas se pueden mencionar: su facilidad de uso, su integración total con la hoja de cálculo, la familiaridad con el entorno que facilita la explicación del modelo y de sus resultados, así como la facilidad de presentación de resultados en gráficos. Sin embargo, no inducen una buena práctica de programación, presentan la dificultad de su desarrollo, verificación, validación, 8.
(18) 2013 actualización, documentación y, en general, el mantenimiento del modelo y no permiten modelar problemas complejos o de gran tamaño.[Gass, 1995] Los lenguajes de cálculo numérico o simbólico no son específicos de problemas de optimización pero facilitan la manipulación numérica o simbólica de matrices y vectores. También disponen de funciones de optimización. Todas estas alternativas pueden ser utilizadas para desarrollo rápido de un prototipo o una demostración ya que presentan capacidades de presentación gráfica que pueden ser aprovechadas. Son difícilmente utilizables cuando se plantean problemas de optimización de tamaño medio o superior. . Lenguajes algebraicos de modelado: son las alternativas más complejas y potentes por su capacidad de indexación de las variables y ecuaciones, permiten cambiar sin dificultad las dimensiones del modelo, de forma natural separan datos de resultados. Desde el punto de vista del modelador permiten la detección de errores de consistencia en la definición y verificación del modelo. Desde el punto de vista del usuario simplifican drásticamente su mantenimiento. Entre los lenguajes de modelado más conocidos se pueden mencionar: GAMS (www.gams.com) y AMPL (www.ampl.com) de origen estadounidense y AIMMS (www.aimms.com) y XPRESSMP (www.dash.co.uk) de origen europeo, por citar algunos. Existe una herramienta integrada denominada OPLStudio (www.ilog.com), en la que se dispone de un lenguaje de modelado (OPL) y varios optimizadores dependiendo del modelo propuesto. Está especialmente desarrollada para problemas de programación (scheduling) y planificación, aunque admite también cualquier modelo de optimización lineal y lineal entera mixta. Es una herramienta integrada ya que además del lenguaje de modelado, incluye sus propios optimizadores, Scheduler, Planner, Solver, CPLEX, estando los tres primeros basados en la programación de restricciones y el último en programación matemática. GAMS es el lenguaje más ampliamente difundido comercialmente con su propia lista de discusión de usuarios ([email protected]) mientras que AMPL se está potenciando mucho en las universidades estadounidenses. Existe un proyecto denominado NEOS (www.neos.mcs.anl.gov) para el cálculo distribuido que permite el envío de problemas de optimización escritos en AMPL o GAMS a través de internet y éstos son resueltos en servidores de la red devolviendo los resultados de la optimización.. 1.4.10 Revisión de los modelos energéticos existentes A continuación ofrecemos una tabla con la caracterización de algunos de los modelos existentes.[Beeck, 1999] EFOM-ENV. 9.
(19) 2013. Desarrolladores. Comisión Europea DDG-XII F/1, Bélgica General: exploración.. Propósito. Específico: suplemento de energía sujeto a restricciones técnicas, medioambientales y políticas.. Agregación. Bottom-Up. Técnica de Modelado. Programación linear y Programación Dinámica.. Cobertura Geográfica. Nacional.. Alcance. Mediano a largo plazo. ENERPLAN. Desarrolladores. Grupo de Análisis de Energía de Tokio, Japón General: pronóstico o exploración, dependiendo del modo.. Propósito Específico: suplemento y demanda de energía. Agregación. Top-Down. Técnica de Modelado. (no disponible). Cobertura Geográfica. Nacional.. Alcance. Corto a medio plazo.. 10.
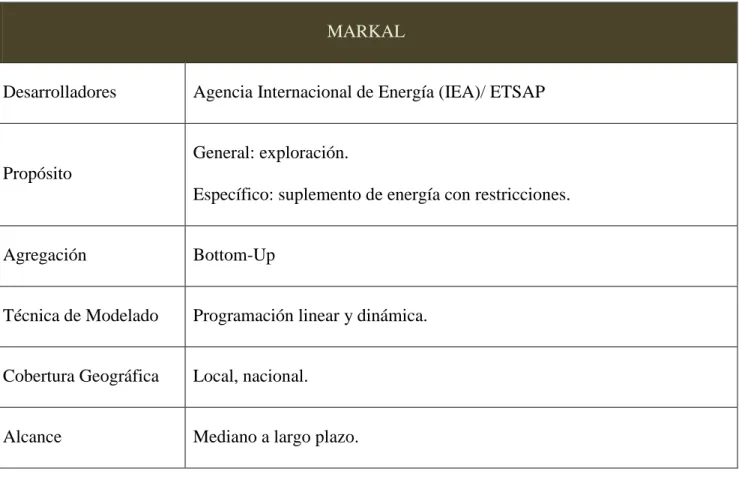
(20) 2013. MARKAL Desarrolladores. Agencia Internacional de Energía (IEA)/ ETSAP General: exploración.. Propósito Específico: suplemento de energía con restricciones. Agregación. Bottom-Up. Técnica de Modelado. Programación linear y dinámica.. Cobertura Geográfica. Local, nacional.. Alcance. Mediano a largo plazo. Tabla 1: Algunos Modelos Energéticos existentes.. 11.
(21) 2013 Capítulo 2: Algoritmos Evolutivos en la Optimización Multicriterial. 2.1 Introducción. Los algoritmos evolutivos es una de las ramas de la computación más estudiadas en la actualidad a causa de la gran cantidad de aplicaciones que tienen. En este capítulo se hará una revisión de las diferentes técnicas que existen en la optimización evolutiva multiobjetivo en pos de poder seleccionar la que mejor se adapta a nuestro problema en específico, en capítulos posteriores se harán pruebas del software obtenido con diferentes técnicas de optimización multiobjetivo con el fin de comparar los resultados obtenidos. 2.2 Formulación de la Optimización Multiobjetivo. Consideremos un problema donde se quiere optimizar K objetivos tales que no están acorde entre ellos y además no se puede apreciar ninguna preferencia de alguno por sobre el resto. Sin perder generalidad, todos los objetivos están minimizando, los objetivos pueden ser convertidos a maximización multiplicando cada uno de ellos por -1. Un problema de minimización multiobjetivo con K objetivos puede ser definido de la siguiente forma: dada la variable de decisión x, sea x el { } en el espacio de solución X, encontrar un vector x´ vector de n dimensiones que minimice las K funciones objetivos { }. El espacio de solución X es generalmente restringido por un conjunto de restricciones . En muchos problemas de la vida real, los objetivos se encuentran en conflicto entre ellos, por eso, optimizar x con respecto a una sola función objetivo frecuentemente nos proporciona resultados inaceptables con respecto a las otras funciones objetivo. Sin embargo, una solución multiobjetivo perfecta que simultáneamente optimice cada una de las funciones es casi imposible, por eso se hace más razonable buscar un conjunto de soluciones, donde cada una satisfaga los objetivos a un nivel aceptable sin ser dominada por las demás. Si todas las funciones están en minimización, una solución factible x se dice que domina a otra solución factible y, si y solo si y para al menos una función objetivo j. Una solución es considerada un Óptimo de Pareto si no es dominada por ninguna otra en el espacio de solución. Un óptimo de Pareto no puede ser mejorado con respeto a un objetivo sin empeorar al menos otro. El conjunto de todas las soluciones factibles no-dominadas en X es llamado conjunto de óptimos de Pareto, para un conjunto de óptimos de Pareto dado, los correspondientes valores de la función objetivo en el espacio de búsqueda son llamados frente de Pareto. Para muchos problemas, el número de óptimos de Pareto es enorme, quizás infinito, por este motivo, el objetivo principal de un algoritmo de optimización multiobjetivo es identificar soluciones en el conjunto de óptimos de Pareto, sin embargo, la identificación del conjunto completo se torna muchas veces prácticamente imposible, debido a su tamaño. Además, para muchos problemas, 12.
(22) 2013 especialmente los de optimización combinatoria, probar la optimalidad no es factible computacionalmente. Un enfoque práctico de la optimización multiobjetivo es investigar un conjunto de soluciones que represente el conjunto de óptimos de Pareto lo mejor posible. Siguiendo este método, un algoritmo de optimización multiobjetivo debe lograr las siguientes metas, las cuales están en conflicto entre ellas: . El mejor frente de Pareto conocido debe ser lo más cercano posible al verdadero frente de Pareto, lo ideal sería que el mejor conjunto de Pareto conocido sea un subconjunto del conjunto de óptimos de Pareto.. . Las soluciones en el mejor conjunto de Pareto conocido deben ser uniformemente distribuidas y diversas por todo el frente de Pareto, con el fin de brindar una verdadera imagen acerca de las ventajas y desventajas del mismo.. . El mejor frente de Pareto conocido debe abarcar todo el espectro del frente de Pareto. Esto requiere investigar las soluciones de los extremos del espacio de búsqueda.. Cuando el tiempo computacional es limitado, la primera meta se logra mejor enfocando e intensificando la búsqueda en regiones particulares del frente de Pareto. Por el contrario, la segunda meta demanda que los esfuerzos en la búsqueda sean uniformemente distribuidos por todo el frente de Pareto. La tercera apunta a extender el frente de Pareto hacia los dos extremos, explorando las nuevas soluciones en los mismos. 2.3 Algoritmos Genéticos Multiobjetivo. Debido a que es un enfoque basado en poblaciones, los Algoritmos Genéticos (AG) son muy apropiados para la resolución de problemas de optimización multiobjetivo. Un AG genético de un solo objetivo puede ser modificado para encontrar un conjunto de múltiples soluciones nodominadas en una sola corrida. La habilidad de los AG de buscar simultáneamente en diferentes regiones del espacio de solución hace posible encontrar un conjunto diverso de soluciones para problemas con no-convexos, discontinuos y multimodal espacios de solución. La mayoría de los AG no requieren que el usuario priorice, escale o le introduzca pesos a los objetivos, por esto, los AG han sido la heurística más popular para la solución de problemas de optimización multiobjetivo. Jones Etal [Jones, 2002] reportó que el 90 % de los enfoques para los problemas multiobjetivos buscan aproximar el verdadero frente de Pareto. La mayoría de estos utilizan una técnica metaheurística y el 70 % de los enfoques meta-heurísticos están basados en optimización evolucionaria. El primer AG multiobjetivo, llamado AG de vectores evaluados (o VEGA), fue propuesto por Schaffer.[Schaffer, 1985] Luego, varios algoritmos evolucionarios multiobjetivo fueron desarrollados incluyendo Multi-objective Genetic Algorithm (MOGA)[Fonseca and Fleming, 1993], 13.
(23) 2013 Niched Pareto Genetic Algorithm (NPGA)[Horn, Nafpliotis et al., 1994], Weight-based Genetic Algorithm (WBGA)[Hajela and Lin, 1992], Random Weighted Genetic Algorithm (RWGA)[Murata and Ishibuchi, 1995], Nondominating Sorting Genetic Algorithm (NSGA)[Srinivas and Deb, 1994], Strengh Pareto Evolucionary Algorithm (SPEA)[Zitzler and Thiele, 1999], SPEAD mejorado (SPEA2)[Zitzler, Laumanns et al., 2001], Pareto-Archived Evolution Strategy (PAES)[Knowles and Corne, 2000], Pareto Envelope-based Selection Algorithm (PESA)[Corne, Knowles et al., 2000], Region-based Selection in Evolutionary Multiobjective Optimizacion (PESA-II)[Corne, Jerram et al., 2001], Fast Nondominating Sorting Genetic Algorithm (NSGA-II)[Deb, Pratap et al., 2002], Multi-objective Evolucionary Algorithm (MEA)[Sarker, Liang et al., 2002], Micro-GA[Coello and Pulido, 2001], Rank-Density Based Genetic Algorithm (RDGA)[Lu and Yen, 2003] y Dynamic Multiobjective Evolutionary Algorithm (DMOEA)[Yen and Lu, 2003]. Podemos notar que en la literatura existen muchas variaciones de los AG multiobjetivo, estos algoritmos citados anteriormente son bien conocidos y han sido usados en muchas aplicaciones y su rendimiento ha sido probado en varios estudios comparativos. Muchos han sido los estudios publicados sobre AG multiobjetivo, Coello lista más de 2000 referencias en su sitio web [Coello, 2005]. Generalmente, estos algoritmos difieren en su función de evaluación, elitismo o los procedimientos para la diversificación. En este trabajo abordaremos los principales componentes en el diseño de un algoritmo genético multiobjetivo, además se presentará un pseudocódigo para los AG más conocidos. 2.3. Componentes y problemas de diseño en los algoritmos genéticos multiobjetivo.. 2.3.1 Función de evaluación. Suma de pesos El enfoque clásico en la solución de problemas de optimización multiobjetivo es la asignación de pesos wi a cada función objetivo normalizada convirtiéndolo así en un problema de un solo objetivo con una función escalar como: (1) Donde z´i (x) es la función objetivo normalizada zi (x) y ∑ . Esto es un procedimiento a priori ya que el usuario tiene que proveer los pesos. Resolver un problema con la función objetivo (1) para un vector de pesos { } nos proporciona una única solución, si se quiere obtener múltiples soluciones el problema debe ser resuelto muchas veces con diferentes combinaciones de vectores de pesos. La mayor dificultad de este enfoque es la selección del vector de pesos para cada corrida. Para automatizar este proceso, Hajela y Lin [Hajela and Lin, 1992] propusieron el WBGA para optimización multiobjetivo (WBGA-MO), en el mismo cada solución xi en la población usa un 14.
(24) 2013 diferente vector de pesos { } en el cálculo de la función objetivo (1). El vector de pesos wi es insertado dentro del cromosoma de la solución xi así múltiples soluciones pueden ser buscadas en una sola corrida, además, los vectores de pesos pueden ser ajustados para promover la diversidad de las poblaciones. Otros investigadores han propuesto un algoritmo genético multiobjetivo basado en la suma de múltiples funciones objetivos con pesos donde un vector normalizado wi es generado aleatoriamente para cada solución xi durante la fase de selección para cada generación. Este enfoque busca estimular la búsqueda en múltiples direcciones en una sola corrida sin el uso de parámetros adicionales. El procedimiento general de los RWGA utilizando vectores de pesos aleatorios es dado a continuación: [Murata, Ishibuchi et al., 1996] Procedure RWGA: E = archivo externo para almacenar las soluciones no-dominadas encontradas hasta el momento. nk = número de soluciones elitistas que emigran desde E hacia P en cada generación. Paso 1: generar una población aleatoria inicial. Paso 2: asignar un valor de evaluación a cada solución. realizando los siguientes pasos:. Paso 2.1: generar un número aleatorio uk en [0,1] para cada objetivo k, k = 1,…, K ∑. ⁄. Paso 2.2: calcular el peso aleatorio de cada objetivo k como: ∑. Paso 2.3: calcular la evaluación de la solución como:. Paso 3: calcular la probabilidad de selección de cada solución (. ). ∑. (. ) donde. .. {. como sigue: }. Paso 4: seleccionar los padres usando la probabilidad calculada en el paso 3. Aplicar el cruce en los padres seleccionados para crear N descendientes. Matar los descendientes con una probabilidad de mutación predefinida, copiar todos los descendientes para Pi+1. Actualizar E si es necesario. Paso 5: aleatoriamente quitar nE soluciones de Pi+1 y agregar el mismo número de soluciones desde E hacia Pi+1. Paso 6: si la condición de parada no se satisface, i = i+1 e ir al paso 2, sino devolver E.. 15.
(25) 2013 La mayor ventaja de la suma de pesos es que es una implementación sencilla debido a que un solo objetivo es usado en la función de evaluación, un AG de un solo objetivo puede ser usado con un mínimo de modificaciones, además es un enfoque eficiente computacionalmente. La principal desventaja es que no todas las soluciones no-dominadas pueden ser investigadas cuando el verdadero frente de Pareto es no convexo, por esto, los AG multiobjetivos basados en la suma de pesos presentan dificultades buscando soluciones uniformemente distribuidas sobre una superficie de búsqueda no convexa. [Zitzler, 2000] Modificación de la función objetivo Como se mencionó anteriormente, VEGA [Schaffer, 1985] es el primer AG usado para aproximar el conjunto de óptimos de Pareto con un conjunto de soluciones no-dominadas. En el VEGA, la población Pt es dividida aleatoriamente en K subpoblaciones de igual tamaño: P1, P2,…, PK, luego, a cada solución en la subpoblación Pi es asignado un valor de evaluación basado en la función objetivo zi. Las soluciones son seleccionadas de esas subpoblaciones usando selección proporcional para el cruce y la mutación. El cruce y la mutación son aplicados a las nuevas poblaciones de la misma forma que en un AG de un solo objetivo. Procedure VEGA: NS = tamaño de las subpoblaciones (NS = N/K) Paso 1: comenzar con una población inicial aleatoria P0. t = 0. Paso 2: si se satisface la condición de parada, entonces devolver Pt. Paso 3: ordenar aleatoriamente la población Pt. Para cada objetivo k, k = 1,…, K; realizar los siguientes pasos: Paso 4.1: para i = 1 + (k - 1) NS,…, kNS, asignar el valor de evaluación ésima solución en la población ordenada.. a la i-. Paso 4.2: basado en el valor de evaluación asignado en el paso 4.1, seleccionar NS soluciones entre (1 + (k - 1)NS) –ésima y la (kNS) –ésima solución de la población ordenada para crear subpoblación Pk. Paso 5: combinar todas las poblaciones P1,…, Pk y aplicar cruce y mutación a la combinación para crear Pt + 1 de tamaño N. t = t + 1, ir al paso 2.. 16.
(26) 2013 Un procedimiento similar al VEGA es utilizar solo una sola función objetivo la cual es determinada aleatoriamente cada vez en la fase de selección[Kursawe, 1991]. La mayor ventaja de alternar los objetivos es su fácil implementación y es tan eficiente computacionalmente como un AG de un solo objetivo, de hecho, este procedimiento es una extensión de un AG de un solo objetivo para resolver problema multiobjetivos. La desventaja radica en que las poblaciones tienden a converger hacia soluciones que son superiores en un objetivo, pero pobres en otros. Rango de Pareto El rango de Pareto explícitamente utiliza el concepto de dominación de Pareto para la evaluación o la asignación de probabilidad de selección a las soluciones. La población es clasificada de acuerdo a una regla de dominación y después a cada solución es asignado un valor de evaluación basado en su rango en la población, no en el valor de la función objetivo actual, como todos los objetivos están en minimización, un rango más bajo corresponde a una solución mejor. La primera técnica que usó rango de Pareto fue propuesta por Goldberg [Goldberg, 1989] como sigue: Paso 1: tomar i = 1 y TP = P. Paso 2: identificar todas las soluciones no-dominadas en TP y asignarlas a Fi. Paso 3: TP = TPFi. Si TP = Paso 4: para cada solución. ir al paso 4, sino i= i+1 e ir al paso 2. en la generación t, asignar el rango r1= i si. .. En el procedimiento anterior, F1, F2, ... , son llamados frentes no-dominados y F1 es el frente de Pareto de la población P. NSGA [Srinivas and Deb, 1994] también clasifica la población en frentes no-dominados usando un algoritmo similar al dado anteriormente, luego se asigna un valor de evaluación es asignado a cada frente usando una función de reparto de adaptabilidad tal que el peor valor de evaluación de Fi es mejor que le mejor valor asignado a Fi + 1. NSGA-II [Deb, Agrawal et al., 2000], un algoritmo más eficiente, fue desarrollado para formar frentes no-dominados. Fonseca y Flemming [Fonseca and Fleming, 1993] usaron un procedimiento diferente para asignar los rangos, este era: , donde es el número de soluciones que dominan a x en la generación t. Este método de asignación de rango penaliza las soluciones que se encuentran en regiones del espacio de búsqueda que están densamente pobladas por secciones del frente de Pareto. SPEA [Zitzler and Thiele, 1999] usa un procedimiento para asignar mejores valores de rango a soluciones no-dominadas que se encuentran en regiones poco representadas en el espacio de búsqueda. En el SPEA, una lista externa E de tamaño fijo guarda las soluciones no-dominadas que 17.
(27) 2013 han sido investigadas hasta el momento en la búsqueda, para cada solución valor de fuerza de la forma siguiente: que y domina en P. El rango el rango de una solución. donde. , se define un. es el número de soluciones. de una solución es asignado como: es calculado de la forma siguiente:. ∑. y .. Por este método se fomenta la distribución uniforme de las soluciones en el espacio de búsqueda. La estrategia de acumulación de rango también busca penalizar la redundancia en la población debido a ∑ la sobrerrepresentación. Este método es: . Para calcular el rango de una solución x, primero debe ser calculado el rango de las soluciones que la dominan. Hasta el momento, algunos de los enfoques basados en rango descritos pueden ser utilizados directamente para asignar valores de aptitud a soluciones individuales, estas son combinadas casi siempre con varias técnicas de distribución de rangos para lograr la segunda meta en la optimización multiobjetivo: encontrar un frente de Pareto diverso y uniforme. 2.3.2 - Diversidad: asignación de aptitud, aptitud compartida y niching Una importante consideración a tener en cuenta en la optimización multiobjetivo es la diversidad de las poblaciones, para poder lograr soluciones uniformemente distribuidas por todo el frente de Pareto, si no se toman medidas preventivas las poblaciones tienden a formar pocos grupos en los AG multiobjetivos, este fenómeno es llamado amontonamiento genético. Para evitarlo se han concebidos muchos procedimientos, algunos de los cuales estudiaremos a continuación. Aptitud compartida El compartir la aptitud fomenta la búsqueda en sectores no explorados del frente de Pareto con la reducción artificial del valor de aptitud de soluciones que se encuentran en áreas densamente pobladas. Para lograrlo, primeramente son identificadas las áreas densamente pobladas y luego se utiliza un método de penalización, el cual se aplica a dichas soluciones. La idea de compartir la aptitud fue propuesta por primera vez por Goldberg y Richardson [Goldberg, 1987] en la investigación del óptimo local para funciones multi-modales. Fonseca y Flemming [Fonseca and Fleming, 1993] usaron esta idea para penalizar soluciones agrupadas con el mismo rango de la forma siguiente: Paso 1: calcular la distancia Euclidiana entre cada par solución x y y en el espacio objetivo normalizado entre 0 y 1 como:. √∑. (. ) (3), donde. y. son el. 18.
(28) 2013 valor máximo y mínimo, respectivamente, de la función objetivo durante la búsqueda.. obtenido hasta el momento. Paso 2: en esas distancias, calcular un niche count para cada solución {. }, (4), donde. de la forma siguiente:. es el tamaño del niche.. Paso 3: después de calcular los niche counts, el valor de aptitud de cada solución es ajustado como sigue:. .. En el procedimiento anterior, define una vecindad de soluciones en el espacio objetivo. Las soluciones en la misma vecindad contribuye con cada uno de los niche count de las demás, por esto, una solución en una vecindad muy poblada tendrá un niche count alto, reduciendo así la probabilidad de selección de esa solución como padre para la siguiente generación. Como resultado, niching limita la proliferación de soluciones en una vecindad en particular del espacio objetivo. Otra alternativa es usar la distancia en el espacio de decisión entre dos soluciones x e y la cual se define: √. ∑. , (5), en el cálculo del niche count, Eq. (5) es una medida de la. diferencia estructural de dos soluciones, dos soluciones pueden estar muy cerca en el espacio objetivo pero sin embargo tener diferentes características estructurales, por esto, fitness sharing basado en el espacio objetivo puede reducir la diversidad en el espacio de la variable de decisión. Sin embargo, Deb y Goldberg [Deb and Goldberg, 1989] reportaron que el fitness sharing en el espacio objetivo frecuentemente trabaja mejor que uno basado en el espacio de la variable de decisión. Una de las desventajas del fitness sharing basado en niche counts es que el usuario debe seleccionar nuevos parámetros, . Para solucionar este problema, Deb y Goldberg [Deb and Goldberg, 1989] y Fonseca y Flemming [Fonseca and Fleming, 1993] desarrollaron procedimientos sistemáticos para estimar y actualizar dinámicamente . Otra desventaja es el esfuerzo computacional para calcular los niche counts, sin embargo, los beneficios generalmente sobrepasan este coste computacional extra. Miller y Shaw [Miller and Shaw, 1996] propusieron un enfoque dinámico del niche sharing para incrementar la efectividad de calcular los niche counts. MOGA [Fonseca and Fleming, 1993] fue el primer AG multiobjetivo que uso explícitamente las técnicas de ranking y el niching basadas en el concepto de Pareto juntas para fomentar la búsqueda en dirección del verdadero frente de Pareto mientras se mantenía la diversidad en la población, por esto, es un buen ejemplo para demostrar como el ranking y el niching basados en el concepto de Pareto pueden ser integradas en un AG multi-objetivo. El procedimiento del MOGA es dado a continuación: 19.
(29) 2013 Paso 1: comenzar con una población inicial P0. t = 0. Paso 2: si se satisface el criterio de parada, devolver Pt. Paso 3: evaluar el fitness de la población de la forma siguiente: Paso 3.1: asignar un rango r(x,t) para cada solución Eq. (2).. usando el esquema de ranking dado en la. Paso 3.2: asignar una finess value para cada solución basado en el rango de la solución como sigue: –∑. [Miller and Shaw, 1996] de soluciones con rango k. Paso 3.3: calcular el niche count. (. de cada solución. Paso 3.4 calcular el shared fitness value de cada solución Paso. 3.5:. normalizar. el. fitness. value. usando. ) donde nk es el número. usando al Eq. (4) como sigue: el. shared. ⁄ fitness. . value:. .. ∑. Paso 4: usar un método de selección estocástico basado en f´´ para seleccionar los padres. Aplicar cruce y mutación hasta que se complete la población de descendientes Qt de tamaño N. Poner Pt+1 = Qt. Paso 5: hacer. y pasar al Paso 2.. En el SPEA2 [Zitzler, Laumanns et al., 2001], es usada una medida de densidad para discriminar entre soluciones con el mismo rango, donde la densidad de una solución es definida como el inverso de la distancia a su k-ésimo vecino más cercano en el espacio de la función objetivo. La densidad de una solución es similar a su niche count, sin embargo, seleccionar un valor para el parámetro k es más sencillo que seleccionar un valor para . Crowding Distance La crowding distance es utilizada para obtener una distribución uniforme de las soluciones por todo el frente de Pareto sin usar un parámetro de fitness sharing. Por ejemplo, NSGA-II [Deb, Agrawal et al., 2000] utiliza un método de crowding distance de la siguiente forma: Paso 1: clasificar la población e identificar todas los frentes no-dominados F1, F2,…, FR. para cada frente j = 1,…, R repetir los pasos 2 y 3. 20.
(30) 2013 Paso 2: para cada función objetivo k, ordenar las soluciones en Fj en orden ascendente. Hacer y x[i,k] representa la i-ésima solución en la lista ordenada con respecto a la función objetivo k. asignamos (. ). (. (. ) ). y. (. ). y para. asignar. (. ). .. Paso 3: para encontrar la crowding distance total de una solución x, sumar las crowding distances de la solución con respecto a cada objetivo. La mayor ventaja de la crowding distance es que se puede obtener una medida de la densidad de la población alrededor de una solución sin el requerimiento de una parámetro definido por el usuario como o el k-ésimo vecino mas cercano. En el NSGA-II, la medida de la crowding distance es usada para determinar una mejor solución en caso de empate llamado crowded tournament selection operator: seleccionar aleatoriamente dos soluciones x e y; si las soluciones están en el mismo frente no-dominado, la solución con un mayor crowding distance es el ganador. Si no, la solución con el menor rango es seleccionada. Densidad basada en celdas Este procedimiento se basa en la división del espacio objetivo en celdas de K dimensiones. El número de soluciones en cada celda es definido como la densidad de la celda y la densidad de una solución es igual a la densidad de la celda en la cual la solución está ubicada. Esta información de la densidad es utilizada para lograr diversidad, algo similar al fitness sharing. Por ejemplo, en PESA [Corne, Knowles et al., 2000], entre dos soluciones no dominadas, la que tiene la menor densidad es preferible. PESA-II [Corne, Jerram et al., 2001] tiene un acercamiento más directo, llamado selección basado en regiones, donde las celdas en sí son las seleccionadas en vez de una única solución durante el proceso de selección. En el mismo, una celda que este ocupada con soluciones esparcidas tiene un chance mayor de ser elegida que una celda muy poblada, cuando una celda es elegida, las soluciones dentro de la misma son seleccionadas aleatoriamente para participar en el cruce y la mutación. Lu and Yen [Lu and Yen, 2003] y Yen and Lu [Yen and Lu, 2003] desarrollaron un enfoque eficiente para identificar una celda en el caso de celdas de dimensiones dinámicas, aquí, el tamaño ( )⁄ de una celda en el k-ésimo espacio objetivo es donde es el numero de celdas dedicadas a la dimensión objetivo k y y son los valores máximo y mínimo respectivamente de la función objetivo k encontrados hasta el momento en la búsqueda, respectivamente, estas son actualizadas cuando se encuentra un nuevo máximo o mínimo. RDGA 21.
(31) 2013 [Lu and Yen, 2003] usa la densidad basada en celdas de una forma interesante para convertir un problema general de k objetivos en un problema de optimización bi-objetivo con los objetivos de minimizar el valor del rango y la densidad de la población. La mayor ventaja del enfoque basado en celdas es que obtenemos un mapa global de la densidad del espacio de búsqueda como resultado del cálculo de la densidad. La búsqueda puede ser fomentada hacia regiones inhabitadas del espacio de búsqueda basado en este mapa. Otra ventaja es su eficiencia computacional comparada con el niching y las técnicas basadas en vecindad. Yen and Lu [Yen and Lu, 2003] propusieron varias estructuras de datos y algoritmos para guardar eficientemente la información de las celdas y modificar la densidad de las mismas. 2.3.3 – Elitismo El elitismo en el contexto de los algoritmos de un solo objetivo no es más que la mejor solución encontrada hasta el momento durante la búsqueda siempre sobrevive a la siguiente generación. En los AG multiobjetivo todas las soluciones no dominadas son consideradas soluciones élites. Sin embargo, la implementación del elitismo en estos no es tan fácil como lo es en los AG de un solo objetivo principalmente debido a la gran cantidad de posibles soluciones élites. Al principio, los AG multiobjetivos no utilizaban elitismo, pero los AG desarrollados más recientemente si lo hacen. Como podemos apreciar en [Zitzler and Thiele, 1999], [Deb, 2001], [Veldhuizen and Lamont, 2000, los AG multiobjetivos que lo utilizan tienden a superar sus contrapartes no elitistas. Existen dos estrategias para implementar el elitismo [Jensen, 2003 #65]: mantener las soluciones élites en la población y guardar las soluciones élites en una lista externa y reintroducir las mismas en la población. Estrategias para mantener las soluciones élites en la población. La selección aleatoria no nos asegura que una solución no-dominada sobrevivirá a la siguiente generación. Una implementación sencilla sería copiar todas las soluciones no-dominadas en la población Pi para Pi+1, luego llenar el resto de Pi+1 seleccionando de las soluciones dominadas restantes en Pi. Este procedimiento no funcionará cuando el número de padres e hijos no-dominados es mayor que NP. Para resolver este problema han sido propuestas varias variantes de implementación. Konak and Smith [Konak and Smith, 2002], [Konak* and Smith, 2004] propusieron un AG multiobjetivo con un tamaño de la población dinámico y una estrategia de puro elitismo. En este, la población incluye solo soluciones no-dominadas, si el tamaño de la población alcanza una cota máxima Nmax, Nmax – Nmin soluciones son quitadas de la población teniendo en consideración el mantenimiento de la diversidad del actual frente no-dominado. Para lograr esto, es utilizado un torneo de selección de dominancia de Pareto de la siguiente forma [Horn, Nafpliotis et al., 1994]: dos soluciones son seleccionadas aleatoriamente y la solución con mayor niche count es eliminada 22.
(32) 2013 debido a que todas las soluciones son no-dominadas. Además ha sido propuesto un AG multiobjetivo similar con un tamaño dinámico de la población.[Sarker, Liang et al., 2002] NSGA-II usa una población de tamaño N. en la generación t, los descendientes Qt de tamaño N son creados de los padres Pt y se identifican los frentes no dominados F1, F2,…, FR en la combinación de los dos frentes . La siguiente población Pt+1 es llenada comenzando por F1, luego F2 y así sucesivamente de la forma siguiente: siendo k el índice de un frente no-dominado tal que y . Primero todas las soluciones en los frentes F1, F2,…, Fk son copiados para Pt+1 y luego las menos pobladas soluciones en Fk+1 son adicionadas a Pt+1. Este procedimiento asegura que todas las soluciones no-dominadas (F1) son incluidas en la siguiente población si y la segunda elección basada en la crowding distance promueve diversidad. La mayor ventaja que brinda esta implementación es su sencillez, en esta estrategia, el tamaño de la población es un importante parámetro debido a que no se utiliza un archivo externo para guardar las soluciones no-dominadas descubiertas. Elitismo con poblaciones externas Cuando se utiliza una lista externa para almacenar las soluciones élites deben ser tratados varios problemas. Primeramente, hay que determinar qué soluciones son las que van hacia la lista elitista E. la mayoría de loa AG multiobjetivos guardan las soluciones no-dominadas encontradas hasta el momento [Zitzler and Thiele, 1999] y E es actualizada cada vez que una solución es creada removiendo las soluciones elites dominadas por la nueva o agregando las nueva solución si no es dominada por ninguna solución élite existente. Esta es una operación costosa computacionalmente. Muchas estructuras de datos han sido propuestas para guardar, actualizar y buscar eficientemente en la lista E [Fieldsend, Everson et al., 2003], [Mostaghim, Teich et al., 2002]. Otro problema es el tamaño de la lista E. debido a que la cantidad de óptimos de Pareto puede ser bastante grande para un problema, la lista puede crecer enormemente, por esto, varias técnicas de poda han sido propuestas para controlar el tamaño de E, por ejemplo, SPEA usa en método para reducir el tamaño de E a una cota N cuando el tamaño de la misma excede este número [Morse, 1980]. El problema final es la selección de las soluciones que deben ser reintroducidas en la población. En varios algoritmos son seleccionadas soluciones para Pt+1 de la combinación de las poblaciones Pt y Et. Para implementar esta estrategia, son combinadas las poblaciones Pt y Et y se le asigna un valor de aptitud a cada una de las soluciones en la población combinada , luego son seleccionadas N soluciones para la siguiente generación basándose en el valor de aptitud asignado. Otra estrategia es reservar espacio para n soluciones élites en la siguiente población [Ishibuchi and Murata, 1996]. En esta estrategia N – n soluciones son seleccionadas de los padres y los descendientes creados 23.
(33) 2013 recientemente y n soluciones son seleccionadas de Et. SPEA y SPEA2 son excelentes algoritmos que usan una lista externa para almacenar las soluciones no-dominadas encontradas hasta el momento. Son además muy buenos ejemplos en el uso de poblaciones externas. Otros ejemplos de uso de poblaciones externas son PESA [Corne, Knowles et al., 2000], RDGA [Lu and Yen, 2002], RWGA [Ishibuchi and Murata, 1996] y DMOEA [Yen and Lu, 2003]. 2.3.5 – Manejo de restricciones La mayoría de los problemas de la vida real incluyen restricciones que deben ser satisfechas. Un excelente enfoque en el manejo de restricciones en los algoritmos evolutivos fue dado por Coello [Coello and Carlos, 1999]. Un AG de un solo objetivo tiene cuatro diferentes maneras de manejar las restricciones: (I) eliminando soluciones no factibles; (II) reduciendo la aptitud de soluciones no factibles usando una función de penalidad; (III) creando operadores genéticos para siempre producir soluciones factibles y (IV) transformando soluciones no factibles para hacerlas factibles. El manejo de restricciones no ha sido igualmente estudiado en los algoritmos multiobjetivos [Jimenez, GómezSkarmeta et al., 2002]. Mientras que las estrategias de manejo de las restricciones (I), (II), (III) y (IV) son directamente aplicables a los problemas de más de un objetivo, la implementación de estrategias con funciones de penalización no es sencilla debido a que el valor de aptitud depende del rango de no-dominancia de una solución, no en los valores de la función objetivo. Jiménez et al [Jimenez, Gómez-Skarmeta et al., 2002] propuso una estrategia basada en la selección del niched count el cual trabaja de forma correcta con la factibilidad de las soluciones mientras se logra mantener la diversidad en la poblaciones. La mayor desventaja es su complejidad computacional y los parámetros adicionales que necesita. Deb et al. [Deb, Pratap et al., 2002] propuso un concepto de dominancia de restricciones y un torneo binario de selección basado en el mismo llamado método de torneo de restricciones. Una solución x se dice que domina en restricciones a otra y si alguno de los siguientes casos es satisfecho: Caso 1: Solución x es factible y solución y no es factible. Caso 2: Solución x y y son las dos no factibles, sin embargo, x tiene una menor violación de las restricciones que y. Caso 3: Las dos soluciones son factible y la solución x domina a la solución y. En el método de torneo de restricciones, primero, los frentes no dominados por las restricciones F1, F2,…, FR son identificados de forma similar a la definida en [Goldberg, 1989], pero usando el criterio de dominancia de restricciones en vez del concepto normal. En la selección se eligen dos soluciones aleatoriamente de la población y se aplica el torneo binario, la ganadora es aquella que 24.
Figure

+6


Documento similar