Control predictivo multivariable y su eficacia en la optimización del clima de un Invernadero
116
0
0
Texto completo
(2) ii 2018. UNIVERSIDAD NACIONAL DE SAN AGUSTIN DE AREQUIPA ESCUELA DE POSGRADO. MAESTRIA EN INGENIERÍA ELECTRÓNICA MENCIÓN: AUTOMATIZACIÓN E INSTRUMENTACIÓN TESIS “CONTROL PREDICTIVO MULTIVARIABLE Y SU EFICACIA EN LA OPTIMIZACIÓN DEL CLIMA DE UN INVERNADERO”. PRESENTADA POR JUAN CARLOS MACHACA CUTIPA. PARA OPTAR EL GRADO ACADÉMICO DE MAGISTER EN INGENIERÍA ELECTRÓNICA. TESIS APROBADA POR:. PRESIDENTE DEL JURADO. :_Dr. RAUL SULLA TORRES. _. MIEMBRO DEL JURADO. :_Mg. HUGO RUCANO ALVAREZ. _. MIEMBRO DEL JURADO. :_Dr. MAXIMO AMANCIO MONTALVO ATCO. ASESOR DE TESIS. :_ Dr. MAXIMO AMANCIO MONTALVO ATCO.
(3) iii. DEDICATORIA. A mis hijos Carlos Fernando y Jean Carlos, fuente. de. inspiración y trabajo, mi esposa Zara Pamela, por todo su apoyo incondicional, mis padres Nicanor y Agripina, con mucho amor y gratitud por el incansable apoyo que me brindan en todo momento..
(4) iv. AGRADECIMIENTOS. . A DIOS por todo lo que me ha dado en esta vida.. . A mis hijos por estar a mi lado y ser el motor de mi vida.. . A mi esposa por su apoyo y comprensión.. . A mis padres por todo lo que me dieron y enseñaron en la Vida.. . A mi Abuelo Miguel Cutipa Astete por ser mi fuente de inspiración.. . A los amigos y familiares que me apoyaron en la elaboración de esta tesis..
(5) v. ÍNDICE CARÁTULA JURADOS Y ASESOR DEDICATORIA AGRADECIMIENTO ÍNDICE. v. RESUMEN. vii. ABSTRACT. viii. INTRODUCCIÓN. ix. CAPÍTULO I EL PROBLEMA 1.1. Exposición de la situación problemática. ................................................... 1 1.2. Planteamiento del problema. ..................................................................... 2 1.2.1. Problema general. ............................................................................ 2 1.2.2. Problemas específicos. .................................................................... 2 1.3. Justificación de la investigación. ............................................................... 2 1.4. Objetivos. .................................................................................................. 3 1.4.1. Objetivo general. .............................................................................. 3 1.4.2. Objetivos específicos. ...................................................................... 3. CAPÍTULO II MARCO TEÓRICO REFERENCIAL 2.1. Antecedentes de la investigación. ............................................................. 4 2.2. Marco teórico. ........................................................................................... 8 2.2.1. Control Predictivo. ............................................................................ 8 2.2.2. Teoría detrás del Control Predictivo. .............................................. 10 2.2.3. Estrategia de los controladores predictivos. ................................... 11 2.2.4. Elementos básicos de los controladores predictivos. ..................... 14.
(6) vi 2.2.5. Modelo de la predicción. ................................................................ 14 2.2.6. Función Objeto. .............................................................................. 19 2.2.7. La Ley de Control. .......................................................................... 22 2.2.8. Control Predictivo.Generalizado ..................................................... 23 2.2.9. Control Predictivo.Generalizado Multivariable ................................ 32 2.2.10. Invernaderos ................................................................................ 39 2.3. Hipótesis. ................................................................................................ 41 2.4.1. Hipótesis general. .......................................................................... 41 2.4.2. Hipótesis específicas. .................................................................... 41 2.4. Variables. ................................................................................................ 41 2.4.1. Variable independiente. ................................................................. 41 2.4.2. Variable dependiente. .................................................................... 41 2.5. Operaciónalización de variables. ............................................................. 42. CAPÍTULO III METODOLOGÍA DE LA INVESTIGACIÓN 3.1. Método de la investigación. ..................................................................... 44 3.2. Diseño de la investigación. ………………………………………………… ... 45 3.2.1. Modelo del Invernadero ................................................................. 45 3.2.2. Modelo Dinamico del Invernadero .................................................. 47 3.2.3. Proceso de Implementación del Controlador MPC ......................... 73 3.2.4. Proceso de Implementación del Controlador GPC ......................... 83 3.2.5. Proceso de Implementación del Controlador Multivariable ............. 91. CAPÍTULO VI RESULTADOS Y DISCUSIÓN 4.1. Conclusiones. ........................................................................................ 102 4.2. Sugerencias. ......................................................................................... 103. REFERENCIAS BIBLIOGRÁFICAS ANEXOS.
(7) vii. RESUMEN. Con el tiempo se están implementando invernaderos para la producción de productos agrícolas, pero debido a que estos no están automatizados, o no utilizan técnicas de control avanzado, es que aún no se obtienen productos de buena calidad y a gran escala.. El control y automatización de un invernadero es indispensable, para obtener una buena producción, así como productos de buena calidad, debido a que dentro del invernadero se puede controlar variables climáticas para que de esta forma los productos agrícolas que se obtengan sean mucho más y de mejor calidad. Es por eso que en estos tiempos el control y automatización de invernaderos utilizando diferentes técnicas de control son indispensables.. La utilización de un sistema de Control Predictivo es importante debido a que este sistema podrá predecir el comportamiento de las variables climáticas dentro de un invernadero y de este modo poder controlar las variables de salida y consecuentemente poder mejorar y optimizar el clima dentro de este. Con el sistema de Control Predictivo es posible predecir el clima dentro del invernadero y de este modo obtener un mejor producto cultivado de acuerdo al comportamiento de las variables como: temperatura, humedad relativa, velocidad de viento, etc..
(8) viii. ABSTRACT. Over time, greenhouses are being implemented for the production of agricultural products, but because these are not automated, or do not use advanced control techniques, good quality and large-scale products are still not obtained.. The control and automation of a greenhouse is essential, to obtain a good production of agricultural products, as well as products of good quality, because in the greenhouse you can control climatic variables so that the agricultural products obtained are much more and of better quality. That is why in these times the control and automation of greenhouses using different control techniques are essential.. The use of a Predictive Control system is important because this system can predict the behavior of climatic variables within a greenhouse and thus be able to control the output variables and consequently be able to improve and optimize the climate within this. With the Predictive Control system it is possible to predict the climate inside the greenhouse and in this way obtain a better product cultivated according to the behavior of the variables such as: temperature, relative humidity, wind direction, etc..
(9) ix INTRODUCCION. Se puede considerar que en la actualidad el objetivo de un sistema de control consiste en actuar sobre las variables manipuladas de forma que puedan satisfacer múltiples y cambiantes criterios de funcionamiento (económicos, de seguridad, medioambientales o de calidad) en presencia de cambios en las características del proceso. El amplio abanico de las metodologías actuales de control de procesos se enfrenta al cumplimiento de este objetivo. La diferencia entre las diversas técnicas radica básicamente en los compromisos hechos en la formulación matemática de los criterios de funcionamiento y en la elección de la forma de representar el proceso. La representación matemática de muchos de estos criterios se lleva a cabo en la forma de funciones objetivo dinámicas y de restricciones mientras que el proceso se representa como un modelo dinámico con incertidumbres asociadas. La importancia de las incertidumbres está asociado cada vez más reconocida y por tanto incluida explícitamente en la formulación de los controladores.. Las. técnicas. de. Control. Predictivo. parecen. constituir. poderosas. herramientas para afrontar estos retos. El control predictivo constituye un campo muy amplio de métodos de control desarrollados en torno a ciertas ideas comunes e integra diversas disciplinas como control óptimo, control estocástico, control de procesos con tiempos muertos, control multivariable o control con restricciones.. La optimización del clima de un invernadero depende mucho de las variables climáticas como temperatura, humedad relativa y el ingreso del viento, de acuerdo a las variaciones que se den con estas variables es posible obtener la cosecha de un mejor producto. En consecuencia, hoy en día se da mucha importancia a la gestión óptima de la producción en invernaderos para poder adoptar las medidas óptimas día a día. Es un gran estímulo ver como varía el beneficio de un sistema de producción a otro solo porque hay diferencias en las técnicas de gestión. Los más exitosos son los que utilizan técnicas de predicción y anticipación de las situaciones futuras que puedan ocurrir, con el fin de asegurar el buen funcionamiento de los sistemas de producción..
(10) x Con el avance tecnológico de la electrónica, las formas de controlar sistemas o procesos multivariables son más modernas, precisas, rápidas y óptimas. Esto trae consigo distintas técnicas de control moderno que se pueden implementar para poder modernizar estos procesos.. A pesar de que existen muchos invernaderos, estos no constan de un sistema de control avanzado para optimizar el clima interno, y si es que lo tienen los hacen únicamente con un control on/off para encender o apagar un calefactor o de forma manual para abrir o cerrar las ventanas del invernadero, por lo que actualmente para poder controlar los sistemas se está utilizando sistemas de control de tipo digital.. Para brindar una mejor producción en un invernadero se opta por implementar un sistema de control predictivo, debido a que la implementación de este tipo de control avanzado en muchísimos casos, los resultados que se obtienen son satisfactorios.. Por tanto en el presente trabajo se intenta precisar si efectivamente la implementación de un sistema de control predictivo optimiza el clima interno de un invernadero. De esta forma poner en evidencia empírica la teoría del sistema de control predictivo..
(11) 1. CAPÍTULO I EL PROBLEMA 1.1. EXPOSICIÓN DE LA SITUACIÓN PROBLEMATICA.. La utilización de un sistema de Control Predictivo es importante porque este sistema podrá predecir el comportamiento de las variables climáticas dentro de un invernadero y de este modo poder controlar las variables de salida y consecuentemente poder mejorar y optimizar el clima dentro de este.. El pronóstico del estado del clima dentro del invernadero es deficiente en muchas zonas de nuestra región ya que no se cuenta con sistemas automáticos que regulen y controlen el estado del clima en el interior del invernadero.. Con el sistema de Control Predictivo es posible predecir el clima dentro del invernadero y de este modo obtener un mejor producto cultivado de acuerdo al comportamiento de las variables como: temperatura, humedad relativa, dirección de viento, etc..
(12) 2 1.2. PLANTEAMIENTO DEL PROBLEMA.. 1.2.1. PROBLEMA GENERAL. Dada esta situación problemática el problema que da inicio a la siguiente investigación puede ser formulado por la siguiente pregunta:. ¿Es eficaz la utilización de las técnicas de Control Predictivo Multivariable en la optimización del clima de un Invernadero?. 1.2.2. PROBLEMAS ESPECÍFICOS. ¿Cuál es el grado de eficacia del Control Predictivo Multivariable en la optimización del clima de un invernadero?. ¿Es posible mejorar el nivel de producción agrícola en invernaderos que utilicen técnicas de Control Predictivo multivariable?. ¿Cómo influyen las técnicas de Control Predictivo multivariable en el clima de un invernadero?. 1.3. JUSTIFICACIÓN DE LA INVESTIGACIÓN.. Existen muchas regiones o localidades en nuestra región donde la producción agrícola se hace de forma artesanal, teniendo en cuenta únicamente las estaciones del año para la siembra y cosecha de los productos, esperando únicamente que la madre naturaleza se encargue de brindar una buena o mala cosecha, además de que en estos últimos años el clima ya no se comporta según las estaciones ya que podemos ver que en temporada de lluvias se presenta heladas, en temporada de verano está lloviendo. Es por eso que la producción de productos agrícolas está bajando cada vez más, así como la calidad de los productos son cada vez más bajos..
(13) 3 Con el tiempo se están implementando invernaderos para la producción de productos agrícolas, pero debido a que estos no están automatizados, o no utilizan técnicas de control avanzado, es que aún no se obtienen productos de buena calidad y a gran escala.. El control y automatización de un invernadero es indispensable, para obtener una buena producción de productos agrícolas, así como productos de buena calidad, debido a que dentro del invernadero se puede controlar variables climáticas para que de esta forma los productos agrícolas que se obtengan sean mucho más y de mejor calidad. Es por eso que en estos tiempos el control y automatización de invernaderos utilizando diferentes técnicas de control son indispensables.. 1.4. OBJETIVOS. 1.4.1. OBJETIVO GENERAL.. Implementar un algoritmo de control predictivo multivariable para la optimización del clima de un invernadero. 1.4.2. OBJETIVOS ESPECÍFICOS. . Identificar el grado de eficacia del Control Predictivo Multivariable en la optimización del clima de un invernadero.. . Implementar un algoritmo de control predictivo GPC MIMO (dos variables de entrada y dos variables de salida), para la optimización del clima de un invernadero.. . Explicar la influencia de las técnicas de Control Predictivo multivariable en el clima de un invernadero utilizando software de simulación..
(14) 4. CAPÍTULO II MARCO REFERENCIAL 2.1. ANTECEDENTES DE LA INVESTIGACIÓN Con el avance tecnológico de la electrónica, las formas de controlar sistemas o procesos son más modernas, precisas, rápidas y óptimas. Esto trae consigo distintas técnicas de control moderno que se pueden implementar para poder modernizar estos procesos.. A pesar de que existen muchos invernaderos, estos no constan de un sistema de control avanzado para mejorar la producción de los productos y/o optimizar el clima interno, y si es que lo tienen los hacen únicamente con un control on/off para encender o apagar un calefactor o de forma manual para abrir o cerrar las ventanas del invernadero, por lo que actualmente para poder controlar los sistemas se está utilizando sistemas de control de tipo digital.. Para brindar una mejor producción en un invernadero y optimizar el clima interno se opta por implementar un sistema de control predictivo multivariable, debido a que la implementación de este tipo de control avanzado en muchísimos casos, los resultados que se obtienen son satisfactorios..
(15) 5. Por tanto en el presente trabajo se intenta precisar si efectivamente la implementación de un sistema de control predictivo multivariable es eficaz en la optimización del clima en un invernadero. De esta forma poner en evidencia empírica la teoría del sistema de control predictivo multivariable.. TÍTULO:. “CONTROL PREDICTIVO GENERALIZADO. DE PROCESOS. INDUSTRIALES: FORMULACIONES APROXIMADAS“. AUTOR: Carlos Bórdons Alba. AÑO: 1994. CONCLUSIONES: Según Bórdons, C. (1994) afirma que “Los objetivos planteados al iniciar el presente trabajo final de carrera eran: Estudiar los diferentes desarrollos de controladores predictivos existentes para encontrar una formulación de los algoritmos de forma simplificada que permita una fácil aplicación a la mayoría de los procesos industriales. Buscar un desarrollo que combine la potencia de los controladores predictivos con la simplicidad y facilidad de sintonización de los controladores tradicionales PIDs. Estudiar la robustez del controlador predictivo para modelos sencillos cuando actúa en presencia de incertidumbres estructuradas y no estructuradas. Realizar diversas aplicaciones prácticas de las formulaciones realizadas, que permitan comprobar como una herramienta tan poderosa como el control predictivo puede ser aplicada en cualquier sistema de control”.. Se puede observar, que se ha propuesto una formulación de control predictivo generalizado. para. la. mayoría. de. procesos. industriales,. que. reduce. considerablemente las necesidades de cálculo asociada a este tipo de controladores.. Se ha estudiado la robustez de la técnica propuesta como paso previo a la aplicación en procesos reales, donde las incertidumbres pueden afectar a la estabilidad del bucle cerrado..
(16) 6 Los resultados anteriores se han comprobado experimentalmente en diversos procesos reales, mostrando la facilidad con que puede implantarse así como las buenas prestaciones y la robustez.. TÍTULO:. “IMPLEMENTACIÓN DE. UN PROTOTIPO. DE TUNEL. DE. CALENTAMIENTO PARA ANALIZAR EL COMPORTAMIENTO DEL CONTROL PREDICTIVO BASADO EN MODELO VS CONTROL PROPORCIONAL INTEGAL DERIVATIVO UTILIZANDO SOFTWRE LABVIEW“. AUTOR: Holger Cevallos Ulloa.. AÑO: 2009. CONCLUSIONES: Según Cevallos H. (2009) afirma que “los objetivos planteados al iniciar el presente trabajo final de carrera eran: Análisis comparativo del funcionamiento del control predictivo vs el control PID aplicados en un túnel de calentamiento. Implementación del circuito electrónico de control y fuerza. Desarrollo de un sistema de visualización y adquisición de datos. Implementación de estrategias de control MPC y PID mediante software”. Se verifica el comportamiento predictivo del controlador MBPC. La señal de control toma una acción antes de la variación del setpoint.. En el controlador PID la acción de control es más fuerte que la acción de control del controlador MPC. La pendiente de aproximación al setpoint de la variable controlada. En términos de error el controlador MPC presenta un menor error. El error del controlador PID es aproximadamente 5%superior al error del controlador MPC.. En promedio la señal de control requerida por el controlador MPC es menor a la requerida por el controlador PID. Esto significa un ahorro de energía para el.
(17) 7 caso de aproximadamente 3.5% que en términos económicos puede ser significativo.. TÍTULO: “APLICACIÓN DEL CONTROL PREDICTIVO MULTIVARIABLE A UNA COLUMNA DE DESTILACIÓN BINARIA“. AUTOR: Guillermo Valencia Palomo.. AÑO: 2006. CONCLUSIONES: Según Valencia G. (2006) indica que “el objetivo planteado al iniciar el presente trabajo final de carrera fue: Desarrollar un control predictivo multivariable para una columna de destilación binaria, con el fin de controlar las composiciones líquidas de los productos en el fondo y la salida del condensador”.. En el documento se presenta el estudio de la técnica de control predictivo desde sus elementos básicos y las alternativas que se utilizan en diferentes formulaciones. Se desarrolla un controlador predictivo en ambiente de simulink utilizando la formulación en espacio de estados, tomándose en consideración diferentes aspectos clave en estos controladores.. Se presentan 4 casos de estudio en donde el controlador se pone a prueba. En estos casos de precisan: (i) los efectos que tienen los parámetros de sintonía, (ii) el control con un modelo de predicción diferente a la planta, (iii) la incorporación de restricciones y (iv) un caso más complejo donde se controla una planta multivarible, de fase no mínima y operando cerca de las restricciones..
(18) 8 2.2. MARCO TEÓRICO. 2.2.1. CONTROL PREDICTIVO “Es una técnica avanzada de control de procesos que ha sido utilizado por la industria de procesos en plantas químicas y refinerías de petróleo desde la década los 80’. Recientemente ha sido utilizado en modelos de estabilidad para sistemas de potencia. Los controladores para este tipo de control dependen de modelos dinámicos del proceso en cuestión, más a menudo modelos lineales empíricos obtenidos por identificación de sistemas. La ventaja principal del MPC es el hecho de que permite que la ranura de tiempo inmediata sea optimizada, mientras tiene en cuenta también las ranuras de tiempo futuras. Esto se consigue optimizando un horizonte de tiempo finito, pero implementando únicamente la ranura de tiempo actual. El MPC tiene la capacidad de anticipar acontecimientos futuros y tomar acciones de control consecuentemente. Los controladores PID y LQR no poseen esta. característica. de. predicción.. El. MPC. implementa. casi. universalmente un sistema de control digital, a pesar de que actualmente se investiga sobre cómo lograr tiempos de respuesta más rápidos con circuitos análogos especialmente diseñados”. Áström, K (2000) Gavilán, F (2012) afirma que “los modelos usados en MPC generalmente se hacen con el fin de representar el comportamiento de sistemas dinámicos complejos. La complejidad adicional del algoritmo de control del MPC no es comúnmente necesitada, ni se recomienda su uso, para proveer sistemas que son simples de un control. adecuado:. estos. sistemas. pueden. ser. controlados. por controladores PID genéricos. Algunas particularidades dinámicas que son por ejemplo difíciles de controlar con PID son los retrasos en el tiempo de gran magnitud y los comportamientos dinámicos de alto orden”..
(19) 9 “Los modelos usados en MPC predicen los cambios en las variables dependientes del sistema y que a su vez son causados por cambios en (o dependen de) las variables independientes. En un proceso químico a manera de ejemplo, las variables independientes que pueden ser ajustadas por el controlador son a menudo los puntos de estabilidad [setpoints] de controles PID (presión, flujo, temperatura, etc.) o el elemento de control final (válvulas, amortiguadores, etc.). Además, las variables independientes que no pueden ser ajustadas por el controlador. son. consideradas. perturbaciones.. Las. variables. dependientes en estos procesos son otras medidas que son o permiten ver mejor algunos objetivos del control, o a veces son medidas de las restricciones en el proceso”. Gavilán, F (2012) Delgado L. (2017) indica que “El MPC utiliza las medidas de planta instantáneas, el estado dinámico actual del proceso, del modelo, los límites y las variables objetivo para calcular cambios futuros en las variables dependientes. Estos cambios se calculan para mantener las variables dependientes cerca al objetivo mientras se cumplen las restricciones en las variables tanto independientes como dependientes. El control MPC típicamente envía solo el primer cambio en cada variable independiente a ser implementado, y repite el cálculo cuándo el siguiente cambio es requerido”. “A pesar de que muchos procesos reales no son lineales, a menudo pueden ser considerados como tales para un rango de operación pequeño. Muchas veces se usan enfoques MPC lineales cuando el mecanismo de realimentación del compensador MPC presenta errores de predicción debido a un desajuste entre el modelo y el proceso. En controladores MPC que están compuestos únicamente por modelos lineales, el principio de superposición del álgebra lineal permite que el efecto de los cambios individuales en las variables independientes se puedan añadir unos con otros para predecir la respuesta de las variables dependientes. Esto simplifica el problema de control a una.
(20) 10 serie de cálculos de álgebra matricial directa que son rápidos y robustos”. Delgado L. (2017) Elkamel, A. (2012). Afirma “Cuando los modelos lineales no son lo suficientemente precisos como para representar las no linealidades del proceso real, varias otras aproximaciones pueden ser utilizadas. En algunos casos, las variables de proceso pueden ser transformadas antes y/o después que el modelo en sí mismo para reducir las nolinealidades. Además, el proceso puede ser controlado con MPC no lineal, cuyo modelo no lineal actúa directamente como la aplicación del control. El modelo no lineal puede existir en la forma de un ajuste de datos empíricos (p. ej. redes neuronales artificiales) o un modelo dinámico de alta fidelidad en términos de balance de energía y masa. El modelo no lineal puede ser linealizado para derivar en un Filtro de Kalman o para especificar un modelo para control MPC lineal. Un estudio algorítmico realizado por El-Gherwi, Budman, y El Kamel muestra que usar un enfoque de modelo dual puede proporcionar reducción significativa en las computaciones online necesarias mientras. mantiene. un. rendimiento. comparable. al. de. una. implementación sin alterar. El algoritmo propuesto soluciona N problemas de optimización convexa en paralelo con base en un intercambio de información entre controladores”.. 2.2.2. TEORÍA DETRÁS DEL CONTROL PREDICTIVO “MPC tiene sus bases en la optimización iterativa y de horizonte finito de un modelo de planta. En el tiempo t el estado actual de la planta es muestreado y una estrategia de control que minimice el costo es computada (a través de un algoritmo de minimización numérica) para un. horizonte. de. tiempo. a. futuro. relativamente. corto.. Específicamente, se usa un cálculo online o sobre la marcha para explorar trayectorias de estado que surjan del estado actual y para encontrar (vía la solución de ecuaciones de Euler-Lagrange) una estrategia de control con minimización de costos hasta el tiempo. Sólo.
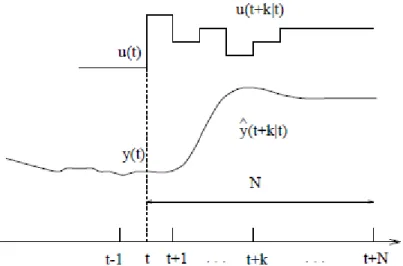
(21) 11 el primer paso de la estrategia de control es implementado, entonces el estado de la planta es muestreado nuevamente y todos los cálculos se repiten con base en el nuevo estado actual, dando lugar a un nuevo control y nuevas predicciones en la trayectoria de estado. El horizonte de predicción es siempre actualizado hacia adelante y por esta razón el MPC es también llamado control de horizonte errante. A pesar de que este enfoque no es óptimo, ha ofrecido muy buenos resultados. Se han realizado muchas investigaciones académicas para encontrar métodos rápidos de solución de ecuaciones tipo Euler-Lagrange, para entender las propiedades de estabilidad global de la optimización local en MPC. En buena medida los teóricos han estado intentando ponerse al corriente con respecto a los ingenieros de control cuando se habla de MPC”. Zambelli (2016). 2.2.3. ESTRATEGIA DE LOS CONTROLADORES PREDICTIVOS. La metodología de todos los controladores pertenecientes a la familia del MPC se caracteriza por la estrategia siguiente, representada en la figura 2.1. . En cada instante t y usando el modelo del proceso se predicen las salidas futuras para un determinado horizonte N, llamado horizonte de predicción. Estas salidas predichas, yˆ (t k / t ) para k=1 … N dependen de los valores conocidos hasta el instante t (entradas y salidas pasadas) y de las señales de control futuras. u(t k / t ), k 0...N 1 que se pretenden mandar al sistema y que son las que se quieren calcular..
(22) 12. Fig. 2.1. Estrategia del control predictivo . “El conjunto de señales de control futuras se calcula optimizando un determinado criterio en el que se pretende mantener el proceso lo más próximo posible a la trayectoria de referencia w(t k ) (que puede ser directamente el setpoint o una suave aproximación a éste). Este criterio suele tomar la forma de una función cuadrática de los errores entre la salida predicha y la trayectoria de referencia también predicha, incluyendo en muchos casos el esfuerzo de control. Si el criterio es cuadrático, el modelo lineal y no existen restricciones se puede obtener una solución explicita, en otro caso se debe usar un método iterativo de optimización. Adicionalmente se hace alguna suposición sobre la estructura de la ley de control futura, como por ejemplo que va a ser constante a partir de cierto instante”. Cevallos O. (2009) . Cevallos O. (2009) afirma también “La señal de control. u(t / t ) es enviada al proceso mientras que las siguientes señales de control calculadas son desechadas, puesto que en el siguiente instante de muestreo ya se conoce y (t 1) y se repite el paso 1 con este nuevo valor y todas las secuencias son actualizadas. Se calcula por tanto u(t 1/ t 1) (que en principio será diferente al. u(t 1/ t ) al disponer de nueva información), haciendo uso del.
(23) 13 concepto de horizonte deslizante. Para llevar a cabo esta estrategia, se usa una estructura como la mostrada en la figura 2.2. Se hace uso de un modelo para predecir las salidas futuras del proceso, basándose en las futuras señales de control propuestas. Estas señales son calculadas por el optimizador teniendo en cuenta la función de coste (donde aparece el futuro error de seguimiento) así como las restricciones. Por tanto el modelo juega un papel decisivo en el controlador. El modelo elegido debe ser capaz de capturar la dinámica del proceso para poder predecir las salidas futuras al mismo tiempo que debe ser sencillo de usar y de comprender”.. Fig. 2.2. Estructura básica del MPC “El optimizador es otra parte fundamental de la estrategia pues proporciona las acciones de control. Si la función de coste es cuadrática, el mínimo se puede obtener como una función explícita de las entradas y salidas pasadas y de la trayectoria de referencia. Sin embargo, cuando existen restricciones de desigualdad la solución debe ser calculada por métodos numéricos con más carga de cálculo”. Cevallos O. (2009).
(24) 14 2.2.4. ELEMENTOS. BÁSICOS. DE. LOS. CONTROLADORES. PREDICTIVOS. Todos los controladores predictivos poseen elementos comunes y para cada uno de estos elementos se pueden elegir diversas opciones, dando lugar a distintos algoritmos Estos elementos son: . Modelo de predicción. . Función Objetivo. . Obtención de la Ley de control.. 2.2.5. MODELO DE LA PREDICCIÓN. Acosta A. (2015) afirma que “La piedra angular del MPC es el modelo; un diseño completo debe incluir los mecanismos necesarios para la obtención del mejor modelo posible, el cual debe ser lo suficientemente rico para capturar al máximo la dinámica del proceso y debe ser capaz de permitir el cálculo de las predicciones a la vez que sea intuitivo y permita un análisis teórico. El uso del modelo del proceso viene determinado por la necesidad del cálculo de la salida predicha en instantes futuros yˆ (t k / t ) . Las diferentes estrategias de. MPC. pueden usar distintos modelos para representar la relación. de las salidas con las entradas medibles, algunas de las cuales serán variables manipuladas y otras se pueden considerar como perturbaciones medibles, que pueden ser compensadas por acción feedforward. Además se tendrá en cuenta un modelo de las perturbaciones, para intentar describir el comportamiento que no aparece reflejado en el modelo del proceso, englobándose aquí el efecto de las entradas no medibles, el ruido y los errores de modelado”.. Para el estudio se puede separar el modelo en dos partes: el modelo del proceso propiamente dicho y el modelo de las perturbaciones..
(25) 15 Cualquier método usara ambas partes para la predicción.. 2.2.5.1.. MODELO DEL PROCESO. En todas las formas posibles de modelar un proceso emergen en alguna formulación de MPC siendo las más usadas las siguientes: . Respuesta. impulsional.. También. conocida. por. secuencia de ponderación o modelo de convolución. La salida viene relacionada con la entrada por la siguiente ecuación. . y(t ) hi u(t i) i 1. Donde hi son los valores muestreados obtenidos al someter al proceso aun impulso unitario de amplitud igual al periodo de muestreo. Esta suma es truncada y sólo se consideran N valores (por tanto sólo permite representar procesos estables y sin integradores), teniendo N. y(t ) hi u(t i) H ( z 1 )u(t ). (2.1). i 1. donde. H ( z 1 ) h1 z 1 h2 z 2 ... hN z N .. Un. inconveniente de este método es el gran número de parámetros que necesita, ya que N suele ser un valor elevado del orden de 40-50). La predicción vendrá dada por: N. yˆ (t k / t ) hi u(t k i / t ) H ( z 1 )u(t k / t ) i 1.
(26) 16 Este método es ampliamente aceptado en la práctica industrial debido a que es muy intuitivo y no requiere información previa sobre el proceso, con lo que el procedimiento de identificación se simplifica, a la vez que permite describir fácilmente dinámicas complejas como fase no mínima o retardos. . Respuesta ante escalón. Es muy similar al anterior sólo que ahora la señal de entrada es un escalón. Para sistemas estables se tiene la respuesta truncada que será. N. y(t ) y0 g i u(t i) y0 G( z 1 )(1 z 1 )u(t ) i 1. donde las gi son los valores muestreados ante la entrada en escalón y u(t ) u(t ) u(t 1) , según se muestra en la figura 2.3b. El valor de y0 puede tomarse 0 sin pérdida de generalidad, con lo cual el predictor será: N. yˆ (t k / t ) g i u(t k i / t ) i 1. Este método presenta las mismas ventajas e inconvenientes que el anterior.. (2.2).
(27) 17. Fig. 2.3 Respuesta impulsional y ante escalón . Función de transferencia. Se utiliza el concepto. de función de transferencia G=B/A con lo que la salida viene dada por:. A( z 1 ) y(t ) B( z 1 )u(t ) A( z 1 ) 1 a1 z 1 a2 z 2 ... ana z na B( z 1 ) b1 z 1 b2 z 2 ... bnb z nb. Por tanto la predicción vendrá dada por. B( z 1 ) yˆ (t k / t ) u (t k / k ) A( z 1 ). 2.2.5.2.. MODELO DE LAS PERTURBACIONES. El modelo utilzado en el Autorregresivo Integrado de Media Móvil (Auto-Regressive and Integrated Moving Average, ARIMA), en el que las diferencias entre la salida medida y la calculada por el modelo vienen dadas por:. n(t ) . C ( z 1 )e(t ) D( z 1 ).
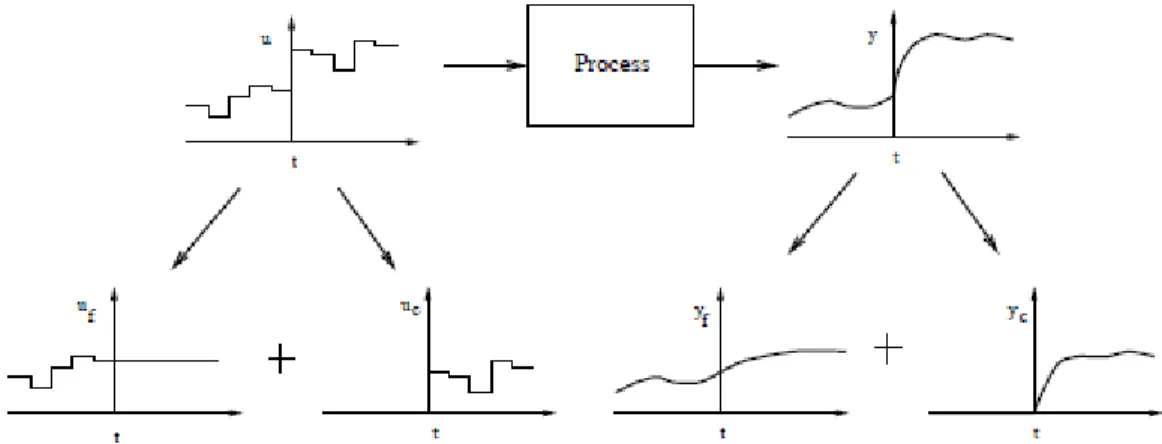
(28) 18. Donde:. D( z 1 ) incluye explícitamente el integrador 1 z 1 .. e(t ) es un ruido de media cero y normalmente el polinomio C se considera igual a uno.. Como caso particular del ARIMA se puede incluir la perturbación constante. n(t ) . e(t ) D( z 1 ) 1 1 z. Cuya mejor predicción será: nˆ(t k / t ) n(t ). 2.2.5.3.. RESPUESTA LIBRE Y FORZADA. Una característica típica de la mayoría de los controladores MPC es el empleo de los conceptos de repuesta libre y forzada. La idea es expresar la secuencia de acciones de control como la suma de dos señales: u(t ) u f (t ) uc (t ). La señal u f (t ) corresponde a las entradas pasadas (anteriores al instante t) y en el futuro se mantiene constante e igual al último valor de la variable manipulada. Es decir, u f (t j) u(t j) para j 1,2,.... u f (t j) u(t j) para j 0,1,2,..... La señal u c (t ) vale cero en el pasado y corresponde a las señales de control en los instantes futuros:. u c (t j ) 0 para j 1,2,.....
(29) 19. u c (t j ) u(t j ) u(t 1) para j 0,1,2,.... Según Bordons C. (2000) “La predicción de la secuencia se salida se separa en dos partes, como se ve en la figura 2.4. Una de ellas (yf(t)), la respuesta libre, corresponde a la predicción de la salida cuando la variable manipulada se hace igual uf(t), y la otra, la repuesta forzada (yc(t)), corresponde a la predicción de la salida cuando la señal de control es uc(t). La respuesta libre corresponde a la evolución del proceso debido a su estado actual (incluido por tanto el efecto de acciones pasadas) mientras que la respuesta forzada es la debida a las acciones de control futuras”.. Fig. 2.4. Respuesta Libre y Forzada. 2.2.6. FUNCIÓN OBJETO. Los diversos algoritmos de MPC proponen distintas funciones de coste para la obtención de la ley de control. En general se persigue que la salida futura en el horizonte considerado siga a una determinada señal de referencia al mismo tiempo que se puede penalizar el esfuerzo de control requerido para hacerlo. La expresión general de tal función objetivo será:.
(30) 20. J ( N1 , N 2 , N u ) . N2. Nu. j N1. j 1. ( j)yˆ (t j / t ) w(t j)2 ( j)u(t j 1)2. (2.3). En la función de coste se pueden considerar: N1 y N2 son los horizontes mínimo y máximo de la función de costo (o de predicción) y Nu es el horizonte de control, que no tiene por qué coincidir con el horizonte máximo. El significado de los horizontes N1 y N2 resulta bastante intuitivo por que marcan los límites de los instantes en que se desea que la salida siga a la referencia. Nótese que para procesos con tiempo muerto d, no tiene sentido que N1 sea menor que dicho valor puesto que la salida no empezará evolucionar hasta el instante t+d. Además, si el proceso es de fase no mínima, este parámetro permite eliminar de la función objetivo los primeros instantes de respuesta inversa. Los coeficientes ( j ) y λ(j) son secuencias que ponderan el comportamiento futuro. Usualmente se consideran valores constantes o secuencias exponenciales. Por ejemplo se puede conseguir un peso exponencial de ( j ) a lo largo del horizonte usando:. ( j) N. 2. j. Calderón J. (2009) afirma que “una de las ventajas del control predictivo es que si se conoce a priori la evolución futura de la referencia, el sistema puede empezar a reaccionar antes de que el cambio se haya efectivamente realizado, evitando los efectos del retardo en la respuesta del proceso. En muchas aplicaciones la evolución futura de la referencia r(t k ) es conocida de antemano, como en Robótica, servos o procesos en batch; en otras aplicaciones aunque la referencia sea constante, se puede conseguir una sensible mejora de prestaciones simplemente conociendo el instante de cambio de valor y adelantándose a esa circunstancia. En el criterio de minimización, la.
(31) 21 mayoría de los métodos suelen usar una trayectoria de referencia. w(t k ) que no tiene por qué coincidir con la referencia real. Normalmente será una suave aproximación desde el valor actual de la salida y(t ) a la referencia conocida mediante un sistema de primer orden”. w(t ) y(t ). w(t k ) w(t k 1) (1 )r(t k ). k 1...N. (2.4). “α es un parámetro comprendido entre 0 y 1 (mientras más próximo a 1 más suave será la aproximación) que constituye un valor ajustable que influirá en la respuesta dinámica del sistema. En la figura 2.5 se muestra la forma de la trayectoria cuando la referencia r(t k ) es constante y para dos valores distintos de α; para valores pequeños de este parámetro se tiene un seguimiento rápido (w1) mientras que si aumenta, la trayectoria de referencia será w2 dando lugar a una respuesta más suave”. Calderón J. (2009).. r(t+k) W 1 (t+k) W 2 (t+k) y(t). t Fig. 2.5 Trayectoria de referencia En la práctica, todos los procesos están sujetos a restricciones. Los actuadores tienen un campo limitado de acción así como una determinada velocidad de cambio (slew rate), como es el caso de las válvulas, limitadas por las posiciones de totalmente abierta o cerrada y por la velocidad de respuesta. Razones constructivas, de seguridad o medioambientales o bien los propios alcances de los sensores pueden.
(32) 22 causar límites en las variables de proceso, tales como niveles en depósitos, caudales en tuberías o temperaturas y presiones máximas. Además, normalmente las condiciones de operación vienen definidas por. la. intersección. de. ciertas. restricciones. por. motivos. fundamentalmente económicos, con lo que el sistema de control operará cerca de los límites. Todo lo expuesto anteriormente hace necesaria la introducción de restricciones en la función a minimizar.. Muchos algoritmos predictivos tienen en cuenta el tema de las restricciones por lo cual han tenido gran éxito en la industria. Normalmente se considerarán límites en la amplitud y el slew rate de la señal de control y límites en las salidas:. u min u(t ) u max. t. du min u(t ) u(t 1) du max y min y(t ) y max. t. t. con la adición de estas restricciones a la función objetivo, la minimización resulta más compleja, no pudiendo obtenerse la solución analíticamente como en el caso sin restringir.. 2.2.7. LA LEY DE CONTROL Para obtener los valores u(t k / t ) será necesario minimizar la funcional J de la ecuación (2.3). Para lo cual se calculan los valores de las salidas predichas yˆ (t k / t ) en función de valores pasados de entradas y salidas y de señales de control futuras, haciendo uso del modelo que se haya elegido y se sustituyen en la función de coste, obteniendo una expresión cuya minimización conduce a los valores buscados. Para el criterio cuadrático si el modelo es lineal y no existen restricciones se puede obtener una solución analítica, en otro caso se debe usar un método iterativo de optimización..
(33) 23 De cualquier manera la obtención de la solución no resulta trivial pues existirán N 2 N1 1 variables independientes, valor que puede ser elevado (del orden de 10 a 30). Con la idea de reducir estos grados de libertad se puede proponer cierta estructura a la ley de control. Además se ha encontrado que esta estructuración de la ley de control produce una mejora en la robustez y en el comportamiento general del sistema, debido fundamentalmente a que el hecho de permitir la libre evolución de las variables manipuladas (sin estructurar) puede conducir a señales de control de alta frecuencia no deseables y que en el peor de los casos podrían conducir a la inestabilidad.. Esta estructura de la ley de control se plasma en el uso del concepto de horizonte de control (Nu), que consiste en considerar que tras un cierto intervalo N u N 2 no hay variación en las señales de control propuestas, es decir:. u(t j 1) 0. j Nu. lo cual es equivalente a dar pesos infinitos a las cambios en el control a partir de cierto instante. El caso límite sería considerar Nu igual a 1 con lo que todas las acciones futuras serían iguales a u(t ) .. 2.2.8. CONTROL PREDICTIVO GENERALIZADO Bordons C. (2000) nos indica que “el Control Predictivo Generalizado GPC fue propuesto por Clarke et al. en 1987 y se ha convertido en uno de los métodos más populares en el ámbito del Control Predictivo tanto en el mundo industrial como en el académico. Se ha empleado con éxito en numerosas aplicaciones industriales, mostrando buenas prestaciones a la vez que un cierto grado de robustez respecto a sobre parametrización o retardos mal conocidos. Puede resolver muchos problemas de control diferentes para un amplio campo de procesos con un número razonable de variables de diseño, que son.
(34) 24 especificadas por el operario dependiendo del conocimiento previo del proceso y de los objetivos de control”. “La idea básica del GPC es calcular una secuencia de futuras acciones de control de tal forma que minimice una función de coste multipaso. El índice a minimizar es una función cuadrática que mide por un lado la distancia entre la salida predicha del sistema y una cierta trayectoria de referencia hasta el horizonte de predicción, y por otro el esfuerzo de control necesario para obtener dicha salida” Bordons C. (2000).. El Control Predictivo Generalizado tiene muchas ideas en común con otros controladores predictivos previamente mencionados ya que está basado en las mismas ideas pero posee a su vez algunas diferencias. Como se verá más adelante, es capaz de proporcionar una solución explícita (en ausencia de restricciones), puede trabajar con procesos inestables o de fase no mínima e incorpora el concepto de horizonte de control así como la consideración en la función de coste de ponderación de los incrementos en las acciones de control. Las diversas posibilidades disponibles para el GPC conducen a una gran variedad de objetivos de control comparado con otras realizaciones, algunas de las cuales pueden ser consideradas como subconjuntos o casos límites del GPC. Clarke E. (1987). 2.2.8.1. Función de Control Predictivo Generalizado Bordons C. (2000) afirma que “La mayoría de los procesos de una sola entrada y una sola salida (single-input single-output, SISO), al ser considerados en torno a un determinado punto de trabajo y tras ser linealizados, pueden ser descritos de la siguiente forma”:. . . . A z 1 yt z d B z 1 ut 1 C z 1 et .
(35) 25 donde ut y yt son respectivamente la señal de control y la salida del proceso y et es un ruido blanco de media cero. A, B y C son los siguientes polinomios en el operador de desplazamiento hacia atrás z 1 :. Az 1 1 a1 z 1 a2 z 2 ... ana z na. Bz 1 b0 b1 z 1 b2 z 2 ... bnb z nb. C z 1 1 c1 z 1 c2 z 2 ... cnc z nc donde d es el tiempo muerto del sistema. Este modelo es conocido como Autorregresivo de Media Móvil (Controller Auto- Regressive Moving-Average CARMA). En muchas aplicaciones industriales en las que las perturbaciones son no-estacionarias resulta más conveniente el uso de un modelo CARIMA integrado, dando lugar al CARIMA, que viene descrito por:. . . et . A z 1 yt B z 1 z d ut 1 C z 1. con 1 z 1. (2.5). Por simplicidad, a partir de ahora el polinomio C se va a tomar igual a 1. Nótese que en el caso de que C 1 pueda ser truncado se puede absorber en A y B.. El algoritmo del Control Predictivo Generalizado consiste en aplicar una secuencia de señales de control que minimice una función de coste de la forma:. J N1 , N 2 , Nu . N2. Nu. j N1. j 1. j yˆ t j / t wt j 2 j ut j 12. (2.6). donde yˆ t j / t es la predicción óptima j pasos hacia delante de la salida del proceso con datos conocidos hasta el instante t, N1.
(36) 26 y N2 son los horizontes mínimo y máximo de coste, Nu es el horizonte de control y δ j y. λ j son las secuencias de. ponderación mientras que wt j es la futura trayectoria de referencia. En muchas situaciones se considera δ j igual a 1 y. λ j constante. El objetivo es pues el cálculo de la futura secuencia de control. ut , ut 1 ,... de tal manera que la salida futura del proceso yt j permanezca próxima a. wt j . Esto se logra. minimizando J N1 , N 2 , Nu .. 2.2.8.2. Predicción Óptima. Con el objetivo de minimizar la función de coste, se obtendrá previamente la predicción óptima de yt j para J N1 y. J N 2 Considérese la siguiente ecuación diofántica:. . . 1 E j z 1 ΔA z j Fj z 1. . . ~ z j F z 1 1 E j z 1 A j. (2.7). Los polinomios E j y F j están únicamente definidos con grados. j 1 y na respectivamente. ~ Se pueden obtener dividiendo 1 entre Az 1 hasta que el resto. . pueda ser factorizado como z j F j z 1 . El cociente de la división. . es entonces el polinomio E j z 1 .. . Si se multiplica la ecuación (2.5) por E j z 1 z j Δ.
(37) 27. . . . ~ z 1 E z 1 yt j E z 1 B z 1 ut j d 1 E z 1 et j A j j j. (2.8). teniendo en cuenta (2.7) la ecuación (2.8) queda:. 1 z. j. . . . Fj z 1 yt j E j z 1 B z 1 ut j d 1 E j z 1 et j . (2.9). Lo cual puede escribirse como:. . . . yt j Fj z 1 yt E j z 1 B z 1 ut j d 1 E j z 1 et j . (2.10). . al ser el grado del polinomio E j z 1 igual a j 1 los términos del ruido en la ecuación (2.10) están todos en el futuro. La mejor predicción de yt j será por consiguiente:. . . yˆ t j / t G j z 1 ut j d 1 Fj z 1 yt . . . donde G j z 1 E j z 1 B z 1. Resulta simple demostrar que los polinomios E j y F j se pueden obtener recursivamente, de forma que los nuevos valores en el paso. j 1E j 1 y Fj 1 sean función de los del paso j. A. continuación se muestra una demostración simple de la recursividad. de. la. ecuación. diofántica.. Existen. otras. formulaciones del GPC que no están basadas en la recursividad de esta ecuación..
(38) 28 Considérense que los polinomios E j y F j se han obtenido ~ dividiendo 1 entre Az 1 hasta que el resto haya sido factorizado. . como z j F j z 1 Con:. E z e. F j z 1 f j ,0 f j ,1 z 1 ... f j ,na z na 1. j. j ,0. e j ,1 z 1 ... e j , j 1 z ( j 1). Supóngase que se utiliza el mismo procedimiento para obtener ~ E j 1 y F j 1 , es decir, dividir 1 entre Az 1 hasta que el resto se. . pueda factorizar como z j 1 F j 1 z 1 con. . Fj 1 z 1 f j 1,0 f j 1,1 z 1 ... f j 1,na z na. Está claro que solamente es necesario dar un paso más en la división para obtener los polinomios E j 1 y F j 1 . Al ser E j 1 el nuevo cociente de la división, será igual al cociente que había hasta el momento (Ej) más un nuevo término, que será el f j ,0. . ~ pues el divisor A es mónico. Por tanto:. . . E j 1 z 1 E j z 1 e j 1, j z j. con. e j 1, j f j ,0. Teniendo en cuenta que el nuevo resto será el resto anterior menos el producto del cociente por el divisor, los coeficientes del polinomio F j 1 se pueden expresar como: ~ f j 1,i f j ,i1 f j ,0 a i 1. i 0... na. El polinomio G j 1 puede ser obtenido recursivamente como sigue:. . . G j 1 E j 1 B E j f j ,0 z j B G j f j ,0 z j B.
(39) 29 Es decir, los primeros j coeficientes de G j 1 serán idénticos a los de G j mientras que el resto viene dado por: g j 1, j i g j , j i f j ,0bi. para i 0... nb. Para resolver el GPC es necesario obtener el conjunto de señales de control ut , ut 1 , ... , ut N que minimizan la ecuación (2.6). Al tener el proceso un retardo de d períodos de muestreo, la salida sólo se verá influenciada por la señal ut después del instante d+1. Los valores N1 , N 2 y Nu que marcan los. horizontes. pueden. ser. definidos. como. N1 d 1 ,. N 2 d N y Nu N . No tiene sentido hacer N1 d 1 ya que los términos de (3.2) sólo dependerán de las señales de control pasadas. Por otro lado, haciendo N1 d 1 los primeros puntos de la secuencia de salida, que serán los mejor estimados, no se tendrán en cuenta.. El conjunto de las j predicciones óptimas:. yˆ t d 1 / t Gd 1ut Fd 1 yt yˆ t d 2 / t Gd 2 ut 1 Fd 2 yt yˆ t d N / t Gd N ut N 1 Fd N yt . puede ser escrito de forma matricial como:. . . y Gu F z 1 yt G´ z 1 ut 1. (2.11).
(40) 30 donde. yˆ t d 1 / t yt d 2 / t ˆ y yˆ t d N / t . ut ut 1 u ut N 1. g0 g G 1 g N 1. . G´ z 1. 0 0 g 0 0 g N 2 g 0 . . . . z Gd 1 z 1 g 0 z 2 Gd 2 z 1 g 0 g1 z 1 N 1 1 N 1 z Gd N z g 0 g1 z g N 1 z. . . . . . F z 1. . . . Fd 1 z 1 F z 1 d 2 1 Fd N z. . . Al depender los últimos términos de la ecuación (2.11) sólo del pasado, pueden agruparse en f, dando lugar a:. y Gu f. (2.12). Obsérvese que es la misma expresión que se obtuvo para el DMC, aunque en este caso la respuesta libre es distinta.. 2.2.8.3. Ley de Control. La ecuación (2.6) se puede reescribirse de la siguiente manera: J Gu f w Gu f w uT u T. (2.13).
(41) 31 donde: w wt d 1 wt d 2 wt d N . T. (2.14). la ecuación (2.13) se puede expresar como:. 1 J u T Hu bu f 0 2. (2.15). donde:. . H 2 G T G λI b 2f w G. . T. f 0 f w f w T. El mínimo de J, siempre que no existan restricciones en la señal de control, puede ser calculado igualando a cero el gradiente de J, lo cual conduce a:. u H 1bT. (2.16). Debido al uso de la estrategia deslizante, sólo se aplica realmente el primer elemento del vector u, repitiendo de nuevo el mismo procedimiento al siguiente instante de muestreo. La solución propuesta involucra la inversión (o al menos la triangularización) de una matriz de dimensión NxN, lo cual conlleva una gran carga de cálculo. El concepto ya usado en otros métodos de horizonte de control se emplea con la finalidad de reducir la cantidad de cálculo, asumiendo que las señales de control permanecerán en un valor constante a partir del intervalo Nu < N. Por tanto la dimensión de la matriz que hay que invertir queda reducida a Nu x Nu, quedando la carga de cálculo reducida (en el caso límite de Nu = 1, se reduce al caso escalar) aunque restringiendo la optimalidad..
(42) 32 2.2.9. CONTROL PREDICTIVO GENERALIZADO MUTIVARIABLE. Los Controladores Predictivos Basado en Modelo (GPC) son utilizados para controlar procesos multivariables o por sus siglas en ingles MIMO (Multi-Input Multi-Output). Una representación básica en diagrama de bloques para un sistema MIMO 2×2 puede verse en la figura 2.6.. 2.2.9.1. CONTROL PREDICTIVO GENERALIZADO MUTIVARIABLE Según Castaño S. (2017) indica que “el Control Predictivo Generalizado Multivariable: . No se preocupa por realizar desacoplo de variables ya que trata el problema de forma general. . Se deben escoger adecuadamente los pares entrada-salida (Una técnica para decidir esto es la matriz RGA). . Es importante escalar adecuadamente TODAS las variables del sistema, debido a que normalmente se trabaja con distintas variables (Temperatura, Presión, Nivel, Flujo, etc)”.
(43) 33 2.2.9.2. FUNCION OBJETIVO “La función objetivo viene siendo igual a como hemos venido trabajando en el caso SISO. Donde se tiene el seguimiento de referencia y las acciones de control, todo eso ponderado. La diferencia es que ahora las ponderaciones no son escalares, dado a que tengo más de una variable en mi sistema. Y para cada salida voy a tener horizontes diferentes”. Castaño S. (2017) 𝑁2. 𝑁3. 𝐽 = ∑ ‖𝑦̂(𝑡 + 𝑘 ) − 𝑤(𝑡 + 𝑘). ‖2. 𝑄1 + ∑‖Δ𝑢(𝑡 + 𝑘 − 1)‖2 𝑄2. 𝐾=𝑁1. 𝑘=1. ‖𝑋‖2𝑄1 = 𝑋 𝑇 𝑄1 𝑋. “Para cada salida tenemos diferentes horizontes, suponiendo a modo de ejemplo que tengo dos salidas (y1 que va desde el horizonte N11 hasta N12) y (y2 que va desde el horizonte N21 hasta N22). Mi matriz de predicciones “y” va a contener las dos salidas, es decir que la salida estará dividida por sectores y que para cada sector voy a tener que ponderar de forma diferente, quiere decir que mi vector de ponderación también estará dividido por sectores”: Castaño S. (2017).
(44) 34 Y se hace exactamente lo mismo con las ponderaciones y con el vector del incremento de control, el cual también estará dividido por sectores:. En forma general de la función objetivo podemos ver que los tamaños de cada vector o matriz viene dado por: 𝑁2. 𝑁3. 𝐽 = ∑ ‖𝑦̂(𝑡 + 𝑘 ) − 𝑤(𝑡 + 𝑘)‖2 𝑄1 + ∑‖Δ𝑢(𝑡 + 𝑘 − 1)‖2 𝑄2 𝐾=𝑁1. 𝑘=1. “Para montar la matriz de coeficientes del sistema, se deben dejar todas las entradas del sistema constantes y aplicar un escalón únicamente en una entrada y ver como se comporta cada una de las salidas del sistema. Para la primera variable manipulada podría calcular los primeros sectores de la matriz G”. Castaño S. (2017).
(45) 35. Castaño S. (2017) afirma que “la estructura de nuestro modelo MIMO expresado en su forma CARIMA es”: 𝑦(𝑡) = 𝑃 (𝑧 −1 )𝑢(𝑡) Donde “y” son las salidas, “P” es la función de transferencia MIMO y “u” son las entradas. Cada función de transferencia que conforma el elemento “P” podría expresarse de la siguiente manera: ′ 𝑧 −1 𝐵𝑖𝑗 (𝑧 −1 ) −𝑑 𝑝𝑖𝑗 = 𝑧 𝑖𝑗 𝐴𝑖𝑗 (𝑧 −1 ). Castaño S. (2017) afirma que “como es un sistema MIMO, es muy probable que cada una de las funciones de transferencia presentan retardos diferentes. Por eso lo más conveniente es tomar para cada salida del sistema MIMO (Cada fila de la matriz P) el mínimo retardo que se presente en esa salida (esa fila)”. 𝑑𝑗 = 𝑚𝑖𝑛[𝑑𝑖𝑗 ]. El retardo mínimo de cada salida agrupado en la diagonal principal de otra matriz, es: 𝑃 (𝑧 −1 ) = 𝐷(𝑧 −1 )𝐺(𝑧 −1 ). Donde: P: es la matriz de transferencia D: es la matriz con los retardos mínimos. G: es la matriz de transferencia que contiene los retardos efectivos del sistema..
(46) 36. “Ahora se debe aplicar el mismo procedimiento que se aplica en el caso de las perturbaciones. Si analizamos bien el problema, veremos que el sistema MIMO es un sistema que presenta interacciones entre variables y que cada interacción, nosotros podríamos considerarla como si fuera una perturbación medible. Osea que podríamos pensar en un desacoplo por FeedForward. Entonces aplicando el mismo concepto, debemos obtener el mínimo común múltiplo de cada salida”. Castaño S. (2017) “Con el mínimo común múltiplo, pasamos a calcular los nuevos polinomios “B” los cuales incluirán los retardos efectivos. Por lo que podemos recudir el problema a la solución de varias ecuaciones MISO (Multi-Input Single-Output) o sea múltiples entradas y una sola salida, lo cual es mucho más sencillo de calcular”. Castaño S. (2017) 𝐴1 (𝑧 −1 )𝑦(𝑡) = [𝐵11 (𝑧 −1 )𝑢1 (𝑡 − 1) + 𝐵12 (𝑧 −1 )𝑢2 (𝑡 − 1)] 𝐴2 (𝑧 −1 )𝑦(𝑡) = 𝑧 −1 [𝐵21 (𝑧 −1 )𝑢1 (𝑡 − 1) + 𝐵22 (𝑧 −1 )𝑢2 (𝑡 − 1)] Por último, podemos ver que las predicciones del sistema MIMO van a partir desde la formulación del modelo multivariable: 1 𝐴𝑖 (𝑧 −1 )𝑦𝑖 (𝑡) = 𝑧 −𝑑𝑖 𝐵𝑖 (𝑧 −1 )𝑢(𝑡 − 1) + 𝑒(𝑡) ∆ 𝐵𝑖 (𝑧 −1 ) = [𝐵𝑖1 , 𝐵𝑖2 , … , 𝐵𝑖𝑚 ] 2.2.9.3. CALCULO DE LAS PREDICCIONES POR ECUACIONES DIOFANTINAS Castaño S. (2017) indica que “Básicamente es similar al procedimiento hecho en el caso SISO. Para un modelo CARIMA de n salidas por m entradas podemos usar el siguiente polinomio.
(47) 37 identidad que nos permite obtener las predicciones optimas de cada salida y(k+1)”. 1 = 𝐸𝑖𝑘 (𝑧 −1 )∆𝐴𝑖 + 𝑧 −𝑘 𝐹𝑖𝑘 (𝑧 −1 ) 𝑦̂𝑖 (𝑡 + 𝑗) = 𝐹𝑖𝑘 (𝑧 −1 )𝑦𝑖 (𝑡) + 𝑧 −𝑑𝑖 𝐸𝑖𝑘 (𝑧 −1 )𝐵𝑖 (𝑧 −1 )∆𝑢(𝑡 − 1) Donde: : es una matriz diagonal : tendrá un orden de. .. (número de predicciones en el horizonte. de predicción menos uno). tendrá un orden de. es decir su tamaño depende del polinomio. A relacionado a cada salida del sistema MIMO.. 2.2.9.4. CALCULO DE LAS PREDICCIONES POR LA FORMA RECURSIVA. Partimos de la ecuación de salida: 1 𝐴𝑖 (𝑧 −1 )𝑦𝑖 (𝑡) = 𝑧 −𝑑𝑖 𝐵𝑖 (𝑧 −1 )𝑢(𝑡 − 1) + 𝑒(𝑡) ∆ Calculamos la salida y1: 1 𝐴1 (𝑧 −1 )𝑦1 (𝑡) = 𝑧 −𝑑1 𝐵1 (𝑧 −1 )𝑢(𝑡 − 1) + 𝑒(𝑡) ∆ ∆𝐴1 (𝑧 −1 )𝑦1(𝑡) = 𝑧 −𝑑1 𝐵1 (𝑧 −1 )𝑢(𝑡 − 1) + 𝑒(𝑡).
(48) 38 LEY DE CONTROL Según Castaño S. (2017) indica que “el Cálculo de la ley de control para el caso irrestricto viene dado por:” ∆𝑢 = (𝐺 𝑇 𝑄𝛿 𝐺 + 𝑄𝜆 )−1 𝐺 𝑇 𝑄𝛿𝑇 (𝑤 − 𝑓) Donde: w: es la referencia f: es la respuesta libre. Considerando que el primer término de esta ecuación de la ley de control basta con calcularlo una única vez, o sea que podríamos decir que: 𝐾 = (𝐺 𝑇 𝑄𝛿 𝐺 + 𝑄𝜆 )−1 𝐺 𝑇 𝑄𝛿𝑇 Por lo que, la ley de control sería: ∆𝑢 = 𝐾(𝑤 − 𝑓). Para la matriz K de un proceso Multivariable, vamos a tomar la primera fila de cada bloque asociado a cada horizonte de control..
(49) 39 𝑤 − 𝑓𝑟1 Δ𝑢1 𝑘1 Δ𝑢2 𝑘2 𝑤 − 𝑓𝑟2 [ ⋮ ] = [ ⋮ ][ ] ⋮ Δ𝑢𝑁𝑢 𝑘𝑁𝑢 𝑤 − 𝑓𝑟𝑁𝑢 2.2.10.. INVERNADEROS. Un Invernadero es un espacio con el clima apropiado para el óptimo desarrollo de una plantación en específico. Los tipos de Invernaderos se puede citar los siguientes: . Invernadero Plano.. . Invernadero en Raspa y Amagado.. . Invernadero Asimétrico.. . Invernadero de Capilla Simple.. . Invernadero de Doble Capilla.. . Invernadero Túnel o Semicilíndrico.. . Invernadero de Cristal.. 2.2.10.1.. Techo Ecológicos.. Los techos verdes además de influir en el mejoramiento del clima de la ciudad, también optimizan la aislación térmica, el almacenamiento de calor del edificio, y su aislación acústica. Además son considerados, a largo plazo, más económicos que las cubiertas convencionales..
(50) 40. 2.2.10.2.. ¿Qué es un microclima?. Es un entorno o ámbito reducido que tiene diferentes condiciones ambientales a las encontradas en la misma área. Por ejemplo: un microclima está presente en un invernadero al penetrar los rayos solares en el interior, esto produce una reacción que presenta las condiciones necesarias para la siembra de un cultivo en común como es la temperatura, humedad del suelo y humedad relativa.. 2.3.. HIPÓTESIS DE LA INVESTIGACIÓN.. Para el problema denominado ¿Es eficaz la utilización de las técnicas de Control Predictivo Multivariable en la optimización del clima de un Invernadero?, se plantea las siguientes hipótesis:.
(51) 41. 2.3.1. HIPOTESIS GLOBAL. El Algoritmo de Control Predictivo Multivariable es significativamente eficaz en la optimización del clima de un invernadero.. 2.3.2. HIPOTESIS ESPECÍFICAS. o El algoritmo de Control Predictivo Multivariable es significativamente eficaz en la optimización del clima de un Invernadero. o El modelo de Control Predictivo Multivarible es significativamente eficaz en la mejora del nivel de producción agrícola en invernaderos. o La utilización de software de simulación aplicando técnicas de Control Predictivo Multivariable influyen altamente en la optimización del clima de un invernadero.. 2.4.. VARIABLES E INDICADORES. 2.4.1. VARIABLE INDEPENDIENTE Algoritmo de Control Predictivo Multivariable. 2.4.2. VARIABLE DEPENDIENTE Ventilación Temperatura interna 2.5.. OPERACIONALIZACIÓN DE VARIABLES. La presente investigación se estructura en las siguientes variables, indicadores y criterios de valoración:.
(52) 42 CUADRO Nº 01 OPERACIONALIZACIÓN DE VARIABLES. VARIABLES. CLASE. DEFINICIÓN. DEFINICIÓN. CONCEPTUAL. OPERACIONAL. INDICADORES. Técnica de control, que utiliza el modelo del proceso para. Algoritmo de control predictivo. calcular y Independiente. optimizar las predicciones de. multivariable. las acciones de. Automatización del. Nivel de. invernadero para el. mejoramiento de. mejoramiento de la. producción del. producción.. invernadero.. Característica de. Cantidad de. radiación de calor. calor y luz que. del sol. genera el sol. control y de la salida controlada. Energía en forma de calor y luz que incide el Energía solar. Independiente. sol sobre el invernadero, que aprovechan los productos agrícolas. Resultado del. Ventilación. Dependiente. flujo de aire en la. Relación:. ventana del. velocidad de. invernadero,. Posición del grado. cuya influencia. de apertura de la. es determinante. venta del. sobre la. invernadero.. temperatura, humedad y el nivel de CO2.. viento Grado de apertura de la ventana.
(53) 43 Resultado de la Relación: nivel. potencia del calefactor dentro Temperatura Interna. Dependiente. del invernadero, cuya influencia es determinante en los productos agrícolas.. de calor del Nivel de potencia. calefactor. que sale del calefactor. Temperatura dentro del invernadero.
(54) 44. CAPÍTULO III METODOLOGÍA DE LA INVESTIGACIÓN 3.1.. METODO DE LA INVESTIGACIÓN.. El presente trabajo de investigación utilizará los métodos de análisis, síntesis, experimentación, e inducción.. El método analítico se utilizará , primero determinando unidades de análisis, como el proceso a controlar, así como también el sistema de control predictivo multivariable, y luego separando el objeto de investigación que son las especificaciones de diseño, en sus partes integrantes con el objeto de descubrir los elementos esenciales que conforman el sistema de control.. El método de síntesis se usará como complemento necesario del método analítico, para integrar los elementos o nexos esenciales de las distintas unidades analíticas, con la finalidad de fijar las principales especificaciones de diseño del sistema de control.. El método deductivo se usará con el fin de sistematizar un marco de referencia de carácter general en el marco teórico, con el fin de comprender y orientar la investigación al caso particular del diseño de sistema de control predictivo generalizado aplicado al mejoramiento de producción en un invernadero..
(55) 45. El método experimental se usara con el fin de ver que efectos traerá la implementación del sistema de control predictivo generalizado al nivel de mejoramiento de la producción en un invernadero.. El método inductivo servirá de complemento al anterior método, pues teniendo en cuenta los resultados de la investigación aplicados a los casos particulares (metodología para el diseño de un sistema de control predictivo generalizado aplicado al mejoramiento de producción de un invernadero), se ira de hechos concretos a explicar las causas de los empirismos aplicativos, es decir la no aplicación generalizada de este tipo de metodología.. En resumen los pasos que se seguirán para realizar el presente trabajo de investigación son: . Describir el proceso a controlar, así como. identificar las. especificaciones de diseño del sistema de control. . Diseñar las variables lingüísticas de entrada y de salida.. . Diseñar y simular el sistema de control predictivo multivariable en estudio utilizando Matlab.. . Extraer y discutir las conclusiones a las que se ha llegado en el presente trabajo.. 3.2.. DISEÑO DE LA INVESTIGACIÓN.. 3.2.1. MODELO DEL INVERNADERO. Según Rodriguez F. (2002) menciona que el invernadero es un recinto cerrado donde la diferencia entre el clima interior y exterior se crea principalmente por la cubierta, mediante la radiación solar y los mecanismos del estancamiento de aire. La radiación se constituye de dos componentes; la onda corta que proviene directamente del sol, y la.
(56) 46 onda larga que proviene por emisión del suelo, el sistema de calefacción, las plantas y la transmisión por la cubierta (figura 3.1). Tsky. Aire externo Tg,a. Tg,i. Tg,i. Ti. Aire interno. Tp. Sistema de calefacción Suelo. Figura 3.1. Cambios energéticos en un invernadero. El estancamiento de aire se debe al poco cambio de aire que hay entre dentro y fuera del invernadero. Los fenómenos que influyen sobre el clima dentro del invernadero son: o La ventilación: es un factor determinante en la totalidad del clima interno. Su influencia se extiende sobre la temperatura, la humedad y sobre la concentración de CO2. o La radiación solar: La radiación solar influye mucho sobre la temperatura interior por medio de la cantidad de energía que proporciona. Es una radiación de onda corta, con una longitud de onda de entre 0.2 y 5 m.. o Los. procesos. de. intercambio. por. convección:. Los. intercambios por convección se manifiestan con todas las estructuras existentes dentro del invernadero. Su influencia es.
Figure

+7




Documento similar
Dentro de la industria y específicamente en los procesos de producción de alimentos se deben seguir lineamientos y estructuras definidas para obtener productos
Por último el proceso Manejo de la Producción es la tercer categoría con mayor impacto debido al consumo de hidrocarburos en el proceso de calefacción del invernadero, presentando
Palabras claves: Regalías, Estado Social de Derecho, Control fiscal, responsabilidad y calidad de vida.. * El presente artículo se desarrolla dentro del Semillero
En la actualidad donde la mayoria de las empresas para mantenerse dentro del mercado requieren lograr grarantizar la calidad de sus productos, la optimizacion de su producción
El objetivo es obtener un resultado positivo dentro de la producción agrícola, para lograr un salto en la calidad y volumen de los productos, por ejemplo, en Saavedra, 2017 se
Mediante los programas del gobierno para incentivar a las personas a cultivar productos agrícolas de buena calidad y de alta competitividad, además de promover a las habitantes
a) La garantía de calidad es aún de mayor importancia en la fabricación de los productos radiofarmacéuticos PET, debido a sus características particulares, como son los
El problema de la estacionalidad en la producción de subproductos, puede ser superado con un adecuado proceso de ensilaje, adicionando productos que aumenten sus contenidos de
