Sistema SCADA para un entrenador de proceso del servosistema ALECOP SAD 100
66
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Sistema SCADA para un entrenador de proceso del servosistema ALECOP SAD-100 Autor: José Alberto Moreno Corbea Email: [email protected]. Tutor: Dr. Roberto Luis Ballesteros Horta Dpto. de Automática, Facultad de Ing. Eléctrica, UCLV Email: [email protected]. Santa Clara 2017 "Año 59 de la Revolución".
(3) i. PENSAMIENTO. “Vive como si fueras a morir mañana, aprende como si fueras a vivir siempre” Mahatma Gandhi..
(4) ii. DEDICATORIA. A mi madre, con eterno agradecimiento, por dedicar cada día de su vida a formarme como ingeniero, y más importante aún, por su amor incondicional..
(5) iii. AGRADECIMIENTOS. A mi abuela Hilda, que no repara en brindarme su amor todos los días de esta vida. A todos mis tíos, con los que he podido contar siempre para emprender el arduo camino del aprendizaje. A mis amigos, dentro y fuera de la universidad, que me han apoyado en cada decisión que he tomado para llegar hasta aquí. A mi tutor Roberto Ballesteros por su disposición a ayudarme para completar esta tarea en todo momento. A toda mi familia. A todos los que de una forma u otra han estado junto a mí. Muchas Gracias..
(6) iv. RESUMEN. El servomecanismo ALECOP SAD-100, aun cuando se encuentra disponible para los estudiantes de la facultad de Ingeniería Eléctrica de la Universidad Central “Marta Abreu” de las Villas, no posee un sistema SCADA para realizar el entrenamiento en las diferentes funciones que este permite. En esta problemática se sustenta la presente investigación. En el trabajo se desarrolla un sistema de herramientas para la supervisión y el control del servomecanismo. Con la presente investigación se sistematizan los conocimientos sobre sistemas SCADA y accionamiento eléctrico. Tras ser comparado con otros sistemas entrenadores que describen otros procesos industriales, se observa su factibilidad y eficiencia. Con la realización de pruebas al sistema elaborado se obtienen buenos resultados y se justifican los componentes utilizados para su desarrollo y permiten además realizar una caracterización detallada del motor ALECOP-SAD 100..
(7) v. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii RESUMEN ............................................................................................................................iv INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 3 CAPÍTULO 1. 1.1. Sistemas SCADA en entrenadores de proceso .......................................... 5. Sistema SCADA....................................................................................................... 5. 1.1.1. Historia de los SCADA..................................................................................... 6. 1.1.2. Elementos de un sistema SCADA .................................................................... 7. 1.1.3. Funciones principales de los sistemas SCADA ................................................ 7. 1.1.4. Software para la supervisión y el control .......................................................... 8. 1.2. Comunicación OPC ................................................................................................ 12. 1.2.1. Introducción al OPC ....................................................................................... 13. 1.2.2. Funcionamiento de OPC ................................................................................. 13. 1.3. Componentes básicos de los sistemas entrenadores............................................... 17. 1.3.1. Simulación ...................................................................................................... 17. 1.3.2. Entrenamiento ................................................................................................. 18.
(8) vi 1.4. La teoría del control en la supervisión ................................................................... 18. 1.4.1. El lazo de control retroalimentado .................................................................. 19. 1.4.2. Controlador PID .............................................................................................. 20. 1.5. Antecedentes de entrenadores ................................................................................ 22. 1.6. Consideraciones finales del capítulo ...................................................................... 22. CAPÍTULO 2. Diseño del Entrenador SAD-100 ................................................................. 24 2.1. Caracterización del proceso ................................................................................... 24. 2.1.1. Instrumento virtual HSW16/17 ....................................................................... 24. 2.1.2. Servomecanismo ALECOP SAD-100 ............................................................ 25. 2.1.3. Tarjeta de adquisición de datos DAQ ............................................................. 26. 2.1.4. Controlador ..................................................................................................... 26. 2.1.5. Aplicación desarrollada mediante LabVIEW ................................................. 27. 2.2. Diseño del sistema Entrenador SAD-100 .............................................................. 29. 2.2.1. Arquitectura del Entrenador SAD-100 ........................................................... 30. 2.2.2. HMI del Entrenador SAD-100 ........................................................................ 30. 2.2.3. Modificaciones al VI HSW16/17 .................................................................... 34. 2.2.4. Comunicación entre las aplicaciones .............................................................. 35. 2.3. Supervisor cliente ................................................................................................... 37. 2.4. Consideraciones finales del capítulo ...................................................................... 38. CAPÍTULO 3.. Pruebas al Entrenador SAD-100 ............................................................... 39. 3.1. Prueba de comunicación mediante OPC ................................................................ 39. 3.2. Prueba de identificación experimental ................................................................... 41. 3.3. Prueba de control supervisorio ............................................................................... 43. 3.4. Prueba de control digital directo ............................................................................ 45.
(9) vii 3.5. Prueba del HMI ...................................................................................................... 47. 3.6. Valoración económica y medioambiental .............................................................. 49. 3.7. Consideraciones finales del capítulo ...................................................................... 50. CONCLUSIONES Y RECOMENDACIONES ................................................................... 51 Conclusiones ..................................................................................................................... 51 Recomendaciones ............................................................................................................. 52 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 53 ANEXOS .............................................................................................................................. 55 Anexo I. Variables del Entrenador SAD-100 para la comunicación ............................. 55.
(10) INTRODUCCIÓN. 1. INTRODUCCIÓN. Los entrenadores de proceso surgen como soporte para el control de las tareas complejas realizadas por el operador, con el fin de suplir sus posibles carencias producidas, entre otros motivos, por la sobrecarga de información o la fatiga y la complejidad de la planta que se controla. Se trata de automatizar en la medida en que sea posible, el análisis de los datos, la detección de fallos, el diagnóstico de los mismos y la toma de decisiones o propuesta de acciones concretas. Es de gran importancia sobre todo cuando la planta a controlar es compleja (Colomer et al., 2000). Estos sistemas entrenan a los operadores en las diversas ramas en las que se desempeñan, los capacita para comprender de forma detallada el proceso que se les asigna y afrontar situaciones reales. que se presentan en la industria. Se realizan también con fines. educativos, para fomentar los conocimientos en las diversas ramas de la ciencia: Física, Electrónica y Teoría del Control. Los entrenadores de procesos son utilizados de forma amplia a nivel industrial, permiten la preparación o entrenamiento del personal cuando resulta caro o muy peligroso permitirle usar equipo real en circunstancias reales. Esto es posible mediante la simulación, se recrean situaciones reales de los procesos en las industrias, aporta valiosas lecciones en un ambiente virtual seguro y permite errores durante el entrenamiento. Tan importante es detectar con rapidez una situación anómala, como saber el porqué de dicha situación y actúa en consecuencia para que no vuelva a suceder. En este sentido, los sistemas de supervisión son imprescindibles para la automatización de tareas en la implementación de planes de calidad. Para ello, el sistema de supervisión toma provecho del conocimiento previo disponible sobre el funcionamiento del proceso (Montero, 2004)..
(11) INTRODUCCIÓN. 2. Ejemplos de entrenadores de sistemas supervisorios son los usados por los pilotos de aviones de todo el mundo. Es obligatorio su uso con cierta periodicidad para evaluar sus aptitudes con rigurosidad y prepararlos para resolver cualquier problema que pueda aparecer en el vuelo (Montero Avendaño, 2011). En los laboratorios de computación de la carrera de Ingeniería en Automática de la Universidad Central “Marta Abreu” de Las Villas no se dispone de software de entrenamiento que reproduzcan los diversos procesos que han surgido en las industrias. Otro aspecto de interés es que no se tiene en cuenta la simulación en tiempo real de dichos procesos y las consideraciones prácticas en la implementación de algoritmos de control. Estos elementos traen consigo que estudiantes y profesores no puedan realizar prácticas y entrenamiento en tiempo real del comportamiento de procesos. El análisis y diseño de los procesos controlados se realiza a partir de las estrategias convencionales, lo que constituye un trabajo monótono. Los estudiantes de sistemas de control no se benefician de las ventajas de la simulación en tiempo real que propicia una mejor comprensión del proceso al controlarlo y analizar su comportamiento de forma continua. El problema científico encontrado es: la ausencia de un sistema supervisorio para un entrenador de procesos del servomecanismo ALECOP SAD-100, disponible para prácticas reales en los laboratorios de la facultad de Ingeniería Eléctrica de la Universidad Central “Marta Abreu” de las Villas. Lo que provoca deficiencias para fortalecer los conocimientos teóricos que se adquieren en las asignaturas de la rama de Control al no interactuar de forma real con los lazos de control. La hipótesis a desarrollar es la siguiente: Un sistema SCADA para el entrenador del servomecanismo ALECOP SAD-100, contribuirá al desarrollo de los conocimientos impartidos en las asignaturas de la disciplina de control por los docentes de la especialidad en la facultad de Ingeniería Eléctrica de la Universidad Central “Marta Abreu” de Las Villas. Los estudiantes de la facultad se beneficiarán de una herramienta valiosa para la realización de prácticas y laboratorios reales al aprovechar los medios de enseñanza disponibles en la misma..
(12) INTRODUCCIÓN. 3. Se plantea el objetivo general de la investigación: Diseñar un sistema SCADA para el entrenador del servomecanismo ALECOP SAD-100 que permita desde la PC la operación de un lazo de control en tiempo real, tanto real como simulado. Para el cumplimiento del objetivo general, se proyectan los objetivos específicos siguientes: . Analizar la bibliografía existente sobre entrenadores en tiempo real y sistemas supervisorios.. . Caracterizar el servosistema SAD-100 y el software desarrollado en Herramientas de Software para el Control.. . Simular en tiempo real el servosistema SAD-100.. . Establecer un protocolo de comunicación entre el servosistema SAD-100 y un SCADA.. . Desarrollar un sistema SCADA para el control del servosistema SAD-100, simulado y real, con la comunicación establecida.. . Desarrollar pruebas en tiempo real del sistema SCADA para la supervisión del servosistema SAD-100, de forma simulada y real.. . Valorar los resultados de las pruebas realizadas.. Se realiza el análisis de cada uno de los elementos con los que se cuenta para el desarrollo del sistema, se implementa y configura; siempre de forma orientada a obtener su mayor eficiencia. Los estudiantes y profesores de la facultad cuentan así con un sistema complejo, pero de fácil manipulación para el desarrollo de prácticas reales y simuladas con el servomecanismo, que abarcan una amplia gama de contenidos académicos relacionados, como son: Accionamiento Eléctrico, Teoría de Control, Medios de Transmisión de la Información y Medios Técnicos de Automatización . El sistema aporta herramientas desarrolladas de forma específica para el entrenamiento en el servosistema SAD-100 Organización del informe El informe de la investigación presenta la estructura siguiente:.
(13) INTRODUCCIÓN. 4. Introducción: Se aborda la importancia, actualidad y necesidad de los sistemas entrenadores y se presentan los elementos teóricos principales, así como el problema científico a resolver en la investigación, la hipótesis y los objetivos que se persiguen con esta. Capítulo I: Este capítulo se dedica a abordar los conceptos principales relacionados con los entrenadores de proceso y los sistemas SCADA, la descripción del lazo de control en estudio para el trabajo en tiempo real. Se explican aspectos importantes sobre el protocolo de comunicación OPC y se presentan como antecedentes algunas aplicaciones sobre el uso de entrenadores de procesos en tiempo real. Capítulo II: En este capítulo se describe el diseño del entrenador de procesos en tiempo real y se elaboran y configuran todos los elementos de hardware y software que lo componen. Se realiza el diseño del sistema SCADA para la supervisión del mismo. Se establece el protocolo de comunicación entre el proceso simulado y real, el VI desarrollado en LabVIEW y el sistema SCADA. Capítulo III: En este capítulo se presentan las pruebas en tiempo real con el proceso simulado y real, la adquisición de datos desde la PC y el lazo de control en el sistema SCADA y el LabVIEW. Se muestran los resultados obtenidos en las pruebas. Conclusiones Recomendaciones Referencias Bibliográficas Anexos.
(14) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 5. CAPÍTULO 1. Sistemas SCADA en entrenadores de proceso. El hombre es un supervisor por naturaleza; cualquier actividad que este realice, sea simple o compleja, involucra cierto grado de supervisión. Por ejemplo, al conducir un automóvil, al cuidar de la seguridad de su casa o al supervisar la calidad de procesos de producción de algún bien. El hombre ha supervisado a través de los años de diversas maneras conforme ha evolucionado y desarrollado herramientas que le facilitan esta tarea. Los sistemas supervisorios para entrenadores de procesos surgen como una necesidad de garantizar la eficiencia en los diferentes procesos que se automatizan. Les dan a sus operadores una herramienta para prepararlos en el proceso de supervisión. En este capítulo se presentan los diferentes elementos que componen la supervisión y el entrenamiento de servomecanismos y se definen elementos claves para comprender las herramientas que se utilizan para desarrollarlos. 1.1 Sistema SCADA La expresión “SCADA” está compuesta por las iniciales de la denominación inglesa “Supervisory Control And Data Adquisition”, que en el idioma Español se traduce como “Control Supervisorio y Adquisición de Datos”. Sin embargo, dado que los primeros sistemas de supervisión se originaron en los Estados Unidos, se ha generalizado el uso de las siglas SCADA para aludir a dichos sistemas. (Lakhoua, 2009; Chavarría, 2007) Se trata de un sistema capaz de obtener y procesar información de procesos industriales dispersos y de actuar en forma remota sobre los mismos. Esto significa que permite supervisar de forma simultánea procesos e instalaciones industriales distribuidas en grandes áreas, tales como las redes de distribución eléctrica, oleoductos y gasoductos..
(15) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 6. En este epígrafe se abordan elementos relacionados con los sistemas SCADA. Aspectos tales como su historia, sus componentes y funciones que permiten comprender su importancia. Se tratan además los software para su realización, que constituyen una herramienta eficaz y que son utilizados con mayor regularidad en el proceso de supervisión. 1.1.1 Historia de los SCADA Los primeros SCADA eran simples sistemas que proporcionaban reportes periódicos de las variables de campo, vigilaban las señales que representaban medidas y condiciones del estado de la planta desde ubicaciones remotas, en muchos casos lo que se hacía era imprimir o registrar en papel la información de las variables de la planta; y llevaban un histórico de los eventos que ocurrían durante la operación del proceso. Estos sistemas ofrecían capacidades muy simples de monitorización y control, sin proveer funciones de aplicación alguna. La visión del operador del proceso estaba basada en instrumentos y señalizaciones lumínicas montadas en paneles llenos de indicadores. (Izaguirre, 2008) Con el avance de la tecnología, las computadoras comenzaron a aplicarse en el control industrial, realizaron tareas de recolección y almacenamiento de datos, generación de comandos de control, presentaron la información sobre una pantalla, que en aquellos tiempos eran monocromáticas. Muchas empresas vieron la necesidad y lo rápido que avanzaba el desarrollo de los ordenadores, realizaron programas de aplicación específicos para atender requisitos de algún proyecto particular. Así aparecieron los pequeños software SCADA que nacen de empresas desarrolladoras de software, que constituyeron una nueva experiencia para muchas de ellas. (Lakhoua, 2009; Chavarría, 2007) La mayoría de los sistemas SCADA modernos que se instalan, constituyen parte integral de la estructura de dirección y gerencia de cualquier planta. Estos sistemas ya no son vistos por la gerencia como herramientas operacionales para la supervisión y el control automático; sino, como un recurso importante de información corporativa, sin el cual sería imposible administrar la empresa. (Izaguirre, 2008).
(16) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 7. 1.1.2 Elementos de un sistema SCADA Los sistemas SCADA constan de tres componentes fundamentales que lo definen de forma íntegra y posibilitan su eficiente desempeño (Chavarria Meza, 2007; Ecured, 2016): 1- Múltiples Unidades de Terminal Remota (también conocida como UTR, RTU o Estaciones Externas). 2- Estación Maestra Remota (conocida como MTU por sus siglas en Inglés) y computador con Interfaz Humano – Máquina (HMI también por sus siglas en Inglés). 3- Infraestructura de comunicación. El SCADA describe un número de RTU instaladas en las cercanías del proceso que se comunican con una estación maestra MTU, ubicada en una sala de control central. Una RTU es un sistema que de forma general cuenta con un microprocesador e interfaces de entrada y salida tanto analógicas como digitales que permiten tomar la información del proceso provista por los dispositivos de instrumentación y control en una estación remota y utiliza técnicas de transmisión de datos para enviarla al sistema centralizado. La MTU, bajo un software de control, permite la adquisición de los datos a través de todas las RTU y brinda la capacidad de ejecutar comandos de control cuando es requerido por el operador. Los datos adquiridos por la MTU se presenta a través de una interfaz gráfica en forma comprensible y utilizable, esta información puede ser impresa en un reporte (Colomer, 2000). 1.1.3 Funciones principales de los sistemas SCADA Dentro de las funciones principales realizadas por los sistemas SCADA están las siguientes: Supervisión: El operador puede observar desde el monitor la evolución de las variables de control, como cambios que se produzcan en la operación diaria de la planta, lo que permite dirigir las tareas de mantenimiento y estadística de fallas. Control: El sistema puede activar o desactivar los equipos de forma remota; por ejemplo abrir válvulas, activar interruptores y prender motores, de manera automática y manual. El.
(17) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 8. operador puede ejecutar acciones de control y puede modificar la evolución del proceso en situaciones irregulares que se generen. Adquisición de datos: Se recolecta, procesa, almacena y muestra la información recibida en forma continua a partir de los equipos de campo. Generación de reportes: Se usan los datos adquiridos para generar representaciones gráficas, predicciones, control estadístico, gestión de la producción y gestión administrativa-financiera. Representación de señales de alarma: A través de las señales de alarma se logra alertar al operador frente a una falla o la presencia de una condición perjudicial o fuera de lo aceptable, estas pueden ser tanto visuales como sonoras. Generación de históricos: Conjunto de datos que corresponden a diferentes señales de una planta, que pueden ser volcados y procesados sobre una hoja de cálculo. Software para la supervisión y el control 1.1.4 Software para la supervisión y el control Los software que se utilizan para llevar a cabo las tareas de supervisión y el control son poderosas herramientas que garantizan la eficiencia en los diferentes procesos industriales. Poseen un entorno de desarrollo encaminado siempre a hacer más sencillo el trabajo de sus desarrolladores en el campo de la automatización. En la actualidad gran número de compañías desarrolladoras de software ofrecen sus productos y los mantienen en proceso de actualización constante para garantizar la demanda de estos productos. Dentro de los software más destacados para la supervisión y el control se encuentran:. WinCC: WinCC, es un potente sistema HMI que se utiliza bajo Microsoft Windows NT y Windows 2000. Permite que el operador observe el proceso y que lo visualice de forma gráfica en la pantalla. En cuanto cambia un estado en el proceso se actualiza la visualización. WinCC permite que el operador maneje el proceso; así, desde la interfaz gráfica de usuario él puede predeterminar un valor deseado, abrir una válvula o enviar otra señal de mando. (WinCC, 2017).
(18) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 9. Los avisos y los valores de proceso se pueden imprimir y archivar en formato electrónico. El usuario documenta así la evolución del proceso y puede acceder de manera posterior a los datos de producción del pasado. El sistema básico WinCC se compone de los siguientes subsistemas: . Sistema de gráficos. . Sistema de avisos. . Sistema de archivos. . Sistema de informes. . Comunicación. . Administración de Usuario. Ampliabilidad: Gracias a las interfaces abiertas y estandarizadas de WinCC, las ampliaciones individuales son fáciles de implementar y reportan rentabilidad económica. Controles Activos: Un control ActiveX puede contener, por ejemplo, un botón de comando especial o un elemento gráfico de visualización. Con WinCC se suministran numerosos controles ActiveX. El usuario también puede programar sus propios controles ActiveX y adquirir otros de terceros fabricantes. OLE: "Object Linking and Embedding"; se trata de un estándar para el intercambio de datos entre los programas y Microsoft Windows, con el cual se insertan en la propia aplicación datos de otra aplicación. Un ejemplo característico es el tratamiento de textos, en el que el usuario puede insertar un gráfico y editarlo con un doble clic; acto seguido Windows abre el programa de gráficos original para editarlo. OPC: “OLE/COM for Process Control”; Una forma de OLE que se desarrolla para la automatización es "OLE for Process Control", también conocida de forma habitual por OPC. Con este estándar se pueden comunicar entre sí tantos componentes con capacidad OPC como se desee. Al configurar, el usuario no tiene que ocuparse con mucho detalle de la interfaz. WinCC puede actuar tanto como un cliente OPC como en calidad de servidor OPC. Cuando funciona como cliente OPC, WinCC accede a los datos de otras aplicaciones. Cuando se utiliza WinCC como servidor OPC los datos son puestos a disposición de las otras aplicaciones..
(19) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 10. SQL y ODBC: Por medio de SQL y ODBC se puede acceder al contenido de las bases de datos WinCC. SQL es la abreviatura de Structured Query Language, un lenguaje estandarizado para acceder a las bases de datos. ODBC es la abreviatura de Open Database Connectivity, un protocolo estandarizado para acceder a bases de datos bajo Microsoft Windows. Los datos escrutados se pueden utilizar en otras aplicaciones, así como integrarlos dentro de otras bases de datos. API: “Application Program Interface”; WinCC tiene una interfaz de programación C. Con ella se puede influir en otras aplicaciones WinCC, acceder a datos de configuración y a datos de tiempo de corrida, e intervenir en el proceso.. Movicon: El software Movicon (Monitoring, Vision and Control) es un entorno de desarrollo SCADA creado por la empresa Progea y se destaca en la actualidad por ser una tecnología innovadora, flexible y escalable para software SCADA/HMI. Una valoración sobre sus características y prestaciones se realiza a continuación (Rivero López, 2015)(Progea, 2017): Simplicidad de uso: Está dada gracias al espacio de trabajo cómodo e intuitivo para los usuarios que prefieren Windows como sistema operativo, los asistentes integrados para realizar funciones comunes y las herramientas para la importación de variables. Escalabilidad: Movicon provee un único entorno de desarrollo para aplicaciones desde Windows CE hasta Windows XP, por lo que al adquirir un solo programa los desarrolladores pueden implementar pequeñas aplicaciones para terminales HMI, así como aplicaciones de mediana y gran complejidad para plantas de procesamiento. Sistema abierto: Movicon se diseña como sistema abierto que utiliza los estándares de Microsoft tales como: ActiveX permite insertar objetos de terceros. ODBC se utiliza para la gerencia de la base de datos. VBA (Visual Basic Express), para la programación en elementos tales como sinópticos y scripts..
(20) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 11. OPC para la conectividad, la importación y exportación de los datos o símbolos. Windows API para garantizar la extensión de sistema a través del DLL (Dynamic-Link Library). Movicon es una plataforma basada en XML (eXtensible Markup Language), por tanto, los proyectos realizados sobre este entorno de desarrollo son archivos de texto que pueden ser abiertos y editados en cualquier editor XML. Seguridad de los datos: Asegurada por el uso de algoritmos de encriptación de 128 bits de los archivos de texto y las funciones de administración de usuarios y contraseñas que aseguran control de acceso por niveles y/o áreas. Uso de tecnologías estandarizadas: Movicon está basado en estándares XML, ODBC, OPC, VBA, SOAP (SimpleObject Access Protocol), Servicios Web, TCP-IP (Transport Control Protocol-Internet Protocol), UDP (User Datagram Protocol), HTTP (Hypertext Transfer Protocol), SQL (Structured Query Language); que garantizan transparencia, fácil acceso a los datos y seguridad a la inversión del desarrollador en el producto. Alto rendimiento: El rendimiento del Kernel es alto (módulo principal o núcleo). Esta mejora se debe a la renovación del concepto de “thread pooling” (asociación de hilos) y el nuevo mecanismo de gráficos basado en SVG (Gráficos Vectoriales Escalables). Alta conectividad: El software ofrece los driver de comunicación que incluyen funcionalidades de importación de variables (tags), conectividad remota vía modem, conceptos de multiestación para protocolos punto a punto y pruebas de cableado inmediatas. Las bibliotecas de driver se incluyen sin costos adicionales. Eficiente sistema de redes: La administración integrada del sistema de redes se basa en las tecnologías multiplataforma SOAP y SOA (Service-Oriented Architecture). Además, soporta los protocolos UDP, HTTP, TCP-IP y conexiones remotas automáticas vía RAS (Remote Access Services). Ofrece tecnologías de servicio web para las cuales la distribución de la información puede soportar redes públicas, como Internet, que garantizan la seguridad sin ser perjudicial para ningún cortafuego. Arquitectura “Web-enabled” (habilitada para la Web): Se integra la tecnología JAVA con XML, SVG y las tecnologías de Servicios Web. Así se permite acceso al servidor mediante.
(21) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 12. el uso de un navegador de internet sobre cualquier sistema operativo. Progea asegura posibilidad de conexión de usuarios múltiples, bidireccionalidad, alto rendimiento y seguridad. LabVIEW: El software LabVIEW, acrónimo de Laboratory Virtual Instrumentation Engineering Workbench,(National Instrument, 2017), es una plataforma y entorno de desarrollo creado por National Instruments en 1976 para diseñar sistemas con un lenguaje de programación visual gráfico llamado Lenguaje G (Holguín Londoño, et al., 2002). Los programas desarrollados con LabVIEW se llaman Instrumentos Virtuales o VI y su origen proviene del control de instrumentos. Este es recomendado para sistemas hardware y software de pruebas, control y diseño, simulado o real y embebido, pues acelera la productividad. Puede combinarse con todo tipo de software y hardware, tanto del propio fabricante como de otros. Este presenta facilidades para el manejo de interfaces de comunicaciones. Tiene la capacidad de interactuar con otros lenguajes y aplicaciones. Posee herramientas gráficas y textuales para el procesado digital de señales y la visualización y manejo de gráficas con datos dinámicos. Permite la adquisición y tratamiento de imágenes, el control de movimiento y la sincronización entre dispositivos. Posee programación de FPGA (Field Programmable Gate Array), para control o validación y herramientas para el trabajo en tiempo real. Dentro de sus principales características se encuentran su facilidad de uso y rapidez de programación. Con LabVIEW pueden crearse programas de miles de VI, equivalente a millones de páginas de código texto para aplicaciones complejas, programas de automatizaciones de decenas de miles de puntos de entradas/salidas(E/S) (Hernández Cevallos & Ledesma Marcalla, 2010). 1.2 Comunicación OPC Los grandes avances tecnológicos en las diferentes ramas de la producción industrial traen consigo el surgimiento de numerosas empresas desarrolladoras de sistemas SCADA. Es común que el propio fabricante del hardware industrial ofrezca el software para establecer.
(22) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 13. la comunicación entre los equipos. Esta solución dificulta la integración de tecnologías de diferentes proveedores. Existen diversos protocolos de comunicación que posibilitan el funcionamiento de los diferentes lazos de control al conectar e integrar software y hardware propios de un proceso. Es el protocolo OPC el más estandarizado de estos (OPC, 2017). 1.2.1 Introducción al OPC Es común que un fabricante cuide de su propiedad intelectual. No revela los detalles de funcionamiento de sus equipos. Dificulta con esto aún más el diseño de soluciones de automatización de plantas donde hay equipos de diferentes proveedores. En la actualidad OPC constituye un estándar de comunicación. Es una tecnología de protocolos de alto nivel para el desarrollo de aplicaciones de software interoperable en sistemas distribuidos, para la monitorización y control en plantas industriales. Da cabida a que equipos de diferentes fabricantes puedan trabajar sin que se presenten conflictos entre ellos y facilita que cada empresa cree aplicaciones de medición y control, hechas a su medida, sin tener que depender de una sola casa fabricante de equipos y sin tener que pagar los altos costos que implica el licenciamiento de software industrial. 1.2.2 Funcionamiento de OPC Son las tecnologías OLE/COM (Object Linking and Embedding / Component Object Model) de Microsoft las que constituyen la base de la tecnología OPC, que es una arquitectura de Cliente-Servidor que brinda una muy buena plataforma para extraer datos de una fuente (en este caso un equipo Industrial) y a través de un servidor comunicarlos a cualquier aplicación cliente de manera estándar (OPC-Fundation, 1998). Los fabricantes de hardware pueden desarrollar servidores optimizados para recoger datos de sus dispositivos (OPC-Fundation, 1998), dan al servidor una interfaz OPC que permite a cualquier cliente acceder a dichos dispositivos. En la Figura 1.1 se muestra la arquitectura simplificada de un sistema de control distribuido tradicional (Ogata, 1997), cada aplicación de usuario debe tener su propio driver para comunicarse con los dispositivos físicos. Se encuentran dificultades en dos niveles, en primer lugar se debe desarrollar un controlador de dispositivo, que es un.
(23) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 14. programa encargado de comunicarse de forma directa con el equipo industrial a monitorizar y/o controlar. Si por ejemplo el dispositivo es un PLC, entonces se debe programar (o en su defecto adquirir) un programa que sea capaz de hablar de forma directa con el PLC para pedirle datos o configurar su funcionamiento.. Figura 1.1 Sistema tradicional de control distribuido de procesos Por otro lado se debe desarrollar o adquirir un driver que pueda comunicarse con el controlador del dispositivo para enviar y recibir los datos que cada aplicación requiere. Una de las aplicaciones podría ser un programa sencillo, que solo le reporta datos de producción a un ejecutivo encargado de supervisar el control de calidad. La otra aplicación podría ser un programa bastante más complejo en el que el ingeniero encargado de programar la producción, visualice la información y mediante alguna interfaz segura pueda reconfigurar aspectos importantes del proceso productivo, por ejemplo, modificar los parámetros de un controlador o el programa almacenado en la memoria de un PLC (Echeverri, 2005). En la Figura 1.2 se muestra la arquitectura simplificada de un sistema de control distribuido que incorpora tecnología OPC (Deiretsbacher y et al., 2005). Para que un sistema de este tipo pueda funcionar de forma apropiada, el equipo industrial debe soportar la comunicación con un servidor OPC. Este servidor no es más que un programa que se ejecuta de manera local en el mismo computador donde corre la aplicación de monitorización y control o de forma remota en otro equipo que actúe como servidor (computador o no). Se encarga de funcionar como una pasarela de información (gateway).
(24) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 15. entre las aplicaciones de software de monitorización y control y el equipo industrial. Esto hace que la comunicación sea transparente de forma total (OPC Fundation, 1998).. Figura 1.2 Sistema de control distribuido de procesos que incorpora una tecnología OPC OPC tiene la robustez suficiente para que un fabricante pueda garantizar una comunicación de tipo "Plug & Play" entre un equipo que soporte OPC y su respectivo servidor OPC. La comunicación entre los clientes y servidores OPC es transparente y se ha diseñado de manera tal que pueda funcionar sin problemas de forma virtual sobre cualquier medio de transmisión de información. En la Figura 1.3 se muestra una aplicación desarrollada en C/C++ y otra desarrollada en LabVIEW. En la Figura 1.4, se muestra la implementación de la arquitectura de la Figura 1.3, en una planta industrial real. Se muestran cuatro dispositivos (dispositivos 1 a 4) que se encargan del control de diferentes procesos dentro de una cadena productiva, todos ellos tienen un bus serial industrial RS-485 que los conecta un computador o a un PLC y todos fueron diseñados para ser compatibles con OPC. Tanto en el PLC B como en el computador A se ejecutan servidores OPC, que tienen la capacidad de forma transparente con los dispositivos industriales que tienen conectados. En el computador A se ejecuta un cliente local, que se usa por una aplicación de monitorización para adquirir datos de los dispositivos 1 y 2..
(25) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 16. Figura 1.3 Sistema de control distribuido de procesos donde interactúan tanto los dispositivos industriales, clientes y servidores OPC y aplicaciones finales.. Figura 1.4 Planta industrial donde se ha implementado un sistema distribuido de monitorización y control con OPC En los computadores C y D se ejecutan clientes OPC que se comunican con servidores OPC remotos. En el computador se corre una aplicación de monitorización. El computador D tiene instalada un programa más robusto que le permite al ingeniero de planta no solo.
(26) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 17. visualizar las variables de los procesos, sino que también le permite reconfigurar los procesos que llevan a cabo los dispositivos 1, 2, 3, 4 y el PLC B. El computador C, no está conectado de forma directa a ningún dispositivo industrial. Puede ser una estación de trabajo perteneciente a la intranet de la empresa e incluso se puede pensar en la posibilidad de transportar información por Internet, con el uso de TCP/IP como tecnología para la transmisión de la información. OPC representa una ventaja significativa al problema de la estandarización de los buses de campo (Hadlish, 1999), industrial, pues es independiente de estos. Hace que la transferencia de datos sea rápida y confiable. Logra una estandarización de la comunicación, de tal modo que los servidores OPC y cualquier aplicación cliente pueden interactuar sin ningún problema (Burke, 1998). 1.3 Componentes básicos de los sistemas entrenadores Los entrenadores de procesos poseen dos elementos básicos o funciones, que deben implementarse al seguir una metodología bien definida (Montero Avendaño, 2011) . Estos son: . La simulación. . El entrenamiento. Debe dársele igual importancia a cada una de ellos ya que constituyen componentes claves para un correcto desempeño del sistema que se implemente. 1.3.1 Simulación Se podría considerar que la simulación surge en 1777 con el planteamiento del problema ¨La aguja de Buffon¨, un método matemático sencillo que aproxima el valor del número 𝝅 a partir de sucesivos intentos (Lander Simulation & Training Solutions, 2015). La simulación según (Shannon, 1998) es el proceso de diseñar un modelo de un sistema real y llevar a término experiencias con él, con la finalidad de comprender el comportamiento del sistema o evaluar nuevas estrategias dentro de los límites impuestos por un cierto criterio o un conjunto de ellos para el funcionamiento del sistema. La simulación es realizada por diferentes métodos, dentro de los más utilizados se encuentra la simulación por computadora. Este es un intento de modelación de situaciones.
(27) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 18. de la vida real por medio de un programa informático, lo que requiere ser estudiado para ver cómo es que trabaja el sistema (Tarifa, s.f.). Gracias al avance tecnológico el uso de la simulación por computadoras es usada en el entrenamiento o preparación de las personas para la correcta manipulación de equipos o para la optimización de procesos industriales u otras actividades de la vida cotidiana. Su importancia está en que permite cometer errores durante el entrenamiento y aporta valiosas lecciones a los usuarios en un ambiente seguro. En áreas como la educación, la simulación por computadora cumple un rol muy importante ya que se usa para evaluar el aprendizaje, resolver problemas de habilidades y disposición de los estudiantes y el servicio de los profesores. 1.3.2 Entrenamiento El entrenamiento es la acción que se refiere a la adquisición de conocimientos, habilidades, y capacidades como resultado de la enseñanza de habilidades o prácticas y conocimiento relacionado con aptitudes que encierran cierta utilidad. Este forma el centro del aprendizaje y proporciona la base de los contenidos en las personas que desarrollan esta actividad (Montero Avendaño, 2011). El entrenamiento está vinculado con varias herramientas, una de ellas es la simulación, esta es usada en el entrenamiento o preparación de las personas. La simulación es fundamental, ya que se utiliza cuando resulta caro o muy peligroso permitirle usar equipo real a un aprendiz en el mundo real. Su importancia está en que las personas aprenden valiosas lecciones en un ambiente virtual seguro y que estas pueden cometer errores durante el entrenamiento para un sistema crítico de seguridad. 1.4 La teoría del control en la supervisión La supervisión de procesos es realizada de manera similar a la supervisión que realizan las personas ante cualquier actividad. Los diagramas utilizados para esquematizar el comportamiento de las personas son muy similares a los utilizados en la teoría de control, solo que cada elemento recibe un nombre particular de acuerdo a la función que desempeña. La supervisión de procesos se puede representar con el uso de diagramas de.
(28) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 19. bloques de estrategias de control de procesos. Se revisarán los esquemas utilizados en la teoría de control que corresponden al control retroalimentado. 1.4.1 El lazo de control retroalimentado Un lazo de control retroalimentado es aquel en el cual el controlador manipula el proceso solo en base a la respuesta obtenida de este y la referencia deseada. Es la estructura elemental de control y consta de los elementos citados a continuación (B & Tabares G, 1997) (Ver figura 1.5).. Figura 1.5 Lazo de control retroalimentado simple Planta: Es un equipo que tiene como objetivo realizar una operación determinada. Por ejemplo: un horno, un tanque almacenador, un motor, etc. Proceso: Es una operación progresiva y continua que consiste en una serie de acciones controladas de forma sistemática para obtener cierto resultado. Por ejemplo: el llenado de un tanque, el calentamiento de un horno, el giro de un motor, etc. Sistema: Es la combinación de componentes del lazo de control que actúan de forma conjunta y cumplen determinado objetivo. Referencia: Es el objetivo deseado de comportamiento de un proceso. Por ejemplo, para un proceso productivo, una referencia sería el número de unidades por minuto que se desea producir. Para un proceso de llenado de un tanque, la referencia sería el porcentaje deseado de llenado..
(29) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 20. Comparador entre referencia y resultado: Este elemento compara la referencia contra el resultado obtenido, arroja un error que es la diferencia entre ambas variables. El resultado es restado de la referencia, de esta forma se generan tres posibles tipos de error: positivo, negativo y cero. Error: Es la diferencia entre la referencia y el resultado, marca la pauta para que el controlador realice su trabajo. Controlador: Genera una variable manipuladora a partir del error recibido, para realizar una acción correctiva en el proceso. Variable manipuladora: Las variables manipuladoras son aquellas que permiten cambios en el proceso. Variable de proceso: Es la variable que se controla. Acondicionador de Señal: Formado por los elementos necesarios para poder cuantificar la variable de proceso, transmitir y acondicionar esta señal. Perturbaciones: Estas son alteraciones al proceso, y si bien no forman parte del lazo de control, sí afectan en el desempeño del mismo. Dentro de las ventajas del control retroalimentado podemos citar que trata de eliminar el error en base a su desviación, y que es efectivo para muchas perturbaciones. Las desventajas que presenta son que no puede tomar una acción de control hasta que la variable del proceso es desviada de su referencia y que el controlador puede afectar la estabilidad del sistema de control en lazo cerrado. Ejemplos de lazos de control de este tipo son comunes en la industria, dentro de los procesos automatizados. 1.4.2 Controlador PID El controlador es un componente fundamental dentro de los lazos de control, este compara el valor efectivo de salida de una planta con el valor deseado, determina la desviación y produce una señal de control que reduce la desviación a cero o a un valor pequeño (B & Tabares G, 1997). Dentro de los controladores más usados se encuentran los controles de dos posiciones (todo-nada, si-no, on-off), controles proporcionales (P), controles integrales, controles.
(30) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 21. proporcionales e integrales (PI), controles proporcionales y derivativos (PD), y los controles proporcionales, integrales y derivativos (PID) (Ogata, s.f.). Estos tienen como característica en común la toma de decisiones para mantener el punto de control ante los efectos de las perturbaciones. Por tener una exactitud mayor a los controladores proporcional, proporcional derivativo y proporcional integral, el controlador PID se utiliza en aplicaciones más cruciales tales como control de presión, flujo, fuerza, velocidad, en muchas aplicaciones químicas en reguladores de velocidad de automóviles y el control de ozono residual en tanques de contacto. El algoritmo de cálculo del control PID se da en tres parámetros distintos: el proporcional, el integral y el derivativo; este puede representarse en varias formas y se suele modificar para obtener mejores prestaciones. Una valoración de las mismas se realiza a continuación (Gil Nabojas & Díaz Cordovés, 2009): Forma estándar o no interactiva: La forma estándar algunas veces es llamada “algoritmo ISA”, o “algoritmo ideal”. Las acciones proporcional, integral y derivativa son no interactivas en el dominio del tiempo. Este algoritmo admite ceros complejos, lo que es útil cuando se controla sistemas con polos oscilatorios. 1. 𝐺(𝑠) = 𝐾 (1 + 𝑠𝑇 + 𝑠𝑇𝑑 ) 𝑖. (1.1). Dónde: 𝐾: Ganancia proporcional 𝑇𝑖 : Tiempo integral 𝑇𝑑 : Tiempo derivativo Forma serie o interactiva: La forma serie es también llamada forma clásica. El nombre “clásico” refleja este hecho. La forma serie tiene una interpretación atractiva en el dominio de la frecuencia, ya que los ceros corresponden a los valores inversos de los tiempos derivativo e integral. Todos los ceros del controlador son reales. Las acciones integral o proporcional puras no pueden ser obtenidas con valores finitos de los parámetros del controlador..
(31) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO 1. 𝐺´(𝑠) = 𝐾´ (1 + 𝑠𝑇´ ) (1 + 𝑠𝑇´𝑑 ) 𝑖. 22. (1.2). Dónde: 𝐾 = 𝐾´. 𝑇´𝑖 + 𝑇´𝑑 𝑇´𝑖. 𝑇𝑖 = 𝑇´𝑖 + 𝑇´𝑑. 𝑇𝑑 =. 𝑇´𝑖 𝑇´𝑑 𝑇´𝑖 + 𝑇´𝑑. 1.5 Antecedentes de entrenadores En el mundo se han implementado varios proyectos para desarrollar la función de entrenamiento (Dolang, 2017), algunos de ellos son: Entrenador de circuito digital/análogo: Modelo DLDZ-165E. Está compuesto por una plataforma de manipulación, pantalla de visualización, caja de energía, zona para ubicar dibujos, zonas experimentales electrónicas digitales y análogas y un área para ubicar el osciloscopio Entrenador de experimento de microcontrolador y de experimento de control de movimiento: Modelo DLDP-YDKZ 51 emplea una estructura modular. Por medio de este sistema puede determinar el control de dirección de movimiento, el control de velocidad de movimiento, el control de posicionamiento y la limitación de movimiento y monitorizar cambios en estas variables. Entrenador de instalaciones electrónicas: Modelo DLDZ-ZJG03, está dividido en tres áreas; área de prueba y mantenimiento, área de instalación y soldado y área de producción. El suministro de energía de cada área es independiente del otro y cada área posee un HMI especializado en su función.. 1.6 Consideraciones finales del capítulo La supervisión y control a distancia de variables de procesos industriales mediante sistemas SCADA, constituye un elemento imprescindible para desarrollar la automatización en la.
(32) CAPÍTULO 1. SISTEMAS SCADA EN ENTRENADORES DE PROCESO. 23. actualidad. La comunicación entre los novedosos software de supervisión y los dispositivos de campo posibilitan el control de procesos complejos en los que intervienen un gran número de variables. Los diferentes software que se utilizan para elaborar los sistemas SCADA ofrecen una variada gama de herramientas para el procesamiento de los datos, cada una se especializa en una parte del sistema. Sobresale la utilidad del software LabVIEW para la sintonización de reguladores por los diferentes paquetes de herramientas que brinda, especializados en el desarrollo de la teoría del control. El software Movicon se destaca por las herramientas que brinda para la creación del HMI del sistema que facilitan el trabajo del desarrollador y la manipulación del operador, también por los sistemas de alarma y la forma de manejar los datos en forma de históricos para su almacenamiento y procesamiento. Mediante la supervisión de estos procesos en tiempo real se brinda la posibilidad de ejecución de buenas prácticas y entrenamiento en tiempo real. Es evidente la adquisición de conocimientos y habilidades con el desarrollo de prácticas seguras. Por eso se pudieran diseñar e implementar nuevas herramientas de entrenamiento a partir de diferentes técnicas de control..
(33) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 24. CAPÍTULO 2. Diseño del Entrenador SAD-100. En el presente capítulo se abordan las partes del diseño del sistema Entrenador SAD-100. Se caracterizan y se configuran cada uno de los elementos que lo componen. Se abordan temas como el uso de los Instrumentos Virtuales o software elaborados mediante LabVIEW y la creación de Interfaces Humano-Máquina mediante el software Movicon. Se realiza además la comunicación mediante OPC de las aplicaciones del sistema. 2.1 Caracterización del proceso El sistema Entrenador SAD-100 está compuesto por un grupo de elementos de hardware y software orientados a una función específica dentro del sistema en general. El sistema responde al control de velocidad de un servomecanismo de corriente directa que se pretende supervisar de forma continua de manera real y simulada. El entrenador permite la variación del comportamiento de la velocidad del motor mediante una interfaz gráfica que brinda al usuario la posibilidad de realizar cambios en estos parámetros. 2.1.1 Instrumento virtual HSW16/17 Se utiliza el VI HSW16/17 (Herramienta de Software 2016/2017), que se desarrolló en la asignatura Herramienta de Software para el Control de la carrera Ingeniería en Automática durante el curso 2016 – 2017 para estudiantes de último año de la especialidad; como base para la creación del Entrenador SAD-100. El VI HSW16/17 posee la arquitectura que se muestra en la Figura 2.1..
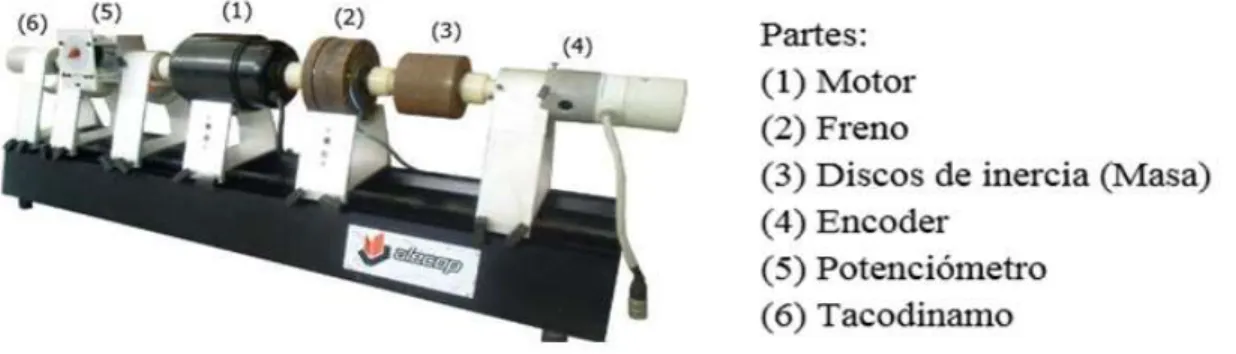
(34) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 25. Figura 2.1 Arquitectura del VI HSW16/17. 2.1.2 Servomecanismo ALECOP SAD-100 El VIHSW16/17 utiliza al servomecanismo SAD-100 como planta para la automatización. La planta en estudio es un motor de corriente directa (CD) modelo ALECOP SAD-100 como se muestra en la Figura 2.2.. Figura 2.2 Motor de corriente directa ALECOP SAD-100 El motor utiliza un amplificador que lo antecede, que posibilita que la señal de mando necesaria no sea muy grande. Se conoce el modelo del sistema, es decir, del amplificador y el motor de forma conjunta (Fernández, 2008). El modelo está dado por la ecuación 2.1: 𝑉𝑒𝑙(𝑠) 𝐾 = 𝑉𝑎(𝑠) 𝜏𝑠 + 1 Dónde: 𝑉𝑒𝑙: Velocidad del motor 𝑉𝑎: Voltaje de armadura aplicado al motor. (2.1).
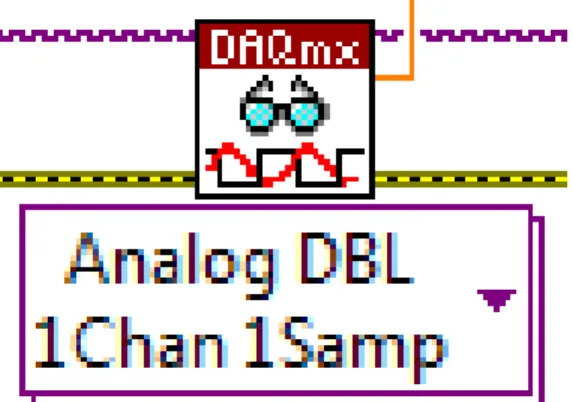
(35) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 26. 𝐾: Ganancia del sistema 𝜏: Constante de tiempo del sistema 2.1.3 Tarjeta de adquisición de datos DAQ Se configura la tarjeta de adquisición de datos DAQ NI USB-6212 en la PC para utilizarse como medio de comunicación entre el software LabVIEW y el servomecanismo ALECOP SAD-100. Se instala el softwareNI-DAQmx que viene adjunto a la tarjeta de adquisición de datos y de esta forma queda lista para su uso. Se instalan funciones para el trabajo con la tarjeta como son Canales I/O analógicos y Canales I/O digitales. La Figura 2.3 muestra un ejemplo de una función para obtener el valor de entrada de una sola muestra de un canal.. Figura 2.3 Ejemplo de función de LabVIEW para el uso de DAQ NI USB-6212. 2.1.4 Controlador El controlador PID es uno de los controladores más usados, el algoritmo de cálculo del mismo se da en tres parámetros distintos: el proporcional, el integral, y el derivativo. Este se distingue por tener gran exactitud y ser utilizado en aplicaciones cruciales de la industria. En el VI HSW16/17 el controlador PID se representa de las formas estándar o no interactiva, serie o interactiva y la forma paralela. Se utiliza el módulo que ofrece el LavBIEW para la configuración de reguladores. El usuario puede seleccionar una de las tres modificaciones del control PID mediante un menú desplegable y observar la ecuación de dicha topología. Este puede elegir los valores de ajustes del controlador seleccionado para controlar el proceso que desee automatizar, ver Figura 2.4..
(36) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 27. Figura 2.4 Estructura del controlador PID 2.1.5 Aplicación desarrollada mediante LabVIEW El software realizado en LabVIEW, HSW16/17, posee un menú de navegación en la parte superior de la interfaz para las funciones de Identificación, Control Supervisorio y Control Digital Directo del servomecanismo, ver Figura 2.5.. Figura 2.5Menú de Navegación de HSW16/17 Funciones de HSW16/17. Identificación: Función que permite determinar la ganancia del tacodinamo y la constante de tiempo de la planta y obtener así los valores de su ecuación característica. La forma a proceder consiste en aplicar una señal tipo paso a la entrada del actuador del sistema (Alimentación SAD100), y se obtiene la señal del tacodinamo por un tiempo determinado. Este proceso puede aplicarse con diferentes períodos de muestreo y con diferente número de muestras. Los datos se procesan de forma automática y se obtienen así los valores anteriores que definen la ecuación de la planta para el control de forma simulada, ver Figura 2.6..
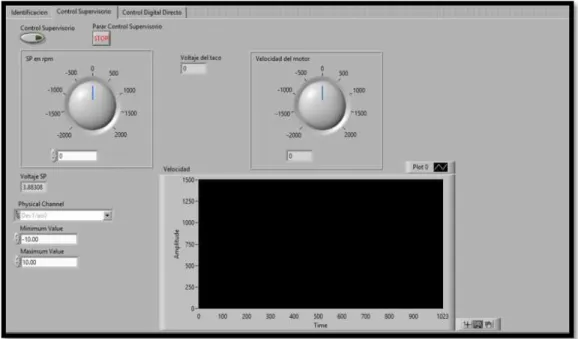
(37) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 28. Figura 2.6 Interfaz para la identificación de HSW16/17 Control supervisorio: Función que permite supervisar el desarrollo del motor ALECOP SAD-100 en lazo abierto. Se introduce el valor deseado de velocidad y se arranca el motor. Se supervisa de forma constante la velocidad real a la que gira el servomecanismo ALECOP SAD-100 y el voltaje equivalente a esta velocidad que proporciona el tacodinamo, de forma numérica y gráfica a la vez, ver Figura 2.7.. Figura 2.7 Interfaz para el control supervisorio de HSW16/17.
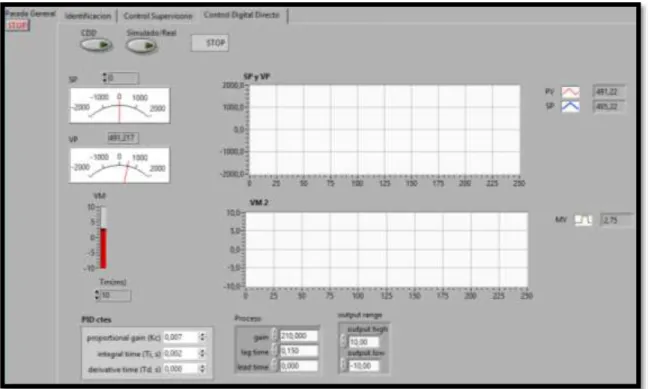
(38) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 29. Control digital directo: Función que permite analizar el comportamiento del servosistema en lazo cerrado de forma real, al trabajar con el motor ALECOP SAD-100; y de forma simulada con los datos de la planta obtenidos en la función de Identificación. Muestra el comportamiento del mando y del valor medido de forma continua, mediante indicadores numéricos y gráficas. Mediante esta función se pueden variar los parámetros del controlador PID y de esta forma obtener diferentes respuestas del proceso de forma real y simulada para su posterior análisis, ver Figura 2.8.. Figura 2.8 Interfaz para el control digital directo de HSW16/17 2.2 Diseño del sistema Entrenador SAD-100 El Entrenador SAD-100 es un proyecto que se compone de dos etapas. En la primera se realiza un estudio detallado del VI HSW16/17. En la segunda etapa se elabora el HMI mediante el software Movicon y se establece la comunicación entre las dos aplicaciones (LabVIEW - Movicon), mediante OPC..
(39) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 30. 2.2.1 Arquitectura del Entrenador SAD-100 La arquitectura diseñada asegura el control y supervisión el proceso desde la misma computadora con el software Movicon y el software LabVIEW HSW16/17 de forma simultánea o desde otra computadora mediante protocolo TCP/IP(Protocolo de Control de Transmisión/Protocolo de Internet), para enlazar las mismas desde una red de área local (LAN),ver Figura 2.9. La comunicación entre las aplicaciones se realiza mediante OPC y la comunicación entre el servomecanismo y el software LabVIEW, mediante una tarjeta de adquisición de datos DAQ. Intervienen en el sistema este grupo de elementos de hardware y software que en su conjunto conforman el sistema.. Figura 2.9 Arquitectura del entrenador 2.2.2 HMI del Entrenador SAD-100 Para la elaboración del HMI del Entrenador ALECOP SAD-100 se utiliza el software Movicon. Este software hace ameno el proceso de entrenamiento ya que posibilita la creación de un grupo de sinópticos o pantallas que pueden enlazarse entre sí, se aporta rapidez y eficacia en el uso del Entrenador SAD-100 una vez concluida la aplicación. Se implementan en el Entrenador SAD-100 cinco sinópticos, ver Figura 2.10..
(40) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 31. Figura 2.10 Sinópticos del Entrenador SAD – 100 Cada sinóptico del Entrenador SAD -100 posee un grupo de elementos orientados a crear una eficiente interfaz de usuario. En la parte superior de cada uno se encuentra una imagen como Banner, ver Figura 2.11, que define el objetivo de la aplicación.. Figura 2.11 Banner del Entrenador ALECOP SAD-100 La parte derecha de la interfaz está definida como área de ayuda, allí se encuentra un acceso al sinóptico ALECOP SAD-100,ver Figura 2.12, donde se muestran los datos de la planta en estudio (Servomecanismo ALECOP SAD-100); para un mayor conocimiento de la misma.. Figura 2.12 Sinóptico ALECOP SAD-100.
(41) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 32. En esta parte de la aplicación se encuentra también un área que cambia su contenido de acuerdo al sinóptico que se encuentre en ejecución, donde se explica el objetivo de la función de entrenamiento activada, ver Figuras 2.13 y 2.14.. Figura 2.13 Ayuda para el Control Supervisorio. Figura 2.14 Ayuda para el Control Digital Directo Se utilizan diferentes elementos predefinidos que brinda el toolbox del software Movicon, ver Figuras 2.15, 2.16, para la realización de la interfaz como son: . Gráficos horizontales. . Cuadros para mostrar valores. . Botones. . Cambiadores de estado. . Interruptores.
(42) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. . Indicadores numéricos. . Formas básicas de dibujo. . Textos e Imágenes. 33. Figura 2.15 Sinóptico para el Control Supervisorio. Figura 2.16 Sinóptico para el Control Digital Directo El Entrenador ALECOP SAD-100 registra además, datos históricos del comportamiento de la planta en lazo cerrado y activa alarmas para un rango de sus valores de velocidad. Se definen alarmas de velocidad como por ejemplo Low para valores de la variable VP menores o igual que -1500 rpm y High para los valores de VP mayores o igual que 1500 rpm, ver Figura 2.17..
(43) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 34. Figura 2.17 Registro de datos históricos y definición de alarmas del proceso en lazo cerrado 2.2.3 Modificaciones al VI HSW16/17 Se realizaron modificaciones al VI HSW16/17 para obtener otros parámetros necesarios para el control de la planta. Se realizó el cálculo del error en estado estable del comportamiento del motor y así registrar estos datos. La obtención del error en estado estable está dada por la ecuación 2.2: 𝐸𝐸𝐸𝑟𝑟𝑜𝑟 =. 𝑆𝑃 − 𝑉𝑃 ∗ 100 𝑆𝑃. (2.2). Donde: 𝐸𝐸𝐸𝑟𝑟𝑜𝑟: Error en estado estable 𝑆𝑃: Set Point 𝑉𝑃 =: Velocidad actual del motor Se implementa la ecuación 2.2 en el software LabVIEW mediante el lenguaje gráfico de programación que brinda la aplicación, ver Figura 2.18..
(44) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 35. Figura 2.18 Ecuación para el cálculo del error en estado estable implementada con el lenguaje gráfico de LabVIEW 2.2.4 Comunicación entre las aplicaciones Para establecer la comunicación entre la aplicación LabVIEW y la aplicación Movicon se deben seleccionar las variables a comunicar. Deben tenerse en cuenta el tipo de variable y su tamaño para que exista compatibilidad al enviar y recibir los valores de las mismas de una aplicación hacia la otra. En el Anexo I se muestran las variables a comunicar que intervienen en el proceso con su caracterización. La comunicación se establece en ambos sentidos y se definen de forma adecuada las variables en: variables de solo lectura o variables de lectura y escritura. Estas variables se definen en el softwareMovicon. Para establecer la comunicación se activa el softwareMovicon como servidor OPC. En el explorador del proyecto se accede a RealTimeDB(Base de Datos en Tiempo Real) y se modifican sus propiedades al activar la opción OPCServerDA, ver Figura 2.19. Se procede a declarar las variables con sus propiedades correspondientes y a publicarlas en el servidor OPC al modificar su propiedad EnableOPCServer, ver Figura 2.20. Se realiza este procedimiento con cada variable que se desee compartir con HSW16/17. Las variables quedan a disposición de cualquier cliente en la red que solicite sus valores..
(45) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 36. Figura 2.19 Propiedades de Real Time DB. Figura 2.20 Variable ControlSupervisorioState publicada en el OPC server Para completar el proceso de comunicación se accede a las propiedades de la variable correspondiente en HSW16/17 y se ejecuta el panel Data Binding. Se selecciona DataSocket que constituye la forma básica de comunicación con un servidor OPC. Se elige la propiedad de la variable: lectura o lectura y escritura como se desee en cada caso. Para finalizar se selecciona la variable que fue publicada en el software Movicon y se muestra su dirección asociada en la red de forma automática, ver Figura 2.21. Los valores que adquieren las variables que describen el sistema son enviados desde una aplicación hacia la otra en tiempo real. La conexión entre las mismas garantiza el control total del sistema desde cualquiera de las dos aplicaciones..
(46) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 37. Figura 2.21 Variable Control Supervisorio State conectada con HSW16/17 2.3 Supervisor cliente Se crea un HMI con la función de visualización que solo posee permisos de lectura para las variables del sistema, ver Figura 2.22. Se puede ejecutar en otra PC conectada a la red. Se leen así las variables publicadas en el servidor OPC mediante TCP/IP y accede a sus valores sin permisos de escritura, mediante las direcciones publicadas por el servidor. Solo posee gráficas, tablas e indicadores que brinda el software Movicon para la visualización de datos. Su uso queda restringido a la monitorización continua de la planta y del sistema simulado.. Figura 2.22 Diseño del supervisor cliente.
(47) CAPÍTULO 2. DISEÑO DEL ENTRENADOR SAD-100. 38. 2.4 Consideraciones finales del capítulo El software Movicon presenta entre sus principales características la posibilidad. de. registrar datos históricos sobre el comportamiento de la planta. Favorece así el análisis del servomecanismo ALECOP SAD-100 y del lazo de control de este proceso de forma detallada. Brinda la posibilidad de definir alarmas, que son fundamentales para la toma de decisiones del operador con el fin de anticipar o evitar daños al servomecanismo. El protocolo de comunicación OPC posibilita la fácil y rápida conexión entre las aplicaciones desarrolladas en LabVIEW y Movicon, constituye un estándar implementado en ambas. Aporta una alta interactividad a las aplicaciones y hace óptimo su funcionamiento. Las funciones de supervisión y entrenamiento son enriquecidas por las herramientas que brinda Movicon para la creación de un HMI dinámico y de fácil uso para el operador. Se ven fortalecidas también por la utilidad de los toolkit de LabVIEW para el control automático..
(48) CAPÍTULO 3. PRUEBAS AL ENTRENADOR SAD-100. CAPÍTULO 3.. 39. Pruebas al Entrenador SAD-100. Los entrenadores de procesos son utilizados con fines pedagógicos para fortalecer las materias relacionadas con la planta supervisada. En este capítulo se realizan pruebas al sistema Entrenador SAD-100 para comprobar su correcto funcionamiento. Se monitoriza mediante cambios en los parámetros del sistema el comportamiento del servomecanismo a través del VI HSW16/17 y del HMI del sistema. Se realizan pruebas tanto para la comunicación como para determinar las características que describen al servomecanismo SAD-100 y con ellas se abarcan todos los contenidos que recoge la presente investigación. 3.1 Prueba de comunicación mediante OPC El correcto funcionamiento del proceso de comunicación entre HSW16/17 y el HMI desarrollado en Movicon es fundamental para la supervisión y el entrenamiento. Una vez desarrolladas las aplicaciones a comunicar, el HMI y el VI para la supervisión de la planta y el ajuste del controlador PID, se conectan todas las partes del sistema. Se utilizan dos canales de salida y dos canales de entrada de la tarjeta de adquisición de datos multifuncional de la National Instruments NI USB-6212, con una frecuencia de muestreo de hasta 40000 muestras por segundo como se muestra en la Taba 3.1. Se procede a monitorizar el funcionamiento de la comunicación. Cuando se establece la comunicación entre las variables analizadas, en el VI HSW16/17 aparece un led junto a cada una de las variables gráficas de la aplicación, ver figura 3.1..
(49) CAPÍTULO 3. PRUEBAS AL ENTRENADOR SAD-100. 40. Tabla 3.1 Conexión a la tarjeta NI USB-6212 No. de Pin. Nombre. Tipo. Descripción. 12. AO0. Señal diferencial. Salida conectada al actuador. 14. AOGND. 17. AI1. Tierra del sistema Señal diferencial. Entrada analógica conectada al tacodinamo. AI9. 18. Tierra del sistema. Figura 3.1 Control digital directo con la comunicación establecida El color verde de los led indica la correcta comunicación de las variables gráficas de LabVIEW con las variables definidas en el software Movicon y el color rojo que existen errores en el proceso de comunicación. Se comunican tanto las variables para la navegación Control Digital Directo State y CDD Simulado Real como las variables que describen al servomecanismo SP, VP, VM, Kc, Ti, Td, EEError.. De esta forma se verifica la. comunicación en cada función del Entrenador SAD-100. El uso de OPC para la comunicación permite el correcto funcionamiento del sistema y es una herramienta fiable para lograr el intercambio de datos desde una aplicación hacia la otra en ambos sentidos..
(50) CAPÍTULO 3. PRUEBAS AL ENTRENADOR SAD-100. 41. 3.2 Prueba de identificación experimental Para el proceso de identificación experimental se aplica una señal tipo paso al actuador del servomecanismo. La señal aplicada posee magnitudes de 2 y 7 volt para las partes baja y alta de la señal. Se introducen los valores en HSW16/17 y se lee el voltaje del tacodinamo de forma numérica al activar la opción de medir, como se muestra en la Figura 3.2.. Figura 3.2 Comportamiento del motor ante una señal tipo paso de forma numérica El comportamiento de la velocidad del sistema sin filtrar y filtrada queda registrado también de forma gráfica como se muestra en las Figuras 3.3 y 3.4.. Figura 3.3 Comportamiento del motor ante una señal tipo paso sin filtraje de forma gráfica.
(51) CAPÍTULO 3. PRUEBAS AL ENTRENADOR SAD-100. 42. Figura 3.4 Comportamiento del motor ante una señal tipo paso con filtraje de forma gráfica Se tomaron 10000 muestras a una frecuencia de 10K Hz, lo que representa un período de muestreo fue de 100 microsegundos. Se seleccionan estos valores para la prueba después de repetirla varias veces con el objetivo de que en las gráficas quede registrado de forma íntegra el comportamiento del sistema. Se procede a activar la opción de Identificar después de registrado el comportamiento del servomecanismo ante la entrada paso. La identificación de la planta se desarrolla de forma automática con el uso de códigos de MatLab implementados de forma interna dentro de la función de Identificación. La ganancia del sistema y la constante de tiempo quedan plasmadas en pantalla como se muestra en la Figura 3.5. La identificación del proceso arrojó 261 rpm/volt como la ganancia del tacodínamo y 0,51 seg para la constante de tiempo del sistema. Los valores hallados, describen la planta y se encuentran en el rango de valores de otros servomecanismos con características similares que se describen en la literatura relacionada a este tema, por lo que el proceso de identificación se realiza de forma correcta..
Figure


+7




Documento similar