Detección e identificación de fallos en sensores para el HRC AUV
77
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingenierı́a Eléctrica Departamento de Automática y Sistemas Computacionales. Trabajo de Diploma. Detección e identificación de fallos en sensores para el HRC-AUV Tesis presentada en opción al grado de Ingeniero en Automática Autor: Sergio Emil Samada Rigó email: [email protected] Departamento de Automática y Sistemas Computacionales, FIE, UCLV. Tutor: M.Sc. Yidier Rodrı́guez Pérez de Alejo email: [email protected] Departamento de Automática y Sistemas Computacionales, FIE, UCLV. Santa Clara 2012 “Año 54 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingenierı́a en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Sergio Emil Samada Rigó Autor. Fecha. Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Sergio Emil Samada Rigó Autor. Fecha. Boris L. Martı́nez Jiménez, Dr. Jefe del Departmento. Fecha. Angel E. Rubio Rodrı́guez, Dr. Responsable de Información Cientı́fico-Técnica. Fecha.
(4) Dedicatoria. A mi mamá, Dámaris, quien con su ejemplo, amor y dedicación supo despertar en mı́ el deseo y la fuerza para formarme como profesional.. A mis abuelos, Blanca y Charles, mi inspiración. Afortunado de tenerlos juntos y cumplir sus sueños.. A mi papá, Sergio, que aunque lejos, siempre ha estado presente, brindándome aliento y cariño.. A mi hermana, Darisley, por estar junto a mı́ en el camino de la vida. Que este esfuerzo le sirva de inspiración en el futuro que tiene por construir.. A mi tı́o, Carlos, quien con su apoyo incondicional ha sido capaz de guiarme y transmitirme sus conocimientos, convirtiéndole esto en un paradigma en mi vida.. ii.
(5) Agradecimientos Este trabajo, da por culminado un perı́odo de gran significación para mı́, cinco años de esfuerzo, entrega y perseverancia. En dicho tiempo no son pocas las personas que se han aproximado brindándome su apoyo e ideas, las cuales han influido para bien en mi formación como profesional. En primer lugar quiero agradecer a mi tutor Yidier, quien nunca escatimó esfuerzos para brindarme su excepcional conocimiento, ayuda, orientación y amistad; por darme la oportunidad de trabajar con él. A todos los profesores del Departamento de Automática de la UCLV, a ellos les debo gran parte de mi formación, especialmente a Valeriano, quien dedicó parte de su tiempo para contribuir al desarrollo de este trabajo. A mis compañeros de aula, especialmente a Yaimara, Yenier, Ernesto, Denis, Jesús, Alexei y Erik, con ellos he compartido momentos de alegrı́a y tristeza durante los años de estudio además de contar con su apoyo. A mis amigos de siempre: Maday, Lainer, Rachael, Yahirenis, Félix, Dayaniris y Jennifer, de ellos he recibido gran afecto y es un privilegio para mı́ contar con su amistad. A mi familiares todos, sin ellos serı́a imposible hacer realidad cualquier sueño, desde pequeño han llenado mi vida dándole un sentido especial. A ellos le estaré eternamente agradecido. Sergio Emil. Santa Clara, 2012.. iii.
(6) Resumen Los vehı́culos autónomos subacuáticos (AUVs, del inglés), se han convertido mundialmente en una herramienta poderosa para la exploración submarina y la navegación. Para Cuba, por su condición de isla, la investigación y explotación de los recursos marinos es una cuestión de gran importancia económica y cientı́fica. Por ello se lleva a cabo un proyecto de investigación que tiene como meta la obtención de un prototipo de AUV cubano (HRC-AUV). Particularmente, este trabajo, se enmarca en el desarrollo de un sistema de detección e identificación de fallos en sensores para el vehı́culo y basado en su modelo dinámico. Para diseñar el sistema de detección e identificación de fallos se adapta el modelo disponible del móvil, con el fin de sintetizar un observador de estado que permita generar los residuos. A estos residuos además se le aplican pruebas estadı́sticas, las cuales hacen posible evaluar fallos producidos. Como resultado se obtiene un modelo linealizado en espacio-estado que refleja con buena exactitud la dinámica del submarino. Igualmente se logran detectar fallos abruptos e incipientes con gran precisión a partir de los residuos generados. Como herramienta para la simulación y el cálculo se utiliza el software MATLAB.. iv.
(7) Índice general Dedicatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. II. Agradecimientos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. III. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. IV. Índice general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. V. Índice de figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. VII. Índice de tablas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. IX. 1. Introducción . . . . . . . 1.1. Situación problémica . 1.2. Objetivos . . . . . . . 1.3. Estructura del informe. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. 1 3 4 5. 2. Revisión Bibliográfica . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Definición de fallos y tolerancia a fallos . . . . . . . . . . . . . . . . . . 2.3. Métodos generales de detección e identificación de fallos basados en redundancia analı́tica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4. Métodos de generación de residuos . . . . . . . . . . . . . . . . . . . . 2.5. Arquitectura general del sistema. . . . . . . . . . . . . . . . . . . . . . 2.5.1. Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6. Conclusiones generales del capı́tulo . . . . . . . . . . . . . . . . . . . .. 6 6 7 10 13 17 18 19. 3. Modelado del vehı́culo autónomo subacuático del CIDNAV . 3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Generalidades en el modelado de AUVs . . . . . . . . . . . . . . 3.2.1. Fuerzas que actúan en un AUV . . . . . . . . . . . . . . 3.2.2. Sistema de coordenadas y notación utilizada . . . . . . . 3.2.3. Ecuaciones dinámicas del movimiento . . . . . . . . . . . 3.3. Modelo de 6 GDL del HRC-AUV . . . . . . . . . . . . . . . . . 3.4. Cálculo de los parámetros del modelo de 6 GDL . . . . . . . . . 3.4.1. Identificación de parámetros dinámicos . . . . . . . . . . 3.5. Modelado de las perturbaciones marinas . . . . . . . . . . . . .. 21 21 22 22 23 25 26 30 31 31. v. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . .. . . . . . . . . . .. . . . .. . . . . . . . . . .. . . . .. . . . . . . . . . .. . . . . . . . . . ..
(8) Índice general. 3.6. 3.7. 3.8. 3.9.. 3.5.1. Modelado del oleaje . . . . . . . . . . . 3.5.2. Modelado de las corrientes . . . . . . . Validación del modelo de 6 GDL considerando corrientes marinas . . . . . . . . . . . . . . . . Obtención del modelo linealizado . . . . . . . Validación del modelo linealizado . . . . . . . Conclusiones generales del capı́tulo . . . . . .. . . . . . . . . . . el efecto . . . . . . . . . . . . . . . . . . . .. . . . . del . . . . . . . .. . . . . . . . . . . oleaje y . . . . . . . . . . . . . . . . . . . .. . . . . las . . . . . . . .. 32 33 34 35 39 43. 4. Detección e identificación de fallos . . . . . . . . . . . . . . . . . . . . 4.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Condición de observabilidad . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Observadores de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3.1. Diseño del observador con el modelo linealizado en espacio-estado del HRC-AUV . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3.2. Residuos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. Valoración económica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5. Conclusiones parciales . . . . . . . . . . . . . . . . . . . . . . . . . . .. 45 45 45 47. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 58. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 59. Referencias bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . .. 64. A.Parámetros geométricos e inerciales del HRC-AUV . . . . . . . . .. 65. vi. 49 51 56 57.
(9) Índice de figuras 2.1. Tipos de fallos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 7. 2.2. Redundancia de hardware y analı́tica . . . . . . . . . . . . . . . . . . .. 9. 2.3. Arquitectura de un sistema de control tolerante a fallos . . . . . . . . .. 10. 2.4. Representación de una neurona . . . . . . . . . . . . . . . . . . . . . .. 11. 2.5. Obtención de residuos en un sistema de detección e identificación de fallos 12 2.6. Principales técnicas de generación de residuos . . . . . . . . . . . . . .. 16. 2.7. Arquitectura de hardware del HRC-AUV . . . . . . . . . . . . . . . . .. 17. 3.1. Sistema de coordenadas, ángulos y velocidades . . . . . . . . . . . . . .. 24. 3.2. Simulación del modelo y la trayectoria obtenida con el GPS. . . . . . .. 35. 3.3. Simulación de los modelos de 6 GDL y 8 GDL sin incluir el efecto de las perturbaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 40. 3.4. Errores absolutos y cuadráticos medios de las variables de estado u,v, w yp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 41. 3.5. Errores absolutos y cuadráticos medios de las variables de estado q, r, φ yθ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 41. 3.6. Trayectoria descrita en el plano x − y . . . . . . . . . . . . . . . . . . .. 42. 3.7. Errores absolutos y cuadráticos medios de las variables de estado u, v, w yp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 42. 3.8. Errores absolutos y cuadráticos medios de las variables de estado q, r, φ yθ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 43. 4.1. Sistema con observador de estado de orden completo . . . . . . . . . .. 48. 4.2. Residuos de u, v, w y p en ausencia de sin fallos . . . . . . . . . . . . .. 51. 4.3. Residuos en q, r, roll y pitch en ausencia de fallos . . . . . . . . . . . .. 52. 4.4. Residuos de u, v, w y p en presencia de fallos abruptos . . . . . . . . .. 52. vii.
(10) Índice de figuras 4.5. Residuos de q, r, roll y pitch en presencia de fallos abruptos . . . . . .. 53. 4.6. Residuos de u, v, w y p en presencia de fallos incipientes . . . . . . . .. 53. 4.7. Residuos de q, r, roll y pitch en presencia de fallos incipientes . . . . .. 54. 4.8. Valores de los residuos introduciendo fallos en roll y pitch. . . . . . . .. 54. 4.9. Valores de los residuos introduciendo fallos en roll y pitch. . . . . . . .. 55. A.1. Parámetros geométricos e inerciales del HRC-AUV. . . . . . . . . . . .. 65. A.2. Parámetros geométricos e inerciales del HRC-AUV. . . . . . . . . . . .. 66. viii.
(11) Índice de tablas 3.1. Notación utilizada para AUVs. . . . . . . . . . . . . . . . . . . . . . . .. 24. 3.2. Actuadores y variables de control. . . . . . . . . . . . . . . . . . . . . .. 29. ix.
(12) Capı́tulo 1 Introducción El creciente avance de la tecnologı́a ha llevado al hombre a desarrollar sistemas autónomos en función de la economı́a y el estudio del entorno. Estos sistemas realizan operaciones complejas, en lugares de difı́cil acceso y con un alto nivel de eficiencia y seguridad, siendo capaces de cumplir los objetivos propuestos sin ninguna o con muy poca intervención humana. Los vehı́culos autónomos subacuáticos (AUVs, Autonomous Underwater Vehicles) forman parte de los vehı́culos sumergibles no tripulados (UUVs, Autonomous Unmanned Vehicles). Constituyen vehı́culos motorizados que se trasladan en un medio acuático, realizan diferentes misiones sin llevar a bordo operadores humanos y portan su propia fuente de energı́a. Su capacidad de navegación autónoma les permite ser programados con anticipación. Además, pueden ser dirigidos por controladores u operadores ubicados en estaciones para su monitoreo (Blidberg, 2001; Batlle, 2004a; Jaffe, 2001). En los últimos años los AUVs han adquirido gran auge como herramienta para la exploración submarina y la navegación (Aranda, 2005). Esto se debe fundamentalmente a que los recursos terrestres han ido en decremento mientras que rı́os y océanos (poblados de minerales, alimentos etc.) permanecen en su mayorı́a inexplorados. El desarrollo alcanzado, permite la inclusión de los AUVs en diversos campos o esferas de aplicación (Batlle, 2004b). Las aplicaciones van desde los planos cientı́ficos, medio ambientales e industriales hasta los militares. Constituyen ejemplos de lo anterior: los estudios geológicos y de la biologı́a marina, inspección de cascos de buques y tanques, comunicaciones submarinas, monitoreo de huracanes, instalación de minas marinas a poca profundidad entre otros. 1.
(13) Capı́tulo 1: Introducción De forma general, para lograr la ejecución de tareas de forma autónoma por parte de los AUVs, es necesario implementar un sistema de control automático (autopiloto) que gobierne los mandos del vehı́culo sin la participación humana (De-Avila, 2008). Aunque a nivel mundial existe abundante bibliografı́a e investigaciones referidas al tema, el desarrollo de un vehı́culo de este tipo necesita gran cantidad de recursos materiales y humanos. A grandes rasgos, el diseño de autopilotos para vehı́culos subacuáticos (especı́ficamente AUVs) tiende a seguir una metodologı́a. La misma consiste en desarrollar la arquitectura sensorial y de hardware, modelar analı́ticamente el vehı́culo (que incluye la identificación experimental) y posteriormente, basado en el modelo obtenido, diseñar el sistema de control y de navegación inercial (Martı́nez, 2010). Paralelamente a estas tareas es preciso desarrollar sistemas de software que permitan la comunicación de la información sensorial y la supervisión remota del vehı́culo, además implementar un sistema tolerante a fallos que asegure la ejecución de misiones. A nivel global, diversos centros de investigación e instituciones poseen avances notables en el campo del hardware y el software, los que contribuyen a que los vehı́culos submarinos autónomos cumplan numerosas funciones (Fossen, 2006; Liang, 2008; Jordán, 2008; Miskovic, 2008; Batlle, 2004a), sin embargo, estas tecnologı́as resultan sumamente caras. Entre las instituciones se destacan la “Universidad de Newcastle” en Australia (Pérez, 2008), la “Agencia de Ciencia y Tecnologı́a de Tierra y Mar” en Japón (Yoshida, 2008), la “Universidad Noruega de Ciencia y Tecnologı́a” (NTNU); esta última, refleja resultados sobresalientes publicados en artı́culos de gran calidad, especialmente los realizados por el profesor Thor I. Fossen (Hegrenaes, 2008; Hegrenses, 2007; Fossen, 1994, 2006, 2008). Para Cuba, la investigación y explotación de los recursos marinos es una cuestión de vital importancia económica y cientı́fica, las áreas de aplicación son diversas y abarcan desde la explotación pesquera, de minerales y petróleo hasta los estudios medio ambientales de la plataforma insular. A partir de esta necesidad, de forma conjunta, el Centro de Investigación y Desarrollo Naval (CIDNAV) y el Grupo de Automatización Robótica y Percepción (GARP) de la Universidad Central “Marta Abreu” de Las Villas, se han dado a la tarea de desarrollar un prototipo de AUV el cual lleva por nombre 2.
(14) Capı́tulo 1: Introducción HRC-AUV. Como parte de los estudios realizados hasta el momento, los miembros del GARP han obtenido resultados de gran connotación práctica y cientı́fica, destacándose entre ellos: la concepción de una arquitectura de hardware empotrado apropiada y con sensores de bajo costo (Martı́nez, 2010), la obtención del modelo dinámico del HRC-AUV (Cañizares, 2010) y estrategia de control de rumbo diseñada a partir del modelo del HRC-AUV (Cañizares, 2010; Hernández, 2011). Además, se han desarrollado los sistemas de software de comunicación, control y supervisión remota para la navegación en superficie o a baja profundidad (Martı́nez, 2010; Rodrı́guez, 2010, 2011a,b); estos resultados han sido validados y demostrados su funcionalidad. Es evidente que para alcanzar este prototipo de AUV quedan varios campos en los cuales trabajar, entre ellos: la disminución de trabajo en las estaciones de supervisión y control, el diseño de sistemas empotrados que permitan mayor sencillez en la gestión de la misión, el diseño de un sistema tolerante a fallos ası́ como el desarrollo del sistema de navegación. Según lo visto cabe destacar que la automatización del HRC-AUV resulta útil y de elevada complejidad. Especı́ficamente el tema referido al sistema tolerante a fallos se hace necesario en el desarrollo del prototipo, con el fin de conseguir un funcionamiento seguro del sistema.. 1.1.. Situación problémica. Durante las misiones submarinas los AUVs carecen de supervisión humana para la toma de decisiones eficaces ante fallos. Los fallos pueden estar dados por errores de posicionamiento en los timones, defectos en los actuadores, mal funcionamiento del hardware y/o software instalado entre otros. Todos estos factores pueden obstaculizar el correcto funcionamiento del sistema, por lo que se hace necesario disponer de un sistema capaz de detectar e identificar dichos fallos. El problema cientı́fico está dado en cómo implementar un sistema capaz de detectar e identificar fallos y que contribuya a que el HRC-AUV ejecute de forma segura 3.
(15) Capı́tulo 1: Introducción misiones submarinas. De lo expuesto anteriormente surgen las interrogantes cientı́ficas siguientes: ¿Qué elementos de hardware o software pueden introducir fallos dentro del sistema en una misión submarina? ¿Es posible detectar fallos a partir del modelo actual del HRC-AUV ? ¿Qué herramienta es factible implementar para la generación de residuos en el proceso de detección? ¿Cómo identificar los fallos a partir de la información obtenida analı́ticamente?. 1.2.. Objetivos. El objetivo general de este trabajo consiste en desarrollar un sistema de detección e identificación de fallos en sensores para el HRC-AUV y basado en su modelo dinámico. Como objetivos especı́ficos se definen: Analizar las tendencias globales referentes a los sistemas tolerantes a fallos y métodos de implementación. Adaptar el modelo dinámico del HRC-AUV para su utilización en el proceso de detección. Diseñar el sistema de detección de fallos empleando técnicas de estimación. Simular el sistema de detección utilizando datos reales obtenidos en experimentos previos del HRC-AUV. Evaluar el comportamiento de los residuos ante fallos introducidos. Con este proyecto se pretende dar los primeros pasos en la implementación de un sistema tolerante a fallos en sensores para el HRC-AUV. Esta primera parte incluye solamente el sistema de detección e identificación, lo que constituye un aporte significativo para el desarrollo del proyecto conjunto GARP-CIDNAV. 4.
(16) Capı́tulo 1: Introducción. 1.3.. Estructura del informe. El trabajo de diploma, posterior a este capı́tulo introductorio, está compuesto por tres capı́tulos de contenido, conclusiones, recomendaciones, referencias bibliográficas y finalmente los anexos. A continuación se resumen los aspectos tratados en cada capı́tulo de contenido: Capı́tulo 1 Se realiza el análisis de la literatura cientı́fica y otras fuentes especializadas relacionadas con los sistemas tolerantes a fallos, haciéndose énfasis en vehı́culos autónomos. Se exponen los conceptos generales a tratar en la investigación y se identifican los principales mecanismos de implementación de sistemas tolerantes a fallos. Finalmente, se define el método a utilizar en la obtención de residuos para el sistema de detección de fallos del HRC-AUV y se presenta la arquitectura del hardware instalado en el vehı́culo. Capı́tulo 2 Se expone un resumen del modelo dinámico del HRC-AUV presentado en los trabajos de diploma de J. Cañizares y H. Zamora. También se muestra la versión lineal en espacio-estado obtenida a partir del modelo no lineal, con el fin de diseñar el observador de estado. Finalmente se comprueba mediante simulaciones el desempeño del modelo linealizado. Capı́tulo 3 Se ilustran los resultados alcanzados con el sistema de detección e identificación de fallos. Primeramente se expone la condición suficiente y metodologı́a a seguir para el diseño de observadores de estado. Luego se calculan los parámetros del observador a través del MATLAB y se determinan los residuos a utilizar en el proceso de detección. Por último se muestra la respuesta del sistema ante la presencia de fallos y se da una valoración económica general de la investigación.. 5.
(17) Capı́tulo 2 Revisión Bibliográfica 2.1.. Introducción. Con el paso de los años y el desarrollo de la tecnologı́a, los requisitos impuestos a los sistemas de control se han hecho cada vez más exigentes. En general, la búsqueda de seguridad y eficiencia ha impulsado el auge de nuevas técnicas de análisis y sı́ntesis de controladores. Uno de los retos frecuentes con que se encuentra la ingenierı́a del control, es el de mantener condiciones de estabilidad y desempeño ante daños en los elementos del sistema. Para aquellos en los que la seguridad es significativa, como es el caso de los AUVs, existe una necesidad creciente de supervisión en lı́nea para la identificación y diagnóstico automático de fallos. Esto tiene como objetivo incrementar la fiabilidad, teniendo en cuenta que los sı́ntomas que presentan los fallos en desarrollo pueden ayudar a evitar fallos irreversibles como caı́das del sistema, lo cual trae consigo pérdidas económicas y afectaciones medio ambientales. La tolerancia a fallos ha adquirido gran auge en la sociedad moderna, lo que se debe a la proliferación de los sistemas de cómputo y el uso de éstos en diversos campos de aplicación. Los sistemas tolerantes a fallos emergen en la actualidad como una alternativa necesaria para el ahorro económico y el funcionamiento seguro de los vehı́culos autónomos. En la literatura especializada existen diversos trabajos que abordan temas referentes a sistemas tolerantes a fallos para AUVs. En este capı́tulo se analizan las tendencias principales.. 6.
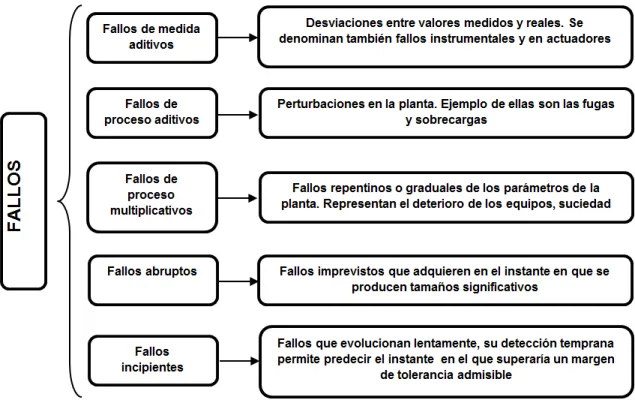
(18) Capı́tulo 2: Revisión Bibliográfica. 2.2.. Definición de fallos y tolerancia a fallos. El calificativo “fallo” se enmarca dentro de un universo fı́sico. Se concibe como la desviación no permitida en al menos una propiedad caracterı́stica o parámetro del sistema, que lo aparta de la situación aceptable, habitual o estándar; de manera que éste ya no pueda satisfacer la función para la cual ha sido diseñado. Según esta definición, también puede ser extendido al término cambio (Blanke, 2000; Isermann, 2004). Los fallos pueden ocurrir debido a cambios de modo de operación (suponiendo disı́miles modos de operación en el proceso en cuyo caso no hay ningún elemento fallido en el sistema), o debido a un mal funcionamiento que ocurra en los sensores, actuadores o en el propio sistema. La Figura 2.1 muestra los tipos de fallos que pueden ocurrir y como se manifiestan (Peña, 2004).. Figura 2.1: Tipos de fallos. Se define entonces la tolerancia a fallos como la capacidad de un sistema de control para mantener sus objetivos a pesar de la aparición de un fallo o desviación, admitiéndose cierta degradación de sus prestaciones pero manteniéndose siempre un comportamiento estable del sistema (Puig, 2004; Zhang, 2008). 7.
(19) Capı́tulo 2: Revisión Bibliográfica La tolerancia a fallos en sistemas dinámicos es frecuentemente lograda a través de la comparación de variables medidas del proceso con valores lı́mites constantes y preestablecidos (chequeo de umbrales), o la aplicación de redundancia paralela, también conocida como redundancia de hardware (Yang, 1999). El uso de la redundancia paralela o redundancia de hardware consiste en colocar componentes fı́sicos (sensores y actuadores) en configuración redundante triple o cuádruple (generalmente números impares), comparar las salidas de los elementos redundantes y con un análisis de consistencia de los datos obtenidos se logra detectar la presencia de fallos, ası́ como la localización de los mismos (Ni, 2001; Peiravi, 2009; Hallouzi, 2008). Por consiguiente, se declara un elemento en fallo cuando su señal se desvı́a notablemente del promedio de valores de los otros elementos, asumiendo que los demás permanecen dentro de un rango pequeño uno de otro. La redundancia paralela protege al sistema de control contra componentes en fallos de una forma pasiva; o sea, los controladores son fijos y diseñados para ser robustos ante determinados fallos previamente considerados (Zhang, 2008; Patton, 1997). Esto trae como consecuencia una capacidad limitada de tolerancia ante fallos. Igualmente, tiene como desventaja el incremento en el costo del hardware redundante y el peso, ası́ como el espacio requerido para acomodar el equipamiento. Para la implementación del sistema de tolerancia a fallos al HRC-AUV la utilización de la redundancia de hardware está descartada, constituyendo la principal razón, los costos de adquisición del esquema sensorial redundante. Con la evolución de las computadoras digitales, los sistemas tolerantes a fallos usando redundancia analı́tica han emergido como alternativa práctica ante la redundancia de hardware. La redundancia analı́tica es básicamente una técnica de procesamiento de señales que se basa en la estimación de estados y de parámetros, filtros adaptables, umbral lógico variable, teorı́a de decisión estadı́stica y operaciones lógicas y combinacionales. Los métodos basados en la redundancia analı́tica mejoran la capacidad de tolerancia a fallos de los sistemas y no agregan componentes adicionales de hardware, solo incrementan los niveles de cómputo (Ni, 2001; Blázquez, 2003; Hallouzi, 2008). Para implementar estos métodos, es suficiente una computadora con mayor capacidad de procesamiento 8.
(20) Capı́tulo 2: Revisión Bibliográfica y almacenamiento de información. La Figura 2.2 ilustra los conceptos de redundancia de hardware y analı́tica.. Figura 2.2: Redundancia de hardware y analı́tica. Según la literatura consultada, un sistema de control tolerante a fallos basado en la redundancia analı́tica consta de tres subsistemas (Ni, 2001; Puig, 2004; Blázquez, 2003; Acuña, 2008; Yang, 1999): subsistema de detección de fallos: es una función de alto nivel que monitorea todo el sistema y detecta la ocurrencia de fallos. subsistema de identificación de fallos: localiza el elemento fallido y calcula la magnitud y tiempo en que ocurrió el fallo. subsistema de reconfiguración: reestructura o reconfigura la ley de control, permite al sistema seguir funcionando adoptando un comportamiento degradado pero estable del sistema a pesar de los fallos. Esta investigación se centra solamente en el desarrollo de los subsistemas de detección e identificación de fallos (en la literatura también se suele agrupar ambos subsistemas en uno solo). La Figura 2.3 muestra la arquitectura de un sistema de control tolerante a fallos basado en la redundancia analı́tica.. 9.
(21) Capı́tulo 2: Revisión Bibliográfica. Figura 2.3: Arquitectura de un sistema de control tolerante a fallos. 2.3.. Métodos generales de detección e identificación de fallos basados en redundancia analı́tica. La redundancia analı́tica fue introducida como concepto en la década del 70 del siglo pasado y complementa los resultados disponibles de los métodos basados en la redundancia fı́sica. Según la literatura, la redundancia analı́tica se basa en el conocimiento del modelo matemático que expresa las relaciones analı́ticas del sistema en cuestión, ası́ como la interconexión dinámica de las señales de entrada y de salida de este (Alcorta, 2001; Blázquez, 2003). Diferentes métodos de detección e identificación fueron propuestos y sujetos a fuerte investigación en el último cuarto del siglo XX. Todo esto ha permitido contar en la actualidad con procedimientos bien establecidos y de probada validez. Para lograr una mayor comprensión del tema, es conveniente dividir las técnicas basadas en la redundancia analı́tica en dos grupos: aquellas que emplean un modelo matemático del sistema o proceso y las que emplean un modelo no obtenido a partir de las leyes de la fı́sica, sino a partir de procedimientos comúnmente utilizados en la inteligencia artificial (Alcorta, 2001; Yang, 1999). Los métodos que no usan el modelo de la planta son utilizados en sistemas de gran escala donde la elaboración de un modelo es complejo y consume mucho tiempo. En (Stengel, 1991) se muestra una buena reseña relacionada con los sistemas de control tolerantes a fallos usando sistemas expertos y redes neuronales artificiales. Los sistemas expertos representan el conocimiento de los especialistas en forma 10.
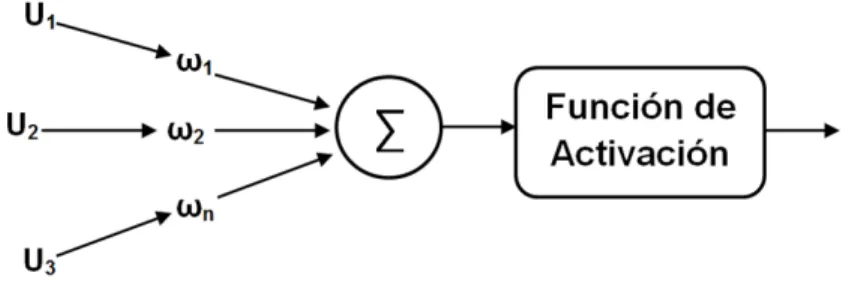
(22) Capı́tulo 2: Revisión Bibliográfica de reglas, relacionando los sı́ntomas con las causas que los han provocado e incluso pueden ofrecer soluciones o recomendaciones. Estos sistemas ofrecen una manera útil de control tolerante a fallos, considerando diversas fuentes de datos y abstracciones de subproblemas (Ni, 2001; Blázquez, 2003; Zhu, 2008). Además, pueden combinar razonamiento, heurı́stica y estadı́stica, de forma cualitativa y cuantitativa; sin embargo, generar los parámetros y reglas y por ende, que sean entendidos por el sistema experto constituye un tema complejo. El problema de estas técnicas, es que requieren la existencia de al menos un experto en el sistema estudiado. Dicho experto debe conocer el funcionamiento del sistema nominal y el que presenta para cada uno de los posibles fallos o situaciones extrañas que puedan presentarse. Este hecho limita las posibilidades de desarrollo para sistemas de reciente implantación (como es el caso objeto de estudio en este trabajo). En ellos se desconoce su comportamiento anómalo, además, las relaciones entre posibles sı́ntomas y causas constituyen hipótesis difı́ciles de validar. Las redes neuronales son modelos matemáticos simplificados de las neuronas del cerebro humano. Consisten generalmente en tres capas de elementos, llamadas neuronas y están altamente interconectadas. Pueden atacar problemas de gran dimensión y aprender de la experiencia. De manera simplificada, cada neurona puede definirse como una suma ponderada de entradas, que son pasadas a través de una función no lineal, denominada función de activación como se muestra en la Figura 2.4. El modelo del sistema se obtiene cambiando la ponderación de las entradas de cada red hasta que el comportamiento de la red sea semejante al del sistema. Una vez obtenido el modelo se puede utilizar como sistema de detección de fallos (Alcorta, 2001; Ni, 2001; Sorsa, 1991).. Figura 2.4: Representación de una neurona. 11.
(23) Capı́tulo 2: Revisión Bibliográfica El ajuste de los parámetros se denomina aprendizaje de la red. Un set de aprendizaje debe concebirse tanto en lı́nea como fuera de lı́nea. En cualquier caso, el entrenamiento requiere de largos perı́odos de tiempo, lo que constituye un problema para el caso estudiado debido a los costos en que se incurre con largos perı́odos de experimentos. Por su parte, los métodos basados en el modelo obtenido analı́ticamente, recurren a la generación de residuos, es decir, la comparación de las medidas disponibles del sistema con información a priori representada por el modelo matemático del proceso (Acuña, 2008; Alcorta, 2001; Alessandri, 1999). La decisión de si han existido o no fallos se realiza de acuerdo con la información que portan dichos residuos. Un proceso de decisión puede consistir en un simple test de umbral en los valores instantáneos, en la media móvil de los residuos, o pueden utilizarse los métodos de la teorı́a estadı́stica de decisión. La Figura 2.5 muestra el proceso de generación de residuos de un sistema de detección e identificación de fallos.. Figura 2.5: Obtención de residuos en un sistema de detección e identificación de fallos. Los residuos son generados a partir de procesar las entradas y salidas del sistema, quienes nominalmente son cero (se desvı́an del cero de forma caracterı́stica cuando ocurre un fallo particular). Las técnicas empleadas para generarlos difieren de unos métodos a otros: ecuaciones de paridad, observadores y estimación de parámetros, asignación de estructura propia, entre otros (Alcorta, 2001; Zhang, 2008; Alessandri, 1999; Yang, 1999). La cualidad esencial que posee la generación de residuos es su robustez (insensibilidad), respecto a los errores de modelado que son inevitables. Las falsas alarmas o la incorrecta identificación de los fallos debidos al ruido, las perturbaciones, incertidumbres de los parámetros de la planta y dinámicas no modeladas del sistema, han conducido al diseño de generadores de residuos robustos y a la determinación de umbrales apropiados 12.
(24) Capı́tulo 2: Revisión Bibliográfica a cada residuo (Acuña, 2008). Según lo analizado, no cabe duda que los métodos basados en la redundancia analı́tica mejoran la capacidad de tolerancia a fallos sin adicionar componentes de hardware. Especı́ficamente, son ventajosos, aquellos que emplean el modelo dinámico de la planta con pocas variables de estado. Para el caso particular del HRC-AUV, la detección e identificación de fallos empleando la redundancia analı́tica constituye el método apropiado. El modelado de AUVs se realiza de acuerdo al estudio de las leyes fı́sicas que describen su dinámica en el mar, el número de variables de estado es pequeño y existe una metodologı́a para su obtención (Fossen, 1994). Para el vehı́culo del CIDNAV ya se ha obtenido y validado una versión del modelo (Cañizares, 2010), se han ajustado los controladores del vehı́culo y realizado pruebas experimentales con resultados satisfactorios.. 2.4.. Métodos de generación de residuos. Desde el punto de vista práctico, las etapas en el desarrollo de un sistema de detección e identificación de fallos se pueden agrupar en dos perı́odos: el primero de ellos incluye todas aquellas tareas que se realizan de alguna forma off-line, es decir, fundamentalmente en el laboratorio y constituyen el diseño del sistema en cuestión, el segundo perı́odo incluye las tareas on-line, o sea, las que debe realizar el sistema de detección e identificación durante un funcionamiento real. Entre las etapas del primer perı́odo se destacan el conocimiento parcial del sistema real, lo cual es decisivo para alcanzar elevadas prestaciones en el sistema de detección e identificación (la información disponible sobre las caracterı́sticas de las perturbaciones a las que está sometido el sistema facilita algunas etapas). También cabe mencionar las aproximaciones de la estructura del modelo, el diseño preliminar del sistema de detección e identificación, la recogida de datos, la identificación y validación del modelo, la selección de criterios y parámetros del sistema de detección e identificación, entre otros. En este último, la declaración de los residuos como óptimos para la detección de fallos es escogida a partir de la validación del modelo en ausencia de fallos. Para el HRC-AUV, el modelo ha sido validado mediante simulaciones y de forma experimental 13.
(25) Capı́tulo 2: Revisión Bibliográfica (Zamora, 2011). Los datos obtenidos a través de prácticas experimentales posibilitan determinar el vector de residuos con el fin de detectar fallos. Las tareas on-line que realiza el sistema de detección e identificación luego de culminado el perı́odo de diseño son: la obtención de residuos a partir de los datos reales y la aplicación de las ecuaciones obtenidas del modelo matemático, el filtrado de los residuos con el propósito de eliminar falsas alarmas y la generación del vector de residuos declarado significativo. Por último, las consideraciones sobre los riesgos de error y sus costes, ası́ como informaciones proporcionadas por otros sistemas, son las que se deben tener en cuenta para la toma de una decisión final. La manera en que son generados los residuos es lo que caracteriza los distintos métodos a aplicar. Generalmente, la obtención de residuos utiliza tres clases de modelos: los deterministas y estocásticos, quienes tienen en cuenta un modelo determinado del ruido presente en el sistema y un tercero basado en la estimación de parámetros de un modelo lineal (Blázquez, 2003). La estimación paramétrica radica en suponer que cambios en los parámetros fı́sicos del proceso se ven reflejados en cambios en los parámetros del modelo; por consiguiente, examinando dichos parámetros se puede conocer si han ocurrido fallos o no (Alcorta, 2001). Se nota en este caso que la localización puede llevarse a cabo de manera directa. Más información sobre este procedimiento puede ser encontrada en (Isermann, 1984). Una de las dificultades más grandes es el requerimiento de riqueza en frecuencias de la señal de entrada al sistema, para poder permitir la estimación de los parámetros, este es un requisito que frecuentemente hace este procedimiento no operable. Los métodos que usan modelos estocásticos del sistema, se basan en el estudio estadı́stico de las innovaciones (residuos) de los filtros de Kalman u otros filtros, ejecutando un test de hipótesis. En operación normal las innovaciones de un filtro de Kalman son ruidos blancos de media nula y matriz de covarianza conocida (Isermann, 1993). Entre los tests de hipótesis se pueden mencionar los simples (test de la covarianza y test de la media), el test de razón de probabilidad secuencial (SPRT, Sequential Probability Ratio Test), cuya función está determinada en chequear la propiedad de media cero de las innovaciones a partir de dos modos de operación: un modo de operación normal y otro con fallos. También cabe mencionar el test de razón de verosimilitudes 14.
(26) Capı́tulo 2: Revisión Bibliográfica generalizado (GLR, Generalized Likelihood Ratio Test) y el algoritmo de modelo múltiple. Este último se define como un banco de filtros de Kalman basados en diferentes hipótesis: no fallo y distintos fallos. A partir de ellas se calculan las innovaciones de los distintos filtros y la probabilidad condicional de cada hipótesis (Narendra, 1995). Los métodos que usan modelos deterministas del sistema están basados en el espacio de paridad y los observadores de estado (Acuña, 2008): El espacio de paridad consiste en formar ecuaciones a partir del modelo del proceso, las cuales tienen que cumplirse si el funcionamiento nominal del sistema no se ve alterado por fallos (Alcorta, 2001). Existen tres versiones del espacio de paridad, aunque dos de ellas gozan de mayor popularidad: la primera se fundamenta en una representación interna del sistema, lo que se conoce como variables de estado y la segunda, conocida como ecuaciones de paridad, ostenta como idea principal el chequeo de la consistencia de las ecuaciones matemáticas del sistema. Esta relación de paridad está basada en la redundancia directa o temporal (Chow, 1984; Gertler, 1991). La redundancia directa explota la relación entre las salidas instantáneas de los sensores, mientras la redundancia temporal explota la relación histórica entre las salidas de los sensores y las entradas de los actuadores. Los observadores de estado constituyen herramientas virtuales que permiten estimar las variables o estados de un sistema dinámico determinado a partir de su modelo en espacio-estado. La reconstrucción o estimación de los estados es realizada a través de mediciones de las señales de salida y de control de dicho sistema. Los observadores envı́an información estimada acerca del valor que toman dichos estados, permitiendo conocer un aproximado del valor real, además, cuentan con muy poco margen de diferencia o error. El error en la estimación puede usarse como residuo para la detección de fallos (Hallouzi, 2008). La selección del observador depende de las caracterı́sticas del objeto de estudio, es decir, el tipo de fallos que se desee detectar (ya sea en componentes, actuadores o sensores), los criterios que se quieran alcanzar (robustez, identificabilidad, entre otros) y la estructura del sistema en cuestión (controlabilidad y observabilidad). Como consecuencia de esto se pueden elegir entre observadores lineales o no lineales, completos o de orden reducido, fijos o adaptativos. Si bien los primeros trabajos en esta lı́nea utilizaban 15.
(27) Capı́tulo 2: Revisión Bibliográfica un único observador, denominado observador dedicado, en la actualidad se ha extendido el uso de bancos de observadores, también nombrados esquemas de observadores. Estos métodos de generación de residuos persiguen fundamentalmente mejorar su robustez frente a errores de modelado y perturbaciones. Agrupando ambas incertidumbres, bajo el término genérico de entradas desconocidas, se han desarrollado varios métodos que buscan la insensibilidad frente a dichas entradas desconocidas. En la Figura 2.6 se muestra un resumen de las principales técnicas de generación de residuos (Zhang, 2008; Chen, 1995).. Figura 2.6: Principales técnicas de generación de residuos. Según lo visto, en el diseño del sistema de detección de fallos para el vehı́culo desarrollado por el CIDNAV, es conveniente utilizar observadores de estado como herramienta 16.
(28) Capı́tulo 2: Revisión Bibliográfica para la obtención de residuos. Este método es de fácil implementación y proporciona elevada fiabilidad. El modelo del vehı́culo es linealizable y se cuenta con las herramientas para acometer su realización.. 2.5.. Arquitectura general del sistema.. El HRC-AUV es un vehı́culo cilı́ndrico con una estructura similar a HUGIN 4500 (Hegrenaes, 2009) o STARFISH (Sangekar, 2008). El sistema de propulsión está compuesto por una hélice y dos timones, todos manejados eléctricamente. El diseño del móvil le permite operar a profundidades de hasta 10 m. La arquitectura de hardware y el esquema sensorial necesario fue diseñado por el GARP. En la Figura 2.7 se muestra esquemáticamente los componentes de hardware que forman el sistema. Esta estructura tiene dos estaciones de cómputo claramente definidas: una estación a bordo del vehı́culo y otra estación remota en tierra o simplemente en la superficie.. Figura 2.7: Arquitectura de hardware del HRC-AUV. Estación en superficie o tierra firme: está equipada con una laptop donde se ejecuta el sistema remoto de supervisión y configuración del autopiloto. La laptop 17.
(29) Capı́tulo 2: Revisión Bibliográfica está conectada a un radio enlace que se utiliza para el intercambio de datos durante las misiones (siempre que el vehı́culo esté en la superficie), y un dispositivo de red inalámbrica o punto de acceso que permite cierta redundancia en la comunicación. Estación a bordo: el vehı́culo está equipado con un radio enlace y un punto de acceso para comunicación con la laptop en la superficie. Posee también una computadora industrial tipo (PC-104 ) encargada de la adquisición de las mediciones digitales del sensor inercial y el de posición, del manejo de la comunicación y además de la ejecución del software de navegación y control. La estación también consta de un hardware empotrado basado en Michoship DsPIC 30F4013 que actúa como colector y procesador primario de las señales analógicas, ası́ como de interruptor entre el estado manual y el automático; se conecta a la PC-104 mediante comunicación serie. Las prestaciones del hardware que actualmente compone la estación a bordo, garantizan la ejecución del sistema de detección e identificación de fallos basado en la redundancia analı́tica.. 2.5.1.. Sensores. La selección del esquema sensorial obedece a un estudio previo de diferentes variantes reportadas en la literatura. Cada una de las alternativas analizadas están diseñadas de acuerdo a las aplicaciones para las que fue concebido el AUV, sin embargo existe general correspondencia en el esquema sensorial básico: Unidad de Movimiento Inercial (IMU, Inertial Movement Unit): MTi de la firma Xsens. Este pequeño sensor contiene arreglos 3D de acelerómetros, giróscopos y magnetómetros con el propósito de determinar con precisión la actitud del vehı́culo en tiempo real. Sistema de Posicionamiento Global (GPS, Global Positioning System): XL12 de la firma Garmin. Brinda información precisa del estado del vehı́culo dada en latitud, longitud y altura (se emplea solamente en la navegación en superficie). Sensor de profundidad: Cerabar T PMP 131 de la firma Endress+Hauser, sensor analógico utilizado para determinar la profundidad de operación del AUV. 18.
(30) Capı́tulo 2: Revisión Bibliográfica Ángulo de los timones: MLO-POT-225-TLF de la firma Festo, sensor analógico. Este sensor mide la posición real de los timones. Sensor de nivel de baterı́as: sensor analógico. Este sensor realiza una estimación del estado de las baterı́as, basado en los niveles de voltaje y corriente entregados al sistema de propulsión. Revoluciones del propulsor: sensor digital. Provee las revoluciones (rpm) del motor propulsor. Evidentemente, el sistema sensorial es de bajo costo comparado con otros desarrollos de AUV, lo que ocasiona un ahorro considerable por concepto de adquisición de sensores, pero por otra parte los sensores propuestos no poseen la precisión óptima requerida en estas aplicaciones. Para aminorar los efectos que esto produce, se hace necesario contar con un modelo matemático preciso y algoritmos complejos. Los sensores propensos a fallos fundamentalmente son el GPS y la IMU. El primero tiene como caracterı́stica que cuando el vehı́culo se sumerge la señal se pierde, evidenciándose un fallo abrupto como resultado. Por otra parte en la IMU, especı́ficamente el sensor de rumbo, está contenido en un ambiente ferromagnético, lo que puede incluir desviaciones en las mediciones. Los demás son simples y de mayor robustez.. 2.6.. Conclusiones generales del capı́tulo. En este capı́tulo se realizó un análisis de la literatura referente a los sistemas tolerantes a fallos y los principales mecanismos de implementación (especı́ficamente para los AUVs). Después de concluir el estudio se arribaron a las conclusiones siguientes: 1. La tolerancia a fallos constituye una cualidad indispensable para los sistemas de control automáticos, ya que permite un funcionamiento fiable, seguro y evita comportamientos inadecuados. 2. La tolerancia a fallos, especı́ficamente para los AUVs, está ampliamente referenciada en la literatura. Los métodos de implementación están basados en la redundancia paralela o analı́tica. 19.
(31) Capı́tulo 2: Revisión Bibliográfica 3. En el sistema tolerante a fallos del HRC-AUV, la redundancia analı́tica es la mejor opción. A pesar de elevar la complejidad de cómputo, esta alternativa evita los costos adicionales por concepto de adquisición de sensores redundantes. 4. El método idóneo a aplicar en el sistema tolerante a fallos es aquel que emplea el modelo de la planta. El modelo del vehı́culo (HRC-AUV ) está disponible.. 20.
(32) Capı́tulo 3 Modelado del vehı́culo autónomo subacuático del CIDNAV 3.1.. Introducción. El primer paso hacia el control tolerante a fallos en AUVs implica el modelado y control. Especı́ficamente obtener el modelo matemático en vehı́culos de este tipo resulta relevante par la sı́ntesis de estrategias de control. Varios de los resultados y el cumplimiento satisfactorio de las misiones dependen de la precisión y exactitud del mismo (Cañizares, 2010). En este capı́tulo se expone un resumen del modelo del HRCAUV presentado en los trabajos de diploma de J. R. Cañizares (Cañizares, 2010) y H. Zamora (Zamora, 2011). Como herramienta para el cálculo y la simulación se utiliza el MATLAB. El capı́tulo está organizado de la siguiente forma: Caracterı́sticas generales en el modelado de AUVs. Modelo de 6 GDL del HRC-AUV. Cálculo de los parámetros del modelo de 6 GDL. Modelado de las perturbaciones marinas. Validación del modelo de 6 GDL considerando el efecto del oleaje y las corrientes marinas. Obtención del modelo linealizado. 21.
(33) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV Validación del modelo linealizado.. 3.2.. Generalidades en el modelado de AUVs. El modelado de AUVs se encuentra ampliamente referenciado en la literatura. La obtención de parámetros estáticos y dinámicos en vehı́culos de este tipo incluye una metodologı́a (Fossen, 2006). En las investigaciones precedentes se obtuvo el modelo del HRC-AUV a partir de la geometrı́a del submarino y pruebas experimentales para hallar los coeficientes que describen su dinámica en determinadas condiciones operacionales.. 3.2.1.. Fuerzas que actúan en un AUV. El origen de las fuerzas que actúan en el submarino determina la forma de obtención de los parámetros del modelo matemático. Fuerzas hidrodinámicas Masas añadidas debido a la inercia del ruido que envuelve al móvil. El amortiguamiento potencial de radiación inducida provocado por la energı́a transferida de las olas generadas en la superficie. Fuerzas hidrostáticas Las fuerzas de restablecimiento descritas por Arquı́mides (peso y flotabilidad). Fuerzas ambientales Efecto del oleaje Corrientes oceánicas Fuerzas de propulsión y torques debido a los motores y superficies de control (actuadores) 22.
(34) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV Hélices Timones Estabilizadores. 3.2.2.. Sistema de coordenadas y notación utilizada. Dinámicamente un AUV se puede considerar como un sólido rı́gido con seis grados de libertad (6 GDL): tres coordenadas para los movimientos de traslación y otras tres para los movimientos de rotación, presentando relaciones dinámicas altamente no lineales y acopladas (Cañizares, 2010). El movimiento de un submarino se describe respecto a un sistema de referencia inercial (Cañizares, 2010). Normalmente se supone que la aceleración respecto a tierra de un punto en la superficie puede ser despreciada por vehı́culos marinos. Esta aproximación es válida a partir de que la rotación de la Tierra afecta muy poco a los vehı́culos marinos de baja velocidad. De esta forma puede considerarse que un sistema de referencia situado en tierra (OE) es un sistema inercial cuyos ejes de coordenadas X − Y − Z están direccionados positivamente hacia el Norte, el Este y el centro de la Tierra respectivamente. De aquı́ se infiere que la posición y orientación del vehı́culo deben ser referidas a OE mientras que las velocidades lineales y angulares estarán asociadas a un sistema de coordenadas móvil situado en el vehı́culo (OB). El origen del sistema de coordenadas del submarino se puede elegir coincidiendo con el centro de flotabilidad (CB), aprovechando que usualmente tanto el centro de gravedad (CG) como CB están situados en los planos de simetrı́a del vehı́culo. La Figura 3.1 muestra los sistemas de coordenadas ası́ como los ángulos y las velocidades. En la Tabla 3.1 se resume la nomenclatura estándar utilizada para describir los movimientos, las fuerzas y los momentos de los AUVs (SNAME, 1950). Ası́, el vector velocidad respecto al sistema de coordenadas del submarino queda definido por:. 23.
(35) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. Figura 3.1: Sistema de coordenadas, ángulos y velocidades Tabla 3.1: Notación utilizada para AUVs.. Traslación Fuerza Avance X Desplazamiento lateral Y Arfada Z Rotación Momento Balanceo K Cabeceo M Guiñada N. ν=. ". ν1 ν2. #. con ν1 =. h. Velocidad lineal Posición u x v y w z Velocidad angular Ángulo p φ q θ r ψ. iT. u, v, w. y ν2 =. h. p, q, r. iT. (3.1). y el vector de posición y orientación respecto al sistema de referencia inercial queda determinado por:. η=. ". η1 η2. #. con η1 =. h. x, y, z. iT. y η2 =. h. φ, θ, ψ. iT. (3.2). Los vectores de velocidad, posición y orientación referidos a los dos sistemas de referencia, ecuaciones (3.1) y (3.2), se relacionan a través de las transformaciones de ángulos de Euler, como se demuestra en (Cañizares, 2010).. η̇ = J(η)ν 24. (3.3).
(36) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV donde:. J(η) =. ". J1 (η2 ). 0. 0. J2 (η2 ). #. . cψcθ (cψsθsφ − sψcφ) (sψsφ + cψcφsθ). . J1 (η2 ) = sψcθ (cψcφ + sφsθsψ) (sθsψcφ − cψsφ) −sθ cθsφ cθcφ . 1. tθsφ. J2 (η2 ) = 0. tθcφ. . −sφ 0 sφ/cθ cφ/cθ cφ. tal que: c∗ = cos(∗), s∗ = sen(∗), t∗ = tan(∗), notando que θ 6= π2 .. 3.2.3.. Ecuaciones dinámicas del movimiento. Las ecuaciones que describen el movimiento del vehı́culo en el espacio tridimensional pueden obtenerse a partir de las leyes de conservación de los momentos lineales y angulares referidos a un sistema inercial de referencia. En (Fossen, 1994) se demuestra que la segunda ley de Newton puede expresarse para cualquier vehı́culo subacuático con un sistema de coordenadas fijo al cuerpo, de la forma (Cañizares, 2010):. MRB ν̇ + CRB (ν)ν + MA ν̇ + CA (ν)ν + D(ν)ν + | {z } | {z }. términos del cuerpo r ígido. términos hidrodinámicos. g(η) |{z}. =τ. (3.4). términos hidrostáticos. donde el vector de entradas de control τ ∈ R6×1 es:. τ = [τX , τY , τZ , τK , τM , τN ]T además: MRB ∈ R6×6. matriz de inercia del cuerpo rı́gido. CRB (ν) ∈ R6×6 matriz de fuerzas centrı́peta y de Coriolis del cuerpo rı́gido 25. (3.5).
(37) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV MA ∈ R6×6. matriz de inercia de masas añadidas. CA (ν) ∈ R6×6. matriz de fuerzas centrı́peta y de Coriolis de masas añadidas. D(ν) ∈ R6×6. matriz de amortiguamiento. g(η) ∈ R6×1. vector de momentos gravitacionales y de flotabilidad. La ecuación (3.4) se puede representar de forma compacta como:. Mν̇ + C(ν)ν + D(ν)ν + g(η) = τ. (3.6). Mν̇ = MRB ν̇ + MA ν̇. (3.7). C(ν)ν = CRB (ν)ν + CA (ν)ν. (3.8). notando que:. y. 3.3.. Modelo de 6 GDL del HRC-AUV. Términos de cuerpo rı́gido Para determinar las matrices correspondientes a los términos del cuerpo rı́gido se refiere la posición del centro de masa (CG) respecto al origen OB en el cuerpo. Cabe destacar que el CG generalmente coincide con el centro de flotabilidad CB. La distancia que existe entre CG y CB se define como BG = [BGx , BGy , BGz ]T . Como el HRCAUV presenta buena simetrı́a en los planos x − y, y − z y x − z, el vector BG queda definido como BG = [0, 0, BGz ]T . Las matrices MRB y CRB (ν) se pueden obtener aproximadamente como sigue: . MRB. m. 0. 0. 0. 0 m 0 −mzG 0 0 m 0 = −mzG 0 Ixx 0 mz 0 0 0 G 0 0 0 −Ixz 26. mzG. 0. 0. 0. 0. 0. 0. −Ixz. Iyy. 0. 0. Izz. . (3.9).
(38) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. . 0. 0. 0. mzG r. mw. −mv. 0 0 0 −mw mzG r mu 0 0 0 mv − mzG p −mu − mzG q 0 CRB (ν) = mw −mv + mzG p 0 −Ixz p + Izz r −Iyy q −mzG r −mw −mz r mu + mz q I p − I r 0 Ixx p − Ixz r G G xz zz mv −mu 0 Iyy q −Ixx p + Ixz r 0 (3.10) donde m es la masa del vehı́culo, la cual se asume uniformemente distribuida y los parámetros Iij pertenecen a la matriz de inercia referida a OB. . Ixx. I= −Iyx. −Ixy −Ixz Iyy. −Izx −Izy. . . Ixx. 0. −Ixz. −Iyz Iyy = 0 Izz −Ixz 0. 0 Izz. . Términos hidrodinámicos Para vehı́culos sumergidos, las fuerzas y momentos hidrodinámicos son producidos por la presión que ejerce el fluido circundante al vehı́culo, creando un efecto al que se le suele llamar “masas añadidas” y por el amortiguamiento viscoso (Antonelli, 2006). El método a emplear para determinar estos términos se puede encontrar en (Fossen, 1994), donde se propone el cálculo de las masas añadidas para un elipsoide alargado con distribución uniforme de masa me y volumen Ve . A partir de la geometrı́a del HRC-AUV se encuentra el elipsoide alargado equivalente (un procedimiento similar se realiza en (Estrela˜da Silva, 2007)). Las matrices MA y CA (ν) tienen las expresiones siguientes :. MA = −diag{Xu̇ , Yv̇ , Zẇ , Kṗ , Mq̇ , Nṙ } y. 27. (3.11). .
(39) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. . 0. 0. 0. 0. 0 0 0 Zẇ w 0 0 0 −Yv̇ v CA (ν) = −Zẇ w Yv̇ v 0 0 Z w 0 −Xu̇ u Nṙ r ẇ −Yv̇ v Xu̇ u 0 −Mq̇ q. −Zẇ w 0 Xu̇ u −Nṙ r 0 Kṗ p. Yv̇ v. . −Xu̇ u 0 Mq̇ q −Kṗ p 0. (3.12). Determinar los términos de la matriz de amortiguamiento (D(ν)) constituye el cálculo de mayor complejidad en el modelado de AUVs. En aquellos vehı́culos subacuáticos donde la velocidad con que se mueven es alta, el amortiguamiento será altamente no lineal y acoplado. Para el caso objeto de estudio, el movimiento normalmente ocurre a velocidades medias o bajas y dada la simetrı́a en los tres planos del móvil, se obtiene una estructura diagonal solamente con términos de amortiguamiento lineales y cuadráticos (Cañizares, 2010).. DL (ν) = −diag{Xu , Yv , Zw , Kp , Mq , Nr }. DC (ν) = −diag{Xu|u| |u|, Yv|v| |v|, Zw|w||w|, Kp|p| |p|, Mq|q| |q|, Nr|r| |r|} notando que:. D(ν) = DL (ν) + DC (ν). (3.13). Una buena aproximación es asumir en la matriz de términos cuadráticos (DC (ν)) solo el efecto producido por Xu|u| |u|. Esto es válido porque la principal componente de movimiento aparece en el eje X (Avance), resultando pequeñas las restantes velocidades lineales y angulares (Cañizares, 2010). de esta forma la matriz D(ν) queda como:. D(ν) = −diag{Xu + Xu|u| |u|, Yv , Zw , Kp , Mq , Nr } 28.
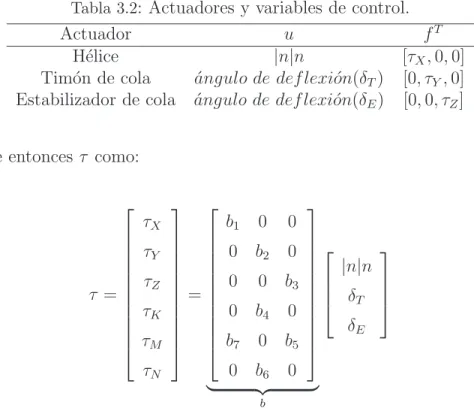
(40) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV Términos hidrostáticos Las fuerzas hidrostáticas se deben a la relación peso-flotabilidad y se manifiestan en todo sólido que se encuentre en un medio lı́quido (Antonelli, 2006). Especı́ficamente, el (HRC-AUV ), se diseñó con flotabilidad nula, ello implica que el peso y la flotabilidad son de igual magnitud (W = B). Además, considerando BG = [0, 0, BGz]T la distancia entre CG y CB, como se expresó anteriormente, el vector de momentos gravitacionales y de flotabilidad queda determinado como:. g(η) =. h. 0 0 0 W BGz cθsφ W BGz sθ 0. iT. (3.14). Modelo de los actuadores. El vector de entradas de control (τ ) se obtiene a partir de las fuerzas de control provocadas por las hélices, timones o estabilizadores según se demuestra en (Cañizares, 2010). En la Tabla 3.2 se muestran los actuadores y variables de control para el vehı́culo del CIDNAV. Tabla 3.2: Actuadores y variables de control.. Actuador Hélice Timón de cola Estabilizador de cola. u |n|n ángulo de def lexión(δT ) ángulo de def lexión(δE ). fT [τX , 0, 0] [0, τY , 0] [0, 0, τZ ]. Se define entonces τ como: . τ = . τX. . . τY τZ = τK τM τN |. b1. 0. 0. . 0 |n|n 0 0 b3 δT 0 b4 0 δE b7 0 b5 0 b6 0 {z } 0 b2. b. donde b constituye la matriz de ganancias del vector de entradas de control. 29. (3.15).
(41) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV Con lo expuesto anteriormente, se tienen todas las matrices que intervienen en la ecuación (3.4). Evidentemente solo queda determinar los parámetros estáticos y dinámicos que forman cada una de estas matrices para obtener el modelo de 6 GDL del HRCAUV.. 3.4.. Cálculo de los parámetros del modelo de 6 GDL. Los parámetros geométricos e inerciales del vehı́culo se presentan en el Anexo A, para determinar los momentos de inercia se modeló el móvil en 3D utilizando el software “Mechanical Desktop”. El cálculo de las masas añadidas se hizo a partir de la aproximación a un esferoide alargado. De esta forma la matriz M según la ecuaciones (3.7) y (3.11), queda como: . 4345,4. 0. 0. 7929. M= . 0 0 91 0. 0. 0. 91. 0. . 0 7929 0 0 0 −91 0 450,1 0 −275 0 0 0 36582 0 0 0 −275 0 36388 0. −91. 0. 0. (3.16). mientras que la matriz C(ν) se puede obtener con las ecuaciones (3.8), (3.10) y (3.12), quedando:. . 0. 0. 0. 91r. 7929w. −7929v. 0 0 0 −7929w 91r 4535,4u 0 0 0 7929v − 91p −4535,4u − 91q 0 C(ν) = 7929w −7929v + 91p 0 −275p + 36388r −36582q −91r −7929w −91r 4535,4u + 91q 275p − 36388r 0 450,1p − 275r 7929v −4535,4u 0 36582q −450,1p + 275r 0 (3.17) Por último la matriz g(η) se determina con la ecuación (3.14). 30. .
(42) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. g(η) =. 3.4.1.. h. 0 0 0 890,5cθsφ 890,5sθ 0. iT. (3.18). Identificación de parámetros dinámicos. Los coeficientes de la matriz de amortiguamiento D(ν) y las ganancias del vector de entradas de control τ fueron obtenidas mediante identificación experimental. Para ello se realizaron tres experimentos, en (Cañizares, 2010) fueron demostrados cada uno de ellos . Como resultado se obtuvo:. D(ν) = −diag{ −181,45 − 47,49u −1219,8 −1219,8 −126,62 −9096,9 −9096,9 } (3.19) y. . τ = . 3.5.. b1. 0. 0. . . 0,1946. 0. 0. . 0 0 318,39 0 |n|n |n|n 0 0 −24,1 0 0 b3 δT δT = 0 b4 0 0 −7,004 0 δE δE 0,0052 0 96,32 b7 0 b5 0 1273,56 0 0 b6 0 0 b2. . (3.20). Modelado de las perturbaciones marinas. Las principales perturbaciones que afectan a los submarinos durante la navegación constituyen el oleaje generado por el viento y las corrientes marinas. Ambas pueden influir alterando la velocidad, la posición y la orientación del móvil, también contribuyen a la realización de acciones de control excesivas por parte del sistema de control del vehı́culo y provocan bajo desempeño del sistema de navegación. Incluir sus efectos en el modelo del HRC-AUV establece una mayor exactitud del mismo, incluso incrementa la robustez del sistema de control. 31.
(43) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV Para modelar el oleaje y las corrientes marinas se procede a reescribir la ecuación 3.6 en función del efecto provocado por ambas perturbaciones como:. Mν˙r + C(νr )νr + D(νr )νr + g(η) = τolas + τ. (3.21). donde τolas representa las fuerzas y momentos provocados por el oleaje y νr el término que incluye la velocidad relativa de las corrientes. El método seleccionado para modelar el efecto producido por el oleaje y las corrientes marinas está expresado en el trabajo de diploma de H. Zamora (Zamora, 2011). En esta investigación solo se expondrá un resumen de la metodologı́a.. 3.5.1.. Modelado del oleaje. El oleaje generado por el viento tiene como caracterı́stica que afecta el avance, el desplazamiento lateral y el ángulo de guiñada del vehı́culo. Se representa como una suma de componentes de onda, sin embargo en el estudio de los vehı́culos subacuáticos se considera suficiente los términos de primer y segundo orden (Fossen, 1994). El término de primer orden se conoce como efecto oscilatorio de primer orden, por su parte, el de segundo orden se denomina efecto de deriva (Zamora, 2011). Para representar el oleaje según (Zamora, 2011) se aproxima el espectro de frecuencias que este crea a un espectro de probabilidad denominado espectro de JONSWAP. Posteriormente se aproxima linealmente el espectro de forma que pueda ser incluido en los lazos de control, para ello se obtiene una función de transferencia de segundo orden simple, siendo y(s) la salida del modelo de las olas.. y(s) = h(s)w(s). (3.22). donde w(s) es un ruido blanco gaussiano de valor medio igual a cero, con espectro de potencia Pww (w) = 1, 0. La función de transferencia que debe ser hallada es h(s):. 32.
(44) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. h(s) =. s2. Kw s + 2ζw0 s + w02. (3.23). donde se define Kw = 2ζw0σw , σw es una constante que describe la intensidad de las olas, ζ es el coeficiente de amortiguamiento y w0 es la frecuencia fundamental de las olas. En (Zamora, 2011) se simuló el efecto del oleaje implementando la aproximación lineal.. 3.5.2.. Modelado de las corrientes. Las corrientes marinas tienen como distintivo que arrastran el vehı́culo fuera de su curso. Para incluir su efecto en el modelo del HRC-AUV se debe representar este en términos del vector de velocidad relativa (νr ) que incluye la velocidad de las corrientes, tal como se muestra en la ecuación 3.21 (Zamora, 2011):. νr = ν − νc. (3.24). siendo ν el vector velocidad lineal del vehı́culo y νc = [uc, vc, wc, 0, 0, 0]T es el vector velocidad de las corrientes referido a OB, considerando que las mismas no generan movimientos de rotación en el móvil. Las componentes de velocidad fijadas en tierra (uE , vE , wE ) se relacionan con la velocidad de las corrientes Vc a través de dos ángulos: el ángulo de ataque αc y el ángulo de desplazamiento lateral βc , describiendo la orientación en los ejes Y y Z respectivamente (Fossen, 1994). Generalmente para los AUVs se realiza un análisis tridimensional de las corrientes, sin embargo, en (Zamora, 2011) es suficiente un análisis bidimensional (2D), teniendo en cuenta únicamente el movimiento en un plano horizontal paralelo al plano x − y y por tanto, las componentes se describen solamente en función de Vc y βc considerando αc = 0. Posterior a una serie de aproximaciones y cálculos como se demuestra en (Zamora, 2011) se obtienen las ecuaciones de las velocidades de las corrientes referidas a OB. 33.
(45) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. 3.6.. uc = Vc cos(αc ) cos(βc ). (3.25). vc = Vc sin(βc ). (3.26). Validación del modelo de 6 GDL considerando el efecto del oleaje y las corrientes marinas. En (Zamora, 2011) quedó validado el modelo de 6 GDL considerando el efecto que producen las corrientes y el oleaje. Para ello se simuló el modelo intentando reproducir un experimento en el mar. Los datos de la corrientes marinas se estimaron a partir de las tramas obtenidas por el GPS instalado en el AUV. La velocidad de las corrientes se determinó en Vc = 0,21 m/s, con un ángulo βc = −136 grados y el ángulo inicial de guiñada del móvil se estimó en −1,35 rad. También se conoce que el motor funcionó a 490 rpm y el ángulo de deflexión aplicado fue de −0,52 rad. Los datos del oleaje fueron: w0 = 6,0 rad/seg, σw = 0,5 m mientras los valores de las ganancias ajustables para la intensidad de las olas K y K1 se mantienen en 0,5 y 2 respectivamente. Según estas caracterı́sticas el vehı́culo debe seguir una trayectoria circular en el plano x − y, pero desplazada por el efecto de las corrientes marinas. La Figura 3.2 muestra en azul la trayectoria seguida por el GPS mientras en rojo la curva obtenida por el modelo de 6 GDL. Claramente se observa que el comportamiento de ambas curvas es similar, las desviaciones en los datos reales con relación a los simulados son pequeñas. De esta forma se cuenta con un modelo de 6 GDL para el vehı́culo del CIDNAV, el cual representa con buena exactitud las caracterı́sticas dinámicas de este. Como se ha mencionado previamente, la generación de residuos en el sistema de detección de fallos del HRC-AUV será efectuada mediante observadores de estado. Para los fines de diseño de observadores se hace necesario contar con una versión linealizada en espacio-estado del modelo del móvil. Esto conlleva a realizar un análisis de las no linealidades presentes en el modelo con el fin de eliminarlas o atenuar sus efectos con 34.
(46) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. 10 Datos reales Modelo 6GDL. 0 −10. Posición Y (m). −20 −30 −40 −50 −60 −70 −80 −40. −30. −20. −10 0 Posición X (m). 10. 20. 30. Figura 3.2: Simulación del modelo y la trayectoria obtenida con el GPS. aproximaciones lineales.. 3.7.. Obtención del modelo linealizado. Para obtener una versión linealizada del modelo dinámico del HRC-AUV se parte del análisis de la ecuación 3.6 (forma compacta de la ecuación 3.4). Realizando pequeños ajustes se puede llegar a una expresión próxima a la comúnmente utilizada para expresar modelos en espacio-estado de la forma:. ẋ = Ax + Bu y = Cx + Du En un primer reordenamiento de términos la ecuación 3.6 se puede expresar como:. ν̇ = −M−1 (C(ν) + D(ν))ν − M−1 g(η) + M−1 τ sustituyendo τ por su expresión matricial se obtiene: 35. (3.27).
(47) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV. −1 ν̇ = −M−1 (C(ν) + D(ν))ν − M−1 g(η) + M | {z }b u. (3.28). B. donde:. b: matriz de ganancias del vector de entradas de control u: entradas de control ası́ aparece la matriz B en la forma espacio-estado: B = M−1 bu. Para llegar a una ecuación de la cual se pueda obtener la matriz A en la forma espacio-estado se hace necesario expresar g(η) como un producto del vector de estado. Esto permite adicionarla a las matrices C(ν) y D(ν). Otro problema a resolver es el hecho de que el vector g(η) incluye términos no lineales (cos(θ), sin(φ) y sin(θ)). En el caso del HRC-AUV, los ángulos φ y θ que experimenta son realmente pequeños, lo que implica eliminar las no linealidades presentes en el vector de términos hidrostáticos (g(η)) asumiendo que la función coseno para ángulos pequeños es aproximadamente 1 y la función seno es el propio ángulo. Ası́ el vector g queda como:. g(η) =. h. 0 0 0 890,5φ 890,5θ 0. iT. (3.29). Teniendo el vector en esta representación se resuelve el problema de las no linealidades pero aparecen las variables φ y θ que no están presentes en el vector de estado ν, aunque si dependen de este. Se procede entonces a incluir dos ecuaciones más al sistema, lo cual constituye en sı́ una linealización de la ecuación 3.3 ante ángulos φ y θ pequeños:. φ̇ = p. (3.30). θ̇ = q. (3.31). donde p y q son variables del vector de estado ν. Es posible expresar entonces el vector de términos hidrostáticos g(η) como una matriz g que multiplica al vector de estados de la forma: ζ = [ν, φ, θ]T = [u, v, w, p, q, r, φ, θ]T 36.
(48) Capı́tulo 3: Modelado del vehı́culo autónomo subacuático del CIDNAV tal que: . g≈ . 0 0 0 0 0 0. 0 0 0 0 0 0 0 0 0 0. 0. . 0 0 0 0 0 0 0 0 0 0 890,5 0 0 0 0 0 0 890,5 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0. 0 0 0 0 0 0 0 0. 0 0. 0. (3.32). Reescribiendo la ecuación 3.28 en función del nuevo vector de estados ζ se tiene:. −1 ζ̇ = −M−1 (C(ν) + D(ν) + g) ζ + M | {z }b u {z } |. (3.33). B. A. donde ya aparece la matriz A en la forma espacio-estado: A = −M−1 (C(ν) + D(ν) + g). la segunda ecuación del modelo en espacio-estado se escribe como:. y = Cζ donde y es la salida del modelo y C es una matriz identidad (C = I8x8 ). Con lo expuesto anteriormente, se ha expresado el modelo en espacio-estado, sin embargo se observa que en la matriz A los elementos D(ν) y C(ν) presentan no linealidades. El primero, según la ecuación 3.19 depende dinámicamente de la componente u del vector de estado. Una buena aproximación consiste en sustituir la componente u por la velocidad nominal del vehı́culo (u0 ). Como resultado se obtiene una matriz D con todos sus términos lineales:. 37.
Figure


+7





Documento similar
En el capítulo de desventajas o posibles inconvenientes que ofrece la forma del Organismo autónomo figura la rigidez de su régimen jurídico, absorbentemente de Derecho público por
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Esto viene a corroborar el hecho de que perviva aún hoy en el leonés occidental este diptongo, apesardel gran empuje sufrido porparte de /ue/ que empezó a desplazar a /uo/ a
La primera opción como algoritmo de compresión para secuencias biológicas que sugirió la directora del proyecto fue la adaptación de los algoritmos de Lempel-Ziv al alfabeto formado
En esta sección se tratan las características que debe tener un compresor de secuencias biológicas para poder ser usado como herramienta en la construcción de los árboles de
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
