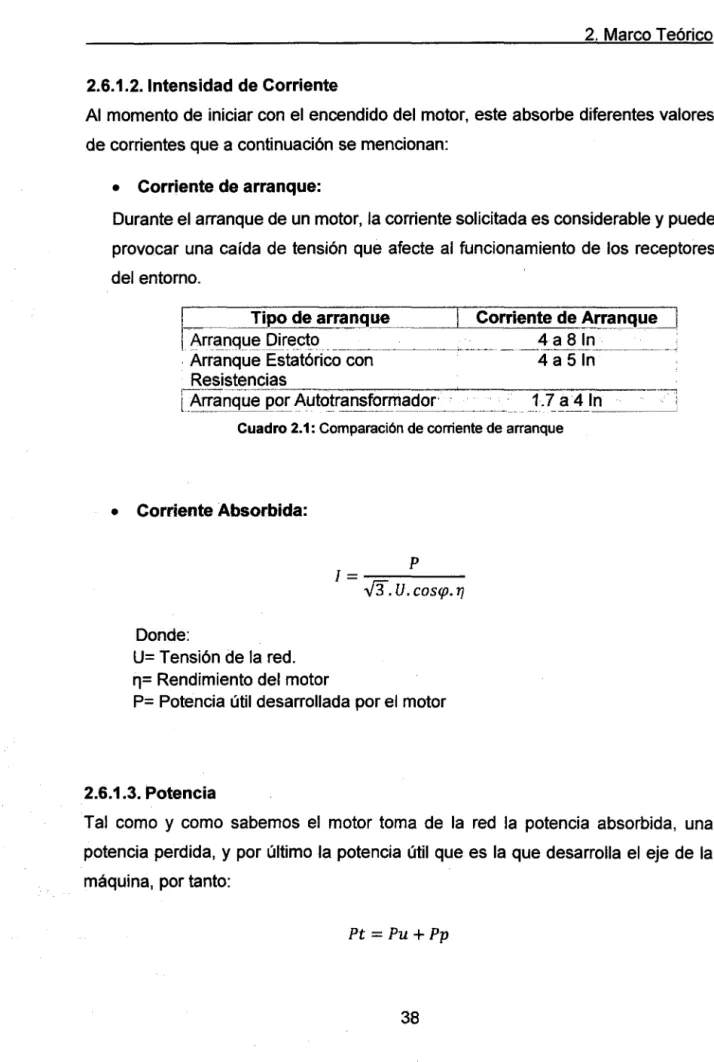
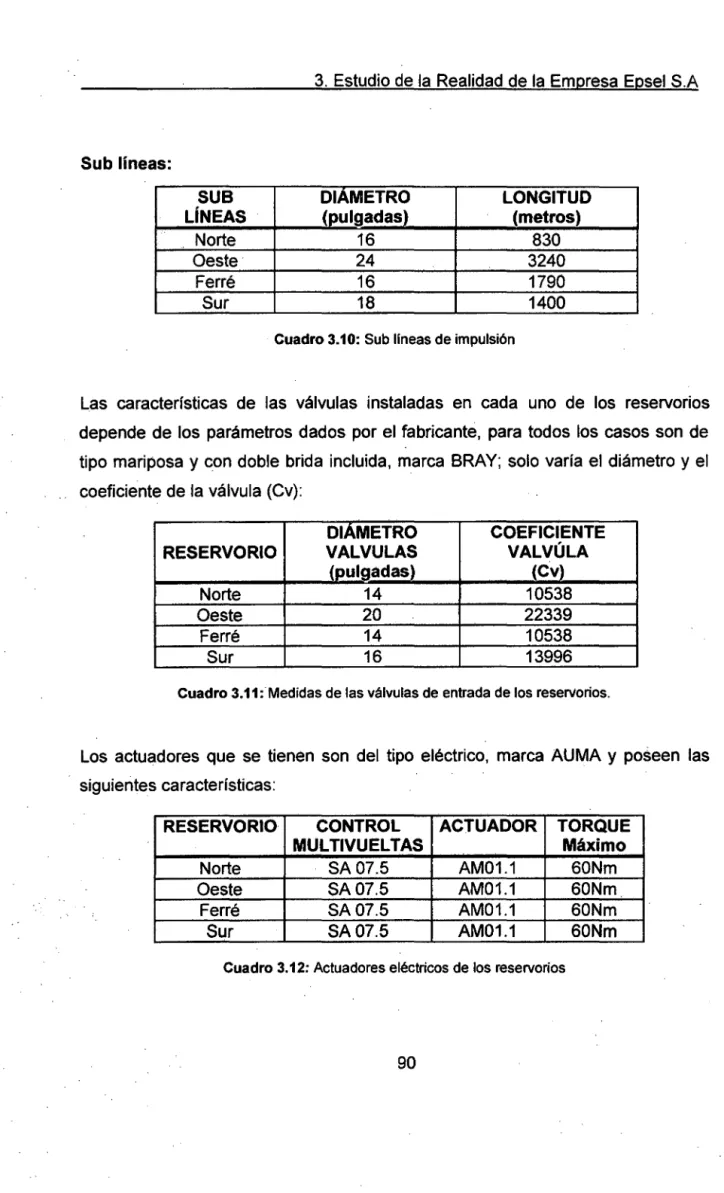
Diseño de un sistema remoto para el monitoreo y control de reservorios en el distrito de Chiclayo
357
0
0
Texto completo
(2) UNIVERSIDAD NACIONAL PEDRO RUIZ GALLO FACULTAD DE CIENCIAS FiSICAS Y MATEMATICAS ESCUELA PROFESIONAL DE INGENIERiA ELECTRÓNICA. "DISEÑO DE UN SISTEMA REMOTO PARA EL MONITOREO Y CONTROL DE RESERVORIOS EN EL DISTRITO DE CHICLAYO.". TESIS PARA OPTAR POR EL TiTULO PROFESIONAL DE. INGENIERO ELECTRÓNICO. PRESENTADA POR:. Bach. MIGUEL CUSTODIO CORBERA. LAMBAYEQUE- PERÚ. 2014.
(3) UNIVERSIDAD NACIONAL PEDRO RUIZ GALLO Facultad de Ciencias Físicas y Matemáticas Escuela Profesional de Ingeniería Electrónica. "DISEÑO DE UN SISTEMA REMOTO PARA EL MONITOREO Y CONTROL DE RESERVORIOS EN EL DISTRITO DE CHICLAYO." TESIS PROFESIONAL PRESENTADA POR BACH. MIGUEL CUSTODIO CORBERA COMO REQUISITO PARA OBTENER EL TiTULO PROFESIONAL DE INGENIERO ELECTRÓNICO JURADO CALIFICADOR lng. Manuel Ramírez Castro PRESIDENTE lng. Hugo Javier Chiclayo Padilla SECRETARIO lng. Carlos Leonardo Oblitas Vera VOCAL Lambaqueye, Perú.. Julio del2014..
(4) Tesis Profesional sustentada por Bach. Miguel Custodio Corbera Como requisito para obtener el título de Ingeniero Electrónico. Verificada y aceptada por la Escuela Profesional de Ingeniería Electrónica.. lng. Manuel Ramírez Castro. lng. Hugo Javier Chiclayo Padilla. Presidente. Secretario. lng. Carlos Leonardo Oblitas Vera. lng. Víctor Olegario Jara Sandoval. Vocal. Asesor. Julio del 2014.
(5) DEDICATORIA Este proyecto se lo dedico a la memoria de mi amada abuelita Rosa Castro Capuñay, a mis padres Miguel Custodio Cachay y Rosa Cerbera Castro que son el sustento de mis sueños, a mis hermanas Albania, Nadezda y Cheyene por brindarme su apoyo, a mis tíos Olinda, Juana y Luis Alberto, a mis primos Marco, Patricia, Alejandra, Joaquín por brindarme su ayuda y a Paola por su apoyo incondicional. Muchas gracias..
(6) AGRADECIMIENTOS A mi mama Rosa, que con su demostración de mujer luchadora me han enseñado a superar los obstáculos y dificultades a lo largo de esta vida. A mi papá Miguel, por enseñarme el sendero de la ciencia y de que siempre hay que luchar por un ideal. A mis amigos de la Planta Siderúrgica del Perú, José Villacorta, Genaro Mora, Romel Guadiamos, Jorge Diestra, Fausto Isla y Melvin Rodríguez por brindarme su apoyo y enseñanzas. A mi Tío Roger Custodio por brindarme su apoyo en la realización de este proyecto. Allng. Aldo German Yenque por contribuir a la creación de esta tesis. Finalmente a mi amigo José Manuel Luque residente en Barcelona, España..
(7) ÍNDICE ASPECTOS DE LA INVESTIGACIÓN. 1. 1.1. ASPECTO INFORMATIVO .............................................................................. 2 1.1.1. Título ....................................................................................................... 2 1.1.2. Personal Investigador ............................................................................. 2 1.1.3. Asesor ..................................................................................................... 2 1.1.4. Área de Investigación ............................................................................. 2 1.1.5. Lugar de Ejecución ................................................................................. 2 1.1.6. Duración Estimada .................................................................................. 2 1.2. ASPECTO DE LA INVESTIGACIÓN CIENT(FICA ........................................... 2 1.2.1. Planteamiento del Problema Científico ................................................... 2 1.2.2. Revisión Bibliográfica .............................................................................. 3 1.2.3. Formulación del Problema Científico ...................................................... 5 1.2.4. Objetivos ................................................................................................. 5 1.2.5. Justificación e Importancia ...................................................................... 5 1.2.6. Hipótesis ................................................................................................. 6 1.2.7. Diseño y Contrastación de Hipótesis ...................................................... 7 1.2.8. Tipo de Investigación .............................................................................. 7 1.2.9. Población y Muestra de Estudio .............................................................. 7 1.2.1 O. Análisis Estadístico de los Datos .......................................................... 7. MARCO TEÓRICO. 8. 2.1. RESERVORIOS ............................................................................................... 9 2.1.1. Consideraciones Básicas ........................................................................ 9 2.2. SISTEMAS SCADA ........................................................................................ 12 2.2.1. Necesidad de un Sistema Scada .......................................................... 13 2.2.2. Funciones de un Sistema Scada .......................................................... 14 2.2.3. Requisitos para el Sistema Scada ........................................................ 14 2.2.4. Implementación de Sistema S cada Funcional ...................................... 15 2.2.5. Sistema Scada Wonderware lntouch .................................................... 15 2.2.5.1. Beneficios ....................................................................................... 16.
(8) indice 2.2.5.2. Capacidades ................................................................................... 16 2.2.6. Servidor OPC ......................................................................................... 17 2.2.6.1. FsGateway ......................................................... ;........................... 18 2.3. CONTROLADORES LOGICOS PROGRAMABLES ....................................... 19 2.3.1. Componentes ....................................................................................... 19 2.3.2. Distribución de los PLC's ...................................................................... 21 2.3.3. Lenguajes de Programación de los PLC's ............................................ 22 2.3.3.1. Lenguaje Ladder ............................................................................. 22 2.3.4. PLC Micrologix ...................................................................................... 23 2.3.4.1. Micrologix 1100 (1763-L 16AWA) .................................................... 23 2.3.4.2. Micrologix 1400 (1766-L32AWA) .................................................... 23 2.4. SENSORES ................................................................................................... 24 2.4.1. Tipos de Sensores ................................................................................ 24 2.4.2. Sensores Ultrasónicos .......................................................................... 25 2.4.2.1. Principio de funcionamiento ............................................................ 25 2.4.2.2. Medidor de Nivel Ultrasónico .......................................................... 26 2.4.2.3. Medidor de Flujo Ultrasónico .......................................................... 28 2.5. ACTUADORES .............................................................................................. 30 2.5.1. Historia .................................................................................................. 30 2.5.2. Actuador Rotatorio Eléctrico ................................................................. 31 2.5.2.1. Dimensionamiento de un actuador Rotatorio Eléctrico ................... 31 2.5.3. Válvula Mariposa .................................................................................. 33 2.5.3.1. Funcionamiento .............................................................................. 33 2.5.3.2. Ventajas y Desventajas .................................................................. 34 2.5.4. Dimensionamiento de la Válvula ........................................................... 34 2.5.4.1. Fórmula General ............................................................................. 35 2.6. MOTORES ELÉCTRICOS ............................................................................. 37 2.6.1. Características Eléctricas del Motor ...................................................... 37 2.6.1.1. Voltaje ............................................................................................. 37 2.6.1.2. Intensidad de Corriente .................................................................. 38 2.6.1.3. Potencia .......................................................................................... 38 ii.
(9) lndice 2.6.1.4. Rendimiento ................................................................................... 39 2.6.1.5. Velocidad Nominal.. ........................................................................ 39 2.6.2. Devanados del Motor ............................................................................ 40 2.6.3. Métodos de Arranque de los Motores Trifásicos ................................... 41 2.6.3.1. Arranque Directo ............................................................................ 41 2.6.3.2. Arranque Estrella Triangulo ............................................................ 42 2. 7. BOMBAS ......................................................................................................... 43 2. 7 .1. Características Hidráulicas de la Bomba .............................................. 43 2. 7. 1. 1. Potencia de la Bomba ..................................................................... 43 2.7.2. Bomba Centrifuga ................................................................................. 44 2.7.2.1. Curva de la bomba ......................................................................... 45 2.8. ARRANCADORES DE ESTADO SOLIDO ..................................................... 47 2.8.1. Generalidades ....................................................................................... 47 2.8.2. Variantes de Arrancadores de Estado Solido ....................................... 49 2.8.3. Comparación con el Arranque Estrella -Triangulo ................................ 50 ESTUDIO DE LA REALIDAD DE LA EMPRESA EPSEL S.A.. 52. 3.1. INTRODUCCIÓN ........................................................................................... 53 3.2. PRODUCCIÓN ............................................................................................... 55 3.3. DESCRIPCION DEL PROCESO DE TRATAMIENTO DE AGUA .................. 56 3.3.1. Fase 01: Planta de Tratamiento N°01 ................................................... 57 Coagulación ................................................................................................. 59 Floculación .................................................................................................. 59 Decantación ................................................................................................. 60 Filtración ...................................................................................................... 60 Desinfección····································'··························································· 61 3.3.1.1. Electrobombas De La Planta De Tratamiento N°01 ....................... 63 3.3.1.2. Tableros de Fuerza ......................................................................... 65 3.3.2. Fase 02: Planta de Tratamiento N°02 ................................................... 66 Precloración ................................................................................................. 68 Coagulación ................................................................................................. 69 Floculación-Decantación ............................................................................. 70 iii.
(10) fndice Filtración ...................................................................................................... 71 Desinfección ................................................................................................ 73 3.3.2.1.Reservorios ..................................................................................... 75 3.3.2.2.Volúmenes Obtenidos en Los Reservorios ...................................... 85 3.3.2.3.Eiectroválvulas Instaladas en los Reservorios ................................. 89 3.3.2.4.Eiectrobombas de la Planta de Tratamiento N°02 ........................... 91 3.3.2.5.Tableros de Fuerza ......................................................................... 92 3.3.2.6.Eiementos de Medida y Actuadores ................................................ 94 3.4.VENTAJAS Y DESVENTAJAS DE LAS PLANTAS DE TRATAMIENTO ........ 96 3.4.1. Ventajas ................................................................................................ 96 3.4.2. Desventajas .......................................................................................... 96. DISEÑO DE LOS RADIOENLACES. 98. 4.1. INTRODUCCIÓN ........................................................................................... 99 4.1.1. Ubicación de los Puntos a Enlazar ..................................................... 100 4.1.2. Distancia y Altura entre los Puntos a Enlazar ..................................... 100 4.1.3. Equipos a Usar ................................................................................... 101 4.2. CÁLCULO DEL RADIOENLACE ENTRE LA BASE Y EL R. OESTE. .......... 101 4.2.1. Presupuesto de Potencia .................................................................... 101 4.3. CÁLCULO DEL RADIOENLACE ENTRE LA BASE Y EL R. NORTE .......... 103 4.3.1. Presupuesto de Potencia ..................................................................... 103 4.4. CÁLCULO DEL RADIOENLACE ENTRE LA BASE Y EL R. SUR ............... 105 4.4.1. Presupuesto de Potencia .................................................................... 105 4.5. CÁLCULO DEL RADIOENLACE ENTRE LA BASE Y EL R. FERRÉ .......... 107 4.5.1 Presupuesto de Potencia ..................................................................... 107 4.6. SIMULACIÓN DE LOS ENLACES CON RADIO MOBILE ............................ 109 4.6.1. Ingreso de los Datos de la Ubicación Geográfica ............................... 109 4.6.2. Ingreso de las Características de los Enlaces .................................... 112 4.6.3. Creación de los Sistemas a Enlazar ................................................... 114 4.6.4. Simulación de los Radio Enlaces ........................................................ 116 4.6.4. Cobertura de Vista de las Antenas ..................................................... 121. iv.
(11) indice DISEÑO DEL SISTEMA. 125. 5.1. INTRODUCCIÓN ......................................................................................... 126 5.1.1. Fórmulas para el Diseño ..................................................................... 126 5.1.2. Justificación de la Potencia de las Electrobombas de la Sala de Bombeo N°400 ......................................................................................................... 128 5.2. RESERVORIOS ........................................................................................... 134 5.2.1. Elementos Primarios de Control ......................................................... 134 5.2.1.1. Transmisor de Nivel Ultrasónico ...................................................... 134 5.2.1.2. Transmisor de Flujo Ultrasónico ................................................... 136 5.2.2. Elementos Finales de Control ............................................................. 137 5.2.2.1. Actuador Eléctrico ........................................................................ 137 5 ..3. SALA DE BOMBEO No200 ........................................................................... 138 5.3.1. Elementos Finales De Control ............................................................ 138 5.3.1.1. Control Mediante el Arranque Estrella-Triangulo .......................... 138 5.3.1.2. Control Mediante Arrancador Suave ............................................ 141 5.4. SALA DE BOMBEO N°400 ........................................................................... 145 5.4. 1. Elementos Finales De Control ............................................................ 145 5.4.1.1. Arrancador de estado sólido ......................................................... 145 5.4.1.2. Motores ......................................................................................... 146 5.4.1. 3. Válvula y Actuador Eléctrico ......................................................... 148 5.5. DISEJ\10 DEL PROCESO ............................................................................. 152 5.5.1. PLC ..................................................................................................... 152 5.5.2. Instalación de los Elementos de Control al PLC ................................. 155 5.5.2.1. Conexión de los Elementos Primarios de Control ........................ 155 5.5.2.2. Conexión de los Elementos Finales de Control. ........................... 156 5.5.3. Configuración de Entradas y Salidas del PLC .................................... 160 5.5.3.1. Etiquetado de las E/S ................................................................... 162 5.5.4. Configuración del PLC ........................................................................ 164 5.5.4.1. Diagrama de Flujo ........................................................................ 164 5.6. CONFIGURACIÓN DEL SISTEMA SCADA ................................................. 190 5.6.1. Barra de Navegación .......................................................................... 190 V.
(12) lndice 5.6.2. Ventana de Procesos .......................................................................... 191 5.6.2.1. Ventana Principal ......................................................................... 191 5.6.2.2. Ventana de Sala de Bombeo N°200 ............................................. 192 5.6.2.3. Ventana de Sala de Bombeo No 400 ............................................ 193 5.6.2.4. Ventana de los Reservorios .......................................................... 197 5.6.3. Servidor OPC ...................................................................................... 199 5.7. MODELO MATEMATICO DEL SISTEMA .................................................... 200 5.7.1. Balance de Masa ................................................................................ 201 5.7.2. Balance de Energía ............................................................................ 201 5.7.3. Simulación del Modelo ........................................................................ 203 5.7.3.1. Reservaría Oeste .......................................................................... 204 5.7.3.2. Reservorio Norte .......................................................................... 205 ANÁLISIS DE LOS RESULTADOS. 207. 6.1. AUMENTO DEL ALMACENAMIENTO DE AGUA EN LOS RESERVORIOS .................................................................................................. 208 6.1.1. Volúmenes de los Reservarías después de la Implementación .......... 208 6.2.ELIMINACIÓN DEL PICO DE CORRIENTE Y LA REDUCCIÓN DEL CONSUMO DE ENERGIA EN LA SALA DE BOMBEO N°200 ........................... 214 6.3. COMPROBACIÓN DE LA SUPERVICIÓN DE LAS VARIABLES DE CONTROL ................................................................................................... 216 6.3.1. Conexión de los Instrumentos y Configuración del PLC ..................... 219 6.3.2. Configuración del Sistema de Supervisión ......................................... 229 6.4.. ANÁLISIS DE LA VARIACIÓN DEL NIVEL ............................................... 231. PRESUPUESTO PARA LA INVERSIÓN. 236. 7.1. PRESUPUESTO .............................................. ;........................................... 237 7 .1.1. Sistema de Comunicación .................................................................. 237 7 .1.2. Sistema de Supervisión ...................................................................... 237 7.1.3. Sistema de Control ............................................................................. 238 7 .1.4. Sistema de Potencia ........................................................................... 239 7 .1.5. Mano de Obra ..................................................................................... 239 7.1.6. Costo Total de la Inversión ................................................................. 240 vi.
(13) lndice 7 .1. 7. Actual Ganancia la Empresa Epsel. .................................................... 240. 7 .1.8. Ganancia Implementando el Sistema de Monitoreo y Control ............ 241 CONCLUSIONES Y RECOMENDACIONES. 243. 8.1. CONCLUSIONES ......................................................................................... 244 8.2. RECOMENDACIONES ................................................................................ 245. APÉNDICE A. 247. A.1. GENERALIDADES ...................................................................................... 248 A.2. PROTOCOLO MODBUS ............................................................................. 248 A.2.1. Descripción del Protocolo ................................................................... 249 A.2.2. Comunicación Serial ........................................................................... 251. f·. APÉNDICE 8. 254. APÉNDICE C. 255. Bibliografía. 256. Índice de Cuadros. 259. Índice de Figuras. 262. vii.
(14) INTRODUCCIÓN El proyecto se diseñó para la Empresa Prestadora de Servicios de Saneamiento de Lambayeque S.A (EPSEL), la cual hace uso de las aguas almacenadas en el Reservorio de Tinajones para posteriormente ser conducidas hacia dos lagunas de almacenamiento llamadas Boró 1 y Boró 11 las cuales tiene una capacidad de 500,000 m 3 fs y 1'500,000 m 3 fs, luego este elemento es dirigido a las dos Plantas de Tratamiento que posee dicha empresa y finalmente es distribuida tanto a la ciudad como a sus distritos. La empresa para poder realizar una buena distribución de este elemento el cual es muy importante para la vida de la ciudad, cuenta con cuatro reservorios elevados ubicados alrededor de la ciudad los cuales son operados manualmente, disponiendo para este fin a cuatro operarios en tres turnos diferentes quienes se encargan de la verificación del nivel, y accionamiento tanto de las válvulas de entrada como de salida y junto con el operario de la Planta de Tratamiento No02 coordinan vía radio o celular en que momento detener las electrobombas que alimentan a estos. La Planta de Tratamiento N°01 quien distribuye el agua tratada directamente a las redes domiciliarias posee cuatro electrobombas las cuales son accionadas manualmente a través del arranque directo, produciéndose deterioro de los motores debido a los picos de corriente, los cuales generan un consumo considerable de energía perjudicando a la empresa. Para dar un uso más eficiente las electrobombas de las Plantas de Tratamiento N°01 y 02 y de los Reservorios Elevados, se procedió a automatizar y luego realizar la operación remota con la implementación de un sistema de radio enlace en el caso de los reservorios.. viii.
(15) RESUMEN El diseño de este proyecto se implementará en los cuatro reservorios elevados denominados Oeste, Norte, Sur y Ferré, ubicados en los distritos de José Leonardo Ortiz, la Victoria y en la Ciudad de Chiclayo, los cuales serán automatizados para tener un manejo del nivel, flujo y accionamiento de las válvulas de entrada y de salida, todo esto por medio de controladores lógicos programables que serán comunicados remotamente por medio de radio enlaces hacia la empresa. En la Planta de Tratamiento N°01 se realizará la puesta en marcha de las electrobombas por medio de arrancadores de estado solidos los cuales pondrán fin a los picos de corriente y por lo tanto reducir el consumo de energía. Las lecturas de las medidas de los valores de corriente así como el funcionamiento de los arrancadores de estado sólido de las Plantas de Tratamiento No 01 y 02 que bombean agua hacia la ciudad y los reservorios serán enviadas hacia un PLC central el cual mediante un sistema SCADA central.izará estas medidas y se podrá efectuar la operación a distancia de los reservorios elevados. Tener la información en tiempo real gracias al sistema SCADA en el Centro de Control ubicado en la empresa facilita el uso de todos los equipos sobre todo en los reservorios ya que permite la regulación y un mejor manejo del recurso hídrico. Con la consolidación de este proyecto se pretende reducir los costos de operación ya que se evita tener a doce operarios en dichos reservorios, también se permite registrar el consumo diario de agua por medio de una base de datos, la cual estará disponible para la jefatura de la parte operativa, permitiendo tener una mejor administración de sus recursos.. ix.
(16) ABSTRACT The design of this project will be implemented in the four elevated reservoirs called West, North, South and Ferré, located in the districts of Jase Leonardo Ortiz, the Victoria and the city of Chiclayo, which will be automated to have a management level flow and valve actuation input and output, all via programmable logic controllers to be communicated remotely via radio links to the company. In Treatment Plant N°01 commissioning of pumps are made using solid-state starters, which will end the current peaks and thus reduce energy consumption. Readings measures the current values as well as the operation of solid-state starters of Treatment Plants No. 01 and 02 pumping into town. a~d. reservoirs will be sent to. a central controller which through a SCADA system centralize these steps and you can make the remete operation of the elevated reservoirs. Having the information in real time through the SCADA system control center located in the hotel allows the use of all equipment especially in reservoirs and for dimming and better management of water resources. With the consolidation of this project is to reduce operating costs because it avoids having to nine operators in these reservoirs, it also allows you to record your daily intake of water through a database, which will be available to the leadership of the operational side, allowing a better management of their resources.. X.
(17) ASPECTOS DE " INVESTIGACION. LA. CAPÍTULO 1. 1.
(18) 1. Aspectos de la Investigación. 1.1. ASPECTO INFORMATIVO 1.1.1. Título "Diseño de un sistema remoto para el monitoreo y control de reservorios en el distrito de Chiclayo". 1.1.2. Personal Investigador Bach. Miguel Custodio Corbera Código. : 062264-8. Dirección. : Mariscal Castilla 899-Monsefú.. E-mail. : [email protected]. Teléfono. : 942883145. 1.1.3. Asesor lng. Víctor Olegario Jara Sandoval.. 1.1.4. Área de Investigación Área de Control y Automatización.. 1.1.5. Lugar de Ejecución Universidad Nacional Pedro Ruiz Gallo- Lambayeque.. 1.1.6. Duración Estimada Cuatro Meses aproximadamente.. 1.2. ASPECTO DE LA INVESTIGACIÓN CIENTÍFICA 1.2.1. Planteamiento del Problema Científico En la empresa EPSEL S.A, localizada en la Av. Carlos Castañeda N° 100- Chiclayo, el requerimiento de agua para el abastecimiento de la ciudad es de suma importancia ya que sin este líquido elemento o el mal manejo de este, podría causar problemas sociales.. 2.
(19) 1. Aspectos de la 1nvestigación El abastecimiento de agua para la ciudad de Chiclayo, tiene como fuente principal la captación y conducción de las aguas superficiales que abastecen al Valle Chancay - Lambayeque y afluentes, que discurren a la vertiente Atlántica a través de las obras de derivación de la primera etapa del Proyecto de Tinajones; actualmente la empresa cuenta con cuatro reservorios (tanques elevados) que se encuentran distribuidos en el distrito de Chiclayo y que son alimentados por la planta de tratamiento N°02; los cuales son llenados a través de tres electrobombas, estas transfieren el agua desde la antecámara principal ubicada en la misma planta de tratamiento en dicha ciudad hacia estos; uno de los principales problemas que atraviesa la empresa es que no cuenta con un monitoreo y control remoto del nivel de los reservorios, ya que el centro de operaciones se encuentra en la misma planta. Otro inconveniente que se tiene es que el control del nivel de los reservorios se hace vía radio, disponiendo para este fin a cuatro operadores en cada turno, quienes diariamente permanecen en los reservorios para poder visualizar el nivel y poder coordinar con el centro de control en qué momento detener las electrobombas. Lo mismo sucede con el manejo de la planta de tratamiento N°1 que inyecta agua directamente a las redes domiciliarias a través de tres electrobombas; tanto el control de las medidas de los caudales de estas y sus parámetros eléctricos no se encuentran centralizadas en ningún sistema de supervisión. Por consiguiente se dará solución a todas estas ineficiencias que traen consigo consecuencias muy graves tanto para la ciudad como para la empresa a través de un sistema de monitoreo remoto de todas las variables.. 1.2.2. Revisión Bibliográfica •. Hernández Espinosa, Juan Carlos (2006). Automatización y control a distancia de los reservorios San Diego, para obtener el título de Ingeniero Electrónico en la Universidad Pontificia Universidad Católica del Perú.. 3.
(20) 1. Aspectos de la Investigación En la presente tesis se implementó un sistema de automatización para los reservorios ubicados en San Diego, que son usados durante la época de estiaje para almacenar agua del río; para así tener lecturas exactas de los sensores de nivel y posición de las compuertas. •. Borjas Aldaz Ronald -Paredes Coque Byron (2007) Diseño y construcción de un módulo didáctico para el control de nivel de líquidos, para obtener el título de Ingeniero en Electrónica y Control en la Escuela Politécnica Nacional-Ecuador. En la presente tesis tiene la finalidad de dotar a su Laboratorio de Instrumentación de un equipo nuevo con el cual los estudiantes puedan realizar sus prácticas de medición, control y monitoreo de la variable de nivel del líquidos.. •. Empresa De Servicios De Agua Potable Y Alcantarillado De LimaSEDAPAL (2008) Sistema de automatización de las estaciones remotas locales y su integración con el sistema scada del centro principal control de SEDAPAL. En el presente proyecto SEDAPAL en su lineamiento de ampliar y prestar mejores servicios de abastecimiento agua potable y alcantarillado en las zonas periféricas de la ciudad de Lima viene ejecutando proyectos que permitirán el acceso a la población de estos servicios básicos. Como parte de la optimización de estas obras se está considerando que la operación de cada una de estas esté automatizada e integrada al Sistema SCADA en lo que respecta a sus instalaciones hidráulicas (pozos, reservarías, rebombeos, entradas a sector, etc.) que se interconectarán a la red de distribución primaria de agua potable.. Dichos proyectos involucran niveles de. automatización local o entre estaciones y generalmente la Integración hacia el centro principal de control.. 4.
(21) 1. Aspectos de la Investigación. 1.2.3. Formulación del Problema Científico ¿Cómo se podrá monitorear y controlar de manera eficiente el nivel de los reservarías de forma remota?. 1.2.4. Objetivos 1.2.4.1. Objetivo General Diseño de un sistema remoto para el monitoreo y control de reservorios en el distrito de Chiclayo.. 1.2.4.2. Objetivos Específicos •. Diseñar un sistema de supervisión en tiempo real para muestrear las variables de nivel y caudal.. •. Realizar una red WLAN para poder comunicar el centro de operaciones (Plata de Tratamiento) con los reservarías.. •. Centralizar todas las medidas de los caudales, así como también el accionamiento de todas las bombas en el sistema de supervisión.. •. Simular el diseño del sistema remoto de monitoreo y control.. •. Comprobar con un prototipo a escala el cual se asemeje al funcionamiento de los reservarías, para la verificación de la comunicación y supervisar las variables de control.. •. Seleccionar equipos de control y de instrumentación industrial, que cumplan los requisitos del diseño.. 1.2.5. Justificación e Importancia Siendo el agua un elemento primordial para la vida en el planeta, y para que los grupos humanos junto con el ecosistema puedan prevalecer y prosperar, esta debe ser limpia, permanecer limpia y sobre todo que esté al alcance de todos. En la empresa EPSEL S.A el tratamiento y la distribución de este elemento es de suma importancia para la ciudad de Chiclayo como para algunos de sus distritos 5.
(22) 1. Aspectos de la Investigación que se encuentran alrededor ya que esta sirve tanto para el consumo humano como para el uso industrial. Actualmente para poder abastecer a la población de Chiclayo y sus distritos, la empresa posee un equipo del bombeo, que envía el agua directamente a las redes, durante 16 horas al día con un caudal aproximado de 1200 lt/s. Un porcentaje del agua tratada es bombeada directamente a cuatro reservorios ubicados en los alrededores de la ciudad los cuales son: Moshoqueque-Tanque Norte con una capacidad de 3000 m 3 , La Victoria-Tanque Sur con 3000 m 3 , Centro de ChiclayoTanque Diego Ferre con 2000 m 3 , y P.J Cruz de la Esperanza-Tanque Apoyado Oeste con 5000 m 3 respectivamente, estos son operados de forma manual es decir se necesita que un operador esté presente en el momento del llenado para que pueda comunicar el instante de parar las bombas; permaneciendo diariamente en las instalaciones, para realizar dicha acción. Un aspecto fundamental para la empresa es evitar que el agua se desperdicie por situaciones no controladas; han existido ocasiones en las cuales los reservorios han superado su máximo nivel y producto de esto los operadores se ven afectados directamente, generando costos extras para la empresa. Por lo expuesto surge la necesidad de poder optimizar los reservorios, facilitando así el monitorio de todas las variables que se tienen, todo esto a través de un sistema de supervisión centralizado, para finalmente hacer un buen uso del recurso hídrico el cual es muy importante para la empresa y la ciudad.. 1.2.6. Hipótesis Para verificar el nivel del agua en los reservorios se hará el diseño de un sistema remoto para el monitoreo y control, con esto se pretende dar un buen uso del recurso hídrico, así como también reducir la posibilidad de que los reservorios excedan su capacidad máxima de nivel y evitar que los operarios permanezcan diariamente en dichos reservorios.. 6.
(23) 1. Aspectos de la Investigación. 1.2.7. Diseño y Contrastación de Hipótesis Si el desarrollo del sistema remoto para el monitoreo y control de reservorios en el distrito de Chiclayo ayuda a prevenir futuros accidentes en el cual los operadores se vean afectados así como también evitando la permanencia diaria de los operadores en dichas instalaciones, entonces beneficiará a la empresa Epsel S.A. permitiéndole minimizar los costos destinados para este proceso.. 1.2.8. Tipo de Investigación A) Investigación Teórica. i.. Investigación Teórica Empírica:. Porque se hace uso de las experiencias y datos obtenidos a nivel de campo, todo esto para poder explicar el correcto funcionamiento del sistema de monitoreo remoto. B) Investigación Tecnológica. i.. Tecnológica - Física:. Porque el sistema investigado está en el campo de la física aplicada ya que se manejaran variables de nivel y flujo, todo esto centralizado en un sistema de supervisión.. 1.2.9. Población y Muestra de Estudio. La Población Universo/Muestra son los reservarías ubicados en el distrito de Chiclayo y la empresa EPSEL S.A.. 1.2.1 O. Análisis Estadístico de los Datos Los datos recolectados han sido procesados previamente por equipos que se encuentran actualmente instalados en el centro de operación y reservorios, estos cumplen con todos los estándares propuestos por la ISA (lnternational Society of Automation). 7.
(24) ". MARCO TEORICO CAPÍTULO 11. 8.
(25) 2. Marco Teórico. 2.1. RESERVORIOS La importancia de este elemento radica en garantizar el funcionamiento hidráulico del sistema y el mantenimiento de un servicio eficiente, en función a las necesidades de agua proyectadas y el rendimiento admisible de la fuente. Las instalaciones de almacenamiento de agua tratada desempeñan una función vital en el abastecimiento de agua segura, adecuada y confiable. Las escuelas, hospitales, asilos, fábricas y casas particulares dependen de un abastecimiento constante y confiable de agua segura.. 2.1.1. Consideraciones Básicas Los aspectos más importantes a considerarse para el diseño son la capacidad, ubicación y tipo de reservorio:. A) Capacidad del Reservorio Para determinar la capacidad del reservorio, es necesario considerar la compensación de las variaciones horarias, emergencias para incendios, previsión de reservas para cubrir daños e interrupciones en la línea de conducción y que el reservorio funcione como parte del sistema. Para el cálculo de la capacidad del reservorio, se considera la compensación de variaciones horarias de consumo y los eventuales desperfectos en la línea de conducción. El reservorio debe permitir que la demanda máxima que se produce en el consumo sea satisfecha a cabalidad, al igual que cualquier variación en el consumo registrada en las 24 horas del día. Ante la eventualidad de que en la línea de conducción pueda ocurrir daños que mantengan una situación de déficit en el suministro de agua mientras se hagan las reparaciones pertinentes, es aconsejable un volumen adicional que de oportunidad de reestablecer la conducción de agua hasta del reservorio.. B) Tipos de Reservorios Los reservorios de almacenamiento pueden ser elevados, apoyados y enterrados. Los elevados, que generalmente tiene forma cilíndrica y de. 9.
(26) 2. Marco Teórico paralelepípedo, son construidos sobre torres, columnas, pilotes, etc; los apoyados, que principalmente tiene forma rectangular y circular, son construidos directamente sobre la superficie del suelo; y los enterrados, de forma rectangular, son construidos por debajo de la superficie del suelo (cisternas). Para capacidades medianas y pequeñas, como es el caso de los proyectos de abastecimiento de agua potable en poblaciones rurales resulta tradicional y económica la construcción de un reservorio apoyado de forma cuadrada o cilíndrica. C) Ubicación del Reservorio La ubicación está determinada principalmente por la necesidad y conveniencia de mantener la presión en la red dentro de los límites de servicio, garantizando presiones mínimas en las viviendas más elevadas y presiones máximas en las viviendas más bajas. De acuerdo a la ubicación, los reservorios pueden ser de cabecera o flotantes. En el primer caso se alimentan directamente de la captación pudiendo ser por gravedad o bombeo y elevados o apoyados, y alimentan directamente de agua a la población. En el segundo caso, son típicos reguladores de presión, casi siempre son elevados y se caracterizan porque la entrada y la salida del agua se hacen por el mismo tubo.. O) Caseta de Válvulas Todos los reservorios poseen estos elementos y que se mencionan a continuación: •. Tubería de llegada El diámetro está definido por la tubería de conducción, debiendo estar provista de una válvula compuerta de igual diámetro antes de la entrada al reservorio de almacenamiento; debe proveerse de un bypass para atender situaciones de emergencia. 10.
(27) 2. Marco Teórico •. Tubería de salida. El diámetro de la tubería de salida será el correspondiente al diámetro de la línea de aducción y deberá estar provista de una válvula tipo mariposa que permita regular el abastecimiento de agua a la ciudad. •. Tubería de Limpia. La tubería de limpia deberá tener un diámetro tal que facilite la limpieza del reservorio de almacenamiento en un periodo no mayor de 3 horas. •. Tubería de Rebose. La tubería de rebose se conectara con descarga libre a la tubería de limpia y no se proveerá de válvula compuerta, permitiéndose la descarga de agua en cualquier momento. •. Tubería de By-pass. Se instala una tubería con una conexión directa entre la entrada y la salida, de manera que cuando se cierre la tubería de entrada al reservorio de almacenamiento, el caudal ingrese directamente a la línea de aducción. Esta constara de una válvula de mariposa que permite el control del flujo de agua con fines de mantenimiento y limpieza del reservorio. E) ·Perdidas en las Tuberías •. Pérdidas De Carga Friccionales. Al circular el agua por una tubería, dado que lleva una cierta velocidad, al rozar con las paredes de las tuberías pierde parte de la velocidad por la fricción que se produce entre el material líquido contra el sólido de las paredes. En tanto mayor es la velocidad mayor será el roce. La pérdida por fricción se define como la pérdida de energía producto de la resistencia que la cañería opone al paso del agua. La fórmula general tiene la siguiente expresión:. 11.
(28) 2. Marco Teórico Q1.85. Af = (0,28. C)1.ss. D4.86. L. Donde: Af=Pérdida de energía o carga producto de la fricción, en mea. Q= Caudal a transportar, en m 3 js. O= Diámetro interno de la tubería, en m. L= Longitud de la tubería de conducción, en m. C= Coeficiente de rugosidad, adimensional.. •. Pérdidas De Carga Singulares: Las pérdidas de energía o cargas menores se producen cuando la tubería induce el agua a cambiar de dirección, o se cambia la sección misma de la tubería. Estas pérdidas se pueden producir por codos, reducciones de diámetro, válvulas o llaves, o cualquier obstrucción que encuentre el agua que le impida seguir circulando en línea recta normalmente. La ecuación para calcular estas pérdidas está dada por:. Donde: As =Pérdidas de cargas singulares o menores, en mea. V= Velocidad de circulación del agua, en m/s g = Aceleración de la gravedad (9.8 m/s 2) K = Constante adimensional de coeficiente de resistencia que depende de los accesorios.. 2.2. SISTEMAS SCADA SCADA es un acrónimo por "Supervisory Control And Data Adquisition" (control supervisor y adquisición de datos). Los sistemas SCADA utilizan la computadora y tecnologías de comunicación para automatizar el monitoreo y control de procesos 12.
(29) 2. Marco Teórico industriales. Estos sistemas son partes integrales de la mayoría de los ambientes industriales complejos o muy geográficamente dispersos, ya que pueden recoger la información de una gran cantidad de fuentes muy rápidamente, y la presentan a un operador en una forma amigable. Los sistemas SCADA mejoran la eficacia del proceso de monitoreo y control proporcionando la información oportuna para poder tomar decisiones operacionales apropiadas. Un sistema Scada consiste en una computadora principal o "master" (generalmente llamada Estación Maestra, "Master Terminal Unit" o MTU); una o más unidades control obteniendo datos de campo (generalmente llamadas estaciones remotas, "Remate Terminal Units," o RTU); y una colección de software estándar y/o a la medida usado para monitorear y controlar remotamente dispositivos de campo. Los sistemas SCADA contemporáneos exhiben predominantemente características de control a lazo abierto y utilizan comunicaciones generalmente interurbanas, aunque algunos elementos de control a lazo cerrado y/o de comunicaciones de corta distancia pueden también estar presentes.. 2.2.1. Necesidad de un Sistema Scada Para evaluar si un sistema SCADA, el proceso a controlar debe cumplir las siguientes características: •. Si el número de variables del proceso que se necesita monitorear es alto.. •. El proceso está geográficamente distribuido. Esta condición no es limitativa, ya que puede instalarse un SCADA en un proceso concentrado en una localidad.. •. La información del proceso se necesita en tiempo real.. •. La necesidad de optimizar y facilitar las operaciones de la planta, así como la toma de decisiones, tanto gerenciales como operativas.. •. Los beneficios obtenidos en el proceso justifican la inversión en un sistema SCADA. Estos beneficios pueden reflejarse como aumento de la efectividad de la producción, de los niveles de seguridad, etc.. 13.
(30) 2. Marco Teórico •. La complejidad y velocidad del proceso permiten que la mayoría de las acciones de control sean iniciadas por un operador. En caso contrario, se requerirá de un Sistema de Control Automático.. 2.2.2. Funciones de un Sistema Scada •. Recabar, almacenar y mostrar información, en forma continua y confiable, correspondiente a la señalización de campo: estados de dispositivos, mediciones, alarmas, etc.. •. Ejecutar acciones de control iniciadas por el operador, tales como: abrir o cerrar válvulas, arrancar o parar bombas, etc.. •. Alertar al operador de cambios detectados en la planta, tanto aquellos que no se consideren normales (alarmas) como cambios que se produzcan en la operación diaria de la planta. Estos cambios son almacenados en el sistema para su posterior análisis.. •. Aplicaciones en general, basadas en la información obtenida por el sistema, tales como: reportes, gráficos de tendencia, historia de variables, cálculos, predicciones, detección de fugas, etc.. 2.2.3. Requisitos para el Sistema Scada •. Estos son algunos de los requisitos que debe cumplir un sistema Scada para sacarle el máximo provecho:. •. Deben ser sistemas de arquitecturas abiertas, capaces de crecer o adaptarse según las necesidades cambiantes de la empresa.. •. Deben comunicarse con total facilidad y de forma transparente para el .usuario con el equipo de planta ("drivers") y con el resto de la empresa (acceso a redes locales y de gestión).. 14.
(31) 2. Marco Teórico •. Los programas deberán ser sencillos de instalar, sin excesivas exigencias, y fáciles de utilizar, con interfaces amables con el usuario (sonido, imágenes, pantallas táctiles, etc.).. 2.2.4. Implementación de Sistema Scada Funcional Cuando una empresa decide implementar un sistema SCADA sobre su instalación hay 5 fases básicas a tener en cuenta para llevar a cabo el proceso:. •. Fase 1: El diseño de la arquitectura del sistema, esto incluye todas las consideraciones importantes sobre el sistema de comunicaciones de la empresa (Tipo de BUS de campo, distancias, número de E/S, Protocolo del sistema y Drivers ... ). También se verán involucrados los tipos de dispositivos que no están presentes en la planta pero que serán necesarios para supervisar los parámetros deseados.. •. Fase 2: Equipamiento de la empresa con , los elementos necesarios, comunicaciones, equipos HMI y Hardware en general, adquisición de un paquete software SCADA adecuado a la arquitectura y sistemas de la planta.. •. Fase 3: La instalación del equipo de comunicación y el sistema PC.. •. Fase 4: Programación, tanto del equipamiento de comunicaciones como de los equipos HMI y software SCADA.. •. Fase 5: Testeo del sistema o puesta a punto, durante el cual los problemas de programación en comunicaciones como en el software SCADA son solucionados.. 2.2.5. Sistema Scada Wonderware lntouch Wonderware lnTouch HMI ofrece funciones de visualización gráfica que llevan sus capacidades de gestión de operaciones, control y optimización a un nivel completamente nuevo. Aquello que ahora se conoce en la industria como HMI (Human Machine Interface) comenzó hace más de veinte años con el software lnTouch. Ningún otro HMI en el mercado puede compararse al software lnTouch en 15.
(32) 2. Marco Teórico términos de innovación, integridad de arquitectura, conectividad e integración de dispositivos, ruta de migración de versiones de software sin interrupciones y facilidad de uso. Esto se traduce en sistemas basados en estándares que permiten incrementar al máximo la productividad, optimizar la efectividad del usuario, mejorar la calidad y reducir los costos operacionales, de desarrollo y de mantenimiento. 2.2.5.1. Beneficios •. Facilidad de uso que le permite a desarrolladores y operarios ser más productivos de manera simple y rápida. •. Gran integración de dispositivos y conectividad a prácticamente todos los dispositivos y sistemas. •. Sus capacidades de representación gráfica y la interacción con sus operaciones permiten entregar la información correcta a las personas correctas en el momento correcto. •. Migración de versiones de software sin interrupción, lo que significa que la inversión en sus aplicaciones HMI está protegida.. 2.2.5.2. Capacidades • . Gráficos de resolución. independiente y símbolos inteligentes que. visualmente dan vida a su instalación directamente en la pantalla de su computadora. •. Sofisticado sistema de scripting para extender y personalizar aplicaciones en función de sus necesidades específicas.. •. Alarmas distribuidas en tiempo real con visualización histórica para su análisis.. •. Graficas de tendencias históricas integradas y en tiempo real.. •. Integración con controles Microsoft ActiveX y controles .NET. •. Librería extensible con más de 500 de objetos y gráficos prediseñados, "inteligentes" y personalizables.. 16.
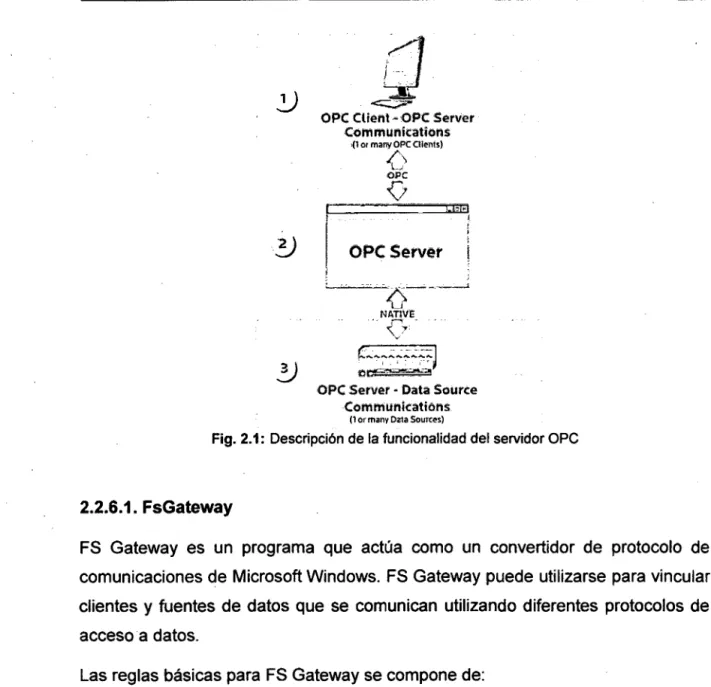
(33) 2. Marco Teórico. 2.2.6. Servidor OPC Un servidor OPC es una aplicación de software (driver) que cumple con una o más especificaciones definidas por la OPC Foundation. El Servidor OPC hace de interiaz comunicando por un lado con una o más fuentes de datos utilizando sus protocolo nativos (típicamente PLCs, DCSs, básculas, Modules 1/0, controladores, etc.) y por el otro lado con Clientes OPC (típicamente SCADAs, HMis, generadores de informes, generadores de gráficos, aplicaciones de cálculos, etc.). En una arquitectura Cliente OPC/ Servidor OPC, el Servidor OPC es el esclavo mientras que el Cliente OPC es el maestro. Las comunicaciones entre el Cliente OPC y el Servidor OPC son bidireccionales, lo que significa que los Clientes pueden leer y escribir en los dispositivos a través del Servidor OPC. Existen cuatro tipos de servidores OPC definidos por la OPC Foundation, y son los siguientes: •. Servidor OPC DA - Basado en Spezifikationsbasis: OPC Data Access especialmente diseñado para la transmisión de datos en tiempo real.. •. Servidor OPC HDA- Basado en la especificación de Acceso a Datos Historizados que provee al Cliente OPC HDA de datos históricos.. •. Servidor OPC A&E Server- Basado en la especificación de Alarmas y Eventos - transfiere Alarmas y Eventos desde el dispositivo hacia el Cliente OPCA&E.. •. Servidor OPC UA - Basado en la especificación de Arquitectura Unificada basado en el set más nuevo y avanzado de la OPC Foundation, permite a los Servidores OPC trabajar con cualquier tipo de datos.. En conjunto, los tres primeros tipos de Servidores OPC se conocen como Servidores OPC "Clásicos" para distinguirlos de OPC UA que se convertirá en la base de las futuras arquitecturas OPC. 17.
(34) 2. Marco Teórico. C]. ~. OPC Client .~ ,OPC Server Communications •(1 or many OPC Olents). {>. OPC. o. OPC Server. ~~~. ~...:;.:-:-...:.::-J 1. '1.. '. e~. OPC Server • Data Source Communications (1 or many Oita Sources). Fig. 2.1: Descripción de la funcionalidad del servidor OPC. 2.2.6.1. FsGateway FS Gateway es un programa que actúa como un convertidor de protocolo de comunicaciones de Microsoft Windows. FS Gateway puede utilizarse para vincular clientes y fuentes de datos que se comunican utilizando diferentes protocolos de acceso a datos. Las reglas básicas para FS Gateway se compone de: •. Una instancia de FS Gateway puede funcionar por nodo.. •. FS Gateway puede ser configurado para ejecutarse como un servicio (automático o manual) o no como un servicio.. •. FS Gateway puede ser activada y desactivada mediante el DAServer Manager. •. FS Gateway puede ser activado como un servidor COM (OPC Server) utilizando mecanismos de activación COM estándar.. 18.
(35) 2. Marco Teórico FS Gateway se comunica con las fuentes y los clientes que utilicen uno de los siguientes protocolos de comunicaciones de datos:. OPC Suitelink™ DDE FastDDE -. ArchestrA Message Exchange. 2.3. CONTROLADORES LOGICOS PROGRAMABLES La ingeniería de control se ha desarrollado a través del tiempo. En el pasado los humanos eran el método para controlar los sistemas. En tiempos recientes la electricidad se ha utilizado para el control, los primero controles eléctricos fueron los relevadores. Los relevadores permiten encender o apagar un circuito eléctrico sin necesidad de un interruptor mecánico, el cual fue inventado por Joseph Henry en. 1835. Un controlador lógico programable (Programmable Logic Controller) es un dispositivo operado digitalmente, que usa una memoria para el almacenamiento interno de instrucciones con el fin de implementar funciones específicas, tales como lógica, secuencial, registro y control de tiempos, conteo y operaciones aritméticas, para controlar a través de entradas/salidas digitales o analógicas, varios tipos de máquinas o procesos Los PLC's operan de manera secuencial y cíclica, es decir, una vez finalizado el recorrido completo de un programa, comienza a ejecutar su primera instrucción.. 2.3.1. Componentes •. Unidad central de proceso.. •. Módulos de entrada.. •. Módulos de salida.. •. Fuente de alimentación.. •. Memoria de almacenamiento.. •. Puertos de comunicación.. 19.
(36) 2. Marco Teórico a) Unidad central de proceso (CPU): este toma las decisiones relacionadas al. control de la maquina o proceso. Realiza las operaciones aritméticas y lógicas que recibe de las entras de diferentes dispositivos de censado, las cuales procesa y almacena en su memoria para luego controlar los dispositivos de salida de acuerdo al resultado de la lógica programada. b) Módulos de entrada: este elemento recibe las señales directamente de los. elementos primarios de control. e) Módulos de salida: estos elementos envían señales a los elementos finales de. control d) Fuente de alimentación: brinda energía de corriente continua a los diferentes. elementos electrónicos que conforman el controlador. La entrada de alimentación puede ser de corriente alterna o corriente continua típicamente de 110VAC, 220 VAC o 24VDC, etc. e) Memoria de almacenamiento: es aquí donde el controlador almacena toda la. información que necesita para ejecutar la tarea es decir, datos del proceso y datos de control. Existen varios tipos de memoria RAM, ROM, EPRON Y EEPRON. f) Puertos de comunicación: permite al controlador intercambiar información con. dispositivos, ya sean otros controladores, HMI, PC, unidad de red, etc. r~--- -- ----·--- -·--- -~~·-~-~- -------- --~ ------------------ ---- ---------:. J. :~. ''. 1. ¡ ¡. :'. ~. 'M~ulode.. .,.. :. '. ~... i. :'. r. i. "D ". ;:. .. (b. (ft. 0. -.!!. ll!. ol! ,;;;,. !~ J:. ~". 11. '-3. : •. 1:. Salidas. 1. t. t. t. '. ¡'. :. :. 11. ~·. t. J. . .i. ll. w"D. :; !l ~e. :. :. I. ''. ". l !;. I!:J. 1. :: .... !. l I. ~:. .r;. :. ,. ~. Comunleaclón. .! Entmlas. .. Allmenlaclón. ''. :. .:i: .. :. ·--~-----------------------------,·-------------~-------------~-----J. Fig. 2.2: Elementos de un controlador lógico programable. 20.
(37) 2. Marco Teórico. 2.3.2. Distribución de los PLC's Debido a la gran variedad de tipos distintos de PLC, tanto en sus funciones, en su capacidad, en el número de 1/0, en su tamaño de memoria, en su aspecto físico y otros, es que le permite al usuario final, escoger entre tantas gamas para cada aplicación que se requiera y esto hace posible clasificar los distintos tipos en varias categorías. •. PLC tipo Nano. Generalmente PLC de tipo compacto (Fuente, CPU e 1/0 integradas) que puede manejar un conjunto reducido de 1/0, generalmente en un número inferior a 1OO. Permiten manejar entradas/salidas digitales y algunos módulos especiales. •. PLC Compactos. Estos PLC tienen incorporado la Fuente de Alimentación, su CPU y módulos de 110 en un solo módulo principal y permiten manejar desde unas pocas 110 hasta varios cientos ( alrededor de 500 110 ) , su tamaño es superior a los Nano PLC y soportan una gran variedad de módulos especiales, tales como: -. Entradas y salidas análogas. -. Módulos contadores rápidos. -. Módulos de comunicaciones. - · Interfaces de operador. •. PLC Modulares. Su característica principal es la de que existe un módulo para cada uno de los diferentes elementos que componen el PLC como puede ser una fuente de alimentación, CPU, E/S, etc. La sujeción de los mismos se hace por riel DIN, placa perforada o sobre RACK, en donde van alojado el BUS externo de unión de los distintos módulos que lo componen. Son los PLC de gama alta los que suelen tener una estructura modular, que permiten una gran flexibilidad en su constitución.. 21.
(38) 2. Marco Teórico. 2.3.3. Lenguajes de Programación de los PLC's En la actualidad cada fabricante diseña su propio software de programación, lo que significa que existe una gran variedad comparable con la cantidad de PLC ·s que hay en el mercado. De acuerdo al estándar lEC 1131-3, este define dos lenguajes gráficos y dos lenguajes basados en texto, para la programación de PLC's. Los lenguajes gráficos utilizan símbolos para programar las instrucciones de control, mientras los lenguajes basados en texto, usan cadenas de caracteres para programar las instrucciones.. •. Lenguajes Gráficos: Diagrama Ladder (LO) -. •. Diagrama de Bloques de Funciones (FBD). Lenguajes Textuales: -. Lista de Instrucciones (JL). -. Texto Estructurado (ST). 2.3.3.1. Lenguaje Ladder El Ladder, también denominado lenguaje de contactos o de escalera, es un lenguaje de programación gráfico muy popular dentro de Jos Controladores Lógicos Programables (PLC), debido a que está basado en Jos esquemas eléctricos de control clásicos. De este modo, con los conocimientos que todo técnico eléctrico posee, es muy fácil adaptarse a la programación en este tipo de lenguaje. Su principal ventaja es que los símbolos básicos están normalizados según normas NEMA y son empleados por todos los fabricantes.. Hl- -·-·- -v -·-·-·- --( Fig.2.3: Programación en lenguaje Ladder.. 22.
(39) 2. Marco Teórico 2.3.4. PLC Micrologix. La gama de los MicroLogix representa una familia de controladores que tiene en su lista a los ya populares MicroLogix 1000, MicroLogix 1100, MicroLogix 1200, MicroLogix 1400 y MicroLogix 1500, están diseñados para ampliar la cobertura de aplicaciones mediante entradas analógicas incorporadas, comunicaciones Ethernet y capacidades de visualización. Los controladores MicroLogix 1400 y 1100 mantienen las mismas funciones críticas que se esperan de la familia MicroLogix y expande esa capacidad para incluir una verdadera edición en línea. Los controladores. MicroLogix,. incluyen. controladores. más. sencillos. para. las. aplicaciones que requieren de hasta 80 E/S digitales. 2.3.4.1. Micrologix 1100 (1763-L 16AWA). Estos controladores pueden usar en entornos industriales siempre y cuando se instalen según las instrucciones que se dan en los respectivos manuales. Este equipo está diseñado para ser empleado en entornos limpios y secos y con circuitos que no excedan la categoría de sobretensión. Este elemento posee una alimentación eléctrica de 120/240 VCA y tiene un total de 10 entradas digitales (120 VCA), 06 salidas a relé todas individualmente aisladas y 02 entradas de voltaje analógicas, se pueden insertar hasta 04 módulos de expansión. 2.3.4.2. Micrologix 1400 (1766-L32AWA). Posee las mismas características de protección que el Micrologix 11 00, lo único que cambia es el número de entradas y salidas tanto digitales como analógicas. Este dispositivo tiene una alimentación eléctrica de 110/220 VCA y posee 20 entradas digitales (120 VCA), 12 salidas a relé todas individualmente aisladas y 06 entradas analógicas, se pueden insertar hasta 07 módulos de expansión.. Cada controlador admite un puerto integrado combinado RS-232 1 RS-485 para comunicación en serie y en red, así como un segundo puerto integrado EtherNet/IP, que admite mensajería Ethernet de igual a igual.. 23.
(40) 2. Marco Teórico La pantalla de cristal líquido incorporada le permite monitorear el estado de. las E/S. y del controlador, así como hacer cambios a datos de enteros y de bits. Un sistema operativo actualizable instantáneamente en el sitio protege su inversión y asegura que siempre estará al día con los adelantos más recientes.. 2.4. SENSORES Son los elementos que detectan o sensan cambios en el valor de la variable controlada. A menudo se denominan elementos primarios de control y en algunos casos forman parte de un bloque con el llamado transmisor o aquel que recibe la salida del sensor y adapta esta señal con fines de transmitirla, a este conjunto se le denomina transductor. En general, la respuesta de un sensor determina cuan bien se va efectuar la medición, el registro o control de una variable; y su selección es el resultado de conocer bien las características de un proceso. Algunas de las características mas importantes de un sensor o transductor que definen la calidad de los mismos son la exactitud, linealidad, resolución, etc. Otro aspecto importante es el denominado tiempo de respuesta o tiempo necesario para que el dispositivo entregue la información final. En la medida que este retardo se pueda minimizar, se tendrá un mejor control del proceso.. 2.4.1. Tipos de Sensores •. Sensores Analógicos: cuando la señal puede tomar un número infinito de valores bien diferenciados dentro de un margen o lo que es mismo, que la señal varia en forma continua dentro de dicho intervalo. Normalmente presenta problemas relacionados con la presencia de ruido, interferencias y distorsión.. •. Sensores Digitales: cuando la señal solo puede tener un número finito de valores bien diferenciados dentro de un margen, es decir, que la función varía de forma discreta. Cada vez es más común que los sensores tengan una salida numérica.. 24.
(41) 2. Marco Teórico •. Sensores Todo o Nada: estos sensores son aquellos en los que la salida solo presenta dos estados, los cuales están separados por un valor umbral de la variable detectada.. •. Sensores Mecánicos: Son dispositivos que cambian su comportamiento bajo la acción de una magnitud física que pueden directa o indirectamente transmitir una señal que indica cambio.. •. Sensores de No Contacto: Como su nombre lo indica, la característica principal es el hecho de que permiten detectar el objeto sin que se necesario el contacto físico. Esto confiere una capacidad de maniobra mucho mayor y además permite mantener inalterable el sistema de control.. 2.4.2. Sensores Ultrasónicos Como su nombre lo indica, la característica principal es el hecho de que permiten detectar el objeto sin que se necesario el contacto físico. Esto confiere una capacidad de maniobra mucho mayor y además permite mantener inalterable el sistema de control. Además, según el tiempo que transcurre en ir y regresar el pulso sónico, se puede determinar la distancia entre el sensor y el objeto. Las ondas sónicas solo pueden irradiarse si existe un medio. Este medio puede ser, para el caso del ultrasonido un gas, un fluido o un material rígido. Normalmente los sensores ultrasónicos se emplean bajo presión atmosférica. Tanto los delfines y ballenas, así como también los murciélagos utilizan la técnica del ultrasonido para comunicarse. 2.4.2.1. Principio de funcionamiento El circuito electrónico de control activa periódicamente el amplificador de potencia, de modo que se genere durante un período de tiempo (200 ms) un voltaje senoidal muy grande (400 Vpp). El convertidor acústico trabaja en este momento como si fuese un parlante y envía un pulso ultrasónico (Burst) desde 1OOms - 1 ms en el rango de 40 - 400 kHz.. 25.
(42) 2. Marco Teórico El convertidor acústico necesita un tiempo entre dos a tres veces el tiempo de emisión del sonido para que se tranquilice otra vez. Después de que se haya tranquilizado, la electrónica de control activa el modo de funcionamiento de recepción. En este caso el convertidor acústico trabaja como si fuese un micrófono. Si el pulso ultrasónico incide en un objeto, se origina una reflexión del pulso, que excitará el convertidor acústico. Este último generará una oscilación senoidal que irá al amplificador. Alimentació Electrónica de Control. Salidas Salida digital ylo análoga. ,Filtro. .... +; 1. Fig.2.4: Diagrama de un trasmisor ultrasónico.. 2.4.2.2. Medidor de Nivel Ultrasónico Se basa en la emisión de un impulso ultrasónico a una superficie reflectante y la recepción del eco del mismo en un receptor. El retardo en la captación del eco depende del nivel del tanque.. 1 \. i \ l \ 1. \. J. \. i. \. Fig.2.5: Transmisor de Nivel Ultrasónico. 26.
(43) 2. Marco Teórico Existen aplicaciones donde el sensor se coloca en el fondo del tanque, envía un impulso eléctrico que es convertido mediante un transductor a un impulso ultrasónico de corta duración, que es transmitido a través de la pared del tanque hacia el líquido. El impulso se refleja en la superficie del líquido y retorna hasta el transductor ultrasónico. El nivel del tanque viene expresado por:. v.t. h=2. Donde: h= nivel del líquido. v= velocidad del sonido en el líquido. t= tiempo de transito del sonido La aplicación típica es situar el emisor en la parte superior del tanque y dirigir el impulso ultrasónico a la superficie del líquido para ser reflejado y retornar al receptor. El transductor del receptor realiza los cálculos para convertir esta distancia en el nivel del líquido en el tanque. La medida del nivel en estas condiciones puede ser afectada por varios factores: •. La velocidad del sonido en el líquido que varía con la temperatura, de modo que un ambiente que pase de. ooc a ?ooc da lugar a un error del 12% en la. medida del nivel. Este efecto puede compensarse mediante un sensor de temperatura. •. La presencia de espuma en la superficie del líquido que absorbe el sonido.. •. La turbulencia extrema en el seno del líquido y el movimiento de la superficie del líquido (olas, etc.), que puede compensarse con un circuito amortiguador o temporizador en el instrumento.. •. El material y el estado de las paredes del tanque, las curvaturas del tanque y las obstrucciones.. 27.
(44) 2. Marco Teórico La exactitud de estos instrumentos es de unos ± 5mm o bien del ± 0.25% al ± 1%. Los instrumentos son adecuados para todos los tipos de tanques y de líquidos o fangos, pudiendo construirse a prueba de explosión. Presentan el inconveniente de ser sensibles a la densidad de los fluidos y de dar señales erróneas si hay obstrucciones en el interior del tanque o bien cuando la superficie del nivel del líquido no es nítida, como es el caso de un líquido que forme espuma, ya que se producen falsos ecos de los ultrasonidos. La utilización del microprocesador permite, a través de un programa, almacenar el perfil ultrasónico del nivel, y así tener en cuenta las características particulares de la superficie del liquido, tal como la espuma, compensando con el software los falsos ecos y las variaciones de la velocidad del sonido, con lo cual se mejora la exactitud de la medida. Por otro lado, el ordenador facilita la conversión del nivel a volumen del tanque para usos de inventario y además proporciona características de auto comprobación del instrumento.. 2.4.2.3. Medidor de Flujo Ultrasónico. Estos transductores se basan en el fenómeno ultrasónico caracterizado porque las pequeñas perturbaciones de presión en el seno de un fluido se propagan a la velocidad del sonido correspondiente al fluido. Si, además, el fluido posee también velocidad, entonces la velocidad absoluta de la propagación de la perturbación de presión es la suma algebraica de ambas. En la práctica, las pequeñas perturbaciones de presión son pequeñas crestas de onda sinusoidales cuya frecuencia está por encima del rango audible para el ser humano, sobre unos 20 KHz, siendo 1OKHz el valor habitual. Se aplica a un cristal una energía eléctrica, en forma de una pequeña perturbación de voltaje a alta frecuencia, provocando un estado de vibración. Si el cristal está en contacto con el fluido, esta vibración se transmite a este y se propaga a su través.. 28.
(45) 2. Marco Teórico El haz cónico proyectado desde un cristal circular tiene un semi-ángulo "a" dado por la siguiente ecuación: 1.2A.. a=-D Donde:. a= Angulo de la trayectoria del sonido con el eje de la tubería. A.= Longitud de onda del líquido. D= Diámetro de la tubería.. En otras técnicas de medición se mide la diferencia de fases o la diferencias de frecuencias entre las ondas del sonido que recorren el fluido en ambos sentidos. El sensor puede ser fijado con abrazaderas al exterior de la tubería o bien puede estar montado dentro de la tubería en contacto con el fluido.. ¡'. Fig.2.6: Medidor de flujo ultrasónico. Los transductores ultrasónicos con un solo haz tienen una exactitud del ± 2% al ± 3% y un intervalo de medida de caudales de 20 a 1 con una escala lineal. Con dos haces, la exactitud alcanza± 0.5%.. 29.
Figure


+7




Documento similar
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
De acuerdo con Harold Bloom en The Anxiety of Influence (1973), el Libro de buen amor reescribe (y modifica) el Pamphihis, pero el Pamphilus era también una reescritura y
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
De hecho, este sometimiento periódico al voto, esta decisión periódica de los electores sobre la gestión ha sido uno de los componentes teóricos más interesantes de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
