Inverse kinematics of a humanoid robot with non-spherical hip: a hybrid algorithm approach
Texto completo
Figure
![Figure 1. SILO2 Humanoid Robot [23]](https://thumb-us.123doks.com/thumbv2/123dok_es/6843047.837087/2.892.463.796.848.1114/figure-silo-humanoid-robot.webp)



Documento similar
Abstract: This work develops the design of a mobile manipulator robot that aims to be able to pick up, transport and place an object.. The robot moves by itself
It is, however, not possible to dissociate the quantitative aspects of the problem (increase in youth un~mployment) from its qualitative aspects. The matching of
In this sense, a generic operation defined over a hybrid concept is similar to the template method design pattern [23], as the required operations will be provided with an
This project belongs to the visual servoing field, as its main purpose is tracking and controlling the motion of a robot in real time using visual feedback provided by an
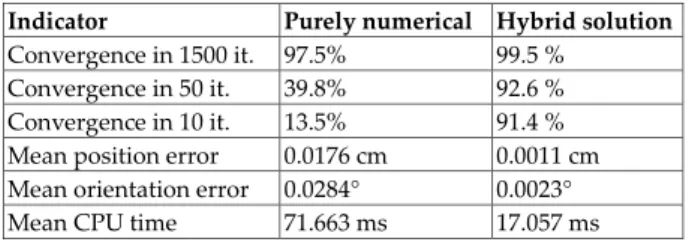
This time is almost 150 times higher than that required by the proposed method (0.03 s). The results corresponding to the pre- conditioned Tikhonov regularization method were
The problem with the Washington Consensus was that its success in eliminating inflation relied on high levels of capital inflows that produced byproducts that were crucial to its
In the present study, it was possible to observe that the nurses demonstrated the situation of professional grief from different points of view: in some cases, they felt like
This article described a detailed approach to the analysis carried out by the hip team and its medical IT col- laborators to develop a customized titanium implant that allowed
